APLIKASI SENSOR ULTRASONIK UNTUK MENDETEKSI HALANGAN PADA TONGKAT TUNANETRA
TUGAS AKHIR
Dara Elsya Iswara NIM : 112411036
DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
UNIVERSITAS SUMATERA UTARA
MEDAN
2014
APLIKASI SENSOR ULTRASONIK UNTUK MENDETEKSI HALANGAN PADA TONGKAT TUNANETRA
TUGAS AKHIR
Diajukan Untuk Melengkapi dan Memenuhi Syarat Mencapai Gelar Ahlimadya
DARA ELSYA ISWARA NIM : 112411036
DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
UNIVERSITAS SUMATERA UTARA
MEDAN
2014
PERSETUJUAN
Judul : APLIKASI SENSOR ULTRASONIK UNTUK
MENDETEKSI HALANGAN PADA TONGKAT TUNANETRA
Kategori : D-III
Nama : Dara Elsya Iswara
NIM : 112411036
Program Studi : Metrologi dan Instrmentasi Departemen : Fisika
Fakultas : Matematika dan Ilmu Pengetahuan Alam (MIPA) Universitas
Sumatera Utara
Diluluskan di Medan,
Komisi Pembimbing :
Diketahui/Disetujui oleh
Ketua Departemen Fisika FMIPA USU Pembimbing,
(Drs. Achiruddin M,sc)
NIP .19540604 1983033 1 003
PENGHARGAAN
Alhamdulillah segala puji bagi Allah SWT yang telah memberikan rahmat dan hidayahnya sehingga penulis berhasil menyelesaikan tugas akhir yang berjudul “Aplikasi Sensor Ultrasonic Untuk Mendeteksi Halangan pada Tingkat Tunanetra” ini tepat pada waktunya. Shalawat dan salam semoga selalu dilimpahkan kepada junjungan Nabi Muhammad SAW, keluarga sahabat dan para pengikut sampai akhir zaman.
Tugas akhir ini disusun sebagai salah satu syarat untuk menyelesaikan pendidikan Diploma III Netrologi dan Instrumentasi Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Sumatera Utara. Dalam tugas akhir ini, penulis banyak mendapat masukan dan serta dukungan dari berbagai pihak.
Secara khusus penulis menyampaikan rasa terima kasih yang sedalam – dalamnya kepada Ayahanda Drs. Harunsyah, M.ap dan Ibunda Meriana yang telah mendidik dan membesarkan penulis dengan segala pengorbanan yang terhitung nilainya serta kasih sayang yang tulus. Dan selalu memberikan doa dan dukungan baik moril ataupun materil. Sehingga penulis ini tepat pada waktunya. Semoga Allah SWT membalas budi baik mereka. Amin.
Ucapan terima kasih juga penulis sampaikan kepada abang saya Hame Prayusha, kakak Azizah Noor Ridha, dan Adik Mhd. Hazrie Fajar.
Dalam kesempatan ini penulis juga ingin mengucapkan terima kasih kepada:
1. Drs. Sutarman, M.SC selaku Dekan Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Sumatera Utara.
2. Ibu Dr. Diana Alemnia Barus M. SC. Selaku Ketua Program Studi DIII Metrologi dan Instrumen FMIPA USU.
3. DR. Achiruddin, M.SC selaku Dosen Pembimbing, yang telah banyak membimbing dalam menyelesaikan tugas akhir, sehingga dapat terselesaikan denganbaik.
4. Seluruh Dosen Program Studi Diploma III Metrologi dan Instrumentasi Fakultas Matematika dan Ilmu Pengetahuan Alam
Universitas Sumatera Utara yang telah memberikan Ilmu Pengetahuannya kepada penulis selama masa perkuliahan.
5. Nerizki Cahyana, sahabat seperjuangan dan juga selama menyusun Tugas Akhit ini.
6. Septia Mega, yang telah banyak memberikan dukungan dan masukan dalam penyusunan Tugas Akhir ini.
7. Sahabat – sahabat seperjuangan penulis, Yubi, Christy, Putra, Gara, Coky, Naymah, Joko, Gatra dan Stefi. Terima kasih atas nasehat dan ilmunya selama ini. Banyak ilmu keihdupan yang dipelajari dari kalian. Terkadang kita sering berselisih tetapi kalian adalah sahabat – sahabat terbaik.
8. Teman teman Metrologi o’ii yang telah banyak memberikan ilmu kepada penulis baik dalam penyusunan tugas akhir ini maupun pada masa perkuliahan.
Pada penulisan tugas akhir ini, penulis telah berusaha semaksimal mungkin untuk mencapai kesempurnaan. Namun penulis menyadari terdapat kelemahan dan kekurangan dalam penulisan tugas akhir ini. Untuk itu saya mengharapkan kritik dan saran dari pembaca sekalian demi penyempurnaan.
Demikian tugas akhir ini saya buat, semoga tulisan ini bermanfaat bagi kita semua.
Medan, 21 Juli 2014 Penulis
Dara Elsya Iswara
DAFTAR ISI
2.3.Mikrokontroler Atmega 8535 ... 6
2.3.1. Konfigurasi PIN Atmega 8535 ... 9
2.3.2. Peta Memori Atmega 8535 ... 13
2.3.3. Status Register (SREG) ... 15
2.4.Bahasa Pemograman Mikrokontroler ... 16
2.4.1. Condension AVR ... 16
BAB III PERANCANGAN ALAT DAN PEMBUATAN SISTEM ... 19
3.1.Perancangan Blok Diagram Sistem ... 19
3.2.Perancangan Rangkaian Catu Daya ... 20
3.3.Rangkaian Mikrokontroler Atmega 8535 ... 21
3.4.Rangkaian Sensor Ultrasonic ... 22
3.5.Display LCD Character 2 x 16 ... 23
3.6.Diagram Air Program ... 26
BAB IV PENGUJIAN ALAT DAN ANALISIS RANGKAIAN ... 27
4.1.Pengujian Rangkaian Power Supply ... 27
4.2.Pengujian Rangkaian Mikrokontroler At Mega 8535 ... 27
4.2.1.Pengujian dan Analisa Rangkaian Sensor Ultrasonic ... 28
4.2.2.Pengujian Interfacing LCD 2 x 16 ... 28
4.3.Pengujian Buzzer ... 31
BAB V Kesimpulan dan Saran ... 32
5.1.Kesimpulan ... 32
5.2.Saran ... 32
DAFTAR PUSTAKA ... 33
Lampiran A ... 34
Lampiran B ... 35
ABSTRAK
Indera penglihatan adalah salah satu sumber informasi yang vital bagi manusia. Tidak berlebihan apabila dikemukakan bahwa sebagian besar informasi yang diperoleh oleh manusia berasal dari indera penglihatan, sedangkan selebihnya berasal dari panca indera yang lain. Sebagai konsekuensnya, bila seseorang mengalami gangguan pada indera penglihatan, maka kemampuan aktifitas akan sangat terbatas, karena informasi yang diperoleh akan jauh berkurang dibandingkan mereka yang berpenglihatan normal. Dengan mata manusia dapat melihat, bisa mengetahui kondisi disekitarnya, membedakan suatu obyek baik itu ukuran bentul, warna dan sebagainya. Dengan kemajuan dibidang teknologi maka dapat dibuat suatu alat yang menggunakan gelombang ultrasonik untuk mendeteksi keberadaan suatu obyek. Gelombang ultrasonik ini akan dipancarkan dan sinyal yang mengenai suatu objek sebagian akan dipantulkan kembali. Sinyal pantul akan diterima oleh suatu penerima untuk kemudian diolah oleh mikrokontroler. Mikrokontroler tersebut akan mengontrol dan mengolahnya, sehingga dapat dihasilkan suatu informasi tentang keberadaan obyek tersebut sekaligus megukur jarak antara obyek dengan alat.
