LAMPIRAN A
PROGRAM MIKROKONTROLER ARDUINO UNO
A.1 final.ino
#include <Sim800l.h>
#include <SoftwareSerial.h> //library!! Sim800l Sim800l; //declare the library //char* text;
//char* number;
val = digitalRead(inputPin); // read input value
int cahaya=analogRead(A2); //<200 ada cahaya
int beban=scale.getGram(); //>13.5 ada beban
Serial.println(beban);
if(pirhasil=1||cahaya>200){ pintu();
Serial.println(pirhasil); Serial.println(cahaya);
DAFTAR PUSTAKA
Astuti, D.R. 2013. Keefektifan Rodentisida Racun Kronis Generasi Ii Terhadap Keberhasilan Penangkapan Tikus. Jurnal Kesehatan Masyarakat. 8 (2) (2013) 183-189(Online)
http://journal.unnes.ac.id/nju/index.php/kemas (diakses 12 Juni 2016)
Chamim, A.N.N. 2010. Penggunan mikrokontroler sebagai pendeteksi posisi menggunakan sinyal GSM. Jurnal Informatika. 4(1): 431-432. (Online)
http://journal.uad.ac.id/index.php/JIFO/article/view/5274 (diakses 12 Juni 2016)
Cruz, E.M.C., Ruiz, J.G., Montiel, L.A.H. 2015. Design and Development of a BlueGS Gateway for Bluetooth and GSM Protocols. International Journal of
Wireless Communications and Mobile Computin. 3(6): 69 (Online)
http://article.sciencepublishinggroup.com/pdf/10.11648.j.wcmc.20150306.12.p df (diakses 12 Desember 2016)
Dewi, S.K. 2013. Perancangan Dan Pembuatan Alat Pendeteksi Keberadaan Alfatokoferol Pada Paprika Hijau Dengan Menggunakan Sensor Warna TCS3200.Tugas Akhir Program Studi S1 Fisika Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Sumatera Utara, Medan. (Online).
http://repository.usu.ac.id/handle/123456789/48986 (diakses 20 Maret 2016)
Kadir, A. 2012. Panduan Praktis Mempelajari Aplikasi Mikrokontroler dan Pemrogramannya Menggunakan Arduino. Yogyakarta: Andi.
Priyadi, D. 2015. Simulasi sistem parkir mobil dua lantai berbasis arduino dengan pengendali android. Skripsi. Universitas Muhammadiyah Surakarta. (Online) http://eprints.ums.ac.id/35612/ (diakses 12 Desember 2016)
Rudiyanto, H.B. 2010. Rancang Bangun Robot Pengantar Surat Menggunakan Mikrokontroler AT89S51, Skripsi. Universitas Gunadarma. (Online)
Rahmalia, D.R., Simamora , S.N.M.P., Dani, M. 2012. Teknik Embedded-system dalam Terapannya untuk membangun Sistem Deteksi Akses-masuk Illegal.
Seminar Nasional Teknologi Informasi & Komunikasi Terapan 2012 (Semantik
2012). 2(1): 2. (Online)
http://publikasi.dinus.ac.id/index.php/semantik/article/view/39/202 (diakses 10 November 2016)
Simanjuntak, M.G. 2013.Perancangan Prototipe Smart Building Berbasis Arduino UNO. Skripsi Ilmu Komputer 2 (6): 6-14.(Online)http://repository.usu.ac.id/ handle/123456789/37482 (13 Maret 2016).
Situmorang, H. 2011. Dasar-Dasar Mikrokontroler MSC-51. Medan: USU Press.
Supatmi, S. 2010. Pengaruh Sensor Ldr Terhadap Pengontrolan Lampu, Majalah
Ilmiah Unikom. 8(2): 175-176. (Online)
http://jurnal.unikom.ac.id/_s/data/jurnal/v08-n02/volume-82-artikel-5.pdf/pdf/volume-82-artikel-5.pdf (diakses 12 Desember 2016)
BAB 3
ANALISIS DAN PERANCANGAN SISTEM
Pada bab ini penulis memaparkan analisis permasalahan yang diangkat yang disajikan dengan diagram dan flowchart serta dipaparkan juga perancangan sistem yang akan dibangun, baik yang berupa perangkat keras ataupun perangkat lunak, cara melakukan pengujian dan bentuk topologi.
3.1 Analisis Sistem
Analisis sistem adalah penguraian suatu sitem yang utuh ke dalam bagian-bagian komponennya dengan maksud untuk mengidentifikasi dan mengevaluasi permasalahan-permasalahan yang terjadi dan kebutuhan yang diharapkan dapat diusulkan perbaikannya.
3.1.1 Analisis Masalah
Analisis masalah adalah mengidentifikasi sebuah masalah, guna untuk memperoleh informasi agar dapat dipecahkan atau deselesaikan.
Masalah utama yang sering terjadi dalam penggunaan perangkap disebuah lingkungan adalah perangkap yang biasa digunakan dibuat untuk langsung membunuh hewan sehingga bau bangkainya sangat mungkin untuk tercium dan perlu pengecekan rutin untuk mengetahui apakah perangkap sudah bekerja atau belum, apakah target perangkap sudah masuk, sudah berapa biunatang yang masuk, sehingga waktu banyak yang terbuang, padahal seharusnya waktu dan tenaga tersebut bisa dipakai untuk melakukan aktivitas yang lain.
3.1.2 Analisis Kebutuhan (Requirement Analyst)
Analisis kebutuhan sistem sangat dibutuhkan untuk mengetahui apakah sistem yang dibuat telah sesuai dengan kebutuhan yang diharapkan atau tidak. Analisis kebutuhan dibagi menjadi dua, yaitu analisis kebutuhan fungsional dan analisis kebutuhan non fungsional.
3.1.2.1Analisis Fungsional
Analisis kebutuhan fungsional adalah untuk mengetahui proses-proses apa saja yang nantinya dilakukan oleh sistem. Berikut ini adalah kebutuhan fungsional dari sistem, yaitu:
1. Perangkap bekerja secara otomatis sesuai program yang telah di-upload sebelumnya.
2. Perangkap memberikan informasi kepada pengguna apakah alat sudah bekerja dengan baik, melalui SMS.
3.1.2.2Analisis Nonfungsional
Untuk mendukung kinerja sistem, sistem juga dapat berfungsi sebagai berikut: 1. Menjaga ekosistem dengan tidak membunuh hewan yang ditangkap.
2. Menjadi acuan informasi mengenai jumlah hewan target yang ada dilokasi. 3. Perangkap menggunakan catu daya berupa baterai yang portable.
3.2 Perancangan Sistem
Pada tahap perancangan sistem akan dibagi menjadi beberapa bagian utama, yaitu diagram Ishikawa, blok diagram, flowchart, penentuan komponen yang digunakan dan perancangan rangkaian tempat perangkap otomatis.
3.2.1 Diagram Ishikawa
sebagai parameter untuk mengkategorikan bahwa objek yang masuk kedalam bisa dikatakan target dengan menggunakan metode IF-ELSE. Masalah yang akan dipecahkan mengenai kekurangan dari ketidak hadiran alat ini akan dijabarkan pada Diagram Ishikawa pada gambar 3.1
Gambar 3.1 Diagram Ishikawa
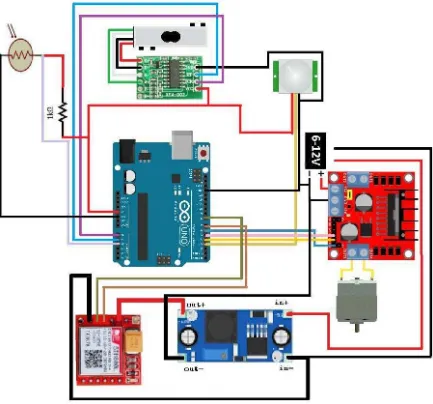
3.2.2 Blok Diagram
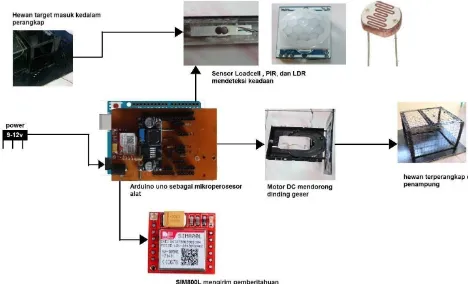
Diagram blok merupakan salah satu bagian terpenting dalam perancangan peralatan elektronika, karena dari diagram blok dapat diketahui prinsip kerja keseluruhan dari rangkaian elektronika yang dibuat. Sehingga keseluruhan blok dari alat yang dibuat dapat membentuk suatu sistem yang dapat bekerja sesuai dengan perencanaan. Diagram blok dari tempat sampah otomatis dapat di lihat pada gambar 3.2.
Adapun fungsi-fungsi blok dari diagram blok sebagai berikut:
1. Blok Power Supply sebagai sumber tegangan ke mikrokontroler dan sensor 2. Blok sensor PIR, LDR, dan Load Cell sebagai pendeteksi hewan yang masuk ke
dalam perangkap
3. Blok Motor DC sebagai penggerak motor, menggeser binatang masuk kedalam perangkap.
4. Blok Arduino Nano sebagai otak dari sistem yang memproses data dari sensor 5. Blok SIM800L sebagai modul untuk mengirimkan informasi kepada user. 6. Blok User sebagai penerima informasi.
