RANCANG BANGUN STARTING MOTOR INDUKSI 3 FASA
HUBUNG BINTANG-SEGITIGA DILENGKAPI PENGAMAN 3
FASA BERBASIS RASPBERRY PI
(Skripsi)
OLEH Belwanto Sagala
FAKULTAS TEKNIK
UNIVERSITAS LAMPUNG
ABSTRAK
RANCANG BANGUN STARTING MOTOR INDUKSI TIGA FASA HUBUNG BINTANG-SEGITIGA DILENGKAPI PENGAMAN TIGA
FASA BERBASIS RASPBERRY PI
Oleh
BELWANTO SAGALA
Pada mesin-mesin industri yang berkapasitas diatas 30KW perlu dilakukan pengasutan dengan metode tersendiri, karena saat start arus yang digunakan sangat besar dan dapat mempengaruhi kapasitas sumber daya yang terpasang. Masalah seperti ini diselesaikan dengan merancang pengasutan motor induksi dalam keadaan normal dan gangguan. Dengan metode pengasutan ini diharapkan dapat menghasilkan starting dengan arus nominal motor, dilengkapi dengan pengaman sumber tiga fasa serta dapat merekam kerja motor dalam database.
Dalam pengasutan motor induksi tiga fasa dengan metode bintang-segitiga ditentukan dengan melihat pembacaan arus start pada sensor arus dan ketika motor dijalankan atau motor bekerja, jika terjadi salah satu fasa dari tiga fasa tidak baik hubungannya, maka motor akan diproteksi dengan pengaman sumber 3 fasa. Setelah motor bekerja ada hasil rekaman aktifitas motor untuk melengkapi solusi permasalahan yang terjadi pada mesin dan diperlukan metode yang lebih baik menggunakan rapsberry pi
Dari hasil pengujian starting motor induksi 3 fasa bintang-segitiga, seting arus start
untuk perpindahan sambungan dari bintang ke segitiga sangat menentukan kondisi
starting motor induksi. Pada motor berkapasitas kecil seting arus start sangat sulit ditentukan, sedangkan untuk motor berkapasitas lebih besar nilai rentang arus
startnya sangat lebar, seting arus start dapat lebih mudah ditentukan. Untuk kondisi start secara langsung ke sumber (DOL) diperlukan arus yang sangat besar untuk mendapatkan torsi motor yang besar, walaupun hal ini dapat merusak belitan motor namun motor dapat bekerja pada kondisi nominal dengan cepat. Rangkaian start hubungan bintang-segitiga dapat memperkecil arus start dengan torsi yang lebih kecil walaupun motor akan lama mencapai kondisi nominalnya.
ABSTRACT
DESIGN OF STAR-DELTA CONNECTION STARTING OF
THREE-PHASE INDUCTION MOTOR WITH THREE-PHASE
SAFETY BASED ON RASPBERRY PI
By
BELWANTO SAGALA
In the industrial induction machines with a capacity above 30 KW needs to have starting method of its own, because the current used when starting is very large and can affect resource capacity installed. Problems like this are solved by designing the starting of induction motors under normal circumstances and disturbances. With this starting method is expected to produce starting with the motor nominal current, equipped with three-phase safety as well as the source of motors can work in a database record.
In the starting of three phase induction motor by using star-delta is determined by looking at the reading of the starting current in the current sensor, and when the motor is running, if there is one phase of a three phase is not good, then the motor will be protected with a security from three-phase source. After the motor works then there is recordings of motor activity for complete solutions to problems that occurred in the engine and needed a better method using raspberry pi.
From the test results of starting of three-phase induction motor using star-delta connection, setting the starting current will determine displacement connection from star to delta of the induction motor starting. In the small capacity, motor start current setting is very difficult to determine, whereas for larger capacity motor start current is very wide range, setting the starting current can be more easily determined. For a start condition directly to the source (DOL) very large current is needed to obtain a large motor torque, although it could damage the motor, but the motor windings can work at nominal conditions quickly. Starting using star-delta connection can reduce the starting current with a smaller torque even though the motor reaches its nominal condition in longer time.
RANCANG BANGUN
STARTING
MOTOR INDUKSI TIGA
FASA HUBUNG BINTANG-SEGITIGA DILENGKAPI
PENGAMAN TIGA FASA BERBASIS RASPBERRY PI
Oleh
BELWANTO SAGALA
Skripsi
Sebagai Salah Satu Syarat untuk Mencapai Gelar SARJANA TEKNIK
Pada
Jurusan Teknik Elektro
Fakultas Teknik Universitas Lampung
FAKULTAS TEKNIK
UNIVERSITAS LAMPUNG
Judul Skripsi
Nama Mahasiswa
Nomor Pokok Mahasiswa
Jurusan Fakultas
Osea ?'ebua, S.T., I}l'T. NrP 19700609 199905 1 002
NANCANG BANGT}N STABTII]G FIOTOK INDUI{$I
5
FIT$A IIUBUNG BINflTNG-SEGITIGA DILENGIfAPI PENGAIIAIIT 5FASA BERBASIS RASPBDBRY PI
lr.
NoerSoe(fananto,
I[.T.
NrP 19651114 199905 1001
2. Ketua Jurusan Teknik Elektro
!$Sttanto
Sg0qfn
0745051008 Teknik Elektro Teknik
MEFIIETUJUI
1. Komisi Pembimbing
N
Dr.
Ing.
Ardlan Ulrnan,
S.T.,!I.Sc.
1. Tim Pengufi
Ketua
Sekretaris
: Osea
Zebua, $.T.,
Fl.T.Pengqji
..,
'.',
'',...,,,,,-'Bukan
PemUirnUinE
;1v.654
l|arls,
![.T.
:lr '
t,. .., ,l;,.1i ,fl:tll
SURAT PNRNYATAAN
Dengan ini saya menyatakan bahwa skripsi ini dibuat oleh saya sendiri. Adapun
karya arang lwn yang terdapat dalam skripsi
ini
telah dicantumkan sumbemyapada daftar pustaka.
Apabila saya tidak benar maka saya bersedia dikenai sanksi sesuai dengan hukum
yang berlaku.
Desember 2015
Bandar Lampung,
RIWAYAT HIDUP
Penulis dilahirkan di Candipuro pada tanggal 17
Desember 1988, sebagai anak pertama dari tiga
bersaudara dari Bapak A. Sagala dan Ibu R.Sialagan.
Penulis menyelesaikan pendidikan Sekolah Dasar di SDN
1 Sukabanjar pada tahun 2001, Sekolah Lanjutan Tingkat
Pertama di SLTPN 1 Sidomulyo pada tahun 2004,
Sekolah Menengah Kejuruan di SMKN 2 Kalianda pada
tahun 2007 dan penulis terdaftar sebagai mahasiswa Jurusan Teknik Elektro
Fakultas Teknik Universitas Lampung pada tahun 2007.
Pada bulan Febuari 2012 penulis melaksanakan kerja praktek di PT. PLN (persero)
P3B sumatera UPT. tanjung karang tragi tegineneng GI 150 KV tegineneng,
laporan yang dibuat tentang “Pemeliharaan Pemutus Tenaga (PMT) Media
MOTTO
“
Tindakan yang membawa seseorang keluar dari kondisi yang
buruk, orang lain hanya sarana untuk kita bangkit dan
Persembahan
Sebuah karya sederhan ini kupersembahkan kepada:
Kedua orang tuaku, maaf dan terimakasih, terimakasih atas dukunagan dan doa yang
tak henti-hentinya dengan karya sederhana ini menjadi awal harapan untuk
membahagiakan kalian. Maaf buat semua tindakan yang tidak mendengarkan
nasihat-nasihat kalian..
Adik-adik aku, Yulian Sagala dan Magdalena Sagala terimakasih atas dukungan
semangat dan do’a yang kaiian berikan
.
Terimakasih buat Ririsma Libra Jayanti Sinurat atas omelan dan do,a agar aku tetap
semangat!!!
Sahabat dan teman-teman seperjuangan, Ady Kurniawan, Remy Martin, David
Rolando, Youki Permadi, Septian Riwanto, Danial Rasta Ginting, Aditiya Agung
Kurniawan, Raditiya Prihandanu dan teman yag lain yang tidak bisa disebutkan satu
persatu yang banyak membatu dalam menyelesaikan karyaku ini.
SANWACANA
Puji dan syukur penulis akan kehadirat Allah atas segala berkat yang senantiasa
ada , sehingga penulis dapat menyelesaikan tugas akhir ini dengan baik.
Skripsi dengan judul “Rancang Bangun Starting Motor Induksi 3 Fasa Hubung
Bintang-Segitiga Dilengkapi Pengaman 3 Fasa Berbasis Raspberry Pi” merupakan
salah satu syarat untuk memperoleh gelar Sarjana Teknik pada jurusan Teknik
Elektro, Fakultas Teknik, Universitas Lampung. Dalam penyelesaian skripsi ini
tidak lepas dari dukungan dan bantuan dari banyak pihak. Dalam kesempatan ini
penulis ucapkan terima kasih kepada:
1. Bapak Prof. Dr. Ir. Hasriadi Mat Akin, M.P. selaku Rektor Universitas
Lampung.
