TUGAS AKHIR
PERANCANGAN SISTEM PENGIRIMAN DATA SENSOR ALTITUDE
YANG TERPASANG PADA MIKROKONTROLER ARDUINO
MENGGUNAKAN PROTOKOL XBEE
Diajukan untuk memenuhi salah satu persyaratan dalam
menyelesaikan Pendidikan Sarjana (S-1) pada Departemen Teknik Elektro Sub Konsentrasi Sistem Pengaturan dan Komputer
Oleh
MICHAEL ANTHONY NIM : 100402040
DEPARTEMEN TEKNIK ELEKTRO
FAKULTAS TEKNIK
UNIVERSITAS SUMATERA UTARA
MEDAN
LEMBAR PENGESAHAN TUGAS AKHIR
PERANCANGAN SISTEM PENGIRIMAN DATA SENSOR ALTITUDE YANG TERPASANG PADA MIKROKONTROLER ARDUINO
MENGGUNAKAN PROTOKOL XBEE
Oleh :
• Ketua Penguji : Ir. T. Ahri Bahriun, M.Sc
MICHAEL ANTHONY 100402040
Tugas Akhir ini diajukan untuk melengkapi salah satu syarat untuk mememperoleh gelar Sarjana Teknik pada
DEPARTEMEN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS SUMATERA UTARA MEDAN
Sidang pada tanggal 18 bulan April tahun 2015 di depan Penguji:
• Anggota Penguji : Ir. Kasmir Tanjung, M.T
Disetujui oleh: Pembimbing,
SOEHARWINTO, S.T., M.T. NIP : 19710527 200003 1 001
Diketahui oleh:
Ketua Departemen Teknik Elektro FT USU,
i
ABSTRAK
Ketinggian atau altitude merupakan posisi vertikal suatu objek dari titik tertentu yang berada pada suatu daerah. Pengukuran ketinggian objek yang diam ataupun bergerak akan lebih efisien jika menggunakan sebuah sistem. Sebuah alat yang terpasang pada objek akan mengukur ketinggian objek dan mengirimkannya secara jarak jauh ke sisi penerima tanpa harus mengikuti objek. Hasil pengukuran ketinggian objek dapat dilihat oleh penerima secara periodik dalam bentuk grafik pada sebuah laptop.
Dalam Tugas Akhir ini akan dirancang sistem pengiriman data sensor
altitude dengan protokol xbee. Sistem dirancang menggunakan kit mikrokontroler Arduino, xbee, dan perangkat lunak scilab. Sistem yang dirancang dapat mengukur objek yang berada pada jarak 17 meter ke arah vertikal permukaan bumi secara Line Of Sight. Namun, pengukuran ketinggian secara tidak LOS tidak dapat dilakukan pada jarak yang jauh.
ii
KATA PENGANTAR
Segala puji syukur penulis haturkan kehadirat Tuhan Yang Maha Esa yang telah memberikan kemampuan dan kesehatan dalam menyelesaikan Tugas Akhir ini.
Tugas Akhir ini merupakan bagian dari kurikulum yang harus diselesaikan untuk memenuhi persyaratan menyelesaikan pendidikan Sarjana Strata Satu di Departemen Teknik Elektro, Fakultas Teknik, Universitas Sumatera Utara. Adapun judul Tugas Akhir ini adalah :
“PERANCANGAN SISTEM PENGIRIMAN DATA SENSOR ALTITUDE
YANG TERPASANG PADA MIKROKONTROLER ARDUINO
MENGGUNAKAN PROTOKOL XBEE”
Tugas Akhir ini penulis persembahkan kepada yang teristimewa yaitu ayahanda Tjong Kian Fah dan ibunda Nelly Edy yang senantiasa memberikan perhatian dan kasih sayang sejak penulis lahir hingga sekarang, serta abang-abang tercinta Barry Anthony dan Yansen Anthony yang senantiasa mendukung dan memberi semangat untuk menyelesaikan Tugas Akhir ini.
Selama penulis menjalani pendidikan di kampus hingga diselesaikannya Tugas Akhir ini, penulis banyak menerima bantuan, bimbingan, dan dukungan dari berbagai pihak. Untuk itu dalam kesempatan ini penulis ingin mengucapkan terima kasih kepada :
iii 2. Bapak Ir. Surya Tarmizi Kasim, M.Si. selaku Penasehat Akademis penulis,
atas bimbingan dan arahannya dalam melayani perkuliahan selama ini. 3. Bapak Ir. Surya Tarmizi Kasim, M.Si. dan Bapak Rahmad Fauzi, S.T, M.T
selaku Ketua dan Sekretaris Departemen Teknik Elektro Fakultas Teknik Universitas Sumatera Utara.
4. Bapak Ir. T. Ahri Bahriun, M.Sc dan Bapak Ir. Kasmir Tanjung selaku dosen penguji Tugas Akhir, atas masukan dan bantuannya dalam penyempurnaan Tugas Akhir ini.
5. Seluruh staf pengajar yang telah memberi bekal ilmu kepada penulis dan seluruh pegawai Departemen Teknik Elektro, Fakultas Teknik, Universitas Sumatera Utara atas segala bantuannya.
6. Teman – teman K3M Rolette-X Team USU yang selama ini membantu dan memfasilitasi penulis untuk menyelesaikan Tugas Akhir ini.
7. Teman – teman UKM Robotik Sikonek USU yang selama ini membantu dan memfasilitasi penulis untuk menyelesaikan Tugas Akhir ini.
8. Teman – teman di Teknik Elektro FT-USU, terkhusus angkatan 2010 atas dukungan, do’a, suka dan duka selama di bangku perkuliahan.
9. Abang-abang senior stambuk 2009 yang selalu membantu, mendukung dan memberi masukan selama menjalani perkuliahan.
10. Keluarga Besar Laboratorium Sistem Pengaturan dan Komputer DTE FT USU.
11. Keluarga Besar J-Corporation yang telah memberikan banyak sekali dukungan dan pembelajaran.
iv Penulis menyadari bahwa Tugas Akhir ini masih banyak kekurangan baik dari segi materi maupun penyajiannya. Oleh karena itu saran dan kritik dengan tujuan menyempurnakan dan mengembangkan kajian dalam bidang ini sangat penulis harapkan.
Akhir kata penulis berserah diri pada Tuhan Yang Maha Esa, semoga Tugas Akhir ini bermanfaat bagi pembaca sekalian terutama bagi penulis sendiri.