3.2.3 Penentuan Komponen Perangkap Otomatis
Penentuan kompenen yang akan dipakai dibagi menjadi dua kelompok, yaitu komponen fisik dan komponen elektronik. Komponen fisik digunakan untuk membuat kerangka perangkap, body utama, mekanika perangkap. Komponen elektronik digunakan untuk merancang rangkaian elektronik. Tabel rincian peralatan dan komponen yang dipakai sebagaimana terlihat pada Tabel 3.1, Tabel 3.2, Tabel 3.3.
Tabel 3.1 Peralatan.
Nama Alat Fungsi
Gerinda Untuk memotong acrylic
Bor duduk Untuk melubangi papan PCB, akrilik, dan komponen lainnya
Solder dan timah Soldering
Penggaris Alat ukur
Obeng Memasang dan membuka baut
Tang Memotong kabel, mengunci mur
Multitester digital Pengukuran satuan listrik (tegangan, arus, dan hambatan)
Glue gun Pengeleman
Cutter Memotong Styrofoam
Tabel 3.2 Komponen Fisik.
Nama Keterangan
Acrylic Body Perangkap
Papan Triplek Alas bawah perangkap
Kawat Dinding perangkap
Tabel 3.3 Komponen Elektronik.
Nama Keterangan
Motor DC Menggeser dinding perangkap Kaber pelangi Konektor komponen listrik ke PCB
SIM800L Pengirim pesan
Modul HX711 Driver Sensor Load Cell
Pin header Female Tempat menyambung komponen
Baterai Sumber arus
Resistor 1k dan
3.2.4 Rangkaian Sensor PIR
Sensor ini memiliki 3 pin yang akan dipasangkan ke mikrokontroler, pin Vcc, pin
Output, dan pin Gnd. Pin Vcc untuk mengalirkan input power daya positif, pin Output
3.2.5 Rangkaian Sensor LDR
Untuk menjalankan sensor LDR dan memberikan program membutuhkan tegangan yang diberi hambatan 1kOhm yang langsung terhubung dengan mikrokontroler arduino sebesar 5 Volt dan perintah input pada salah satu pin. Rangkaian Sensor LDR dapat dilihat pada gambar 3.4.
Gambar 3.4 Rangkaian Sensor LDR
3.2.6 Rangkaian Sensor Loadcell dan Driver HX711
Sensor ini dihidupkan dengan tegangan output 5 Volt dari mikrokontroler arduino melalui pin 5V dan perintah menerima input dari mikrokontroler arduino melalui pin dari DOUT dan SCK. Rangkaian Load Cell dapat dilihat pada gambar 3.5.
3.2.7 Rangkaian Motor DC dengan Driver l298
Untuk mengaktifkan motor DCdibutuhkan sebuah tegangan input yang stabil pada pin IN dari baterai 12 Volt, kemudian dengan menggunakan driver l298 perintah dimasukkan. Termasuk pengaturan nilai kecepatan motor. Rangkaian motor DC dapat dilihat pada gambar 3.6.
Gambar 3.6 Rangkaian Motor DC dengan Driver L298
3.2.8 Rangkaian Modul SIM800L
Untuk menghidupkan modul ini dibutuhkan tegangan khusus yang harus diatur lagi melalui DC to DC Stepdown Converter, yang menurunkan tegangan menjadi 3,4 - 4,4
Volt. Rangkaian SIM800L dapat dilihat pada gambar 3.7.
3.2.9 Rangkaian Sirkuit Utama
Rangkaian sirkuit uatama adalah gabungan dari beberapa rangkaian, yaitu rangkaian sensor PIR, rangkaian sumber arus motor DC dengan driver l298, rangkaian LDR, . rangkaian Load Cell, rangkaian Modul SIM800L dan beberapa rangkaian pin header untuk menghubungkan mikrokontroler arduino dengan komponen elektronik lainnya. Rangkaian sirkuit utama dapat dilihat pada gambar 3.8.
3.2.10 Perancangan PCB (Printed Circuiet Board)
Perancangan PCB pada pembuatan perangkap hewan otomatis ini menggunakan
software PROTEUS 8.0. Proteus adalah sebuah software berbasis windows yang dapat
digunakan untuk mendesain pcb yang juga dilengkapi dengan simulasi pada level skematik sebelum rangkaian skematik di cetak pada PCB.
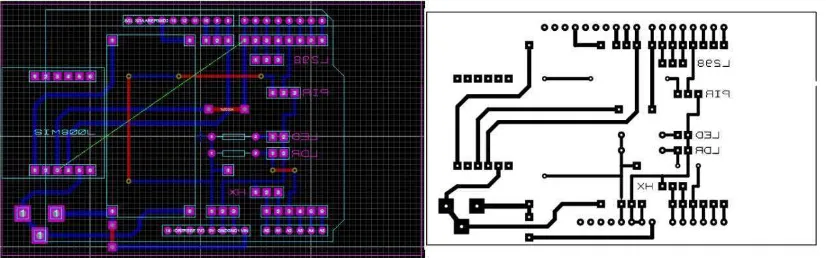
Dengan perancangan yang tepat akan didapatkan layout jalur PCB yang tersusun rapi dan mudah digunakan. Lebar dan jarak antara jalur juga harus diperhitungkan agar tidak terjadi kesalahan atau hubungan singkat akibat jalur yang terlalu rapat dan sempit. Perancangan tata letak PCB dapat dilihat pada gambar 3.9.
Gambar 3.9 Tata Letak Jalur PCB.
Tata letak komponen adalah susunan komponen-komponen elektronika dari gambar diagram skematik yang akan dipasangkan pada permukaan PCB yang berlawanan dengan jalur PCB. Susunan komponen elektronika tersebut harus bersesuaian dengan jalur PCB. Perancangan tata letak komponen PCB dapat dilihat pada gambar 3.10.
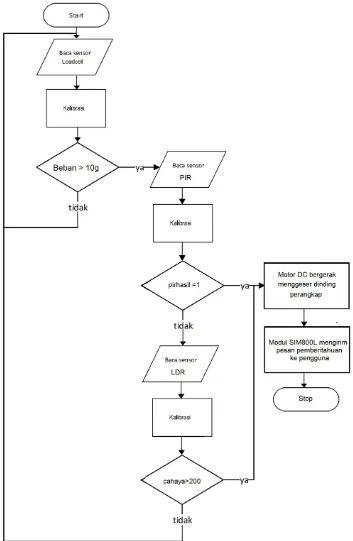
3.2.11 Flowchart
Dalam membuat suatu alat ada beberapa hal yang perlu diperhatikan, yaitu bagaimana cara merancang sistem yang akan diimplementasikan pada alat. Dalam perancangan sistem perlu dibuat flowchart dari sistem tersebut, seperti gambar 3.11.
BAB 4
IMPLEMENTASI DAN PENGUJIAN
4.1 Implementasi Perancangan Perangkap
Implementasi perancangan perangkap terbagi atas tiga bagian, yaitu konstruksi perangkap, perangkat pendukung, dan hasil akhir alat.
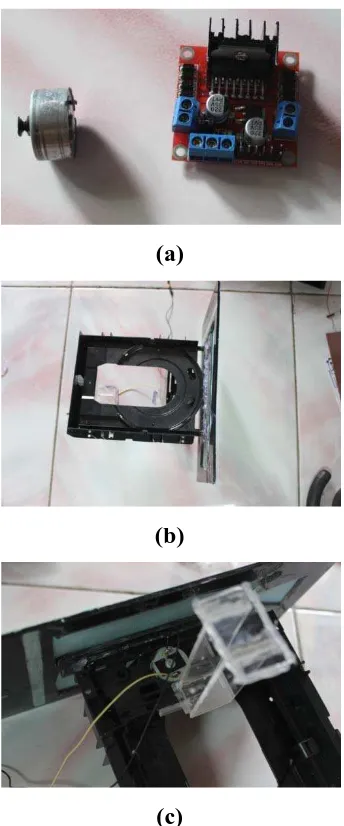
4.1.1 Konstruksi Perangkap
Implementasi konstruksi perangkap terbagi atas empat bagian, yaitu implementasi kerangka badan perangkapt, implementasi penampung perangkap, implementasi dinding geser perangkap, dan implementasi penimbang target.
4.1.1.1. Kerangka Badan Perangkap
Implementasi kerangka badan perangkap menggunakan bahan material acrylic.
Acrylic yang digunakan memiliki ketebalan 3 mm. Alasan penulis menggunakan
material acrylic adalah karena mudah dibentuk, tidak mudah pecah, ringan, dan elastis. Bahan dan peralatan yang digunakan untuk membuat kerangka alat, yaitu gerinda, bor duduk, glue gun, cutter, pipa, baut dan mur.
(b)
(c)
Gambar 4.1 Kerangka Perangkap
4.1.1.2. Penampung Perangkap
Implementasi penampung perangkap menggunakan bahan material acrylic sebagai rangka dan kawat bangunan sebagai dinding, acrylic digunakan karena kuat dan ringan sehingga tidak menambah berat dari perangkap sedangkan kawat digunakan sebagai dinding agar hewan yang terperangkap masih bisa bernafas bebas. Implementasi penampung perangkap dapat dilihat pada gambar 4.2
4.1.1.3. Dinding Geser Perangkap
Implementasi dinding geser perangkap menggunakan modifikasi dari perangkat CD-ROM yang ada pada sebuah CPU di komputer personal. Semua rangkaian elektronik yang ada dicabut dan hanya menyisakan motor DC-nya saja. Bagian tray-nya ditempel plat acrylic sehingga menjadi dinding yang bisa menggeser secara otomatis dengan lebih dahulu diprogram melalui mikrokontroler yang disambungkan dengan driver
L298. Implementasi dinding geser perangkap dapat dilihat pada gambar 4.3 (a, b, c
dan d).