Kata Kunci : IMT,VB,Mikrokontroller,ATMega8535,PC
ABSTRAK
Indera penglihatan adalah salah satu sumber informasi yang vital bagi manusia. Tidak berlebihan apabila dikemukakan bahwa sebagian besar informasi yang diperoleh oleh manusia berasal dari indera penglihatan, sedangkan selebihnya berasal dari panca indera yang lain. Sebagai konsekuensnya, bila seseorang mengalami gangguan pada indera penglihatan, maka kemampuan aktifitas akan sangat terbatas, karena informasi yang diperoleh akan jauh berkurang dibandingkan mereka yang berpenglihatan normal. Dengan mata manusia dapat melihat, bisa mengetahui kondisi disekitarnya, membedakan suatu obyek baik itu ukuran bentul, warna dan sebagainya. Dengan kemajuan dibidang teknologi maka dapat dibuat suatu alat yang menggunakan gelombang ultrasonik untuk mendeteksi keberadaan suatu obyek. Gelombang ultrasonik ini akan dipancarkan dan sinyal yang mengenai suatu objek sebagian akan dipantulkan kembali. Sinyal pantul akan diterima oleh suatu penerima untuk kemudian diolah oleh mikrokontroler. Mikrokontroler tersebut akan mengontrol dan mengolahnya, sehingga dapat dihasilkan suatu informasi tentang keberadaan obyek tersebut sekaligus megukur jarak antara obyek dengan alat.
Kata Kunci : IMT,VB,Mikrokontroller,ATMega8535,PC
BAB I
PENDAHULUAN
1.1.LATAR BELAKANG
Indera penglihatan adalah salah satu sumber informasi yang vital bagi manusia. Tidak berlebihan apabila dikemukakan bahwa sebagian besar informasi yang diperoleh oleh manusia berasal dari indera penglihatan, sedangkan selebihnya berasal dari panca indera yang lain. Sebagai konsekuensnya, bila seseorang mengalami gangguan pada indera penglihatan, maka kemampuam aktifitas akan sangat terbatas, karena informasi yang dpperoleh akan jauh berkurang dibandingkan mereka yang berpenglihatan normal. ata merupakan sensor untuk merekam keaadaan/ kondisi disekitar yang kemudian sinyal hasil rekaman ini diolah oleh otak, sehingga manusia bisa mengerti tentang apa yang dilihatnya. Akan tetapi kelelawar dapat mendeteksi obyek yang ada tanpa menggunakan mata. Kelelawar memancarkan gelombang ultrasonik dan gelombang pantul yang diterimanya diolah oleh syaraf kelelawar sehingga dia mampu mendeteksi obyek yang ada. Pada umumnya penyandang tuna netra menggunakan tongkat untuk mengetahui jarak yang ada disekitarnya,tongkat biasanya digunakan jika berjalan diluar ruangan, tetapi jika didalam ruangan tongkat tidak dipakai karena takut merusak barang-barang pecah belah. Kekurangan lain dari tongkat yaitu biasanyahanya untuk meraba benda-benda/halangan yang berada dibawah, dan halangan seperti mobil/truk sering tidak terdeteksi oleh tongkat. Penyandang tuna netra juga mengalami kendala untuk menentukan jarak obyek yang ada disekitarnya,misalnya teman yang diajak bicara,dll. Dengan kemajuan dibidang teknologi maka dapat dibuat suatu alat yang menggunakangelombang ultrasonik untuk mendeteksi keberadaan suatu obyek. Gelombang ultrasonik ini akan dipancarkan dan sinyal yang mengenai suatu objek sebagian akan dipantulkan kembali. Sinyal pantul akan diterima oleh suatu penerima untuk kemudian diolah oleh mikrokontroler.Mikrokontroler tersebut akan mengontrol dan mengolahnya, sehingga dapat dihasilkan suatu informasi tentang keberadaan obyek tersebut sekaligus megukur jarak antara obyek dengan alat.
1.2.RUMUSAN MASALAH
Berbagai uraian yang telah ada maka penelitian ini diarahkan pada permasalahan berikut:
a. Rancang bangun alat tongkat tunanetra berbasis mikrokontroler Atmega 8535
b. perancangan program c menggunakan codevision avr
1.3.BATASAN MASALAH
Mengingat keterbatasan waktu dan untuk menghindari topik yang tidak perlu maka penulis membatasi pembahasan pembuatan alat ini. Adapun permasalahan ini adalah :
1. Mengetahui bagaimana prinsif kerja dari rangkaian alat tongkat tunanetra 2. Mengetahui bagaimana fungsi dari masing- masing komponen utama yaitu
sensor ultrasonic, mikrokontroller, dan lcd serta komponen pendukung lainnya
3. Mengetahui bagaimana bahasa pemograman menggunakan codevision avr 4. Sensor ultrasonic yang dibahas hanya mengenenai hcsr-04
1.4.TUJUAN PENELITIAN
Adapun maksud dan tujuan penulis melakukan penelitian ini adalah :
1. Untuk mengembangkan fungsi sensor ultrasonik dengan cara membuat alat tongkat untuk penyandang tunanetra dalam bidang instrumentasi.