Medan, April 2015 Penulis
v
1.5 Metodologi Penelitian ... 3
1.6 Sistematika Penulisan ... 4
BAB II. TEORI DASAR ... 5
2.1 Pengukuran Ketinggian ... 5
2.2 Komunikasi Data ... 6
2.2.1 Wireless Sensor Network ... 7
2.2.1.1 Wireless Sensor Network Physical Layer ... 8
2.2.1.2 Wireless Sensor Network Medium Access Control Layer ... 10
2.2.2 ZigBee ... 10
2.2.2.1 ZigBee Frame ... 12
2.2.3 Serial Data Communication ... 13
2.3 Mikrokontroler ... 16
2.3.1 Arsitektur Mikrokontroler ... 16
2.3.2 Universal Asynchronous Transmitter / Receiver ... 19
2.3.3 Inter-Integrated Circuit ... 20
2.4 Pemrograman ... 20
BAB III. PERANCANGAN SISTEM ... 22
3.1 Gambaran Umum Sistem ... 22
3.2 Perancangan Perangkat Keras ... 24
3.2.1 Pengukuran Arus pada Xbee dan Alat Pengukur Ketinggian ... 27
3.3 Perancangan Perangkat Lunak ... 29
3.3.1 Konfigurasi Xbee ... 32
vi
3.3.3 Scilab ... 33
BAB IV. ANALISIS DAN PENGUJIAN ... 36
4.1 Umum ... 36
4.2 Hasil Pengujian Sistem ... 36
4.2.1 Line Of Sight ... 37
4.2.2 Tidak LOS ... 42
4.3 Analisis Data ... 43
4.3.1 Line Of Sight ... 43
4.3.2 Tidak LOS ... 45
4.3.3 Konsumsi Daya ... 45
4.3.4 Kestabilan Sensor ... 46
4.3.5 Perbedaan Jangkauan Jarak Outdoor dan Indoor ... 47
BAB V. KESIMPULAN DAN SARAN ... 48
5.1 Kesimpulan ... 48
5.2 Saran ... 48
DAFTAR PUSTAKA ... ix
vii
DAFTAR GAMBAR
Gambar 2.1 Arsitektur Wireless Sensor Node ... 8
Gambar 2.2 Komponen dari Sistem Komunikasi Digital ... 9
Gambar 2.3 ZigBee danIEEE 802.15.4 ... 11
Gambar 2.4 ZigBeeDataFrame ... 12
Gambar 2.5 ZigBee MAC dan NWK Header ... 13
Gambar 2.6 RS-232 to USB menggunakan FT232R ... 14
Gambar 2.7 Komponen Mikrokontroler... 17
Gambar 2.8 Paket Data UART ... 20
Gambar 3.1 Blok Diagram Sistem ... 22
Gambar 3.2 Diagram Rangkaian ... 25
Gambar 3.3 Alat Pengukur Ketinggian ... 26
Gambar 3.4 Xbee dan Kabel Mini USB ... 26
Gambar 3.5 Multimeter Digital Heles UX 880 TR dan Jepit Buaya ... 27
Gambar 3.6 Titik Ukur pada Modul Xbee ... 28
Gambar 3.7 Titik Ukur pada Alat... 29
Gambar 3.8 Diagram Alir Sistem Pengukuran Ketinggian ... 30
Gambar 3.9 Diagram Alir Rutin ... 31
Gambar 4.1 Tampilan Data Perumahan Lantai 5 pada Grafik ... 37
Gambar 4.2 Tampilan Data Gedung T3 Lantai 4 DTE USU pada Grafik ... 39
Gambar 4.3 Tampilan Data Perumahan Lantai 3 pada Grafik ... 40
viii
DAFTAR TABEL
Tabel 2.1 Protokol Wireless Sensor Network Lapisan Bawah ... 7
Tabel 2.2 Pin DB 9 dan DB 25 ... 14
Tabel 4.1 Hasil Pengukuran Ketinggian di Perumahan Lantai 5 ... 37
Tabel 4.2 Hasil Pengukuran Ketinggian di Gedung T3 DTE USU ... 38
Tabel 4.3 Hasil Pengukuran Ketinggian di Perumahan Lantai 3 ... 40
Tabel 4.4 Hasil Pengukuran Ketinggian di Perumahan Lantai 2 (LOS) .. 41
Tabel 4.5 Hasil Pengukuran Ketinggian di Perumahan Lantai 2 (Tidak LOS) ... 42
i
ABSTRAK
Ketinggian atau altitude merupakan posisi vertikal suatu objek dari titik tertentu yang berada pada suatu daerah. Pengukuran ketinggian objek yang diam ataupun bergerak akan lebih efisien jika menggunakan sebuah sistem. Sebuah alat yang terpasang pada objek akan mengukur ketinggian objek dan mengirimkannya secara jarak jauh ke sisi penerima tanpa harus mengikuti objek. Hasil pengukuran ketinggian objek dapat dilihat oleh penerima secara periodik dalam bentuk grafik pada sebuah laptop.
Dalam Tugas Akhir ini akan dirancang sistem pengiriman data sensor
altitude dengan protokol xbee. Sistem dirancang menggunakan kit mikrokontroler Arduino, xbee, dan perangkat lunak scilab. Sistem yang dirancang dapat mengukur objek yang berada pada jarak 17 meter ke arah vertikal permukaan bumi secara Line Of Sight. Namun, pengukuran ketinggian secara tidak LOS tidak dapat dilakukan pada jarak yang jauh.
1
BAB I
PENDAHULUAN
1.1 Latar Belakang
Ketinggian atau altitude adalah posisi vertikal suatu objek dari titik tertentu yang berada pada suatu daerah. Titik referensi yang biasa digunakan adalah permukaan laut. Ketinggian suatu tempat dapat diukur oleh manusia menggunakan alat secara manual. Objek yang berada pada suatu daerah yang tinggi juga dapat diukur oleh manusia. Namun, ketinggian objek yang bergerak akan membuat manusia kewalahan untuk mengukurnya sehingga tidak efisien bagi si pengukur untuk mengikutinya. Apalagi, ketinggian objek yang melayang, akan sangat sulit bagi manusia untuk mengukur secara manual.
1.2 Perumusan Masalah
Merancang sebuah sistem untuk mengirimkan data altitude secara periodik dari objek bergerak vertikal keatas ke penerima data di lokasi tetap di permukaan bumi.
1.3. Tujuan Penulisan
Penulisan Tugas Akhir ini bertujuan untuk merancang sebuah sistem untuk mengirim data dari sensor altitude yang terletak pada suatu ketinggian ke penerima (laptop) menggunakan protokol IEEE 802.15.4.
1.4 Batasan Masalah
Agar isi dan pembahasan Tugas Akhir ini menjadi terarah, maka penulis perlu membuat batasan masalah yang akan dibahas. Adapun batasan masalah pada penulisan Tugas Akhir ini adalah sebagai berikut :
1. Hanya membahas tentang Wireless Sensor Network. 2. Hanya membahas komukasi data serial I2C dan UART. 3. Hanya membahas pemrograman Arduino dan Scilab. 4. Hanya membahas tentang BMP085.
5. Hanya membahas tentang konfigurasi Xbee.
1.5 Metodologi Penelitian
Metode penelitian yang digunakan adalah : 1. Studi literatur dan bimbingan
Metode ini dilakukan dengan membaca teori-teori yang berkaitan dengan topik Tugas Akhir ini dari buku-buku referensi baik yang dimiliki oleh penulis atau di perpustakaan dan juga dari artikel-artikel, jurnal, internet dan lain-lain.
2. Perancangan Sistem
Melakukan perancangan sistem sesuai dengan kaidah perancangan sistem, yang terdiri atas :
a. BMP085 sebagai sensor ketinggian. b. Arduino UNO.
c. 2 buah Xbee pro s2b. d. Laptop ASUS A43SA.
e. Perangkat lunak Scilab 5.5.1 sebagai GUI. 3. Ujicoba dan analisis data
Yaitu melakukan ujicoba sistem yang telah dirancang dengan mengukur ketinggian beberapa tempat dan menganalisis data.
4. Menarik kesimpulan
1.6 Sistematika Penulisan
Tugas Akhir ini disusun berdasarkan sistematika penulisan sebagai berikut :
BAB I PENDAHULUAN
Bab ini merupakan pendahuluan yang berisi tentang latar belakang masalah, tujuan dan manfaat penulisan, batasan masalah, metode dan sistematika penulisan.
BAB II TEORI DASAR
Bab ini membahas tentang spesifikasi sistem, teori dasar setiap komponen, Wireless Sensor Network, dan perangkat lunak yang digunakan.
BAB III PERANCANGAN SISTEM
Bab ini berisi penjelasan tentang sistem secara umum.
BAB IV ANALISIS SISTEM
Bab ini berisi tentang hasil sistem yang telah dirancang dan telah di ujicoba.
BAB V PENUTUP
5
BAB II
TEORI DASAR
2.1 Pengukuran Ketinggian
Ketinggian merupakan posisi vertikal suatu objek dari titik tertentu yang berada pada suatu daerah. Ketinggian suatu daerah dipengaruhi oleh suhu dan tekanan udara. Tekanan udara disebabkan oleh gravitasi, dimana udara yang bermassa ditarik untuk berada sedekat mungkin dengan tanah. Sedangkan perubahan tekanan udara disebabkan oleh perbedaan suhu, dimana semakin tinggi suhu udara maka semakin tinggi pula tekanan udara pada daerah tersebut. Maka semakin tinggi suatu daerah, semakin rendah suhu udara yang menyebabkan tekanan udara menjadi rendah. Dengan menggunakan sebuah sensor, ketinggian suatu objek dapat diukur dengan menggunakan data tekanan dan temperatur [1].