(a)
(b)
(c)
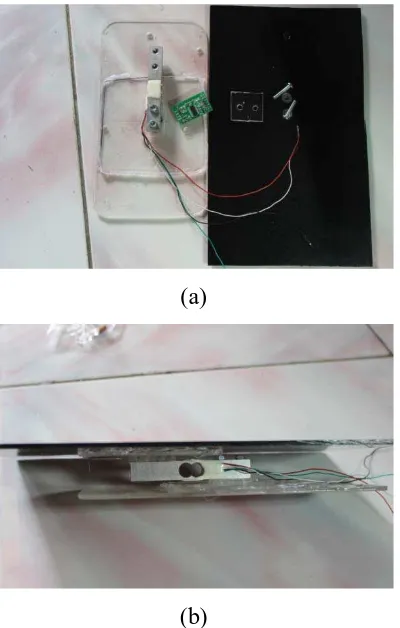
4.1.1.4. Perancangan Penimbang Target
Implementasi perancangan penimbang target dilakukan dengan menggunakan 4 buah papan plat acrylic. Alasan menggunakan acrylic dikarenakan materialnya yang ringan dan lentur sehingga bisa kuat menahan beban dari hewan yang masuk kedalam perangkap. Implementasi perancangan penimbang target dapat dilihat pada gambar 4.4 (gambar a, dan b).
(a)
(b)
Gambar 4.4 Perancangan Penimbang Target
4.1.2. Perangkat Pendukung
Implementasi perangkat pendukung terbagi atas tiga bagian yaitu rangkaian elektronika, mikrokontroler ATMEGA328 Arduino Uno, dan program mikrokontroler arduino.
4.1.2.1 Rangkaian Elektronika Perangkap
rapi, dan kemungkinan komponen terlepas dari papan PCB jarang terjadi dikarenakan sudah menyatu pada papan PCB dengan cara di solder.
Tahapan-tahapan implementasi rangkaian elektronika robot pada papan PCB akan dijelaskan sebagai berikut:
1. Pembuatan layout PCB. Pembuatan layout dilakukan dengan membuat gambar skematik rangkaian dengan menggunakan software Proteus 8 ARES. Skematik rangkaian adalah gambar yang menghubungkan komponen-komponen dalam sebuah rangkaian elektronik. Pembuatan skematik rangkaian dan layout PCB dapat dilihat pada gambar 4.5.
Gambar 4.5 Pembuatan Skematik Rangkaian dan Layout PCB.
Proses pencetakan layout dengan cara mengklik menu output pada form menu bar, klik print. Hilangkan tanda checklist pada top silk dan bottom silk untuk mencetak bagian bawah layout pada PCB. Persiapkan kertas foto pada printer fotokopi selanjutnya klik Ok.
2. Tahapan selanjutnya hasil pencetakan layout PCB menggunakan printer fotokopi pada kertas foto. Hasil pencetakan layout PCB dapat dilihat pada gambar 4.6.
3. Tahap penyablonan pada papan PCB. Pada tahap ini hasil pencetakan layout PCB disablon diatas papan PCB dengan cara permukaan layout gambar diletakkan diatas lapisan kuningan pada papan PCB, kemudian di panaskan menggunakan setrika listrik agar layout menempel pada permukaan kuningan papan PCB.
4. Tahap pelarutan PCB. Tahap pelarutan menggunakan ferri chloride (FeCl3
5. Tahap pengeboran PCB. Pengerboran dilakukan menggunakan mata bor 0,8 mm dan 0,1 mm untuk peletakan komponen yang akan di solder pada papan PCB.
) dengan cara memasukkan papan PCB kedalam larutan ferri chloride hingga kuningan papan PCB yang tidak tertutup oleh gambar layout melebur.
6. Tahap peletakan komponen dan penyolderan komponen. Pada tahap ini semua komponen diletakkan pada papan PCB sesuai lubang peletakan komponen untuk 7. Selanjutnya dilakukan penyolderan dan peletakan komponen. Peletakan komponen
dapat dilihat pada gambar 4.7.
Gambar 4.7. Peletakan Komponen
4.1.2.2 Mikrokontroller Atmega328 Arduino UNO
Mikrokontroler yang dipakai pada alat adalah mikrokontroler atmega328 arduino uno. Pin-pin yang digunakan pada mikrokontroler adalah sebagai berikut.
8. Analog pin1 = DOUT hx711 9. Analog pin2 = Sensor LDR
4.1.2.3 Program Mikrokontroler Arduino
Implementasi program mikrokontroler arduino dibuat menggunakan bahasa pemograman C. Software yang digunakan untuk membuat program adalah editor dan
compiler Arduino. File program berekstensi *.ino file yang sudah dikompilasi akan di
upload kedalam mikrokontroler arduino. Program mikrokontroler arduino dapat
dilihat pada gambar 4.8.
4.1.3. Hasil Akhir Alat
Setelah melakukan semua tahap implementasi maka semua hasilnya disatukan dan dijadikan hasil akhir dari alat yang akan diuji terlebih dahulu dan akhirnya akan siap untuk digunakan. Tampilan akhir dan skema perangkap hewan otomatis dapat dilihat pada gambar 4.9. dan 4.10.
Gambar 4.9 Tampilan Akhir Perangkap Hewan Otomatis
4.2. Pengujian Sistem
Pengujian sistem bertujuan untuk melihat dan memastikan apakah sistem yang dibuat berjalan dengan baik. Pengujian dilakukan dengan cara memasukkan contoh pengganti hewan yang akan menjadi target, apakah sensor sudah sesuai dideteksi sebagai target oleh mikrokontroler arduino, pengujian motor DC, pengujian modul SIM800L dan pengujian tahap akhir komponen.
4.2.1. Pengujian Sensor PIR
Pengujian sensor PIR dilakukan dengan memasukkan/melewatkan benda yang memiliki suhu panas alami seperti pada makhluk hidup melewati sisi depan yang menjadi pendeteksi sensor pada sensor ini. Pengujian berhasil apabila sensor memberikan output yang sesuai. Source code pengujian sensor PIR dapat dilihat pada gambar 4.11.
Gambar4.11 Source Code Uji Panas Tubuh Sensor PIR
Hasil yang didapatkan dari pengujian pir dapat dilihat pada tabeL 4.1. Tabel 4.1 Pengujian Panas Tubuh Sensor PIR
Kondisi PIR Status
Dari tabel tersebut dapat kita simpulkan bahwa sensor bekerja dengan baik karena mendeteksi panas alami (tangan).
4.2.2. Pengujian Sensor LDR
Pengujian sensor LDR dilakukan dengan memasukkan/melewatkan benda apa saja yang bisa menghalangi sinar/cahaya apapun yang menuju ke sensor LDR, sehingga kadar cahaya yang diterima oleh sensor bisa berkurang yang dalam hal ini jumlah nilai sensor menjadi bertambah. Pengujian berhasil apabila sensor memberikan output yang sesuai. Source code pengujian sensor LDR dapat dilihat pada gambar 4.12.
Gambar 4.12 Source Code Uji Kadar Cahaya Sensor LDR
Hasil yang didapatkan dari pengujian LDR dapat dilihat pada tabel 4.2. Tabel 4.2 Pengujian Kadar Cahaya Sensor LDR
Kondisi LDR Serial Monitor
Terhalang 500-1000
Tidak terhalang <200
Dari tabel tersebut dapat kita simpulkan bahwa sensor bekerja dengan baik karena mengalami penambahan jumlah nilai yang signifikan.
4.2.3. Pengujian Sensor Load Cell
tepung, dilakukan beberapa kali agar mendapatkan hasil yang akurat. Source code pengujian sensor Load Cell dapat dilihat pada gambar 4.13.
Gambar 4.13 Source Code Uji Timbang Sensor Load Cell
Hasil yang didapatkan dari pengujian dapat dilihat pada tabel 4.3. Tabel 4.3 Pengujian Timbang Sensor Load Cell
Hasil pengujian dapat membuktikan bahwa sensor Load Cell dapat bekerja dengan baik dengan perbedaan/error jarak rata-rata 2,9 % masih kecil dan bisa ditolerir.
4.2.4. Pengujian Motor DC
Pengujian motor DC berkaitan dengan program yang diberikan ke mikrokontroler arduino. Pengujian motor dikatakan berjalan dengan baik jika pergerakan maju mudur
tray yang telah dimodifikasi sesuai dengan delay yang telah diberikan di program
mikrokontroler. Source code pengujian motor DC dapat dilihat pada gambar 4.14.
Gambar 4.14 Source Code Uji Gerak Motor DC
4.2.5. Pengujian Modul SIM800L
Pengujian modul SIM800L berkaitan dengan program yang diberikan ke mikrokontroler arduino. Pengujian modul dikatakan berjalan dengan baik jika pesan yang dikirimkan oleh modul sampai ke nomor pengguna yang telah ditentukan di program yang di-upload ke mikrokontroler. Source code pengujian modul SIM800L dapat dilihat pada gambar 4.15.
4.2.6. Pengujian Tahap Akhir
Pengujian tahap akhir komponen dilakukan dengan cara menguji seluruh komponen sistem pada perangkap. Pengujian akan memperlihatkan pergerakan dinding geser pada saat objek berada didalam perangkap. Dengan hasil pengujian ini, dapat diperoleh hasil kinerja perangkap dan sistem secara keseluruhan dapat berjalan dengan baik sesuai keinginan user. Aktivitas pengujian tahap akhir dapat dilihat pada gambar 4.16.