2. Bapak Prof. Dr. Suharno, M.Sc. selaku Dekan Fakultas Teknik.
3. Bapak Agus Trisanto, Ph.D. selaku Ketua Jurusan Teknik Elektro Universitas
Lampung.
4. Bapak Osea Zebua, S.T.,M.T. selaku dosen pembimbing utama atas
6. Bapak Ir. Abd Haris , M.T. selaku dosen penguji utama atas kritik dan
saran-saran dalam penyelesaian skripsi ini.
7. Saudara Adi Kurniawan dalam membantu menyelesaikan skripsi ini.
8. Seluruh dosen beserta staf administrasi jurusan Teknik Elektro Universitas
Lampung.
9. Seluruh teman-teman sesama mahasiswa jurusan teknik elektro yang telah
banyak membantu dalam pembuatan alat, pengujian alat dan sebagainya.
10. Seluruh teman-teman yang tidak saya sebutkan satu persatu, terimakasih atas dukungan, bantuan dan do’a kalian semua.
Penulis menyadari bahwa masih banyak kekurangan dalam skripsi ini, oleh karena
itu kritik dan saran yang membangun dari semua pihak sangat diharapkan.
Semoga skripsi ini dapat memberikan manfaat bagi kita semua.
Bandar Lampung, Desember 2015
Penulis,
DAFTAR ISI
Halaman
ABSTRAK ... i
DAFTAR ISI ... xii
DAFTAR TABEL ... xiv
DAFTAR GAMBAR ... xv
I. PENDAHULUAN A. Latar Belakang ... 1
B. Tujuan Penelitian ... 2
C. Manfaat Penelitian ... 3
D. Rumusan Masalah ... 3
E. Batasan Masalah ... 3
F. Hipotesis ... 4
G. Sistematika penulisan ... 4
II. TINJAUAN PUSTAKA A. Motor Induksi Tiga Fasa ... 6
B. Starting (Pengasutan) Hubungan Bintang (Y)-Segitiga (∆) Pada Motor Induksi 3 Fasa ... 18
C. Kontaktor Magnit ... 20
D. ADC (Analog to Digital Converter) ... 22
E. Single Board Computer BCM2835 (Raspberry Pi) ... 23
F. Transformator Satu Fasa ... 24
G. Relay ... 26
H. Pengukuran Arus AC ... 28
J. Proteksi Motor Induksi 3 Fasa ... 32
III. METODE PENELITIAN A. Waktu dan Tempat ... 35
B. Alat dan Bahan ... 35
C. Prosedur Kerja... 36
D. Studi Literatur ... 38
E. Spesifikasi Rancangan... 38
F. Perancangan Perangkat Keras ... 39
G. Perancangan Perangkat Lunak ... 44
H. Kalibrasi ... 44
I. Pengujian ... 46
IV. HASIL DAN PEMBAHASAN A. Perangkat Keras... 49
B. Pengujian ... 52
C. Pembahasan ... 76
V. KESIMPULAN DAN SARAN A. Kesimpulan ... 79
B. Saran ... 80
DAFTAR PUSTAKA
DAFTAR TABEL
Halaman
1. Tabel 4.1. Arus Starting Motor Induksi 3 Fasa Bintang-segitiga
Berbeban ... 52 2. Tabel 4.2. Kecepatan Starting Motor Induksi 3 Fasa Bintang-segitiga
Berbeban ... 56 3. Tabel 4.3. Arus Starting Motor Induksi 3 Fasa DOL Berbeban ... 58 4. Tabel 4.4 Kecepatan Starting Motor Induksi 3 Fasa DOL
Berbeban ... 62 5. abel 4.5. Arus Starting Motor Induksi 3 Fasa Bintang-segitiga Tanpa
Beban ... 64 6. Tabel 4.6. Kecepatan Starting Motor Induksi 3 Fasa Bintang-segitiga
Tanpa Beban ... 68 7. Tabel 4.7. Arus Starting Motor Induksi 3 Fasa DOL Tanpa
Beban ... 70 8. Tabel 4.8. Kecepatan Starting Motor Induksi 3 Fasa DOL Tanpa
DAFTAR GAMBAR
Halaman
1. Gambar 2. 1. Motor induksi 3 fasa ... 6
2. Gambar 2. 2. Motor Tipe Rotor Sangkar Tupai (squirrel-cage rotor) ... 7
3 Gambar 2. 3. Motor Tipe Rotor Belitan (wound rotor) ... 8
4. Gambar 2. 4. Prinsip Kerja Motor Induksi 3 Fasa ... 10
5. Gambar 2. 5. Rangkaian ekivalen motor induksi ... 11
6. Gambar 2. 6. Rangkaian ekivalen per fasa mengilustrasikan konversi daya ... 13
7. Gambar 2. 7. Diagram aliran daya rata-rata motor induksi tiga fasa ... 13
8. Gambar 2. 8. Rangkaian ekivalen Thevenin per fasa untuk motor induksi ... 14
9. Gambar 2. 9. Rangkaian ekivalen per fasa motor induksi ... 16
10. Gambar 2. 10. Diagram Starting Bintang-Segitiga Motor. ... 19
11. Gambar 3. 11. Karakteristik Starting Motor Y/∆ ... 20
12. Gambar 2. 12. Simbol Kontaktor Magnit ... 20
13. Gambar 2. 13. Belahan Kontaktor Magnit ... 21
14. Gambar 2. 14. Fisik Kontaktor Magnit ... 21
15. Gambar 2. 15. ADC MCP3008 ... 22
16. Gambar 2. 16. GPIO Raspberry Pi ... 24
17. Gambar 2. 17. Jenis Relay DC ... 27
18. Gambar 2. 18. Jenis Relay Menurut Jumlah Terminal Kontak ... 28
19. Gambar 2. 19. Sensor Arus ACS712 ... 28
20. Gambar 2. 20. Prinsip dari Hall Effect ... 30
21. Gambar 3. 1. Diagram alir pengerjaan tugas akhir ... 37
22. Gambar 3. 2. Diagram Blok Perancangan Sistem ... 38
23. Gambar 3. 3. Push Button ... 40
24. Gambar 3. 4. Relay ... 41
25. Gambar 3. 5. Rangkain Sensor Tegangan ... 41
26. Gambar 3. 6. Sensor Arus ... 42
27. Gambar 3. 7. Rangkaian Hubungan Sensor, Push Button dan Relay dengan Rapsberry Pi ... 43
29. Gambar 3. 8. Digital Power Clamp Meter (Tersedia di Lab. Teknik Pengukuran J.TE. Unila) ... 46
Konversi Energi Elektrik J.T.E. Unila) ... 48 32. Gambar 4. 1. Rangkaian Pengkondis Sinyal ... 49 33. Gambar 4. 2. Hardware Sistem Starting Motor Induksi Tiga
Fasa ... 50 34. Gambar 4. 3.Keseluruhan dari Starting Motor Induksi Tiga Fasa 51 35. Gambar 4. 4. Grafik Arus Starting Motor Induksi 3 Fasa
Star-delta Berbeban ... 56 36. Gambar 4. 5. Grafik Kecepatan Starting Motor Induksi 3 Fasa
Star-delta Berbeban ... 57 37 Gambar 4. 6. Grafik Arus Starting Motor Induksi 3 Fasa DOL
Berbeban ... 61 38. Gambar 4. 7. Grafik Kecepatan Starting Motor Induksi 3
Fasa DOL Berbeban ... 63 39. Gambar 4. 8. Grafik Arus Starting Motor Induksi 3 Fasa
Star-delta Tanpa Beban ... 68 41. Gambar 4. 9. Grafik Kecepatan Pengujian Starting Motor
Induksi 3 Fasa Star-Delta Tanpa Beban ... 70 42. Gambar 4. 10. Grafik Arus Starting Motor Induksi 3 Fasa
DOL Tanpa Beban ... 74 43. Gambar 4. 11. Grafik Kecepatan Starting Motor Induksi 3 Fasa
BAB I
PENDAHULUAN
A. Latar Belakang
Pada perindustrian saat ini dalam memproduksi tidak lepas dari penggerak utama
yaitu menggunakan mesin-mesin listrik yang berdaya besar sebagai contoh motor
induksi 3 fasa. Motor induksi merupakan jenis motor banyak dipilih dalam
penggunaan alat produksi karena banyak keuntungan diantaranya harga lebih
murah, kontruksi sederhana dan mudah dalam perawatan. Saat start motor induksi 3 fasa mengalami lonjakan arus nominal 5 sampai 7 kali arus normal, hal ini dapat
mengganggu sistem instalasi lain yang bekerja. Walaupun kejadian ini dalam waktu
singkat namun sangat fatal jika pembatas daya PLN tidak sesuai arus lonjakan, akan
berkerja memutuskan aliran daya kebeban. Maka perlu dilakukan pengasutan
diantaranya mengunakan sistem pengawatan bintang-segitaga. Pengaruh lonjakan
arus tidak berpengaruh besar pada motor 3 fasa dengan kapasitas yang kecil sampai
dengan 5KW, sedangkan untuk motor daya yang besar diatas 30KW sampai dengan
Sumber tegangan yang digunakan untuk menyuplai mesin industri ada 3 penghantar
seperti fasa R, S, dan T. Pada saat mesin produksi bekerja dan salah satu fasa atau
lebih tidak terhubung, maka akan timbul adanya ketidak seimbangan antara fasa
menyebabkan panas yang berlebihan dan merusak mesin itu sendiri. Pada saat
ganguan tersebut pengaman 3 fasa memutuskan aliran daya ke motor atau secara
langsung memberhentikan kerja dari motor induksi 3 fasa. Dengan metode
sebelumnya telah membahas mengenai starting motor induksi 3 fasa dan menjawab semua masalah, akan tetapi dengan penelitian ini menambahkan fitur selain
menentukan starting motor hubung bintang (Y)-segitiga (∆), proteksi pengkopelan 3 fasa dengan adanya pengaman 3 fasa maka supply ke mesin dapat diproteksi dari hubungan antara fasa yang baik, serta adanya rekaman aktifitas mesin selama
bekerja.
