PENYELESAIAN PEMROGRAMAN SEPARABEL MENGGUNAKAN FUNGSI LINIERPIECEWISE DENGAN FORMULASI DELTA
SKRIPSI
RINI ANDRIA NINGSIH
060803004
DEPARTEMEN MATEMATIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
UNIVERSITAS SUMATERA UTARA
LINIERPIECEWISE DENGAN FORMULASI DELTA
SKRIPSI
Diajukan untuk melengkapi tugas dan memenuhi syarat mencapai gelar Sarjana Sains
RINI ANDRIA NINGSIH 060803004
DEPARTEMEN MATEMATIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATERA UTARA
i
PERSETUJUAN
Judul : PENYELESAIAN PEMROGRAMAN SEPARABEL MENGGUNAKAN
FUNGSI LINIERPIECEWISE DENGAN FORMULASI DELTA
Kategori : SKRIPSI
Nama : RINI ANDRIA NINGSIH
Nomor Induk Mahasiswa : 060803004
Program Studi : SARJANA (S1) MATEMATIKA
Departemen : MATEMATIKA
Fakultas : MATEMATIKA DAN ILMU PENGETAHUAN ALAM (FMIPA) UNIVERSITAS SUMATERA UTARA
Diluluskan di Medan, Januari 2011
Komisi Pembimbing:
Pembimbing 2 Pembimbing 1
Drs. Suwarno Ariswoyo, M.Si Drs.Faigiziduhu Bu’ulolo, M.Si NIP.19500321 198003 1 001 NIP. 19531218 198003 1 003
Diketahui/ Disetujui oleh:
Departemen Matematika FMIPA USU Ketua,
Prof. Dr. Tulus, M.Si
PERNYATAAN
PENYELESAIAN PEMROGRAMAN SEPARABEL MENGGUNAKAN FUNGSI LINIERPIECEWISE DENGAN FORMULASI DELTA
SKRIPSI
Saya mengakui bahwa skripsi ini adalah hasil kerja saya sendiri, kecuali beberapa kutipan dan ringkasan yang masing-masing disebutkan sumbernya.
Medan, Januari 2011
iii
PENGHARGAAN
Puji dan Syukur penulis panjatkan kepada Tuhan Yang Maha Pengasih dan Maha Penyayang, dengan limpah karunia-Nya kepada penulis selama dalam proses penyelesaian skripsi ini.
Skripsi ini disusun sebagai salah satu syarat untuk memperoleh gelar sarjana Matematika pada Fakultas Matematika dan Ilmu Pengetahuan Alam, Universitas Sumatera Utara. Skripsi ini merupakan hasil dari studi literatur yang telah dikerjakan penulis, dengan judul ” PENYELESAIAN PEMROGRAMAN SEPARABEL MENGGUNAKAN FUNGSI LINIERPIECEWISE DENGAN FORMULASI DELTA”.
Penulis menyadari selama pengerjaan penulisan ini masih menemukan banyak kesulitan yang disebabkan oleh terbatasnya ilmu yang penulis miliki. Karena itu penulis menyadari tanpa bantuan dari berbagai pihak tidaklah mungkin skripsi ini dapat diselesaiakan dengan baik.
Pada kesempatan ini, penulis ingin menyampaikan ucapan syukur dan terima kasih kepada:
1. Bapak Drs. Faigiziduhu Bu’ulolo, M.Si selaku dosen pembimbing I yang telah memberikan banyak bimbingan dan arahan dalam penulisan skripsi ini.
2. Bapak Drs. Suwarno Ariswoyo, M.Si selaku dosen pembimbing II atas bantuan dan penjelasan yang diberikan demi selesainya skripsi ini.
3. Bapak Drs. H. Haludin Panjaitan dan Ibu Dra. Elly Rosmaini, M.Si selaku komisi penguji atas masukan dan saran yang telah diberikan demi perbaikan skripsi ini.
4. Bapak Prof. Dr. Tulus, M.Si selaku ketua jurusan departemen matematika FMIPA USU. 5. Bapak Dr. Sutarman, M.Sc selaku Dekan FMIPA USU.
6. Semua Dosen Departemen Matematika FMIPA USU dan Pegawai FMIPA USU yang tidak bisa disebutkan satu persatu.
disebutkan satu persatu, spesial buat Muhammad Yudha Azlan, yang sangat banyak membantu, selalu menyemangati, dan mendukung selama proses pengerjaan skripsi ini.
9. Buat keluarga terkasih Ibu Suriyana, Bapak Supriadi, sepupu-sepupu penulis Sari, Didiek, Dinna, Teguh, Tiwi, Reza, dan seluruh keluarga besar lainnya yang namanya tidak bisa disebutkan satu persatu, atas motivasi serta doa yang sangat berarti dalam hidup penulis.
Penulis menyadari bahwa masih banyak kekurangan dalam menyelesaikan skripsi ini. Oleh karena itu penulis mengharapkan masukan dan kritikan yang bersifat membangun demi kesempurnaan skripsi ini.