Gambar 4.16 Pengujian Tahap Akhir
BAB 5
KESIMPULAN DAN SARAN
5.1 Kesimpulan
Berdasarkan hasil dari yang diperoleh dari implementasi dan pengujian sistem, maka dapat diambil kesimpulan sebagai berikut:
7. Sistem dapat menambah efektivitas waktu dari pengguna dengan meminimalisir kegiatan yang dibutuhkan dengan alat ini.
8. Semua sensor dapat bekerja dengan baik dalam menyampaikan data ke mikrokontroler.
9. Informasi berhasil dikirim ke pengguna dengan menggunakan modul SIM800L. 10.Target berhasil masuk kedalam perangkap dengan baik.
5.2 Saran
Berikut beberapa saran yang penulis berikan untuk pengembangan lebih lanjut dari penelitian ini:
1. Untuk membantu proses kontrol diperlukan peletakan kamera pada ruang penampung yang bisa diakses dari jauh sehingga pengguna tahu kondisi alat dan umpan yang tersisa.
2. Mencari alternatif material lain agar ukuran alat bisa diperkecil sehingga tidak memakan banyak ruang dan bisa diletakkan dimana saja.
BAB 2
LANDASAN TEORI
2.1 Mikrokontroler
Pengendali mikro (microcontroller) adalah sistem mikroprosesor lengkap yang
terkandung didalam sebuah
serbaguna yang digunakan dalam sebuah umumnya juga telah berisi komponen pendukung sistem minimal mikroprosesor, yakni memori dan antarmuka I/O, sedangkan di dalam mikroprosesor umumnya hanya berisi
Berbeda dengan CPU serba-guna, mikrokontroler tidak selalu memerlukan memori eksternal, sehingga mikrokontroler dapat dibuat lebih murah dalam kemasan yang lebih kecil dengan jumlah pin yang lebih sedikit.
Sebuah
a.
kinerja tinggi 64-bit.
b.
c. Antarmuka komunikasi serial lain seperti
Untuk membuat sistem minimal paling tidak dibutuhkan sistem clock dan reset, walaupun pada beberapa mikrokontroler sudah menyediakan sistem clock internal, sehingga tanpa rangkaian eksternal pun mikrokontroler sudah beroperasi.
Mikrokontroler itu sendiri adalah chip atau IC (integrated Circuit) yang bisa diprogram menggunakan komputer. Tujuan menanamkan program pada mikrokontroler adalah agar rangkaian elektronik dapat membaca input, memproses input tersebut dan kemudian menghasilkan output seperti yang diinginkan. Jadi, mikrokontroler bertugas sebagai otak yang mengendalikan input, proses, dan output sebuah rangkaian elektonik (Situmorang, H. 2011).
Mikrokontroler ada pada perangkat elektronik sekeliling kita, misalnya
Handphone, MP3 Player, DVD, Televisi, AC, dll. Mikrokontroler juga dapat
mengendalikan robot, baik robot mainan maupun industri.
2.2 Arduino
Arduino adalah platform pembuatan prototipe elektronik yang bersifat open-source
hardware yang berdasarkan pada perangkat keras dan perangkat lunak yang fleksibel
dan mudah digunakan. Arduino ditujukan bagi para seniman, desainer, dan siapapun yang tertarik dalam menciptakan objek atau lingkungan yang interaktif (Simanjuntak, M.G. 2013).
Proyek arduino berawal di lvre, italia pada tahun 2005. Sekarang telah lebih dari 120.000 unit terjual sampai dengan 2010. Pendirinya adalah Massimo Banzidan David Cuartiellez. Nama Arduino adalah sebuah nama maskulin yang berarti teman yang kuat. Platform arduino terdiri dari arduino board, shield, bahasa pemrograman arduino, dan arduino development environment. Arduino board biasanya memiliki sebuah chip dasar mikrokontroler Atmel AVR ATmega8 berikut turunannya. Blok diagram arduino board yang sudah disederhanakan dapat dilihat pada Gambar 2.1
Shield adalah sebuah papan yang dapat dipasang diatas arduino board untuk
menambah kemampuan dari arduino board.
Gambar 2.1 Blok Diagram Arduino Board. (Sumber:Simanjuntak, M.G. 2013)
Arduino Development Environment adalah perangkat lunak yang digunakan untuk menulis dan meng-compile program untuk arduino. Arduino Development
Environment juga digunakan untuk meng-upload program yang sudah di-compile ke
memori program arduino board.
2.2.1 Arduino Uno
Arduino Uno adalah arduino board yang menggunakan mikrokontroler ATmega328. Arduino Uno memiliki 14 pin digital (6 pin dapat digunakan sebagai output PWM), 6
input analog, sebuah 16 MHz osilator kristal, sebuah koneksi USB, sebuah konektor
sumber tegangan, sebuah header ICSP, dan sebuah tombol reset. Arduino Uno memuat segala hal yang dibutuhkan untuk mendukung sebuah mikrokontroler. Hanya dengan menhubungkannya ke sebuah komputer melalui USB atau memberikan tegangan DC dari baterai atau adaptor AC ke DC sudah dapat membuanya bekerja. Arduino Uno menggunakan ATmega16U 2 yang diprogram sebagai USB-to-serial
converter untuk komunikasi serial ke komputer melalui port USB. Bentuk Arduino
UNO dapat dilihat pada gambar 2.2.
Adapun data teknis board Arduino UNO R3 adalah sebagai berikut: 1. Mikrokontroler : ATmega328
2. Tegangan Operasi : 5V
3. Tegangan Input (recommended) : 7 - 12 V 4. Tegangan Input (limit) : 6-20 V
8. Arus DC untuk pin 3.3 V : 150 mA
9. Flash Memory : 32 KB dengan 0.5 KB digunakan untuk bootloader
10. SRAM : 2 KB 11. EEPROM : 1 KB
12. Kecepatan Pewaktuan : 16 Mhz
Gambar 2.2 Arduino Uno.
(Sumber: Simanjuntak, M.G. 2013)
2.2.2 Pin Masukan Dan Keluaran Arduino Uno
Masing-masing dari 14 pin digital arduino uno dapat digunakan sebagai masukan atau keluaran menggunakan fungsi pinMode(), digitalWrite() dan digitalRead(). Setiap pin beroperasi pada tegangan 5 volt. Setiap pin mampu menerima atau menghasilkan arus maksimum sebasar 40 mA dan memiliki resistor pull-up internal (diputus secara
default) sebesar 20-30 KOhm. Sebagai tambahan, beberapa pin masukan digital
memiliki kegunaan khusus yaitu:
1. Komunikasi serial: pin 0 (RX) dan pin 1 (TX), digunakan untuk menerima (RX) dan mengirim (TX) data secara serial.
2. External Interrupt: pin 2 dan pin 3, pin ini dapat dikonfigurasi untuk memicu
sebuah interrupt pada nilai rendah, sisi naik atau turun, atau pada saat terjadi perubahan nilai.
3. Pulse-width modulation (PWM): pin 3,5,6,9,10 dan 11, menyediakan keluaran
PWM 8-bit dangan menggunakan fungsi analogWrite().
4. Serial Peripheral Interface (SPI): pin 10 (SS), 11 (MOSI), 12 (MISO) dan 13
(SCK), pin ini mendukung komunikasi SPI dengan menggunakan SPI library. 5. LED: pin 13, terdapat built-in LED yang terhubung ke pin digital 13. Ketika pin
Arduino Uno memiliki 6 masukan analog yang diberi label A0 sampai A5, setiap pin menyediakan resolusi sebanyak 10 bit (1024 nilai yang berbeda). Secara default pin mengukur nilai tegangan dari ground (0V) hingga 5V, walaupun begitu dimungkinkan untuk mengganti nilai batas atas dengan menggunakan pin AREF dan fungsi analogReference(). Sebagai tambahan beberapa pin masukan analog memiliki fungsi khusus yaitu pin A4 (SDA) dan pin A5 (SCL) yang digunakan untuk komunikasi Two Wire Interface (TWI) atau Inter Integrated Circuit (I2C) dengan menggunakan Wire library.
2.2.3 Sumber Daya Dan Pin Tegangan Arduino Uno
Arduino uno dapat diberi daya melalui koneksi USB (Universal Serial Bus) atau melalui power supply eksternal. Jika arduino uno dihubungkan ke kedua sumber daya tersebut secara bersamaan maka arduino uno akan memilih salah satu sumber daya secara otomatis untuk digunakan. Power supplay eksternal (yang bukan melalui USB) dapat berasal dari adaptor AC ke DC atau baterai. Adaptor dapat dihubungkan ke soket power pada arduino uno. Jika menggunakan baterai, ujung kabel yang dihubungkan ke baterai dimasukkan kedalam pin GND dan Vin yang berada pada konektor power.
Arduino uno dapat beroperasi pada tegangan 6 sampai 20 Volt. Jika arduino uno diberi tegangan di bawah 7 Volt, maka pin 5V akan menyediakan tegangan di bawah 5 Volt dan arduino uno mungkin bekerja tidak stabil. Jika diberikan tegangan melebihi 12 Volt, penstabil tegangan kemungkinan akan menjadi terlalu panas dan merusak arduino uno. Tegangan rekomendasi yang diberikan ke arduino uno berkisar antara 7 sampai 12 Volt.