Ketinggian dalam satuan meter dapat dihitung dengan rumus barometrik internasional, yaitu [2] :
... 2.1
Keterangan :
p = tekanan udara pada ketinggian h (hPa) po = tekanan permukaan air laut (1013,25 hPa) L = gradien suhu (0,0065 Kelvin/meter) h = ketinggian (meter)
M = massa molar (0,0289644 kg/mol)
R = konstanta gas universal (8,31447 J/mol.K)
Sehingga dengan mensubstitusikan nilai konstanta yang ada, maka diperoleh nilai h (meter) :
... 2.2
2.2 Komunikasi Data
Pada awal tahun 2000an, para pemasok alat sensor meneliti cara-cara dalam memperkenalkan standarisasi. Jaringan nirkabel biasanya mengirim ukuran data sederhana yang kecil. Untuk aplikasi dalam gedung, perancang mengesampingkan standar IEEE 802.11b (Wi-Fi / Wireless Fidelity) untuk sensor karena terlalu kompleks dan bandwidth yang besar. Sistem infrared
memerlukan line of sight, dimana tidak selalu dapat dicapai. Teknologi
bluetooth (IEEE 802.15.1) awalnya dipandang memungkinkan namun segera
dianggap kompleks dan mahal. Ini membuka kesempatan bagi standar baru IEEE 802.15.4 bersamaan dengan ZigBee (ZigBee bergerak pada lapisan diatas IEEE 802.15.4). IEEE 802.15.4 beroperasi pada frekuensi 2,4 GHz dan kecepatan transmisi data hingga 250 kbps pada jarak 30 sampai 200 kaki. ZigBee / IEEE 802.15.4 dirancang untuk menyempurnakan teknologi nirkabel seperti bluetooth, Wi-Fi, dan ultra-wideband (UWB) serta aplikasi dimana koneksi kabel tidak memungkinkan, rendah daya dan biaya [3].
Peneliti telah mengembangkan banyak protokol baru khusus untuk
yang penting. Jaringan merupakan komponen yang penting dalam jaringan sensor dan standar mempunyai peranan penting. Tabel 2.1 menunjukkan beberapa protokol lapisan bawah yang diaplikasikan dalam wireless sensor network [3].
Tabel 2.1 Protokol Wireless Sensor Network Lapisan Bawah [3]
GPRS/GSM 1XRTT/CDMA
IEEE
802.11b/g IEEE 802.15.1 IEEE 802.15.4 Nama standar
di penjualan 2.5G/3G Wi-Fi Bluetooth ZigBee
Sasaran
Wireless Sensor Network (WSN) adalah suatu jaringan nirkabel yang terdiri dari kumpulan simpul sensor yang tersebar di suatu area tertentu
(sensor field). Setiap simpul sensor memiliki kemampuan untuk
mengumpulkan data dan berkomunikasi dengan simpul sensor lainnya [3].
Wireless sensor node merupakan elemen utama dalam sebuah wireless
sensor network. Simpul tersebut terdiri atas pendeteksian, pemrosesan,
Converter (ADC) sendiri yang dapat dihubungkan secara langsung ke prosesor melalui protokol chip-to-chip. Hubungan sistem komunikasi ke sistem prosesor dapat digunakan Serial Peripheral Interface (SPI) serial bus. Beberapa transceiver mempunyai prosesor sendiri untuk melakukan proses sinyal tingkat rendah yang berhubungan dengan physical layer dan data link layer [4].
Gambar 2.1 Arsitektur Wireless Sensor Node [4]
Standar IEEE 802.15.4 dibuat untuk alat berdaya rendah yang beroperasi pada frekuensi 868 MHz, 915 MHz, dan 2,45 GHz. Kecepatan data standar ini adalah 20, 40, dan 240 kbps. IEEE 802.15.4 berfokus pada spesifikasi dua lapisan rendah dalam protokol (physical layer dan data link layer) [4].
2.2.1.1 Wireless Sensor Network Physical Layer
sampling rate menjadi dua kali sinyal bandwidth) sehingga tidak ada informasi yang hilang. Setelah sampling, sinyal diskrit akan dikonversi ke dalam bentuk biner. Proses ini disebut source encoding [4].
Gambar 2.2 Komponen dari Sistem Komunikasi Digital [4]
Channel encoding bertujuan untuk memastikan sinyal yang dikirim kuat terhadap derau (noise) dan gangguan. Setelah channel encoding, sinyal akan dimodulasi, proses dimana sinyal baseband diubah menjadi sinyal bandpass. Tujuan utama modulasi adalah untuk mengirim dan menerima sinyal dengan antena yang pendek. Selanjutnya, sinyal yang dimodulasi harus diperkuat dan energi listrik diubah menjadi energi elektromagnetik oleh antena transmitter dan sinyal dipropagasi melalui media nirkabel ke tujuan yang diinginkan [4].
menjadi sinyal baseband melalui proses demodulasi dan pendeteksian. Sinyal baseband menjalani proses pembentukan pulsa dan dua tahap
decoding (kanal dan sumber) untuk mendapatkan urutan simbol-simbol
yang mempresentasikan sinyal analog asli yaitu pesan [4].
2.2.1.2 Wireless Sensor Network Medium Access Control Layer
Medium nirkabel digunakan bersama oleh beberapa alat jaringan. Oleh karena itu, sebuah mekanisme diperlukan untuk mengatur akses ke medium. Ini merupakan tugas lapisan kedua yaitu data link layer. Berdasarkan referensi IEEE 802, lapisan ini dibagi menjadi logical link control layer dan medium access control layer. Medium Access Control
(MAC) layer beroperasi langsung diatas physical layer. Fungsi utama
MAC layer adalah untuk menentukan kapan sebuah simpul dapat
mengakses medium dan untuk menyelesaikan konflik antara simpul-simpul. MAC layer juga bertanggung jawab atas memperbaiki kesalahan komunikasi (communication error) yang terjadi pada physical layer dan menjalankan aktivitas lain seperti framing, addressing, dan flow control
[4].
2.2.2 ZigBee
ZigBee mempunyai elemen yang sama dengan Open System Interconnection (OSI) layer yaitu physical, MAC, dan network (NWK)
Object (ZDO) layer. Seperti spesifikasi IEEE 802.15.4, ZigBee menggunakan dua Service Access Point (SAP) setiap lapisan, dimana satu untuk data dan satu untuk pengaturan. Sebagai contoh, semua komunikasi data dari dan ke jaringan melewati Network Layer Data Entity Service Access Point (NLDE-SAP) [5].
IEEE 802.15.4 mendefinisikan dua lapisan paling bawah, yaitu
Medium Access Control (MAC) layer dan physical layer. Physical layer
menerjemahkan paket menjadi gelombang elektromagnetik dan sebaliknya.
MAC layer menyediakan konsep dari jaringan, termasuk Personal Area
Network Identity (PAN ID), dan beberapa perintah untuk menghubungkan
dan membentuk jaringan. Arsitektur ZigBee dapat dilihat pada gambar 2.3 [5].
Gambar 2.3 ZigBee dan IEEE 802.15.4 [5]
satu tujuan, dan memastikan paket terkirim dari simpul ke yang lain. APS
layer bertanggung jawab atas menyaring dan membuang paket untuk
endpoint (sebuah jalur maya yang menghubungkan simpul, satu simpul
mempunyai 240 endpoint) yang tidak ada di simpul, paket yang tidak sesuai dengan identitas, serta paket duplikat. ZDO layer bertanggung jawab atas pengaturan jaringan lokal dan nirkabel, pencarian simpul lain dan layanan dalam jaringan, serta bertanggung jawab atas status dari simpul itu sendiri di jaringan [5].
2.2.2.1 ZigBee Frame
Sebuah paket data ZigBee yang lengkap terdiri dari MAC, NWK, APS, dan ZigBee Cluster Library (ZCL) frame yang dapat dilihat pada gambar 2.4. Lapisan yang lebih tinggi berada di dalam lapisan yang lebih rendah sehingga NWK frame berada di dalam MAC frame dan seterusnya [5].
