LAPORAN TUGAS AKHIR
PROTOTYPE PENGENDALIAN ROTASI MOTOR DC
MENGGUNAKAN
LabVIEW 7.1
Disusun Oleh :
062408006
RAHMAT FUAD
PROGRAM STUDI FISIKA INSTRUMENTASI
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATERA UTARA
LAPORAN TUGAS AKHIR
PROTOTYPE PENGENDALIAN ROTASI MOTOR DC
MENGGUNAKAN
LabVIEW 7.1
Diajukan sebagai salah satu syarat guna memperoleh gelar Ahli Madya pada Program studi DIII Fisika Instrumentasi
Jurusan Fisika Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Sumatera Utara
Disusun Oleh :
062408006
RAHMAT FUAD
PROGRAM STUDI FISIKA INSTRUMENTASI
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATERA UTARA
KATA PENGANTAR
Alhamdulillahi Rabil’alamin
Puji syukur hanya kehadirat Allah SWT yang telah melimpahkan rahmat, hidayah dan bimbingan-Nya, sehingga penulis dapat menyelesaikan penulisan laporan Tugas Akhir ini sebagai salah satu syarat untuk menyelesaikan studi pada Program Diploma III Fisika Instrumentasi.
Adapun tugas akhir ini mengambil judul Prototype Pengendalian Rotasi
pada Motor DC Menggunakan LabVIEW 7.1.
Keberhasilan penyusunan tugas akhir ini tidak terlepas dari bantuan, bimbingan dan dukungan berbagai pihak. Untuk itu dengan penuh rasa hormat dan tulus penulis mengucapkan terima kasih sebesar-besarnya kepada :
1. Bapak Drs. Luhut Sihombing M.S, sebagai pembimbing lapangan, yang telah memberikan banyak pengertiannya,
pengarahan-pengarahan dalam menyelesaikan Tugas Akhir.
2. Bapak Drs. Sudjono M.S sebagai dosen wali selama masa studi penulis, terima kasih atas bimbingan dan pengarahannya. 3. Ayahanda, ibunda dan saudara-saudaraku tercinta yang telah
memberikan doa, dukungan baik moril maupun materil.
Penulis menyadari sepenuhnya bahwa dalam pembuatan tugas akhir ini masih terdapat banyak kekurangan serta kesalahan, oleh karena itu penulis
menghargaiadanya saran dan kritikan yang dapat memperbaiki atau mengevaluasi sehingga bermanfaat untuk perbaikan dimasa yang akan dating.
Semoga laporan ini menjadi ibadah yang baik bagi penulis dan menjadi ilmu yang bermanfaat bagi pembaca.
Amin Yaa Rabbal’alamin
Medan, Novenber 2009
DAFTAR ISI
Halaman Sampul……… i
Halaman Pengesahan……….... ii
Halaman Persembahan……… iv
Kata Pengantar………. v
Daftar Isi………...vii
Daftar Gambar……….. x
Daftar Tabel……… xii
Intisari………..xiii
BAB I PENDAHULUAN………..1
1.1Latar Belakang Pemilihan Judul………1
1.2Maksud dan Tujuan………...2
1.3Batasan Masalah………2
1.4Metode Pendekatan Masalah……….2
1.5Sistematika Penulisan………3
BAB I Pendahuluan………3
BAB II Dasar Teori………..3
BAB III Perancangan dan Perakitan………..4
BAB IV Hasil dan Pembahasan……….4
BAB II DASAR TEORI……….4
2.1 Konsep Dasar Perangkat Keras………..4
2.1.1 Motor DC………5
2.1.2 Antarmuka Menggunakan Port Paralel……… 6
2.1.3 H-Bridge (Rangkaian Jembatan H)……… 10
2.1.4 Pulse Width Modulation (PWM)……… 11
2.1.5 Sensor Kecepatan (Optokopler)………14
2.1.6 Pemicu Schimitt (IC 7414)………15
2.2 Konsep Dasar Perangkat Lunak……… 16
2.2.1 LabView (Laboratory Virtual Instrument Engineering Workbench………16
BAB III PERANCANGAN SISTEM DAN PEMOGRAMAN………26
3.1 Sistem Perangkat Keras (Hardware)………26
