i
TUGAS AKHIR
Disusun Oleh :
Nama : Eka Sari Oktarina
NIM : 11.41020.0033
Program : S1 (Strata Satu)
Jurusan : Sistem Komputer
FAKULTAS TEKNOLOGI DAN INFORMATIKA INSTITUT BISNIS DAN INFORMATIKA STIKOM
x
HALAMAN JUDUL ... i
HALAMAN SYARAT ... ii
MOTTO ... iii
HALAMAN PERSEMBAHAN ... iv
HALAMAN PENGESAHAN ... v
HALAMAN PERNYATAAN ... vi
ABSTRAK ... vii
KATA PENGANTAR ... viii
DAFTAR ISI ... x
DAFTAR GAMBAR ... xv
DAFTAR TABEL ... xxiv
BAB I PENDAHULUAN ... 1
1.1 Latar Belakang Masalah ... 1
1.2 Rumusan Masalah ... 2
1.3 Batasan Masalah ... 2
1.4 Tujuan ... 3
1.5Sistematika Penulisan ... 3
BAB II LANDASAN TEORI ... 5
xi
2.3 Arduino ... 9
2.3.1 Arduino Mega 2560 ... 10
2.4 Software Arduino IDE ... 15
2.5 Bahasa Pemrograman Arduino ... 17
2.6 Xbee ... 18
2.7 Xbee USB Adapter dan Software X-CTU ... 20
2.8 Visual Basic ... 21
2.9 Parameter QoS ... 23
BAB III METODE PENELITIAN DAN PERANCANGAN SISTEM ... 26
3.1.Metode Penelitian ... 26
3.2.Model Perancangan ... 27
3.3.Perancangan Sistem ... 29
3.4.Perancangan Perangkat Keras ... 30
3.4.1 Perancangan Sensor Jantung ... 30
3.4.2 Perancangan Rangkaian Xbee Zigbee S2B ... 31
3.4.3 Perancangan Rangkaian USB to Serial Xbee ... 31
3.4.4 Arduino 2560 ... 33
3.4.5 Xbee ... 34
3.4.6 Visual Basic ... 35
xii
3.5.3 Algoritma Penerimaan dan Pemisahan Data pada Router ... 45
3.5.4 Algoritma Penerimaan Data pada End Device (Real Time) ... 46
3.5.5 Algoritma Penerimaan Data pada End Device (Offline) ... 48
3.6.Metode Analisa ... 51
3.6.1 Peletakan Sensor pada Jantung ... 51
3.6.2 Pengambilan Sinyal Auskultasi Jantung ... 52
3.6.3 Analisa Transmisi Sinyal Auskultasi Jantung ... 53
BAB IV HASIL PENGUJIAN DAN PENGAMATAN ... 57
4.1.Pengujian Xbee ... 57
4.1.1. Tujuan ... 57
4.1.2. Alat yang Digunakan ... 57
4.1.3. Prosedur Pengujian ... 58
4.1.4. Hasil Pengujian ... 59
4.2.Pengujian Komunikasi Xbee ... 59
4.2.1 Tujuan ... 59
4.2.2 Alat yang Digunakan ... 59
4.2.3 Prosedur Pengujian ... 60
4.2.4 Hasil Pengujian ... 60
4.3 Pengujian Arduino ... 61
xiii
4.3.4 Hasil Pengujian ... 63
4.4 Pengujian Tampilan Penerimaan Data pada Router ... 64
4.4.1 Tujuan ... 64
4.4.2 Alat yang Digunakan ... 64
4.4.3 Prosedur Pengujian ... 65
4.4.4 Hasil Pengujian ... 66
4.5 Pengujian Tampilan Penerimaan Data pada Coordinator ... 67
4.5.1 Tujuan ... 67
4.5.2 Alat yang Digunakan ... 68
4.5.3 Prosedur Pengujian ... 68
4.5.4 Hasil Pengujian ... 69
4.6 Pengujian Sistem ... 71
4.6.1 Tujuan ... 71
4.6.2 Alat yang Digunakan ... 71
4.6.3 Prosedur Pengujian ... 72
4.6.4 Hasil Pengujian ... 73
4.7 Hasil Analisa Keseluruhan Sistem ... 122
BAB V PENUTUP ... 125
5.1.Kesimpulan ... 125
xiv
1 1.1 Latar Belakang Masalah
Penyakit jantung dapat dialami oleh siapa saja dan terkadang tidak dapat
di deteksi. Untuk mencegah terjadinya penyakit jantung sebaiknya melakukan
pemeriksaan yang dilakukan oleh dokter ahli. Proses pemeriksaan yang dilakukan
oleh dokter ahli disebut auskultasi (Puspasari, 2013). Auskultasi adalah
pemeriksaan kinerja organ tubuh seperti jantung dengan cara mendengarkan suara
yang di akibatkan oleh vibrasi yang berasal dari proses kerja jantung. Stetoskop
merupakan alat yang digunakan pada proses pemeriksaan auskultasi. Pemeriksaan
fisik pada pasien mewajibkan pasien membuka area tubuh pasien yang akan
diperiksa, yaitu pada bagian dada Karena itu tidak setiap dokter dapat melakukan
pemeriksaan fisik secara langsung terhadap semua pasien yang berbeda gender
demi menjaga kenyamanan dan privacy pasien. Maka dari itu diperlukan ruangan
tersendiri antara ruangan dokter dengan ruangan pemeriksaan fisik. Agar pasien
laki – laki dapat diperiksa oleh perawat laki – laki dan pasien wanita dapat dirawat
oleh perawat wanita. Hal ini seudah bisa diatasi dengan penelitian sebelumnya
yang telah berhasil mentransmisikan hasil askultasi sinyal jantung dari satu node
ke nodecoordinator. Hasil penelitian tersebut berhasil dilakukan dengan toleransi
kesalahan sebanyak lebih kurang 13,06% untuk periode sampling 5ms ( Jusak,
2014)
Permasalahan lain adalah ketika terdapat banyak pasien yang ingin
bersamaan dengan tujuan untuk mempersingkat waktu pemeriksaan. Sementara
saat ini pemeriksaan fisik pada beberapa pasien tidak dapat dilakukan secara
bersamaan. Dengan demikian diperlukan pentransmisian sinyal auskultasi dari
beberapa pemeriksaan sinyal jantung pasien sekaligus yang berada pada ruangan
pemeriksaan yang berbeda ke ruangan dokter. Agar dokter dapat sekaligus
memeriksa kedua pasien secara bersamaan.
Dari permasalahan diatas maka dibuatlah Transmisi Nirkabel Sinyal
Auskultasi Suara Jantung menggunakan Wireless Sensor Network. Perancangan
ini dibuat agar dokter dapat mengetahui kondisi jantung dari pasien tanpa
melakukan pemeriksaan fisik secara langsung dan dokter dapat memeriksa
keadaan jantung pasien dari 2 node atau lebih secara bersamaan dengan tepat dan
tidak tertukar.
1.2 Rumusan Masalah
Berdasarkan latar belakang diatas maka dapat dirumuskan permasalahan:
1. Bagaimana mentransmisikan hasil auskultasi data analog dari 2 node
secara streaming dan bersama – sama ke 1 titik melalui wireless zigbee
network?
2. Bagaimana melakukan pengujian terhadap unjuk kerja jaringan dengan
menggunakan perhitungan utilisasi bandwidth, delay transmisi, &
probability of loss?
1.3 Batasan Masalah
Untuk menghindari pembahasan yang lebih luas terkait dengan transmisi
network. Terdapat beberapa batasan masalah, maka penelitian ini hanya
ditentukan pada rung lingkup tertentu antara lain:
1. Acuan penelitian ini adalah kondisi jantung normal.
2. Topologi yang digunakan sudah ditentukan, yaitu dengan melakukan
pentransmisian hasil sinyal auskultasi dari 2 node sensor kepada 1 node
coordinator yang akan dibaca oleh sebuah end device.
1.4 Tujuan
Berdasarkan rumusan masalah yang diuraikan diatas, maka tujuan
penelitian ini adalah sebagai berikut :
1. Mentransmisikan hasil auskultasi yang berupa data analog secara
streaming melalui wireless zigbee network.
2. Mengirimkan hasil auskultasi dari 2 node secara bersamaan dengan
meminimalkan kesalahan.
1.5 Sistematika Penulisan
Pembahasan Tugas Akhir ini secara Garis besar tersusun dari 5 (lima)
bab, yaitu diuraikan sebagai berikut:
1. BAB I PENDAHULUAN
Pada Bab ini akan dibahas mengenai latar belakang masalah,
batasan masalah, tujuan penulisan, dan sistematika penulisan.
2. BAB II LANDASAN TEORI
Pada Bab ini akan dibahas teori penunjang dari permasalahan,
ZigBee (Xbee series 2) mode AT, software X-CTU, parameter Qos, dan
Visual Basic.
3. BAB III METODE PENELITIAN DAN PERANCANGAN SISTEM
Pada Bab ini akan dibahas tentang blog diagram sistem serta
metode yang dilakukan dalam trnasmisi sinyal auskultasi jantung,
meliputi cara pembuatan algoritma pengiriman dan pemisahan data dari
dua node router ke satu coordiator, skrip pada software arduino IDE
untuk komunikasi antara Xbee router sampai coordinator, konfigurasi
Xbee series 2 dalam mode AT pada software X-CTU, flow cart software
visual basic untuk menampilkan data yang diterima oleh Xbee
coordinator, cara pengambilan data sinyal auskultasi, dan cara
menentukan hasil dari parameter Qos.