Pin-pin tegangan pada arduino uno adalah sebagai berikut:
1. Vin adalah pin untuk mengalirkan sumber tegangan ke arduino uno ketika menggunakan sumber daya eksternal (selain dari koneksi USB atau sumber daya yang teregulasi lainnya). Sumber tegangan juga dapat disediakan melalui pin ini jika sumber daya yang digunakan untuk arduino uno dialirkan melalui soket power. 2. 5V adalah pin yang menyediakan tegangan teregulasi sebesar 5 volt berasal dari
3. 3V3 adalah pin yang meyediakan tegangan teregulasi sebesar 3,3 volt berasal dari regulator tegangan pada arduino uno.
4. GND adalah pin ground.
2.2.4 Memori Program
ATMega328 memiliki 32K byte On-chip In-System Reprogrammable Flash Memory untuk menyimpan program. Memori flash dibagi kedalam dua bagian, yaitu bagian program bootloader dan aplikasi seperti pada Gambar 2.3 Bootloader adalah program kecil yang bekerja pada saat sistem dimulai yang dapat memasukkan seluruh program aplikasi ke dalam memori prosesor (Simanjuntak, M.G. 2013).
Gambar 2.3 Peta Memori Program ATMega 328. (Sumber:Simanjuntak, M.G. 2013)
2.2.5 Memori Data
Peta memori data dari ATMega 328 dapat dilihat pada Gambar 2.4.
Gambar 2.4 Peta Memori Data ATMega 328. (Sumber:Simanjuntak, M.G. 2013)
2.3 Aktuator
Aktuator adalah alat elektronik untuk menggerakkan atau mengontrol gaya gerakan. Jenis-jenis perangkat aktuator (Motor DC, Motor Servo, Motor Stepper).
2.3.1 Motor DC
Motor DC (Direct Current) adalah alat untuk mengubah energi listrik menjadi energi gerak mekanik dan sebaliknya dapat mengubah energi gerak mekanik menjadi energi listrik yang awalnya diperkenalkan oleh Michael Faraday. Salah satu bentuk motor DC dapat dilihat pada gambar 2.6. (Rudiyanto, H.B. 2010).
2.3.2 Driver Motor
Driver motor adalah suatu rangkaian elektronika yang berfungsi untuk mengatur arah
atau kecepatan motor DC berdasarkan keinginan pegguna. Pada sebuah rangkaian
driver motor terdapat IC yang berfungsi sebagai pengatur arus listrik secara dua arah.
IC yang akan dipakai untuk mengendalikan motor DC di alat ini adalah IC L298D.
2.3.2.1 IC (Integarted Circuit) L298D
IC L298 merupakan IC buatan SG5 Thomson Microelectron Inc. yang digunakan untuk mengontrol motor. L298 menggunakan prinsip kerja H-Bridge motor drive. Didalam L298 terdapat dual full bridge sehingga dapat mengontrol 2 motor DC sekaligus dengan kemampuan arah motor bolak-balik (bidirectional).(Rudiyanto, H.B. 2010). Bentuk ICL298D dapat dilihat pada gambar 2.6.
Gambar 2.6 IC L298D (Sumber: Rudiyanto, H.B. 2010)
2.4 Sensor Berat (Load Cell)
Load cell adalah komponen utama pada sistem timbangan digital. Tingkat keakurasian timbangan bergantung dari jenis load cell yang dipakai. Sensor load cell apabila diberi beban pada inti besi maka nilai resistansi di strain gauge-nya akan berubah yang dikeluarkan melalui tiga buah kabel. Dua kabel sebagai eksitasi dan satu kabelnya lagi sebagai sinyal keluaran ke kontrolnya. Sebuah load cell terdiri dari konduktor, strain
gauge, dan wheatstone bridge. (Piskorowski et.al., 2008). Bentuk sensor Load Cell
Gambar 2.7 Sensor Berat ( Load Cell ) (Sumber : Piskorowski et.al., 2008)
Load Cell memiliki respon osilasi yang membutuhkan waktu untuk menetap terlebih dahulu sebelum digunakan. Pengukuran dinamis mengacu pada penentuan nilai akhir dari sinyal sensor sedangkan outputnya masih dalam osilasi. Oleh karena itu, Menentukan nilai dari ukur dalam waktu tercepat mungkin sangat diperlukan untuk mempercepat proses pengukuran, yang mana sangat penting terutama dalam beberapa penggunaan. Salah satu contoh pengolahan yang dapat dilakukan pada sinyal output sensor adalah pengkalibrasian untuk mencapai koreksi respon yang paling akurat (Piskorowski et.al., 2008).
2.4.1 Driver HX711
Hx711 adalah modul timbangan, yang memiliki prinsip kerja mengkonversi perubahan yang terukur dalam perubahan resistansi dan mengkonversinya ke dalam besaran tegangan melalui rangkaian yang ada. Modul ini memiliki struktur yang sederhana, mudah dalam penggunaan, hasil yang stabil dan reliable, memiliki sensitivitas tinggi, dan mampu mengukur perubahan dengan cepat (Priyadi, D. 2015). Bentuk modul HX711 dapat dilihat pada gambar 2.8.
2.5 Sensor Passive Infra Red (PIR)
PIR merupakan sebuah sensor berbasis infrared. Akan tetapi, tidak seperti sensor infrared kebanyakan yang terdiri dari IR LED dan fototransistor. PIR tidak memancarkan apapun seperti IR LED. Sesuai namanya “Passive”, sensor ini hanya merespon energi dari pancaran sinar inframerah pasif yang dimiliki oleh setiap benda yang terdeteksi olehnya. Benda yang dapat dideteksi oleh sensor ini biasanya adalah tubuh manusia (Rahmalia, D.R et al., 2012).
PIR sensor mempunyai dua elemen sensing yang terhubungkan dengan masukan dengan susunan seperti yang terdapat dalam Gambar 2.9 :
Gambar 2.9 Diagram Internal Rangkaian sensor PIR (sumber : Rahmalia, D.R et al., 2012)
Gambar 2.10 Arah Jangkauan Gelombang Sensor PIR (sumber : Rahmalia, D.R et al., 2012)
Benda yang dapat memancarkan panas berarti memancarkan radiasi infra merah. Benda – benda ini termasuk makhluk hidup seperti binatang dan tubuh manusia. Tubuh manusia dan binatang dapat memancarkan radiasi infra merah terkuat yaitu pada panjang gelombang 9,4 μm. Radiasi infra merah yang dipancarkan inilah yang menjadi sumber pendeteksian bagi detektor panas yang memanfaatkan radiasi infra merah. Modul sensor PIR memiliki karakterisasi sebagai berikut :
a. Tegangan Catu Daya : 4.7 – 12 VDC
b. Jangkauan Deteksi Sensor : 5 meter pada sudut 0 derajat c. Output sensor tegangan High : 5 VDC
d. Output lebar pulsa : 0.5 s
2.6 Light Dependent Resistor (LDR)
LDR atau light Dependent Resistor adalah salah satu jenis resistor yang nilai hambatannya dipengaruhi oleh cahaya yang diterima olehnya. Besarnya nilai hambatan pada LDR tergantung pada besar kecilnya cahaya yang diterima oleh LDR itu sendiri. Contoh penggunaannya adalah pada lampu taman dan lampu di jalan yang bisa menyala di malam hari dan padam di siang hari secara otomatis (Supatmi, S. 2010). Bentuk sensor LDR dapat dilihat pada gambar 2.11.
Gambar 2.11 Sensor LDR dan simbolnya (Sumber: Supatmi, S. 2010)
LDR adalah suatu bentuk komponen yang mempunyai perubahan resistansi yang besarnya tergantung pada cahaya. Karakteristik LDR terdiri dari dua macam yaitu Laju Recovery dan Respon Spektral:
a.Laju Recovery Bila sebuah LDR dibawa dari suatu ruangan dengan level kekuatan cahaya tertentu ke dalam suatu ruangan yang gelap, maka bisa kita amati bahwa nilai resistansi dari LDR tidak akan segera berubah resistansinya pada keadaan ruangan gelap tersebut. Namun LDR tersebut hanya akan bisa mencapai harga di kegelapan setelah mengalami selang waktu tertentu. Laju recovery merupakan suatu ukuran praktis dan suatu kenaikan nilai resistansi dalam waktu tertentu. Harga ini ditulis dalam K/detik, untuk LDR tipe arus harganya lebih besar dari 200K/ detik(selama 20 menit pertama mulai dari level cahaya 100 lux), kecepatan tersebut akan lebih tinggi pada arah sebaliknya, yaitu pindah dari tempat gelap ke tempat terang yang memerlukan waktu kurang dari 10 ms untuk mencapai resistansi yang sesuai dengan level cahaya 400 lux.
b.Respon Spektral LDR tidak mempunyai sensitivitas yang sama untuk setiap panjang gelombang cahaya yang jatuh padanya (yaitu warna). Bahan yang biasa digunakan sebagai penghantar arus listrik yaitu tembaga, aluminium, baja, emas dan perak. Dari kelima bahan tersebut tembaga merupakan penghantar yang paling banyak, digunakan karena mempunyai daya hantar yang baik
Resistansi LDR akan berubah seiring dengan perubahan intensitas cahaya yang mengenainya atau yang ada disekitarnya. Dalam keadaan gelap resistansi LDR sekitar
10MΩ dan dalam keadaan terang sebesar 1KΩ atau kurang. LDR terbuat dari bahan
jatuh menyebabkan lebih banyak muatan yang dilepas atau arus listrik meningkat. Artinya resistansi bahan telah mengalami penurunan.
