PENGGUNAAN METODE HOMOTOPI PADE'
UNTUK MENYELESAIKAN MASALAH
LOTKA
–
VOLTERRA LOGISTIK
EMBAY ROHAETI
SEKOLAH PASCASARJANA
INSTITUT PERTANIAN BOGOR
BOGOR
PERNYATAAN MENGENAI TESIS
DAN SUMBER INFORMASI
Dengan ini saya menyatakan bahwa tesis “Penggunaan Metode Homotopi
Pade
'
untuk Menyelesaikan Masalah Lotka–Volterra Logistik” adalah karya saya dengan arahan dari komisi pembimbing dan belum diajukan dalam bentuk apapun kepada perguruan tinggi manapun. Sumber informasi yang berasal atau kutipan dari karya yang diterbitkan dari penulis lain telah disebutkan dalam teks dan dicantumkan dalam Daftar Pustaka di bagian akhir tesis ini.Bogor, Juni 2012
ABSTRACT
EMBAY ROHAETI. Application of Pade
'
Homotopy Method to Solve Logistic Lotka–Volterra Problem. Supervised by JAHARUDDIN and ALI KUSNANTO.In this research, the problems of Lotka–Volterra and Lotka–Volterra with prey logistic growth models are solved by using homotopy and Pade
'
homotopy methods. The homotopy method is an analytical approach to solve non linear problems. The solution of homotopy method is common series. The solution of the problem using Pade'
homotopy method is obtained by using the result of applying the homotopy method and then transforming the equation into the form of rational function. The results of homotopy and Pade'
homotopy methods are compared with some numerical solutions. The result shows that in solving Lotka– Volterra and Lotka–Volterra with prey logistic growth, the Pade'
homotopy method is better than homotopy method because the Pade'
homotopy method covers a larger area of convergence and produces smaller errors.RINGKASAN
EMBAY ROHAETI. Penggunaan metode homotopi Pade
'
untuk menyelesaikan masalah Lotka–Volterra logistik. Dibimbing oleh JAHARUDDIN dan ALI KUSNANTO.Makhluk hidup di bumi ini terdiri dari bermacam–macam spesies yang berbentuk populasi dan hidup bersama. Makhluk hidup selalu bergantung kepada makhluk hidup yang lain. Tiap individu akan selalu berinteraksi dengan individu lain yang sejenis atau lain jenis, baik individu–individu dalam satu populasi atau individu–individu dari populasi lain. Ada beberapa jenis interaksi yang dapat terjadi antar spesies. Salah satu interaksi tersebut adalah predasi yaitu hubungan antara mangsa (prey) dan pemangsa (predator).
Model Lotka–Volterra atau model mangsa–pemangsa merupakan model interaksi antar spesies mangsa dan spesies pemangsa pada sebuah lingkungan. Interaksi spesies tersebut memiliki peranan penting pada pertumbuhan populasi yang berubah secara dinamik seiring dengan perubahan populasi yang ada. Model Lotka–Volterra logistik dibentuk berdasarkan pada model Lotka–Volterra dengan menambahkan asumsi keterbatasan logistik untuk spesies mangsa. Sumber makanan yang terbatas untuk spesies mangsa, dapat mempengaruhi laju pertumbuhan pada spesies mangsa. Model Lotka–Volterra dan model Lotka– Volterra logistik, suatu model matematika yang dinyatakan dalam bentuk sistem persamaan diferensial taklinear. Sistem persamaan diferensial taklinear ini tidak dapat diselesaikan secara eksak, maka pada penelitian ini penyelesaian acuan yang digunakan adalah penyelesaian numerik dengan metode Runge Kutta empat (RK4).
Metode homotopi adalah suatu metode pendekatan analitik untuk menyelesaikan suatu masalah taklinear. Penyelesaian dengan menggunakan metode homotopi ini dilakukan dengan memisalkan penyelesaiannya dalam bentuk deret yang umum. Metode homotopi Pade' merupakan pengembangan dari metode homotopi. Hasil penyelesaian dengan menggunakan metode homotopi Pade' dilakukan dengan menggunakan penyelesaian yang diperoleh dari metode homotopi. Dalam hal ini persamaan dari penyelesaian dengan metode homotopi diubah ke dalam bentuk fungsi rasional dengan koefisien–koefisien bergantung pada penyelesaian dengan metode homotopi.
Penelitian ini merupakan pengembangan dari penelitian sebelumnya oleh Faghidian pada tahun 2011, yaitu penggunaan metode homotopi Pade' untuk menyelesaikan model Lotka–Volterra. Dalam penelitian ini, metode homotopi dan metode homotopi Pade' digunakan untuk menyelesaikan model Lotka–Volterra logistik. Dalam penelitian ini diselesaikan dua kasus untuk model Lotka–Volterra dan model Lotka–Volterra logistik. Pada kasus pertama, mangsa lebih banyak dari pemangsa, sedangkan kasus kedua mangsa lebih sedikit dari pemangsa.
sebagai penyelesaian acuan atau penyelesaian pembanding. Hasil perbandingan tersebut menunjukkan bahwa keakuratan penyelesaian yang diperoleh dengan metode homotopi dan metode homotopi Pade' didasarkan pada banyaknya suku yang digunakan. Semakin banyak suku yang digunakan, penyelesaiannya akan semakin mendekati penyelesaian pembanding. Dari hasil perbandingan suku yang digunakan tersebut diperoleh bahwa metode homotopi Pade' lebih baik dari metode homotopi. Hal ini terlihat pada daerah kekonvergenan metode homotopi Pade' yang lebih luas dan galat yang dihasilkan lebih kecil. Metode homotopi Pade' mempunyai kelemahan berupa proses komputasi yang lama. Hal ini dikarenakan dengan metode homotopi Pade', penyelesaiannya berupa fungsi rasional yang diperoleh secara rekursif.
© Hak Cipta milik Institut Pertanian Bogor, tahun 2012
Hak Cipta dilindungi undang-undang
1. Dilarang mengutip sebagian atau seluruh karya tulis ini tanpa mencantumkan atau menyebutkan sumber.
a. Pengutipan hanya untuk kepentingan pendidikan, penelitian, penulisan karya ilmiah, penyusunan laporan, penulisan kritik, atau tinjuan suatu masalah.
b. Pengutipan tidak merugikan kepentingan yang wajar Institut Pertanian Bogor.
PENGGUNAAN METODE HOMOTOPI PADE'
UNTUK MENYELESAIKAN MASALAH
LOTKA
–
VOLTERRA LOGISTIK
EMBAY ROHAETI
Tesis
Sebagai salah satu syarat untuk memperoleh gelar
Magister Sains pada
Program Studi Matematika Terapan
SEKOLAH PASCASARJANA
INSTITUT PERTANIAN BOGOR
BOGOR
Judul Tesis : Penggunaan Metode Homotopi Pade' untuk Menyelesaikan Masalah Lotka–Volterra Logistik.
Nama : Embay Rohaeti
NIM : G551100011
Disetujui Komisi Pembimbing
Dr. Jaharuddin, M.S. Drs. Ali Kusnanto, M.Si. Ketua Anggota
Diketahui
Ketua Program Studi Dekan Sekolah Pascasarjana IPB S2 Matematika Terapan
Dr. Ir. Endar H. Nugrahani, M.S. Dr. Ir. Dahrul Syah, M.Sc.Agr
PRAKATA
Puji dan syukur penulis panjatkan kepada Allah SWT, atas segala rahmat dan inayah dari–Nya sehingga tesis yang berjudul “Penggunaan Metode Homotopi Pade' untuk Menyelesaikan Masalah Lotka–Volterra Logistik” dapat diselesaikan untuk memenuhi salah satu persyaratan dalam penyelasaian studi pada Program Pascasarjana Institut Pertanian Bogor.