4. BAB IV HASIL DAN PEMBAHASAN
Pada Bab ini akan dibahas mengenai hasil yang diperoleh dari
proses pengiriman dari dua node router sampai ke node coordinator.
Data tersebut kemudian akan dianalisa kemampuan unjuk kerja
jaringannya. Parameter – parameter yang akan dianalisa adalah,
probability of loss, delay dan bandwidth selama proses transmisi sinyal
auskultasi berlangsung.
5. BAB V KESIMPULAN DAN SARAN
Berisi kesimpulan yang didapat dari hasil penelitian berdasarkan
5
2.1 Wireless sensor network
Wireless sensor network (jaringan sensor nirkabel) terbentuk dari
kumpulan titik - titik sensor yang sangat banyak yang bersifat individu dan
tersebar tidak beraturan dalam suatu area yang disebut sensor field, yang
diletakkan dibeberapa tempat untuk memonitoring kondisi suatu tempat dan dapat
berinteraksi dengan lingkungannya dengan cara sensing, controlling dan
comunnication terhadap parameter – parameter fisiknya.
Gambar 2.1 Arsitektur WSN
Sumber : (http://digilib.tes.telkomuniversity.ac.id)
Tiap node sensor memiliki kemampuan untuk mengumpulkan data dan
berkomunikasi dengan node sensor lainnya. Peletakan titik-titik node sensor tidak
perlu direkayasa sedemikian rupa atau ditetapkan sebelumnya (fixed). Data yang
sink node yang merupakan penghubung antara node dengan user. Informasi
tersebut dapat diakses melalui berbagai platform seperti koneksi satelit sehingga
memungkinkan user untuk mengakses secara realtime melalui remote server.
(Sugiarto, & Sakti, 2009)
Setiap node dalam WSN (Wireless Sensor Network) terdiri dari lima
komponen, yaitu kontroler / mikrokontroler, memori, sensor / aktuator,
perangakat komunikasi dan catu daya. Komponen – komponen dari sebuah node
ditunjukkan pada gambar 2.2 dibawah ini.
Gambar 2.2 Komponen – komponen penyusun Node dalam WSN (Wireless Sensor Network)
Sumber : (Sugiarto, & Sakti, 2009)
a. Communication Device
Berfungsi untuk menerima / mengirim data dengan menggunakan
protokol IEEE 802.15.4 atau IEEE 802.11 b/g kepada device atau node
lainnya.
Communication Device
Controller Sensor / Actuator
b. Microcontroller
Berfungsi untuk melakukan fungsi perhitungan, mengontrol dan
memproses device – device yang terhubung dengan mikrokontroler.
c. Sensor
Berfungsi untuk men-sensing besaran – besaran fisis yang hendak diukur.
Sensor adalah suatu alat yang mampu untuk mengubah suatu bentuk
energi ke bentuk energi lain, dalam hal ini mengubah energi yang diukur
menjadi energi listrik yang kemudian diubah oleh ADC (Analog to
Digital Converter) menjadi deretan pulsa terkuantisi yang kemudian bisa
dibaca oleh mikrokontroler.
d. Memory
Berfungsi sebagai bahan tambahan memori bagi sistem wireless sensor.
e. Power Supply
Berfungsi sebagi sumber energi bagi sistem Wireless Sensor secara
keseluruhan. (Nugroho, 2014)
2.2 Zigbee
ZigBee adalah spesifikasi untuk jaringan protokol komunikasi tingkat
tinggi, menggunakan radio digital berukuran kecil dengan daya rendah, dan
berbasis pada standar IEEE (Institute of Electrical and ElectronicsEngineers)
802.15.4-2003 untuk jaringan personal nirkabel tingkat rendah, seperti saklar
lampu nirkabel dengan lampu, alat pengukur listrik dengan inovasi In-Home
Display (IHD), serta perangkat - perangkat elektronik konsumen lainnya yang
Teknologi yang memenuhi spesifikasi dari ZigBee adalah perangkat
dengan pengoperasian yang mudah, sederhana, membutuhkan daya sangat rendah
serta biaya yang murah jika dibandingkan dengan WPANs (Wireless Personal
Area Networks) lainnya, yakni Bluetooth. ZigBee fokus pada aplikasi Radio
Frequency (RF) yang membutuhkan data tingkat rendah, baterai tahan lama, serta
jaringan yang aman (Faludi, 2011).
2.2.1 Topologi Jaringan Zigbee
Zigbee memiliki beberapa topology secara umum diantantaranya adalah :
a. Pair
Topology pair adalah topology yang terdiri dari 2 node. Salah satu
berupa koordinator dan yang lain berupa router atau end device.
b. Star
Topology star adalah topology yang memiliki koordinator yang
berada di tengah dari topology star yang terhubung melingkar dengan end
device. Setiap data yang lewat selalu melalui koodinator terlebih dahulu.
End device tidak dapat berkomunikasi secara langsung.
c. Mesh
Topology mesh menugaskan setiap router sebagai koordinator
radio. Radio dapat melewatkan pesan melalui router dan end device sesuai
dengan kebutuhan. Koordinator bekerja untuk memanajemen jaringan.
Dapat berupa pesan rute. Berbagai macam end device dapat ditambahkan
informasi, tapi masih membutuhkan bantuan “parent’s” untuk dapat berkomunikasi dengan node yang lain.
d. Cluster Tree
Topology cluster tree menjadikan router sebagai backbone dan
setiap router terdapat end device yang mengililinginya. Konfigurasinya tidak
jauh beda dengan topologi mesh.
Gambar 2.3Topology zigbee pair, star, mesh dan cluster tree
Sumber : (Faludi, 2011)
2.3 Arduino
Arduino adalah prototipe platform elektroonik opensource yang terdiri
mikrokontroler, bahasa pemrograman, dan IDE (Integrated Development
Environment). Arduino adalah alat untuk membuat aplikasi interaktif, yang
dirancang untuk mempermudah proyek bagi pemula, tapi masih fleksibel bagi
2.3.1 Arduino Mega 2560
Arduino mega 2560 adalah papan mikrokontroler berdasarkan
ATmega2560 (datasheet). Ini memiliki 54 digital pin input / output (pin 15 dapat
digunakan sebagai output PWM (Pulse Width Modulation)) , 16 analog input , 4
UART (Universal Asyncronous Receiver Transmitter) (hardware port serial) ,
osilator kristal 16 MHz , koneksi USB , jack listrik , header ICSP (In-Circuit
Serial Programming) , dan tombol reset. Semuanya diperlukan untuk mendukung
kerja mikrokontroler, cara mengaktifkan Arduino mega 2560 adalah dengan
menghubungkannya ke komputer dengan kabel USB atau memberikan power
dengan adaptor AC - DC atau baterai. Arduino Mega ini compatible dengan
Arduino Duemilanove atau Diecimila.
Mega 2560 adalah update dari Arduino Mega. Mega 2560 berbeda dari
semua board sebelumnya yang tidak menggunakan FTDI (Future Technology
Devices International) chip driver USB - to -serial. Revisi ke 2 dari board Mega
2560 memiliki resistor 8U2, sehingga lebih mudah untuk dimasukkan ke dalam
mode DFU (Device Firmware Update).
Revisi 3 dari board Mega 2560 memiliki fitur-fitur baru berikut :
- 1.0 pinout : menambahkan SDA (Shouldbe Dhe Ather) dan pin SCL
(Simply Connect Last) yang dekat dengan pin AREF dan dua pin baru
lainnya ditempatkan dekat dengan pin RESET , IOREF yang
memungkinkan shield untuk beradaptasi dengan tegangan yang tersedia
dari board. Nantinya , shield akan compatible baik dengan board yang
5V dan dengan Arduino Due yang beroperasi dengan 3.3V. Yang kedua
adalah pin tidak terhubung , yang disediakan untuk tujuan lainnya.
- Sirkuit RESET kuat .
- Atmega 16U2 menggantikan 8U. (Arduino.cc)
Gambar 2.4 Arduino Mega 2560 Sisi Depan (Kiri) dan Belakang(Kanan) Sumber : (arduino.cc)
Secara umum arduino terdiri dari dua bagian, yaitu:
1. Hardware: papan input/output (I/O)
2. Software: software arduino meliputi IDE untuk menulis program, driver
untuk koneksi dengan komputer, contoh program dan library untuk
pengembangan program. (Djuandi, 2011)
Berikut adalah Tabel 1 spesifikasi dari arduino mega 2560.
Tabel 2.1 Spesifikasi Arduino Mega 2560
Mikrokontroler ATMega 2560
Tegangan Operasi 5V
Input tegangan(rekomendasi) 7 – 12V
Input tegangan (Maksimal) 6 – 20V
Digital I/O Pin 54 (15 pin PWM)
1. Daya (Power)
Arduino mega dapat diaktifkan melalui koneksi USB atau dengan catu
daya eksternal. Sumber daya dipilih secara otomatis. Eksternal ( non - USB ) daya
dapat berasal baik dari adaptor AC - DC atau baterai. Adaptor ini dapat
dihubungkan dengan menancapkan plug 2.1mm pusat - positif ke colokan listrik
board. Baterai dapat dimasukkan dalam Gnd dan Vin pin header dari konektor
daya.
Board dapat beroperasi pada pasokan eksternal 6 sampai 20 volt. Jika
tegangan dengan kurang dari 7V , tegangan pada board kemungkinan akan tidak
stabil. Jika menggunakan lebih dari 12V , regulator tegangan bisa panas dan
merusak board. Kisaran yang disarankan adalah 7 sampai 12 volt .
