BAB I
BEBERAPA PENGERTI AN DAN PRI NSI P DASAR
(By I swandi I mran)
1.1 Pengertian Sruktur
Struktur didefinisikan sebagai:
• Kumpulan join – join dalam ruang yang dihubungkan satu sama lain melalui elemen-elemen struktur seperti balok, kolom, dll.
• Suatu bentuk sistem yang berfungsi menahan beban
Contoh :
Analisis struktur adalah suatu bentuk idealisasi struktur dengan menggunakan model analitik. Tujuan analisis struktur adalah untuk mengestimasi besarnya tegangan dan perpindahan untuk keperluan analisis / evaluasi struktur ataupun perencanaan struktur
I dealisasi struktur :
• Elemen-elemen struktur dimodelkan sbg. elemen garis • Model dua dimensi atau tiga dimensi
• Gaya diaplikasikan pada join (titik kumpul)
1.2 Analisis Vs Perencanaan
Prosedur analisis :
Diketahui : geometri, sifat material dan pembebanan
Dicari : gaya-gaya dalam, realsi perletakan, displacement
“ Struktur Bidang”
Dalam perencanaan :
Hasil yang didapat digunakan untuk merencanakan ukuran penampang yang akan digunakan
Dalam Analisis / evaluasi :
Prosedur diatas dilakukan utuk mengecek kecukupan suatu hasil desain
1.3 Hubungan aksi – deformasi
Analisa struktur harus mememuhi prinsip-prinsip dasar mekanika, yaitu:
a. Adanya keseimbangan di semua member dan join pada struktur. Keseimbangan dapat diperoleh :
- dengan menulis langsung persamaan keseimbangan di tiap-tiap join - dengan menggunakan prinsip kerja maya atau energy regangan
b. Adanya kompabilitas deformasi yang terjadi pada struktur. Kompatibilitas deformasi ini dapat dicapai dengan menerapkan beberapa prinsip-prinsip kinematika (akan dibahas secara mendalam dalam bab tersendiri)
c. Adanya hubungan aksi-deformasi yang mengisyaratkan hubungan antara aksi yang diberikan pada struktur dan deformasi yang dihasilkan
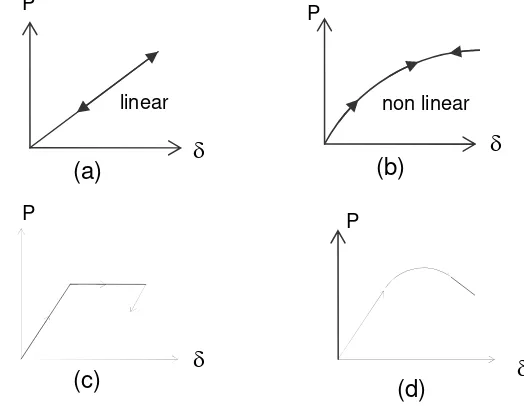
Hubungan satu-satu (unik) antara aksi dan deformasi hanya ada pada struktur yang mempunyai sifat elastik sempurna.
Gambar (a) dan (b) di atas memperlihatkan contoh hubungan aksi – deformasi (P-δ), untuk material yang bersifat elastik sempurna (unik). P pada gambar tersebut adalah aksi (dapat berupa gaya, momen, tegangan) dan δ adalah deformasi (dapat berupa perpanjangan, kurvature, regangan).
P
linear
δ
(a)
P
non linear
(b)
δ
P
δ
(c)
P
[image:2.612.172.434.445.648.2]Gambar (c) dan (d) di atas menunjukkan contoh hubungan aksi – deformasi untuk material yang bersifat inelastic (tidak unik).
1.4 Kekangan ( konstraint)
Struktur dapat stabil karena adanya perletakan, atau secara umum karena adanya kondisi batas yang dikenakan pada struktur.
Ada 2 tipe kondisi batas pada struktur, yaitu:
• Kondisi batas perpindahan = berhubungan dengan pembatasan gerakan pada titik-titik perletakan
• Kondisi batas gaya = berhubungan dengan pembatasan besarnya gaya yang bisa timbul pada titik-titik join
Baik gaya ataupun displacement disetiap join pada struktur harus didefinisikan. Jika gaya didefinisikan pada suatu join, maka si join dikatakan mengalami static constraint. Bila displacement yang didefinisikan, maka si join mengalami kinematic constraint.