Oleh karena itu untuk melengkapi solusi permasalahan yang terjadi pada mesin
produksi saat ini diperlukan metode yang lebih baik menggunakan rapsberry pi.
B. Tujuan Penelitian
Adapun tujuan penelitian yang hendak dicapai pada tugas akhir ini adalah sebagai
berikut:
1. Merancang bangun starting motor induksi 3 fasa dengan menggunakan hubung bintang(Y) - segitiga(∆) dilengkapi pengaman 3 fasa berbasis
rapsberry pi .
2. Membuat pengasutan arus pada motor 3 fasa dalam keadaan normal dan
C. Manfaat Penelitian
Adapun manfaat yang hendak dicapai dalam penelitian ini adalah sebagai berikut:
1. Memberikan saran kepada prindustrian, dalam merencanakan mesin-mesin
listrik yang akan digunakan.
2. Sebagai Referensi kepada penelitian yang membahas tentang starting motor 3 fasa.
3. Mendapatkan starting motor 3 fasa dengan arus nominalnya, diproteksi pengaman hubung 3 fasa dan rekaman aktifitas motor induksi.
D. Rumusan Masalah
1. Membuat rangkain sensor arus dan sensor tegangan dengan pengkondisian
sinyal besaran analog kebesaran digital.
2. Membuat program perhitungan arus dan tegangan yang diketahui melalui
sensor yang terpasang.
3. Membuat database untuk merekam hasil kerja mesin produksi.
E. Batasan Masalah
Agar permasalahan tugas akhir ini tidak melebar, ada beberapa batasan masalah
diantaranya:
1. Menggunakan metode pengasutan arus dengan metode hubung bintang(Y)-
segitiga(∆).
3. Sistem peralihan starting hubungan bintang (Y)-segitiga (∆) menggunakan
rapsberry pi.
F. Hipotesis
Dengan menggunakan metode starting motor induksi 3 fasa hubung bintang (Y)-segita(∆) dan rapberry pi beserta rangkain kontrol, sensor arus dan sensor tegangan diharapkan menghasilkan starting berdasarkan arus nominal, proteksi hubungan sumber 3 fasa dan rekaman data mesin bekerja melalui database membantu enginer
dalam pemeliharaan mesin produksi.
G. Sistematika Penulisan
Penulisan tugas akhir ini dijelaskan setiap bab diuraikan sebagai berikut:
BAB I. PENDAHULUAN
Menjelaskan tugas akhir secara umum, berisi latar belakang, tujuan, manfaat
penelitian, batasan masalah, perumusan masalah, dan sistematika penulisan.
BAB II. TEORI DASAR
Pada bab ini dijelaskan mengenai teori dasar yang berhubungan dengan alat yang
BAB III. METODE PENELITIAN
Menjelaskan langkah-langkah yang dilakukan pada penelitian, diantaranya waktu
dan tempat penelitian, alat dan bahan, komponen serta perangkat penelitian,
prosedur kerja, perancangan, dan pengujian alat.
BAB IV. HASIL PENGUJIAN DAN PEMBAHASAN
Bagian ini berisi mengenai hasil pengujian dari percobaan dan membahas terhadap
data-data hasil pengujian yang diperoleh.
BAB V. KESIMPULAN DAN SARAN
Bab ini akan menyimpulkan semua kegiatan dan hasil-hasil yang diperoleh selama
proses pembuatan dan pengujian alat, serta saran yang membangun dari penelitian
BAB II
TINJAUAN PUSTAKA
A. Motor Induksi Tiga Fasa [1]
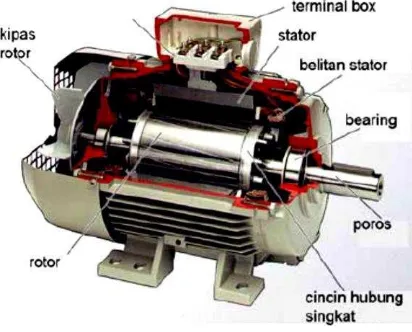
Motor induksi 3 fasa adalah mesin yang merubah energi listrik 3 fasa menjadi energi mekanik. Motor induksi sering disebut motor asinkron atau motor tidak serempak.
Gambar 2. 1. Motor Induksi 3 Fasa
1. Kontruksi Motor Induksi Tiga Fasa [2]
sedangkan pada rotor mendapat arus secara tidak langsung melalui arus induksi stator, hal seperti ini sama pada transformator. Maka dari itu bagian stator dianggap kumparan primer dan rotor dianggap kumparan sekunder.
Stator motor induksi 3 fasa adalah bagian yang diam mengalirkan arus 3 fasa. Stator terdiri atas barisan laminasi inti yang memiliki alur yang menjadi tempat kumparan dililitkan terpisah sebesar 120 derajat listrik yang berbentuk silindris.Sedangkan rotor terdiri dari 2 jenis diantaranya rotor sangkar tupai (squirrel cage rotor) dan rotor belitan (wound rotor).
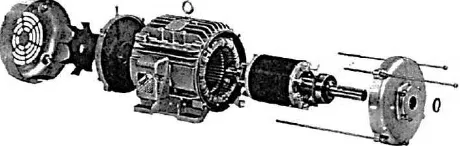
- Rotor sangkar tupai (squirrel-cage rotor)
Rotor sangkar tupai terdiri dari lapisan-lapisan konduktor yang tersusun sejajar dengan poros dan melingkari permukaan inti besi. Konduktor rotor jenis ini tidak terisolasi dari inti, ini mengakibatkan arus rotor secara induksi akan mengalir melalui tahanan yang paling kecil, yaitu konduktor rotor. Pada setiap ujung rotor, semua konduktor rotor dihubung singkat dengan cincin ujung (shorting rings).
Gambar 2. 2. Motor Tipe Rotor Sangkar Tupai (squirrel-cage rotor)
- Rotor belitan (wound rotor)
dengan slip-ring yang berada pada poros rotor. kemudian dihubungkan dengan sikat yang diam (stationary brushes), dengan demikian maka motor bisa diberi resistor dari luar sehinga kecepatan motor dapat diatur dengan mengubah-ubah nilai tahanan resistor luar.
Gambar 2. 3. Motor Tipe Rotor Belitan (wound rotor)
2. Prinsip Kerja Motor Induksi [1]
Motor induksi pada bagian rotor mendapat arus tidak langsung dari sumber listrik akan tetapi didapat dari arus induksi yang dihasilkan dari bagian stator. Kondisi seperti ini sama dengan motor DC, dimana konduktor rotor yang mengalirkan arus medan magnetik maka timbul adanya gaya menggerakkan ke arah medan yang tegak lurus. Pada saat bagian stator dialiri arus, sehingga menghasilkan medan magnet putar dengan kecepatan tertentu dapat dihitung menggunakan persamaan:
p f
Ns 120 (2-1)
Dari hasil medan magnet putar tersebut memotong batang-batang konduktor pada rotor. Akibatnya, pada bagian stator menghasilkan tegangan induksi (ggl) sebesar:
2 2 2 4,44 f N
dimana � adalah tegangan induksi saat rotor berputar, karena pada saat bagian rotor menghasilkan tegangan induksi dan rotor tersebut merupakan rangakaian tertutup, sehingga pada bagian rotor timbul arus (I). Adanya arus (I) didalam medan magnet, akan menimbulkan gaya (F) pada rotor. Bila kopel mula yang dihasilkan oleh gaya (F) pada rotor cukup besar untuk memikul kopel beban, maka rotor akan berputar searah dengan medan putar stator. Agar tegangan terinduksi dibutuhkan adanya perbedaan antara kecepatan medan putar stator ( ) dengan kecepatan berputarnya rotor ( ). Perbedaan kecepatan antara dan disebut slip (s) dinyatakan dengan persamaan berikut:
% 100 s r s n n n s (2-3)
Apabila nr ns, maka tidak adanya timbul tegangan yang terinduksi dan arus tidak mengalir pada kumparan jangkar rotor, dengan demikian tidak dihasilkan kopel. Kopel motor akan ditimbulkan apabila lebih kecil dari . Setiap perubahan kecepatan motor induksi ( ) mengakibatkan perubahanya harga slip dari 100% pada saat start sampai 0% sedangkan pada saat diam (nr ns). Hubungan dari frekuensi dengan slip dapat dilihat pada persamaan (2-1). Pada rotor berlaku hubungan:
120 2 r s n n pf (2-4)
dimana adalah frekuensi arus rotor.