Terimakasih penulis ucapkan kepada Bapak Dr. Jaharuddin, M.S. dan Bapak Ali Kusnanto, M.Si. selaku pembimbing yang telah banyak memberikan arahan dan bimbingan sehingga selesainya tesis ini. Terimakasih juga penulis sampaikan kepada Ibu Dr. Endar H Nugrahani, MS. selaku penguji luar komisi dan Ibu Dr. Berlian Setiawaty, M.S., selaku penguji pendamping yang telah banyak memberikan saran. Ungkapan terimakasih juga disampaikan kepada kedua orangtua atas segala doanya, dosen-dosen departemen Matematika Terapan IPB, sahabat dan semua pihak yang telah membantu dalam penyusunan tesis ini. Semoga penelitian ini bermanfaat.
RIWAYAT HIDUP
Penulis dilahirkan di Bogor pada tanggal 4 Januari 1979 dari Bapak Nazaruddin Latief dan Ibu Uun Sayunah.
Tahun 1996 penulis lulus dari SMUN Leuwiliang Bogor, dan pada tahun yang sama menempuh pendidikan sarjana di Program Studi Matematika, Fakultas Matematika dan Ilmu Pengetahuan Alam, Universitas Pakuan Bogor. Pada tahun 2010, penulis diterima di Program Studi Matematika Terapan pada Sekolah Pascasarjana Institut Pertanian Bogor.
Penulis bekerja di Program Studi Matematika FMIPA Universitas Pakuan sejak tahun 2000 sampai sekarang.
DAFTAR ISI
Halaman
DAFTAR GAMBAR ... i
DAFTAR LAMPIRAN ... ... ii
I PENDAHULUAN ... 1
1.1 Latar Belakang ... 1
1.2 Tujuan ... 2
1.3 Sistematika Penulisan ... 2
II LANDASAN TEORI ... 3
2.1 Metode Homotopi ... 3
2.2 Perluasan Metode Homotopi ... 6
2.3 Metode Homotopi Pade
'
... 92.4 Perluasan Metode Homotopi Pade
'
... 92.5 Contoh Masalah ... 11
2.6 Model Matematika... 14
2.6.1 Model Lotka–Volterra ... 14
2.6.2 Analisis Model Lotka–Volterra ... 16
2.6.3 Model Lotka–Volterra Logistik ... 17
2.6.4 Analisis Model Lotka–Volterra Logistik ... 18
III HASIL DAN PEMBAHASAN ... 21
3.1 Model Lotka–Volterra ... 21
3.1.1 Kasus Pertama Model Lotka–Volterra ... 24
3.1.2 Kasus Kedua Model Lotka–Volterra ... 26
3.2 Model Lotka–Volterra Logistik ... 27
3.2.1 Kasus Pertama Model Lotka–Volterra Logistik ... 30
3.2.2 Kasus Kedua Model Lotka–Volterra Logistik ... 32
3.2.3 Perbandingan Penyelesaian Model Lotka–Volterra Logistik ... 34
IV KESIMPULAN DAN SARAN ... 35
4.1 Kesimpulan... 35
DAFTAR PUSTAKA ... 37
LAMPIRAN ... 38
DAFTAR GAMBAR
Halaman 1 Penyelesaian masalah nilai awal (2.18). ... 132 Galat penyelesaian masalah nilai awal (2.18)... 14
3 Bidang phase masalah nilai awal (2.23). ... 17
4 Penyelesaian numerik masalah nilai awal (2.23). ... 17
5 Bidang phase masalah nilai awal (2.25). ... 20
6 Penyelesaian numerik masalah nilai awal (2.25). ... 20
7 Penyelesaian masalah nilai awal (3.1) kasus pertama. ... 25
8 Galat penyelesaian masalah nilai awal (3.1) kasus pertama. ... 25
9 Penyelesaian masalah nilai awal (3.1) kasus kedua. ... 27
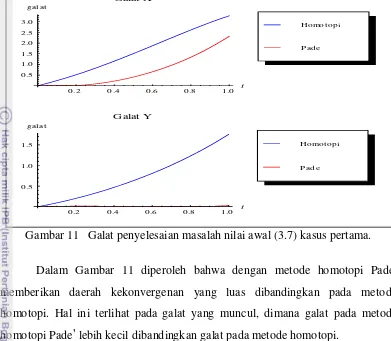
10 Penyelesaian masalah nilai awal (3.7) kasus pertama. ... 31
11 Galat penyelesaian masalah nilai awal (3.7) kasus pertama. ... 32
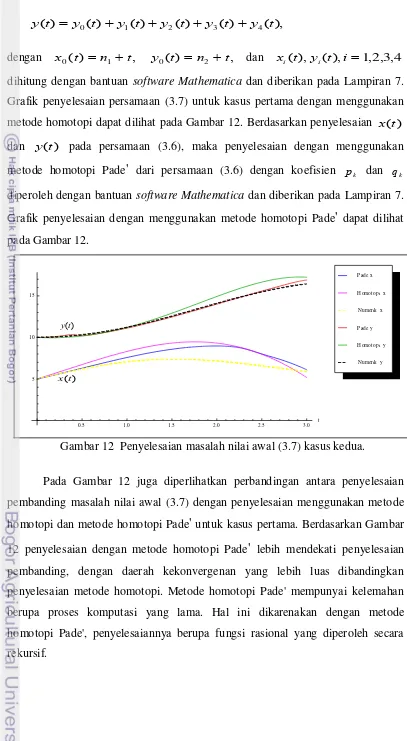
12 Penyelesaian masalah nilai awal (3.7) kasus kedua. ... 33
13 Perbandingan penyelesaian model Lotka–Volterra logistik. ... 34
DAFTAR LAMPIRAN
Halaman 1 Penurunan persamaan (2.8) ... 392 Penurunan persamaan (2.21) ... 43
3 Penyelesaian masalah nilai awal (2.18)... 48
4 Penurunan persamaan (3.4) ... 49
5 Penyelesaian masalah nilai awal (2.22)... 54
6 Penurunan persamaan (3.10) ... 55
I PENDAHULUAN
1.1 Latar Belakang
Makhluk hidup di bumi ini terdiri dari bermacam–macam spesies yang berbentuk populasi dan hidup bersama. Makhluk hidup selalu bergantung kepada makhluk hidup yang lain. Tiap individu akan selalu berinteraksi dengan individu lain yang sejenis atau lain jenis, baik individu–individu dalam satu populasi atau individu–individu dari populasi lain. Ada beberapa jenis interaksi yang dapat terjadi antar spesies. Salah satu interaksi tersebut adalah predasi yaitu hubungan antara mangsa (prey) dan pemangsa (predator). Interaksi ini sangat erat kaitannya karena tanpa mangsa, predator tidak dapat bertahan hidup karena tidak ada sumber makanan. Sebaliknya predator berfungsi sebagai pengontrol populasi mangsa.
Fenomena tersebut dapat dijelaskan dalam suatu model matematika yaitu model Lotka–Volterra. Model matematika tersebut umumnya dinyatakan dalam bentuk sistem persamaan diferensial taklinear. Sistem persamaan diferensial taklinear ini tidak dapat diselesaikan secara eksak, maka pada penelitian ini digunakan penyelesaian numerik sebagai penyelesaian acuan atau penyelesaian pembanding.
Beberapa penelitian difokuskan pada penemuan metode untuk memperoleh penyelesaian dari masalah yang dimodelkan dalam persamaan taklinear. Beberapa metode yang telah digunakan untuk menyelesaikan model Lotka–Volterra antara lain metode dekomposisi Adomian (Biazar 2005), metode iterasi variational (Rafei 2007a) dan metode homotopi pertubasi (Rafei 2007b).
Penelitian ini merupakan pengembangan dari penelitian sebelumnya yang dilakukan oleh Faghidian pada tahun 2011, yaitu penggunaan metode homotopi Pade' untuk menyelesaikan model Lotka–Volterra. Dalam penelitian ini, model yang digunakan yaitu model Lotka–Volterra logistik. Model Lotka–Volterra logistik diselesaikan dengan metode homotopi Pade' dan metode homotopi, hasil penyelesaian kedua metode tersebut kemudian dibandingkan dengan penyelesaian numerik untuk memperoleh metode yang terbaik dalam menyelesaikan model Lotka–Volterra logistik.