2. Untuk menambah pengetahuan penulisan dalam membuat dan menganalisa suatu hasil praktek dengan teori ketika membuat alat instrumentasi
3. Untuk mempermudah penyandang tunanetra untuk berjalan
1.5.Manfaat
Adapun Manfaat pembahasan ini adalah : 1. Mempermudah penyandang tunanetra
2. Meningkatkan efisiensi waktu secara tepat dan hasilnya akurat
BAB II
LANDASAN TEORI
2.1.Umum
Mata merupakan bagian tubuh manusia yang memegang peranan sangat penting, karena manusia mengenali apapun pertama kali melalui penglihatan. Maka tidaklah salah ketika ada yang berpendapat bahwa mata merupakan jendela dunia.Tidak semua orang memiliki mata yang sempurna yang bisa menikmati semua penciptaan di alam ini. Ada beberapa orang di dunia ini yang tidak mampu melihat karena mata tidak bisa berfungsi sebagaimana mestinya. Salah satu permasalahan mata adalah kebutaan. Ada yang mengalami kebutaan sejak kecil dan ada juga yang terjadi setelah dewasa. Berdasarkan data organisasi kesehatan dunia atau WHO, setiap lima detik ada satu orang dewasa menjadi buta. Sementara setiap satu menit ada satu anak menjadi buta. Diperkirakan belasan tahun ke depan penderita kebutaan mencapai 100 juta kasus. Pada tahun 2000 saja jumlahnya sudah mencapai 45 juta orang buta dan 135 juta orang mengalami gangguan penglihatan. (http://kompas.com: 2007)Di Indonesia, terdapat sekitar 3,5 jutA penderita kebutaan. Sebanyak ,76% disebabkan katarak, 0,20% karena glaukoma dan kelainan refraksi 0,14%. (http://kompas.com: 2007) Karena tidak mampu melihat, penderita tunanetra seringkali memerlukan bantuan orang lain dalam melakukan aktivitasnya sehari-hari, Terutama saat berjalan.
2.2.Sensor Ultrasonic
Sensor ultrasonic adalah sensor yang bekerja berdasarkan prinsip pantulan gelombang dimana sensor menghasilkan gelombang pantulan ke benda yang kemudian menangkapnya kembali dengan perbedaan waktu sebagai dasar perhitungannya.. Perbedaan waktu antara gelombang pantulan yang di kembalikan dan yang diterima kembali adalah berbanding lurus dengan jarak atau tinggi objek yang memantulkannya.. Jenis objek yang dapat di indranya adalah padat, cair dan butiran. Tanpa kontak jarak 2 cm sampai 3 meter dan dapat dengan mudah dihubungkan dengan mikrokontroler malalui satu pin I/O saja.
Dimensi : 2,6 cm (p) x 4,1 cm (l) x 6,2 cm (t)
Gambar 2.1. Sensor Ultrasonic
Spesifikasi: :
-. Memiliki 2 jenis antarmuka yang dapat aktif bersamaan, yaitu I2C-bus (fSCL maks. 65 kHz) dan pulse width (10µs/mm).
-. 8 modul dapat digunakan bersama dalam satu sistem I2C-bus yang hanya membutuhkan 2 pin I/O mikrokontroler saja.
-. Membutuhkan catu daya tunggal +5 VDC, dengan konsumsi arus 17 mA typ. (tanpa sensor infrared ranger).
cara kerja sensor ultrasonic dengan cara memantulkan gelombang ke sebuah objek kemudian data yang di pantulkan menentukan jarak dari sensor ke objek.
Gambar 2.2. Ilustrasi cara kerja sensor
2.3.Mikrokontroler Atmega8535
Mikrokontroler sesuai namanya adalah suatu alat atau komponen pengontrol atau pengendali yang berukuran mikro atau kecil. Sebelum ada mikrokontroler, telah ada terlebih dahulu muncul mikroprosesor. Bila dibandingkan dengan mikroprosesor, mikrokontroler jauh lebih unggul karena terdapat berbagai alasan, diantaranya :
a. Tersedianya I/O
I/O dalam mikrokontroler sudah tersedia sementara pada mikroprosesor dibutuhkan IC tambahan untuk menangani I/O tersebut. IC I/O yang dimaksud adalah PPI 8255. (Syahrul.2012)
b. Memori Internal
Memori merupakan media untuk menyimpan program dan data sehingga mutlak harus ada. Mikroprosesor belum memiliki memori internal sehingga memerlukan IC memori eksternal. Dengan kelebihan-kelebihan di atas, ditambah dengan harganya yang relatif murah sehingga banyak penggemar elektronika yang kemudian beralih ke mikrokontroler. Namun demikian, meski memiliki berbagai kelemahan, mikroprosesor tetap digunakan sebagai dasar dalam mempelajari mikrokontroler. Inti kerja dari keduanya adalah sama, yakni sebagai pengendali suatu sistem.
Mikrokontroler adalah otak dari suatu sistem elektronika seperti halnya mikroprosesor sebagai otak komputer. Namun mikrokontroler memiliki nilai tambah karena didalamnya sudah terdapat memori dan sistem input/output dalam suatu kemasan IC. Mikrokontroler AVR (Alf and Vegard’s RISC processor) standar memiliki arsitektur 8-bit, dimana semua instruksi dikemas dalam kode 16- bit dan sebagian besar instruksi dieksekusi dalam satu siklus clock. Berbeda dengan instruksi MCS-51 yang membutuhkan 12 siklus clock karena memiliki arsitektur CISC (seperti komputer).(Dedi.2010)
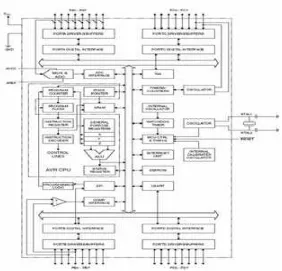
Gambar 2. 4. Blok Diagram ATMega8535
Dari gambar tersebut dapat dilihat bahwa Atmega8535 memiliki bagian sebagai berikut :