Gambar 2.4 ZigBee Data Frame [5]
Ukuran dari setiap frame tergantung pada parameter. MAC frame
diakhiri dengan Frame Check-Sum (FCS) yang berfungsi untuk memastikan bit data benar. NWK frame diakhiri dengan NWK Auxiliary
siapapun untuk mengubah paket. NWK Auxiliary Header dan NWK MIC ada hanya pada jaringan yang aman[5].
Gambar 2.5 ZigBee MAC dan NWK Header [5]
MAC dan NWK keduanya mempunyai alamat tujuan dan sumber. Sebagai contoh, simpul A mengirim paket ke simpul F. Pengiriman pertama adalah dari A ke B, berikutnya adalah B ke C dan seterusnya. Sumber dan tujuan MAC akan berubah sesuai dengan perjalanan sedangkan alamat sumber dan tujuan NWK tidak [5].
2.2.3 Serial Data Communication
Tabel 2.2 Pin DB 9 dan DB 25 [6]
Nomor pin (9 pin D-sub)
Nomor pin
(25 pin D-sub) Sinyal Sumber Tipe Deskripsi
1 8 CD DCE Kontrol Carrier detect
2 3 Rx DCE Data Receive data
3 2 Tx DTE Data Transmit data
4 20 DTR DTE Kontrol Data terminal
ready
5 7 SG – – Signal ground
6 6 DSR DCE Kontrol Data set ready
7 4 RTS DTE Kontrol Request to
send
8 5 CTS DCE Kontrol Clear to send
9 22 RI DCE Kontrol Ring indicator
- 1, 9 – 19, 21,
23 – 25
Tidak
digunakan – – –
Gambar 2.6 RS-232 to USB menggunakan FT232R [6]
Ferrite bead adalah sebuah komponen pasif yang digunakan untuk
diradiasikan ke kabel USB. Tx membawa data dari DTE ke DCE sedangkan Rx membawa data dari DCE ke DTE. DCE menyatakan CTS (Clear To Send) ketika siap untuk menerima data dan DTE menyatakan RTS (Request
To Send) ketika siap untuk menerima data. Sebelum mengirim, komputer
membaca keluaran flow control komputer lain. Jika keadaan sinyal mengindikasikan bahwa penerima belum siap menerima data, maka pengirim menunggu [6].
Transfer data Universal Serial Bus (USB) rentan terhadap delay yang tidak biasanya muncul pada sistem yang digunakan untuk transfer data menggunakan interupsi. Bandar Communication (COM) pada Personal
Computer (PC) berhubungan langsung dengan motherboard dan bebas dari
interupsi. Ketika sebuah karakter dikirim atau diterima, Central Processing
Unit (CPU) akan diinterupsi dan menuju ke rutin untuk mengurus data
tersebut. Ini berarti dengan baud rate dan kecepatan data tertentu, transfer data dapat dicapai tanpa memerlukan flow control. Dengan begitu, data dapat ditransfer tanpa menggunakan handshaking dan tetap sampai pada PC tanpa kehilangan [7].
dan tergantung pada kecepatan data. Untuk kecepatan yang sangat tinggi, ukuran paket terbesar diperlukan [7].
2.3 Mikrokontroler
2.3.1 Arsitektur Mikrokontroler
Secara sederhana dapat disebutkan bahwa mikrokontroler adalah mikroprosesor yang dilengkapi dengan periferal dan peralatan pendukung yang tidak dimiliki mikroprosesor. Mikrokontroler menerapkan arsitektur Harvard yang menyimpan program dan data dalam memori yang terpisah. Dengan arsitektur Harvard ini, penjemputan instruksi dapat dilaksanakan secara bersamaan dengan pemindahan data. Terdapat beberapa produsen mikrokontroler, antara lain : Intel dengan rumpun MCS-51 dan AVR, Motorola dengan rumpun MC68HC, National dengan rumpun COP8, Mikrochip dengan rumpun PIC, yang masing-masing juga ditawarkan dalam puluhan tipe, mulai dari yang sederhana sampai dengan yang sudah kompleks. Mikrokontroler ini juga sudah dibuat dalam teknologi Reduced Instruction Set Computer (RISC) dan RISC-like, dimana satu instruksi dapat dilaksanakan dalam satu periode penabuh (clock) dasar [8].
Secara umum, terdapat tujuh komponen dalam mikrokontroler, yaitu [8] :
1. Prosesor (CPU)
mikrokontroler pada umumnya dipetakan sebagai memori atau
Random-Access Memory (RAM). Semua kegiatan ini diserempakkan
oleh penabuh (clock) yang dibangkitkan oleh pembangkit penabuh (Clock Generator) yang dicatu oleh osilator kristal, Resistor-Capasitor
(RC) atau sumber luar.
Gambar 2.7 Komponen Mikrokontroler [8]
2. Read-Only Memory (ROM)
ROM digunakan untuk menyimpan data yang bersifat permanen. Dalam mikrokontroler, program disimpan dalam ROM, Electrically
Erasable Programmable Read-Only Memory (EEPROM) atau Flash
ROM. Ada mikrokontroler yang dapat ditambah ROM eksternal di luar serpih mikrokontroler. Dalam beberapa mikrokontroler, EEPROM juga digunakan untuk menyimpan data.
3. Random-Access Memory (RAM)
dan sebagian dari RAM digunakan sebagai register prosesor, dikatakan register dipetakan sebagai memori.
4. Pewaktu
Pewaktu (timer) adalah counter (pencacah) yang digunakan untuk membangkitkan pulsa atau deretan pulsa pada saat-saat tertentu atau dengan frekuensi tertentu. Pulsa ini digunakan sebagai interupsi internal untuk memulai atau mengakhiri kegiatan tertentu. Dalam kebanyakan mikrokontroler, pencacah ini adalah pencacah naik, berbeda dengan pencacah turun yang diterapkan dalam sistem mikroprosesor.
5. Bandar Input/Output (I/O)
Bandar I/O (I/O ports) yang dipetakan sebagai memori terdiri atas bandar paralel dan bandar seri yang pada umumnya mempunyai kemampuan tristate. Arah aliran bandar data pada umumnya dipilih melalui register arah (Data Direction Register atau DDR).
6. Interupsi
General Interrupt Enable (GIE) dalam register status. Di samping itu ada juga interupsi yang tidak dapat dihalang (unmaskable).
7. Bus
Bus adalah saluran yang membawa sinyal-sinyal perangkat keras. Sebagaimana dalam mikroprosesor, bus dibedakan atas bus data, alamat, dan kontrol. Bus data membawa data antara register dan memori atau I/O. Ukuran bus ini menunjukkan ukuran data (bit) yang disimpan dalam setiap register atau memori. Bus alamat menunjuk nomor alamat memori dari/ke mana data disimpan. Ukuran bus ini menunjukkan ukuran memori yang dapat diakses prosesor. Bus kontrol membawa sinyal-sinyal yang mengendalikan kegiatan sistem termasuk di dalamnya sinyal-sinyal pewaktuan dan interupsi. Bus data dan bus alamat bersifat dua arah sedangkan bus kontrol bersifat satu arah.
2.3.2 Universal Asynchronous Transmitter / Receiver
Universal Asynchronous Transmitter / Receiver (UART) adalah bagian dari sebuah perangkat keras atau integrated circuit yang digunakan dalam komunikasi serial antara komputer atau periferal. UART mengkonversi data diantara bentuk paralel dan serial. UART biasanya sudah termasuk ke dalam mikrokontroler [9].
bit start, banyaknya bit stop dan bit data harus dikonfigurasi diantara dua UART untuk berkomunikasi [10].
Gambar 2.8 Paket Data UART [10]
2.3.3 Inter-Integrated Circuit
Inter-Integrated Circuit (I2C) adalah bus serial sinkron half-duplex. I2C mempunyai 2 bidirectional bus, yaitu Serial Clock (SCL) dan Serial
Data Analyzer (SDA). Setiap induk menghasilkan sinyal penabuh
masing-masing sehingga alat-alat yang berkomunikasi harus sinkronisasi kecepatan penabuh mereka. Jika tidak, budak yang lambat dapat salah mendeteksi alamatnya pada bus SDA sementara induk yang cepat sedang mengirim data ke alat ketiga [4].