3.1.1 Antarmuka Port Paralel……….28
3.1.2 IC L293D Sebagai Pengendali Motor DC………28
3.1.3 Brushed Motor………..31
3.1.4 Rangkaian Sensor Kecepatan………31
3.1.5 Rangkaian Catu Daya………35
3.2 Sistem Perangkat Lunak………...36
3.2.1 Pengendali Arah Putaran Motor, Kecepatan Motor dan PWM…….37
BAB IV HASIL DAN PEMBAHASAN……… 46
4.1 Hasil Percobaan………46
4.2 Pembahasan………..50
BAB V KESIMPULAN DAN SARAN……… 52
5.1 Kesimpulan………..52
5.2 Saran……….52
DAFTAR PUSTAKA
DAFTAR GAMBAR
Gambar 2.1 Rangkaian motor shunt………4
Gambar 2.2 Rangkaian motor seri……… 5
Gambar 2.3 Rangkaian motor Kompon……… 5
Gambar 2.4 Tata-letak pin port parallel (printer)………. 6
Gambar 2.5 Rangkaian jembatan H………. 10
Gambar 2.6 Rangkaian lebar pulsa……….. 12
Gambar 2.7 IC L293D……….. 12
Gambar 2.8 Arsitektur rangkaian dalam IC L293D………..13
Gambar 2.9 Simbol Optokopler……….14
Gambar 2.10 Diagram pin IC 7414……….15
Gambar 3.1 Blok diagram rangkaian pengendali motor DC……….26
Gambar 3.2 Blok diangram keseluruhan pengendali motor DC………27
Gambar 3.3. Rangkaian pengendali motor DC……….. 27
Gambar 3.4 Konfigurasi pin IC L293D (Unitrode/)………..29
Gambar 3.5 Rangkaian IC L293 sebagai pengendali motor DC ……….30
Gambar 3.6 Brushed motor………31
Gambar 3.7 Rangkaian pencacah RPM……….31
Gambar 3.8 Rangkaian optokopler………33
Gambar 3.9 Rangkaian Transistor dan pemicu schimit………34
Gambar 3.10 Posisi mekanis optokopler……….35
Gambar 3.12 Diagram alir pengendali arah putaran, kecepatan dan PWM…….37
Gambar 3.13 Diagram blok pengendali arah putaran motor, kecepatan motor dan PWM... 38
Gambar 3.14 Diagram blok arah putar motor kanan……… 39
Gambar 3.15 Diagram blok sequence pada arah putar motor kanan………… 39.
Gambar 3.16 Diagram blok arah putar kiri………..40
Gambar 3.17 Diagram blok sequence pada arah putar motor kiri……… 40
Gambar 3.18 Diagram alir proses pembacaan kecepatan motor……….42
Gambar 3.19 Diagram blok baca optokopler………..43
Gambar 3.20 Diagram alir hitung RPM………. 44
Gambar 3.21 Diagram blok rumus menghitung nilai RPM……….44
Gambar 3.22 Diagram blok reset variabel cacah……… 45
Gambar 4.1 Alat pengendali motor DC ………46
Gambar 4.2 Gambar grafik perubahan RPM……….47
Gambar 4.3 Tampilan Hasil request arah putar kanan………..49
Gambar 4.4 Tampilan hasil request arah putar kiri………...49
DAFTAR TABEL
Tabel 2.1 Tabel signal dan fungsi pin port parallel……… 7
Tabel 2.2 Alamat-alamat dasar kanal paralel………. 8
Tabel 2.3 Register data port paralel……… 8
Tabel 2.4 Register status port paralel………. 9
Tabel 2.5 Register kontrol port paralel………..10
Tabel 2.6 Fungsi struktur………...17
Tabel 2.7 Fungsi numerik……….. 18
Tabel 2.8 Fungsi Boolean……….. 19
Tabel 2.9 Fungsi string………...20
Tabel 2.10 Fungsi larik……… 21
Tabel 2.11 Fungsi perbandingan………. 22
Tabel 2.12 Fungsi waktu dan dialog ………...23
Tabel 2.13 Fungi penanganan berkas ………. 23
Tabel 2.14 Fungsi komunikasi TCP/IP………24
Tabel 2.15 Fungsi I/O………...25
BAB I
PENDAHULUAN
1.1. Latar Belakang Pemilihan Judul
Perkembangan teknologi elektronika yang begitu pesat memicu lahirnya berbagai instrument-instument elektronika yang bertujuan mempermudah berbagai kegiatan manusia.