1.2 Tujuan
Berdasarkan latar belakang di atas, maka tujuan penelitian ini adalah a. Menggunakan metode homotopi dan metode homotopi Pade' untuk
menyelesaikan model Lotka–Volterra dan Lotka–Volterra logistik.
b. Membandingkan penyelesaian numerik dengan penyelesaian metode homotopi dan metode homotopi Pade'.
1.3 Sistematika Penulisan
II LANDASAN TEORI
Pada bagian ini akan dibahas teori–teori yang digunakan dalam penelitian ini. Teori–teori tersebut meliputi, konsep dasar metode homotopi dan metode homotopi Pade' dan perluasan kedua metode tersebut, model Lotka–Volterra dan model Lotka–Volterra logistik, analisis model Lotka–Volterra dan model Lotka– Volterra logistik berdasarkan pada Haberman (2003).
2.1 Metode Homotopi
Berikut ini diberikan ilustrasi konsep dasar metode homotopi berdasarkan alur pada Liao (2004), Jaharuddin (2008) dan Faghidian (2011). Misalkan diberikan persamaan diferensial berikut
A[y(t)]0, (2.1)
dengan A suatu operator turunan yang taklinear dan � fungsi yang akan ditentukan dan bergantung pada t. Selanjutnya, didefinisikan pula suatu operator linear ℒ yang memenuhi
[f]0, bila f 0. (2.2) Didefinisikan suatu fungsi homotopi sebagai berikut
[(t,q),q] = (1q) ℒ[(t,q) y0(t)]+qA[(t,q)] (2.3)
dengan fungsi yang akan ditentukan dan bergantung pada t dan parameter q.
Fungsi y0(t) merupakan pendekatan awal dari penyelesaian. Berdasarkan persamaan (2.3), pada saat q0 diperoleh persamaan
berikut
((t,0), 0) = ℒ [(t,0) – yo(t)],
((t,1), 1) = A[(t,1)]. Berdasarkan persamaan (2.2), maka penyelesaian persamaan ((t,0), 0) = 0
diperoleh sebagai berikut
(t,0)= yo(t).
Kemudian berdasarkan persamaan (2.1), maka penyelesaian persamaan ((t,1), 1) = 0 diperoleh sebagai berikut
(t,1) = y(t).
Selanjutnya, diberikan fungsi homotopi yang bergantung pada fungsi bantu B(t)
dan parameter bantu h yang didefinisikan sebagai berikut
[(t,q),B(t),h,q] = (1q)ℒ[(t,q)–yo(t)] - qhB(t)A[(t,q)], (2.4)
dengan ℒ operator linear, Aoperator turunan yang bentuknya tak linear, merupakan fungsi yang akan ditentukan dan bergantung pada t dan parameter q. Fungsi yo(t) adalah pendekatan awal.
Berdasarkan persamaan (2.4), pada saat q = 0 diperoleh persamaan berikut
((t,0),B(t),h, 0) = ℒ [(t,0) – yo(t)], dan pada saat q = 1, diperoleh
((t,1),B(t),h, 1) = - hB(t) A[(t,1)]. Berdasarkan persamaan (2.2), maka penyelesaian persamaan ((t,0),B(t),h,
0)=0 diperoleh sebagai berikut
(t,0)= yo(t).
Kemudian berdasarkan persamaan (2.1), maka penyelesaian persamaan ((t,1),B(t),h, 1) = 0 diperoleh sebagai berikut
(t,1) = y(t). Notasikan
, .! )
( 1 0
m m q
m
q q t m
t
y
(2.5)Deret Taylor dari fungsi (t,q) terhadap q di sekitar q = 0 adalah
01 0
1
m m qm q
q t m
t y q
t ,
! )
( )
,
(
m.q (2.6)
( , ) ( )
( ) .
1 0
m
m m t q
y t
y q t
Karena
(t,1) y(t), maka pada saat q = 1 diperoleh ( ) ( )
( ).
1 0
m
m t
y t
y t
y
Jika h1dan B(t)1, maka dari persamaan (2.4) diperoleh [(t,q),q,1,1] = [(t,q),q].
Selanjutnya, fungsi (t,q) adalah penyelesaian dari persamaan berikut: [(t,q),B(t),h,q] = 0
atau
(1q)ℒ [(t,q)–yo(t)] = qhB(t) A[(t,q)]. (2.7)
Kemudian jika kedua ruas pada persamaan (2.7) diturunkan terhadap q hingga m kali, maka diperoleh sebagai berikut :
ℒ[ym(t)mym1(t)] = hB(t) ( 1)
m m y
R (2.8)
dengan
ym 1(t) (y0(t), y1(t),..., ym(t))
( 1)
m m y
R = 1 0
1
1 1
m q
m
q q t A m
)] , ( [ )!
(
(2.9) dan
. ,
,
1 1
1 0
m m
m
(2.10)Penurunan persamaan (2.8) dapat dilihat pada Lampiran 1.
Jadi penyelesaian pendekatan dari persamaan (2.1) dengan metode homotopi adalah
, ) ( )
( )
(
1 0
m
m t
y t
y t y
2.2 Perluasan Metode Homotopi
Pada bagian ini akan dibahas perluasan dari konsep dasar metode homotopi yang telah diuraikan di atas. Misalkan diberikan sistem persamaan diferensial berikut :
A1[u(t),v(t)]0
A2[u(t),v(t)]0, (2.11)
dengan A1 dan A2 suatu operator turunan yang bentuknya taklinear, u dan v
fungsi yang akan ditentukan dan bergantung pada t.
Selanjutnya, didefinisikan suatu fungsi homotopi dan sebagai berikut [(t,q),(t,q),q] = (1q)ℒ1[(t,q)–uo(t)]+qh1A1[(t,q),(t,q)]
[(t,q),(t,q),q] = (1q)ℒ2[(t,q)–vo(t)]+qh2A2[(t,q),(t,q)],
(2.12) dengan ℒ1 dan ℒ2 suatu operator linear , dan fungsi yang akan ditentukan
dan bergantung pada t dan parameter q serta u0(t) dan v0(t) merupakan
pendekatan awal dari penyelesaian. Berdasarkan persamaan (2.12) pada saat q0, diperoleh persamaan
berikut
[(t,0),(t,0),0]= ℒ1[(t,0)–uo(t)]
[(t,0),(t,0),0]= ℒ2[(t,0)–vo(t)],
dan pada saat q1, diperoleh persamaan berikut [(t,1),(t,1),1]= h1A1[(t,1),(t,1)]
[(t,1),(t,1),1]= h2A2[(t,1),(t,1)].
Berdasarkan sifat operator linear ℒ1 dan ℒ2 pada persamaan (2.2), maka
penyelesaian persamaan ((t,0),0)=0 dan ((t,0),0)=0 masing–masing adalah
(t,0)=
u
o(
t
)
dan (t,0)=v
o(
t
)
.Berdasarkan persamaan (2.11), maka penyelesaian persamaan((t,1),1)=0 dan ((t,1),1)=0 masing–masing adalah
Deret Taylor dari (t,q) dan (t,q)terhadap q di sekitar q = 0 adalah
) , ( )
,
(t 0 0 t 0
atau (t,0)0(t)
) , ( )
,
(t 0 0 t 0
atau (t,0)0(t), (2.13) dengan 0(t)u0(t) dan 0(t)v0(t). Pada saat q1dan persamaan (2.13),
diperoleh persamaan berikut
1
0 1
1
m
m t
t
t, ) ( ) ( , )
(
( , ) ( )
( , ).
1
0 1
1
m
m t
t
t
Karena (t,1)= u(t) dan (t,1)= v(t), maka diperoleh
1 0
m
m t
u t
u t
u( ) ( ) ( )
, ) ( )
( )
(
1 0
m
m t
v t
v t v
dengan um(t) dan vm(t), m1,2,... yang akan ditentukan dan u0(t)dan
) (t
v0 merupakan pendekatan awal yang diberikan.