1. Saluran I/O sebanyak 32 buah, yaitu Port A, Port B, Port C, Port D. 2. ADC 10 bit sebanyak 8 saluran.
3. Tiga buah Timer/Counter dengan kemampuan pembandingan. 4. CPU yang terdiri atas 32 buah register.
5. Watchdog Timer dengan osilator internal. 6. SRAM sebesar 512 byte.
7. Memori Flash sebesar 8 kb dengan kemampuan Read While Write. 8. Unit interupsi internal dan eksternal.
9. Port antarmuka SPI.
10. EEPROM sebesar 512 byte yang dapat diprogram saat operasi. 11. Antarmuka komparator analog.
12. Port USART untuk komunikasi serial
Secara umum, AVR dapat dikelompokkan menjadi 4 kelas, yaitu keluarga ATTiny, keluarga AT90Sxx, keluarga ATMega dan AT89RFxx. Pada dasarnya
yang membedakan masing-masing kelas adalah memori, peripheral, dan fungsinya. Dari segi arsitektur dan instruksi yang digunakan, mereka bisa dikatakan hampir sama. Oleh karena itu, dipergunakan salah satu AVR produk Atmel, yaitu Atmega8535. Selain mudah didapatkan dan lebih murah Atmega8535 juga memiliki fasilitas yang lengkap. Untuk tipe AVR ada 3 jenis yaitu ATTiny, AVR klasik, dan ATMega. Perbedaannya hanya pada fasilitas dan I/O yang tersedia serta fasilitas lain seperti ADC, EEPROM, dan lain sebagainya. Salah satu contohnya adalah ATMega 8535. Memiliki teknologi RISC dengan kecepatan maksimal 16 MHz membuat ATMega 8535 lebih cepat bila dibandingkan dengan varian MCS51. Dengan fasilitas yang lengkap tersebut menjadikan Atmega8535 sebagai mikrokontroler yang powerfull. Adapun blok diagramnya sebagai berikut :
2.3.1. Konfigurasi PIN Atmega8535
Gambar 2. 5 Konfigurasi Pin ATMega8535
Mikrokontroler Atmega8535 mempunyai jumlah pin sebanyak 40 buah, dimana 32 pin digunakan untuk keperluan port I/O yang dapat menjadi pin
input/output sesuai konfigurasi. Pada 32 pin tersebut terbagi atas 4 bagian (port), yang masing-masingnya terdiri atas 8 pin. Pin-pin lainnya digunakan untuk keperluan rangkaian osilator, supply tegangan, reset, serta tegangan referensi
untuk ADC. Untuk lebih jelasnya, (Agus. 2005). konfigurasi pin Atmega8535 dapat dilihat pada gambar 2.9.
Berikut ini adalah susunan pin-pin dari Atmega8535;
• VCC merupakan pin yang berfungsi sebagai pin masukkan catu daya • GND merupakan pin ground
• Port A (PA0..PA7) merupakan pin I/O dua arah dan pin masukan ADC • Port B (PB0..PB7) merupakan pin I/O dua arah dan pin fungsi khusus,
yaitu Timer/Counter, Komparator Analog, dan SPI
• Port C (PC0..PC7) merupakan pin I/O dua arah dan pin fungsi khusus, yaitu TWI, Komparator Analog, dan Timer Oscilator
• Port D (PD0..PD7) merupakan pin I/O dua arah dan pin fungsi khusus, yaitu Komparator Analog, Interupsi Iksternal dan komunikasi serial USART
• Reset merupakan pin yang digunakan untuk mereset mikrokontroler • XTAL1 dan XTAL2 merupakan pin masukkan clock eksternal
(osilator menggunakan kristal, biasanya dengan frekuensi 11,0592 MHz).
2.3.1.1. Port-Port Pada Atmega8535 Dan Fungsinya 2.3.1.1.1. Port A
Merupakan 8-bit directional port I/O. Setiap pinnya dapat menyediakan internal pull-up resistor (dapat diatur per bit). Output buffer Port A dapat memberi arus 20 mA dan dapat mengendalikan display LED secara langsung. Data Direction Register port A (DDRA) harus disetting terlebih dahulu sebelum Port A digunakan. Bit-bit DDRA diisi 0 jika ingin memfungsikan pin-pin port A yang bersesuaian sebagai input, atau diisi 1 jika sebagai output. Selain itu, kedelapan pin port A juga digunakan untuk masukan sinyal analog bagi A/D converter.
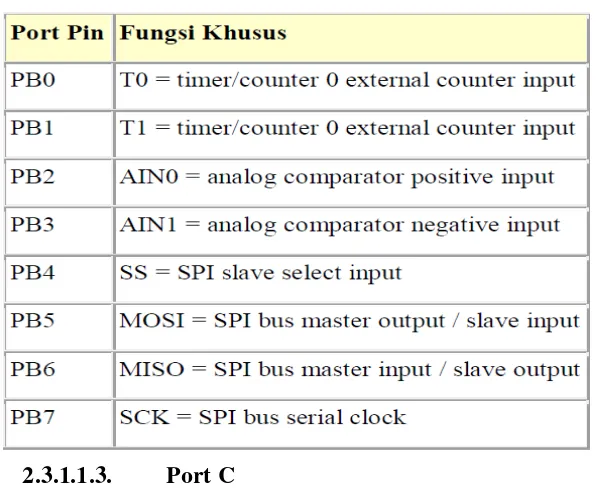
2.3.1.1.2. Port B
Merupakan 8-bit directional port I/O. Setiap pinnya dapat menyediakan internal pull-up resistor (dapat diatur per bit). Output buffer Port B dapat memberi
arus 20 mA dan dapat mengendalikan display LED secara langsung. Data Direction Register port B (DDRB) harus disetting terlebih dahulu sebelum Port B digunakan. Bit-bit DDRB diisi 0 jika ingin memfungsikan pin-pin port B yang bersesuaian sebagai input, atau diisi 1 jika sebagai output. Pin-pin port B juga memiliki untuk fungsi-fungsi alternatif khusus seperti yang dapat dilihat dalam tabel berikut .
Tabel 2.2 Fungsi Pin-pin Port B
2.3.1.1.3. Port C
Merupakan 8-bit directional port I/O. Setiap pinnya dapat menyediakan internal pull-up resistor (dapat diatur per bit). Output buffer Port C dapat memberi arus 20 mA dan dapat mengendalikan display LED secara langsung. Data Direction Register port C (DDRC) harus disetting terlebih dahulu sebelum Port C digunakan. Bit-bit DDRC diisi 0 jika ingin memfungsikan pin-pin port C yang bersesuaian sebagai input, atau diisi 1 jika sebagai output. Selain itu, dua pin port C (PC6 dan PC7) juga memiliki fungsi alternatif sebagai oscillator untuk timer/counter 2.