Medan, Januari 2011
v
PENYELESAIAN PEMROGRAMAN SEPARABEL MENGGUNAKAN FUNGSI LINIERPIECEWISE DENGAN FORMULASI DELTA
ABSTRAK
SOLUTION OF SEPARABLE PROGRAMMING USE PIECEWISE LINEAR FUNCTION WITH DELTA FORMULATION
ABSTRACT
vii
DAFTAR ISI
Halaman
Persetujuan i
Pernyataan ii
Penghargaan iii
Abstrak v
Abstract vi
Daftar Isi vii
Daftar Gambar ix
Daftar Tabel x
Bab 1 PENDAHULUAN 1
1.1 Latar Belakang 1
1.2 Perumusan Masalah 4
1.3 Pembatasan Masalah 4
1.4 Tujuan Penelitian 4
1.5 Manfaat Penelitian 4
1.6 Metodologi Penelitian 5
1.7 Tinjauan Pustaka 5
Bab 2 LANDASAN TEORI 8
2.1 Teori-Teori Pendukung 8
2.1.1 Ruas Garis 8
2.1.2 Pemrograman tak linier 9
2.1.3 Fungsi Kontinu 9
2.1.4 Solusi Fisibel dan Solusi Optimal 9
2.1.5 Himpunan Buka 10
2.1.6 Global Optimal 10
2.1.8 Fungsi Konveks 10
2.1.9 Fungsi Konkaf 11
2.1.10 Teknik Batas Atas 12
2.2 Metode Simpleks dan Metode Simpleks untuk Variabel Terbatas 13
2.2.1 Metode Simpleks 13
2.2.2 Metode Simpleks untuk Variabel Terbatas 14
Bab 3 PEMBAHASAN 15
3.1 Pemrograman Separabel 15
3.2 Pemrograman Separabel dengan Menggunakan Hampiran Fungsi Linier Piecewise 16
3.3 Formulasi Lambda dan Formulasi Delta 17
3.3.1 Formulasi Lambda 17
3.3.2 Formulasi Delta 20
3.4 Menyelesaikan Persoalan Pemrograman Separabel dengan Menggunakan Fungsi Linier Piecewise dengan Formulasi Delta 23
Bab 4 KESIMPULAN DAN SARAN 28
4.1 Kesimpulan 28
4.2 Saran 29
ix
DAFTAR GAMBAR
Halaman
Gambar 2.1 Fungsi konveks dan fungsi konkaf pada pemrograman separabel 12
Gambar 3.1 Fungsi perkiraan linear putus-bersambung 16
Gambar 3.2 Memperkirakan f x1( )1 pada panel A, dan f x2( )2 pada panel B dengan fungsi linear
putus-bersambung 20
Gambar 3.3 Fungsi Linear putus bersambung sebagai hampiran fungsi nonlinear dengan formulasi delta 22
DAFTAR TABEL
v
PENYELESAIAN PEMROGRAMAN SEPARABEL MENGGUNAKAN FUNGSI LINIERPIECEWISE DENGAN FORMULASI DELTA
ABSTRAK
SOLUTION OF SEPARABLE PROGRAMMING USE PIECEWISE LINEAR FUNCTION WITH DELTA FORMULATION
ABSTRACT
BAB 1
PENDAHULUAN
1.1. Latar Belakang
Dalam keadaan dimana menghadapi persoalan program linier yang besar, maka akan berusaha untuk mencari penyelesaian optimal dengan menggunakan algoritma komputasi, seperti algoritma simpleks dengan biaya sekecil mungkin. Salah satu variasi model program linier adalah pemrograman separabel.
Pemrograman separabel adalah pemrograman tak linear yang fungsi objektif dan fungsi kendalanya dapat diekspresikan sebagai penjumlahan fungsi dan setiap fungsinya hanya terdiri atas satu variabel.
Secara umum model dasar dari suatu pemrograman separabel adalah sebagai berikut:
Optimumkan
1 2
1
, ,...,
n
n j j
j
Z f x x x f x
Fungsi kendala :
1 2
1
, ,...,
n
i n ij j i
j
g x x x g x atau b
0 j x Untuk i = 1,2,..,m
j = 1,2,..,n
Pemrograman separabel hanya digunakan untuk menganalisis persoalan-persoalan yang memiliki fungsi-fungsi kontinu dengan perubahan gradien yang kecil. Jika fungsi kontinu mengalami perubahan besar pada gradiennya, maka dapat menerapkan program integer tercampur. Sifat lainnya adalah pemrograman separabel memberikan optimum pada fungsi nonlinear, sedangkan program integer dapat memberikan global optimum.
Pada umumnya masalah pemrograman separabel dapat diselesaikan dengan menggunakan kondisi Karush-Kuhn-Tucker. Selain itu dapat juga diselesaikan dengan menggunakan hampiran fungsi linier piecewise, atau dengan metode lain seperti metode cutting plane, program dinamik, dan lain-lain.
Pada tulisan ini akan membahas masalah pengoptimuman yang menghampiri masalah pemrograman separabel. Hampiran dilakukan dengan mengganti setiap fungsi nonlinier dengan fungsi linierpiecewise.
Suatu fungsi tujuan f xj( j) dalam pemrograman separabel dikatakan putus-bersambung (piece-wise) karena segmen-segmen dari fungsi f xj( j) tersebut secara sendiri-sendiri (terputus-putus) dipisah-pisahkan dan membentuk fungsi yang linier sehingga diperoleh f x1( ),1 f x2( ),2 f x3( )3 , dan seterusnya. Jika fungsi yang diputus-putus tersebut disambung, maka hasilnya diperkirakan akan mendekati fungsi nonlinier.
Pada pemrograman separabel, ada tiga kondisi yaitu fungsi tujuannya nonlinier, fungsi kendalanya linier, atau fungsi tujuan dan kendalanya nonlinier. Sehingga pada ketiga kondisi tersebut dapat diganti dengan fungsi linier yang dianggap sama atau mendekati keadaan nonlinier, yaitu dengan cara membagi suatu bidang fungsi nonlinier menjadi beberapa sub bidang atau segmen.
3
Penyelesaian masalah hampiran fungsi linier piecewise dapat juga diselesaikan metode simpleks dengan restricted basis entry rule (variabel terbatas). Jika fungsi objektifnya merupakan fungsi konveks sempurna dan fungsi kendalanya merupakan konveks, maka aturan variabel terbatas pada metode simpleks dapat dihilangkan dan bisa digunakan hanya dengan metode simpleks biasa.
Keakuratan dari hampiran fungsi linier piecewise dipengaruhi oleh banyaknya titik kisi. Jika titik kisi bertambah, maka variabel pada masalah hampiran pemrograman linier akan bertambah. Untuk mengatasi hal tersebut, dapat digunakan modifikasi metode hampiran yang menggunakan sedikit titik kisi diawal perhitungan.
Misalkan f x( ) dan g x( ) memenuhi semua asumsi dari pemrograman separabel dan fungsi linier bagian demi bagian yang diperoleh, dapat dituliskan kembali sebagai fungsi linier dengan menghapus indeks khusus pada suatu model pemrograman linier, maka penyelesaian optimalnya secara otomatis memenuhi suatu batasan yang diberikan.