s r s s n n n n pf
120
Sedangkan untuk frekuensi arus rotor adalah:
120
1
s
n p
f (2-6)
Maka:
s f
f2 1 (2-7)
pada saat start slip bernilai 100% f2 f1. [4]
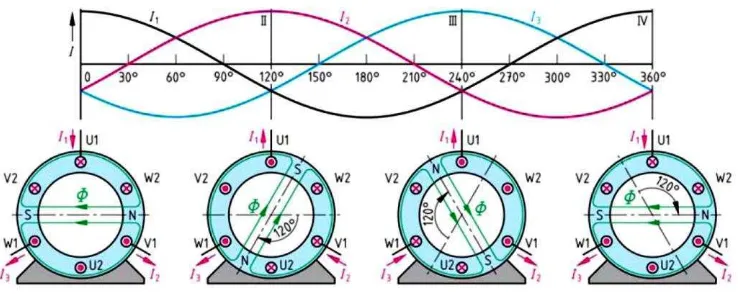
Gambar 2. 4. Prinsip Kerja Motor Induksi 3 fasa
- Saat sudut . Arus I bernilai positip dan arus I dan arus I bernilai negatif dalam hal ini belitan V , U dan W bertanda silang (arus meninggalkan pembaca), sedangkan belitan V , U dan W bertanda titik (arus listrik menuju pembaca). terbentuk fluk magnet pada garis horizontal sudut .
pembaca), sedangkan kawat W , V dan U bertanda titik (arus menuju pembaca). Garis fluk magnit kutub S dan N bergeser 12 dari posisi awal.
- Saat sudut 24 Arus I bernilai positip dan I dan I bernilai negatip, belitan U , W dan V bertanda silang (arus meninggalkan pembaca), dan kawat U , W dan V bertanda titik (arus menuju pembaca). Garis fluk magnit kutub S dan N bergeser sebesar 12 dari posisi kedua.
- Saat sudut 36 . posisi ini sama dengan saat sudut . dimana kutub S dan N kembali
keposisi awal.
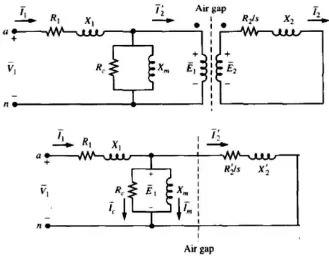
-3. Rangkaian Ekivalen Motor Induksi [3]
Motor induksi dapat dianalogikan sebagai transformator dengan sisi sekunder
yang bergerak. Rangkaian ekivalen per fasa dari motor induksi ditunjukkan pada
gambar 2.5 di bawah ini.
dimana:
1
R dan X1= resistansi stator dan reaktansi stator
s
R2' dan X2'= resistansi rotor dan reaktansi rotor ditinjau dari stator
1
V = tegangan sumber
c
R = rugi-rugi inti
m
X = reaktansi magnetisasi
1
I dan I2' = arus stator dan arus rotor ditinjau dari stator
c
I dan Im = arus pada inti dan arus magnetisasi
dan
s R a s
R 2 2 '
2 (2-8)
2 2 '
2 a X
X (2-9)
2 2 ' 2 a I
I (2-10)
dimana a adalah perbandingan belitan stator, N1 dan rotor, N2, atau:
r s
N N
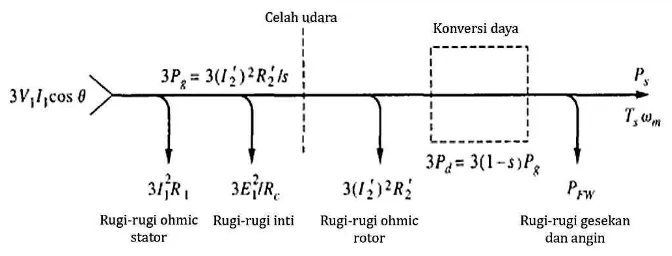
Daya rata-rata per fasa yang melewati celah udara (air gap) adalah:
' 2 2'
2' 2 2'
2' 2 1 2'2 R
s s I
R I s R I
Pg (2-12)
dimana bagian pertama dari persamaan 2-8 merupakan rugi-rugi tembaga
(rugi-rugi ohm), Prcu, dan bagian kedua merupakan torsi yang dibangkitkan untuk memutar rotor, Pd, dan masing dinyatakan dengan persamaan:
I2' 2R2'Prcu (2-13)
2' 2 1 R2's s I
Pd (2-14)
Gambar 2.6 di bawah ini menunjukkan rugi-rugi gesekan dan angin per fasa,
3 / FW
[image:30.595.126.489.455.555.2]P dan daya keluaran pada poros (shaft) per fasa, Ps 3.
[image:30.595.146.482.604.732.2]Gambar 2. 6. Rangkaian ekivalen per fasa mengilustrasikan konversi daya
Torsi yang dibangkitkan dapat dirumuskan dengan persamaan:
s R I s P T m m d d ' '1 2 2
2 (2-15) Karena, s r s s r s n n n s (2-16)
dimana
r
m adalah kecepatan sudut rotor, maka:m s s 1 1 (2-17) Sehingga,
s d s R I T ' ' 2 2 2 (2-18)
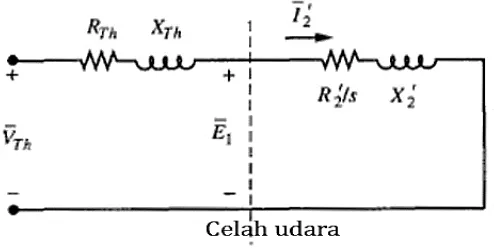
Untuk mencari torsi yang lebih spesifik, rangkaian ekivalen Thevenin dari motor
[image:31.595.187.434.553.677.2]induksi dibuat seperti gambar 2.8.
Dengan pembagian tegangan, tegangan Thevenin dari rangkaian ekivalen adalah:
11 1 1 1 1 1 1 || || V X R X R X R j X X R R X jR V jX R jX R jX R V m c c m m c m c m c m c
TH (2-19)
dan impedansi Thevenin adalah:
21 1 2 1 1 1 1 1 1 1 1 2 1 1 2 1 1 1 1 1 1 1 1 1 1 || || X R X R X R X X R R X X R R X R R X R X R X R X X R j X R X R X R X X R R X X R R X X R X R X R X R X R R jX R jX R jX R Z c m m c m c m c m c c m m c m c c m m c m c m c m c c m m c m c m c TH TH TH (2-20)
Persamaan-persamaan menunjukkan hubungan yang tidak tergantung kecepatan
slip dan kecepatan. Arus rotor kemudian dapat ditentukan dengan persamaan:
22 2 2 2 2 ' ' ' X X s R R V I TH TH TH (2-21)
Sehingga torsi yang dibangkitkan menjadi:
2 2 2 2 2 ' ' X X s R R V T TH TH s TH d (2-22)dan torsi total yang dibangkitkan adalah:
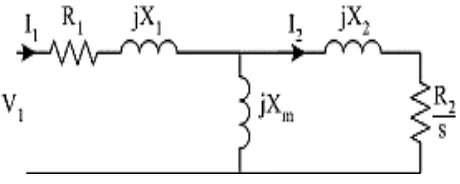
2 2 2 2 2 ' ' 3 3 X X s R R V T TH TH s TH d (2-23)Bila a1 dan resistansi inti Rcdiabaikan, maka
s R s R2' 2
dan rangkaian ekivalen per fasa dari motor induksi ditunjukkan pada gambar 2.9.
Gambar 2. 9. Rangkaian ekivalen per fasa motor induksi
Arus yang mengalir pada rotor:
12 2 2 I X X j s R jX I m m
(2-24)
Tegangan rangkaian ekivalen VTH:
11 1 V X X j R jX V m m
TH
dan impedansi rangkaian ekivalen Thevenin:
TH THm m
TH R jX
jX jX R jX R jX
Z
1 1 1 1 (2-25)
Slip maksimum (pull-outslip) terjadi bila:
2
2 R j X X
s R
TH
TH
(2-26)
2
122 2 2 2 2 max X X R R X X j R R s TH TH TH
TH
dan torsi maksimum (pull-out torque) adalah:
sTH TH TH s R X X s R R V T 1 3 2 2 2 2 2 2 max (2-28) atau,
2 12
2 2 2 max 2 3 X X R R V T TH TH TH s TH (2-29)
Torsi start dapat diperoleh pada saat s1, yakni:
TH
TH
sTH start R X X R R V T 2 2 2 2 2 2 3 (2-30)
4. Klasifikasi Motor Induksi [5]
Motor induksi bisa kita klasifikasi menjadi dua diantaranya:
- Motor induksi satu fasa, motor yang sering kita jumpai pada kehidupan
sehari-hari seperti kipas angin, mesin cuci, dan pengering pakaian. Motor induksi satu
fasa terdiri dari satu belitan stator, bekerja dengan pasokan daya satu fasa dan
memiliki rotor sangkar tupai.