Pin listrik adalah sebagai berikut :
VIN : Tegangan input ke board Arduino ketika itu menggunakan sumber
daya eksternal ( ebagai lawan 5 volt dari koneksi USB atau sumber
daya diatur lain). Kita dapat memasok tegangan melalui pin ini.
5V : Pin output 5V diatur dari regulator di board. Board dapat
diaktifkan dengan daya baik dari colokan listrik DC (7 - 12V) ,
konektor USB (5V) , atau pin VIN dari board (7-12V). Jika
DC current per I/O Pin 40mA
Pin DC Current untuk 3.3V 50Ma
Memori flash 256Kb, 8Kb digunakan untuk
bootloader
SRAM 8Kb
EEPROM 4Kb
tegangan diberika melalui 5V atau 3.3V melewati regulator , dan
dapat merusak board, maka tidak disrankan.
3V3 : Sebuah pasokan 3,3 volt dihasilkan oleh regulator on-board yang
dapat menarik arus maksimum 50 mA.
GND : Pin tanah.
IOREF : Pin pada board Arduino memberikan tegangan referensi saat
mikrokontroler sedang beroperasi. Sebuah shield dikonfigurasi
dengan benar agar dapat membaca pin tegangan IOREF dan
memilih sumber daya yang tepat atau mengaktifkan penerjemah
tegangan pada output untuk bekerja dengan 5V atau 3.3V.
(arduino.cc)
2. Memori
ATmega2560 memiliki 256 KB dari flash memory untuk menyimpan
kode (8 KB digunakan untuk bootloader) , 8 KB SRAM dan 4 KB EEPROM (
yang dapat dibaca dan ditulis dengan library EEPROM ).(Arduino.cc)
3. Input dan Output
Masing-masing dari 54 digital pin (pin header) pada Mega dapat
digunakan sebagai input atau output, dengan menggunakan fungsi dari pinMode(
), digitalWrite( ), dan digitalRead( ). Mereka beroperasi pada tegangan 5V. Setiap
pin dapat memberikan atau menerima maksimum 40 mA dan memiliki resistor
pull-up internal yang (terputus secara default) dari 20-50 KOhms. Selain itu,
Serial : 0(RX) dan 1(TX); Serial 1 : 19(RX) dan 18(TX) ; Serial 2 : 17(RX) dan 16 (TX) ; Serial 3 : 15 (RX) dan 14(TX). Yang digunakan untuk
menerima (RX) dan mengirimkan (TX) TTL data serial. Pin 0 dan 1
juga terhubung ke pin yang sesuai dari ATmega16U2 USB - to- TTL
chip Serial. Letak PIN serial dapat dilihat pada gambar 2.25.
Eksternal Interupsi: 2 (interrupt 0) , 3 (interrupt 1) , 18 (interrupt 5) , 19 (interrupt 4) , 20 (interrupt 3) , dan 21 (interrupt 2). Pin ini dapat
dikonfigurasi untuk memicu interrupt pada nilai yang rendah, naik
atau jatuh tepi, atau perubahan nilai. Lihat AttachInterrupt( ) fungsi
untuk rincian. Letak PIN interupsi dapat dilihat pada gambar 2.25.
PWM: Pin 2-13 dan 44 sampai 46. Menyediakan 8 - bit PWM output dengan
analogWrite ( ) function. Letak PIN PWM dapat dilihat pada gambar
2.25.
SPI (Serial Peripheral Intervace) : 50(MISO), 51(MOSI), 52(SCK), 53(SS).
Pin ini mendukung komunikasi SPI menggunakan library SPI. Pin SPI
juga pecah pada header ICSP, yang secara fisik kompatibel dengan
Uno , Duemilanove dan Diecimila. Letak PIN SPI dapat dilihat pada
gambar 2.25.
LED : 13. Ada built -in LED terhubung ke pin digital 13. Ketika pin dengan nilai TINGGI , LED menyala , ketika pin yang dipakai RENDAH ,
lampu akan mati.
TWI (Two – Ware Inteerface ): Pin 20(SDA) dan pin 21(SCL). Dukungan
adalah bahwa pin ini tidak berada di lokasi yang sama dengan pin
TWI pada Duemilanove atau Diecimila. Letak PIN TWI dapat dilihat
pada gambar 2.25.
Arduino Mega2560 memiliki 16 input analog , yang masing-masing
menyediakan 10 bit resolusi (yaitu 1024 nilai yang berbeda ). Secara default
mereka mengukur dari ground sampai 5 volt , meskipun mungkin untuk
mengubah jangkauan menggunakan pin AREF dan fungsi analogReference ( ).
(Arduino.cc)
Gambar 2.5 Interface Arduino 2650
2.4 Software Arduino IDE
Arduino IDE adalah software yang ditulis menggunakan java dan
berdasarkan pengolahan seperti, avr-gcc, dan perangkat lunak open source lainnya
(Djuandi, 2011). Arduino IDE terdiri dari:
PW M C O M U N IC AT IO N DIGITAL AN AL O G IN AT M EG A2 56 0 16 AU 11 26 TX0 TX3 TX2 TX1 SDA SCL RX0 RX3 RX2 RX1 PD0/SCL/INT0 21 PD1/SDA/INT1 20 PD2/RXD1/INT2 19 PD3/TXD1/INT3 18 PH0/RXD2 17 PH1/TXD2 16 PJ0/RXD3/PCINT9 15 PJ1/TXD3/PCINT10 14 PE0/RXD0/PCINT8 0 PE1/TXD0/PDO 1 PE4/OC3B/INT4 2 PE5/OC3C/INT5 3 PG5/OC0B 4 PE3/OC3A/AIN1 5 PH3/OC4A 6 PH4/OC4B 7 PH5/OC4C 8 PH6/OC2B 9 PB4/OC2A/PCINT4 10 PB5/OC1A/PCINT5 11 PB6/OC1B/PCINT6 12 PB7/OC0A/OC1C/PCINT7 13 AREF PA 0/ AD 0 22 PA 1/ AD 1 23 PA 2/ AD 2 24 PA 3/ AD 3 25 PA 4/ AD 4 26 PA 5/ AD 5 27 PA 6/ AD 6 28 PA 7/ AD 7 29 PC 6/ A1 4 31 PC 5/ A1 3 32 PC 4/ A1 2 33 PC 3/ A1 1 34 PC 2/ A1 0 35 PC 1/ A9 36 PC 0/ A8 37 PD 7/ T0 38 PG 2/ AL E 39 PG 1/ RD 40 PG 0/ W R 41 PL 7 42 PL 6 43 PL 5/ O C5 C 44 PL 4/ O C5 B 45 PL 3/ O C5 A 46 PL 2/ T5 47 PL 1/ IC P5 48 PL 0/ IC P4 49 PB 3/ M IS O /P CI NT 3 50 PB 2/ M O SI /P CI NT 2 51 PB 1/ SC K/ PC IN T1 52 PB 0/ SS /P CI NT 0 53 PK7/ADC15/PCINT23 A15 PK6/ADC14/PCINT22 A14 PK5/ADC13/PCINT21 A13 PK4/ADC12/PCINT20 A12 PK3/ADC11/PCINT19 A11 PK2/ADC10/PCINT18 A10 PK1/ADC9/PCINT17 A9 PK0/ADC8/PCINT16 A8 PF7/ADC7/TDI A7 PF6/ADC6/TDO A6 PF5/ADC5/TMS A5 PF4/ADC4/TCK A4 PF3/ADC3 A3 PF2/ADC2 A2 PF1/ADC1 A1 PF0/ADC0 A0 RESET PC 7/ A1 5 30 ARDUINO
1. Editor program, sebuah window yang memungkinkan pengguna menulis
dan mengedit program dalam bahasa processing.
2. Verify / Compiler, sebuah modul yang mengubah kode program (bahasa
processing) menjadi kode biner. Bagaimanapun sebuah mikrokontroler
tidak akan bisa memahami bahasa processing, yang dipahami oleh
mikrokontroler adalah kode biner.
3. Uploader, sebuah modul yang memuat kode biner dari komputer ke
dalam memori mikrokontroler di dalam papan arduino.
Gambar 2.6 Tampilan Software Arduino IDE
(Arduino, 2011)
Pada Gambar 2.6 terdapat menu bar, kemudian toolbar dibawahnya, dan
sebuah area putih untuk editing sketch, area hitam dapat kita sebut sebagai
2.5 Bahasa Pemograman Arduino
Arduino ini bisa dijalankan di komputer dengan berbagai macam
platform karena didukung atau berbasis Java. Source program yang dibuat untuk
aplikasi mikrokontroler adalah bahasa C/C++ dan dapat digabungkan dengan
assembly. (Arduino.cc)
1. Struktur
Setiap program Arduino (biasa disebut sketch) mempunyai dua buah
fungsi yang harus ada (Arduino.cc). Antara lain:
a) void setup( ) { }
Semua kode didalam kurung kurawal akan dijalankan hanya satu kali
ketika program Arduino dijalankan untuk pertama kalinya.
b) void loop( ) { }
Fungsi ini akan dijalankan setelah setup (fungsi void setup) selesai.
Setelah dijalankan satu kali fungsi ini akan dijalankan lagi, dan lagi
secara terus menerus sampai catu daya (power) dilepaskan.
2. Serial
Serial digunakan untuk komunikasi antara arduino board, komputer
atau perangkat lainnya. Arduino board memiliki minimal satu port serial yang
berkomunikasi melalui pin 0 (RX) dan 1 (TX) serta dengan komputer melalui
USB. Jika menggunakan fungsi – fungsi ini, pin 0 dan 1 tidak dapat digunakan
untuk input digital atau output digital (Arduino.cc). Terdapat beberapa fungsi
a. Syntax
Adalah elemen bahasa C yang dibutuhkan untuk format penulisan.