Cara efisien dan cepat untuk menyelesaikan model tersebut adalah dengan menggunakan jenis tertentu dari metode simpleks yang berhubungan dengan batas atas kendala. Kemudian setelah memperoleh suatu penyelesaian optimal dari model tersebut, maka hitunglah secara berurutan
1
nj
j jk
k
x x
, dengan j=1,2,...,n untukmelihat penyelesaian yang optimal dari pemrograman separabel sebelumnya (yang didekati secara bagian demi bagian).
Dari uraian di atas, maka penulis memilih judul ” Penyelesaian
Pemrograman Separabel Menggunakan fungsi linier Piecewise dengan
1.2. Perumusan Masalah
Permasalahan yang akan diuraikan dalam tulisan ini adalah bagaimana cara mengoptimumkan masalah pada pemrograman separabel. Di mana pada pemrograman ini, fungsi yang nonlinier dapat diselesaikan dengan hampiran fungsi linier piecewise
dengan menggunakan formulasi delta.
1.3. Pembatasan Masalah
Ada dua cara untuk memformulasikan fungsi linier piecewise, yaitu dengan formulasi lambda dan formulasi delta. Pada formulasi lambda, variabel didefinisikan untuk setiap titik kisi, sedangkan formulasi delta, variabel didefinisikan untuk setiap interval diantara titik kisi.
Akan tetapi pada tulisan ini untuk membatasi persoalan, maka hanya akan membahas fungsi linier piecewise dengan formulasi delta. Karena, untuk formulasi lambda telah dibahas pada tulisan sebelumnya.
1.4. Tujuan Penelitian
Tujuan penelitian dari penulisan ini adalah menyelesaikan permasalahan pemrograman separabel dengan hampiran fungsi linier piecewise dengan menggunakan formulasi delta tanpa harus mengabaikan kendala yang ada, kemudian mengoptimalkan fungsi tujuan dari pemrograman separabel.
1.5. Manfaat Penelitian
5
yang dimaksud adalah memaksimumkan atau meminimumkan fungsi tujuan dari pemrograman separabel.
1.6. Metode Penelitian
Untuk melancarkan penelitian ini, maka metode yang dilakukan adalah dengan studi literatur. Oleh karena itu, ada beberapa tahap yang dilakukan dalam pemecahan masalah yang dihadapi, yaitu:
1. Menjelaskan pengertian dasar pemrograman separabel,
2. Menjelaskan pemrograman separabel dengan menggunakan hampiran fungsi linier piecewise,
3. Menjelaskan pengertian formulasi lambda dan formulasi delta,
4. Menyelesaikan suatu masalah sebagai aplikasi dari hampiran fungsi linier
piecewise dengan formulasi delta.
1.7. Tinjauan Pustaka
Hiller dan Liberman (1990) mengatakan pemrograman separabel dapat diasumsikan bahwa fungsi objektif f x( ) disebut konkaf, dan fungsi konstrain g xi( ) disebut konfek merupakan fungsi-fungsi dari pemrograman separabel. Model dasar program separabel adalah sebagai berikut:
Optimumkan ( maksimumkan atau minimumkan ):
1 2
1
, ,...,
n
n j j
j
Z f x x x f x
Fungsi kendala :
1 2
1
, ,...,
n
i n ij j i
j
g x x x g x atau b
0 j x
Contoh :
Min Z 30x135x2 212 3x22
Kendala 2 2
1 2 2 250
x x
1 2 20
x x
1, 2 0
x x
Untuk persoalan pengoptimuman contoh tersebut yang merupakan sebuah persoalan pemrograman separabel dengan :
2
1 1 1 1
2
11 1 1
21 1 1
1
( ) 30 2 ( )
( ) 250
f x x x
g x x g x x b 2
2 2 2 2
2
12 2 2
22 2 2
2
( ) 35 3 ( ) 2 ( )
20
f x x x
g x x g x x b
B.D. Nasendi dan Affendi Anwar (1984) menjelaskan jenis-jenis variasi model program linier, menjelaskan pengertian program separabel dan model dasar dari suatu pemrograman separabel. Fungsi f(x) dikatakan dapat dipisahkan (separabel) jika dapat menuliskan fungsi tersebut sebagai jumlah dari n buah fungsi yang terpisah-pisah. Secara sistematis, pernyataan tersebut adalah sebagai berikut:
1 2
( ) ( , ,..., n)
Z f x f x x x adalah separabel, Jika f x x( ,1 2,...,xn) f x1( )1 f x2( ) ...2 f xn( n)
Suatu fungsi tujuan f xj( j) dalam program separabel disebut putus-bersambung (piece-wise) karena segmen-segmen dari fungsi f xj( j) tersebut secara sendiri-sendiri, dipisah-pisahkan dan membentuk fungsi yang linier sehingga dapat
1( ),1 2( ),2 3( )3
f x f x f x , dan seterusnya. Jika fungsi yang diputus-putus tadi disambung, maka hasilnya diperkirakan akan mendekati fungsi nonlinier.
7
nonlinier ke dalam beberapa sub-bidang, ada dua cara untuk memformulasikan fungsi linier putus-bersambung, yaitu dengan formulasi lambda dan formulasi delta.
Buku lain karangan Winston (1995) menjelaskan bahwa fungsi yang didefinisikan oleh rumus yang berlainan dibagian yang berbeda dari daerah asalnya dinamakan fungsi putus-bersambung.
LANDASAN TEORI
Untuk mempermudah dalam menyelesaikan pembahasan pada bab ini, maka akan diberikan beberapa definisi dan beberapa teori dasar yang mendukung.
