MENGGUNAKAN SENSOR LDR BERBASIS
MIKROKONTROLER AT MEGA 8
TUGAS AKHIR
ANDRIANI NIRWANA BARUS
112411007
PROGRAM STUDI D-3 METROLOGI DAN INSTRUMENTASI DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATERA UTARA
ALAT UKUR INTENSITAS CAHAYA DENGAN
MENGGUNAKAN SENSOR LDR BERBASIS
MIKROKONTROLER AT MEGA 8
TUGAS AKHIR
Diajukan untuk melengkapi tugas dan memenuhi syarat memperoleh Ahli Madya
ANDRIANI NIRWANA BARUS
112411007
PROGRAM STUDI D-3 METROLOGI DAN INSTRUMENTASI DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATERA UTARA
PERSETUJUAN
Judul : Alat Ukur Intensitas Cahaya Dengan
Menggunakan Sensor LDR Berbasis Mikrokontroler AT Mega 8
Kategori : Projek Akhir II
Nama : Andriani Nirwana Barus
Nomor Induk Mahasiswa : 112411007
Program Studi : Diploma (D3) Metrologi dan Instrumentasi
Departemen : Fisika
Fakultas : Matematika Dan Ilmu Pengetahuan Alam
Universitas Sumatera Utara
Disetujui di Medan, Juni 2014
Disetujui Oleh
Jurusan D3 Metrologi dan Instrumentasi FMIPA USU
Ketua, Pembimbing,
Dr. Diana Alemin Barus, M.Sc
NIP. 196607291992032002 NIP. 195801311986011001
ii
PERNYATAAN
ALAT UKUR INTENSITAS CAHAYA DENGAN MENGGUNAKAN SENSOR LDR BERBASIS MIKROKONTROLER AT MEGA 8
PROJEK AKHIR II
Saya mengakui bahwa laporan projek akhir II ini adalah hasil kerja saya sendiri. Kecuali beberapa kutipan dan ringkasan yang masing-masing disebutkan sumbernya.
Medan, Juni 2014
PENGHARGAAN
Segala puji bagi Allah SWT, yang telah memberikan kesehatan, serta pertolongan kepada penulis, sehingga penulis dapat menyelesaikan tugas akhir ini. Barang siapa yang Allah beri petunjuk, maka tidak ada yang dapat menyesatkannya, dan barang siapa yang Allah sesatkan, maka tidak ada yang dapat memberinya petunjuk. Dan tak lupa salawat beriring salam penulis sampaikan kepada Nabi Besar Muhammad SAW, yang telah membawa ke dunia yang terang benderang ini.
Terimakasih kepada kedua orang tua tercinta, yaitu Anthoni Readi Barus dan Misriani yang telah membesarkan penulis. Semoga buah hatimu ini kelak menjadi orang yang berguna bagi ayah dan ibu serta masyarakat. Begitu juga kepada saudara-saudari tercinta Dicky Kurniawan, Alfisyahrina Febriani Barus dan Mustaqim Ramadhan Barus yang telah banyak membantu dan menyemangati penulis. Hanya Allah yang dapat membalas jasa-jasa kalian semua.
Selama masa perkuliahan sampai penyelesaian tugas akhir ini, penulis banyak memperoleh bimbingan dari berbagai pihak. Untuk itu penulis ucapkan terimakasih yang sebesar-besarnya kepada :
1. Bapak Dr. Kurnia Sembiring, M.S selaku Dosen Pembimbing yang telah meluangkan waktu selama penyusunan tugas akhir ini. Semoga ilmu yang penulis dapat berguna untuk penulis dan masyarakat. Semoga Allah membalas semua kebaikan beliau yang telah diberikan kepada penulis. 2. Ibu Dr.Diana Alemin Barus, M.Sc, selaku Ketua Program Studi Metrologi
dan Instrumentasi Fakultas Matematika Dan Ilmu Pengetahuan Alam Universitas Sumatera Utara.
3. I
dan Instrumentasi Fakultas Matematika Dan Ilmu Pengetahuan Alam Universitas Sumatera Utara.
iv
5. Seluruh teman-teman DIII-Metrologi dan Instrumentasi yang terlah mendukung dan membantu penulis menyelesaikan tugas akhir.
6. Rhobby Maulana, Dwi Budi Prasetyo,Teguh Triantoro,Reza Al-Kausar dan seluruh setering comite, pengurus serta anggota UKM SIKONEK USU.
7. Dan semua pihak yang telah membantu penulis namun tidak dapat disebutkan satuper satu.
Penulis menyadari sepenuhnya bahwa dalam pembuatan Tugas Akhir ini masih jauh dari kesempurnaan, untuk itu penulis mengharapkan kritik dan saran dari pembaca yang bersifat membangun dalam penyempurnaan Tugas Akhir ini. Semoga laporan ini menjadi ibadah yang baik bagi penulis dan menjadi ilmu yang bermanfaat bagi pembaca.
Amin Yaa Rabbal’alamin
Medan, Juni 2014 Hormat Kami,
ALAT UKUR INTENSITAS CAHAYA DENGAN MENGGUNAKAN SENSOR LDR BERBASIS MIKROKONTROLER AT MEGA 8
ABSTRACT
An instrument prototype for visible light intensity measurement has been designed and fabricated for the purpose of final project to obtain ahli madya Metrology and instrumentasi Universitas Sumatera Utara . The instrument is mainly supported by microcontroller at mega 8 system as the measurement data processing center. Further more the result of the measurement processing is displayed on LCD screen.
To obtain the light intensity measurement data, it is required an instrument system which consists of microcontroller system, light dependent resistor (LDR) circuit to detect light intensity and convert it to analog voltage, and analog to digital converter (ADC) to convert from LDR circuit to be digital measured data for microcontroller. Furthermore, the microcontroller will prosess and calibrate the measurement data and dispays the data to the ouptut screen.
vi
ALAT UKUR INTENSITAS CAHAYA DENGAN MENGGUNAKAN SENSOR LDR BERBASIS MIKROKONTROLER AT MEGA 8
ABSTRAK
Dalam tugas akhir ini telah dirancang dan dibuat suatu sistem untuk mengukur besarnya intensitas cahaya. Sistem tersebut bebasis pada mikrokontroler sebagai pengolah data. Selanjutnya hasil pengukuran ditampilkan pada sebuah layar LCD.
Untuk dapat mengetahui informasi mengenai intensitas cahya, maka dibutuhkan suatu sistem perangkat keras pengukuran yang dilengkapi dengan perangkat lunak. Perangkat keras yang digunakan yaitu rangkaian sensor cahaya LDR ( Light Dependent Resistor ) untuk mendeteksi intensitas cahaya, kemudian mengkonversikannya menjadi tegangan. Rangkaian ADC ( Analog to Digital Converter ) untuk mengubah tegangan analog yang berasal dari rangkaian sensor cahaya, untuk menjadi data pengukuran digital. Sistem mikrokontroler untuk mengelolah dan mengkalibrasi data hasil pengukuran tersebut ditampilkan pada layar LCD ( Liquid Crstal Display ).