(Arduino.cc)
b. Variabel
Sebuah program secara garis besar dapat didefinisikan sebagai
instruksi untuk memindahkan angka dengan cara yang cerdas. Variabel inilah
yang digunakan untuk memindahkannya. (Arduino.cc).
2.6 Xbee
Xbeemerupakan perangkat yang menunjang komunikasi data tanpa
kabel (wireless). Terdapat 2 jenis Xbee, yaitu :
a. Xbee 802.15.4 (Xbee Series 1)
Xbeeseri ini hanya dapat digunakan untuk komunikasipoint to pointdan
topologi star dengan jangkauan 30 meter indoordan 100 meteroutdoor.
b. Xbee ZB Series 2
Xbeeseries 2 dapat digunakan untuk komunikasipoint to point, point to
multipoint dan topologi star, dan topologi mesh dengan jangkauan 40
meterindoor dan 100 meteroutdoor.
Xbeeseries 1 maupun series 2 tersedia dalam 2 bentuk berdasarkan
kekuatan transmisinya yaituxbeereguler dan xbee-pro.Xbee-PRO mempunyai
kekuatan transmisi lebih kuat, ukuran perangkatnya lebih besar, dan harganya
outdoor mencapai 1500 meter. Xbee ini dapat digunakan sebagai pengganti serial
/ USB atau dapat memasukkannya ke dalam command mode dan
mengkonfigurasinya untuk berbagai macam jaringan broadcast dan mesh. Shield
membagi setiap pin Xbee. Xbee juga menyediakan header pin female untuk
penggunaan pin digital 2 sampai 7 dan input analog, yang di cover oleh shield
(pin digital 8 sampai 13 tidak tercover oleh shield, sehingga dapat menggunakan
header pada papan itu sendiri. (Arduino, 2011)
Gambar 2.7 Xbee dan Xbee Shield.
(Arduino, 2011)
Berikut parameter untuk mengkonfigurasi modul Xbee S2 dengan mode AT.
Tabel 2.2 Parameter Xbee
Perintah Keterangan Nilai valid Nilai Default
ID Id jaringan modul Xbee 0-0Xffff 3332
CH Saluran dari modul
Xbee. 0x0B-0x1A 0x0C
SH dan SL
Nomor seri modul Xbee(SH memberikan 32bit tinggi, SL32 bit rendah). Read-only.
0-0xFFFFFFFF
berbeda untuk setiap modul
MY Alamat16-bit dari
modul. 0-0xFFFF 0
Dh dan DL
Alamat tujuan untuk komunikasi
nirkabel(DH adalah 32bit tinggi, DL32 low).
0-0xFFFFFFFF 0(untuk kedua
Perintah Keterangan Nilai valid Nilai Default
DH dan DL)
BD
baud rate yang digunakan untuk komunikasi serial dengan papan Arduino atau komputer.
0 (1200 bps)
3 (9600 baud) 1 (2400 bps)
2 (4800 bps) 3 (9600 bps) 4 (19200 bps) 5 (38400 bps) 6 (57600 bps) 7 (115200 bps)
Catatan : meskipun nilai-nilai yang valid dan standar dalam Tabel di atas
ditulis dengan awalan "0x" (untuk menunjukkan bahwa mereka adalah
nomor heksadesimal), modul tidak akan mencakup "0x" ketika
melaporkan nilai parameter, dan anda harus menghilangkan ketika
menetapkan nilai-nilai (Arduino, 2011).
2.7 Xbee Usb Adapter dan Software X-CTU
Xbee USB adapter (Gambar 2.8) merupakan alat untuk menghubungkan
modul Xbee ke komputer dengan kabel mini USB dan selanjutnya dapat
dikonfigurasi menggunakan software X-CTU (Gambar 2.9). Software X-CTU
merupakan software yang digunakan untuk mengkonfigurasi Xbee agar dapat
berkomunikasi dengan Xbee lainya. Parameter yang harus diatur adalah PAN ID
(Personal Area Network) ID yaitu parameter yang mengatur radio mana saja yang
dapat berkomunikasi, agar dapat berkomunikasi PAN ID dalam satu jaringan
harus sama. Xbee dapat berkomunikasi point to point dan point to multipoint
Gambar 2.8 Xbee Usb Adapter dan Kabel Mini Usb
(Arduino, 2011)
Gambar 2.9 Tampilan Software X-CTU
(Arduino, 2011)
2.8 Visual Basic
Visual Basic adalah salah suatu development tools untuk membangun
menggunakan pendekatan Visual untuk merancang user interface dalam bentuk
form. Tampilan Visual Basic terdapat pada Integrated Development Environment
(IDE) seperti pada Gambar 2.10.
Gambar 2.10 Tampilan Utama Visual Basic 6.0
Sumber : (Octovhiana, 2003)
Adapun pejelasan jendela-jendela adalah sebagai berikut :
a) Menu Bar, digunakan untuk memilih tugas-tugas tertentu seperti
menyimpan project, membuka project, dll
b) Main Toolbar, digunakan untuk melakukan tugas-tugas tertentu
dengan cepat.
c) Jendela Project, jendela berisi gambaran dari semua modul yang
d) Jendela Form Designer, jendela merupakan tempat anda untuk
merancang user interface dari aplikasi.
e) Jendela Toolbox, jendela berisi komponen-komponen yang dapat anda
gunakan untuk mengembangkan user interface.
f) Jendela Code, merupakan tempat bagi anda untuk menulis koding.
Anda dapat menampilkan jendela dengan menggunakan kombinasi
Shift-F7.
g) Jendela Properties, merupakan daftar properti-properti object yang
sedang terpilih. Sebagai contohnya anda dapat mengubah warna
tulisan (foreground) dan warna latar belakang (background). Anda
dapat menggunakan F4 untuk menampilkan jendela properti.
h) Jendela Color Palette, adalah fasilitas cepat untuk mengubah warna
suatu object.
i) Jendela Form Layout, akan menunjukan bagaimana form
bersangkutan ditampilkan ketika runtime. (Octovhiana, 2003)
2.9 Parameter QoS (Quality of Service)
Performansi mengacu ke tingkat kecepatan dan keandalan penyampaian
berbagai jenis beban data di dalam suatu komunikasi. Performansi merupakan
kumpulan dari beberapa parameter besaran teknis, yaitu :
Throughput, yaitu kecepatan (rate) transfer data efektif, yang diukur
dalam bps. Troughput merupakan jumlah total kedatangan paket yang
sukses yang diamati pada destination selama interval waktu tertentu
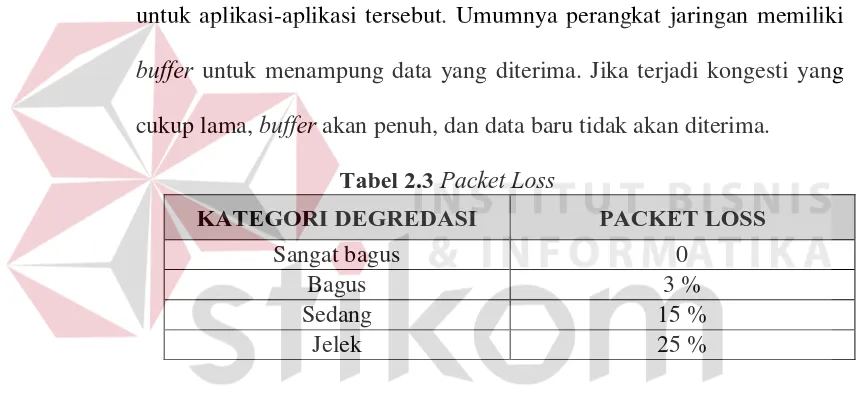
Packet Loss, merupakan suatu parameter yang menggambarkan suatu
kondisi yang menunjukkan jumlah total paket yang hilang, dapat terjadi
karena collision dan congestion pada jaringan dan hal ini berpengaruh
pada semua aplikasi karena retransmisi akan mengurangi efisiensi
jaringan secara keseluruhan meskipun jumlah bandwidth cukup tersedia
untuk aplikasi-aplikasi tersebut. Umumnya perangkat jaringan memiliki
buffer untuk menampung data yang diterima. Jika terjadi kongesti yang
[image:30.595.88.516.306.509.2]cukup lama, buffer akan penuh, dan data baru tidak akan diterima.
Tabel 2.3Packet Loss
KATEGORI DEGREDASI PACKET LOSS
Sangat bagus 0
Bagus 3 %
Sedang 15 %
Jelek 25 %
Delay (latency), adalah waktu yang dibutuhkan data untuk menempuh
jarak dari asal ke tujuan. Delay dapat dipengaruhi oleh jarak, media fisik,
kongesti atau juga waktu proses yang lama.(Nurhayati, 2012)
Compression and Algoritmic delay Packetization Delay Serialisation Delay Decompression Delay De Jitter Buffer
[image:31.595.93.501.286.689.2]Network Delay
Gambar 2.11 Network Delay
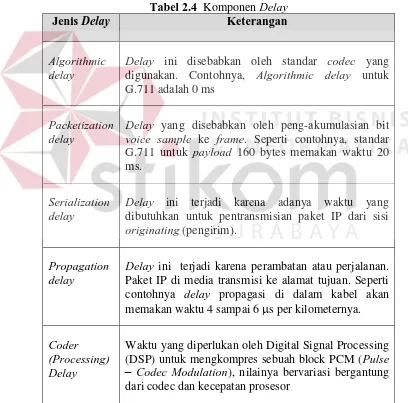
Tabel 2.4 Komponen Delay
Jenis Delay Keterangan
Algorithmic delay
Delay ini disebabkan oleh standar codec yang
digunakan. Contohnya, Algorithmic delay untuk
G.711 adalah 0 ms
Packetization delay
Delay yang disebabkan oleh peng-akumulasian bit
voice sample ke frame. Seperti contohnya, standar G.711 untuk payload 160 bytes memakan waktu 20 ms.