- Motor induksi tiga fasa, merupakan motor yang digunakan pada mesin
produksi dengan daya yang besar. Motor induksi tiga fasa memiliki belitan
stator dengan jenis rotor sangkar tupai dan rotor belitan, walaupun 90% pada
umumnya yang digunakan pada mesin produksi adalah motor jenis rotor
sebagai contoh: pompa, kompresor, belt conveyor, dan gerinder dengan daya 1/3 sampai ratusan horse power.
-B. Starting (Pengasutan) Hubungan Bintang (Y)-Segitiga (∆) Pada Motor
Induksi 3 Fasa
Motor induksi 3 fasa yang digunakan pada mesin produksi di pabrik memiliki
masalah utama dalam starting, karena jika dihidupkan secara langsung akan mengalami drop tegangan sebesar lima sampai tujuh arus nominal. Kapasitas motor yang kecil sampai 5 KW, pengaruh tidak besar pada drop tegangan. Motor 30KW sampai 100 KW berpengaruh pada drop tegangan yang besar dan membuat sistem kelistrikan menurun bahkan merusak peralatan listrik yang lain. Untuk
memperkecil drop dilakukan pengasutan motor induksi. Pengasutan motor induksi adalah cara menjalankan pertama kali motor, tujuannya agar arus starting kecil dan drop tegangan masih dalam batas toleransi. Ada beberapa cara teknik pengasutan, diantaranya : hubungan langsung (Direct On Line = DOL), tahanan depan stator (Primary Resistor), Transformator, bintang-segitiga (Star-Delta), Pengasutan Soft starting, dan tahanan rotor lilit. Akan tetapi disini penulis hanya membahas pengasutan bintang (Y) - segitiga (∆). [1]
Jenis pengasutan yang sering digunakan bintang (Y) - segitiga (∆). Hubungan
bintang digunakan untuk menurunkan tegangan yang masuk ke kumparan stator,
Hubungan bintang-segitiga dapat dibuat dengan gambar dibawah ini:
Gambar 2. 10. Diagram Starting Bintang-Segitiga Motor Induksi. [4]
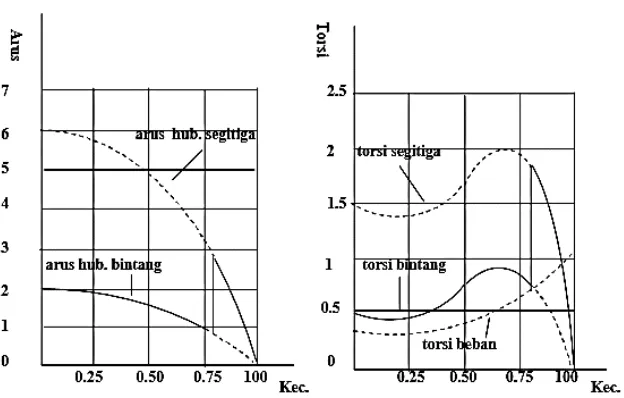
Keterangan : ��= Arus hubung singkat
� = Arus starting
Gambar a. Karakteristik Arus-Kecepatan Gambar b. Karakteristik Torsi-Kecepatan
StartingY/∆ StartingY/∆ a
Gambar 2. 11. Karakteristik Starting Motor Y/∆[9]
C. Kontaktor Magnit [5]
Kontaktor magnit adalah saklar bersifat magnit, saklar ini bekerja adanya medan
magnet yang ditimbulkan oleh sumber pasokan yang terhubung mengaliri arus
dan inti menjadi magnit yang menarik kontak pada kontak normaly open (NO) sedangkan kotak normaly close (NC) akan membuka, sehingga perlu dilakukan perencanaan dalam menggunakan kontaktor magnit untuk mengkonfigurasi input
[image:37.595.232.393.608.697.2]yang masing-masing dapat kita lihat pada gambar berikut ini:
Dapat kita lihat prinsip dari kerja dari kontaktor magnit pada gambar 2.6
menunjukan kontak utama 1, 3, 5, sebagai terminal tiga fasa dan 2, 4, 6, kontak
yang mengaliri sumber daya ketika kontak normaly open bekerja. kumparan inti sebagai manet yang menarik kontak-kontak mangnit , saat arus menglir A dan A
[image:38.595.197.429.246.472.2]dan kontak normaly open akan mengliri arus listrik ke beban saat itu juga normaly close membuka.
Gambar 2. 13. Belahan Kontaktor Magnit
[image:38.595.233.391.538.725.2]D. ADC (Analog to Digital Converter) [13]
Analog to Digital Converter (ADC) merupakan sebuah piranti elektronik yang dapat mengubah besaran dari bentuk analog menjadi bentuk digital. ADC sangat
diperlukan dalam proses pembacaan sensor, sebagai contoh sensor cahaya, sensor
suhu dan lain-lain. Pada umumnya sensor, hasil pengukuran masih berupa besaran
analog, sehingga agar dapat dibaca komputer besaran tersebut harus diubah
menjadi bentuk digital dengan bantuan sebuah ADC. Banyak jenis ADC yang
digunakan, salah satunya adalah ADC MCP3008. ADC jenis ini memiliki resolusi
10bit, resolusi ini mempengaruhi hasil pengukuran, semakin besar nilai resolusi
sebuah ADC maka tingkat akurasinya semakin tinggi. Sedangkan untuk sistem
komunikasi data, MCP3008 menggunakan SPI serial interface yang dapat
dihubungkan secara langsung GPIO Rasspberry Pi.
Untuk menentukan nilai tegangan input digunakan persamaan berikut :
Vin = ( Data digital x 3,3 ) / 1023 (2-37)
Dimana :
Vin = Nilai tegangan yang diukur (Volt)
Data digital = Nilai digital hasil konversi ADC
3,3 = Tegangan referensi MCP3008 (3,3 V)
1023 = Nilai resolusi 10 bit MCP3008
E. Single Board Computer BCM2835 (Raspberry Pi)[8]
Single Board Computer BCM2835 atau biasa diberi nama Raspberry Pi adalah komputer berukuran kartu kredit yang dikembangkan oleh Raspberry Pi
Foundation, yang mempunyai fungsi yang hampir sama dengan PC kebanyakan.
Jenis PC ini dibagi menjadi dua tipe, yaitu tipe A dan tipe B. Perbedaan dari
keduanya hanya terletak pada memory, jumlah port USB, dan network adaptor.
Dalam Penggunaan Raspberry Pi, kita membutuhkan beberapa peralatan seperti
dibawah ini :
Keyboard
Mouse
Kabel power untuk Raspberry Pi
Kabel HDMI untuk monitor atau RCA
SDHC card untuk penyimpanan sistem operasi Raspberry Pi (minimal 4 GB)
[image:41.595.216.428.203.367.2] Kabel UTP untuk menghubungkan LAN
Gambar 2. 16. GPIO Raspberry Pi
Raspberry Pi dilengkapi dengan General Purpose Input/Output (GPIO), setiap pin dari GPIO ini dapat diatur sebagai masukan atau keluaran. Melalui GPIO,
Raspberry Pi dapat sebagai penerima berbagai macam masukan untuk dilakukan
pemrograman, masukan dapat berupa berbagai macam sensor seperti sensor suhu,
sensor cahaya, sensor tegangan dan banyak lagi lainnya .
F.Transformator Satu Fasa
dari satu rangkaian ke rangkain lainnya yang lebih besar atau kecil pada frekuensi
yang sama, saat dimana gandengan magnet berdasarkan induksi elektromagnetik.
Kontruksi transformator ada dua diantaranya inti besi yang terbuat dari besi
berlapis dan dua kumparan, yaitu kumparan primer dan kumparan sekunder.
Untuk perubahan tegangan dan arus ditentukan dari jumlah belitan pada kedua
kumparan tersebut. [7]
Transformasi berasal dari kata transformation yang diartikan perubahan dan sering disebut trafo. Trafo satu fasa tidak berbeda dengan trafo tiga fasa hanya
berbeda aplikasinya pada kapasitas kecil seperti contohnya rangkaian elektronik.