Selanjutnya, fungsi (t,q) dan (t,q) adalah penyelesaian dari persamaan berikut
[(t,q),(t,q),q] = 0 [(t,q),(t,q),q] = 0 atau
(1q)ℒ1[(t,q)–uo(t)] = qh1A1[(t,q),(t,q)]
(1q)ℒ2[(t,q)–vo(t)] = qh2A2[(t,q),(t,q)]. (2.14)
Kemudian jika kedua ruas pada persamaan (2.14) diturunkan terhadap q hingga m kali, maka diperoleh sebagai berikut
ℒ1[um(t)mum1(t)] = h1 , ( , )
1 1 1m um vm
R ℒ2 [vm(t)mvm1(t)] = h2 , ( , ),
1 1 2m um vm
R (2.15)
) , (
,
1 1 1m um vm
R = 0
1 1
1
1 1
m q
m
q
q t q t A m
)] , ( ), , ( [ )!
(
) , (
,
1 1 2m um vm
R = 0
1 2
1
1 1
m q
m
q
q t q t A m
)] , ( ), , ( [ )!
(
(2.16)
um 1(t)(u0(t),u1(t),..., um(t))
vm1(t)(v0(t),v1(t),..., vm(t))
. ,
,
1 1
1 0
m m
m
(2.17)
Jadi berdasarkan metode homotopi diperoleh penyelesaian pendekatan sistem persamaan (2.11) sebagai berikut
1 0
m
m t
u t
u t
u( ) ( ) ( )
( ) ( )
( ),
1 0
m
m t
v t
v t v
dengan um(t), vm(t), m1,2,...diperoleh dari persamaan (2.15) dan u0(t) dan v0(t) merupakan pendekatan awal yang diberikan.
2.3 Metode Homotopi Pade'
Metode homotopi Pade' merupakan pengembangan dari metode homotopi. Dalam hal ini penyelesaian masalah taklinear dinyatakan dalam bentuk
n
k
k k m
k
k k
n m
t q
t p t
R
0 0
) (
, ,
dengan pk dan qk ditentukan berdasarkan penyelesaian dalam metode homotopi, dan m, n masing–masing suku yang digunakan.
Secara singkat penggunaan metode homotopi Pade' untuk menyelesaikan suatu masalah taklinear adalah
. ) ( )
(
0 m
m t
x t
x
2. Metode homotopi Pade' untuk masalah taklinear tersebut dilakukan dengan langkah–langkah berikut :
a. Membentuk persamaan berikut x(t).qn(t) pm(t) 0,
dengan x(t) penyelesaian yang diperoleh dari penyelesaian metode homotopi.
b. Menentukan nilai pk dan qk dari langkah (a).
c. Menggunakan pk dan qk yang telah diperoleh pada (b) ke dalam penyelesaian Rm,n(t)yang merupakan penyelesaian masalah taklinear dengan metode homotopi Pade'.
2.4 Perluasan Metode Homotopi Pade'
Pada bagian ini dibahas perluasan dari metode homotopi Pade' yang diterapkan dalam masalah model Lotka–Volterra dan Lotka–Volterra logistik. Adapun penyelesaian masalah pada model Lotka–Volterra dan Lotka–Volterra logistik berdasarkan moetode homotopi Pade' dinyatakan dalam bentuk
, )
(
,
n
k
k k m
k
k k
n m
t q
t p t
R
0 0
dengan pk dan qk ditentukan berdasarkan penyelesaian dalam metode homotopi, dan m, n masing–masing suku yang digunakan.
Secara singkat penggunaan metode homotopi Pade' untuk menyelesaikan suatu masalah pada model Lotka–Volterra dan Lotka–Volterra logistik adalah 1. Masalah pada model Lotka–Volterra dan Lotka–Volterra logistik diselesaikan
0 m
m t
u t
u( ) ( ) dan
0 m
m t
v t
v( ) ( )
2. Metode homotopi Pade' untuk masalah pada model Lotka–Volterra dan Lotka–Volterra logistik tersebut dilakukan dengan langkah–langkah berikut : a. Membentuk persamaan berikut
u(t).qn(t) pm(t) 0 dan v(t).qn(t) pm(t)0,
dengan u(t) dan v(t) merupakan penyelesaian yang diperoleh dari penyelesaian metode homotopi.
b. Menentukan nilai pk dan qk dari langkah (a).
c. Menggunakan pk dan qk yang telah diperoleh pada (b) ke dalam penyelesaian Rm,n(t) yang merupakan penyelesaian masalah pada model Lotka–Volterra dan Lotka–Volterra logistik menggunakan metode homotopi Pade'.
2.5 Contoh Masalah
Untuk lebih memahami kedua metode yang telah dibahas di atas
,
misalkan diberikan suatu masalah nilai awal berikuty x dt
dx
, y x dt
dy
4 (2.18)
dengan syarat awal x(0)n1dan y(0)n2. Penyelesaian eksak masalah nilai awal persamaan (2.18) adalah
) (
) (
) (
) (
t t
t
t t
t
e n n e n n e
t y
e n n e n n e t
x
4 2 2 4 1 1
4 2 2 4 1 1
2 2 2
1
2 2 4 1
Berikut ini akan dicari penyelesaian masalah nilai awal (2.18) dengan menggunakan metode homotopi dan metode homotopi Pade'. Misalkan didefinisikan operator berikut
ℒ1 [(t,q)]
t q t ( , )
ℒ2 [(t,q)]
t q t ( , ) ) , ( ) , ( ) , ( )] , ( ), , (
[ t q t q
t q t q t q t
A
1 ) , ( ) , ( ) , ( )] , ( ), , (
[ t q t q
t q t q t q t
A
4
2
dengan q merupakan suatu parameter, (t,q) dan (t,q)adalah suatu fungsi yang bergantung pada t dan q. Penyelesaian masalah nilai awal persamaan (2.18) dengan metode homotopi dinyatakan dalam persamaan berikut
1 0 m m t x t x tx( ) ( ) ( )
, ) ( ) ( ) (
1 0 m m t y t y t ydengan xm(t)dan ym(t), m1,2,3... yang akan ditentukan.
Jika kedua ruas pada persamaan (2.8) diintegralkan dan persamaan (2.9) digunakan, maka diperoleh persamaan berikut
ds q q s q s A m h t x t x t q m m m m m
0 0 1 1 1 1 1 11 [ ( , ), ( , )]
)! ( ) ( ) ( , )] , ( ), , ( [ )! ( ) ( ) (
t q m m m m m ds q q s q s A m h t y t y 0 0 1 2 1 2 1 11
(2.20)
dengan m diberikan pada persamaan (2.10).
Misalkan penyelesaian pendekatan awal x0(t)n1t dan ,
)
(t n t
y0 2 maka untuk m1 dan berdasarkan persamaan (2.20) diperoleh
] ) [( ) ( 2 2 1 1
1 t h 1 n n t t
x
] )
[( )
( 2 1 2 2
1
2 5 4
1 n n t t
h t
dan untuk m2, diperoleh 3 2 3 1 1 3 2 2 1 2 1 2 1 2 2 1 1 2 t t n n t n n h t t n n h t
x ( ) [( ) ] ( )
1 2 2 3
2 1 6 5 2 4 1 t t n n h h
1 2 2 3
2 1 2 2 2 2 1 2 2 6 5 2 4 6 4 1 2 5 4
1 n n t t h n n t n n t t
h t
y ( ) [( ) ] ( )
1 2 2 3
2 1 6 5 2 1
4hh n n t t
Jika proses dilanjutkan, maka diperoleh penyelesaian x3(t),x4(t),x5(t),... dan
),... ( ), ( ),
(t y t y t
y3 4 5 Jika dipilih h1 h2 1, maka penyelesaian masalah nilai
awal (2.18) berdasarkan metode homotopi adalah
( ) 1( 1 2) ( 1 2) 2 3 ...
6 7 2
5n n t t
t n n n t x ... ) ( ) ( )
( 2 1 2 1 2 2 3
6 13 5
8 10
4n n t n n t t
n t
y (2.21)
Penurunan persamaan (2.21) dapat dilihat pada Lampiran 2. Selanjutnya, penyelesaian masalah nilai awal (2.18) dengan menggunakan metode homotopi Pade' berbentuk
2 0 2 0 k k k k k k t q t p tx( ) dan ( ) .