Serialization delay
Delay ini terjadi karena adanya waktu yang dibutuhkan untuk pentransmisian paket IP dari sisi
originating (pengirim).
Propagation delay
Delay ini terjadi karena perambatan atau perjalanan. Paket IP di media transmisi ke alamat tujuan. Seperti
contohnya delay propagasi di dalam kabel akan
memakan waktu 4 sampai 6 s per kilometernya.
Coder (Processing) Delay
Waktu yang diperlukan oleh Digital Signal Processing
(DSP) untuk mengkompres sebuah block PCM (Pulse
26 3.1 Metode Penelitian
Metode penelitian yang digunakan pada perancangan ini adalah
komunikasi data multipoint wireless sensor network. Perancangan terdiri dari 2
buah node dengan 1 base station yang dikomuikasikan secara bersamaan dengan
kecepatan data 115200bps. Dalam berkomunikasi, 2 node yang terdiri dari Xbee
mengirim ke satu base station sehingga alamat destination pada masing - masing
node nilainya sama dengan nomor seri Xbee bagian base station.
Untuk melakukan komunkasi multipoint, 2 buah node diset menjadi
router (router 1 dan router 2) sementara pada base station diset sebagai
coordinator, alamat destination node (DH (Destinqtion High) dan DL
(Destination Low)) adalah alamat source coordinator (SH (Source High) dan SL
(Source Low)). Data yang diterima oleh coordiator selanjutnya dipilah untuk
mengetahui arah data dari node pengirim, dalam hal ini masing - masing node
mengirimkan data dengan protokol data yang terdiri dari ID node, dan data yang
dibawa sehingga pemilahan data dapat diketahui dengan memeriksa ID yang
masuk pada deretan protokol pengirim (node). Adapun data yag dikirim berupa
nilai tegangan dari sensor heartbeat (jantung) yang dipresentasikan dalam bentuk
ASCII yang selanjutnya ditampilkan dalam bentuk grafik pada form perangkat
lunak VB (Visual Basic). Data tersebut selanjutnya disimpan dalam file txt
3.2 Model Perancangan
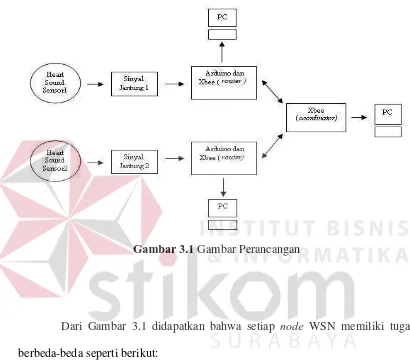
Pada perancangan ini penulis menggambarkan perancangan sistemnya
[image:33.595.95.505.177.537.2]seperti pada gambar 3.1 berikut.
Gambar 3.1 Gambar Perancangan
Dari Gambar 3.1 didapatkan bahwa setiap node WSN memiliki tugas
berbeda-beda seperti berikut:
a) Node Router 1
Pada node ini, node bertanggung jawab sebagai pencatat hasil
auskultasi sinyal jantung pada pasien pertama, dan mengirimkan data
pada node coordinator sesuai dengan protokol yang telah dibuat melalui
b) Node Router 2
Pada node ini, node bertanggung jawab sebagai pencatat hasil
auskultasi sinyal jantung pada pasien kedua, dan mengirimkan data pada
node coordinator sesuai dengan protokol yang telah dibuat melalui
modul Arduino.
c) Nodecoordinator
Pada node ini, node bertanggung jawab atas penerima data yang
telah dikirimkan oleh kedua node sensor (router). Data yang diterima
oleh node ini masih belum diolah, tapi data yang diterima sesuai dengan
protokol pengiriman data. Pada node coordinator data langsung
dikirimkan ke end device / PC tanpa pengolahan melalui modul arduino,
hal ini dikarenakan proses pengolahan data dilakukan pada end device.
d) End device / PC (Personal Computer)
Terdapat 3 end device yang masing – masing berkomunikasi
secara unicast (point to point) dengan node coordinator, dan dengan
router. Pada end device yang tersambung dengan node coordinator
digunakan oleh user untuk melihat hasil auskultasi dari node sensor 1 dan
node sensor 2, dan data yang diperoleh falid (tidak tertukar). Dan
dilakukannya pemisahan data dan pengelompokan data sinyal asukultasi
berdasarkan asal data. Hal ini dapat dilakukan dengan melihat ID yang
sudah diberikan pada saat pengiriman data. Sedangkan penyimpanan data
pada masing – masing end device yang terhubung dengan router
yang diterima oleh node coordinator. Agar dapat diketahui berapa besar
througput, berapa data yang loss, dan delay ketika sistem ini dijalankan.
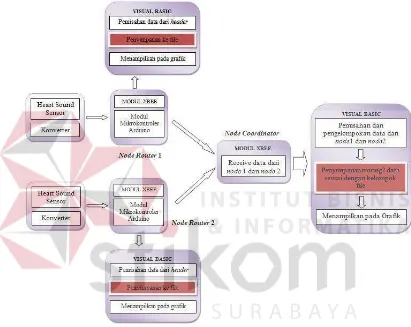
3.3 Perancangan Sistem
[image:35.595.94.505.206.533.2]Adapun perancangan blok diagram ditunjukkan sebagaimana gambar 3.2:
Gambar 3.2 Blok Diagram Sistem
Dalam tugas akhir ini, penulis hanya akan memfokuskan penjelasan data
jaringan pada transmisi sinyal auskultasi jantung dari dua node ke satu node
coordinator.
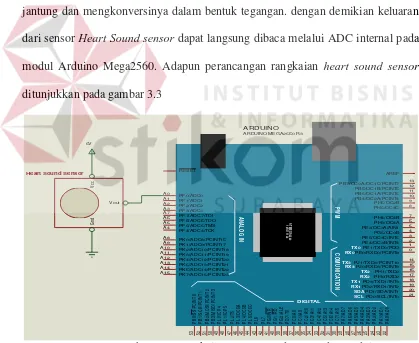
3.4 Peracangan perangkat keras 3.4.1 Perancangan sensor jantung
Untuk dapat mendeteksi adanya detak jantung pasien secara elektronik,
maka dibutuhkan sensor. Sensor yang digunakan pada penelitan transimsi sinyal
auskultasi jantung ini adalah Heart Sound Sensor. Sensor ini telah dilengkapi
degan pengkondisi sinyal dan fiter yang bertugas meredam dan mengolah sinyal
jantung dan mengkonversinya dalam bentuk tegangan. dengan demikian keluaran
dari sensor Heart Sound sensor dapat langsung dibaca melalui ADC internal pada
modul Arduino Mega2560. Adapun perancangan rangkaian heart sound sensor
ditunjukkan pada gambar 3.3
P W M C O M U N IC A T IO N DIGITAL A N A L O G IN A T M E G A 25 60 16 A U 1 12 6 TX0 TX3 TX2 TX1 SDA SCL RX0 RX3 RX2 RX1 PD0/SCL/INT0 21 PD1/SDA/INT1 20 PD2/RXD1/INT2 19 PD3/TXD1/INT3 18 PH0/RXD2 17 PH1/TXD2 16 PJ0/RXD3/PCINT9 15 PJ1/TXD3/PCINT10 14 PE0/RXD0/PCINT8 0 PE1/TXD0/PDO 1 PE4/OC3B/INT4 2 PE5/OC3C/INT5 3 PG5/OC0B 4 PE3/OC3A/AIN1 5 PH3/OC4A 6 PH4/OC4B 7 PH5/OC4C 8 PH6/OC2B 9 PB4/OC2A/PCINT4 10 PB5/OC1A/PCINT5 11 PB6/OC1B/PCINT6 12 PB7/OC0A/OC1C/PCINT7 13 AREF P A 0/ A D 0 22 P A 1/ A D 1 23 P A 2/ A D 2 24 P A 3/ A D 3 25 P A 4/ A D 4 26 P A 5/ A D 5 27 P A 6/ A D 6 28 P A 7/ A D 7 29 P C 6/ A 14 31 P C 5/ A 13 32 P C 4/ A 12 33 P C 3/ A 11 34 P C 2/ A 10 35 P C 1/ A 9 36 P C 0/ A 8 37 P D 7/ T0 38 P G 2/ A LE 39 P G 1/ R D 40 P G 0/ W R 41 P L7 42 P L6 43 P L5 /O C 5C 44 P L4 /O C 5B 45 P L3 /O C 5A 46 P L2 /T 5 47 P L1 /IC P 5 48 P L0 /IC P 4 49 P B 3/ M IS O /P C IN T3 50 P B 2/ M O S I/P C IN T2 51 P B 1/ S C K /P C IN T1 52 P B 0/ S S /P C IN T0 53 PK7/ADC15/PCINT23 A15 PK6/ADC14/PCINT22 A14 PK5/ADC13/PCINT21 A13 PK4/ADC12/PCINT20 A12 PK3/ADC11/PCINT19 A11 PK2/ADC10/PCINT18 A10 PK1/ADC9/PCINT17 A9 PK0/ADC8/PCINT16 A8 PF7/ADC7/TDI A7 PF6/ADC6/TDO A6 PF5/ADC5/TMS A5 PF4/ADC4/TCK A4 PF3/ADC3 A3 PF2/ADC2 A2 PF1/ADC1 A1 PF0/ADC0 A0 RESET P C 7/ A 15 30 ARDUINO
ARDUINO MEGA2560 R3
5V V cc G nd Vout
[image:36.595.91.510.312.655.2]Heart Sound Sensor
3.4.2 Perancangan rangkaian Xbee Zigbee S2B
Agar modul arduino dapat berkomunikasi secara serial wireless dengan
perangkat lain, maka dibutuhkan rangkaian wireless yang dalam perancangan ini