Berikut persamaan untuk trafo satu fasa. [5]
� �
=
� �
=
�
� (2-38)
Dimana:
� = Tegangan pada sisi primer (V)
� = Tegangan pada sisi sekunder (V)
� = Jumlah kumparan pada sisi Primer (Lilit)
� = Jumlah lilitan sisi sekunder (Lilit)
� = Arus pada sisi primer (A)
Prinsip Kerja Trafo Satu Fasa
Saat kumparan primer diberi sumber energi, maka akan mengalir arus � pada
kumparan tersebut. Dengan adanya inti dan arus � akan menghasilkan fluks
magnit yang juga berubah-ubah terhadap waktu. Hal ini akan menyebabkan fluks
yang dihasilkan pada kumparan sekunder akan menghasilkan GGL induksi . [5]
Untuk mencari nilai GGL yang dibangkitkan digunakan persamaan sebagai
berikut ini:
� =� = 4,44.f. � .∅∅��. −8� �� (2-39)
� =� = 4,44.f. � .∅∅��. −8� �� (2-40)
G. Relay [5]
Relay merupakan saklar otomatis yang bekerja berdasarkan magnet permanen
yang berada disisi kontak relay, sehingga apabila kumparan pada relay
dihubungkan dengan sumber tegangan maka relay akan bekerja. Pada relay
terdapat dua kondisi yaitu kondisi normaly open (NO) dan normaly close (NC). Saat relay bekerja akan berlaku kondisi yang sebaliknya. Relay terdisi dari 3 bagian utama diantaranya:
1. Koil: Lilitan
3. Kontak: Terdiri dari NO dan NC.
Jenis-jenis dari relay yaitu:
1. SPST: single pole single throw
2. SPDT: single pole double throw, ada 5 buah pin yaitu: koil (2), common(1), NC (1), NO (1).
3. DPST: double pole single throw, sebanding dengan 2 buah saklar atau relay
SPST.
4. DPDT: double pole double throw, sebanding dengan 2 buah saklar atau relay
DPDT.
5. QPDT: quadruple pole double throw, atau 4 PDT, sebanding dengan relay
[image:44.595.180.444.532.642.2]SPDT atau 2 buah relay DPDT. Terdiri dari 14 pin, termasuk 2 buah koil
Gambar 2. 18. Jenis Relay Menurut Jumlah Terminal Kontak
H. Pengukuran Arus AC [10]
Untuk mendapatkan pengukuran arus di butuhkan beban resistor shunt merupakan resistor yang dirangkai seri pada beban dan megubah arus menjadi tegangan.
Tegangan tersebut biasanya di umpankan ke current transformer terlebih dahulu sebelum masuk kerangkaian pengkondisi sinyal. Teknologi hall effect yang diterapkan oleh perusahaan Allegro menggantikan resistor shunt dan current transformer menjadi sebuah sensor yang ukuran yang relatif jauh lebih kecil yaitu ACS712 yang ditunjukkan pada gambar 2.15.
[image:45.595.150.474.595.702.2]Istilah dari Hall Effect dikenal setelah Edwin H. Hall (1855-1938) menemukan bahwa jika arus listrik mengalir melalui penghantar yang ditempatkan pada
tranverse medan magnet yang kuat, akan menghasilkan beda potensial yang melewati penghantar pada kedua sudut penghantar itu. Hall Effect Sensor adalah suatu transduser yang dapat mengubah besaran medan magnet menjadi besaran listrik yaitu berupa tegangan. Sensor Hall effect digunakan untuk mendeteksi kedekatan, keberadaan atau ketiadaan medan magnet dari suatu objek dengan
kritis. Sensor Hall effect digunakan untuk sensor perpindahan, sensor letak atau jarak, sensor kecepatan dan sensor arus.
Konduktor atau Hall Effect elemen berbentuk lempengan pipih. Mengalirkan arus di dalamnya didorong ke tepi atas oleh gaya magnet yang bekerja padanya. Gaya
ini merupakan gaya nonelektrostatik, besar medan nonelektrostatik sama dengan
gaya satuan muatan. Jika pembawa muatan itu elektron, akan ada muatan lebih
menumpuk di pinggir atas lempengan dan meninggalkan muatan lebih menumpuk
di pinggir bawah, sampai medan elektrostatik tranverse dalam konduktor sama dan berlawanan dengan nonelektrostatik.
Arus tranversal akhir sama dengan nol, maka konduktor itu berada pada
“rangkaian terbuka” dalam arah tranversal, dan beda potensial antara tepi-tepi
lempeng, yang dapat diukur dengan meter, sama dengan GGL Hall dalam
lempeng. Ketika konduktor yang dialiri arus diletakkan di dalam suatu medan
magnet, akan dihasilkan tegangan yang tegak lurus dengan arus dan medan
Material semikonduktor (Hall Element) dilewati arus. Tegangan keluaran tegak lurus dengan arah arus. Ketika tidak ada medan magnet, penyaluran arus sama
besar dan tidak ada tegangan seperti pada gambar 2.16(a) Pada saat terdapat
medan magnet tegak lurus terhadap bidang seperti gambar 2.16(b) gaya Lorentz
mendesak arus. Gaya ini mengganggu penyebaran arus, menghasilkan tegangan
pada output. Tegangan ini adalah tegangan Hall( VH).
(a)
[image:47.595.189.454.294.690.2](b)
I. Kesalahan Dalam Pengukuran (Error) ) [11]
Pengukuran yang sangat sulit yaitu untuk melihat hasil pengukuran yang benar,
sebagai contoh yang sering dilakukan dalam pengukuran hanya berdasar nilai
perkiraan. Maka dari itu untuk merancang sebuah alat ukur diperlukan nilai
pembanding antara nilai pengukuran pada alat ukur yang ada dengan nilai
perhitungan berdasarkan persamaan-persamaan yang berlaku. Nilai pengukurang
yang didapat tersebut dibandingkan untuk megetahui besar kesalahan dalam
pengukurang (Error), sehingga dapat diketahui tingkat ketelitian alat ukur yang dibuat yang selanjutnya akan menentukan kualitas dari alat ukur tersebut.
Klasifikasi alat ukur listrik menurut Standar IEC No. 13B-23 menspesifikasikan
bahwa ketelitian alat ukur dibagi menjadi 8 kelas yaitu : 0,05; 0,1; 0,2; 0,5; 1,0;
1,5; 2,5; dan 5.Kelas-kelas tersebut artinya bahwa besarnya kesalahan alat ukur
masing-masing adalah ±0,05%, ±0,1%, ±0,2%, ±0,5, ±1,0%, ±1,5%, ±2,5%, dan
±5%. Dari 8 kelas alat ukur tersebut digolongkan menjadi 4 golongan sesuai
dengan daerah pemakaiannya, yaitu :
1) Golongan dari kelas 0,05, 0,1 dan 0,2 termasuk alat ukur presisi yang
tertinggi, biasa digunakan pada laboratorium yang standar.
2) Golongan dari kelas 0,5 memiliki ketelitian dan tingkat presisi berikutnya
dari 0,2. Alat ukur ini biasa digunakan pada pengukuran-pengukuran
presisi. Alat ukur ini biasanya portabel.
3) Golongan dari kelas 1,0 memiliki ketelitian dan tingkat presisi yang lebih
rendah dari alat ukur kelas 0,5. Alat ini biasa digunakan pada alat-alat ukur
4) Golongan dari kelas 1,5, 2,5 dan 5. Alat ukur ini biasa digunakan pada
panel-panel yang tidak begitu memperhatikan presisi dan ketelitian.
Ada beberapa cara dalam menentukan kesalahan, namun yang umum digunakan
adalah dengan menentukan persentasi kesalahan (percent of error menggunakan persamaan berikut :
persen error =|nilai pengukuran − nilai pembanding|nilai pembanding x % − 4
J. Proteksi Motor Induksi 3 Fasa [5]
Proteksi atau pengaman merupakan suatu alat pendukung dalam sebuah sistem
kelistrikan untuk menghindari perubahan yang dapat merugikan peralatan yang
ada. Sebagai contoh generator, motor listrik, transformator, jaringan terlindungi adanya peralatan ini terhindar kondisi abnormal berupa hubung singkat, tegangan
lebih, beban lebih, frekuensi rendah dan kesalahan dalam pengkopelan rangkaian
tiga fasa yang mengakibatkan ketidak seimbangan sistem 3 fasa yang biasa
disebut unbalance. Dapat kita simpulkan bahwa pengamanan suatu sistem kelistrikan sangat pengting untuk mengatasi permasalahan sebagai berikut:
1. Mencegah gangguan yang terjadi secara tiba-tiba ataupun bersifat lambat.
2. Pengaman diharapkan dapat melokalisir gangguan, maka ganguan tidak
Persyaratan Sistem Proteksi [5]
Persyaratan suatu sistem proteksi berlaku syarat-syarat dengan perencanaan yang
bersifat efektit sebagai berikut:
a. Selektivitas
Selektivitas merupakan sistem proteksi dapat dilihat dari kinerja sisitem dan
melokalisir bagian yang mengalami gangguan.
b. Stabilitas
Sifat yang tetap bila terjadi gangguan terjadi diluar lokasi yang dilindungi dan
memiliki kemampuan yang konstan seiring dengan waktu.
c. Kecepatan operasi
Pengamanan harus memiliki tingkat kecepatan yang tinggi dalam menangani
gangguan yang terjadi pada peralalatan yang dilindungi.
d. Sensitivitas
Pepngaman harus memiliki tingkat kepekaan terhadap ganguan yang terjadi
sehingga dapat dengan cepat melokalisir gangguan.
e. Ekonomis
Pengaman harus dilihat dari segi ekonomis sesuai dengan pengguan alat proteksi
peralatan. Pegaman yang digunakan harus bernilai kecil dari peralatan yang
diamankan.
f. Handal
Handal yang dimaksudkan pada alat proteksi ialah mampu bekerja dalam kondisi
konstan sekalipun terjadi ganguan yang terjadi.