2 0 2 0 k k k k k k t q t p t yNilai-nilai pk,qk,pk*,qk* masing–masing sampai suku keempat diperoleh dengan
bantuan software Mathematica dapat dilihat pada Lampiran 3.
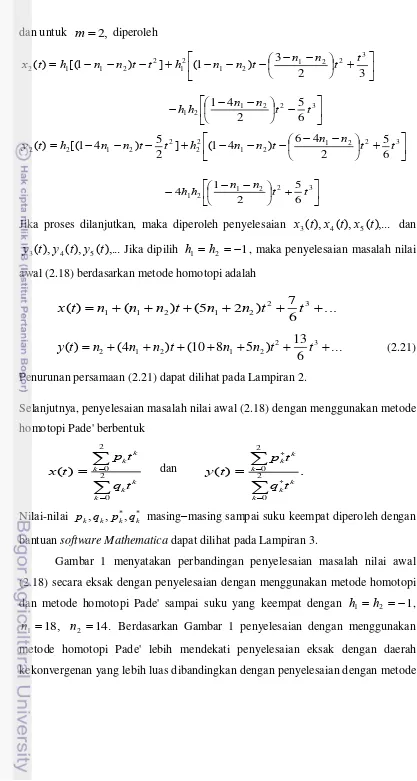
Gambar 1 menyatakan perbandingan penyelesaian masalah nilai awal (2.18) secara eksak dengan penyelesaian dengan menggunakan metode homotopi dan metode homotopi Pade' sampai suku yang keempat dengan h1 h2 1,
,
18
1
n n2 14. Berdasarkan Gambar 1 penyelesaian dengan menggunakan
homotopi, dalam hal ini yang berarti bahwa hampiran dari penyelesaian metode homotopi Pade' mendekati atau hampir sama dengan penyelesaian numerik untuk daerah atau selang yang luas. Dalam tulisan ini, yang dimaksudkan dengan daerah kekonvergenan adalah daerah pada daerah asal fungsi hampiran (penyelesaian dengan metode homotopi Pade') yang memiliki galat yang hampir sama dengan nol.
Gambar 1 Penyelesaian masalah nilai awal (2.18).
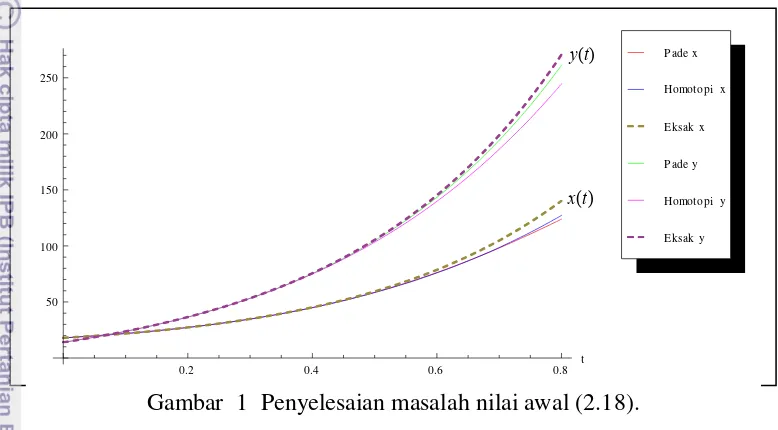
Pada Gambar 2 terlihat galat antara penyelesaian eksak, penyelesaian metode homotopi dan metode homotopi Pade'. Dalam Gambar 2 diperoleh bahwa dengan metode homotopi Pade' membentuk daerah kekonvergenan yang lebih luas dibandingkan dengan metode homotopi, hal ini terlihat pada galat yang muncul.
0.2 0.4 0.6 0.8 t
50 100 150 200 250
Eksak y Homotopi y P ade y Eksak x Homotopi x P ade x
) (t y
Gambar 2 Galat penyelesaian masalah nilai awal (2.18).
2.6 Model Matematika
Pada bagian ini akan dibahas model matematika untuk menjelaskan interaksi antara dua spesies yang berbeda, satu spesies disebut mangsa (Prey) dan spesies lainnya disebut pemangsa (Predator) berdasarkan pada Haberman (2003).
2.6.1 Model Lotka–Volterra
Model Lotka–Volterra merupakan model yang memperhitungkan interaksi spesies pada sebuah lingkungan. Interaksi spesies tersebut memiliki peranan penting pada pertumbuhan populasi yang berubah secara dinamik seiring dengan perubahan populasi yang ada.
Model ini ditemukan oleh Volterra pada tahun 1926, setelah mengamati penurunan dan kenaikan banyaknya ikan–ikan di Laut Adriatic yang terjadi secara berkala. Saat terjadi penurunan banyaknya ikan, nelayan di daerah tersebut sangat dirugikan. Model tersebut juga dikenal sebagai model Lotka–Volterra, karena Lotka juga menemukan model yang sama di waktu yang relatif bersamaan.
Model Lotka–Volterra adalah model antara populasi pemangsa dan populasi mangsa pada sebuah lingkungan yang bergantung satu sama lain berdasarkan hubungan interaksi antara kedua spesies. Misalkan x(t) dan y(t)
0.1 0.2 0.3 0.4 0.5 0.6
t
0.5 1.0 1.5
galat
Galat X
P ade Homotopi
0.1 0.2 0.3 0.4 0.5 0.6
t
0.5 1.0 1.5 2.0 2.5
galat
Galat Y
masing–masing menunjukan banyaknya spesies mangsa dan pemangsa pada waktu (t). Jika mangsa dan pemangsa tidak saling berinteraksi, maka model pertumbuhan populasi mangsa adalah
). (t ax dt
dx
Dalam hal ini a menunjukkan laju kelahiran dari populasi mangsa. Jika populasi mangsa berkurang, maka akan mengakibatkan populasi pemangsa berkurang. Hal ini dikarenakan mangsa merupakan sumber makanan untuk pemangsa. Jadi laju pertumbuhan populasi pemangsa bergantung pada banyaknya populasi mangsa, yaitu
), (t ey dt
dy
dengan e menunjukkan laju kematian dari populasi pemangsa. Hal ini disebabkan karena spesies pemangsa bergantung pada mangsa dan akan berkurang jumlahnya. Selanjutnya, jika kedua spesies tersebut saling berinteraksi dan populasi pemangsa bergantung pada populasi mangsa sebagai sumber makanan, maka model yang
diungkapkan oleh Lotka–Volterra adalah
). ( ) ( )
(
) ( ) ( ) (
t y t f x t
ey dt
dy
t y t cx t
ax dt dx
(2.22)
Parameter a, c, e, f menunjukkan interaksi antara kedua spesies tersebut, dengan a menunjukkan laju kelahiran dari populasi mangsa, c menunjukkan tingkat interaksi antara mangsa dan pemangsa yang berpengaruh terhadap mangsa atau menunjukkan adanya predasi yang mengakibatkan berkurangnya mangsa, e menunjukkan laju kematian dari populasi pemangsa dan bergantung pada mangsa dan kematian alami yang mengakibatkan berkurangnya pemangsa, f menunjukkan tingkat interaksi antara mangsa dan pemangsa yang berpengaruh pada pemangsa.
Pada bagian ini akan dibahas kestabilan titik tetap pada model Lotka– Volterra. Perhatikan model Lotka–Volterra yang telah diberikan pada persamaan (2.22) sebagai berikut
.
f xy ey
dt dy
cxy ax
dt dx
Titik tetap pada model Lotka–Volterra di atas diperoleh berdasarkan sistem persamaan berikut
. ) (
) (
0 0
fx e y
cy a x
Penyelesaian persamaan di atas memberikan titik tetap T1(0,0) dan ( , )
c a f e
T2 .
Dengan melinearkan model Lotka–Volterra di atas, akan diperoleh matriks Jacobi sebagai berikut
f x e f y
cx cy
a
J .
Matriks Jacobi untuk titik tetap pertama T1(0,0)adalah
e a JT
0 0
1
.
Nilai eigen matriks Jacobi tersebut adalah 1 a dan 2 e. Karena kedua nilai eigen yang diperoleh berbeda tanda, maka titik tetap T1(0,0)bersifat sadel.