menggunakan modul Zigbee S2B. modul zigbee dapat berkomunikasi wireless
dan diakses menggunakan komunikasi serial TTL (Time to Live). Adapun port
serial yang digunakan untuk pengendalian dan pembacaan modul Xbee adalah
TX0 dan RX0 pada modul arduino sebagaimana ditunjukkan pada gambar 3.4:
P W M C O M U N IC A T IO N DIGITAL A N A L O G IN A T M E G A 2 5 6 0 1 6 A U 1 1 2 6 TX0 TX3 TX2 TX1 SDA SCL RX0 RX3 RX2 RX1 PD0/SCL/INT0 21 PD1/SDA/INT1 20 PD2/RXD1/INT2 19 PD3/TXD1/INT3 18 PH0/RXD2 17 PH1/TXD2 16 PJ0/RXD3/PCINT9 15 PJ1/TXD3/PCINT10 14 PE0/RXD0/PCINT8 0 PE1/TXD0/PDO 1 PE4/OC3B/INT4 2 PE5/OC3C/INT5 3 PG5/OC0B 4 PE3/OC3A/AIN1 5 PH3/OC4A 6 PH4/OC4B 7 PH5/OC4C 8 PH6/OC2B 9 PB4/OC2A/PCINT4 10 PB5/OC1A/PCINT5 11 PB6/OC1B/PCINT6 12 PB7/OC0A/OC1C/PCINT7 13 AREF P A 0 /A D 0 2 2 P A 1 /A D 1 2 3 P A 2 /A D 2 2 4 P A 3 /A D 3 2 5 P A 4 /A D 4 2 6 P A 5 /A D 5 2 7 P A 6 /A D 6 2 8 P A 7 /A D 7 2 9 P C 6 /A 1 4 3 1 P C 5 /A 1 3 3 2 P C 4 /A 1 2 3 3 P C 3 /A 1 1 3 4 P C 2 /A 1 0 3 5 P C 1 /A 9 3 6 P C 0 /A 8 3 7 P D 7 /T 0 3 8 P G 2 /A L E 3 9 P G 1 /R D 4 0 P G 0 /W R 4 1 P L 7 4 2 P L 6 4 3 P L 5 /O C 5 C 4 4 P L 4 /O C 5 B 4 5 P L 3 /O C 5 A 4 6 P L 2 /T 5 4 7 P L 1 /I C P 5 4 8 P L 0 /I C P 4 4 9 P B 3 /M IS O /P C IN T 3 5 0 P B 2 /M O S I/ P C IN T 2 5 1 P B 1 /S C K /P C IN T 1 5 2 P B 0 /S S /P C IN T 0 5 3 PK7/ADC15/PCINT23 A15 PK6/ADC14/PCINT22 A14 PK5/ADC13/PCINT21 A13 PK4/ADC12/PCINT20 A12 PK3/ADC11/PCINT19 A11 PK2/ADC10/PCINT18 A10 PK1/ADC9/PCINT17 A9 PK0/ADC8/PCINT16 A8 PF7/ADC7/TDI A7 PF6/ADC6/TDO A6 PF5/ADC5/TMS A5 PF4/ADC4/TCK A4 PF3/ADC3 A3 PF2/ADC2 A2 PF1/ADC1 A1 PF0/ADC0 A0 RESET P C 7 /A 1 5 3 0 ARDUINO
ARDUINO MEGA2560 R3
RXD
TXD
wire antenna
Modul Xbee 2,4Ghz
GND Vcc
S2B
[image:37.595.91.504.289.551.2]5V
Gambar 3.4 Hubungan Rangkaian Xbee dan arduino
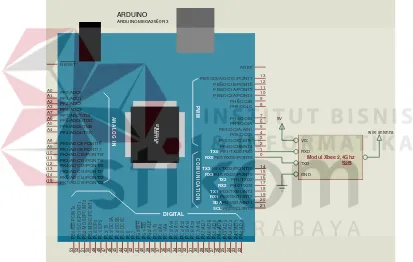
3.4.3 Perancangan rangkaian USB to serial Xbee
Untuk dapat menerima data serial hasil pengiriman dari node 1 dan node 2
dibutuhkan Xbee. Sementara itu agar hasil pembacaan dan pengiriman data pada
Xbee dapat diproses menggunakan laptop atau PC, maka dibutuhkan konverter
USB to serial. Untuk itu pada perancangan ini digunakan modul USB to serial
Xbee yang difungsikan khusus untuk menjembatani antarmuka UART antara
komputer dengan Xbee. Adapun rangkaian modul USB to serial Xbee ditunjukkan
pada gambar 3.4:
VCC 1 D+ 3 D- 2 GND 4 J1 USBCONN vcc D+ D-Gnd
USB to TTL
RXD TXD
Gnd
ke USB PC/LAPTOP
DTR CTS
RXD
TXD
wire antenna
Modul Xbee 2,4Ghz
GND Vcc
S2B
5V
Gambar 3.5 Rangkaian modul USB to Serial Xbee pada base station
Sementara itu bentuk fisik dari modul USB to serial Xbee ditunjukkan
pada gambar 3.6
3.4.4 Arduino 2560
Pada gambar 3.2 terdapat 2 arduino 2560 yang memiliki fungsi yang
sama yaitu membaca sensor yang memiliki nilai analog, pembacaan data
dilakukan dengan cara inputan yang berasal dari sensor diletakkan pada PORT
A0, untuk membaca nilai dari sinyal analog tersebut digunakan fungsi
ReadAnalog didalam modul arduino.
Pada modul arduino juga dilakukan pemberian identitas pada data yang
akan ditransmisikan. Yang artinya data yang dikirim mendapatkan tambahan
identitas node. Dari tambahan itu yang akan membuat node dapat mengenali asal
data tersebut. Contoh pemberian identitas yaitu diberi identitas N1 untuk node
router 1, dan N2 untuk node router 2. Identitas ini akan dikirimkan bersama
dengan inti data yang node router kirimkan kepada node coordinator. Pada isi
data yang diterima router coordinator nantinya terdapat simbol N1 (untuk data
dari node router 1) atau N2 (untuk data dari node router 2) selanjutnya diikuti
inti pesan yang dikirim masing – masing node router.
Gambar 3.7 Format Pengiriman Data
Berikut penjelasan dari gambar 3.7 :
1. $ : penanda awal pengiriman data
3. DATA : data sinyal auskultasi jantung yang dikirimkan
4. # : penanda akhir pengiriman data
5. % : digunakan sebagai pemisah data dengan header
Hal tersebut dibuat untuk memudahkan dalam pemisahan data pada saat
penerimaan data pada coordinator. Selanjutnya arduino mengirimkan informasi
yang dipancar melalui pemancar data zigbee.
3.4.5 Xbee
Untuk mengirimkan data dari masing – masing node ke coordinator
diperlukan sebuah pemancar data. dalam penelitian ini penulis menggunakan
Xbee Series 2 untuk pemancar data. Konfigurasi yang dilakukan pada Xbee
sangat penting, agar data dapat dikirimkan ke alamat yang sesuai.
Untuk mengkonfigurasi Xbee tersebut dibutuhkan sebuah software.
Software yang biasa digunakan untuk mengkonfigurasi Xbee salah satunya ialah
X-CTU.
Xbee dikonfigurasi untuk menjadi end device dalam mode AT untuk
Xbee yang terdapat pada node router dan coordinator dalam mode AT. Dalam
mengkonfigurasi Xbee series 2 hal yang terpenting ialah mengisi nilai PAN ID,
DH dan DL.
Langkah pertama untuk dapat berkomunikasi dalam satu jaringan, maka
PAN ID antar Xbee harus diisi dengan nilai yang sama. Langkah kedua yaitu
mengisi DH dengan ID yang terdapat pada Xbee dan DL dengan nilai yang sesuai
dilakukan agar Xbee yang digunakan pada node router hanya berkomunikasi
dengan Xbee coordinator.
3.4.6 Visual Basic
Visual basic pada komputer atau end device berfungsi untuk mengolah
data yang dikirimkan oleh node coordinator. Data yang diterima tersebut masih
berupa sekumpulan informasi dan kode yang masih lengkap yang berup header
dan data (sesuai dengan protokol), sehingga diperlukan pemisahan data serta
pengelompakan pada data tersebut agar didapatkan sebuah data beserta informasi
yang diinginkan dari data tersebut. Seperti yang dijelaskan pada gambar 3.3
pengelompokan data sesuai dengan kode yang terdapat pada satu paket data (N1
atau N2), selanjutnya data yang sudah dipisah di simpan sesuai dengan
pengelompokan data. Hal ini dilakukan agar data yang diperoleh nantinya dapat
dianalisa, sehingga dapat diketahui kemapuan algoritma dari sistem transmisi
auskultasi ini. Selanjutnya dari data yang telah dikelompokkan dan dipisah
ditampilkan pada sebuah grafik agar dapat dilihat oleh user. Pada node
coordinator terdapat 2 penelitian yang akan dilakukan, yaitu penelitian untuk
penerimaan data secara real time dan tidak real time, agar dapat dibandingkan
keakuratan data saat diterima secara real time dan tidak real time dan nantinya
dapat dijadikan acuan saat dibangun sebuah aplikasi pengiriman data auskultasi
jantung. Maka dibuatlah sebuah desain dari Visual Basic.