DAFTAR ISI
Halaman
Persetujuan ... i
Pernyataan...ii
Penghargaan ... iii
Abstract ... v
Abstrak ... vi
Daftar Isi ... vii
Daftar Tabel ... ix
Daftar Gambar ... x
Daftar Singkatan ... xii
Bab 1. Pendahuluan 1.1. Latar Belakang ... 1
1.2. Rumusan Masalah ... 2
1.3. Batasan Masalah ... 3
1.4. Tujuan Penelitian ... 3
1.5. Metode Penulisan ... 3
1.6. Sistematika Penulisan ... 4
Bab 2. Tinjauan Pustaka 2.1.Sensor Cahaya ... 6
2.2.Light Dependent Resistor (LDR)... 8
2.2.1. Sensitivitas ... 9
2.2.2. Spektrum Respons ... 10
2.2.3. Kecepatan Respons ... 10
2.3.Mikrokontroler... 12
2.3.1. Sejarah Mikrokontroler ... 12
2.3.2. Mikrokontroler Atmega 8 ... 13
2.3.3. Fitur Atmega 8 ... 14
2.3.4. Konfigurasi Pin AVR Atmega 8 ... 15
2.3.5. Blok Diagram Atmega 8 ... 18
2.3.6. Arsitektur Mikrokontroler AVR RISC ... 19
2.3.7. General Purpose Register AVR... 21
2.3.8. Stack Pointer ... 21
2.3.9. Peta Memori AVR Atmega 8 ... 22
2.3.10.Status Register ... 23
viii
2.3.12.Komunikasi Serial pada Atmega 8 ... 25
2.4.Analog To Digital Converter ( ADC ) ... 27
2.5.Pemrograman Mikrokontroler Menggunakan CodeVision AVR .... 28
2.6.Software Desain PCB ... 32
2.6.1. Fungsi Tiap Fitur Proteus Prof 7.7 ... 33
Bab 3. Perancangan Alat Dan Program 3.1. Prinsip Kerja Alat ... 35
3.1.1. Blok Diagram dan Fungsinya ... 35
3.2. Perangkat Keras ... 36
3.2.1. Rangkaian Sensor Cahaya LDR ... 36
3.2.2. Mikrokontroler ... 37
3.2.3. Saklar... 38
3.2.4. Sirkit Display LCD ... 38
3.2.5. ADC ... 39
3.3. Perangkat Lunak ... 39
Bab 4. Pengujian Rangkaian Dan Analisa Program 4.1. Hasil Rancangan Bangun... 41
4.2. Koefisien Kalibrasi ... 42
4.3. Pengkalibrasian Alat ... 43
4.4. Pengukuran Intensitas cahaya ... 44
4.5. Analisa Sistem ... 48
Bab 5. Kesimpulan 5.1. Kesimpulan……….50
5.2 Saran... 51
Daftar Pustaka ... 52
DAFTAR TABEL
Nomor
Tabel Judul Halaman
2.1 Fungsi khusus Port b 16
2.2 Fungsi khusus Port C 17
2.3 Nama-Nama Fitur Proteus Profesional
dan Kegunaannya 33
3.1 Pin LCD dan Fungsinya 38
4.1 Data Koefisien Kalibrasi 42
4.2 Data Pengujian Pertama 44
4.3 Data Pengujian Kedua 45
4.4 Data Pengujian Ketiga 46
4.5 Data Pengujian Keempat 46
4.6 Data Pengujian Kelima 47
x
DAFTAR GAMBAR
Nomor
Gambar Judul Halaman
2.1 Cahaya yang tak terpolarisasi dan
cahaya yang terpolarisasi 6
2.2 Warna-warna spectrum 7
2.3 Grafik Kepekaan Mata 8
2.4 Bentuk LDR 8
2.5 Grafik Iluminasi Cahaya 9
2.6 Geometri Elektroda Permukaan LDR 10
2.7 Grafik Respon LDR 10
2.8 Grafik Respons Waktu 11
2.9 ATMEGA 8 14
2.10 Konfigurasi kaki ( pin ) atmega 8 15
2.11 Blok Diagram Atmega 8 18
2.12 Arsitektur Mikrokontroler AVR RISC 19
2.13 Arsitektur Harvard 19
2.14 Proses pengambilan instruksi dan
pengeksekusian instruksi secara parallel 20
2.15 Prinsip kerja Pipelining 20
2.16 General Purpose Register AVR 21
2.17 Stack Pointer 21
2.18 Peta Memori At mega 8 22
2.19 Status Register Atmega 8 23
2.20 Blok USART 26
2.21 Diagram blok ADC 28
2.22 Tampilan Pertama Kali CodeVision
dijalankan 32
2.23 Tampilan window Proteus Prof 33
3.1 Blok Diagram Sistem Secara
Keseluruhan 35
3.2 Skematik diagram perangkat keras
sistem 37
3.3 LCD 2x16 karakter 38
3.4 Blok diagram LCD 38
3.5
Diagram alir program miktokontroler untuk pemrosesan data pengukuran intensitas cahaya
40
4.1 Perangkat Keras dari bagian Luar 41
4.3 Grafik Lux Meter Standar Vs Lux
Meter Uji 43
4.4 Grafik Lux Meter Standar Vs Lux
Meter Uji Pengukuran Pertama 45
4.5 Grafik Lux Meter Standar Vs Lux
Meter Uji Pengukuran Kedua 45
4.6 Grafik Lux Meter Standar Vs Lux
Meter Uji Pengukuran Ketiga 46
4.7 Grafik Lux Meter Standar Vs Lux
Meter Uji Pengukuran Empat 47
4.8 Grafik Lux Meter Standar Vs Lux
xii
DAFTAR SINGKATAN
ADC = Analog to Digital Converter AIN1 = Analog Comparator Negative Input AIN0 = Analog Comparator Positive Input ALU = Arithmetic Logic Unit
BIOS = Basic Input Ouput System
BLD = Bit Load
BSN = Badan Standarisasi Nasional
BST = Bit Store
Cds = Kadmium Sulfide DAC = Digital to Analog
DBMS = Database Management System DOS = Disk Operating System
GPR = General Purphose Register IC = Intergrated Circuit
ICP = Input Capture Pin
IDE = Integrated Development Environtment INT 1 = External Interrupt 1 Input
T1 = Timer/Counter1 External Counter Input T0 = Timer/Counter0 External Counter Input TOSC1 = Timer Oscillator Pin 1
TOSC2 = Timer Oscillator Pin 2
ALAT UKUR INTENSITAS CAHAYA DENGAN MENGGUNAKAN SENSOR LDR BERBASIS MIKROKONTROLER AT MEGA 8
ABSTRACT
An instrument prototype for visible light intensity measurement has been designed and fabricated for the purpose of final project to obtain ahli madya Metrology and instrumentasi Universitas Sumatera Utara . The instrument is mainly supported by microcontroller at mega 8 system as the measurement data processing center. Further more the result of the measurement processing is displayed on LCD screen.
To obtain the light intensity measurement data, it is required an instrument system which consists of microcontroller system, light dependent resistor (LDR) circuit to detect light intensity and convert it to analog voltage, and analog to digital converter (ADC) to convert from LDR circuit to be digital measured data for microcontroller. Furthermore, the microcontroller will prosess and calibrate the measurement data and dispays the data to the ouptut screen.
vi
ALAT UKUR INTENSITAS CAHAYA DENGAN MENGGUNAKAN SENSOR LDR BERBASIS MIKROKONTROLER AT MEGA 8
ABSTRAK
Dalam tugas akhir ini telah dirancang dan dibuat suatu sistem untuk mengukur besarnya intensitas cahaya. Sistem tersebut bebasis pada mikrokontroler sebagai pengolah data. Selanjutnya hasil pengukuran ditampilkan pada sebuah layar LCD.
Untuk dapat mengetahui informasi mengenai intensitas cahya, maka dibutuhkan suatu sistem perangkat keras pengukuran yang dilengkapi dengan perangkat lunak. Perangkat keras yang digunakan yaitu rangkaian sensor cahaya LDR ( Light Dependent Resistor ) untuk mendeteksi intensitas cahaya, kemudian mengkonversikannya menjadi tegangan. Rangkaian ADC ( Analog to Digital Converter ) untuk mengubah tegangan analog yang berasal dari rangkaian sensor cahaya, untuk menjadi data pengukuran digital. Sistem mikrokontroler untuk mengelolah dan mengkalibrasi data hasil pengukuran tersebut ditampilkan pada layar LCD ( Liquid Crstal Display ).
BAB 1
PENDAHULUAN
1.1. Latar belakang
Cahaya dan sinar, kedua kata ini sepintas mempunyai makna yang sama. Namun, bila dikaji lebih mendalam, cahaya dan sinar sangatlah berlainan. Cahaya adalah suatu bentuk pancaran energi yang mana mempunyai kapasitas atau kemampuan untuk merangsang sensasi penglihatan. Cahaya dalam berbagai hal memperlihatkan karakternya sebagai gelombang, tetapi dalam gerakan cahaya itu merupakan garis lurus dan dalam hal tertentu cahaya disebut pula sebagai sinar. Namun kata sinar ini biasanya dipakai untuk menunjukkan bentuk energi gelombang elektromagnetik, misalnya sinal X, sinar gamma dan sinar kosmis.
Pencahayaan merupakan salah satu faktor penting dalam perancangan ruang. Ruang yang telah dirancang tidak dapat memenuhi fungsinya dengan baik apabila tidak disediakan akses pencahayaan. Pencahayaan di dalam ruang memungkinkan orang yang menempatinya dapat melihat benda. Tanpa dapat melihat benda-benda dengan jelas maka aktivitas di dalam ruangan akan terganggu. Sebaliknya cahaya yang terlalu terang juga dapat menggangu penglihatan.
Kualitas penerangan yang tidak memadai berefek buruk bagi fungsi penglihatan psikologis serta aktivitas kerja sesuai Peraturan Menteri Perburuhan Nomor 7 Tahun 1964 tentang Syarat-Syarat Kesehatan,Kebersihan serta Penerangan dalam Tempat Kerja, telah menetapkan ketentuan penting intensitas penerangan menurut sifat pekerjaan.
2
mengakibatkan ketidak nyamanan serta proses pendidikan menjadi terganggu. Sedangkan efektivitas proses pendidikan didasarkan pada beberapa hal seperti kenyamanan pengajar dan peserta didik. Hal ini menunjukkan bahwa intensitas cahaya harus diperhatikan.
Pencahayaan terdiri dari pencahayaan matahari dan pencahayaan buatan. Pencahayaan di ruang kelas harus memperhatikan beberapa aspek, yaitu:
a. Menciptakan lingkungan visual yang nyaman, sehingga segala kegiatan di dalam ruang kelas bisa berjalan dengan baik.
b. Penggunaan energi yang sesuai dengan fungsi ruang kelas.
Dalam upaya mendapatkan kenyamanan, ketenangan dan efisiensi energi listrik, ruang kelas perlu mendapatkan sistem penerangan yang sesuai dengan fungsi ruangan. Berdasarkan data dari Badan Standarisasi Nasional (BSN), intensitas cahaya diruang kelas minimal 250 lux dengan nilai toleransi maksimal hingga 20%, dan daya pencerahan maksimum per meter persegi sebesar 15 watt/m2, sesuai dengan SNI 03-6197-2000.
Pemakaian penerangan yang berlebihan juga berhubungan dengan efisiensi penggunaan energi listrik sehingga diperlukan peratutan penerangan. Dengan demikian intensitas cahaya perlu diatur untuk menghasilkan kesesuaian kebutuhan luminasi di dalam ruang berdasarkan jenis dan fungsi ruangan.
Untuk mengetahui kondisi tersebut, maka diperlukan suatu alat yang bisa megukur intensitas cahaya. Pada umumnya alat ukur intensitas cahaya mempunyai harga yang cukup mahal. Berawal dari kasus tersebut muncul ide merancang dan mengembangkan alat yang berfungsi untuk mengetahui dan mengukur intensitas cahaya dalam suatu ruangan.
1.2.Rumusan Masalah
1. Bagaimana cara merancang alat ukur intensitas cahaya dengan menggunakan LDR dan Mikrokontroler At mega 8.
3. Menggunakan Software CodeVision AVR untuk melakukan pemrograman alat ukur intensitas cahaya.
4. Menganalisa rangkaian alat ukur intensitas cahaya yang telah dirancang berdasarkan skematik yang telah dibuat.
1.3.Batasan Masalah
1. Menjelaskan bagaimana prinsip kerja LDR.
2. Menggunakan prinsip Low Pass Filter (LPF) untuk mengurangi noise yang tidak diinginkan,
3. Membutuhkan Op-Am yang tepat untuk memperkuat sinyal yang diterima. 4. Pengujian dilakukan pada ruang perkuliahan Universitas Sumatera Utara.