Berbagai aplikasi yang membutuhkan informasi kecepatan putaran, misalnya untuk menentukan kecepatan putaran turbin pada kapal, pesawat atau perahu motor atau pengukur kecepatan angin, atau seberapa besar daya yang dihasilkan mesin, atau apakah rotasinya begitu cepat sehingga menyebabkan terjadinya kerusakan pada alat mekanik.
1.2. Maksud dan Tujuan
1. Membuat rangkaian pengendali mekanik dalam hal ini menggunakan motor DC.
2. Mengetahui kegunaan dan cara kerja rangkaian mekanik (Motor DC).
3. Menggunakan dan memahami pemrograman LabVIEW 7.1 sebagai pengendali mekanik.
4. Untuk menerapkan ilmu yang diperoleh dibangku kuliah DIII Elektronika dan Instrumentasi.
1.3. Batasan Masalah
Lingkup pembahasan laporan tugas akhir ini hanya dibatasi pada masalah yang berhubungan dengan :
Mengendalikan motor DC melalui port paralel PC menggunakan LabVIEW 7.1 sehingga hasil dapat ditampilkan pada PC, serta motor dapat berotasi dengan baik
1.4. Metodologi Pendekatan Masalah
Beberapa metode yang dipakai dalam penyusunan Tugas Akhir ini adalah sebagai berikut :
1. Mempelajari dan mengambil data-data dari buku-buku yang berhubungan dengan pembuatan alat.
3. Mengamati alat-alat yang cara kerjanya berhubungan dengan alat yang dibuat.
4. Mempelajari penggunaan perangkat lunak LabVIEW 7.1 yang dapat digunakan sebagaiprogram pengendali.
1.5. Sistematika Penulisan Laporan
Agar pembahasan masalah dapat dilakukan secara sistematis, maka penulisan dilakukan dengan susunan sebagai berikut:
Bab 1 : Pendahuluan, berisi latar belakang, perumusan masalah, tujuan penulisan, metode pendekatan masalah dan sistematika penulisan laporan.
Bab 2 : Dasar Teori berisi tentang Mekanik (motor DC) , port paralel, H-bridge, pengertian PWM, optokopler, pemicu Schmitt (IC 7414) dan LabVIEW 7.1.
Bab 3 : Perancangan Sistem dan Pemrograman, berisi gambaran spesifikasi sistem, rancangan dasar komponen perangkat keras dan perangkat lunaknya
Bab 4 : Hasil dan Pembahasan, berisi hasil pengujian dan pembahasan.
BAB II
DASAR TEORI
2.1. Konsep Dasar Perangkat Keras
2.1.1 Motor DC
Motor DC merupakan perangkat yang berfungsi merubah besaran listrik menjadi besaran mekanik. Prinsip kerja motor didasarkan pada gaya elektromagnetik. Motor DC bekerja bila mendapatkan tegangan searah yang cukup pada kedua kutupnya. Tegangan ini akan menimbulkan induksi elektromagnetik yang menyebabkan motor berputar.