Terdapat 3 desain yang harus dibuat, yaitu desain untuk penyimpanan
data pada end device router dan desain pada end device coordinator (real time dan
Karena nantinya akan dibandingkan antara data pada router dan coordinator,
apakah data yang dikirimkan node router sesuai dengan data yang diterima node
coordinator dan baik mana data yang diterima secara real time dan tidak real
time.
Gambar 3.8 Desain pada end device router
Dari desain diatas user dapat melihat secara langsung hasil sinyal
jantung, sehingga dapat mengetahui benar tidaknya posisi heart sound sensor
pada jantung. Hal ini dikarenakan penempatan posisi sensor sangat berpengaruh
terhadap hasil yang didapat, dimana jika posisi sensor tidak valid, maka akan
menyebabkan hasil pembacaan tidak akurat. Dan dapat dilihat langsung nilai dari
sensor.
Dari gambar 3.8 terdapat pemilihan PORT, hal ini digunakan untuk
mikrokontroler mengirimkan data pada pemancar, maka secara otomatis data juga
akan terkirim secara serial ke komputer. Terdapat kolom data yang diterima dan
data yang telah dipisah agar dapat terlihat bahwa data dari masing – masing router
tidak tertukar pada saat proses pemisahan data. Grafik digunakan untuk dapat
melihat apakah data yang diterima adalah data yang bersal dari sinyal jantung,
karena sifat dari sensor jantung yang digunakan adalah menangkap suara.
Gambar 3.9 Desain pada end device coordinator (Real Time)
Gambar 3.11 Desain pada end device coordinator untuk melihat grafik(tidak
real time)
Sama halnya dengan desain pada end device router yang mengharuskan
user memilih PORT yang telah tersambung dengan komputer, pada end device
coordinator juga mengharuskan user melakukan hal yang sama. Hanya saja
berbeda dengan desain pada end device router desain end device coordinator
terdapat dua grafik karena pada end device coordinator digunakan untuk melihat
data auskultasi dari dua jantung.
Terdapat perbedaan desain antara node coordinator real time dengan
coordinator tidak real time, karena pada coordinator tidak real time
membutuhkan perintah untuk mengambil data dari router yang telah disimpan
pada drive sedangkan pada coordinator real time tidak dibutuhkan perintah
Pada gambar 3.9 terdapat dua kolom data yang diterima dan data yang
telah dipisah agar dapat terlihat bahwa data dari masing – masing router tidak
tertukar pada saat proses pemisahan data. Selain itu juga terdapat dua grafik yang
menampilkan sinyal jantung dari masing – masing node. Dan nantinya juga akan
terdapat dua file penyimpanan yang menyimpan data dari masing – masing node.
Pada gambar 3.10 hanya terdapat perintah untuk koneksi dengan serial
dan perintah mengambil data, karena grafik tidak langsung ditampilkan, melaikna
disimpan terlebih dulu kedalam suatu file yang nantinya akan di baca setelah data
selesai terkirim. Pemisahan grafik dengan tampilan utama dimaksudkan agar
program dapat menampilkan lebih dari 2 data pada grafik. Sehingga analisa dapat
lebih fokus pada setiap node karena grafik setiap node ditampilkan dalan sebuah
form.
3.5 Perancangan Perangkat Lunak
Dari perancangan sistem diatas, selain perancangan hardware, juga
dibutuhkan perancangan perangkat lunak untuk menjalankan perancangan
hardware yang telah dibuat.
Perangkat lunak terdiri dari beberapa algoritma perancangan dari sistem
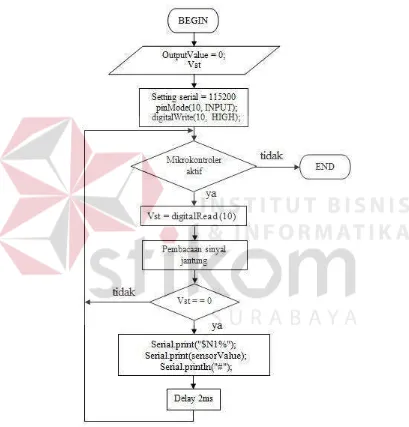
3.5.1 Algoritma Pembacaan Sinyal Jantung
Gambar 3.12 Flowchart pembacaan Heart Sound Sensor
Seperti yang sudah dijelaskan diatas, hasil keluaran dari sensor jantung
adalah berupa sinyal analog. Maka pada modul arduino dilakukan pembacaan
melalui salah satu fungsi yang dimiliki oleh Arduino Mega2560, fungsi tersebut
adalah readAnalog. Pada pemrograman modul Arduino Mega2560, user
dimudahkan dengan beberapa fungsi yang sudah dimilikinya. Sinyal analog pada
sensor diubah menjadi data ADC dengan resolusi10 bit. Hal ini ditujukan agar
sinyal analog yang dibaca lebih presisi saat dikonversi ADC. Fungsi yang terdapat
pada Arduino untuk mengubah data analog menjadi data desimal dengan ukuran
10 bit adalah :
Selanjutnya data yang diperoleh akan ditransmisikan oleh pemancar sesuai dengan data yang telah diolah. Proses pengiriman data tidak langsung dikirim, karena data yang ada akan diberi ID untuk pengidentifikasian asal data sesuai dengan asal router.
[image:47.595.94.503.200.627.2]3.5.2 Algoritma Pengiriman Sinyal Jantung
Pada dasarnya konsep dari sensor jantung adalah menerima setiap suara,
maka apabila ketika sensor jantung mendapatakan tegangan, secara langsung data
apapun akan ditransmisikan ke node coordinator, sehingga mengakibatkan
banyaknya noise yang diterima oleh node coordinator diawal penerimaan data.
Selain itu, karena pada transmisi sinyal jantung ini data yang didapat dari dua
node, maka untuk mempermudah dalam pengolahan data, maka dibuatlah
algoritma seperti gambar 3.14.
Pemrograman Ardunino Mega 2560 merupakan sebuah pemrograman
modul, maka pemrograman langsung dilakukan pada setiap pin. Pin 10 digunakan
sebagai saklar. PIN 10 digunakan untuk memulai pengiriman data, dimana data
dikirim ketika PIN 10 berlogika LOW. Pengiriman dianggap selesai ketika user
menonaktifkan PIN 10.
Pengiriman data dilakukan sesuai dengan protokol yang sudah ditetapkan
pada gambar 3.7, sehingga dapat disimpulkan bahwa pengiriman data berupa
string atau caracter. Pengiriman data akan dipancarkan oleh modul pemancar
yang sudah disediakan.
Pengiriman dilakukan dengan delay 2ms sesuai dengan ketetapan yang
ada, yaitu pengiriman dilakukan minimal dengan 2 kali frekuensi sampling
Pada tugas akhir ini, penulis menggunakan Arduino Mega2560 sebagai
mikrokontrolernya. Software yang digunakan untuk memprogam arduino tersebut
ialah software Arduino IDE. Dan dari algoritma yang dibuat diatas maka
dibuatlah program seperti gambar 3.15
Gambar 3.15 Tampilan program arduino pada software Arduino IDE
Berikut contoh pemrogaman modul arduino Mega 2560 pada node
a. Pembuatan variabel
Dalam pembuatan variabel, terdapat beberapa variabel yang digunakan
oleh penulis seperti pada algoritma diatas. ini penulis menggunakan variabel tipe
string yang bernama “sensorValue” untuk menampung data dari sensor,
“outputValue” untuk penampung data setelah dijadikan 10 bit. Pembuatan
variabel ini diletakkan diluar fungsi void agar variabel ini dapat digunakan secara
global. Berikut sebagai contoh :
int Vst;
int sensorValue = 0; int outputValue = 0;
b. fungsi void setup
Dalam fungsi void setup perintah akan dibaca 1 kali setelah progam
berjalan. Dalam tugas akhir ini penulis mengisikan baudrate dan variabel -
variabel dalam kondisi kosong, begitu juga pemberian nilai awal pada PIN – PIN
yang digunakan. Berikut sebagai contoh :
void setup() {
Serial.begin(115200); pinMode(10, INPUT); digitalWrite(10, HIGH); }
c. fungsi void loop
Dalam void loop perintah akan dibaca berulang kali selama mikrokontroler
teersambung dengan tegangan. Dalam tugas akhir ini penulis mengisi perintah
bagaimana data diolah dan akhirnya dikirimkan,semua perintah ditulis pada void
loop ini. Dan progam ditulis sesuai dengan algoritma yang telah dibuat seperti
void loop() {
Vst = digitalRead(10);
sensorValue = analogRead(A0);
outputValue = map(sensorValue, 0, 1023, 0, 255); analogWrite(9, outputValue);
if (Vst == 0) {
Serial.print("$N1%"); Serial.print(sensorValue); Serial.println("#");
}
delay(2); }
3.5.3 Algoritma Penerimaan dan Pemisahan Data pada Router
Gambar 3.16 Flowchart Pemisahan dan penyimpanan data pada end device router
Pada transmisi sinyal jantung auskultasi juga diperlukan pemisahan data
sedangkan yang akan di analisa adalah data sinyal, maka pada router juga
dilakukan pemisahan data, sehingga mempermudah penulis nantinya dalam
menganalisa data.