2.1. Teori – Teori Pendukung
2.1.1. Ruas Garis
Definisi 1. Ruas Garis
Jika ada di R2 atau R3, maka sebuah garis pada Rn dibentuk dari dua titik. Pada R2
garis yang menghubungkan dua buah titik yakni x1 dan x2 dapat diekspresikan sebagai himpunan dari semua titik x, yang memenuhi:
2 ( 1 2) 1 (1 ) 2
x x x x x x
Jika x1 dan x2 merupakan titik-titik yang berada di n
R , maka garis yang menghubungkan x1 dan x2 adalah himpunan dari semua titik yang terdapat pada himpunan
1 { 1 (1 ) ,2
L x xx x dengan 0}
dengan catatan untuk 0, xx2 dan untuk 1, xx1. Sehingga untuk 0 1, didapat x merupakan titik yang terdapat pada garis L1 yang mana berada diantara x1 dan x2. Sehingga dapat didefinisikan bahwa ruas garis yang berada diantara x1 dan x2adalah himpunan titik pada
2 { 1 (1 ) 2
9
2.1.1. Pemrograman Tak Linier
Secara umum, masalah pemrograman tak linear adalah menentukan g xi( ) sehingga ( )
f x maksimum/minimum, dengan kendala g xi( )bi untuk setiap i1, 2,...,m dan 0
x , di mana fungsi f x( ) dan fungsi g xi( ) merupakan fungsi-fungsi dengan n
peubah.
2.1.2. Fungsi Kontinu
Jika f didefinisikan pada himpunan bagian D dari Rn, maka
lim
( ) x af x L
bermakna bahwa untuk setiap bilangan 0 terdapat sebuah bilangan terkait 0 sedemikian rupa sehingga f x( ) L bilamana xD dan 0 x a .S
[James Stewart, 2008]
2.1.3. Solusi Fisibel dan Solusi Optimal
Definisi 2. Solusi Fisibel
Misalkan diberikan masalah pengoptimuman Min (Maks) f x( ), terhadap ( )
g x p; x0, dengan xRn. Maka solusi fisibel dari masalah pengoptimuman tersebut adalah nilai yang memenuhi kendala g x( ) p x; 0.
[Rao, 1985]
Definisi 3. Solusi Optimal
Solusi optimal adalah solusi fisibel yang mengoptimumkan fungsi objektif (tujuan).
2.1.4. Himpunan Buka
Himpunan GRn dikatakan terbuka di Rn jika x G terdapat bilangan real r0 sehingga y Rn yang memenuhi x y r adalah anggota G.
Catatan:
Di , ( ,1 2,...,
n
n
R x x x didefinisikan sebagai x12 x22 ... xn2 .
[Bartle, 1976]
2.1.5. Global Optimal
Jika f merupakan suatu fungsi konveks yang selalu berbeda, kemudian kondisinya penting dan cukup untuk x* menjadi suatu global optimal atas f pada Rn adalah
*
( ) 0
f x
.
2.1.6. Gradien
Jika f adalah fungsi dua variabel x dan y, maka gradien f adalah fungsi vektor f yang didefinisikan oleh f x y( , ) f x yx( , ), f x yy( , ) f i f j
x y
[James Stewart, 2008]
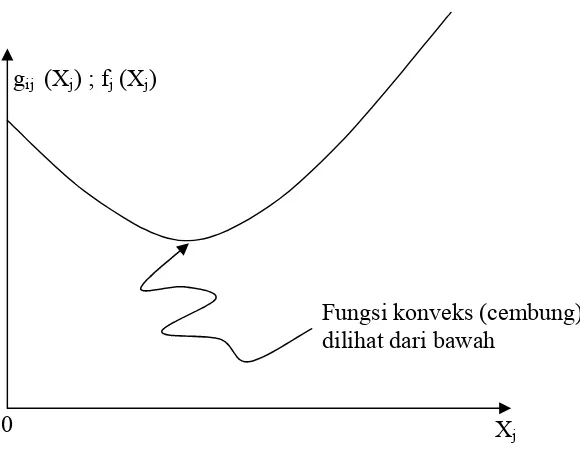
2.1.7. Fungsi Konveks
1 2
( , ,..., n)
f x x x adalah fungsi konveks jika, untuk setiap pasangan titik pada grafik
1 2
( , ,..., n)
11
Disebut fungsi konveks sempurna jika segmen garis berada seluruhnya di atas grafik kecuali pada titik akhir (endpoint) segmen garis.
Ada dua sifat penting fungsi konveks, yaitu:
Jika f x x( ,1 2,...,xn) adalah fungsi konveks, maka
1 2 1 2
( , ,..., n) ( , ,..., n)
g x x x f x x x adalah fungsi konkaf, dan sebaliknya. Penjumlahan fungsi – fungsi konveks adalah fungsi konveks.
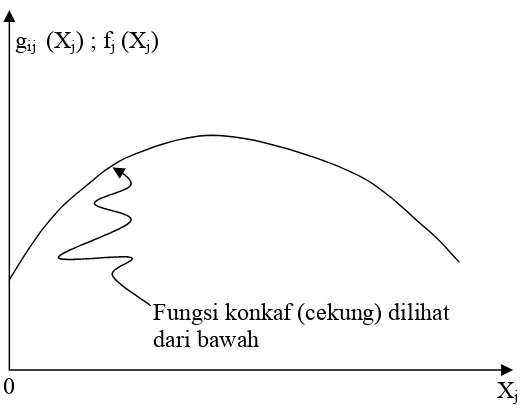
2.1.8. Fungsi Konkaf
1 2
( , ,..., n)
f x x x adalah fungsi konkaf jika untuk setiap pasangan titik pada grafik
1 2
( , ,..., n)
f x x x , segmen garis yang menggabungkan kedua titik tersebut berada di bawah atau pada grafik f x x( ,1 2,...,xn).(lihat gambar 2.2).
Disebut fungsi konkaf sempurna jika segmen garis berada seluruhnya di bawah grafik kecuali pada titik akhir (endpoint) segmen garis.
Gambar 2.1. fungsi konkaf pada pemrograman separabel Fungsi konkaf (cekung) dilihat
dari bawah
0 Xj
Gambar 2.2. fungsi konveks pada pemrograman separabel
2.1.9. Teknik Batas Atas
Teknik batas atas memberikan suatu cara untuk menyempurnakan metode simpleks untuk situasi yang lazim di mana banyak atau semua variabel mempunyai batas-batas atas secara eksplisit. Teknik ini memberikan kemudahan untuk menyelesaikan masalah-masalah besar. Pada umumnya kendala batas atas yaitu:
1 2
1 2 1
...