1.4.Tujuan Penelitian
1. Mengetahui faktor-faktor yang menyebabkan perbedaan intensitas cahaya pada ruang perkuliahan.
2. Memperoleh kesimpulan mengenai pengaruh yang timbul aikbat perbedaan intensitas cahaya.
3. Menentukan intensitas cahaya yang sesuai dengan persyaratan yang telah ditentukan.
4. Membantu mahasiswa untuk menyelesaikan tugas akhir.
5. Membantu mahsiswa belajar bertanggung jawab terhadap setiap permasalahan yang terjadi di bidang instrumentasi yang dipelajari.
1.5. Metode Penelitian 1. Studi pustaka
Penulisan mengumpulkan data dan teori yang dibutuhkan dalam penulisan tugas akhir melalui buku-buku dan referensi laiinya yang berkaiatan dengan tugas akhir.
4
Lembar data (Datasheet) merupakan data-data yang dikeluarkan oleh produsen komponen elektronika mengenai fungsi,karakteristik dan data data penting lainnya tentang komponen hasil produksi dari produsen komponen elektronika yang bersangkurtan.
3. Persiapan pembuatan konsep alat ukur
Merupakan suatu tahap awal dalam merumuskan masalah dan membuat rancangan konsep dalam menyelesaikan suatu masalah. Bentuknya adalah konsep tertulis dan tergambarkan dalam bentuk diagram blok.
4. Perancangan dan pembuatan alat ukur
Proses merancang desain dan bentuk alat ukur sampai membuat alat ukurnya.
5. Menguji mekanik dan elektronik dari alat ukur
Merupakan tahap menguji mekanik dan elektronik dari alat ukur, untuk dilanjutkan agar dapat melakukan pemograman.
6. Proses pembuatan pemrograman 7. Uji tahap awal
8. Mengkalibrasi alat ukur
9. Membuat kesimpulan dari hasil alat ukur intensitas cahaya.
1.6. Sistematika Penulisan
BAB I PENDAHULUAN
Berisi judul latar belakang permasalahan, rumusan masalah, batasan masalah, tujuan pembahasan, metodologi pembahasan, sistematika penulisan dan relevansi dari penulisan tugas akhir ini.
BAB II LANDASAN TEORI
Atmega 8, LDR, program yang dipergunakan, serta cara kerja dari mikrokontroler Atmega 8 dan komponen pendukung.
BAB III PERANCANGAN SISTEM
Membahas tentang perencanaan dan pembua tan sistem secara keseluruhan.
BAB IV PENGUJIAN RANGKAIAN
Berisi tentang uji coba alat yang telah dibuat, pengoperasian dan spesifikasi alat dan lain-lain.
BAB V KESIMPULAN DAN SARAN
BAB 2
LANDASAN TEORI
Landasan teori sangat membantu untuk dapat memahami suatu sistem. Selain dari pada itu dapat juga dijadikan sebagai bahan acuan didalam merencanakan suatu sistem. Dengan pertimbangan hal-hal tersebut, maka landasan teori merupakan bagian yang harus dipahami untuk pembahasan selanjutnya. Pengetahuan yang mendukung perencanaan dan realisasi alat meliputi mikrokontroler ATMega 8A, sensor cahaya LDR, LCD dan program.
2.1. CAHAYA
Cahaya adalah suatu bentuk pancaran energi yang mana mempunyai kapasitas arau kemampuan untuk merangsag sensasi penglihatan. Cahaya dari kebanyakan sumber adalah tidak terpolarisasi yang berarti bahwa arah dari medan –E dan medan –B adalah acak, bahkan ketika cahaya bergerak dalam arah yang sama. Pada cahaya yang terpolarisasi, gelombang cahayanya mempunyai medan listrik dan medan magnetik yang bersekutu (gambar 2.1).
Salah satu dari sekian banyak cara agar cahaya menjadi terpolarisasi adalah dengan menembus sebuah filter polarisasi. Filter polarisasi merupakan lembaran-lembaran plastik dengan berjuta-juta molekul memanjang linear yang bersekutu. Apabila cahaya menembus filter polarisasi, gelombang-gelombang cahaya yang medan listriknya sejajar terhadap molekul-molekul tersebutt membentuk arus di dalam molekul dan kemudian diserap. Gelombang-gelombang cahaya yang medan listriknya tegak lurus terhadap molekul-molekul tersebut tidak diserap.
Tak terpolarisasi Terpolarisasi
Cahaya merupakan gelombang elektromagnetik yang dapat dilihat dengan mata. Suatu sumber cahaya memancarkan energy, sebagaian dari energy ini diubah menjadi cahaya tampak. Perambatan cahaya di ruang bebas dilakukan oleh gelombang elektromagnetik.
Kecepatan rambat ( v ) gelombang elektromagnetik di ruang bebas sama dengan 3 x 108 meter per detik. Jika frekuensi (f) dan panjang gelombang �, maka berlaku :
�= �
� ………….1
Dimana � adalah panjang gelombang, dengan satuan meter (m)
v adalah kecepatan cahaya, dengan satuan meter per detik (m/s) f adalah frekunsi, dengan satuan hertz ( Hz )
Panjang gelombang cahaya tampak berkisar antara 350 namometer ( nm ) hingga 790 nanometer ( nm ). Yang terdiri atas beberapa daerah warna seperti yang terlihat pada gambar 2.2 berikut ini :
Gambar 2.2 Warna-warna spektrum
8
Selain memiliki warna tertentu, setiap panjang gelombang juga memiliki intensitas. Mata manusia paling peka cahaya dengan panjang gelombang 555 nm, yaitu cahaya berwarna kuning-hijau. Warna- warna yang lain dengan intensitas yang sama lebih redup, seperti yang terlihat pada grafik kepekaan mata gambar 2.3 berikut ini.
Gambar 2.3 Grafik Kepekaan Mata
2.2.LIGHT DEPENDENT RESISTOR ( LDR )
Sebuah light dependent resistor ( LDR ) terdiri dari sebuah piringan bahan semikonduktor dengan dua buah elektroda pada perumukaannya. Biasanya LDR terbuat dari bahan CdS, CdSe, PbS, dan Bi2Se3. Gambar 2.4 menunjukan salah satu
bentuk LDR.
Gambar 2.4 Bentuk dan Simbol LDR
bersifat sebagai konduktor yang buruk untuk mengalirkan arus listrik. Dengan kata lain, nilai tahanan bahan sangat tinggi.
Dibawah cahaya yang terang, lebih banyak elektron dapat melepaskan dari atom-atom bahan semikonduktor ini. Terdapat lebih banyak elektron bebas yang mengalirkan muatan listrik. Hal ini disebabkan adanya efek foto elektrik yaitu fenomena quantum elektron dimana elektron-elektron dipancarkan atau dilepas oleh suau bahan setelah menyerap energi dari radiasi gelombang elektromagnetik seperti sinar X atau cahaya tampak. Dalam keadaan ini, bahan bersifat sebagai konduktor yang baik. Tahanan listrik bahan rendah. Semakin terang cahaya yang mengenai bahan, semakin banyak electron bebas yang tersedia, dan semakin rendah pula tahanan listrik bahan. Gambar 2.5 menunjukan grafik hubungan antara intensitas cahaya terhadap resistansi LDR.
ILLUMINATION LOG (fc)
LOG (Ohms)
R ON
Gambar 2.5 Grafik Iluminasi Cahaya 2.2.1. Sensitivitas
Sensitivitas suatu LDR berhubungan dengan cahaya yang mengenainya dan hasil output sinyalnya. Resistansi LDR pada suatu tingkat intensitas cahaya tertentu, seperti yang ditunjukan pada gambar 2.6, ditemukan dengan formula berikut :
�� =�� �� ……… 2
Dimana RH adalah resistansi LDR pada intensitas cahaya level H
�H adalah data sensitivitas bahan LDR pada intensitas cahaya level H
10
Gambar 2.6 Geometri Elektroda Permukaan LDR
Pada gambar 2.6 diatas bahwa bagian yang sensitif terhadap perubahan cahaya, dibentuk dalam struktur yang berliku-liku, hal ini dimaksudkan agar resolusi tahananya dapat sekecil mungkin.
2.2.2. Spektrum Respons
Seperti halnya mata manusia, sensitivitas LDR juga tergantung dari panjang gelombang cahaya yang mengenainya. Masing-masing jenis material bahan semikonduktor LDR mempunyai grafik spektrum respons sendiri. Gambar 2.7 menunjukan grafik respons suatu jenis LDR yang banyak dipasaran terhadap spektrum panjang gelombang cahaya.
Gambar 2.7 Grafik Respon LDR 2.2.3. Kecepatan Respons
diperlukan konduktansi cahaya pada LDR untuk mencapai 1 – e-1 ( sekitar 63 % ) dari nilai akhirnya. Waktu turun didefinisikan sebagai waktu yang diperlukan konduktansi cahaya pada LDR untuk menurun sampai e-1 ( sekitar 37 % ) dari keadaan teriluminasi, dimana e adalah bilangan Euler yang besarnya 2,718. Pada 1 fc ( footcandela) iluminasi, waktu respons sekitar 5 msec sampai 100 msec.
Untuk kerja kecepatan respons suatu LDR berkaian dengan sifat dari bahan semikonduktor pembentuknya, yaitu sifat carrier lifetime bahan semikonduktor. Pada beberapa semikonduktor, hole-electron berpasang-pasangan pada suatu suhu ruangan. Pembuatan electron dan hole pada bahan semikonduktor akan memerlukan energi. Ketika electron terbentuk maka hole pun akan terbentuk. Energi untuk membangkitkan terbentuknya electron dan hole tersebut dapat berupa energi panas ataupun energi yang dihasilkan dari cahaya yang mengenai bahan semikonduktor tersebut. Pengukuran lamanya waktu untuk berekombinasi kembali antara hole dan electron seperti keadaan sebelumnya setelah energi pembangkitnya hilang dinamakan carrier lifetime.
Gambar 2.8 Grafik Respons Waktu
Kecepatan respons juga dipengaruhi oleh terang redupnya cahaya. Semua jenis material LDR menunjukan kecepatan responsnya lebih tinggi saat level cahaya lebih terang dan kecepatan lebih rendah saat cahaya lebih redup. Penyimpanan LDR di ruang yang gelap akan menyebabkan respons lebih lambat dari pada penyimpanan diruang yang terang.