2.4 Pemrograman
dan simulasi sistem dinamis, dan manipulasi simbolik. Scilab adalah alternatif
open source yang lengkap dari Matlab [11].
Scilab memuat ratusan fungsi matematis. Beberapa fungsi yang ada di dalam scilab [11] :
• Matematika dan simulasi untuk aplikasi teknik dan sains umum termasuk operasi matematis dan analisis data.
• Visualisasi dua dimensi dan tiga dimensi yaitu fungsi grafis untuk menggambarkan dan menjelaskan serta membuat dan menyesuaikan berbagai macam jenis plot dan grafik.
• Rancangan dan analisis sistem kontrol.
• Pemrosesan sinyal menggambarkan, menganalisis dan menapis sinyal dalam domain waktu dan frekuensi.
• Xcos – pemodelan dan simulasi sistem dinamis seperti pemodelan sistem mekanik, rangkaian hidrolik.
Sistem operasi yang dapat digunakan untuk scilab 5.5.1 yaitu [12] :
• Windows : 32-bit dan 64-bit untuk Windows XP, Windows Vista, Windows 7, dan Windows 8.
• Mac OS dengan perangkat lunak java 6 : Mac OS X 10.6.x (Snow Leopard), Mac OS X 10.7.x (Lion), Mac OS X 10.8.x (Mountain Lion), Mac OS X 10.9.x (Mavericks), dan Mac OS X 10.10.x (Yosemite).
22
BAB III
PERANCANGAN SISTEM
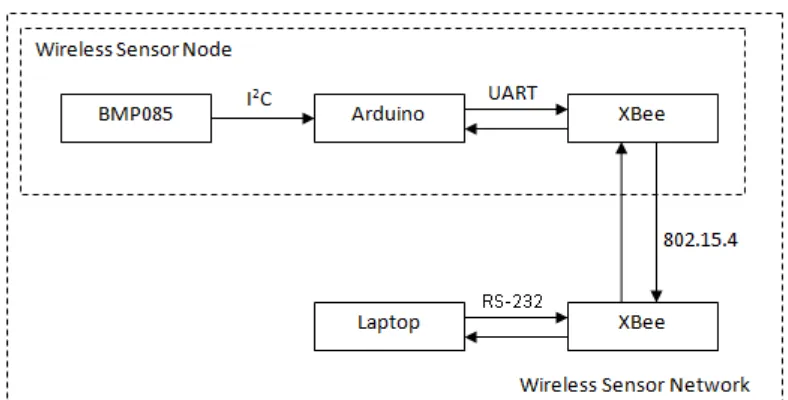
3.1 Gambaran Umum Sistem
Pada tugas akhir ini akan dirancang sebuah sistem pengiriman data sensor
altitude yang terpasang pada mikrokontroler Arduino menggunakan protokol
xbee. Alat yang terpasang pada objek mengirim data ketinggian objek secara jarak jauh ke laptop. Blok diagram sistem yang dirancang dapat dilihat pada gambar 3.1.
Gambar 3.1 Blok Diagram Sistem
Spesifikasi Sistem :
-. Menggunakan baterai 9 Volt.
-. Dalam keadaan pengiriman dan penerimaan, alat membutuhkan arus sebesar 104 – 108 mA.
-. Dalam keadaan pengiriman dan penerimaan, xbee membutuhkan arus sebesar 54 – 59 mA.
-. Ketinggian mencapai 100 meter (indoor) dan 1500 meter (outdoor). -. Jangkauan temperatur : -40 – 85 oC.
Cara kerja :
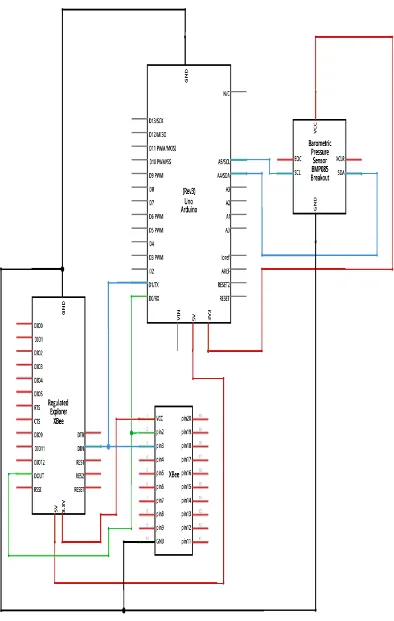
3.2 Perancangan Perangkat Keras
Diagram rangkaian alat pengukur ketinggian pada sisi objek dapat dilihat pada gambar 3.2. Xbee terpasang pada Xbee USB Adapter (RegulatedExplorer
Gambar 3.3 Alat Pengukur Ketinggian
Pada sisi penerima, terdapat xbee yang terpasang pada Xbee USB Adapter
dan dihubungkan pada laptop (komputer) dengan menggunakan kabel mini USB seperti gambar 3.4.
3.2.1 Pengukuran Arus pada Xbee dan Alat Pengukur Ketinggian
Untuk mengetahui besarnya arus yang dibutuhkan oleh alat pengukur ketinggian pada saat standby dan pengiriman/penerimaan data, pengukuran arus dilakukan secara manual dengan menggunakan multimeter digital Heles UX 880 TR. Function switch multimeter diputar ke mA DC. Probe merah dihubungkan ke terminal mA dan probe hitam dihubungkan ke terminal COM. Jepit buaya digunakan untuk menghubungkan probe ke titik ukur.
Gambar 3.5 Multimeter Digital Heles UX 880 TR dan Jepit Buaya
Pengukuran dilakukan pada dua titik ukur yang berbeda yaitu : 1. Titik ukur pada modul xbee
untuk meminta data dari alat pengukur ketinggian. Arus diukur dan dicatat ketika data dikirim dari alat ke laptop.
Gambar 3.6 Titik Ukur pada Modul Xbee
2. Titik ukur pada alat
Pengukuran pada titik ukur ini dilakukan untuk mengetahui besar arus yang dibutuhkan oleh alat. Probe 1 dihubungkan ke kutub positif baterai dan probe 2 dihubungkan ke kutub positif colokan Arduino seperti gambar. Saklar X dihidupkan dan saklar catu daya dimatikan. Perintah dikirim dari scilab pada laptop untuk meminta data dari alat pengukur ketinggian. Arus diukur dan dicatat ketika data dikirim dari alat ke laptop.
1
Gambar 3.7 Titik Ukur pada Alat
3.3 Perancangan Perangkat Lunak
Perangkat lunak dibuat dengan menggunakan bahasa pemrograman untuk Arduino. Diagram alir perangkat lunak yang dirancang untuk sistem pengukuran ketinggian dapat dilihat pada gambar 3.8. Ketika alat ini diberi catu daya, Arduino UNO akan menginisialisasi variabel yang akan digunakan dalam program dan menunggu perintah dari pengguna yang dikirim melalui xbee.
Jika terdapat perintah yang diterima oleh Arduino UNO, maka Arduino akan meminta data dari BMP085 dan mengirimnya ke sisi pengguna. Data akan berhenti dikirim jika terdapat perintah dari pengguna atau setelah 10 detik. Kode program sistem pengukuran ketinggian dapat dilihat pada lampiran.
1
3.3.1 Konfigurasi Xbee
Konfigurasi kedua xbee dilakukan dengan menggunakan perangkat lunak XCTU yang dikembangkan oleh Digi International. Parameter yang dikonfigurasi antara lain :
• Personal Area Network Identity (PAN ID) yaitu identitas dimana xbee harus terhubung. Hanya modul-modul dengan PAN ID yang sama yang dapat saling berkomunikasi.
• Scan Channels (SC) yaitu mengatur dan membaca daftar kanal.
• Destination Address High (DH) yaitu mengatur dan membaca 32 bit
atas dari 64 bit alamat modul tujuan.
• Destination Address Low (DL) yaitu mengatur dan membaca 32 bit
bawah dari 64 bit alamat modul tujuan. Parameter ini diisi dengan alamat modul tujuan. DH dan DL disatukan untuk mendefinisikan alamat tujuan yang digunakan untuk transmisi.