1.5 Statis tertentu
Definisi :
− Jika titik2 kumpul pada struktur hanya diberi kondisi batas (kekangan) gaya saja dan
− Jika gaya2 pada struktur dapat ditentukan hanya dengan prinsip keseimbangan gaya saja.
Langkah-langkah analisis :
1. Gunakan statika : hitung reaksi-reaksi perletakan 2. deformasi dapat dihitung dari hubungan aksi deformasi
3. perpindahan pada titik-titik join dapat dihitung dengan prinsip kinematis
1.6 Kinematis tertentu
Definisi :
− Jika hanya perpindahan saja yang didefinisikan pada titik-titik kumpul
Jika r1 dan r2 didefinisikan maka deformasi batang / elemen struktur diatas dapat
ditentukan dengan langkah-langkah analisis :
1. Tentukan deformasi setiap elemen struktur dengan menerapkan prinsip-prinsip kinematis
2. Gaya-gaya batang dapat ditentukan dari hubungan aksi vs def.
3. Dengan penerapan prinsip-prinsip statika, gaya-gaya pada titik-titk kumpul dapat ditentukan
1.7 Statik tak tentu
Jika sejumlah kekangan deformasi dikenakan terhadap joint-joint struktur statis tertentu, maka struktur tersebut akan menjadi statis tak tentu tingkat S. Gaya-gaya yang timbul akibat adanya kekangan kinematis tidak dapat dihitung hanya dengan menggunakan prinsip keseimbangan. Gaya-gaya tersebut adalah gaya redundan
Langkah pemecahan struktur stats tak tentu
1. potong struktur sehingga menjadi statis tertentu dan stabil
2. Hitung gaya-gaya batang sebagai fungsi dari gaya luar dan gaya redundan menggunakan prinsip keseimbangan
3. hitung deformasi batang, sebagai fungsi gaya redundan, dengan menggunakan hubungan aksi-deformasi
4. untuk masing2 gaya redundan, ada pasangan kekangan kinematis yang diketahui. Dengan menggunakan prinsip-prinsip kinematis bisa didapat persamaan-persamaan simultan yang jumlahnya sama dengan jumlah gaya redundan
1.8 Kinematis tak Tentu
Jika kekangan gaya diberika kepada join-join struktur yang sebelumnya kinematis tertentu, maka struktur akan menjadi kinematis tak tentu tingkat K.
Perpindahan-r2
r1
r2
perpindahan yang timbul akibat adanya kekangan gaya tidak dapat dihitung hanya dengan menggunakan prinsip-prinsip kinematis saja. Perpindahan ini disebut perpindahan redundan.
Step pemecahan struktur kinematis tak tentu
a. Gunakan prinsip-prinsip kinematik untuk menghitung deformasi pada setiap batang sebagai fungsi perpindahan yang diketahui dan perpindahan redundan b. Gunakan hubungan aksi-deformasi untuk mendapatkan gaya-gaya yang bekerja
pada batang sebagai fungsi parameter-parameter yang diketahui
c. Untuk masing-masing redundan K, ada pasangan gaya yang diketahui dengan menggunakan prinsip keseimbangan dapatkan persamaan-persamaan simultan yang jumlahnya sama dengan jumlah perpindahan redundan
d. Persamaan tersebut kemudian dipecahkan untuk mendapatkan besarnya perpindahan redundan.
Contoh :
R1
R2
S = 4
K = 2
S = 5
K = 16
S = 1
External
Forces
at
Joints
(
R
)
Internal
Forces
at
Joints
(
S
)
External
Displacements
at
joints
(
r
)
Internal
Deformation
in
Members
(
v
)
Internal Forces at Member Cross Section
( ζ )
Internal Stresses ( Cross Section ) ( σ )
Internal Strains ( Cross Section ) ( ε )
Deformations at the Member Cross Section
( v )
1.9 Kombinasi statik dan kinematik tak tentu
Proses perhitungan struktur yang tak tentu sangat bergantung pada derajat ketaktentuannya
Sruktur rangka batang ini lebih baik dipecahkan sebagai struktur kinematik tak tentu dengan menggunakan metoda perpindahan (Displacement Method)
Struktur ini harus diselesaikan sebagai struktur statik tak tentu dengan menggunakan metoda gaya (Force Method)
Struktur balok ini bisa dibebani dimana saja sepanjang baloknya (jumlah static constrain tidak hingga). Oleh karena itu struktur ini mempunyai jumlah join yang tak hingga (beberapa diantaranya dikenakan gaya yang besarnya nol). Jadi harus diselesaikan dengan metoda gaya.