2.3.1.1.4. Port D
Merupakan 8-bit directional port I/O. Setiap pinnya dapat menyediakan internal pull-up resistor (dapat diatur per bit). Output buffer Port D dapat memberi arus 20 mA dan dapat mengendalikan display LED secara langsung. Data Direction Register port D (DDRD) harus disetting terlebih dahulu sebelum Port D digunakan. Bit-bit DDRD diisi 0 jika ingin memfungsikan pin-pin port D yang bersesuaian sebagai input, atau diisi 1 jika sebagai output. Selain itu, pin-pin port D juga memiliki untuk fungsi-fungsi alternatif khusus seperti yang dapat dilihat dalam tabel berikut.
Tabel 2.3 Fungsi Pin-pin Port D
2.3.1.1.5. RESET
RST pada pin 9 merupakan reset dari AVR. Jika pada pin ini diberi masukan low selama minimal 2 machine cycle maka system akan di-reset.
2.3.1.1.6. XTAL1
XTAL1 adalah masukan ke inverting oscillator amplifier dan input ke internal clock operating circuit
2.3.1.1.7. XTAL2
XTAL2 adalah output dari inverting oscillator amplifier. 2.3.1.1.8. AVcc
Avcc adalah kaki masukan tegangan bagi A/D Converter. Kaki ini harus secara eksternal terhubung ke Vcc melalui lowpass filter.
2.3.1.1.9. AREF
AREF adalah kaki masukan referensi bagi A/D Converter. Untuk operasionalisasi ADC, suatu level tegangan antara AGND dan Avcc harus diberikan ke kaki ini.
2.3.1.1.10. AGND
AGND adalah kaki untuk analog ground. Hubungkan kaki ini ke GND, kecuali jika board memiliki analog ground yang terpisah
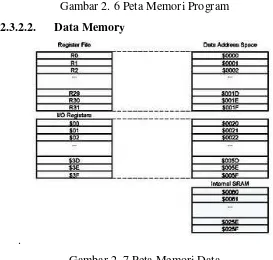
2.3.2. Peta Memori ATMega8535
ATMega8535 memiliki dua jenis memori yaitu Program Memory dan Data Memory ditambah satu fitur tambahan yaitu EEPROM Memory untuk penyimpan data.(Wardhana.2006)
2.3.2.1. Program Memory
ATMega8535 memiliki On-Chip In-System Reprogrammable Flash Memory untuk menyimpan program. Untuk alasan keamanan, program memory dibagi menjadi dua bagian, yaitu Boot Flash Section dan Application Flash Section. Boot Flash Section digunakan untuk menyimpan program Boot Loader, yaitu program yang harus dijalankan pada saat AVR reset atau pertama kali diaktifkan.
Application Flash Section digunakan untuk menyimpan program aplikasi yang dibuat user. AVR tidak dapat menjalakan program aplikasi ini sebelum menjalankan program Boot Loader. Besarnya memori Boot Flash Section dapat diprogram dari 128 word sampai 1024 word tergantung setting pada konfigurasi bit di register BOOTSZ. Jika Boot Loader diproteksi, maka program pada
Application Flash Section juga sudah aman.(Agus.2005)
Gambar 2. 6 Peta Memori Program 2.3.2.2. Data Memory
.
Gambar 2. 7 Peta Memori Data
Gambar berikut menunjukkan peta memori SRAM pada ATMEGA 8535. Terdapat 608 lokasi address data memori. 96 lokasi address digunakan untuk Register File dan I/O Memory sementara 512 likasi address lainnya digunakan untuk internal data SRAM. Register file terdiri dari 32 general purpose working register, I/O register terdiri dari 64 register
2.3.2.3. EEPROM Data Memory
ATMEGA 8535 memiliki EEPROM 8 bit sebesar 512 byte untuk menyimpan data. Loaksinya terpisah dengan system address register, data register dan control register yang dibuat khusus untuk EEPROM. Alamat EEPROM dimulai dari $000 sampai $1FF.
Gambar 2. 8 EEPROM Data Memory.
2.3.3. Status Register (SREG)
Status register adalah register berisi status yang dihasilkan pada setiap operasi yang dilakukan ketika suatu instruksi dieksekusi. SREG merupakan bagian dari inti CPU mikrokontroler.
Gambar 2. 9 Status Register ATMega 8535
• Bit 7 – I : Global Interrupt Enable
Jika bit Global Interrupt Enable diset, maka fasilitas interupsi dapat dijalankan. Bit ini akan clear ketika ada interrupt yang dipicu dari hardware, setelah program interrupt dieksekusi, maka bit ini harus di set kembali dengan instruksi SEI.
• Bit 6 – T : Bit Copy Storage
Instruksi bit copy BLD dan BST menggunakan bit T sebagai sumber atau tujuan dalam operasi bit.
• Bit 5 – H: Half Carry Flag
• Bit 4 – S : Sign Bit
Bit S merupakan hasil exlusive or dari Negative Flag N dan Two’s Complement Overflow Flag V.
• Bit 3 – V : Two’s Complement Overflow Flag Digunakan dalam operasi aritmatika
• Bit 2 – N : Negative Flag
Jika operasi aritmatika menghasilkan bilangan negatif, maka bit ini akan set.
• Bit 1 – Z : Zero Flag
Jika operasi aritmatika menghaslkan bilangan nol, maka bit ini akan set.
• Bit 0 – C : Carry Flag
Jika suatu operasi menghasilkan Carry, maka bit ini akan set.
2.4.Bahasa Pemrograman Mikrokontroler
Pengembangan sebuah sistem menggunakan mikrokontroler AVR buatan ATMEL menggunakan software AVR STUDIO dan CodeVisionAVR. AVR STUDIO merupakan software yang digunakan untuk bahasa assembly yang mempunyai fungsi yang sangat lengkap, yaitu digunakan untuk menulis program, kompilasi, simulasi dan download program ke IC mikrokontroler AVR. Sedangkan CodeVisionAVR merupakan software C-cross Compiler, dimana program dapat ditulis dalam bahasa C, CodeVision memiliki IDE (Integrated development Environment) yang lengkap, dimana penulisan program, compile,link, pembuatan kode mesin (assembler) dan download program ke chip AVR dapat dilakukan dengan CodeVision, selain itu ada fasilitas terminal, yaitu melakukan komunikasi serial dengan mikrokontroler yang sudah di program. Proses download program ke IC mikrokontroler AVR dapat menggunakan System programmable Flash on-Chip mengizinkan memori program untuk diprogram ulang dalam sistem menggunakan hubungan serial SPI.