3.3.2 Kit Mikrokontroler Arduino
Library yang digunakan untuk perangkat Arduino dalam sistem
pengukuran ketinggian adalah Wire.h dan Adafruit_BMP085.h. Objek sensor BMP085 berupa “tinggi” dan variabel “input” berupa char dideklarasikan pada inisialisasi program. Kode program dapat dilihat pada lampiran 1.
Pada fungsi loop, program akan menunggu masukan berupa input yang dikirim dari user (scilab). Jika terdapat masukan berupa “R”, Arduino UNO akan mengirim string “Ready” dan ditampilkan di scilab. Jika masukannya berupa “P”, Arduino UNO akan menyuruh sensor BMP085 untuk melakukan pengukuran dan data tersebut akan dikirim dan ditampilkan di scilab secara real-time.
3.3.3 Scilab
Jendela aplikasi dibuat dengan menggunakan createWindow() sebagai objek bernama gui. Ukuran, nama, warna latar, dan posisi diinisialisasi pada awal program. Ukuran window gui tidak dapat diatur. Handles
dideklarasikan di awal program sehingga penggunaan handles tidak akan menimbulkan error. Kode program dapat dilihat pada lampiran 2.
Tombol “Connect” akan memanggil fungsi connect dimana jika radio (xbee sisi pengguna ke xbee sisi Arduino) belum terhubung (GUIstatus = 0) maka objek radio berupa serial dengan COM port 6 dan baud rate 9600 akan dibentuk dan dihubungkan serta string ”Ready” akan ditampilkan pada kotak status. Jika radio telah terhubung (GUIstatus = 1) dan tombol
“Connect” ditekan, maka akan muncul kotak dialog dengan pesan “Laptop
telah terhubung ke Arduino”.
“Disconnect” ditekan, maka akan muncul kotak dialog dengan pesan “Silahkan mengecek koneksi”.
Tombol “Plot” akan memanggil fungsi dataPlot dimana data akan diterima dan digambarkan dalam 10 detik atau sampai diinterupsi. PLOTstatus = 1 menunjukkan bahwa data sedang diterima dan penggambaran grafik sedang berlangsung. Fungsi ini akan membuat SAVEstatus = 1 yang berarti bahwa sudah ada data yang dapat disimpan.
Terdapat 40 data sampel yang diterima dan digambarkan dalam 10 detik, sehingga waktu yang diperlukan dalam penerimaan dan penggambaran sampel harus dihitung. Setiap pelaksanaan perintah dalam scilab membutuhkan waktu 1 ms. Pelaksanaan perintah plot membutuhkan 41 ms. Perintah sleep digunakan untuk menunda waktu dalam satuan ms dan untuk pelaksanaannya membutuhkan waktu 1 ms. Terdapat 5 perintah, 1 perintah plot, dan 1 perintah sleep yang dilaksanakan dalam perulangan. Berikut perhitungan untuk perintah sleep :
Tundaan waktu yang dibutuhkan = 250 ms
Pelaksanaan perintah sleep membutuhkan waktu 1 ms, sehingga :
membuat SAVEstatus = 1 yang berarti bahwa sudah ada data yang dapat disimpan meskipun nantinya ada beberapa data yang bernilai 0.
Tombol “Load” akan memanggil fungsi callDataLoad. Objek guiLoad berupa Window dibuat dan berisikan 2 kolom teks yang dapat diketik dan 1 tombol “Load” yang akan memanggil fungsi dataLoad. Nama berkas untuk H1 dan H0 yang akan dimuat diketik di kedua kolom teks tersebut. Fungsi dataLoad akan memuat data dengan data dari nama berkas yang telah diketik sebelumnya. Grafik akan digambar ulang dengan data yang telah dimuat. Fungsi ini akan membuat SAVEstatus = 0 dimana data yang dimuat tidak dapat disimpan.
36
BAB IV
ANALISIS DAN PENGUJIAN
4.1 Umum
Di dalam bab ini akan dilakukan pengujian terhadap rancangan sistem pengiriman data sensor altitude yang terpasang pada mikrokontroler Arduino menggunakan protokol xbee. Pengujian-pengujian yang dilakukan pada rancangan sistem ini bertujuan untuk mengetahui proses kerja, kinerja, dan hasil sistem apakah telah bekerja sesuai dengan yang diharapkan atau tidak.
Pengujian diawali dengan mengukur ketinggian permukaan tanah dan kemudian diukur ketinggian objek pada suatu tempat. Pengujian juga dibedakan untuk pengujian Line Of Sight (LOS) dan tidak LOS.
Adapun rumus yang digunakan dalam pengujian sistem, antara lain : ... 4.1
... 4.2
Keterangan :
ΔH = ketinggian tempat terhadap permukaan tanah (meter)
H1 = ketinggian tempat terhadap permukaan laut (meter) H0 = ketinggian permukaan tanah (meter)
Href = ketinggian referensi (meter)
4.2 Hasil Pengujian Sistem
4.2.1 Line Of Sight
1. Ketinggian referensi (Href) : 17 meter
Tabel 4.1 Hasil Pengukuran Ketinggian di Perumahan Lantai 5 Detik ke- H1 (meter) H0 (meter) ΔH (meter) %Ralat
1 53,42 36,281 17,139 0,817
2 54,17 36,281 17,889 5,229
3 53,67 36,281 17,389 2,288
4 53,84 36,281 17,559 3,288
5 54,68 36,281 18,399 8,229
6 53,76 36,281 17,479 2,817
7 54,09 36,281 17,809 4,758
8 54,17 36,281 17,889 5,229
9 53,34 36,281 17,059 0,347
10 53,42 36,281 17,139 0,817
Rata-rata 53,856 36,281 17,575 3,382
Pengujian sistem secara LOS dilakukan di perumahan lantai 5 Jalan Sutomo Ujung No. 67B Medan. Hasil pengukuran ketinggian dapat dilihat pada tabel 4.1.
Tampilan data pada grafik untuk ketinggian perumahan lantai 5 dapat dilihat pada gambar 4.1.
Maka persen ralat dari ketinggian rata-rata :
2. Ketinggian referensi (Href) : 12 meter
Tabel 4.2 Hasil Pengukuran Ketinggian di Gedung T3 DTE USU
Detik ke- H1 (meter) H0 (meter) ΔH (meter) %Ralat
1 64,22 52,729 11,491 4,242
2 64,14 52,729 11,411 4,908
3 64,73 52,729 12,001 0,008
4 64,14 52,729 11,411 4,908
5 65,06 52,729 12,331 2,758
6 65,48 52,729 12,751 6,258
7 64,14 52,729 11,411 4,908
8 65,23 52,729 12,501 4,175
9 64,81 52,729 12,081 0,675
10 63,55 52,729 10,821 9,825
Rata-rata 64,55 52,729 11,821 4,267
Maka persen ralat dari ketinggian rata-rata :
Gambar 4.2 Tampilan Data Gedung T3 Lantai 4 DTE USU pada Grafik
3. Ketinggian referensi (Href) : 8 meter
Pengujian sistem secara LOS dilakukan di perumahan lantai 3 Jalan Pukat VI No. 79 Medan. Hasil pengukuran ketinggian dapat dilihat pada tabel 4.3. Tampilan data pada grafik untuk ketinggian perumahan lantai 3 dapat dilihat pada gambar 4.3.
Tabel 4.3 Hasil Pengukuran Ketinggian di Perumahan Lantai 3 Detik ke- H1 (meter) H0 (meter) ΔH (meter) %Ralat
1 41,96 33,633 8,327 4,088
2 39,71 33,633 6,077 24,038
3 41,71 33,633 8,077 0,963
4 41,63 33,633 7,997 0,038
5 41,55 33,633 7,917 1,038
6 42,47 33,633 8,837 10,463
7 40,96 33,633 7,327 8,413
8 41,71 33,633 8,077 0,963
9 41,13 33,633 7,497 6,288
10 42,55 33,633 8,917 11,463
Rata-rata 41,538 33,633 7,905 6,775
Gambar 4.3 Tampilan Data Perumahan Lantai 3 pada Grafik
4. Ketinggian referensi (Href) : 4 meter
tabel 4.4. Tampilan data pada grafik untuk ketinggian perumahan lantai 2 dapat dilihat pada gambar 4.4.