Jadi sistem tidak stabil pada titik tetap tersebut. Matriks Jacobi untuk titik tetap kedua ( , )
c a f e
T2 adalah
0 0
2
c af
f ce
JT
.
Nilai eigen matriks Jacobi tersebut adalah 1,2 i ae. Karena kedua nilai eigen berbentuk imajiner, maka titik tetap ( , )
c a f e
T2 bersifat center. Jadi sistem stabil pada titik tetap tersebut.
. . .
.
xy y
y
xy x
x
1 0 5 0
1 0
(2.23)
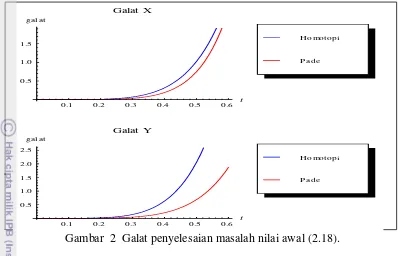
dengan syarat awal x(0)7, y(0)5. Dalam hal ini dipilih parameter a1, ,
.1 0
c e0.5, f 0.1.
[image:30.595.110.496.73.616.2]Dengan menggunakan software Mathematica diperoleh bidang phase untuk masalah nilai awal (2.23) yang ditunjukkan pada Gambar 3. Berdasarkan Gambar 3 diperoleh bahwa pada titik tetap T1 sistem tidak stabil, sedangkan pada titik tetap T2 sistem stabil.
Gambar 3 Bidang phase masalah nilai awal (2.23).
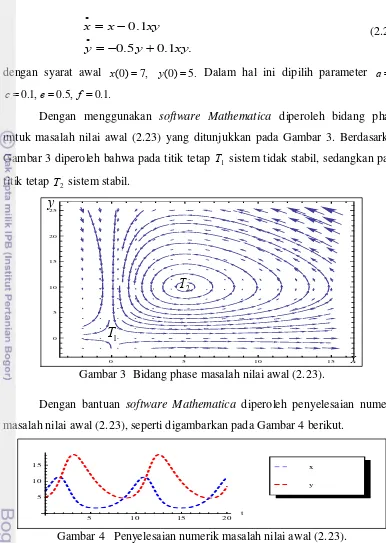
Dengan bantuan software Mathematica diperoleh penyelesaian numerik masalah nilai awal (2.23), seperti digambarkan pada Gambar 4 berikut.
Gambar 4 Penyelesaian numerik masalah nilai awal (2.23).
2.6.3 Model Lotka–Volterra Logistik
Model Lotka–Volterra logistik dibentuk berdasarkan pada model Lotka– Volterra tetapi diberikan asumsi bahwa sumber makanan untuk mangsa yang terbatas, sehingga mempengaruhi laju pertumbuhan logistik pada mangsa. Jika sumber makanan terbatas, maka mengakibatkan interaksi antar spesies mangsa
0 5 1 0 1 5
0 5 1 0 1 5 2 0 2 5
5 1 0 1 5 2 0
t 5
1 0 1 5
y x 1
T
2
T
y
untuk mendapatkan makanan, sehingga spesies mangsa berkurang. Jadi laju pertumbuhan logistik untuk populasi mangsa adalah
). (t bx dt
dx 2
Jika laju pertumbuhan logistik mangsa mempengaruhi model Lotka–Volterra pada persamaan (2.22) dan terjadi interaksi antara mangsa dan pemangsa, maka model Lotka–Volterra logistik adalah
). ( ) ( )
(
) ( ) ( ) ( )
(
t y t f x t
ey dt
dy
t y t cx t
bx t
ax dt dx
2
(2.24)
Parameter a, b, c, e, f menunjukkan interaksi antara kedua spesies tersebut, dengan a menunjukkan laju kelahiran dari populasi mangsa, b menunjukkan tingkat interaksi antar spesies mangsa untuk mendapatkan makanan, c menunjukkan tingkat interaksi antara mangsa dan pemangsa yang berpengaruh terhadap mangsa atau menunjukkan adanya predasi yang mengakibatkan berkurangnya mangsa, e menunjukkan laju kematian dari populasi pemangsa karena bergantung pada mangsa dan kematian alami yang mengakibatkan berkurangnya pemangsa, f menunjukkan tingkat interaksi antara mangsa dan pemangsa yang berpengaruh pada pemangsa.
2.6.4 Analisis Model Lotka–Volterra Logistik
Pada bagian ini akan dibahas kestabilan titik tetap pada model Lotka– Volterra logistik. Perhatikan model Lotka–Volterra logistik yang telah diberikan pada persamaan (2.24) sebagai berikut
. f xy ey
dt dy
cxy bx
ax dt dx
2
Titik tetap pada model Lotka–Volterra logistik pada persamaan (2.24) diperoleh berdasarkan sistem persamaan berikut
. ) (
) (
0 0
fx e y
Penyelesaian persamaan di atas memberikan titik tetap T1(0,0), 2( ,0)
b a
T dan
) ,
(
cf be c a f e
T3 . Dengan melinearkan model Lotka–Volterra logistik di atas, akan
diperoleh matriks Jacobi sebagai berikut
f x e f y
cx cy
bx a
J 2 .
Matriks Jacobi untuk titik tetap pertama T1(0,0)adalah
e a JT
0 0
1 .
Nilai eigen matriks Jacobi tersebut adalah 1 a dan 2 e. Karena kedua nilai eigen berbeda tanda, maka titik tetap T1(0,0) bersifat sadel. Jadi sistem
tidak stabil pada titik tetap tersebut.
Matriks Jacobi untuk titik tetap kedua 2( ,0)
b a
T adalah
b af e
b ac a
JT
0
2
.
Nilai eigen matriks Jacobi tersebut adalah 1 a dan
b af
e
2
. Ini
berarti, jika af be negatif, maka nilai eigen 2( ,0)
b a
T keduanya bernilai
negatif, sehingga titik tetap 2( ,0)
b a
T bersifat stabil. Jika af be positif, (1
negatif dan 2 positif), maka titik tetap 2( ,0)
b a
T bersifat sadel.
Matriks Jacobi untuk titik tetap ketiga ( , )
cf be c a f e
T3 adalah
0 1
3
) (af be c
f ce f
be
JT .
Jadi jika af benegatif maka 1 positif dan 2 negatif. Hal ini
mengakibatkan titik tetap ( , )
cf be c a f e
T3 bersifat sadel, dan jika af be positif maka 1 dan 2bernilai negatif, sehingga titik tetap ( , )
cf be c a f e
Selanjutnya, tinjau masalah nilai awal berikut
. . .
. .
xy y
y
xy x
x x
1 0 5 0
1 0 1
0
2 2
(2.25)
dengan syarat awal x(0)10, y(0)5. Dalam hal ini dipilih parameter
,
2
a b0.1,c0.1, e0.5, f 0.1.
[image:33.595.112.504.54.540.2]Dengan menggunakan software Mathematica diperoleh bidang phase untuk masalah nilai awal (2.25) yang ditunjukkan pada Gambar 5. Berdasarkan Gambar 5 diperoleh bahwa pada titik tetap T1 sistem tidak stabil, T2 bersifat stabil untuk af be negatif dan bersifat tidak stabil untuk af bepositif, sedangkan
3
T bernilai negatif .
Gambar 5 Bidang phase masalah nilai awal (2.25).
Dengan bantuan software Mathematica diperoleh penyelesaian numerik masalah nilai awal (2.25), seperti digambarkan pada Gambar 6 berikut.
Gambar 6 Penyelesaian numerik masalah nilai awal (2.25).
0 5 1 0 1 5
0 5 1 0 1 5 2 0 2 5 3 0
5 10 15 20 t
5 10 15
y x
1
T
x
2
III HASIL DAN PEMBAHASAN
Pada bagian ini akan dibahas penggunaan metode homotopi dan metode homotopi Pade' untuk menyelesaikan masalah pada model Lotka–Volterra dan model Lotka–Volterra dengan logistik.