2.7LED (Light Emitting Diode)
Light Emmiting Dioda atau lebih dikenal dengan sebutan LED (light-emitting diode)
adalah suatu semikonduktor yang memancarkan cahaya monokromatik yang tidak koheren ketika diberi tegangan maju. Gejala ini termasuk bentuk elektroluminesensi. Warna yang dihasilkan bergantung pada bahan semikonduktor yang dipakai, dan bisa juga dekat ultraviolet, tampak, atau inframerah (Dewi, S.K. 2013).
LED juga disebut "Solid State Lighting" karena chip LED disolder ke Printed
Circuit Board (PCB) dan oleh karena itu tidak memiliki filamen seperti bola lampu
pijar, atau zat beracun seperti gas merkuri pada Lampu Hemat Energy (LHE) (Dewi, S.K. 2013). Bentuk LED dapat dilihat pada gambar 2.12.
Gambar 2.12 Lampu LED (Sumber: Dewi, S.K. 2013)
LED dulu umumnya digunakan pada gadget seperti ponsel serta komputer. Sebagai pesaing lampu bohlam dan neon, saat ini aplikasinya mulai terus meluas dan bahkan bisa kita temukan pada korek api yang kita gunakan, lampu emergency dan sebagainya. LED sebagai model almpu masa depan dianggap dapat menekan pemanasan global karena efesiensinya (Dewi, S.K. 2013).
2.8 Modul SIM800L
SIM800L adalah sebuah modul GSM/GPRS produk dari SIMCOM (Shanghai, China) yang bekerja di frekuensi 850-1900 Mhz yang memiliki beberapa fitur unggulan diantaranya GPRS multislot class 12, mendukung kode GPRS CS-1 s.d CS-4 memiliki pin GPIO (General Purpose Input Output), ADC (Analog to Digital
Converter 10 bit, PWM (Pulse With Modulation), radio FM. Dan masih banyak yang
lainnya. Salah satu implementasi modem SIM800 ini adalah membuat SMS controller sebuah pengendali alat elektronik berbasis SMS. Bentuk modul SIM800L dapat dilihat pada gambar 2.13.
Gambar 2.13 Modul SIM800L
(Sumber: http://www.simcom.com/SIM800L)
GPRS modul berdasarkan SIM800L, mendukung quad-band / GPRS jaringan GSM, tersedia untuk GPRS dan pesan SMS transmisi data jarak jauh. Modul GSM dapat digunakan dengan terhubung langsung ke mikrokontroler melalui port serial TTL-nya. Tidak perlu MAX232. Daya pada modul boot secara otomatis mencari jaringan. Onboard lampu sinyal (dengan sinyal lampu kilat perlahan, tidak ada sinyal lampu kilat cepat). (Cruz, E.M.C. et al. 2015)
2.9Pernyataan IF-ELSE
diekspresikan dalam tanda kurung yang benar (Suprapto. 2008). Diagram alur pernyataan IF dapat dilihat pada gambar 2.14.
Gambar 2.14 Diagram Alur Pernyataan IF (Sumber: Suprapto. 2008)
Statement IF juga dapat ditambahkan ELSE sebagai konsekuensi alternatif jika kondisi tidak dipenuhi (FALSE). Untuk lebih jelasnya perhatikan sintaks program pada gambar 2.15.
Gambar 2.15 Sintaks Pernyataan IF-ELSE (Sumber : Suprapto. 2008)
2.10 Proteus 8
Proteus 8 adalah sebuah software simulasi versi ke 8 dari proteus yang mengkombinasikan program ISIS (Intelligent Schematic Input System) untuk membuat sebuah skematik rangkaian elektronika dan program ARES untuk membuat sebuah layout PCB. Software ini bagus untuk mempelajari dasar-dasar elektronika dan sekaligus dapat melakukan simulasi elektronika.
Fitur-fitur dari PROTEUS adalah sebagai berikut :
1. Memiliki kemampuan untuk mensimulasikan hasil rancangan baik digital maupun analog maupun gabungan keduanya,
2. Mendukung simulasi yang menarik dan simulasi secara grafis
3. Mendukung simulasi berbagai jenis microcontroller seperti PIC, 8051 series. 4. Memiliki model-model peripheral yang interactive seperti LED, tampilan LCD,
RS232, dan berbagai jenis library lainnya.
5. Mendukung instrument-instrument virtual seperti voltmeter, amperemeter,
oscciloscope, logic analyser, dll,
6. Memiliki kemampuan menampilkan berbagi jenis analisis secara grafis seperti
transient, frekuensi, noise, distorsi, AC dan DC, dll.
7. Mendukung berbagai jenis komponen-komponen analog, Mendukung open
architecture sehingga kita bisa memasukkan program seperti C++ untuk
keperluan simulasi,
8. Mendukung pembuatan PCB yang di-update secara langsung dari program ISIS ke program pembuat PCB-ARES.
2.10.1 Proteus ISIS (Intelligent Schematic Input System)
Gambar 2.16 Software Proteus ISIS.
2.10.2 Proteus ARES
Proteus ARES merupakan tempat untuk membuat layout PCB berdasarkan skematik rangkaian elektronika yang telah dibuat di ISIS. Software Proteus ARES dapat dilihat pada gambar 2.14.
Gambar 2.17 Software Proteus ARES.
2.11 Arduino Development Environment
Arduino Development Environment adalah sebuah perangkat lunak yang memudahkan kita mengembangkan aplikasi mikrokontroler mulai dari menuliskan
source program, kompilasi, upload hasil kompilasi, dan uji coba secara terminal
Gambar 2.18 Software IDE Arduino
Arduino Development Environment terdiri dari editor teks untuk menulis kode, sebuah area pesan, sebuah konsol, sebuah toolbar dengan tombol-tombol untuk fungsi yang umum dan beberapa menu. Arduino Development Environmentterhubung ke arduino board untuk meng-upload program dan juga untuk berkomunikasi dengan arduino board.
2.12 Hewan Pengerat
Hewan pengerat adalah salah satu
latin Rodentia. Hewan pengerat telah digunakan manusia sebagai diambil kulitnya, untuk makanan, dan juga untuk mendeteksi sampai 3000 spesies binatang pengerat yang ditemukan di semua benua
kecuali
Hewan pengerat yang dimaksud di skripsi ini adalah hewan pengerat yang biasanya menjadi hama pertanian dan hama rumah tangga, seperti tikus dan tupai. Jenis hewan ini menjadi target pada alat perangkap hewan yang dibuat pada penelitian,
BAB 1 PENDAHULUAN
1.1 Latar Belakang
Dewasa ini, perkembangan dunia teknologi telah memberi kemajuan yang sangat pesat, Hal ini dapat dilihat dari banyaknya orang yang menggunakan teknologi terbarukan yang dapat membantu pengguna dalam menyelesaikan pekerjaan mereka. Bidang-bidang yang telah menggunakan teknologi dalam penyempurnaan pekerjaannya sudah cukup banyak, seperti pertanian, industri, kedokteran, pendidikan, rumah tangga, dan lain-lain. Contoh yang dapat diambil adalah di bidang pertanian yakni melakukan pembajakan sawah traktor yang tentunya sangat membantu meringankan tenaga petani. Para petani mulai beralih menggunakan teknologi yang tentunya sangat membantu mengurangi tenaga dan waktu yang digunakan dalam mengontrol tanaman mereka, meningkatkan hasil panen dan memperoleh keuntungan yang jauh lebih besar karena sudah ada efisiensi yang dilakukan dengan adanya teknologi.
Contoh lain dalam penggunaan teknologi adalah pengontrolan hama. Hama merupakan hal yang sangat merugikan bagi petani karena bisa merusak tanaman, maka mau tidak mau para petani harus mengontrol dan memeriksa tanaman mereka agar selalu jauh dari hama. Jika menggunakan cara manual dengan memeriksa setiap meter dari kebun mereka tentu akan sangat memerlukan energi dan waktu. Karena itu diperlukan suatu solusi dalam pengontrolan hama. Salah satu solusinya adalah menggunakan perangkap yang menangkap hama tersebut secara satu persatu atau pun kelompok.
Pada perangkap yang ingin dibuat oleh penulis, ada beberapa kelebihan tambahan yang bisa menambah kinerja dari perangkat perangkap tersebut yaitu kontrol jarak jauh, dan memberi informasi ada atau tidaknya hama yang masuk. Dengan alat ini pekerjaan tersebut akan dapat dikerjakan dengan mudah oleh manusia.
Perangkap ini dirancang agar dapat memberikan informasi mengenai berhasil atau tidaknya hewan masuk kedalam alat yang telah melewati beberapa sensor sebagai pendeteksi situasi. Saat perangkap sedang bekerja dan menangkap hasil, maka informasi akan dikirim dari modul arduino ke handphone pengguna, sehingga pengguna tahu bahwasannya perangkap berhasil bekerja, dan pengguna pun tahu berapa jumlah hasil tangkapan dengan mudah. Maka dari itu penulis memilih judul Perancangan Sistem Perangkap Hewan Pengerat Otomatis Menggunakan Modul Mikrokontroler Arduino.
1.2Rumusan Masalah
Dengan didasari hal-hal yang menjadi latar belakang seperti sebelumnya, penulis menyimpulkan beberapa hal yang menjadi masalah utama, yaitu:
1. Dapatkah sistem yang dibuat memberi efektifitas waktu dari para pengguna?
2. Bisakah semua sensor bekerja secara bersamaan dan mengitimkan data yang benar ke mikrokontroler Arduino Uno?
3. Apakah informasi sampai kepengguna yang handphone-nya telah dihubungkan? 4. Apakah hewan pengerat bisa masuk kedalam perangkap dan perangkap bekerja
dengan baik?