Tabel 4.4 Hasil Pengukuran Ketinggian di Perumahan Lantai 2 (LOS) Detik ke- H1 (meter) H0 (meter) ΔH (meter) %Ralat
1 38,2 33,701 4,499 12,475
2 38,45 33,701 4,749 18,725
3 37,37 33,701 3,669 8,275
4 37,28 33,701 3,579 10,525
5 36,45 33,701 2,749 31,275
6 37,37 33,701 3,669 8,275
7 38,7 33,701 4,999 24,975
8 37,45 33,701 3,749 6,275
9 38,2 33,701 4,499 12,475
10 36,78 33,701 3,079 23,025
Rata-rata 37,625 33,701 3,924 15,63
Maka persen ralat dari ketinggian rata-rata :
4.2.2 Tidak LOS
1. Ketinggian referensi (Href) : 4 meter
Pengujian sistem secara tidak LOS dilakukan di perumahan lantai 2 Jalan Pukat VI No. 79 Medan. Hasil pengukuran ketinggian dapat dilihat pada tabel 4.5. Tampilan data pada grafik untuk ketinggian perumahan lantai 2 yang diukur secara tidak LOS dapat dilihat pada gambar 4.5.
Tabel 4.5 Hasil Pengukuran Ketinggian di Perumahan Lantai 2 (Tidak
LOS)
Detik ke- H1 (meter) H0 (meter) ΔH (meter) %Ralat
1 53,17 49,341 3,829 4,275
2 54,01 49,341 4,669 16,725
3 53,09 49,341 3,749 6,275
4 53,26 49,341 3,919 2,025
5 53,17 49,341 3,829 4,275
6 52,75 49,341 3,409 14,775
7 54,01 49,341 4,669 16,725
8 53,09 49,341 3,749 6,275
9 53,42 49,341 4,079 1,975
10 53,42 49,341 4,079 1,975
Rata-rata 53,339 49,341 3,998 7,53
Gambar 4.5 Tampilan Data Perumahan Lantai 2 pada Grafik (Tidak LOS)
2. Ketinggian referensi (Href) : 8 meter
Pengujian sistem secara tidak LOS yang dilakukan di perumahan lantai 3 Jalan Pukat VI No. 79 Medan tidak berhasil dilakukan karena data yang dikirim tidak dapat diterima oleh penerima.
4.3 Analisis Data
Berikut ini adalah analisis dari hasil perancangan sistem dan pengujian sistem secara LOS, tidak LOS, dan kestabilan sensor.
4.3.1 Line Of Sight
ketinggian yang seharusnya diperoleh adalah 17 meter. Selisih ketinggian referensi dengan ketinggian rata-rata yang dihasilkan sistem adalah 0,575 meter. Sehingga persen ralat pengukuran sistem adalah 3,382 %.
Percobaan kedua dilakukan di Gedung Teknik Tegangan Tinggi lantai 4 Departemen Teknik Elektro Universitas Sumatera Utara Medan dan penerima berada di daerah terbuka pada lantai 1. Ketinggian rata-rata yang diperoleh adalah 11,824 meter. Sedangkan perkiraan ketinggian yang seharusnya diperoleh adalah 12 meter. Selisih ketinggian referensi dengan ketinggian rata-rata yang dihasilkan sistem adalah 0,176 meter. Sehingga persen ralat pengukuran sistem adalah 1,492 %.
Percobaan ketiga dilakukan pada lantai 3 dan penerima berada di daerah terbuka pada lantai 1. Ketinggian rata-rata yang diperoleh adalah 7,905 meter. Sedangkan perkiraan ketinggian yang seharusnya diperoleh adalah 8 meter. Selisih ketinggian referensi dengan ketinggian rata-rata yang dihasilkan sistem adalah 0,095 meter. Sehingga persen ralat pengukuran sistem adalah 1,1875 %.
4.3.2 Tidak LOS
Percobaan pertama untuk pengujian sistem secara tidak LOS dilakukan pada lantai 2 dan penerima berada di dalam ruangan tertutup pada lantai 1. Ketinggian rata-rata yang diperoleh adalah 3,998 meter. Sedangkan perkiraan ketinggian yang seharusnya diperoleh adalah 4 meter.Selisih ketinggian referensi dengan ketinggian rata-rata yang dihasilkan sistem adalah 0,002 meter. Sehingga persen ralat pengukuran sistem adalah 0,05 %.
Percobaan kedua dilakukan pada lantai 3 dan penerima berada di dalam ruangan tertutup pada lantai 1. Xbee pada sisi penerima tidak dapat menjangkau xbee pada sisi pengirim yang dapat dilihat dari tidak ditampilkannya “Ready” pada kotak status di GUI scilab.
4.3.3 Konsumsi Daya
Tabel 4.6 Hasil Pengukuran Arus
Sampel data ke 21 – 60 dalam 10 detik (4 sampel data per detik)
P 54 – 59 104 – 108
4.3.4 Kestabilan Sensor
4.3.5 Perbedaan Jangkauan Jarak Outdoor dan Indoor
Jangkauan jarak outdoor yang lebih jauh daripada jangkauan jarak
indoor diakibatkan karena di dalam ruangan terdapat pemantulan sinyal oleh dinding dan objek lain yang menyebabkan multipath. Multipath adalah fenomena propagasi dimana sinyal radio mencapai antena melalui dua atau banyak jalur. Multipath menyebabkan fading. Fading dapat menyebabkan sistem komunikasi yang buruk dikarenakan fading dapat mengakibatkan loss pada kekuatan sinyal tanpa mengurangi kekuatan dari derau [13].
Pantulan disekitar pengirim dan penerima menciptakan beberapa jalur yang dapat dilintasi sinyal pengirim. Setiap sinyal mempunyai redaman, delay, dan pergeseran fasa yang berbeda ketika merambat dari sumber ke penerima. Ini dapat menyebabkan interferensi yang membangun atau merusak, penguatan atau peredaman sinyal yang terlihat penerima. Interferensi yang merusak biasanya disebut deep fade dan dapat menyebabkan kegagalan dalam berkomunikasi akibat dari menurunnya
signal-to-noise ratio [13].
48
BAB V
KESIMPULAN DAN SARAN
5.1 Kesimpulan
Dari hasil yang telah diperoleh, maka dapat ditarik kesimpulan :
1. Arus yang dibutuhkan modul xbee pada saat penerimaan dan pengiriman data adalah 54 – 59 mA dan arus yang dibutuhkan alat pengukur ketinggian pada saat penerimaan dan pengiriman data adalah 104 – 108 mA.
2. Pengukuran ketinggian dapat dilakukan dengan baik, yaitu dengan persen ralat < 4 %.
3. Sistem yang dirancang dapat mengukur objek yang berada pada jarak 17 meter ke arah vertikal permukaan bumi secara LOS.
4. Hasil pengukuran ketinggian untuk pengujian LOS dan tidak LOS dengan ketinggian referensi 4 meter hampir sama.
5. Pengukuran ketinggian secara tidak LOS tidak dapat dilakukan pada jarak yang jauh.
5.2 Saran
Beberapa saran yang dapat penulis berikan pada Tugas Akhir ini adalah : 1. Nilai ketinggian yang diperoleh berubah-ubah setiap waktu, sehingga
2. Untuk ketinggian objek yang baru, sebaiknya menggunakan nilai ketinggian ground level yang baru.
ix
DAFTAR PUSTAKA
[1] “Indonesian Wikipedia,” Wikimedia Foundation, Inc., 6 Agustus 2014. [Online]. Available: http://id.wikipedia.org/wiki/Tekanan. [Diakses 11 November 2014]. [2] “English Wikipedia,” Wikimedia Foundation, Inc., 8 November 2014. [Online].
Available: http://en.wikipedia.org/wiki/Atmospheric_pressure. [Diakses 11 November 2014].
[3] K. Sohraby, D. Minoli dan T. Znati, Wireless Sensor Networks : Technology, Protocols, and Applications, New Jersey: John Wiley & Sons, Inc., 2007.