0 0,5 1
0 0,01 0,1 1 10 100
Response Time vs Illumination (Rise Time)
0 0,05 0,1
0 0,01 0,1 1 10 100
12
2.3. MIKROKONTROLER
Mikrontroler merupakan sistem computer yang seluruh atau sebagian besar elemenya dikemas dalam satu chip IC, sehingga sering juga disebut dengan single chip microcomputer. Mikrokontroler biasa dikelompokkan dalam satu keluarga, masing-masing mikrokontroler mempunyai spesifikasi tersendiri namun masik kompatibel dengan pemrogramannya.
Pada saat ini penggunaan mikrokontroler dapat kita temui pada berbagai peralatan, misalnya peralatan yang terdapat dirumah, seperti telepon digital, micromave oven, televisi, mesin cuci, sistem keamanan rumah, PDA,dll. Mikrokontroler dapat kita gunakan untuk berbagai aplikasi mislnya untuk pengendalian, otomasi industry, akuisisi data, telekomunikasi dan lain-lain. Keuntungan menggunakan mikrokontroler yaitu harganya murah, dapat deprogram berulang kali, dan dapat kita program sesuai dengan keinginan kita. Saat ini keluarga mikrokontroler yang ada dipasaran yaitu Intel 8084 dan 8051 (MCS51), Motorola
68HC11, Microchip PIC, Hitachi H8, dan Atmel AVR.
2.3.1. Sejarah Mikrokontroler
Mikrokontroler dikembangkan dari mikroprosesor. Berikut ini sejarah perkembangan teknologi mikroprosesor dan mikrokontroler.
• Tahun 1617, John Napier menemukan sistem untuk melakukan perkalian dan pembagian berdasarkan logaritma.
• Tahun 1694, Gottfriend Wilhelm Leibniz membuat mesin mekanik yang dapat melakukan operasi +, - , * , / , dan akar kuadrat.
• Tahun 1835, Charles Babbage mengusulkan computer digital pertama didunia menggunakan punched card untuk data dan instruksi, serta program control dengan unit aritmatika dan unit penyimpanan.
• Tahun 1946, Von Neumann menyarankan bahwa instruksi menjadi kode numerik yang disimpan pada memori. Komputer dan semua desain mikrokontroler didasarkan pada komputer Von Neumann.
• Tahun 1948, Transistor ditemukan. Dengan dikembangkannya konsep software, pada tahun 1948 mulai adanya perkembangan hardware penting seperti transistor.
• Tahun 1959, IC (Intergrated Circuit) pertama dibuat.
• Tahun 1971, Intel 4004 dibuat, yang merupakan Mikroprosesor pertama. Terdiri dari 2250 transistor. Kemudian Intel membuat Intel 8008, mikroposesor 8 bit. Semakin besar ukuran bit berarti mikroprosesor dapat memproses lebih banyak data.
• Tahun 1972, TMS 1000, buatan Texas Instrumen, Mikrokontroler pertama yang dibuat.
• Tahun 1974, beberapa pabrikan IC menawarkan mikroposesor dan pengendalian menggunakan mikroprosesor yang ditawarkan pada saat itu yaitu 8080,8085, Motorola 6800, signetics 6502, Zilog z80,dan Texas Instruments 9900 ( 16 bit ).
• Tahun 1978, mikroprosesor 16 bit menjadi lebih umum digunakan yaitu Intel 8086, Motorola 68000 dan Zilog Z8000. Sejak saat itu pabrikmikroprosesor terus mengembangkan mikroprosesor dengan berbagai keistimewaan dan arsitektur. Mikroprosesor yang dikembangkan termasuk mikroprosesor 32 bit seperti Intel Pentium, Motorola Dragon Ball, dan beberapa mikrokontroler yang menggunakan ARM core.
2.3.2. Mikrokontroler ATMEGA 8
14
Gambar 2.9. ATMEGA 8
Mikrokontroler ini diproduksi oleh atmel dari seri AVR. Untuk seri AVR ini banyak jenisnya, yaitu ATmega8, ATmega8535, Mega8515, Mega16, dan lain-lain. Mikrokontroler ATmega8 ini sangat murah dan mempunyai fasilitas yang sangat memadai untuk mengembangkan berbagai aplikasi.
Keuntungan lainya dalam menggunakan ATMEGA8 ini, jika ada perubahan cara kerja sistem maka kita tidak perlu merubah rangkaianya, tetapi hanya dengan merubah Program - program yang lama dengan memasukan program - program atau instruksi yang baru.
2.3.3. Fitur ATMEGA 8
Beberapa fitur dari ATmega8 adalah sebagai berikut :
1. Mikrokontroler AVR 8 bit yang memiliki kemampuan tinggi, dengan daya rendah.
2. Arsitektur RISC dengan throughput mencapai 8 MIPS pada frekuensi 8 Mhz. 3. Memiliki kapasitas Flash Program 8 Kbyte, EEPROM 512 Byte dan SRAM 1
KByte.
4. Saluran I/O sebanyak 22 buah yaitu Port B, Port C, dan Port D. 5. CPU yang terdiri atas 22 buah register.
6. Unit interupsi internal dan eksternal. 7. Port USART untuk komunikasi serial. 8. Fitur Peripheral
- 2 ( dua ) buah Timer/Counter 8 bit dengan Prescaler terpisah dan Mode Compare.
- 1 ( satu ) buah Timer/Counter 16 bit dengan Prescaler terpisah, Mode Compare, dan Mode Capture.
• Real Time Counter dengan Osillator tersendiri.
• 4 channel PWM.
• 8 Channel, 10 bit ADC.
• Byte-oriented Two-wire Serial Interface.
• Programmable Serial USART.
• Antarmuka SPI.
• Watchdog Timer dengan oscillator internal.
• On-chip Analog Comparator. 2.3.4. Konfigurasi Pin AVR ATMEGA 8
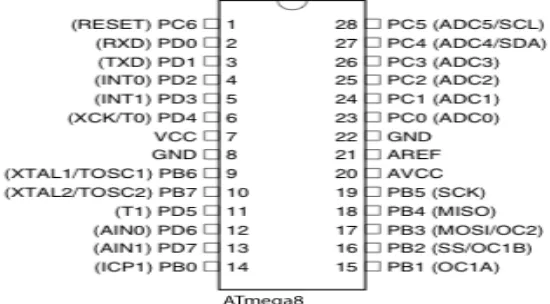
Konfigurasi kaki (pin) Atmega 8 dapat dilihat pada gambar 2.10 dibawah ini :
Gambar 2.10 Konfigurasi kaki ( pin ) atmega 8
ATmega8 memiliki 28 Pin, yang masing-masing pin nya memiliki fungsi yang berbeda-beda baik sebagai port maupun fungsi yang lainnya. Berikut akan dijelaskan fungsi dari masing-masing kaki ATmega8.
1. VCC merupakan pin yang berfungsi sebagai masukan catu daya. 2. GND merupakan pin Ground.
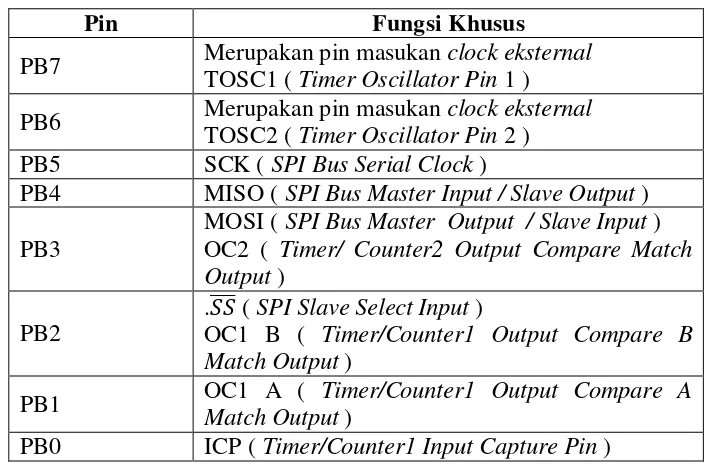
3. Port B (PB7...PB0)
16 internal, PB7 dan PB6 dapat digunakan sebagai I/O atau jika menggunakan Asyncronous Timer/Counter2 maka PB6 dan PB7 (TOSC2 dan TOSC1) digunakan untuk saluran input timer. Fungsi- fungsi Port B dapat dilihat lebih mudah seperti pada table di bawah ini :
Tabel 2.1 Fungsi khusus Port B Pin Fungsi Khusus
PB7 Merupakan pin masukan clock eksternal TOSC1 ( Timer Oscillator Pin 1 )
PB6 Merupakan pin masukan clock eksternal TOSC2 ( Timer Oscillator Pin 2 )
PB5 SCK ( SPI Bus Serial Clock )
PB4 MISO ( SPI Bus Master Input / Slave Output ) PB3
MOSI ( SPI Bus Master Output / Slave Input ) OC2 ( Timer/ Counter2 Output Compare Match Output )
PB2
.����� ( SPI Slave Select Input )
OC1 B ( Timer/Counter1 Output Compare B Match Output )
PB1 OC1 A ( Timer/Counter1 Output Compare A Match Output )
PB0 ICP ( Timer/Counter1 Input Capture Pin )
4. Port C (PC6…PC0)
masing- masing pin terdapat pull-up resistor. Jumlah pin nya hanya 7 buah mulai dari pin C.0 sampai dengan pin C.6. Sebagai keluaran/output port C memiliki karakteristik yang sama dalam hal menyerap arus (sink) ataupun mengeluarkan arus (source). Jika RSTDISBL Fuse diprogram, maka PC6 akan berfungsi sebagai pin I/O. Pin ini memiliki karakteristik yang berbeda dengan pin-pin yang terdapat pada port C lainnya. Namun jika RSTDISBL Fuse tidak diprogram, maka pin ini akan berfungsi sebagai input reset. Dan jika level tegangan yang masuk ke pin ini rendah dan pulsa yang ada lebih pendek dari pulsa minimum, maka akan menghasilkan suatu kondisi reset meskipun clock-nya tidak bekerja. 5. Port D ( PD7..PD0 )
Port D merupakan 8-bit bi-directional I/O dengan internal pull-up resistor. Fungsi dari port ini sama dengan port-port yang lain. Hanya saja pada port ini tidak terdapat kegunaan-kegunaan yang lain. Pada port ini hanya berfungsi sebagai masukan dan keluaran saja atau biasa disebut dengan I/O. Fungsi- fungsi Port D dapat dilihat lebih mudah seperti pada table di bawah ini :
Tabel 2.2 Fungsi khusus Port B Pin Fungsi Khusus
PD7 AIN1 ( Analog Comparator Negative Input ) PD6 AIN0 ( Analog Comparator Positive Input ) PD5 T1 ( Timer/Counter1 External Counter Input ) PD4 XCK ( USART External Clock Input/Output )
18
tetap saja disarankan untuk menghubungkannya secara terpisah dengan VCC. Jika ADC digunakan, maka AVcc harus dihubungkan ke VCC melalui low pass filter.