Step pemecahan struktur kinematik tak tentu
a. Gunakan prinsip-prinsip kinematik untuk menghitung deformasi pada setiap batang sebagai fungsi perpindahan yang diketahui dan perpindahan redundan b. Gunakan hubungan aksi-deformasi untuk mendapatkan gaya2 yang bekerja pada
batang sebagai fungsi dari parameter2 yang tidak diketahui
c. Untuk masing-masing perpindahan redundan K, ada pasangan “static constrain” yang diketahui (yaitu dalam bentuk “force boundary conditiions”) dengan menggunakan prinsip keseimbangan (spt. Keseimbangan titik) dapatkan persamaan2 simultan yang jumlahnya sama dengan jumlah perpindahan redundan
d. Persamaan ini kemudian dipecahkan untuk mendapatkan besarnya perpindahan redundan yang terjadi pada struktur
R1
R2
S = 4
K = 2
S = 5
K = 16
S = 1
1.9a Asumsi- asumsi untuk mengurangi derajat kinematik tak tentu K
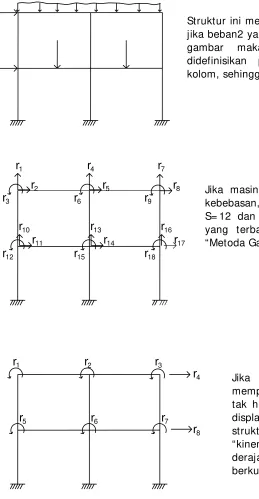
Struktur ini mempunyai S= 12 dan K= 24. Tapi jika beban2 yang bekerja seperti terlihat pada gambar maka titik2 join hanya perlu didefinisikan pada pertemuan balok dan kolom, sehingga K= 18.
Jika masing2 join mempunyai 3 derajat kebebasan, maka struktur ini mempunyai S= 12 dan K = 6x3 = 18. Jadi metoda yang terbaik untuk masalah ini adalah “Metoda Gaya “
Jika elemen2 balok dan kolom mempunyai kekakuan aksial yang tak hingga, maka jumlah “unknown displacement” akan berkurang. Jadi struktur ini dikenakan suatu bentuk “kinematk constraint” sehingga derajat kinematik tak tentunya berkurang.
r
1r
3r
2r
4r
6r
5r
7r
9r
8r
10r
12r
11r
13r
15r
14r
16r
18r
17r
1r
2r
3r
4r
5r
6r
7 [image:8.612.110.369.155.654.2]Untuk kasus di atas, S= 12 dan K= 8, sehingga metoda perpindahan lebih superior.
Jika kekakuan lentur balok sangat tinggi (yaitu EIb > > > EIc) maka K= 2 dan S= 12.
Untuk kasus ini, metoda perpindahan jauh lebih superior dari metoda gaya.
1.9b Asumsi- asumsi untuk mengurangi derajat statik tak tentu S
Derajat statis tak tentu S bisa berkurang jika ada bagian2 struktur yang dianggap sangat flexible terhadap deformasi (kekakuannya = 0). Contoh pada analisis rangka batang. Pada perhitungan struktur rangka batang, biasanya diasumsikan bahwa setiap rangka batang mempunyai kekakuan lentur yang besarnya sama dengan nol. Hal ini berarti bahwa semua join pada struktur rangka batang adalah pin, sehingga jumlah derajat statik tak tentunya berkurang.
1.10 Penutup
Berdasarkan pembahasan di atas, dapat disimpulkan bahwa:
- Kekakuan tinggi : mengurangi derajat kinematik tak tentu - Kekakuan rendah : mengurangi derajat statik tak tentu
Penentuan tepat dari banyaknya join pada modelisasi struktur sangat bergantung pada kondisi pembebanan dan geometri. Biasa nya joint diletakkan pada lokasi-lokasi dimana gaya-gaya luar bekerja. Tapi, walaupun begitu kita bisa menambahkan join2 pada lokasi dimana tidak ada gaya-gaya luar yang bekerja.