[4] W. Dargie dan C. Poellabauer, Fundamentals of Wireless Sensor Networks : Theory and Practice, United Kingdom: John Wiley and Sons, Ltd., 2010.
[5] D. Gislason, ZigBee Wireless Networking, USA: Newnes, 2008.
[6] J. Axelson, Serial Port Complete : COM Ports, USB Virtual COM Ports, and Ports for Embedded Systems, 2nd penyunt., Madison: Lakeview Research LLC, 2007. [7] AN232B-04 : Data Throughput, Latency and Handshaking, United Kingdom: Future
Technology Devices International Ltd., 2006.
[8] P. Tarigan, Sistem Tertanam, Yogyakarta: Graha Ilmu, 2011.
[9] “English Wikipedia,” Wikimedia Foundation, Inc., 21 March 2015. [Online]. Available:
http://en.wikipedia.org/wiki/Universal_asynchronous_receiver/transmitter. [Diakses 1 April 2015].
[10] Xbee/XBee-PRO OEM RF Modules, Lindon: MaxStream, Inc., 2006. [11] “Scilab,” Scilab Enterprises S.A.S, [Online]. Available:
https://www.scilab.org/scilab/about. [Diakses 25 November 2014]. [12] “Scilab,” Scilab Enterprises S.A.S, [Online]. Available:
https://www.scilab.org/download/requirements. [Diakses 25 November 2014]. [13] “English Wikipedia,” Wikimedia Foundation, Inc., 2 March 2015. [Online]. Available:
Lampiran 1
Kode Program Untuk Perangkat Arduino
#include <Wire.h>
#include <Adafruit_BMP085.h>
Adafruit_BMP085 tinggi; // create a BMP085 object char input;
void setup() {
Serial.begin(9600); Wire.begin(); tinggi.begin(); }
void loop() {
input = Serial.read(); switch(input) {
case 'R': // R is sent from Scilab to ask whether Radio is ready or not Serial.println("Ready");
break;
case 'P': // P is sent from Scilab to command Radio start sending data Serial.println(tinggi.readAltitude());
Lampiran 2
Kode Program Untuk Scilab
/////////////////////////////////////////////////////////////////////////////// // CREATE A WINDOW AND ITS COMPONENTS ///////////////////////////////////////////////////////////////////////////////
clear;
// A place for Status Text
handles.frame4status = uicontrol(gui, 'Relief', 'solid', ...
'Style', 'frame', 'Position', [403069580], ...
'HorizontalAlignment', 'center', ...
'Background', [111]);
// Title for the place of Status Text
handles.frame4statusTitle = uicontrol(gui, 'Style', 'text', 'String', 'Status', ...
set(handles.txtStatus,"String","Welcome");
/////////////////////////////////////////////////////////////////////////////// // A place for Height Variable each second
parameter = [" ""Height"];
awalTabel1 = ["detik 1""detik 2""detik 3""detik 4""detik 5""detik 6", ...
"detik 7""detik 8""detik 9""detik 10"]'; // What is the height now?
handles.txtHeight = uicontrol(gui,'Style', 'text', 'Position', [6004206020], ...
'FontSize', [12], 'FontWeight', 'bold', ...
'HorizontalAlignment', 'left', ...
'Background', [111]);
set(handles.txtHeight,"String","Height :");
handles.txtHeightVar = uicontrol(gui,'Style', 'text', 'Position', [6604205020], ...
set(handles.txtMeter,"String","Meter");
/////////////////////////////////////////////////////////////////////////////// // Creating an Axes
handles.axes1 = newaxes(handles.frame4axes);
// Axes1 title and axis
handles.axes1.title.text = "Height"; handles.axes1.title.font_size = 4;
// Axes1 X label
globalbthpanjangtinggiGUIstatusPLOTstatusSAVEstatusFilePathk
GUIstatus = 0; PLOTstatus = 0; SAVEstatus = 0; k = 0;
panjang = 41; // terdapat 41 sampel data ketinggian
b = zeros(1,panjang); // membuat tempat 1 x 41 untuk data ketinggian
tinggi = zeros(1,10); // variabel untuk data ketinggian per detik
t = 0:0.25:10; // banyaknya waktu sampel
h = 150; // tinggi pada axis Y
FilePath = 'C:\Users\ASUS\Desktop\DATA\Scilab files\SOD files\';
/////////////////////////////////////////////////////////////////////////////// // CALLBACK FOR EACH BUTTON
///////////////////////////////////////////////////////////////////////////////
// Connect to Arduino through Radio
function connect globalradioGUIstatus
// Koneksi antara penerima dan pengirim belum terhubung (GUIstatus = 0)
if GUIstatus == 0then
// Menutup koneksi jika penerima dan pengirim masih terhubung (GUIstatus = 1)
if GUIstatus == 1then
function dataPlot
globalabtzkpanjangheighttinggiradioGUIstatusPLOTstatusSAVEstatus
awalTabel2 = [" "" "" "" "" "" "" "" "" "" "]'; table = [parameter; [ awalTabel1 awalTabel2 ]];
set(handles.tableTinggi,"String",table); // Menghapus tabel
delete(handles.axes1.children); // Menghapus grafik
// Membuat tombol selain tombol "Stop Plotting" dalam keadaan OFF
// Interrupt and stop the plot
function stop
globalkradioPLOTstatusSAVEstatus
// Load and plot the saved data
function callDataLoad
globalFilePathFileNameH1FileNameH0FullPathguiLoad
globalSAVEstatusFilePathFileNameH1FileNameH0FullPathguiLoad
SAVEstatus = 0;
delete(handles.axes1.children);
//Memuat data b, t, dan tinggi untuk H0 dengan dari file LoadFileNameH0
LoadFileNameH0 = get(FileNameH0,"String");
//Memuat data b, t, dan tinggi untuk H1 dengan dari file LoadFileNameH1
LoadFileNameH1 = get(FileNameH1,"String"); FullPath = strcat([FilePath,LoadFileNameH1]);
load(FullPath,'b','t','tinggi');
globalSAVEstatusFileNameguiSave
if SAVEstatus == 1then
globalbttinggiFilePathFileNameFullPathguiSave
// Menyimpan variabel b, t, dan tinggi ke FullPath
// Disimpan dengan nama SaveFileName
![Gambar 2.1 Arsitektur Wireless Sensor Node [4]](https://thumb-ap.123doks.com/thumbv2/123dok/216742.18910/19.595.124.502.238.420/gambar-arsitektur-wireless-sensor-node.webp)
![Gambar 2.2 Komponen dari Sistem Komunikasi Digital [4]](https://thumb-ap.123doks.com/thumbv2/123dok/216742.18910/20.595.153.473.167.378/gambar-komponen-dari-sistem-komunikasi-digital.webp)
![Gambar 2.3 ZigBee dan IEEE 802.15.4 [5]](https://thumb-ap.123doks.com/thumbv2/123dok/216742.18910/22.595.125.509.404.693/gambar-zigbee-dan-ieee.webp)
![Gambar 2.4 ZigBee Data Frame [5]](https://thumb-ap.123doks.com/thumbv2/123dok/216742.18910/23.595.135.489.502.570/gambar-zigbee-data-frame.webp)
![Gambar 2.5 ZigBee MAC dan NWK Header [5]](https://thumb-ap.123doks.com/thumbv2/123dok/216742.18910/24.595.112.511.146.347/gambar-zigbee-mac-dan-nwk-header.webp)
![Gambar 2.6 RS-232 to USB menggunakan FT232R [6]](https://thumb-ap.123doks.com/thumbv2/123dok/216742.18910/25.595.115.509.398.646/gambar-rs-to-usb-menggunakan-ft-r.webp)
![Gambar 2.7 Komponen Mikrokontroler [8]](https://thumb-ap.123doks.com/thumbv2/123dok/216742.18910/28.595.113.509.221.424/gambar-komponen-mikrokontroler.webp)
![Gambar 2.8 Paket Data UART [10]](https://thumb-ap.123doks.com/thumbv2/123dok/216742.18910/31.595.117.510.151.257/gambar-paket-data-uart.webp)