7. AREF
Merupakan pin masukan tegangan referensi ADC.
2.3.5. Blok Diagram ATMEGA 8
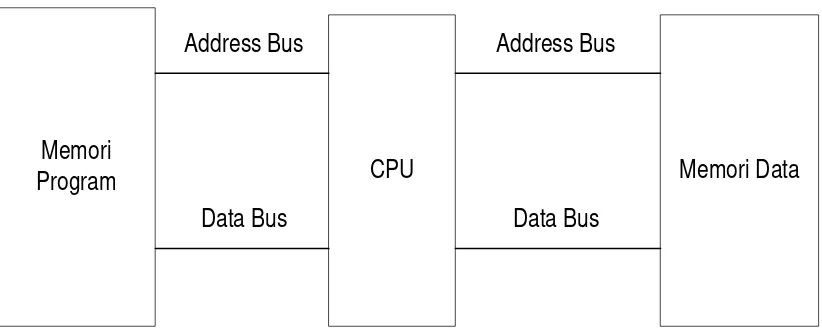
2.3.6. Arsitektur Mikrokontroler AVR RISC
Gambar 2.12 Arsitektur Mikrokontroler AVR RISC
Memori
Program CPU Memori Data
Address Bus
Data Bus
Address Bus
Data Bus
20
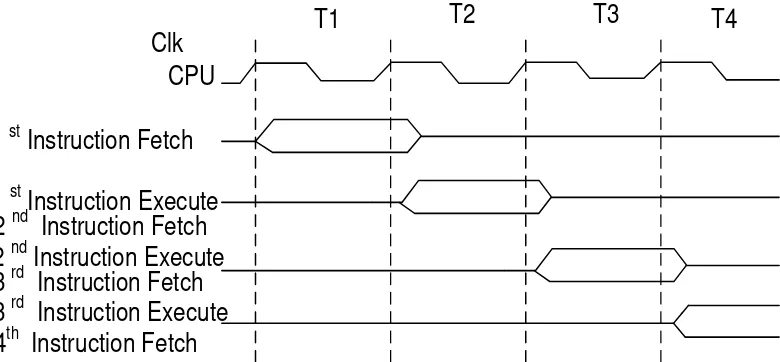
Dari gambar diatas AVR, menggunakan arsitektur Harvard dengan memisahkan antara memori dan bus untuk program dan data untuk memaksimalkan kemampuan dan kecepatan. Instruksi dalam memori program dieksekusi dengan pipelining single level . Dimana ketika satu instruksi dieksekusi, instruksi berikutnya diambil dari memori program. Konsep ini mengakibatkan instruksi dieksekusi setiap clock cycle. CPU terdiri dari 32 x 8 bit general purpose register yang dapat diakses dengan cepat dalam satu clock cycle, yang mengakibatkan operasi Arithmetic Logic Unit (ALU) dapat dilakukan dalam satu cycle. Pada operasi ALU, dua operand berasal dari register, kemudian operasi dieksekusi dan hasilnya disimpan kembali pada reegister dalam satu clock cycle. Operasi aritmatika dan logic pada ALU akan mengubah bit-bit yang terdapat pada Status Register (SREG). Proses pengambilan instruksi dan pengeksekusian instruksi berjalan secara parallel, dapat dilihat pada gambar dibawah ini :
T1
T2
T3
T4
Clk
CPU
1
stInstruction Fetch
1
stInstruction Execute
2
ndInstruction Fetch
2
ndInstruction Execute
3
rdInstruction Fetch
3
rdInstruction Execute
4
thInstruction Fetch
Gambar 2.14 Proses pengambilan instruksi dan pengeksekusian instruksi secara parallel
Instruksi 1 : Fetching 1 Executing 1
Instruksi 2 : Fetching 2 Executing 2
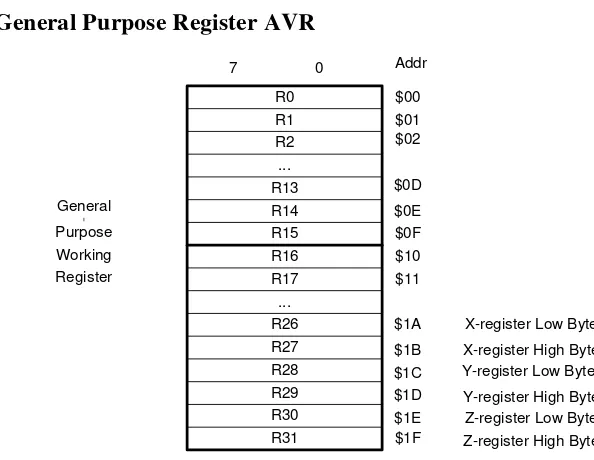
2.3.7. General Purpose Register AVR
Gambar 2.16 General Purpose Register AVR
Gambar diatas menunjukkan struktur 32 general purpose register yang terdapat di dalam CPU, masing- masing register ditentukan juga dalam alamat memori data, dipetakan kedalam 32 lokasi pertama data user. Walaupun tidak secara fisik diimplementasikan sebagai lokasi SRAM, namun pengaturan ini memberikan flexsibilitas dalam mengakses register, seperti register pointer X,Y, dan Z dapat diset menuju index dari register file manapun.
2.3.8. Stack Pointer
Stack digunakan untuk menyimpan data sementara, untuk menyimpan variable local dan untuk menyimpan return address setelah interrupt dan pemanggilan subrutin. Stack pointer selalu menunjuk ke puncak stack. Stack diimplementasi mulai dari lokasi memori tertinggi ke lokasi memori terendah, sehingga perintah PUSH akan mengurangi Stack Pointer.
SP 15
22
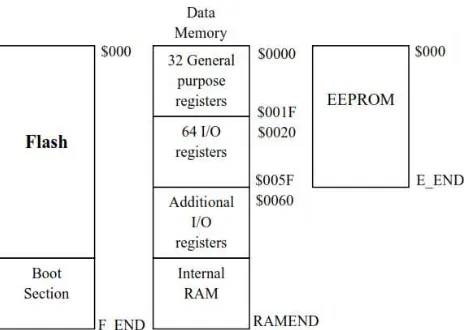
2.3.9. Peta Memori AVR ATmega 8
Gambar 2.18 Peta Memori At mega 8
Memori atmega terbagi menjadi tiga yaitu : 1. Memori Flash
Memori flash adalah memori ROM tempat kode-kode program berada. Kata flash menunjukan jenis ROM yng dapat ditulis dan dihapus secara elektrik. Memori flash terbagi menjadi dua bagian yaitu bagian aplikasi dan bagian boot. Bagian aplikasi adalah bagian kode-kode program apikasi berada. Bagian boot adalah bagian yang digunakan khusus untuk booting awal yang dapat diprogram untuk menulis bagian aplikasi tanpa melalui programmer/downloader, misalnya melalui USART.
2. Memori Data
“chace memory”. I/O register dan Aditional I/O register adalah register yang difungsikan khusus untuk mengendalikan berbagai pheripheral dalam mikrokontroler seperti pin port, timer/counter, usart dan lain-lain. Register ini dalam keluarga mikrokontrol MCS51 dikenal sebagi SFR(Special Function Register).
3. EEPROM
EEPROM adalah memori data yang dapat mengendap ketika chip mati (off), digunakan untuk keperluan penyimpanan data yang tahan terhadap gangguan catu daya.
2.3.10.Status Register ( SREG )
Pada AVR status register mengandung beberapa informasi mengenai hasil dari kebanyakan hasil eksekusi instruksi aritmatik. Informasi ini digunakan untuk altering arus program sebagai kegunaan untuk meningkatkan performa pengoperasian. Register ini di-update setelah operasi ALU (Arithmetic Logic Unit) hal tersebut seperti yang tertulis dalam datasheet khususnya pada bagian Instruction Set Reference. Dalam hal ini untuk beberapa kasus dapat membuang penggunaan kebutuhan instrukasi perbandingan yang telah didedikasikan serta dapat menghasilkan peningkatan dalam hal kecepatan dan kode yang lebih sederhana dan singkat. Register ini tidak secara otomatis tersimpan ketika memasuki sebuah rutin interupsi dan juga ketika menjalankan sebuah perintah setelah kembali dari interupsi. Namun hal tersebut harus dilakukan melalui software. Berikut adalah gambar status register.
24
• Bit 7(I)
Merupakan bit Global Interrupt Enable. Bit ini harus di-set agar semua perintah interupsi dapat dijalankan. Untuk perintah interupsi individual akan di jelaskan pada bagian yang lain. Jika bit ini di-reset, maka semua perintah interupsi baik yang individual maupun yang secara umum akan di abaikan. Bit ini akan dibersihkan atau cleared oleh hardware setelah sebuah interupsi di jalankan dan akan di-set kembali oleh perintah RETI. Bit ini juga dapat di- set dan di-reset melalui aplikasi dan intruksi SEI dan CLL.