1.3Batasan Masalah
Adapun batasan-batasan dalam penelitian skripsi ini, yaitu:
1. Perangkap ini menggunakan sensor berat load cell, sensor gerak PIR, dan sensor cahaya LDR.
2. Hewan yang dimaksud disini adalah hewan sejenis hama seperti tikus, tupai, dan lainnya yang seukuran.
3. Mikrokontroler yang dipakai adalah Modul Mikrokontroler Arduino. 4. Bahasa pemrograman yang digunakan adalah bahasa C dan IDE Arduino.
1.4Tujuan Penelitian
Tujuan dari penelitian ini adalah membangun suatu alat yang bisa memberikan kemudahan dalam menangkap hama secara otomatis. Selain itu, pengguna tidak perlu repot melakukan kontrol dalam jangka waktu tertentu. Sehingga dapat menghemat waktu agar bisa mengerjakan pekerjaan lainnya.
1.5Manfaat Penelitian
Adapun manfaat dari penelitian ini adalah :
1. Membantu dan mempermudah pekerjaan pengguna dalam pengontrolan hama hewan
2. Untuk menghemat waktu dan tenaga manusia yang dipakai dalam melakukan kontrol terhadap hama dibandngkan dengan cara yang manual.
1.6Metodologi Penelitian
Metodologi penelitian yang dipakai untuk penulisan skripsi ini adalah: 1. Studi literature
Pada metode ini penulis melakukan peninjauan terhadap buku-buku, artikel, jurnal, skripsi penelitian terdahulu sebagai referensi untuk mendapatkan informasi tentang pembuatan alat.
2. Analisis dan Perancangan Sistem
Analisis bertujuan untuk menganalisa setiap informasi dan masalah yang didapat dari studi literatur untuk mencari solusi terbaik dan membuat perancangan program, model rangkaian, flowchart, perancangan aplikasi, dan rangkaian mekanika untuk alat.
3. Implementasi
Untuk implementasinya penulis menggunakan alat yang sudah dirancang penulis sendiri.
4. Pengujian
5. Dokumentasi
Kesimpulan dan hasil dari penelitian ini akan didokumentasikan dalam bentuk karya ilmiah.
1.7Sistematika Penulisan
Sistematika penulisan Skripsi ini dibuat dalam lima bab, yaitu: BAB 1 PENDAHULUAN
Bab ini membahas tentang latar belakang masalah, rumusan masalah, batasan masalah, tujuan penelitian, manfaat penelitian, metodologi penelitian, dan sistematika penelitian skripsi.
BAB 2 LANDASAN TEORI
Bab ini membahas tentang landasan teori tentang Mikrokontroler, arduino, aktuator,
driver motor, modul SIM800L, pernyataan IF-ELSE, sensor berat Loadcell, sensor
gerak PIR, dan sensor cahaya LDR.
BAB 3 ANALISIS DAN PERANCANGAN SISTEM
Bab ini membahas tentang analisis dan perancangan sistem prototipe perangkap hewan otomatis berbasis mikrokontroler arduino dengan menggunakan fungsi IF-ELSE. Dan juga membahas tentang komponen yang digunakan untuk membuat alat, blok diagram alat, perancangan rangkaian dari masing masing komponen dan keseluruhan, desain dan tata letak komponen di PCB, flowchart, dan perangkat lunak alat.
BAB 4 IMPLEMENTASI DAN PENGUJIAN
BAB 5 KESIMPULAN DAN SARAN
ABSTRAK
Perkembangan dunia teknologi memberi kemajuan yang sangat pesat, Hal ini dapat dilihat dari banyaknya orang yang menggunakan teknologi terbarukan yang dapat membantu pengguna dalam menyelesaikan pekerjaan mereka. Penerapan teknologi itu sendiri bisa dilakukan di mana saja termasuk di bidang pertanian, pengontrolan hama. Penggunaan alat manual yang umumnya langsung membyunuh hewan tersebut masih penulis rasa kurang efektif untuk digunakan Skripsi ini bertujuan untuk membuat sebuah prototipe perangkap hewan pengerat (hama) berbasis mikrokontroler Arduino Uno. Diharapkan alat ini dapat digunakan untuk membantu pengguna, sehingga bisa menghemat waktu dan efisiensi tenaga yang digunakan. Perancangan alat ini menggunakian metodologi pengujian terhadap sensor-sensor yang digunakan dan pemrograman dengan fungsi IF-ELSE. Perangkap ini dirancang agar dapat memberikan informasi kepada pengguna bahwa hewan telah masuk kedalam alat yang telah melewati beberapa sensor sebagai pendeteksi situasi. Sinyal informasi akan dikirim dari mikrokontroler arduino ke perangkat yang telah terhubung. Saat perangkap sedang bekerja dan menangkap hasil, maka informasi akan dikirim dari modul arduino keperangkat yang telah ditentukan (handphone pengguna), sehingga user tahu bahwasannya perangkap berhasil bekerja, dan user pun tahu berapa jumlah hasil tangkapan dengan mudah.
AUTOMATIC RODENT ANIMAL TRAP SYSTEM DESIGN USING MICROCONTROLLER ARDUINO MODULE
ABSTRACT
The development of technologies gave a very rapid progress. It can be seen from the
number of people using renewable technologies that can helps users in completing
their work. Application of the technology itself can be done anywhere, including in
agriculture, pest control. The use of manual tools are generally directly kills the target,
authors think they still lack effective to use. This thesis aims to create a prototype of
rodent traps (pest) microcontroller-based Arduino Uno. It is expected this tool can be
used to assist users, so they can save time and energy use efficiency. The design of
this tool used testing methodology to that used sensors and programming with
IF-ELSE function. The trap is designed to provide information to the user that the animal
had entered into a tool that has passed through several sensor as a detector of the
situation. Information signal will be sent from the microcontroller arduino to a device
that has been connected. When the trap was working and capture the results, then the
information will be sent from the module arduino keperangkat predetermined (mobile
users), so the user knows that the trap is successfully work, and the user knows how
many catches with ease.
PERANCANGAN SISTEM PERANGKAP HEWAN PENGERAT
OTOMATIS MENGGUNAKAN MODUL
MIKROKONTROLER ARDUINO
SKRIPSI
FADLI DWIANTO
141421065
PROGRAM STUDI EKSTENSI S1 ILMU KOMPUTER
FAKULTAS ILMU KOMPUTER DAN TEKNOLOGI INFORMASI
UNIVERSITAS SUMATERA UTARA
MEDAN
PERANCANGAN SISTEM PERANGKAP HEWAN
PENGERAT OTOMATIS MENGGUNAKAN
MODUL MIKROKONTROLER ARDUINO
SKRIPSI
Diajukan untuk melengkapi tugas dan memenuhi syarat memperoleh ijazah Sarjana Ilmu Komputer
FADLI DWIANTO
141421065
PROGRAM STUDI EKSTENSI S1 ILMU KOMPUTER
FAKULTAS ILMU KOMPUTER DAN TEKNOLOGI INFORMASI
UNIVERSITAS SUMATERA UTARA
PERSETUJUAN
Judul : PERANCANGAN SISTEM PERANGKAP HEWAN
PENGERAT OTOMATIS MENGGUNAKAN
MODUL MIKROKONTROLER ARDUINO
Kategori : SKRIPSI
Nama : FADLI DWIANTO
Nomor Induk Mahasiswa : 141421065
Program Studi : EKSTENSI S1 ILMU KOMPUTER
Fakultas : ILMU KOMPUTER DAN TEKNOLOGI INFORMASI
UNIVERSITAS SUMATERA UTARA
Diluluskan di
Medan, April 2017
Komisi Pembimbing :
Pembimbing 2 Pembimbing 1
Seniman, S.Kom.,M.Kom. Dr. Poltak Sihombing, M.Kom
NIP. 198705252014041 001 NIP. 196203171991031001
Diketahui/disetujui oleh
Program Studi Ekstensi Ilmu Komputer Ketua,
PERNYATAAN
PERANCANGAN SISTEM PERANGKAP HEWAN PENGERAT OTOMATIS
MENGGUNAKAN MODUL MIKROKONTROLER ARDUINO
SKRIPSI
Saya menyatakan bahwa skripsi ini adalah hasil kerja saya sendiri, kecuali beberapa kutipan dan ringkasan yang masing-masing telah disebutkan sumbernya.
Medan, April 2017
PENGHARGAAN
Alhamdulillahirrabbil’alamin,
Puji dan syukur penulis panjatkan kehadirat Allah SWT yang telah melimpahkan rahmat dan karunia-Nya kepada penulis serta tidak lupa, shalawat dan salam penulis ucapkan juga kepada baginda Rasulullah Muhammad Shallallahu’alaihi Wa-Sallam. sehingga penulis dapat menyelesaikan skripsi ini, sebagai syarat untuk memperoleh gelar Sarjana Komputer di Fakultas Ilmu Komputer dan Teknologi Informasi Universitas Sumatera Utara.
Penulis mengucapkan banyak terimakasih kepada semua pihak yang telah membantu penulis untuk menyelesaikan skripsi. Penulis ingin mengucapkan terimakasih kepada:
1. Bapak Prof. Dr. Runtung Sitepu, SH, M.Hum sebagai rektor Universitas Sumatera Utara.
2. Bapak Prof. Dr. Opim Salim Sitompul, M.Sc. sebagai Dekan Fakultas Ilmu Komputer dan Teknologi Informasi Universitas Sumatera Utara.