3.1 Model Lotka–Volterra
Perhatikan model Lotka–Volterra berikut ini
), ( ) ( ) (
) ( ) ( ) (
t y t f x t
ey dt
dy
t y t cx t ax dt dx
(3.1)
syarat awal x(0)n1 dan y(0)n2, dengan n1 dan n2 masing–masing banyaknya mangsa dan pemangsa pada saat awal. Karena model Lotka–Volterra merupakan masalah taklinear dan tidak dapat diselesaikan secara eksak, maka berikut ini akan dicari penyelesaian masalah nilai awal (3.1) dengan menggunakan metode homotopi dan metode homotopi Pade
'
.Misalkan didefinisikan operator sebagai berikut : ℒ1
t q t q
t
( , )
)] , (
[
ℒ2
t q t q
t
( , )
)] , (
[
[ ( , ), ( , )] ( , ) a (t,q) c (t,q) (t,q) t
q t q
t q t
A
1
[ ( , ), ( , )] ( , ) e (t,q) f (t,q) (t,q), t
q t q
t q t
A
2
Penyelesaian masalah nilai awal persamaan (3.1) dengan metode homotopi dinyatakan dalam persamaan berikut
1 0 m m t x t x tx( ) ( ) ( ) dan ( ) ( )
( ), 1 0 m m t y t y t y dengan xm(t) dan ym(t), m1,2,3... yang akan ditentukan. Jika kedua ruas
pada persamaan (2.15) diintegralkan dan persamaan (2.16) digunakan, maka diperoleh persamaan berikut
ds q q s q s A m h t x t x t q m m m m m
0 0 1 1 1 1 1 11 [ ( , ), ( , )]
)! ( ) ( ) ( , )] , ( ), , ( [ )! ( ) ( ) (
t q m m m m m ds q q s q s A m h t y t y 0 0 1 2 1 2 1 11
(3.2)
dengan m diberikan pada persamaan (2.17).
Misalkan penyelesaian pendekatan awal x0(t)n1t dan ,
)
(t n t
y0 2 maka untuk m1 dan berdasarkan persamaan (3.2) diperoleh
] ) ) ( ( ) [( )
( 1 1 1 2 1 2 2 3
1 6 6 6 3 3 2
6 an cnn t c n n a t ct
h t
x
]. )) ( ( ) [( )
( 2 2 1 2 1 2 2 3
1 6 6 6 3 3 2
6 en f nn t e f n n t f t
h t
y (3.3)
Untuk m2, diperoleh
3 6 2 5 1 1 2 4 2 3 1 2 1 1 1 1 2 2 6 2
1 h t h h h t h c h h t
h t
x ( )[ ( )] [ ( )] [ ( )]
5 9 1 4 8 2 7 1 1 15 24 t h t h h h ] [ )] ( [ 3 6 1 5 2 2 2 4 1 3 2 2 2 2 1 2 2 2 6 2
1 h t h h h t h h h f t
h t
y ( )[ ( )] [ ( )] [ ( )]
5 9 2 4 8 1 7 2 2 15 24 t h t h h h ] [ )] ( [ (3.4) dengan 2 1 1
1 1an cnn
a cn cn
1 2
2
)] (
[ 2 2 2
1 2
3 2cn 2an ca cn 2a2cn
)] (
[ 2 1
1
4 cn 1n e fn
) (
)
(a cn cn cn a
cn a
c 3 2
4 1 2 2 2
2
5
)] (
[ 12 2 1 2
6 c 2 fn 2en n e3fn
ac n
n
c2 3 1 5 2 5
7 ( )
)
( 1 2
8 c 3e5fn 3fn
2 1 2
9 c h cfh
2 1 2
1 1en fn n
2 1 2 e fn fn
2 2 1 2 2 1
2 2
3 2en (e f)2n(f efn ) f nn
)
( 1 1 2 1
2
4 fn an cnn
2 1 2 2
1 2 2
5 e 4f 3efn fn(3fn 2e) f n
)] (
[ 2 22 1 2
6 f an 2cn n 2a3cn
ef n f n
f 3 5
5 2 1 2 2
7
)
( 1 2
8 f 3a3cn 5cn
1 2 2
9 f h cfh
Penurunan lengkap dapat dilihat pada Lampiran 4.
Jika proses dilanjutkan, maka diperoleh penyelesaian x3(t),x4(t),x5(t),...
dan y3(t),y4(t),y5(t),...Jadi berdasarkan metode homotopi diperoleh
penyelesaian pendekatan masalah taklinear persamaan (3.1) sebagai berikut
1 0
m
m t
x t
x t
x( ) ( ) ( )
( ) ( )
( ),
1 0
m
m t
y t
y t
y (3.5)
3.1.1 Kasus Pertama Model Lotka–Volterra
Berikut ini diberikan kasus untuk penyelesaian masalah pada model Lotka–Volterra yang diberikan pada persamaan (3.1). Dalam kasus ini terdapat interaksi dua spesies antara spesies mangsa dan spesies pemangsa. Misalkan pada kondisi awal banyaknya mangsa n1 7 dan banyaknya pemangsa n2 5 dan dipilih laju kelahiran mangsa a1, tingkat interaksi antara mangsa dan pemangsa yang mengakibatkan berkurangnya mangsa c0.1, laju kematian pemangsa
5 0.
e dan tingkat interaksi antara pamangsa dan mangsa yang mengakibatkan bertambahnya pemangsa f 0.1. Interpretasi fisis pada kasus ini adalah laju kelahiran mangsa sebesar satu unit per hari dan laju kematian pemangsa sebesar satu unit per dua hari, tingkat interaksi antara mangsa dan pemangsa yang mengakibatkan berkurangnya mangsa dalam sepuluh hari kemungkinan mangsa akan dimangsa sebesar satu unit dan tingkat interaksi antara pemangsa dan mangsa yang mengakibatkan pemangsa akan bertambah dalam sepuluh hari sebesar satu unit.
Penyelesaian persamaan (3.1) kasus pertama dengan menggunakan metode homotopi sampai suku yang keempat diperoleh dalam bentuk
) ( )
( ) ( ) ( ) ( )
(t x t x t x t x t x t
x 0 1 2 3 4
), ( )
( )
( )
( ) ( )
(t y t y t y t y t y t
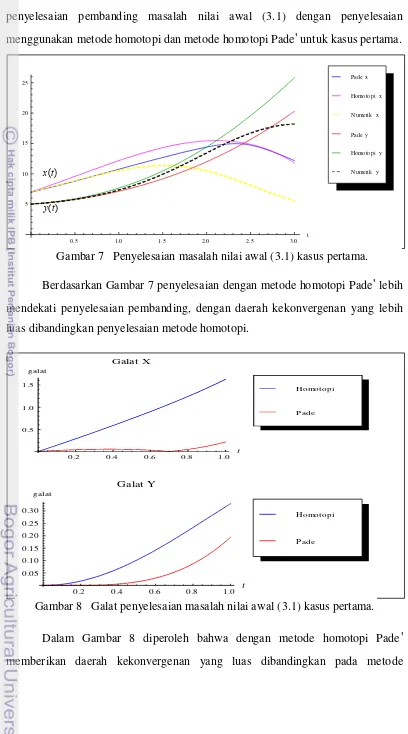
y 0 1 2 3 4 (3.6)
dengan x0(t) n1 t, y0(t) n2 t, dan xi(t),yi(t),i 1,2,3,4 dihitung dengan bantuan software Mathematica dan diberikan pada Lampiran 5. Grafik penyelesaian persamaan (3.1) untuk kasus pertama dengan menggunakan metode homotopi dapat dilihat pada Gambar 7. Berdasarkan penyelesaian x(t)
dan y(t) pada persamaan (3.6), maka penyelesaian dengan menggunakan metode homotopi Pade
'
dari persamaan (3.5) dengan koefisien pk dan qkpenyelesaian pembanding masalah nilai awal (3.1) dengan penyelesaian menggunakan metode homotopi dan metode homotopi Pade
'
untuk kasus pertama. [image:38.595.107.515.77.811.2]Gambar 7 Penyelesaian masalah nilai awal (3.1) kasus pertama. Berdasarkan Gambar 7 penyelesaian dengan metode homotopi Pade
'
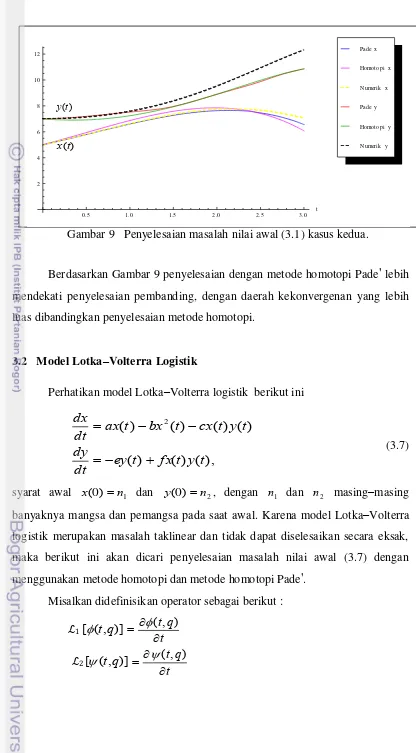
lebih mendekati penyelesaian pembanding, dengan daerah kekonvergenan yang lebih luas dibandingkan penyelesaian metode homotopi.Gambar 8 Galat penyelesaian masalah nilai awal (3.1) kasus pertama. Dalam Gambar 8 diperoleh bahwa dengan metode homotopi Pade
'
memberikan daerah kekonvergenan yang luas dibandingkan pada metode0.5 1.0 1.5 2.0 2.5 3.0
t 5
10 15 20 25
Numerik y Homotopi y P ade y Numerik x Homotopi x P ade x
0.2 0.4 0.6 0.8 1.0
t
0.5 1.0 1.5
galat
Galat X
P ade Homotopi
0.2 0.4 0.6 0.8 1.0 t 0.05
0.10 0.15 0.20 0.25 0.30
galat
Galat Y
P ade Homotopi
) (t x
homotopi. Hal ini terlihat pada galat yang muncul, dimana galat pada metode homotopi Pade
'
lebih kecil dibandingkan galat pada metode homotopi.3.1.2 Kasus Kedua Model Lotka–Volterra
Dalam kasus ini terdapat interaksi dua spesies antara spesies mangsa dan spesies pemangsa. Misalkan pada kondisi awal banyaknya mangsa n1 5 dan banyaknya pemangsa n2 7 dan dipilih laju kelahiran mangsa a1, tingkat
interaksi antara mangsa dan pemangsa yang mengakibatkan berkurangnya mangsa 1
0.