• Bit 6(T)
Merupakan bit Copy Storage. Instruksi bit Copy Instructions BLD (Bit Load) and BST (Bit Store) menggunakan bit ini sebagai asal atau tujuan untuk bit yang telah dioperasikan. Sebuah bit dari sebuah register dalam Register File dapat disalin ke dalam bit ini dengan menggunakan instruksi BST, dan sebuah bit di dalam bit ini dapat disalin ke dalam bit di dalam register pada Register File dengan menggunakan perintah BLD.
• Bit 5(H)
Merupakan bit Half Carry Flag. Bit ini menandakan sebuah Half Carry dalam beberapa operasi aritmatika. Bit ini berfungsi dalam aritmatika BCD.
• Bit 4(S)
Merupakan Sign bit. Bit ini selalu merupakan sebuah ekslusif di antara Negative Flag (N) dan two’s Complement Overflow Flag (V).
• Bit 3(V)
Merupakan bit Two’s Complement Overflow Flag. Bit ini menyediakan fungsi aritmatika dua komplemen.
• Bit 2(N)
• Bit 1(Z)
Merupakan bit Zero Flag. Bit ini mengindikasikan sebuah jasil nol “0” dalan sebuah fungsi aritmatika atau logika.
• Bit 0(C)
Merupakan bit Carry Flag. Bit ini mengindikasikan sebuah Carry atau sisa dalam sebuah aritmatika atau logika.
2.3.11.Timer/Counter 0
Timer/counter 0 adalah sebuah timer/counter yang dapat mencacah sumber pulsa/clock baik dari dalam chip (timer) ataupun dari luar chip (counter) dengan kapasitas 8-bit atau 256 cacahan. Timer/counter dapat digunakan untuk :
1. Timer/counter biasa
2. Clear Timer on Compare Match (selain Atmega 8) 3. Generator frekuensi (selain Atmega 8)
4. Counter pulsa eksternal
2.3.12.Komunikasi Serial Pada Atmega 8
Komunikasi serial merupakan komnikasi yang relative lambat dibandingkan dengan komunikasi paralel. Oleh karena itu, komunikasi serial sering melibatkan interupsi untuk mengetahui apakah pengiriman mampu menerima data yang telah selesai atau yang belum selesai dikirim.
Metode yang paling aman untuk proses pengiriman dan penerimaan sata serial adalah dengan menyediakan buffer untuk kedua proses tersebut. Data yang akan dikirim tidak secara langsung diberikan kepada SBUF,melainkan diberikan kepada buffer. Demikian juga dengan pengambilan data yang tidak langsung dari SBUF, melainkan diambil dari buffer, perpindahan keduanya diserahkan kepada prosedur dalam intrupsi serial.
26
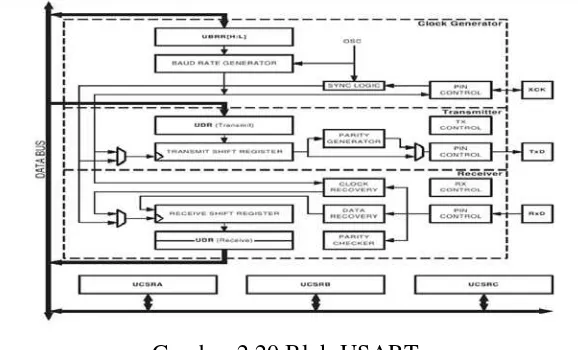
difungsikan sebagai transmisi data sinkron, dan asinkron. Sinkron berarti clock yang digunakan antara transmiter dan receiver satu sumber clock. Sedangkan asinkron berarti transmiter dab receiver mempunyai sumber clock sendiri-sendiri. USART terdiri dalm tiga blok yaitu clock generator, transmiter, dan receiver.
Gambar 2.20 Blok USART • Clock Generator
Clock generator berhubungan dengan kecepatan transfer data (baud rate), register yang bertugas menentukan baud rate adalah register pasangan. • USART transmiter
Usart transmiter berhubungan dengan data pada Pin TX. Perangkat yang sering digunakan seperti register UDR sebagi tempat penampungan data yang akan ditransmisikan. Flag TXC sebagai akibat dari data yang ditransmisikan telah sukses (complete), dan flag UDRE sebagai indikator jika UDR kosong dan siap untuk diisi data yang akan ditransmisikan lagi. • USART receiver
2.4. ANALOG TO DIGITAL CONVERTER ( ADC )
ADC adalah suatu alat yang mampu untuk mengubah sinyal atau tegangan analog menjadi informasi digital. Resolusi ADC selalu dinyatakan sebagai jumlah bit-bit dalam kode keluaran digitalnya. Misalnya, ADC dengan resolusi n-bit memiliki 2n kode digital yang mungkin dan berarti juga memiliki 2n step level. Jika resolusi ADC semakin tinggi, maka semakin banyak kemungkinan nilai-nilai analog yang bias disajikan. Misalnya ADC dengan resolusi 8 bit menghasilkan bilangan 0 sampai 255 ( 256 bilangan dan 255 step ), dengan demikian tidak mungkin menyajikan semua kemungkinan nilai-nilai analog. Jika sekarang resolusinya menjadi 10 bit maka akan menghasilkan bilangan 0 sampai dengan 1023 ( 1024 bilangan dan 1023 step ).
���� =������256�������� � ����
������������= �����
����� �
256
Fitur- fitur pada arsitektur ADC mikrokntroler AVR adalah sebagai berikut : • Resolusi maksimum 10 bit (dapat dipilih resolusi 8 bit)
• 0,5 LSB Integral Non Linearity • Akurasi mutlak ± 2 LSB • Waktu konversi 13 – 260 µs
• Pengambilan sampel sampai 15 kilo sampel per detik pada resolusi maksimum • 8 kanal masukan single ended termultipleks
• 7 kanal masukan differensial dan 2 kanal masukan differential dengan opsi penguatan 10x dan 200x
• Jangkauan tegangan masukan ADC 0 – VCC • Tegangan referensi 2,56 V internal yang dipilih • Mode konversi tunggal
28
dalam perancangan adalah jenis successive approximation convertion atau pendekatan bertingkat yang memiliki waktu konversi jauhlebih singkat dan tidak tergantung pada nilai masukan analognya atau sinyal yang akan diubah. Diagram blok pengubah sinyal analog ke dalam digital ditunjukkan pada gambar 2.21Berikut ini :
Konverter D/A 8 bit Register SAR
KENDALI
Gambar 2.21 Diagram blok ADC
Prinsip kerja rangkaian pada gambar 2.21 tersebut adalah jika sinyal masukan mulai konversi dari unit kendali diberi logika ‘0’ , maka register SAR (Succesive Approximation Register) akan direset. Sehingga keluaran Vout unit DAC (Digital to
Analog) menjadi nol. Pada waktu sinyal ‘mulai konversi’ kembali menjadi tinggi, operasi konversi segera dimulai.
Proses konversi diawali dengan pengesetan bit paling berarti (MSB) register SAR oleh kendali. Selanjutnya dta digital dalam register SAR dikonversi ke analog oleh DAC. Hasil konversi Voutoleh unit dibandingkan dengan sinyal masukan Vin
oleh unit pembanding. Bila Vout lebih besar dari pada Vin, maka unit pembanding
akan mengirimkan sinyal negatif ke unit kendali. Dengan adanya sinyal negatif ini, unit kendali akan mereset bit paling berarti (MSB) register SAR. Sebaliknya, jika Vout
lebih kecil dari pada Vin, unit pembanding akan mengirimkan sinyal positif ke unit
kendali. Dengan sinyal positif ini, unit kendali tetap mengeset bit paling berarti (MSB).
perbandingan akan menentukan unit kendali untuk mengeset dan mereset register SAR. Demikian proses ini berlangsung sampai diperoleh nilai Vin sama dengan nilai
Vout. Apabila konversi telah selesai, unit kendali mengirimkan sinyal ‘selesai
konversi’ yang berlogika rendah.
2.5. PEMROGRAMAN MIKROKONTROLER MENGGUNAKAN
CODE VISION AVR ( BAHASA C )
Penggunaan mikrokontroler yang diterapkan diberbagai rumah tangga,otomotif,sampai dengan kendali, membuat mikrokontroler mulai masuk didunia pendididkan. Banyak varian dan type dari mikrokontroler yang dipelajari dan digunakan di dunia pendidikan.
Akar dari bahas C adalah dari bahasa BCPL yang dikembangkan oleh Martin Richhards pada tahun 1967. Bahasa ini memberikan ide kepada Ken Thompson yang kemudian mengembangkan bahasa yang disebut dengan B pada tahun 1970. Perkembangan selanjutnya dari bahasa B adalah bahasa C oleh Dennis Ricthie sekitar 1970-an di Bell Telephone Laboratories Inc ( sekarang adalah AT & T Bell Laboratories ). Bahasa C pertama kali digunakan di computer Digital Equipment Corporation PDP-11 yang menggunakan sistem operasi UNIX.
C adalah bahasa yang standar, artinya satuan program yang ditulis dengan versi bahas C tertentu akan dapat dikoompilasi dengan versi bahasa C yang lain dengan sedikit modifikasi. Standar bahasa C yang asli adalah standar dari UNIX. Patokan standar UNIX ini diambil dari buku yang ditulis oleh Brian Kerninghan dan Dennis Ritehiie yang berjudul “The C Programming Language”,diterbitkan oleh Prentice Hall tahun 1978.
Beberapa alasan mengapa bahasa C banyak digunakan, diantaranya adalah sebagai berikut :
1. Bahasa C hamper tersedia di semua jenis computer.
30
2. Kode bahasa C sifatnya portable.
Aplikasi yang ditulis dengan bahasa C untuk suatu computer tersebut dapat digunakan di computer lain hanya dengan modifikasi yang sedikit saja.
3. Bahasa C hanya menyediakan sedikit kata-kata kunci.
Semakin sedikit kata-kata kunci yang digunakan disuatu bahasa, semakin mudah bagi pemakai untuk mempelajari dan menggunkan bahasa tersebut. 4. Proses executable program bahasa C lebih cepat.