Pada umumnya motor diklasifikasikan menurut jenis power yang digunakan dan prinsip kerja motor. Ada tiga jenis motor DC (yang pokok) diklasifikasikan menurut metode penguatan medan, yaitu :
• Motor shunt, menggunakan kumparan medan magnet dengan tahanan relatif
tinggi dengan banyak lilitan kawat kecil, biasanya dihubungkan paralel (paralel dengan jangkar) sebagaimana ditunjukkan pada Gambar 2.1
• Motor seri, menggunakan kumparan medan tahanan sangat rendah dengan
lilitan sangat sedikit, kawat besar dihubungkan seri dengan jangkar sebagaimana ditunjukkan pada Gambar 2.2
Gambar 2.2 Rangkaian motor seri
• Motor kompon, menggunakan kombinasi medan shunt (lilitan banyak dari
kawat kecil) paralel dengan jangkar dan medan seri (lilitan sedikit dari kawat besar) dihubungkan seri dengan jangkar sebagaimana ditunjukkan pada Gambar 2.3
2.1.2 Antarmuka Menggunakan Port Paralel
Port paralel banyak digunakan dalam berbagai macam aplikasi antarmuka. Port ini membolehkan kita memiliki masukan hingga 8 bit atau keluaran hingga 12 bit pada saat yang bersamaan, dengan hanya membutuhkan rangkaian eksternal sederhana untuk melakukan suatu tugas tertentu.
Port parallel atau port printer, dipastikan selalu ada pada setiap komputer. Sesuai dengan namanya, port paralel banyak dimanfaatkan untuk urusan pencetakan data. Sebenarnya, port inipun bisa dimanfaatkan untuk hal lain, karena memiliki input/output (I/O) data. Tata letak 25 pin port paralel (printer) ditunjukkan pada Gambar 2. 4.
Gambar 2. 4. Tata-letak pin port paralel (printer)
Pin 10 sampaidengan pin 13 dan pin 15 (PS3-PS7) berfungsi sebagai masukan yang dapat dijadikan untuk mendeteksi status peralatan luar.
Tabel 2.1 Tabel signal dan fungsi pin port paralel
Port paralel memiliki tiga alamat dasar yang bisa digunakan. Alamat dasar 3BCh pertama kali diperkenalkan sebagai alamat port paralel pada kartu-kartu video lama. Alamat ini kemudian sempat menghilang saat port paralel dicabut dari kartu-kartu video. Sekarang muncul kembali sebagai pilihan untuk port paralel yang terpadu dengan motherboard, yang konfigurasinya dapat diubah melalui BIOS.
Tabel 2.2 Alamat-alamat dasar kanal paralel
Alamat Keterangan
3BCh – 3BFh Digunakan untuk Kanal Paralel yang terpadu dengan kartu-kartu video, tidak mendukung alamat-alamat ECP.
378h – 37Fh Biasa digunakan untuk LPT1
278h – 27Fh Biasa digunakan untuk LPT2
Port paralel memiliki tiga register perangkat lunak yang digunakan yaitu register data, status, dan kontrol. Alamat dasar, biasa dinamakan port data atau register data digunakan untuk mengeluarkan data pada jalur data port paralel (pin 2 sampaidengan. 9). Register ini normalnya sebagai port hanya tulis. Pada Tabel 2.3 ditunjukkan keterangan mengenai fungsi tiap-tiap bit pada port data.
Tabel 2.3. Register Data port paralel
Offset Nama Baca/Tulis Bit? Keterangan
Base + 0 Data Port Baca dan/atau
11, 12, 13 dan 15), sebuah register status IRQ dan dua bit tercadang. Bit-7 (Busy) sebagai masukan inversi, jika bit-7 terbaca sebagi logika 0 artinya pada pin tersebut terpasang tegangan +5V. Juga pada bit-2 (IRQ),jika bit ini terbaca ‘1’, artinya interupsi (sela) tidak muncul.