2.4.1. CodevisionAVR
CodeVisionAVR merupakan sebuah cross-compiler C, Integrated Development Environtment (IDE), dan Automatic Program Generator yang didesain untuk mikrokontroler buatan Atmel seri AVR. CodeVisionAVR dapat dijalankan pada sistem operasi Windows 95, 98, Me, NT4, 2000, dan XP. Cross-compiler C mampu menerjemahkan hampir semua perintah dari bahasa ANSI C, sejauh yang diijinkan oleh arsitektur dari AVR, dengan tambahan beberapa fitur
untuk mengambil kelebihan khusus dari arsitektur AVR dan kebutuhan pada sistem embedded.
File object COFF hasil kompilasi dapat digunakan untuk keperluan debugging pada tingkatan C, dengan pengamatan variabel, menggunakan debugger Atmel AVR Studio. IDE mempunyai fasilitas internal berupa software AVR Chip In-System Programmer yang memungkinkan Anda untuk melakukan transfer program kedalam chip mikrokontroler setelah sukses melakukan kompilasi/asembli secara otomatis. Software In-System Programmer didesain untuk bekerja dengan Atmel STK500/AVRISP/AVRProg, Kanda Systems STK200+/300, Dontronics DT006, Vogel Elektronik VTEC-ISP, Futurlec JRAVR dan MicroTronics ATCPU/Mega2000 programmers/development boards.
Untuk keperluan debugging sistem embedded, yang menggunakan komunikasi serial, IDE mempunyai fasilitas internal berupa sebuah Terminal. Selain library standar C, CodeVisionAVR juga mempunyai library tertentu untuk:
• Modul LCD alphanumeric
• Bus I2C dari Philips
• Sensor Suhu LM75 dari National Semiconductor
• Real-Time Clock: PCF8563, PCF8583 dari Philips, DS1302 dan DS1307 dari Maxim/Dallas Semiconductor
• Protokol 1-Wire dari Maxim/Dallas Semiconductor
• Sensor Suhu DS1820, DS18S20, dan DS18B20 dari Maxim/Dallas Semiconductor
• Termometer/Termostat DS1621 dari Maxim/Dallas Semiconductor
• EEPROM DS2430 dan DS2433 dari Maxim/Dallas Semiconductor
• SPI
• Power Management
• Delay
• Konversi ke Kode Gray
CodeVisionAVR juga mempunyai Automatic Program Generator bernama CodeWizardAVR, yang mengujinkan Anda untuk menulis, dalam hitungan menit, semua instruksi yang diperlukan untuk membuat fungsi-fungsi berikut:
• Set-up akses memori eksternal
• Inisialisasi port input/output
• Inisialisasi interupsi eksternal
• Inisialisasi Timer/Counter
• Inisialisasi Watchdog-Timer
• Inisialisasi UART (USART) dan komunikasi serial berbasis buffer yang digerakkan oleh interupsi
• Inisialisasi Pembanding Analog
• Inisialisasi ADC
• Inisialisasi Antarmuka SPI
• Inisialisasi Antarmuka Two-Wire
• Inisialisasi Antarmuka CAN\
• Inisialisasi Bus I2C, Sensor Suhu LM75, Thermometer/Thermostat DS1621 dan Real-Time Clock PCF8563, PCF8583, DS1302, dan DS1307
• Inisialisasi Bus 1-Wire dan Sensor Suhu DS1820, DS18S20
• Inisialisasi modul LCD
BAB III
PERANCANGAN ALAT DAN PEMBUATAN SISTEM
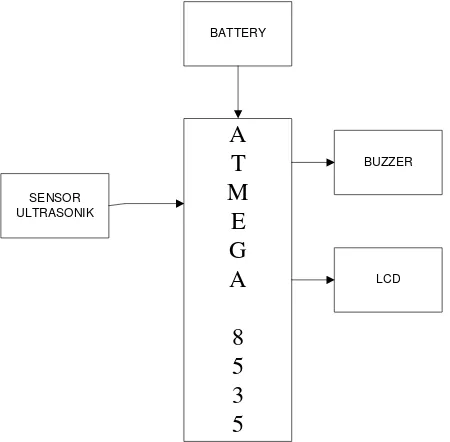
3.1 Perancangan Blok Diagram Sistim
Diagram merupakan pernyataan hubungan yang berurutan dari suatu atau lebih komponen yang memiliki kesatuan kerja tersendiri, dan setiap blok komponen mempengaruhi komponen yang lainnya. Diagram blok merupakan salah satu cara yang paling sederhana untuk menjelaskan cara kerja dari suatu sistem .Dengan diagram blok kita dapat menganalisa cara kerja rangkaian dan merancang hardware yang akan dibuat secara umum.
Adapun diagram blok dari system yang dirancang,seperti yang diperlihatkan pada gambar 3.1
Gambar 3.1. Diagram Blok Sistim
a. Baterai berfungsi sebagai sumber tegangan dari seluruh sistem agar sistem dapat bekerja.
b. AVR ATmega8535 merupakan pusat kendali dari seluruh rangkaian.
Dimana mikrokontroller akan mengecek sinyal yang dikirimkan oleh sensor,
c. Sensor ping ultrasonic berfungsi untuk mendeteksi halangan di depan d. Buzzer berfungsi sebagai indikator keluaran dalam bentuk suara. e. LCD berfungsi sebagai indikator dalam bentuk tampilan
3.2 Perancangan Rangkaian Catu Daya
Rangkaian ini berfungsi untuk mensupplay tegangan ke seluruh rangkaian yang ada. Rangkaian Catu daya (Power Supply Adaptor) ini terdiri dari satu keluaran, yaitu 5 volt. Keluaran 5 volt digunakan untuk mensupplay tegangan ke rangkaian mikrokontroller AVR Atmega8535, sensor ultrasonik dan LCDRangkaian catu daya ditunjukkan pada gambar 3.2 berikut ini :
Gambar 3.2 Rangkaian Catu Daya
Baterai merupakan sumber tegangan DC, selanjutnya akan diratakan oleh kapasitor 220 µF. Regulator tegangan 5 volt (7805) digunakan agar keluaran yang dihasilkan tetap 5 volt walaupun terjadi perubahan pada
tegangan masukannya.