( ... )
j j jk i
j j jk
j i
x x x b
atau x x x b atau
x b
Fungsi konveks (cembung) dilihat dari bawah
0 Xj
13
2.2. Metode Simpleks dan Metode Simpleks untuk Variabel Terbatas
2.2.1. Metode Simpleks
Metode sinpleks merupakan algoritma yang efisien untuk menyelesaikan persoalan-persoalan pemrograman linier.
Diberikan pemrograman linier dalam bentuk standart: Min Z C xT
Terhadap Axb 0 x
Langkah-langkah iterasi formal dari metode simpleks adalah sebagai berikut: Langkah 1 : Dengan menggunakan bentuk standar (dengan sisi kanan semua
nonnegatif), tentukan pemecahan dasar awal yang layak.
Langkah 2 : Pilih variabel masuk dari antara variabel nondasar dengan menggunakan kondisi optimalitas.
Langkah 3 : Pilih variabel keluar dari variabel dasar saat ini dengan menggunakan kondisi kefisibelan.
Langkah 4 : Tentukan nilai variabel yang baru dengan membuat variabel masuk tersebut dengan variabel dasar dan variabel keluar sebagai variabel nondasar, kemudian kembali ke langkah 2.
Catatan:
Kondisi Optimalitas : Variabel masuk dalam maksimisasi (minimisasi) adalah variabel nondasar dengan koefisien yang paling positif (negatif) dalam persamaan tujuan. Koefisien dengan nilai yang sama dapat diplih secara sembarang. Nilai optimum dicapai ketika semua koefisien nondasar dalam persamaan tujuan adalah nonpositif (nonnegatif).
2.2.2. Metode Simpleks Untuk Variabel Terbatas
Diberikan pemrograman linier dalam bentuk standart: Min Z C xT
Terhadap Axb 0 x 1
Berikut adalah langkah-langkah iterasi formal dari metode simpleks untuk variabel terbatas:
Langkah 1: Pemrograman linier dalam bentuk kanonik
Langkah 2: pilih kolom pivot, koefisien objektif paling positif (sebagai calon variabel basis), misalkan xs
1. Jika Us t1 t2: maka rasio test 1 min , 0
i is is b t a a
2. Jika ais 0 : maka rasio batas atas 2 min k i, 0 is is U b t a a
dengan Uk adalah batas atas variabel basis xk pada kendala ke-i.
Langkah 3: xs min
U t tk, ,1 2
dengan Us adalah batas atas variabel xs. Langkah 4: Jika minimumnya:i. Us, substitusikan batas atas untuk xs(atau xs) dan xs tetap variabel nonbasis.
Catatan : substitusikan batas atas xj xj Uj xj Uj xj ii.t1, pivot seperti biasa dan xs variabel basis, xs variabel nonbasis.
iii. t2, substitusikan batas atas untuk variabel basis xk (atau xk) dan xs masuk sebagai basis.
BAB 3
PEMBAHASAN
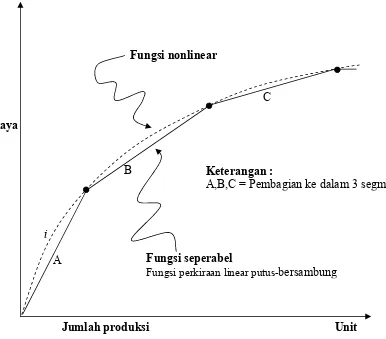
3.1. Pemrograman Separabel
Pemrograman separabel merupakan bentuk atau variasi khusus dari pemrograman nonlinier di mana pada fungsi objektif dan funsi kendalanya dapat dinyatakan sebagai penjumlahan n-fungsi dan pada setiap fungsinya terdiri dari satu variabel. Dalam pemrograman ini, pada fungsi nonlinier dapat digantikan oleh sebuah fungsi linier yang diperkirakan mendekati keadaan fungsi nonlinier semula. (Lihat gambar 3.1).
Gambar 3.1. fungsi perkiraan linear putus-bersambung
Fungsi nonlinear
A
B
C
Fungsi seperabel
Fungsi perkiraan linear putus-bersambung
Jumlah produksi Unit
Biaya
Keterangan :
A,B,C = Pembagian ke dalam 3 segmen
Bentuk umum pemrograman separabel adalah: Optimumkan ( maksimumkan atau minimumkan ):
1 2
1
, ,...,
n
n j j
j
Z f x x x f x
Fungsi kendala :
1 2
1
, ,...,
n
i n ij j i
j
g x x x g x atau b
0 j x Untuk i = 1,2,..,m
j = 1,2,..,n
3.2. Pemrograman Separabel dengan Menggunakan Hampiran Fungsi Linier
Piecewise
Suatu fungsi tujuan f xj( j) dalam program separabel disebut putus-bersambung (piece-wise) karena segmen-segmen dari fungsi f xj( j) tersebut secara sendiri-sendiri, dipisah-pisahkan dan membentuk fungsi yang linier sehingga dapat
1( ),1 2( ),2 3( )3
f x f x f x , dan seterusnya. Jika fungsi yang diputus-putus tadi disambung, maka hasilnya diperkirakan akan mendekati fungsi nonlinier.
Contoh :
Maksimumkan Z= 12 6 1 22 8 2 1 3 2 x x x x x
Kendala
1 2 3
2
1 2
1 2 3
5 3 , , 0
x x x
x x
x x x
Masalah tersebut adalah merupakan persoalan separabel, yaitu:
2
1 1 1 1
11 1 1
2
( ) 6
( ) ( )
f x x x
g x x
g x x
2
2 2 2 2
12 2 2
( ) 8
( ) ( )
f x x x g x x
g x x
3 3 3
13 3 3
1 ( )
2 ( ) ( ) 0
f x x
g x x g x
17
Untuk persoalan tersebut pada fungsi nonlinier dapat dihampiri oleh fungsi linier piecewise. Bila dimisalkan merupakan fungsi kontinu dengan variabel pada interval [a,b], akan didefinisikan fungsi linier piecewise merupakan hampiran dari fungsi pada [a,b].