BAB III
METODE PENELITIAN
A. Tempat dan Waktu
Penelitian dan perancangan tugas akhir ini dimulai sejak bulan agustus 2014 sampai
febuari 2015, dilakukan laboratorium terpadu teknik elektro universitas lampung.
B. Alat dan Bahan
- Alat yang digunakan dalam penelitian ini diantaranya sebagai berikut:
1. Komputer (PC)
2. Voltmeter
3. Tang Ampere
4. Tang potong
5. Tang lancip
6. Obeng +
7. Obeng -
8. Solder
- Bahan-bahan yang digunakan ialah sebagai berikut:
1. Raspberry pi
2. Adaptor
3. SD Card 8GB 4. Trafo 1 A
5. ADC MCP3008
6. Komponen Elektronika
7. Jumper
8. ACS712-5A
9. Papan plastik mika (Accrilyc) 10.PCB
11.Timah solder
C. Prosedur Kerja
Dalam menyelesaian tugas akhir ini ada beberapa langkah kerja yang dilakukan
untuk mencapai hasil akhir yang diinginkan, diantaranya:
1. Studi literatur
2. Spesifikasi rancangan
3. Perancangan perangkat keras
4. Perancangan perangkat lunak
5. Pengujian
6. Pengambilan data
7. Pengolahan data
Studi literatur
Perancangan
Perangkat Keras
Realisasi Perancangan
Perangkat keras
Pemrograman Rapsberry pi
Selesai Pengujian alat secara keseluruhan Tidak
Ya
Pembuatan program
Tidak
Ya
Ya
[image:54.595.112.522.93.596.2]Tidak
Gambar 3.1. Diagram alir pengerjaan tugas akhir Program
bekerja Ide
Perangkat keras
D. Studi Literatur
Dalam menyelesaikan tugas akhir perlu adanya studi literatur dilakukan pencarian
informasi mengenai dan berkaitan dengan penelitian ini, diantaranya adalah:
a. Karakteristik dan spesifikasi motor induksi 3 fasa yang menggunakan hubung
bintang segitiga.
b. Data sheet ACS712-5A
c. Karakteristik komponen-komponen yang akan digunakan serta prinsip kerjanya.
d. Cara kerja dan pemrograman Raspberry pi
E. Spesifikasi Rancangan
Secara garis besar perancangan sistem pada tugas akhir ini adalah seperti gambar
[image:55.595.123.493.472.700.2]di bawah ini :
Gambar 3.2. Diagram Blok Perancangan Sistem AC 3 Fasa
AC 1 Fasa
Pendeteksi 3 Fasa
Relay
Rapsberry Pi
Kontaktor
Power Supply
Y
∆
Sensor
Arus
Push Button
Pada gambar diatas menunjukan dari sumber tiga fasa mengalir ke pendektisi
tegangan tiga fasa disini untuk mengetahui adanya sumber tiga fasa antara fasa R,
fasa S dan fasa T serta tegangan pada tiap fasa terbaca sesuai dengan nilai tegangan
yang ditentukan. Setelah itu pada push button untuk memberi masukan ke rapsberry menghidupkan relay. Relay ini digunakan menghidupkan kontaktor dan kemudian kontaktor akan menyambungkan sumber tiga fasa ke motor serta menstart bintang-segitiga sesuai pembacaan sensor arus.
F. Perancangan Perangkat Keras
Dari gambar diagram blok perancangan sistem perangkat keras yang digunakan
adalah sebagai berikut:
a. Push Button
Dalam perancangan push button yang dimana digunakan untuk memerintah alat yang digunakan sebagai masukan kepada rapsberry menghidupkan relay. Relay
digunakan untuk memberi induksi pada kumparan kontaktor saat itu saluran tiga
fasa mengalirkan ke motor sambungan bintang-segitiga sesuai pembacaan sensor.
Gambar 3.3.Push Button
c. Relay
Gambar 3.4.Relay
c. Sensor Tegangan
Sensor tegangan berfungsi sebagai pendeteksi keberadaan sumber tiga fasa. Jika
salah satu sumber fasa mati maka motor tidak dapat melakukan starting atau saat motor sedang beroperasi kemudian salah satu sumber fasa mati motor akan berhenti
beroperasi dan proteksi terhadap tegangan antara fasa sesuai nilai tegangan yang
telah ditentukan. Hal tersebut bertujuan untuk memproteksi motor tiga fasa yang
digunakan dari ketidakseimbangan fasa dan proteksi keseimbangan tegangan antara
fasa dan keberadaan sumber tiga fasa dalam mensuplay motor induksi tiga fasa. Sensor tegangan dibuat seperti pada gambar berikut:
[image:58.595.176.450.623.709.2]d. Sensor Arus
Sensor arus yang dipakai pada tugas akhir ini direncanakan mengukur arus pada
satu fasa sebagai nilai arus normal starting motor tiga fasa saat hubungan bintang dan saat kondisi motor beroperasi sesuai nilai arus ditentukan dan memproteksi
nilai arus yang besar. Rangkaian sensor disearahkan agar tegangan outputnya
berupa sumber DC, tegangan yang keluaran dari penyearah maksimal sebesar 5V
untuk keamanan rapsberry tegangan diturunkan dengan rangkain pembagi tegangan
sebesar 3,3V. Kapasitor yang dipasang pada rangkain berguna sebagai filter untuk
mendapatkan sinyal yang baik. Sensor arus yang digunakan pada rangkaian
[image:59.595.132.511.392.582.2]ACS712 30A. Rangkai sensor arus keseluruhan dapat dilihat pada gambar 3.6.
e. Sensor, Push Button dan Relay dengan Rapsberry Pi
Setelah semua rangkaian selesai dibuat, langkah selanjutnya dalam perancangan
perangkat keras adalah menghubungkan semua sensor, Push Button dan relay ke
[image:60.595.122.508.221.399.2]rapsberry pi. Hubungan tersebut ditampilkan sebagai gambar seperti dibawah ini:
Gambar 3.7. Rangkaian Hubungan Sensor, Push Button dan Relay dengan Rapsberry Pi
f. Sambungan Bintang-Segitiga
Motor induksi 3 fasa dengan beban yang besar membutuhkan arus yang besar
namun tidak terbebani tegangan penuh saat starting, jika dihubungkan secara langsung segitiga arus starting yang dibutuhkan oleh motor listrik sebesar 5 s/d 7 arus nominal akan mempengaruhi suplay daya yang digunakan. Untuk mencegah terjadinya lonjakan arus yang besar terlebih dahulu diasut dengan hubungan bintang
setelah berjalan normal, arus akan menurun setelah itu dipindahkan ke hubungan
segitiga sehingga mendapatkan nilai tegangan penuh bertujuan meningkatkan
dirancang untuk starting motor induksi tiga fasa, saat kumparan kontaktor magnit satu mendapat sumber tegangan dari relay satu, sumber tegangan mengalir kemotor dan relay dua menghidupkan kontaktor dua pada saat itu motor menstart dalam hubungan bintang. Setelah motor bekerja dalam hubungan bintang, arus akan turun
sampai arus normal dan rapsberry memerintah kontaktor dua mati dan kontaktor tiga hidup untuk sambungan segitiga.[7] Hubungan pengasutan ini bertujuan untuk
menekan pembayaran listrik yang besar dan pemeliharan motor, bahkan pergantian
motor induksi yang terbakar akibat arus start tidak sesuai dengan arus nominal atau kelebihan beban pada suplay daya. Gambar rangkaian dapat dilihat pada bab 2 bagian B.
G. Perancangan Perangkat Lunak
Perancangan perangkat lunak pada tugas akhir ini dilakukan dengan rapsberry pi, program yang didalamnya meliputi:
1. Program pembacaan sensor, saklar start/stop serta program pengatur GPIO
rapsberry ke relay.
2. Program untuk mencatat kerja motor 3 fasa ke dalam database.
H. Kalibrasi
Untuk membuat sebuah alat ukur digital perlu diketahui bahwa nilai yang terukur
Misalnya pada penenelitian ini mengunakan trafo step-down sebagai sensor tegangan. Masukan trafo sebesar 220V mengeluarkan tegangan 3V, maka
diperlukan kalibrasi nilai pengali yang mewakili tegangan 3V sebesar 220V pada
sensor tegangan yang dibuat. Pada penelitian ini yang perlu dikalibrasi yaitu sensor
tegangan dan sensor arus. Untuk pengkalibrasi sensor arus ACS712-30A
sebenarnya pada datasheet telah disebutkan nilai kalibrasinya, yaitu saat tegangan output sensor bernilai 0V sampai 2,5V maka arus yang diukur yaitu -30A sampai
0A, dan saat tegangan output sensor sebesar 2,5V sampai 5V maka arus yang diukur
adalah 0A sampai 30A. Kemudian dari nilai kalibrasi sensor arus tersebut terlihat
bahwa nilai output maksimal sensor yaitu 5V, sedangkan pada GPIO Raspberry Pi
tegangan yang diizinkan maksimal hanya sebesar 3,3V, dengan demikian sebelum
masuk ke GPIO perlu dilakukan pengkondisian sinyal agar tegangan output sensor
tidak melebihi 3,3V, sehingga nilai kalibrasi pada datasheet sensor arus tersebut tidak relevan lagi untuk digunakan.