3. Bapak Dr.Poltak Sihombing, M.Kom sebagai Ketua Program Studi S1 Ilmu Komputer Fakultas Ilmu Komputer dan Teknologi Informasi Universitas Sumatera Utara dan segaligus sebagai Dosen Pembimbing I.
4. Bapak Heeriyance, ST., M.kom., sebagai Sekertaris Program Studi S1 Ilmu Komputer Fakultas Ilmu Komputer dan Teknologi Informasi Universitas Sumatera Utara.
5. Bapak Seniman, S.Kom.,M.Kom selaku Dosen Pembimbing II yang telah memberikan arahan dan masukan kepada penulis dalam pengerjaan skripsi ini. 6. Bapak Prof. Dr. Iryanto, M.Si. dan Bapak Sajadin Sembiring, S.Si.,M.Comp.,Sc
sebagai Dosen Penguji yang telah memberikan saran dan masukan kepada penulis dalam penyempurnaan skripsi ini.
7. Seluruh Dosen dan Staf Pegawai di Program Studi S1 Ilmu Komputer Fakultas Ilmu Komputer dan Teknologi Informasi Universitas Sumatera Utara.
Muhammad Fauzan yang telah memberikan do’a, dukungan serta perhatian yang tulus kepada penulis agar dapat menyelesaikan skripsi ini.
9. Teman-teman mahasiswa ekstensi Ilmu Komputer stambuk 2014, yang telah memberikan motovasi dan arahan kepada penulis.
10.Semua pihak yang terlibat yang tidak dapat penulis ucapkan satu persatu yang telah membantu penulis menyelesaikan skripsi ini.
Penulis menyadari bawa skripsi ini masih jauh dari kata sempurna, karna kesempurnaan hanya milik Allah SWT. Oleh karena itu penulis menerima seluruh kritik dan saran yang diberikan untuk menyempurnakan skripsi ini. Penulis berharap semoga skripsi ini bermanfaat bagi penulis sendiri dan khususnya para pembaca pada umumnya.
Medan, April 2017
ABSTRAK
Perkembangan dunia teknologi memberi kemajuan yang sangat pesat, Hal ini dapat dilihat dari banyaknya orang yang menggunakan teknologi terbarukan yang dapat membantu pengguna dalam menyelesaikan pekerjaan mereka. Penerapan teknologi itu sendiri bisa dilakukan di mana saja termasuk di bidang pertanian, pengontrolan hama. Penggunaan alat manual yang umumnya langsung membyunuh hewan tersebut masih penulis rasa kurang efektif untuk digunakan Skripsi ini bertujuan untuk membuat sebuah prototipe perangkap hewan pengerat (hama) berbasis mikrokontroler Arduino Uno. Diharapkan alat ini dapat digunakan untuk membantu pengguna, sehingga bisa menghemat waktu dan efisiensi tenaga yang digunakan. Perancangan alat ini menggunakian metodologi pengujian terhadap sensor-sensor yang digunakan dan pemrograman dengan fungsi IF-ELSE. Perangkap ini dirancang agar dapat memberikan informasi kepada pengguna bahwa hewan telah masuk kedalam alat yang telah melewati beberapa sensor sebagai pendeteksi situasi. Sinyal informasi akan dikirim dari mikrokontroler arduino ke perangkat yang telah terhubung. Saat perangkap sedang bekerja dan menangkap hasil, maka informasi akan dikirim dari modul arduino keperangkat yang telah ditentukan (handphone pengguna), sehingga user tahu bahwasannya perangkap berhasil bekerja, dan user pun tahu berapa jumlah hasil tangkapan dengan mudah.
AUTOMATIC RODENT ANIMAL TRAP SYSTEM DESIGN USING MICROCONTROLLER ARDUINO MODULE
ABSTRACT
The development of technologies gave a very rapid progress. It can be seen from the
number of people using renewable technologies that can helps users in completing
their work. Application of the technology itself can be done anywhere, including in
agriculture, pest control. The use of manual tools are generally directly kills the target,
authors think they still lack effective to use. This thesis aims to create a prototype of
rodent traps (pest) microcontroller-based Arduino Uno. It is expected this tool can be
used to assist users, so they can save time and energy use efficiency. The design of
this tool used testing methodology to that used sensors and programming with
IF-ELSE function. The trap is designed to provide information to the user that the animal
had entered into a tool that has passed through several sensor as a detector of the
situation. Information signal will be sent from the microcontroller arduino to a device
that has been connected. When the trap was working and capture the results, then the
information will be sent from the module arduino keperangkat predetermined (mobile
users), so the user knows that the trap is successfully work, and the user knows how
many catches with ease.
DAFTAR ISI
2.3.2.1IC (Integrated Circuit) L298D 13
2.4 Sensor Berat Load Cell 13
2.4.1 Driver HX711 14
2.5 Sensor Passive Infra Red (PIR) 15
2.6 Sensor Light Dependent Resistor (LDR) 16
2.7 Light Emitting Diode (LED) 18
2.10 Proteus 8 21 2.10.1 Proteus ISIS (Intelligent Sgchematic Input System) 21
2.10.2 Proteus ARES 22
2.11 Arduino Development Enviroment 22
2.12 Hewan Pengerat 23
BAB 3 ANALISIS DAN PERANCANGAN SISTEM 24
3.1 Analisis Sistem 24
3.1.1. Analisis Masalah 24
3.1.2. Analisis Kebutuhan (Requirement Analyst) 25
3.1.2.1. Analisis Fungsional 25
3.1.2.2. Analisis Nonfungsional 25
3.2 Perancangan Sistem 25
3.2.1 Diagram Ishikawa 25
3.2.2 Blok Diagram 26
3.2.3 Penentuan Komponen Perangkap Otomatis 27
3.2.4 Rangkaian Sensor PIR 28
3.2.5 Rangkaian Sensor LDR 29
3.2.6 Rngakaian Sensor Loadcell dan Driver HX711 29 3.2.7 Rangkaian Motor DC dengan Driver L298 30
3.2.8 Rangkaian Modul SIM800L 30
3.2.9 Rangka ian Sirkuit Utama 31
3.2.10 Perancangan PCB (Printed Circuit Board) 32
3.2.11 Flowchart 33
BAB 4 IMPLEMENTASI DAN PENGUJIAN 35
4.1 Implementasi Perancangan Perangkap 35
4.1.1. Konstruksi Perangkap 35
4.1.1.2. Kerangka Badan Perangkap 35
4.1.1.3. Penampung Perangkap 36
4.1.1.4. Dinding Geser Perangkap 37
4.1.1.5. Perancangan Penimbang Target 38
4.1.2. Perangkat Pendukung 38
4.1.2.2. Rangkaian Elektronika Perangkap 38 4.1.2.3. Mikrokontroler ATMEGA328 Arduino UNO 40 4.1.2.4. Program Mikrokontroler Arduino 41
4.1.3. Hasil Akhir Alat 42
4.2 Pengujian Sistem 43
4.2.1 Pengujian Sensor PIR 43
4.2.2 Pengujian Sensor LDR 44
4.2.3 Pengujian Sensor Load Cell 44
4.2.6 Pengujian Tahap Akhir 47
BAB 5 KESIMPULAN DAN SARAN 48
5.1 Kesimpulan 48
5.2 Saran 48
DAFTAR TABEL
Halaman
Tabel 3.1 Tabel Peralatan 27
Tabel 3.2 Tabel Komponen Fisik 28
Tabel 3.3 Tabel Komponen Elektronik 28
Tabel 4.1 Pengujian Sensor PIR 43
Tabel 4.2 Pengujian Sensor LDR 44
Tabel 4.3 Pengujian Sensor Load Cell 45
DAFTAR GAMBAR
Gambar 2.9 Diagram Internal Rangkaian Sensor PIR 15 Gambar 2.10 Arah Jangkauan Gelombang Sensor PIR 16
Gambar 2.11 Sensor LDR dan Simbolnya 17
Gambar 2.12 Lampu LED 18
Gambar 2.13 Modul SIM800L 19
Gambar 2.14 Diagram Alur Pernyataan IF 20
Gambar 2.15 Sintaks Pernyataan IF-ELSE 20
Gambar 2.16 Software Proteus ISIS 22
Gambar 3.5 Rangkaian Sensor Loadcell 29
Gambar 3.6 Rangkaian Motor DC dengan Driver L298 30
Gambar 3.7 Rangkaian Modul SIM800L 30
Gambar 3.8 Rangka ian Sirkuit Utama 31
Gambar 3.9 Tata Letak Jalur PCB 32
Gambar 3.10 Tata Letak Komponen PCB 32
Gambar 3.11 Flowchart Perangkap Hewan Otomatis Menggunakan
Mikrokontroler Arduino 33
Gambar 4.1 Kerangka Perangkap 36
Gambar 4.2 Penampung Perangkap 36
Gambar 4.3 Dinding Geser Perangkap 37
Gambar 4.4 Perancangan Penimbang Target 38
Gambar 4.5 Pembuatan Skematik Rangkaian dan Layout PCB 39
Gambar 4.8 Editor dan Compiler Arduino 41 Gambar 4.9 Tampilan Akhir Perangkap Hewan Otomatis 42
Gambar 4.10 Skema Perangkap Hewan Otomatis 42
Gambar 4.11 Source Code Sensor PIR 43
Gambar 4.12 Source Code Sensor LDR 44
Gambar 4.13 Source Code Sensor Load Cell 45
Gambar 4.14 Source Code Sensor Motor DC 46
Gambar 4.15 Source Code Sensor Modul SIM800L 46