Pada pemrograman separabel, ada tiga kondisi yaitu fungsi tujuannya nonlinier, fungsi kendalanya linier, atau fungsi tujuan dan kendalanya nonlinier. Sehingga pada ketiga kondisi tersebut dapat diganti dengan fungsi linier yang dianggap sama atau mendekati keadaan nonlinier, yaitu dengan cara membagi suatu bidang fungsi nonlinier menjadi beberapa sub bidang. Setelah itu, ada dua cara untuk memformulasikan fungsi linier piecewise, yaitu dengan formulasi lambda dan formulasi delta.
3.3. Formulasi Lambda dan Formulasi Delta
3.3.1. Formulasi Lambda
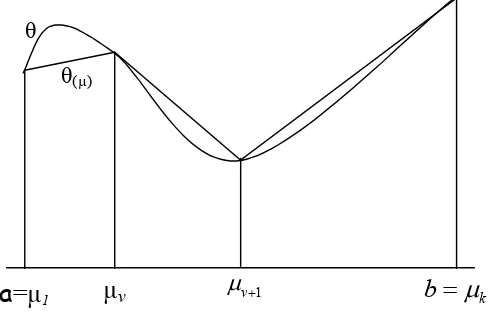
Misalkan merupakan fungsi kontinu dengan variabel pada interval [a,b]. Apabila interval [a,b] dipartisi menjadi interval-interval yang lebih kecil, dengan titik partisi (grid point) a 1, 2,...,k b seperti pada gambar 3.3.1.a. pada pengambilan titik-titik kisi ini tidak harus berjarak sama.
Perhatikan fungsi nonlinier pada interval
v, v1
akan dihampiri dengan cara sebagai berikut: misalkan v (1 ) v1 untuk
0,1 . Dari definisi 1, adalah titik kisi pada ruas garis yang menghubungkan v dan v1, maka:
^
1
( ) ( v) (1 ) ( v )
Gambar 3.3.1.a. Fungsi linier piecewise sebagai hampiran nonlinier.
Hampiran suatu fungsi nonlinier dengan fungsi linier piecewise dipengaruhi oleh banyaknya titik kisi. Perhatikan gambar berikut:
Gambar 3.3.1.b. Fungsi linier piecewise sebagai hampiran fungsi nonlinier dengan titik kisi
Dari gambar tersebut terlihat bahwa, jika semakin banyak titik kisi yang diambil maka diperoleh hampiran yang lebih baik.
Perhatikan contoh ilustrasi berikut:
Diberikan fungsi ( ) 2. Grafik dari fungsi pada interval [-2,2]. Perhatikan gambar 3.3.1.c berikut.
θ
a =µ1 µv µ µv+1 b =µk
^
( )
k b
1
v
θ
µv
θ(µ)
19
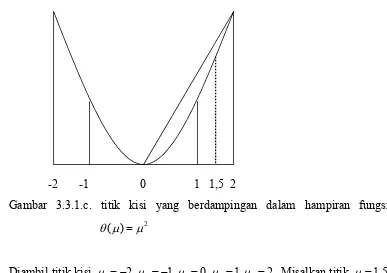
-2 -1 0 1 1,5 2
Gambar 3.3.1.c. titik kisi yang berdampingan dalam hampiran fungsi
2
( )
Diambil titik kisi 1 2,2 1,3 0,4 1,5 2. Misalkan titik 1,5 dituliskan kombinasi konveks 1(1) 1(2)
2 2 dengan titik kisi 4 1,5 2, maka terdapat dua v positif dan berdampingan, sehingga (1,5)2, 25 dan
1 1
(1,5) (1) (2) 2,5
2 2
.
Misalkan titik 1,5 dituliskan kombinasi konveks 1(0) 3(2)
4 4 dengan titik kisi 3 0,5 2, maka terdapat dua v positif dan berdampingan, sehingga
(1,5) 2, 25
dan (1,5) 1 (0) 3 (2) 3
4 4
.
Misalkan titik 1,5 dituliskan kombinasi konveks 1(0) 1(1) 4(2) 6 6 6
dengan titik kisi 3 0,4 1 dan 5 2. Pada kasus ini terdapat tiga v positif dan ketiga titik kisinya saling berdampingan, maka (1,5)2, 25 dan
1 1 4
(1,5) (0) (1) (2) 2,83
6 6 6
[image:33.595.135.522.94.367.2]Misalkan titik 1,5 dituliskan kombinasi konveks 1( 1) 1(1) 6(2) 8 8 8
dengan titik kisi 2 1,4 1 dan 5 2. Pada kasus ini terdapat tiga v positif dimana ada dua titik kisinya berdampingan dan lainnya tidak, maka (1,5)2, 25 dan
^ 1 1 6
(1,5) ( 1) (1) (2) 3,125
8 8 8
.
Hasil dari ilustrasi tersebut dapat dilihat bahwa jika titik tidak merupakan kombinasi konveks dari yang paling banyak dua titik kisi dengan v 0 yang berdampingan, maka hampiran yang diperoleh tidak lebih baik dibandingkan dengan bila titik merupakan kombinasi konveks dari dua titik kisi dengan v 0 yang berdampingan.
Pada umumnya fungsi nonlinier pada interval [a,b] dapat dihampiri pleh fungsi linier piecewise dengan titik kisi 1, 2,...,k yang didefinisikan sebagai:
1 ( ) ( ), k v v v
1 1, k v v
v 0 dengan1 k v v v
untuk v1, 2,...,k, danpaling banyak dua v bernilai positif dan jika ada dua v 0 maka kedua titik kisi yang berpadanan dengan v tersebut harus berdampingan.
3.3.2. Formulasi Delta
21
Perhatikan fungsi nonlinear f pada interval [a,b]. Pada formulasi delta akan dihampiri dengan cara sebagai berikut:
1
v v v
,
1
( ) ( )
v v v
f f f
.