Karena philosopi dari bahasa C yang menyediakan sedikit kata-kata kunci, maka konsekuensinya program hasil dari kompilasi bahasa C relative akan lebih cepat prosesnya dibandingkan dengan hasil dari bahasa lain. 5. Dukungan pustaka yang banyak.
Telah disebut bahwa keandalan bahasa C dicapai dengan fungsi-fungsi pustakanya. Fungsi-fungsi pustaka ini disediakan oleh versi-versi bahasa C masing-masing atau dapat dibeli dari sumber yang lain.
6. C adalah bahasa yang tersruktur.
Bahasa C mempunyai struktur yang baik sehingga mudah untuk dipahami. C disebut bahasa yang terstruktur karena menggunakan fungsi-fungsi sebagai program-program bagiannya.
7. Selain bahasa tingkat tinggi, C juga dianggap sebagai bahasa tingkat menengah.
8. Bahasa C adalah compiler.
Karena bahasa C sifatnya adalah compiler, maka akan menghasilkan executable program yang banyak dibutuhkan oleh program-program komersial.
Ada beberapa program yang dapat digunakan sebagai editor dan compiler untuk mikrokontroler AVR, salah satunya yaitu CodeVision. CodeVision AVR adalah salah satu alat bantu pemrograman yang bekerja dalam lingkungan pengembangan perangkat lunak yang terintegrasi. Code vision AVR ini merupakan cross-compiler C, Integrated Development Environtment (IDE), dan Automatic Program Generator yang didesain untuk mikrokontroler buatan Atmel seri AVR. Cross-compiler C mampu menerjemahkan hamper semua perintah dari bahasa ANSI C, sejauh yang diijinkan oleh arsitektur dari AVR, dengan tambahan beberapa fitur untuk mengambil kelebihan khusus dari arsitektur AVR dan kebutuhan dari sistem embedded.
CodeVisionAVR juga mempunyai Automatic Program Generator bernama CodeWizardAVR, yang mengizinkan anda untu menulis, dalam hitungan menit, semua instruksi yang diperlukan untuk membuat beberapa fungsi-fungsi tertentu. Dengan fasilitas ini mempermudah para Programmer pemula untuk belajar pemograman mikrokontroler menggunakan CVAVR. Seperti aplikasi IDE lainnya, CodeVision AVR dilengkapi dengan source code editor, compiler, linker, dan dapat memanggil Atmel AVR Studio untuk debugger nya.
32
Gambar 2. 22 Tampilan Pertama Kali CodeVision dijalankan
2.6. SOFTWARE DESAIN PCB ( Printed Circuit Board ) Proteus
Profesional 7.7 SP2 Pro
Proteus professional merupakan kelompok software yang digunakan untuk membantu para desainer dalam merancang dan mensimulasikan suatu rangkaian elektronika. Software ini memiliki dua fungsi sekaligus dalam satu paket, paket yang pertama sebagai software untuk menggambar skematik dan dapat disimulasikan yang diberi nama ISIS. Paket kedua digunakan sebagai merancang gambar Printed Circuits Board (PCB) yang diberi nama ARES. Secara langsung, pengubahan dari skematik ke PCB dapat dilakukan dalam software Proteus Prof 7.7 ini.
dengan kelengkapan komponen, juga didukung dengan kelengkapan alat ukur seperti volumeter, Ampere meter, Oscilloscope, Signal Analyzers, serta pembangkit Frekuensi. Kelengkapan fitur yang disediakan ini menjadi Proteus Prof ISIS menjadi satu software simulasi elektronik terbaik.
2.6.1. Fungsi Tiap Fitur Proteus Prof 7.7
Tampilan window Proteus Profesional ISIS 7 seperti dibawah ini, dan memiliki fungsi difitur-fitur nya yang sering digunakan sebagai berikut :
Gambar 2.23 Tampilan window Proteus Profesional 7.7 Tabel 2.3 Nama-Nama Fitur Proteus Profesional dan Kegunaannya
Nama Fitur Kegunaan
Menu Bar
Merupakan list menu yang dapat digunakan dalam perancangan atau pengolahan gambar rangkaian.
Open Save Data New File
Open File Save
Membuat file baru dengan area gambar baru.
Membuka file yang pernah disimpan. Manyimpan file yang telah dibuat.
Togle Grid Menampilkan bantuan titik-titik
34
Center at Cursor Zoom in
Zoom out
Zoom to view sheet Zoom to area
Membuat area tengah tampilan gambar dengan bertumpu pada cursor. Memperbesar gambar.
Memperkecil gambar.
Menampilkan keseluruhan gambar dalam layar monitor.
Memperbesar gambar dengan memilih area yang dikehendaki.
Mini view Menampilkan gambar dalam bentuk
tampilan kecil seluruh area gambar.
Component List Daftar komponen yang telah diambil
dari library. Pick From Library
Mengambil komponen pada library yang akan diletakkan pada component list.
Componen Mode Meliputi Selection mode
Virtual Instrument Mode
Memilih dan melakukan aksi pada komponen yang dipilih.
Mengambil komponen pada library.
Mengambil dan menggunakan terminal yang dibutuhkan dalam rangkaian (VCC,Gnd,Input,Output). Memilih pembangkit pulsa yang akan digunakan.
Terminal dengan tampilan nilai dari jalur koneksi komponen dengan menampillkan besaran tegangan.
Terminal dengan tampilan nillai dari jalur koneksi komponen dengan menampilkan besaran arus.
Mengambil alat ukur yang akan digunakan (CRO,Voltmeter,Ampere meter, AFG, Signal Analyyzer).
Drawing Tool and Text meliputi 2D Graphic line Mode
2D Graphic box Mode 2D Graphic Circle Mode 2D Graphic Arc Mode 2D Graphic Text Mode
Membuat garis jalur rangkaian 2D Membuat gambar kotak atau persegi 2D pada area gambar.
Membuat gambar lingkaran 2D pada area gambar.
Membuat gambar Arc atau garis lengkung 2D pada area gambar.
Rotate And Mirror Rotate Clockwise Rotate Anticlockwise X mirror
Y mirror
Merotasi obyek searah jarum jam. Merotasi obyek berlawanan dengan arah jarum jam.
Mencerminkan obyek kearah X Mencerminkan obyek kearah Y Play and Simulation Operation
Play Step Pause Stop
Menjalankan simulasi rangkaian yang telah dibuat.
Menjalankan simulasi secara tahap pertahap.
BAB 3
PERANCANGAN ALAT
3.1. PRINSIP KERJA SISTEM
Prinsip kerja sistem keseluruhan adalah dimulai dari menangkap intensitas cahaya oleh rangkaian sensor cahaya (LDR). Intensitas cahaya tersebut kemudian diubah oleh rangkaian LDR menjadi tegangan. Tegangan yang dihasilkan oleh rangkaian sensor LDR masih bersifat analog. Oleh karena itu agar tegangan tersebut dapat diproses secara digital dengan mikrokontroler, maka tegangan tersebut harus diubah terlebih dahulu ke digital. Perangkat converter analog ke digital (Analog to Digital Converter) ADC, berfungsi untuk mengubah tegangan analog keluaran rangkaian sensor LDR menjadi data digital. Data digital keluaran dari perangkat ADC kemudian diproses di dalam mikrokontroler dan dikalibrasi untuk kemudian ditampilakan pada layar tampilan LCD.
3.1.1.Blok Diagram dan Fungsinya
Secara keseluruhan, sistem untuk mengukur besarnya intensitas cahaya tampak ini terdiri dari beberapa bagian yang digambarkan menjadi blok diagram pada gambar 3.1 berikut ini
Rangkaian Sensor Cahaya LDR
Mikrokontroler
Saklar Untuk Mengaktifkan
Sistem
ADC Counting
Indikator Led
Display
Secara keseluruhan sistem terdiri dari lima bagian yaitu sensor cahaya LDR, input saklar, mikrontroler, display LCD dan indicator LED untuk menunjukkan kesiapan.
1) Rangkaian sensor cahaya LDR
Rangkaian sensor ini digunakan untuk menangkap perubahan intensitas cahaya menjadi tegangan.
2) Mikrokontroler
Mikrokontroler yang digunakan adalah mikrokontroler atmega 8 yang akan melakukan proses pengolahan data,perhitungan data, kalibrasi dan mengubah tegangan analaog keluaran dari rangkaian sensor menjadi digital 8 bit melalui ADC yang akan di kirim pada layar LCD.
3) Input saklar
Input saklar adalah saklar yang digunakan untuk mengaktifkan mikrokontroler.
4) Sirkit Display LCD
Sikrit Dispay LCD berfungsi untuk menampilkan informasi pengukuran kepada pengguna. LDC yang digunakan adalah LCD tipe M1632, terdiri dari dua baris dan masing-masing berdiri terdiri dari 16 karakter ( biasanya dikenal dengan LCD 16x2). Tiap karakter berukuran 5 x 7 dot matrix.
5) Indikator LED
Indikator LED berfungsi sebagai indikasi bahwa sistem sudah siap beroperasi.
3.2. PERANGKAT KERAS
Sirkuit perangkat keras secara keseluruhan dibuat dengan menggunakan komponen-komponen sesuai dengan fungsi dari blok-blok sistem yang digambarkan pada gambar 3.1. Gambar 3.2 menunjukkan skematik diagram perangkat keras sistem.
3.2.1. Rangkaian sensor cahaya LDR
38
perubahan intensitas cahaya, dengan bahan ini energi cahaya yang jatuh pada LDR menyebabkan lebih banyak muatan yang dilepas sehingga resistansi bahan mengalami penurunan. Nilai resistansi LDR yang digunakan berada pada antara 150 A (bila mendapatkan cahaya maksimum) samapai 20mA (bila tidak mendapat cahaya), sehingga besarnya nilai resistansi R3 yang digunakan sebagai konfigurasi rangkaian pembagi tegangan harus memiliki nilai lebih besar dari pada resistansi LDR pada waktu mendapat cahaya maksimum dan memiliki resistansi lebih kecil saat LDR tidak mendapatkan cahaya. Oleh karena itu, resistansi R3 sebesar 10 K dapat digunakan sebagai konfigurasi rangkaian sensor cahaya.