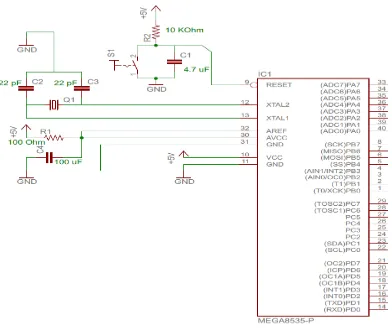
3.3. Rangkaian Mikrokontroler ATMega8535
Rangkaian sistem minimum mikrokontroler ATMEGA 8535 dapat dilihat pada gambar 3.2 di bawah ini :
Gambar 3.2 Rangkaian sistem minimum mikrokontroler ATMEGA 8535
Dari gambar 3.2, Rangkaian tersebut berfungsi sebagai pusat kendali dari seluruh sistem yang ada. Komponen utama dari rangkaian ini adalah IC Mikrokontroler ATMega8535. Semua program diisikan pada memori dari IC ini sehingga rangkaian dapat berjalan sesuai dengan yang dikehendaki.
Pin 12 dan 13 dihubungkan ke XTAL 11,0592 MHz dan dua buah kapasitor 30 pF. XTAL ini akan mempengaruhi kecepatan mikrokontroler ATMega8535 dalam mengeksekusi setiap perintah dalam program. Pin 9 merupakan masukan
reset (aktif rendah). Pulsa transisi dari tinggi ke rendah akan me-reset mikrokontroler ini.
Untuk men-download file heksadesimal ke mikrokontroler, Mosi, Miso, Sck, Reset, Vcc dan Gnd dari kaki mikrokontroler dihubungkan ke RJ45. RJ45 sebagai konektor yang akan dihubungkan ke ISP Programmer. Dari ISP Programmer inilah dihubungkan ke komputer melalui port paralel.
Kaki Mosi, Miso, Sck, Reset, Vcc dan Gnd pada mikrokontroler terletak pada kaki 6, 7, 8, 9, 10 dan 11. Apabila terjadi keterbalikan pemasangan jalur ke ISP Programmer, maka pemograman mikrokontroler tidak dapat dilakukan karena mikrokontroler tidak akan bisa merespon.
3.2 Rangkaian Sensor Ultrasonic
Di dalam blok sensor ultrasonic ada 2 rangkaian yang saling berhubungan yaitu Transmitter sebagai pengirim data dari objek ke benda dan Receiver sebagai penerima data dari benda ke objek
Jarak antara ultrasonic tranducer Rx dan Tx mempengaruhi kinerja alat dalam aplikasi ini. Pengaturan resistor variabel R6 pada rangkaian receiver dapat dilakukan saat rangkaian dinyalakan yaitu dengan acuan tampilan LCD. Bila LCD selalu menampilkan “Distance = 001 cm” berarti jendela komparator terlalu sempit sehingga dapat di-trigger oleh gelombang ultrasonic langsung dari Tx bukan pantulan dari benda di depannya.
Gambar 3.3. Jarak antara Tx – Rx
Proses pengukuran jarak dipicu dengan mengirimkan pulsa negatif (logika 0 / 0 V) selama 20 µs. Setelah perintah diterima dan dikenali, modul ultrasonic akan mulai mengukur jarak dengan menggunakan ultrasonic ranger. Selama modul sedang dalam proses mengukur jarak Proses pengukuran jarak akan
berlangsung antara 100 µs – 25 ms tergantung pada berapa jarak obyek dan pengukuran apa saja yang dilakukan. Proses pengukuran tersebut memberi waktu untuk mengganti pin mikrokontroler yang dihubungkan ke pin SIG menjadi input dan menyiapkan mikrokontroler untuk menghitung lebar pulsa.
Setelah proses pengukuran selesai, modul ultrasonik akan mengirimkan data hasil pengukuran berupa pulsa negatif yang lebarnya proporsional terhadap jarak obyek yang diukur/dideteksi. Pulsa selebar 10 µs menyatakan jarak 1 mm. Jadi misalkan lebar pulsa yang dikirim adalah 10 ms, maka hasil pengukuran adalah 100 cm.
pulsa di bawah ini adalah keluaran gelombang ultrasonic :
Gambar 3.4. Keluaran Pulsa Ultrasonic
3.6 Display LCD Character 2x16
Display LCD 2x16 berfungsi sebagai penampil nilai jarak sensor ultrasonic yang terukur oleh alat. LCD yang digunakan pada alat ini mempunyai lebar display 2 baris 16 kolom atau biasa disebut sebagai LCD Character 2x16, dengan 16 pin konektor, yang didifinisikan sebagai berikut:
Tabel 3.1 Fungsi Pin LCD Character 2x16
Gambar 3.8 LCD Character 2x16
Modul LCD terdiri dari sejumlah memory yang digunakan untuk display. Semua teks yang kita tuliskan ke modul LCD akan disimpan didalam memory ini, dan modul LCD secara berturutan membaca memory ini untuk menampilkan teks ke modul LCD itu sendiri.
Gambar 3.9 Peta Memory LCD character 2x16
PIN Nama fungsi
1 VSS Ground voltage
2 VCC +5V
3 VEE Contrast voltage
4 RS Register Select
0= Instruction Register 1= Data Register
5 R/W Read/ Write, to choose write or read
mode
15 BPL Back Plane Light
16 GND Ground voltage
Pada peta memori diatas, daerah yang berwarna biru (00 s/d 0F dan 40 s/d 4F) adalah display yang tampak. jumlahnya sebanyak 16 karakter per baris dengan dua baris. Angka pada setiap kotak adalah alamat memori yang bersesuaian dengan posisi dari layar. Dengan demikian dapat dilihat karakter pertama yang berada pada posisi baris pertama menempati alamat 00h dan karakter kedua yang berada pada posisi baris kedua menempati alamat 40h.
Agar dapat menampilkan karakter pada display maka posisi kursor harus terlebih dahulu diset. Instruksi Set Posisi Kursor adalah 80h dengan demikian untuk menampilkan karakter, nilai yang terdapat pada memory harus ditambahkan dengan 80h.Sebagai contoh, jika kita ingin menampilkan huruf “A” pada baris kedua pada posisi kolom ke sepuluh, maka sesuai dengan peta memory, posisi karakter pada kolom 10 dari baris kedua mempunyai alamat 4Ah, sehingga sebelum kita menampilkan huruf “A” pada LCD, kita harus mengirim instruksi set posisi kursor, dan perintah untuk instruksi ini adalah 80h ditambah dengan alamat 80h + 4Ah = 0Cah. Sehingga dengan mengirim perintah 0Cah ke LCD, akan menempatkan kursor pada baris kedua dan kolom ke 10.