Misalkan 0
1 ( ) p v v v
, maka:0 1 ( ) ( ) ( ) p v v v
f f f
0 v 1 untuk v1, 2,...,p
Perhatikan ilustrasi berikut;
Misalkan didefinisikanL{j fj dan gij adalah fungsi linier untuk 1, 2,..., }
i m . Didefinisikan titik-titik kisi xvj untuk v1, 2,...,kj. Pada interval ,
j j a b
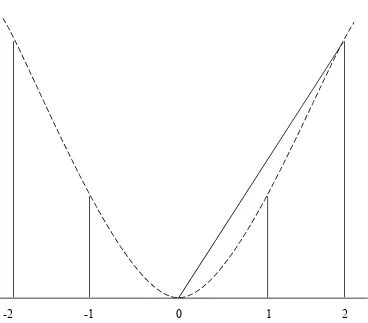
dengan a bj, j 0 untuk setiap jL. Diberikan fungsi f yang didefinisikan sebagai f( ) 2. Grafik fungsi f pada intrval [-2,2] diperlihatkan pada gambar 3.3.2.b.
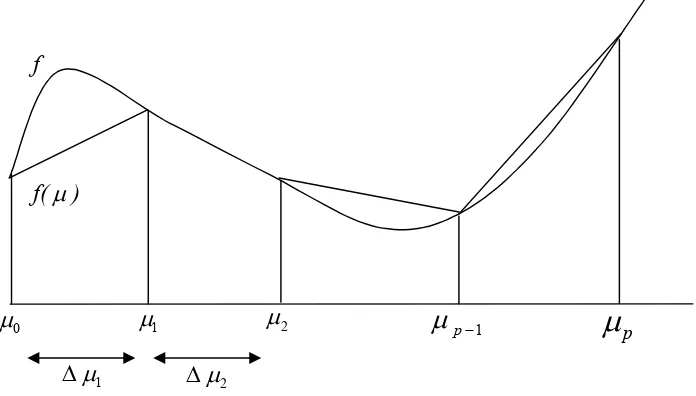
Gambar 3.3.2.a. Fungsi Linear Piecewise sebagai hampiran fungsi nonlinear dengan formulasi delta.
f
f()
0
1 2
∆1 ∆2
p
1 p
[image:35.595.166.514.469.667.2]Gambar 3.3.2.b. Pentingnya paling banyak satu v yang nilainya 0 1
Misalkan titik kisi yang digunakan adalah
0 2, 1 1, 2 0, 3 1, 4 2
dan 1 1, 2 1, 3 1, 4 1. Maka titik 1
4
dituliskan sebagai 2 (1)1 1(1) (1)1 (1)0 4
, dengan
1 2 3 4
1
1, 1, , 0
4
. Pada kasus ini terdapat suatu v yang nilainya 0 v 1.
Maka 1 1
4 16 f
dan nilai hampirannya adalah
1 1 1
4 ( 3)1 ( 1)1 (1) (3)0
4 4 4
f
.
23
3.4. Menyelesaikan Persoalan Pemrograman Separabel dengan Menggunakan
Fungsi Linier Piecewisedengan Formulasi Delta
Diberikan masalah pemrograman separabel sebagai berikut: Maks 12 6 1 22 8 2 1 3
2 Z x x x x x
Terhadap
1 2 3
2
1 2
1 2 3
5 3 , , 0
x x x
x x
x x x
Perhatikan bahwa L={3}, oleh karena itu titik kisi tidak digunakan untuk x3. Dari kendala–kendala dapat diketahui bahwa x x1, 2, dan x3 terletak pada interval [0,5]. Maka titik–titik kisi yang digunakan adalah 0,2,4,5. sehingga :
11 0
x ,x21 2,x31 4,x415
1 01 11 21 31
11 01 1.11 1.21 1.31
( ) 0, 8, 0, 3,
( ) 0, 2, 2, 1
f x f f f
g x g g g
12 0
x ,x22 2,x32 4,x42 5
2 02 12 22 32
22 02 2.12 2.22 2.32
( ) 0, 12, 4, 1,
( ) 0, 4, 12, 9
f x f f f
g x g g g
1 11 21 31
2 12 22 32
0 [2 2 1 ]
0 [2 2 1 ]
x x Dari rumus
2 11 21 31 12 22 32
g ( )x (0 4 12 9 ) (0 2 2 1 )3
0 1
( ) ( ) ( ) ( )
j
P
j j j vj vj
j L j L v
f x f x f x f
diperoleh
11 21 31 12 22 32 3
1
( ) (0 8 0 3 ) (0 12 4 1 )
2 f x x
Dari rumus
1 1 0 1, 1
( ) ( ) ( ) ( )
i j j j j vj vj
j L j L
g x g x g x g P
diperoleh
1( ) (0 2 11 2 21 1 31) (0 2 12 2 22 1 32) 3 5
g x x
2 11 21 31 12 22 32
g ( )x (0 4 12 9 ) (0 2 2 1 )3 Jadi, diperoleh pemrograman linear;
Min f(2,3, 0) 22
11 21 31 12 22 32 3
1
( ) (0 8 0 3 ) (0 12 4 1 )
2 f x x
Terhadap
1 11 21 31 12 22 32 3
2 11 21 31 12 22 32
( ) (2 2 1 ) (2 2 1 ) 5
( ) (4 12 9 ) (2 2 1 ) 3
g x x
g x
dengan 0vj 1 untuk v=1,2,3 dan j=1,2,3.
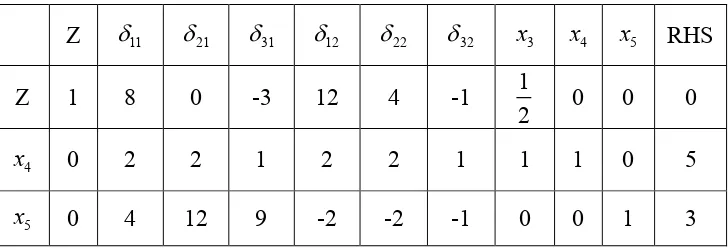
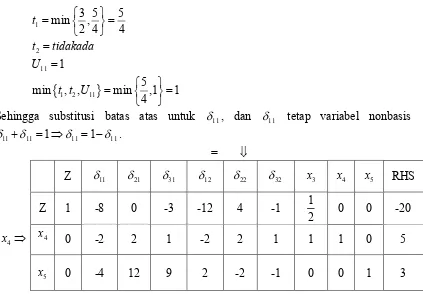
Masalah ini diselesaikan dengan menggunakan metode simpleks untuk variabel terbatas untuk pemilihan variabel tak dasar yang masuk basis, sehingga diperoleh tabel simpleks di bawah ini.