Untuk melakukan kalibrasi sensor arus dan tegangan yang dibuat, digunakan alat
ukur digital yang sudah ada. Pada penelitian ini menggunkan Digital Power Clamp
Meter (gambar 3.8) yang tersedia di Laboratorium Teknik Pengukuran jurusan
Teknik elektro Unila. Digital Power Clamp Meter adalah sebuah alat ukur digital
yang dapat mengukur arus (A), tegangan (V), faktor daya (Cos θ), daya (W), dan
konsumsi energi (kWh). Sebagai contoh untuk melakukan kalibrasi misalkan output
sensor tegangan sebesar 3V, kemudian dilakukan pengukuran pada sisi input sensor
menggunakan alat ukur yang sudah ada dan hasil pengukurannya adalah 220V.
Agar alat ukur yang dibuat juga menunjukkan angka 220V maka dibuat nilai
3V . x = 220V
x = 220V / 3V
x = 73,33
Dimana: 3V : Nilai tegangan output sensor.
220V : Nilai tegangan hasil pengukuran. x : Nilai pengali.
Nilai pengali yang didapat dari metode diatas selanjutnya digunakan pada
pemrograman yang dibuat pada Raspberry Pi untuk membaca sensor dan
[image:63.595.170.455.387.550.2]menampilkan hasil pengukurannya.
Gambar 3.8.DigitalPower Clamp Meter (Tersedia di Lab. Teknik Pengukuran J.TE. Unila)
I. Pengujian
Pengujian dilakukan untuk mendapatkan apakah sistem bekerja sesuai dengan
a. Pengujian sensor tegangan
Pengujian sensor tegangan ini melakukan pengukuran nilai tegangan yang
berubah-ubah besarannya menggunakan dua buah alat ukur yang berbeda, yaitu sensor
tegangan yang dibuat dengan alat ukur Voltmeter. Dari pengujian yang dilakukan
bertujuan untuk membuktikan apakah sensor tegangan yang dibuat dapat
melakukan pengukuran yang baik dengan cara membandingkan hasil pengukuran
sensor yang dibuat dengan hasil pengukuran Voltmeter.
b. Pengujian sensor arus
Pengujian sensor arus dilakukan dengan cara memberikan beban listrik dengan
daya atau tegangan yang berubah-ubah, setelah itu dilakukan pengukuran arus yang
mengalir ke beban. Pengukuran arus menggunakan sensor arus yang dibuat dan alat
ukur Ampere meter, kemudian hasil pengukuran sensor yang dibuat dibandingkan
dengan pengukuran Ampere meter apakah sensor arus dibuat dapat bekerja dengan
baik atau tidak.
c. Pengujian sistem
Setelah pengujian yang dilakukan pada masing-masing sensor, kemudian dilakukan pengujian keseluruhan sistem starting motor induksi tiga fasa. Setelah hardware
terpasang, membuat pemrograman Python untuk starting hubungan bintang-segitiga serta proteksi pada motor. Selanjutnya merekam kinerja motor induksi pada
Gambar 3.9. Alat Ukur Digital. (Tersedia di Lab. Konversi Energi Elektrik J.T.E. Unila)
Gambar 3.10.Regulator Tegangan (Tersedia di Lab. Konversi Energi Elektrik J.T.E. Unila)
Untuk pengujian yang dilakukan pada sensor tegangan, dibutuhkan tegangan yang
berubah-ubah dari regulator tegangan yang tersedia di Laboratorium Konversi Energi Unila (Gambar 3.10. Sedangkan alat ukur yang digunakan pada pengujian
ini adalah Digital Power Clamp Meter atau Alat ukur digital (Gambar 3.8) tersedia di Laboratorium Teknik Pengukuran Unila dan Alat ukur Digital (Gambar 3.9)
[image:65.595.185.439.353.539.2]BAB V
SIMPULAN DAN SARAN
A. Simpulan.
Ada beberapa kesimpulan yang didapat dari hasil analisa dan pengujian dari alat
yang dibuat antara lain:
1. Peralatan starting motor induksi 3 fasa bintang-segitiga dengan pengaman gangguan raspberry pi dapat bekerja dengan baik dalam starting motor induksi dan mengamankan dalam ganguan.
2. Dari hasil pengujian starting motor induksi 3 fasa bintang-segitigasecara langsung (DOL) arus sangat besar untuk mendapatkan torsi motor yang besar
sehingga motor dapat bekerja pada kondisi nominal dengan cepat tetapi
hubungan bintang-segitiga dapat memperkecil arus start dengan torsi yang lebih kecil dan motor akan lama mencapai kondisi nominalnya.
3. Setting arus starting untuk perpindahan hubungan dari bintang ke segitiga sangat menentukan kondisi starting motor induksi, pada motor berkapasitas kecil sangat sulit ditentukan.
4. Arus starting dan kecepatan pada pengujian berbeban diketahui saat start awal arus lonjakan sebesar 3,601A setelah motor bekerja pada arus normal terukur
arus sebesar 0.6925A untuk berpindah sambungan ke segitiga dengan arus
sedangkan kecepatan perpindahan sambungan sebesar 0,25s dan hubungan
DOL arus start sangat besar, arus lonjakan sebesar 4.709A setelah itu arus berangsur-angsur menurun sampai arus normal kerja dari motor sebesar 3,3A.
B. Saran.
Untuk lebih menyempurnakan dari alat yang dibuat ada beberapa saran yang perlu
dilakukan diantaranya:
1. Peralatan starting motor induksi 3 fasa bintang-segitiga dengan pengaman
gangguan raspberry pi lebih sesuai untuk diuji dan digunakan pada motor
induksi berkapasitas besar dengan rentang arus start yang besar.
2. Peralatan starting motor induksi 3 fasa bintang-segitiga ini dapat
DAFTAR PUSTAKA
[1] Siswoyo.2008. Teknik Listrik Industri jilid 2, Penerbit: Direktorat Pembinaan Sekolah Menengah Kejuruan, Direktorat Jenderal Menajemen Pendidikan Dasar dan Menengah Dapertemen Pendidikan Nasional, Jakarta.
[2] Reza Fakhrizal. 2007. Aplikasi ProgramMable Controller (PLC) Pada Pengasutan dan Proteksi Bintang (Y)-Segitiga () Motor Induksi Tiga Fasa,
Penerbit: Universitas Dipajajaran, Bandung.
[3] Jimmie J. Cathey McGraw-Hill Co. 2001. , Electric Machine: Analysis and Design. Singapore
[4] Theraja.A.K Theraja.BL.T1999.elcetrical technology.S Chend & company. New Delhi.
[5] Sujarot. 2012. Rancang Bangun Starting Motor Induksi 3 Fasa Hubung bintang-segitiga dilengkapi pengaman 3 Fasa Berbasis Mikrokontroler ATMEGA8535, Penerbit: Universitas Lampung, Lampung.
[6] Yusnan Badruzzaman. 2012. Pengasutan Konvesional Motor Induksi Tiga Fasa Rotor Sangkar Tupai, Penerbit: Politeknik Negeri Semarang, Semarang.
[7] Hotdes Lumbanraja. 2013. Pengaruh Beban Tidak Seimbang Terhadap
Efisiensi Transformator Tiga Fasa Hubungan Open-Delta, Penerbit: Universitas Sumatera Utara, Medan.
[8] Raspberry Pi. 2014. http://en.wikipedia.org/wiki/Raspberry_Pi. diakses : 25 maret 2014 jam 20.15.
[9] Gator Priowirjanto. Dr. Ir. 2003. Starting Motor Tiga Fasa, Penerbit: Direktorat Pembinaan Sekolah Menengah Kejuruan, Direktorat Pendidikan Dasar dan Menengah Dapertemen Pendidikan Nasional, Jakarta.
[10] Thamrin, Ihsan. 2010. Perancangan kWh Meter Digital Menggunakan
am3/lerror.htm. diakses : 22 desember 2014 jam 09:02.
[12] Waluyanti, Sri. 2008. Alat Ukur dan Teknik Pengukuran. Penerbit Direktorat Pembinaan Sekolah Menengah Kejuruan. Jakarta.

![Gambar 2. 10. Diagram Starting Bintang-Segitiga Motor Induksi. [4]](https://thumb-ap.123doks.com/thumbv2/123dok/557622.152616/36.595.131.489.189.501/gambar-diagram-starting-bintang-segitiga-motor-induksi.webp)