3.4. Rangkaian buzzer
Buzzer menggunakan tegangan 5 volt. Buzzer diletak didekat dengan rangkaian diletakkan di tongkat. Buzzer berfungsi sebagai indikator bahwa sensor ultrasonik mendeteksi benda dengan jarak yang cukup dekat, maka mikro akan memberikan logika high pada port keluaran buzzer
3.3 Diagram Alir Program
Gambar 3.7. Flowchart Cara Kerja Sistem
START
INISIALIASASI PORT
Mulai pembacaan sensor ultrasonic
BUZZER HIDUP 1 x Jarak < 2 m ?
BUZZER HIDUP 2x YA
Jarak < 1,5 m ?
Jarak < 1 m ? tidak
tidak
BUZZER HIDUP 3x ya
ya
selesai
BAB IV
PENGUJIAN ALAT DAN ANALISA RANGKAIAN
4.1. Pengujian Rangkaian Power Supply
Pengujian rangkaian power supply ini bertujuan untuk mengetahui tegangan yang dikeluarkan oleh rangkaian tersebut, dengan mengukur tegangan keluaran dari power supply menggunakan multimeter digital. Setelah dilakukan pengukuran maka diperoleh besarnya tegangan keluaran sebesar 5 volt. Dengan begitu dapat dipastikan apakah terjadi kesalahan terhadap rangkaian atau tidak jika diukur,
4.2. Pengujian Rangkaian Mikrokontroler ATMega8535
Pengujian pada rangkaian mikrokontroler ATMega8535 ini dapat dilakukan dengan menghubungkan rangkaian ini dengan rangkaian power supply sebagai sumber tegangan. Kaki 40 dihubungkan dengan sumber tegangan 5 volt, sedangkan kaki 20 dihubungkan dengan ground. Kemudian tegangan pada kaki 40 diukur dengan menggunakan Voltmeter. Dari hasil pengujian didapatkan tegangan pada kaki 40 sebesar 4,9 volt. Langkah selanjutnya adalah memberikan program sederhana pada mikrokontroler ATMega 8535, program yang diberikan adalah sebagai berikut:
Daftar Pustaka
Agfianto Eko Putra, Teknik antar muka computer : konsep & aplikasi, Penerbit Graha Ilmu, Yogyakarta, 2002
Charles L. Philips, Royce D. Harbor, Sistem Kontrol, Penerbit PT Prenhallindo, Jakarta,
Arisman, Dr., MB, Gizi dalam daur kehidupan, Penerbit Buku kedokteran EGC, DEPKES, 1996
Interfacing the serial/ RS 232 Port/ http : // www. beyondlogic.org/ serial/
Prentice- hall, inc., Englewood Cliffs Nj, Electronic Instrumentasi & Measurement Tecniques, Penerbit Erlangga, Jakarta, 1999
Retna Prasetia dan Catur Edi Widodo,Teori dan Praktek Interfacing Port Parallel & Port Serial Komputer dengan VB 6.0, Penerbit Andi Yogyakarta
Suhata, ST, VB Sebagai Pusat Kendali Peralatan Elektronik, Penerbit Elex Media Komputindo, Jakarta, 2005.
Wolfgang link, Pengukuran, pengendalian & pengaturan dengan PC, Penerbit Elex Media Komputindo, Jakarta, 1993
www.datsheet4u.com
LAMPIRAN A
Pada gambar A. di bawah ini menjelaskan tentang layout atau susunan komponen yang mencakup semuanya alat tongkat tunanetra selanjutnya dapat di lihat pada gambar sebagai berikut :
Gambar A. Layout alat tongkat tunanetra
LAMPIRAN B
Pada lampiran B ini terdapat program yang ada di dalam mikrokontroller dengan menggunakan bahasa C sebagai pembaca data dari sensor selanjutnya dapat di perhatikan proram sebagai berikut :
Program Bahasa C ( Mikrokontroller )
/*****************************************************/ /***************************************************** This program was produced by the
CodeWizardAVR V2.05.3 Standard Automatic Program Generator
© Copyright 1998-2011 Pavel Haiduc, HP InfoTech s.r.l. http://www.hpinfotech.com
#include <delay.h>
// Alphanumeric LCD functions #include <alcd.h>
// Declare your global variables here unsigned char sensor [16];
void main(void) {
// Declare your local variables here
// Input/Output Ports initialization // Port A initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In // State7=T State6=T State5=T State4=T State3=T State2=T State1=T State0=T PORTA=0x00;
DDRA=0x00;
// Port B initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In // State7=T State6=T State5=T State4=T State3=T State2=T State1=T State0=T PORTB=0x00;
DDRB=0x00;
// Port C initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In // State7=T State6=T State5=T State4=T State3=T State2=T State1=T State0=P PORTC=0x00;
DDRC=0x01;
// Port D initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In // State7=T State6=T State5=T State4=T State3=T State2=T State1=T State0=T PORTD=0x00;
DDRD=0x00;
// Timer/Counter 0 initialization // Clock source: System Clock // Clock value: Timer 0 Stopped // Mode: Normal top=0xFF
// OC0 output: Disconnected TCCR0=0x00;
TCNT0=0x00; OCR0=0x00;
// Timer/Counter 1 initialization // Clock source: System Clock // Clock value: Timer1 Stopped // Mode: Normal top=0xFFFF // OC1A output: Discon. // OC1B output: Discon. // Noise Canceler: Off
// Input Capture on Falling Edge // Timer1 Overflow Interrupt: Off // Input Capture Interrupt: Off // Compare A Match Interrupt: Off // Compare B Match Interrupt: Off TCCR1A=0x00;
// Timer/Counter 2 initialization // Clock source: System Clock // Clock value: Timer2 Stopped // Mode: Normal top=0xFF // OC2 output: Disconnected
ASSR=0x00; TCCR2=0x00; TCNT2=0x00; OCR2=0x00;
// External Interrupt(s) initialization // INT0: Off
// INT1: Off // INT2: Off MCUCR=0x00; MCUCSR=0x00;
// Timer(s)/Counter(s) Interrupt(s) initialization TIMSK=0x00;
// USART initialization // USART disabled UCSRB=0x00;
// Analog Comparator initialization // Analog Comparator: Off
// TWI initialization // TWI disabled TWCR=0x00;
// Alphanumeric LCD initialization // Connections are specified in the
lcd_putsf("berbahaya"); PORTC.0=1;
delay_ms(100); PORTC.0=0; delay_ms(100); lcd_clear(); }
} }