Data yang dikirimkan pada end device secara serial, dalam pemisahan
dan penyimpanan data dilakukan pada saat data yang terambil sesuai dengan
format yang telah ditentukan, maka data akan diambil dengan baik. Apbila data
yang diterima tidak lengkap maka pemisahan data tidak dapat dilakukan. Hal ini
dikarenakan pemisahan data disesuaikan dengan format yang sudah ditentukan
pada saat data dikirim. Data – data yang tidak diperlukan akan diabaikan, dengan
mengosongkan variable yang digunakan untuk menyimpan data.
3.5.4 Algoritma Penerimaan Data pada End Device (Real Time)
Berbeda dengan algoritma penerimaan data pada end device router,
penerimaan data pada end device coordinator terdapat dua data yang diterima
yaitu data dari node 1 dan node 2. Maka selain pemisahan data juga dilakukan
pengelompokan data. Proses pemisahan data dilakukan sama dengan pemisahan
data yang dilakukan pada end device router, hanya saja sebelum dilakukan
pemisahan data dilakukan dulu pengelompokan data sesuai asal data.
Pengelompokan data dapat dilihat dari ID node yang dikirimkan
bersamaan dengan data yang dikirim. Ketika data sudah dikelompokkan,
selanjutnya data baru dipisah. Hal ini akan memudahkan penulis dalam
menganalisa data yang telah terkumpul. Karena data sudah otomatis dalam satu
penulis tidak perlu memisah data secara manual. Flowcart pemisahan dan
penyimpanan data dapat dilihat pada gambar 3.17.
3.5.5 Algoritma Penerimaan Data pada End Device (tidak Real Time)
Gambar 3.18 Flowchart penyimpanan data pada end device coordinator (tidak
Real Time)
Pemisahan data pada coordinator real time dengan coordinator tidak real
time pada dasarnya sama, hanya sajaberbeda dengan algoritma pada coordinator
real time karena data terlebih dahulu disimpan kedalam sebuah file, selanjutnya
data akan ditampilkan ketika user ingin mengambil data dari file. Dan grafik akan
muncul sesuai dengan penerimaan data. Misalnya saja pada file tersebut terdapat
data yang mengindikasikan berasal dari 2 node, tetapi apabila pada file tersebut
hanya mengindikasikan bersal dari node maka hanya akan ada 1 form grafik yang
terbuka. Flowcart pemisahan dan penyimpanan data pada aplikasi offline dapat
3.6 Metode Analisa
Pada transmisi sinyal auskultasi ini, selain pembuatan algoritma
pengiriman data, hal terpenting lainnya adalah analisa dari hasil pengiriman itu
sendiri agar dapat diketahui seberapa baik sistem yang telah dibangun.
3.6.1 Peletakan Sensor pada Jantung
Dalam transmisi sinyal auskultasi, komponen terpenting adalah data yang
diambil dari auskultasi jantung. Maka tahapan yang pertama dilakukan adalah
mengambil data auskultasi dengan meletakkan sensor pada posisi jantung user
dengan tepat.
Posisi jantung manusia adalah pada tulang iga manusia ke 6 di sebelah
kiri dada manusia, atau 5 cm diatas ulu hati di sebelah kiri. Peletakan sensor
sangat berpengaruh, karena apabila sensor tidak diletakkan pada bagian jantung
yang tepat maka data yang akan diterima berupa data noise. Posisi Mitral area
dapat dilihat pada gambar 3.20.
Mitral Area
Gambar 3.20 Letak posisi penempatan sensor pada jantung ( Mitral Area / Left Verticularr Area)
3.6.2 Pengambilan Sinyal Auskultasi Jantung
Proses pengambilan data dilakukan saat semua alat terpasang, dan proses
pengiriman data berlangsung. Seperti yang dijelaskan di atas, melalui grafik kita
dapat melihat apakah sensor sudah berada pada posisi yang tepat.
Data pada masing – masing router dan coordinator akan tersimpan pada
sebuah file. File inilah yang nantinya digunakan untuk menganalisa seberapa baik
sistem dapat mentransmisikan sinyal auskultasi jantung dari 2 node ke 1 titik
coordinator secara bersamaan dan streaming.
Pengambilan sinyal jantung dilakukan selama 30 detik untuk
mendapatkan hasil transmisi sinyal jantung. Hal ini dikarenakan penerimaan data
pada titik coordinator lebih lama karena adanya proses pemisahan data yang
terjadi pada titik coordinator. Contoh sinyal jantung hasil auskultasi terlihat
dalam gambar 3.21.
3.6.3 Analisa Transmisi Sinyal Auskultasi Jantung
Cara menganalisa hasil transmisi jantung adalah dengan memindah data
dari file penyimpanan ke file excel. Lalu data dibandingkan antara data inputan
dengan data yang berasal dari receiver. Posisi data pertama yang sesuai dengan
data yang ada pada transmiter adalah data yang berhasil dikirim dan diterima.
Sehingga dapat diketahui delay penerimaan data dari data yang telah dikirim.
Dari semua data yang dikirim terdapat loss data, loss data dapat diketahui
dari data yang tidak sesuai dengan data yang terdapat pada pengiriman, dan
dengan mengurangkan jumlah data yang terkirim dengan jumlah data yang telah
diterima. Maka data yang loss akan dapat diketahui.
Gambar 3.23 Data yang loss
Dari pencarian delai dan data loss seperti pada gambar 3.21 dan gambar
3.22 maka dapa dilakukan perhitungan untuk mengetahui berapa packet loss yang
diterima, berapa lama pengiriman data serta berapa besar througput rata – rata
setiap pengiriman data.
a. Delay
Setelah menyamakan data antara transmitter dan receiver maka
terdapat selisih urutan antara kedua data tersebut, selisih urutan
tersebutlah yang disebut delay dalam pentransmisian sinyal auskultasi
jantung.
Karena data dikirim setiap 2ms maka jarak antara data tersebut
dikalikan dengan waktu pengiriman data, dan akan ditemukan berapa
b. Packet Loss
Pada pencarian packet loss seperti pada gambar 3.21 maka akan
ditemukan banyak data yang tidak dapat diterima dengan baik oleh
receiver, jumlah paket yang tidak diterima dengan sempurna tersebut
adalah packet loss yang digunakan untun mecari berapa besar persentase
data yang hilang.
c. Througput
Seperti yang telah dijelaskan pada bab 3, througput adalah besar
kecepatan data terkirim secara real. Maka untuk menemukan througput
dilakukan dengan cara memsukkan jumlah data diterima selanjutnya
dibagi dengan lama waktu pengamatan.
Maksud dari rumus diatas adalah :
Jumlah data masuk : keseluruhan data yang masuk dari ke 2 node
Jumlah tiap packet data : dalam ngeritimkan 1 buah paket data terdapat
± 8 charakter
Besar pengiriman data : sebuah karakter terbentuk dari 10 bit data,
yaitu 8 bit untuk setiap charatcter, 1 bit prmnbuka data dan juga 1 bit
57 BAB IV
HASIL PENGUJIAN DAN PENGAMATAN
Dalam bab ini penulis akan menguraikan dan menjelaskan beberapa hasil
pengujian dari hasil penelitian tugas akhir ini. Pengujian yang dilakukan meliputi
pengujian perangkat lunak (software) dan kinerja keseluruhan sistem, serta analisa
hasil transmisi data dari node ke coordinator.
4.1 Pengujian Xbee
Pengujian Xbee dilakukan dengan menggunakan program X-CTU.
Program X-CTU merupakan open source yang digunakan untuk menkonfigurasi
awal Xbee.
4.1.1 Tujuan
Pengujian ini dilakukan untuk mengetahui apakah Xbee yang digunakan
dapat berfungsi dengan baik atau tidak.
4.1.2 Alat yang digunakan
Untuk melakukan percobaan ini maka diperlukan beberapa alat sebagai
berikut.
a. Usb adapter
b. Xbee adapter
c. Xbee
d. Komputer/ laptop
4.1.3 Prosedur Pengujian
Prosedur pengujian alat :
a. Hubungkan xbee adapter dengan kabel usb adapter.
b. Nyalakan komputer kemudian hubungkan kabel usb adapternya ke
komputer/laptop.
c. Buka software X-CTU dan tekan tombol “ Test / Query” pada tab “PC
Setting”.
d. Maka akan muncul dialog yang dapat mengetahui apakah Xbee yang
[image:64.595.92.507.221.654.2]digunakan dapat terbaca oleh X-CTU atau tidak.
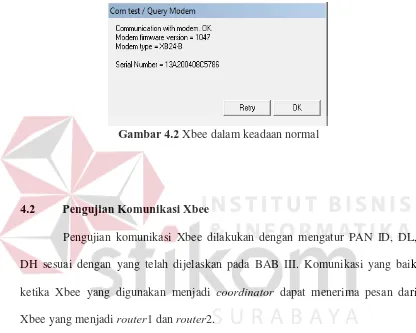
4.1.4 Hasil Pengujian
Pada Gambar 4,2 tertulis “Communication with Modem OK ” hal ini
menandakan bahwa Xbee yang digunakan dapat berkomunikasi dengan X-CTU.
[image:65.595.93.509.201.534.2]Dengan demikian maka Xbee dapat digunakan pada pengerjaan tugas akhir ini.
Gambar 4.2 Xbee dalam keadaan normal
4.2 Pengujian Komunikasi Xbee
Pengujian komunikasi Xbee dilakukan dengan mengatur PAN ID, DL,
DH sesuai dengan yang telah dijelaskan pada BAB III. Komunikasi yang baik
ketika Xbee yang di