Gambar 3.2 Skematik diagram perangkat keras sistem
3.2.2. Mikrokontroler
Mikrokontroler yang digunakan adalah ATMEGA 8 produksi ATMEL yang memiliki 8 bit terminal I/O, dengan menggunakan Kristal sebesar 12.000000 Hz maka akan memberikan kecepatan satu siklus mesin (Machine Cycle) sebesar 9,99µ s.
1 MC = 12 ��
= 12 � 1 12.000 .000 ��
= 9,99 � 10−6�
3.2.3. Saklar
Saklar yang digunaka adalah saklar tekan yang berfungsi untuk mengaktifkan mikrokontroler.
3.2.4. Sirkit display LCD
LCD adalah suatu display dari bahan cairan kristal yang pengobrasiannya menggunakan sistem dot matriks. LCD banyak digunakan sebagai display alat-alat elektronika seperti kalkulator, multitester digital, jam digital dan sebagainya.
Gambar 3.3 LCD 2x16 karakter
Mikrokontroler
Gambar 3.4 Blok diagram LCD
LCD dapat dengan mudah dihubungkan dengan mikrokontroler AVR ATmega 8. LCD yang digunakan dalam percobaan adalah LCD 2 x 16, lebar display 2 baris 16 kolom, yang mempunyai 16 pin konektor yang didefinisikan sebagai berikut :
Tabel 3.1 Pin LCD dan Fungsinya
PIN Nama PIN Fungsi
1 VSS Ground voltage
2 VCC +5V
40
4 RS
Register select
0 = Instruction Resister 1 = Data Register
5 R/W
Read Write, to chose write or read mode
ADC berfungsi untuk mengubah tegangan analog keluaran dari rangkaian sensor menjadi data digital 8 bit. ADC memiliki generator clock internal yang harus diaktifkan dengan menghubungkan sebuah resistor eksternal serta sebuah kapasitor eksternal.
3.3. PERANGKAT LUNAK
Algoritma pemrosesan data keseluruuhan menggunakan mikrokontroler dapat digambarkan pada gambar 3.5 Diagram aliran program mikrokontroler.
Mulai
stand by menyala
Pilih ruangan yang akan di tes
stand by menyala
Pengukuran
Tidak Tidak Tidak Tidak
Tidak
Ya Ya Ya Ya
Ya
Indikator supply daya
Saklar supply daya
Dispay LCD
Sensor LDR
Rangkaian Penguat
Op-Am
Rangkaian Regulator
Supply daya
Mikrokontroler
BAB 4
PENGUJIAN DAN ANALISA SISTEM
4.1. HASIL RANCANGAN BANGUN
Berdasarkan rancangan bangun pada Bab 3, maka dibuatlah system secara keseluruhan, dan hasilnya pada gambar 4.1 memperihatkan perangkat keras dari bagian luar dan gambar 4.2 memperlihatkan perangkat keras bagian dalam.
Gambar 4.1 Perangkat Keras dari bagian luar
4.2. KOEFISIEN KALIBRASI
Lux Meter Digital Standar adalah alat yang dapat mengukur intensitas cahaya, ini merupakan alat yang digunakan untuk membandingkan alat ukur intensitas cahaya yang telah dibuat.
Suatu database berisi informasi tentang spesifikasi dan karakteristik produk. Untuk dapat memperoleh koefisien kalibrasi, maka dilakukan suatu pengetesan pada cahaya lampu. Pengetesan dilakukan dengan cara membandingkan lux meter standar dengan lux meter yang telah dibuat, mencatat hasil yang tertera pada pada layar LCD. Banyaknya fluks cahaya yang terukur yang merupakan data biner keluaran dari ADC yang telah didekodekan menjadi data decimal ( keluaran ADC ). Pengukuran dilakukan dibeberapa ruangan, dari mulai ruangan yang tidak mendapatkan cahaya sampai ruangan yang mempunyai intensitas cahaya tinggi. Berikut ini merupakan tabel dan grafik hasil pengettesan untuk memperoleh koefisien kalibrasi pada masing-masing ruangan.
Tabel 4.1 Data Koefisien Kalibrasi
Ruangan Lux Meter Standar Lux Meter Uji
1 432 436
2 442 452
3 442 448
4 439 445
44
Gambar 4.3 Grafik Lux Meter Standar Vs Lux Meter Uji
4.3. PENGKALIBRASIAN ALAT
Pengkalibrasian sistem diperlukan agar mendapatkan hasil sesuai dengan yang diharapkan. Pengkalibrasian dilakukan dengan menggunakan lux meter standar. Keluaran lampu adalah fluk cahaya, sedangkan yang ditampilkan pada alat ukur adalah daya dari fluk cahaya yang dihasilkan oleh lampu, dalam hal ini satuannya lux. Pengkalibrasian alat ukur dimulai dengan melakukan percobaan untuk mendapatkan koefisien kalibrasi. Setelah besarnya koefisien kalibrasi diketahui, selanjutnya adalah memprogram mikrokontroler agar daya fluks cahaya yang dihasilkan oleh lampu (keluaran ADC) sama dengan daya lampu pada saat percobaan untuk memperoleh koefisien kalibrasi dan hasilnya ditampilkan pada layar tampil LCD. Pengkalibrasian dilakukan untuk masing-masing lampu pada ruangan.
Metode program pengkalibrasian yang digunakan pada mikrokontroler menggunakan sistem look up table yaitu dengan terlebih dahulu membangun database. Database diperoleh dengan cara setiap data biner keluaran ADC, yang telah didekodekan menjadi decimal (0 sampai 255), dikalikan dengan koefisien kalibrasi.
420 425 430 435 440 445 450 455
1 2 3 4 5
Lux Meter Standar
Program pada mikrokontroler dibuat agar setiap intensitas cahaya yang terdeteksi oleh sensor akan menunjuk ke suatu data yang disimpan.
4.4. PENGUKURAN INTENSITAS CAHAYA
Pada sistem yang sudah dibuat kemudian dilakukan pengujian untuk mengukur intensitas cahaya tiap ruangan. Pengukuran dilakukan dengan cara menempelkan sumber cahaya secara garis lurus dengan sensor cahaya. Pengukuran bertujuan untuk mengetahui bahwa proses pengkalibrasian telah berhasil. Selain itu pengukuran dengan mengerak-gerakkan sensor cahaya menjauh dan mendekati cahaya bertujuan untuk mengetahui tingkat kesenstitifan sensor cahaya.
Tabel 4.2 sampai tabel 4.6 dan gambar 4.4 sampai gambar 4.8 berikut ini adalah tabel dan grafik hasil pengukuran intensitas cahaya yang dilakukan pada ruangan Laboratorium Fisika Dasar ( LIDA ).
Tabel 4.2 Data Pengujian Pertama
Ruangan Lux Meter Standar Lux Meter Uji Ruang I
1 424 437
2 412 438
3 431 437
4 431 435
46
Gambar 4.4 Grafik Lux Meter Standar Vs Lux Meter Uji Pengukuran Pertama
Tabel 4.3 Data Pengujian Kedua
Ruangan Lux Meter Standar Lux Meter Uji Ruang II
Tabel 4.4 Data Pengujian Ketiga
Ruangan Lux Meter Standar Lux Meter Uji Ruang III
1 484 461
2 469 460
3 468 459
4 481 460
5 495 459
Gambar 4.6 Grafik Lux Meter Standar Vs Lux Meter Uji Pengukuran Ketiga
Tabel 4.5 Data Pengujian Keempat
Ruangan Lux Meter Standar Lux Meter Uji Ruang IV
1 449 428
2 438 427
3 435 425
4 438 425
5 443 425
440 450 460 470 480 490 500
1 2 3 4 5
Lux Meter Standar
48
Gambar 4.7 Grafik Lux Meter Standar Vs Lux Meter Uji Pengukuran Empat
Tabel 4.6 Data Pengujian Kelima
Ruangan Lux Meter Standar Lux Meter Uji Ruang V
4.5. ANALISA SISTEM
Setelah dilakukan pengkalibrasian dan pengujian terhadap alat ukur intensitas cahaya, maka diperoleh suatu hasil yang menunjukkan bahwa metode kalibrasi look up table adalah cukup akurat, seperti yang terlihat pada tabel berikut :
% �����=���������������� − �����������
��������������� � � 100 %
Tabel 4.7 Tingkat Keakuratan Hasil Pengukuran
Ruangan Pengukuran Error (%)
Lux Meter Standar Lux Meter Uji
Kalibrasi 439 445.2 1.4
Ruangan I 426.4 436.8 2.4
Ruangan II 389.2 403 3.5
Ruangan III 479.4 459.8 4.0
Ruangan IV 440.6 426 3.3
Ruangan V 435.2 415.4 4.5
Ada banyak faktor yang mempengaruhi perbedaan antara hasil pengukuran yang diharapkan dengan hasil pengukuran yang terukur, diantaranya yaitu besarnya bit ADC yang digunakan, ketelitian pembacaan data pada saat percobaan untuk memperoleh koefisien kalibrasi dan banyaknya fluks cahaya yang dihasilkan berbeda ketika percobaan untuk memperoleh koefisien kalibrasi dengan fluks pasa saat pengujian alat ukur. Penggunaan komponen ADC dengan nilai bit yang besar akan menghasilkan pengukuran dengan tingkat keakuratan yang tinggi hal ini disebabkan karena ADC dengan nilai bit yang besar akan mempunyai resolusi pengukuran lebih kecil.
50
terdeteksi oleh sensor semakin kecil. Banyak sedikitnya cahaya yang mengenai sensor mempengaruhi banyak sedikitnya electron bebas dan hole yang terbentuk didalam material pembentuk sensor cahaya yang selanjutnya berpengaruh terhadap konduktifitas bahan.