c , laju kematian pemangsa e0.5 dan tingkat interaksi antara pamangsa dan mangsa yang mengakibatkan bertambahnya pemangsa f 0.1.
Penyelesaian persamaan (3.1) kasus kedua dengan menggunakan metode homotopi sampai suku yang keempat diperoleh dalam bentuk
) ( )
( ) ( ) ( ) ( )
(t x t x t x t x t x t
x 0 1 2 3 4
), ( )
( )
( )
( ) ( )
(t y t y t y t y t y t
y 0 1 2 3 4
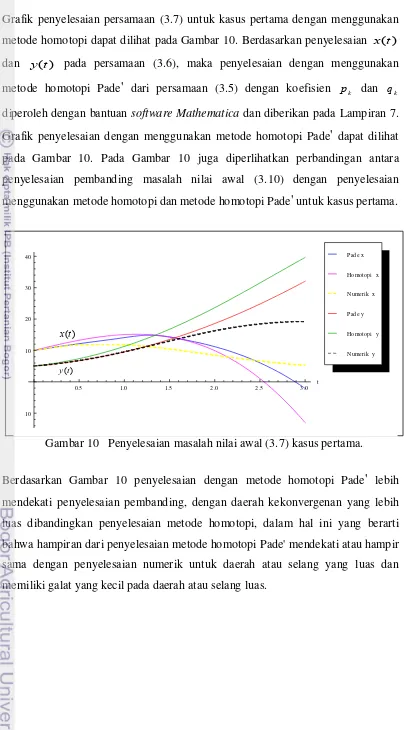
dengan x0(t) n1 t, y0(t) n2 t, dan xi(t),yi(t),i 1,2,3,4 dihitung dengan bantuan software Mathematica dan diberikan pada Lampiran 5. Grafik penyelesaian persamaan (3.1) untuk kasus pertama dengan menggunakan metode homotopi dapat dilihat pada Gambar 9. Berdasarkan penyelesaian x(t)
Gambar 9 Penyelesaian masalah nilai awal (3.1) kasus kedua.
Berdasarkan Gambar 9 penyelesaian dengan metode homotopi Pade
'
lebih mendekati penyelesaian pembanding, dengan daerah kekonvergenan yang lebih luas dibandingkan penyelesaian metode homotopi.3.2 Model Lotka–Volterra Logistik
Perhatikan model Lotka–Volterra logistik berikut ini
), ( ) ( )
(
) ( ) ( ) ( )
(
t y t f x t
ey dt
dy
t y t cx t
bx t
ax dt dx
2
(3.7)
syarat awal x(0)n1 dan y(0)n2, dengan n1 dan n2 masing–masing banyaknya mangsa dan pemangsa pada saat awal. Karena model Lotka–Volterra logistik merupakan masalah taklinear dan tidak dapat diselesaikan secara eksak, maka berikut ini akan dicari penyelesaian masalah nilai awal (3.7) dengan
menggunakan metode homotopi dan metode homotopi Pade
'
. Misalkan didefinisikan operator sebagai berikut :ℒ1 [(t,q)]
t q t
( , )
ℒ2[(t,q)]
t q t
( , )
0.5 1.0 1.5 2.0 2.5 3.0 t
2 4 6 8 10 12
Numerik y Homotopi y P ade y Numerik x Homotopi x P ade x
) (t y
[ ( , ), ( , )] ( , ) a (t,q) b (t,q) (t,q) c (t,q) (t,q) t q t q t q t
A
1
[ ( , ), ( , )] ( , ) e (t,q) f (t,q) (t,q), t q t q t q t
A
2
dengan q merupakan suatu parameter, (t,q) dan (t,q)adalah suatu fungsi yang bergantung pada t dan q. Penyelesaian masalah nilai awal persamaan (3.7) dengan metode homotopi dinyatakan dalam persamaan berikut
1 0 m m t x t x tx( ) ( ) ( )
, ) ( ) ( ) (
1 0 m m t y t y t y dengan xm(t) dan ym(t), m1,2,3... yang akan ditentukan.Jika kedua ruas pada persamaan (2.15) diintegralkan dan persamaan (2.16) digunakan, maka diperoleh persamaan berikut
ds q q s q s A m h t x t x t q m m m m m
0 0 1 1 1 1 1 11 [ ( , ), ( , )]
)! ( ) ( ) ( , )] , ( ), , ( [ )! ( ) ( ) (
t q m m m m m ds q q s q s A m h t y t y 0 0 1 2 1 2 1 11
(3.8)
dengan m diberikan pada persamaan (2.17). Jika dimisalkan penyelesaian pendekatan awal x0(t)n1t dan y0(t)n2t, maka untuk m1 dan berdasarkan persamaan (3.8) diperoleh
] ) ( ) ) ( ( ) [( )
( 1 1 12 1 2 1 2 1 2 3
1 6 6 6 6 3 6 3 2
6 an bn cnn t c n n bn a t b c t
h t
x
]. )) ( ( ) [( )
( 2 2 1 2 1 2 2 3
1 6 6 6 3 3 2
6 en f nn t e f n n t f t
h t
y (3.9)
Untuk m2, diperoleh
3 6 2 5 1 1 2 4 2 3 1 2 1 1 1 1 2 2 6 2
1 h t h h h t h b c h h t
h t
x ( )[ ( )] [ ( )] [ ( ( ) )]
3 6 1 5 2 2 2 4 1 3 2 2 2 2 1 2 2 2 6 2
1 h t h h h t h h h f t
h t
y ( )[ ( )] [ ( )] [ ( )]
5 9 2 4 8 1 7 2 2 15 24 t h t h h h ] [ )] ( [ (3.10) dengan 2 1 2 1 1
1 1an bn cn n
a bn n
n
c
1 2 1
2 ( ) 2