Z 11 21 31 12 22 32 x3 x4 x5 RHS
Z 1 8 0 -3 12 4 -1 1
2 0 0 0
4
x 0 2 2 1 2 2 1 1 1 0 5
5
[image:38.595.128.492.591.716.2]x 0 4 12 9 -2 -2 -1 0 0 1 3
25
1
5 5
min
2 2
t
2 t
12 1
U
1 2 12
5
min , , min , ,1 1
2
t t U
Substitusikan batas atas untuk 12, dan 12 tetap variabel nonbasis
12 12 1 12 1 12
Z 11 21 31 12 22 32 x3 x4 x5 RHS
Z 1 8 0 -3 -12 4 -1 1
2 0 0 -12
4
x 0 2 2 1 -2 2 1 1 1 0 5
5
[image:39.595.111.513.73.408.2]x 0 4 12 9 2 -2 -1 0 0 1 3
Tabel 2. Penyelesaian kedua dari tabel simpleks untuk variabel terbatas
1
3 5 5
min ,
2 4 4
t
2
t tidakada
11 1
U
1 2 11
5
min , , min ,1 1
4 t t U
Sehingga substitusi batas atas untuk 11, dan 11 tetap variabel nonbasis
11 11 1 11 1 11
.
=
Z 11 21 31 12 22 32 x3 x4 x5 RHS
Z 1 -8 0 -3 -12 4 -1 1
2 0 0 -20
4 x
0 -2 2 1 -2 2 1 1 1 0 5
5
x 0 -4 12 9 2 -2 -1 0 0 1 3
4
[image:39.595.113.536.440.734.2]1
1 1
min
2 2
t
2 t
12 1
U
1 2 12
1 1
min , , min , ,1
2 2
t t U
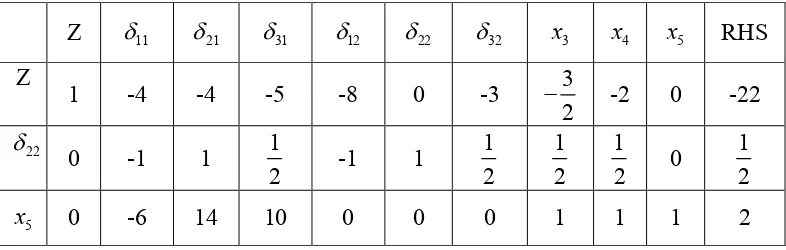
Jadi, 22 masuk ke dalam basis menggantikan x4.
Z 11 21 31 12 22 32 x3 x4 x5 RHS
Z
1 -4 -4 -5 -8 0 -3 3
2
-2 0 -22
22
0 -1 1 1
2 -1 1
1 2 1 2 1 2 0 1 2 5
[image:40.595.144.537.261.386.2]x 0 -6 14 10 0 0 0 1 1 1 2
Tabel 4. Penyelesaian keempat dari tabel simpleks untuk variabel terbatas Sehingga, solusi optimalnya:
11 21 31 12 22 32
11 21 31 12 22 32
0 0 0 0 1 2 0 1
1, 0, 0, 1, , 0
2
Jadi, diperoleh hasil optimal:
1 2 3
( , , )
x x x x dengan :
1 11 21 31
2 12 22 32
3
0 (2 2 1 ) 2 0 (2 2 1 ) 3 0 x x x
27
KESIMPULAN DAN SARAN
4.1. KESIMPULAN
Fungsi nonlinier dapat dihampiri oleh funsi linier putus-bersambung (piecewise linear function). Hampiran suatu fungsi nonlinier dengan fungsi linier piecewise dipengaruhi oleh banyaknya titik kisi. Jika titik kisi bertambah, maka variabel pada masalah hampiran pemrograman linier akan bertambah. Untuk mengatasi hal tersebut, dapat digunakan modifikasi metode hampiran yang menggunakan sedikit titik kisi diawal perhitungan.
Ada dua cara untuk memformulasikan fungsi linear putus-bersambung yaitu dengan formulasi lambda dan formulasi delta. Dalam formulasai lambda, variabel didefinisikan untuk setiap titik kisi. Sedangkan, dalam formulasi delta, variabel didefinisikan untuk setiap interval diantara titik kisi.
Masalah pemrograman separabel P dihampiri dengan mengganti setiap fungsi objektif dan fungsi kendalanya yang nonlinear dengan fungsi linear putus-bersambung (piecewise linear function) yang didefinisikan sebagai masalah AP. Dengan menggantikan fungsi objektif dan fungsi kendalanya yang nonlinier oleh hampiran-hampiran liniernya, maka Masalah AP dapat dituliskan sebagai Masalah LAP
29
4.2. SARAN
DAFTAR PUSTAKA
Nasendi, B.D., ” Program Linear dan Variasinya”, PT Gramedia, Jakarta, 1985.
Hiller, Frederick.S. dan Liberman, Gerald.L., “ Introduction to Operation Research ”, McGraw-Hill.Inc, USA, 1990.
M. Minoux.,” Mathematical Programming Theory and Algorithms ”, Bordas Dunod Gauthier-Villars, Paris, 1983
Bazaraa M.S., H.D. Sherali & C.M. Shetty, “Nonlinear Programming: Theory and
Algorithms”, 2nd
ed . John Wiley, New York, 1993.
Bartle R.G., “The Element of Real Analysis”, 2nded. John Willey, New York, 1976..
S.S. Rao., “Optimization: Theory and Applications”, 2nded. Wiley Eastern Limited, New Delhi, 1984.
Ben-Israel A, Ben-Tal, & S. Zlobec.,”Optimality in Nonlinear Programming: A Feasible Directions Approach”, John Wiley & Sons, New York, 1981.
Gunawan Ellen & Ardi Wirda Mulia,”Pengantar Riset Operasi”, 5th
ed. Gelora Aksara Pratama, Jakarta, 1994.