Tabel 2.4. Register status port paralel
Offset Nama Baca/Tulis Bit? Keterangan
Base + 1 Status
Port Hanya Baca
Bit 7 Busy
Bit 6 Ack
Bit 5 Paper
Out/End
Bit 4 Select
Bit 3 Error
Bit 2 IRQ
Bit 1 Tercadang
Bit 0 Tercadang
Tabel 2.5. Register kontrol port paralel
Offset Nama Baca/Tulis Bit? Keterangan
Base + 2 Kontrol
Bit 2 Inisialisasi
(Reset)
Bit 1 Autofeed
Bit 0 STROBE
2.1.3 H-Bridge (Rangkaian Jembatan H)
Bridge berfungsi untuk mengatur arah putaran motor DC. Jembatan H-Bridge terdiri dari terdiri dari empat saklar yang terhubung secara topologi membentuk huruf H dan terminal motor terletak pada garis horizontal huruf H, sebagaimana yang ditunjukkan pada Gambar 2.2.
Didalam sebuah rangkaian jembatan H, saklar menutup dan membuka dengan teratur sehingga ketika diberikan tegangan pada kutub yang sama diseberang motor arus dapat melewatinya dengan putaran motor maju atau tegangan pada kutub yang berlawanan, menimbulkan arus mengalir menggerakkan motor dengan arah putaran terbalik. Jika pada saklar S1 dan S4 ditutup sedangkan saklar S2 dan S3 dibuka, arus akan mengalir dari kiri ke kanan didalam motor, atau dengan kata lain tegangan positif melewati terminal. Ketika saklar S2 dan S3 ditutup dan saklar S1 dan S4 dibuka maka arus akan mengalir dari kanan ke kiri, membalikkan kutub tegangan. Jika terminal di hubung buka maka motor akan terjadi freewheel dan jika terminal dihubung singkat maka motor akan mengerem.
Saklar-saklar pada jembatan H digantikan oleh transistor, yang competeble dengan TTL. Rangkaian jembatan H ini terdapat pada IC L293D.
2.1.4. Pulse Width Modulation (PWM)
Gambar 2.6. Modulasi lebar pulsa
V adalah tegangan pada motor dan t adalah waktu, dengan menekan saklar dengan cepat maka dapat menimbulkan tegangan rata-rata yang melewati motor. Kecepatan motor dapat ditingkat dengan mengubah rasio lebar pulsa dari tegangan yang melewati terminal.
Untuk mengatur kecepatan motor tersebut digunakan sinyal PWM yang diumpankan pada IC L293D sebagaimana yang ditunjukkan pada Gambar 2.7.
Pada Gambar 2.8 ditunjukkan arsitektur rangkaian dalam IC L293D. Sinyal PWM diumpankan pada pin 1 (enable1) IC L293D, sehingga pin enable akan selalu berubah menjadi kondisi HIGH atau LOW sebagaimana pulsa PWM yang di unpankan. Pin 2 (IN1) dan pin 7 (IN2) dihubungkan dengan pengatur arah putaran. Misalnya pada pin enable1 diumpankan sinyal HIGH, pada pin2 (IN1) di umpankan sinyal HIGH dan pada pin 7(IN2) diumpankan sinyal LOW maka pada pin OUT1 juga akan berlogika HIGH dan pin OUT2 akan berlogika LOW dan ketika pada pin enable1 diumpankan sinyal Low maka kedua keluaran pin OUT1 dan OUT2 akan menjadi LOW, begitu seterusnya seiring dengan perubahan pin enable1 yang merupakan perubahan PWM.
2.1.5 Sensor Kecepatan (Optokopler)
Masalah utama dalam teknik pengukuran ialah mengubah besaran fisik (dalam hal ini optik) menjadi besaran listrik yang proporsional. Dalam pembuatan alat ini, sensor yang digunakan adalah optokopler. Didalam optokopler, terdapat dioda penghasil cahaya, LED (Light Emitting Diode), dan sebuah transistor yang peka terhadap perubahan intensitas cahaya (photo-transistor). Ini tersedia dalam satu kesatuan atau terpisah dalam masing-masing kotak dan kadang-kadang juga dilengkapi dengan lensa agar dapat mengenali sinyal kecil dengan lebih baik, atau untuk memperoleh jarak pengamatan yang lebih jauh.
Sebagaimana yang ditunjukkan pada Gambar 2.9. yaitu untuk setiap perubahan tegangan Vf, akan menghasilkan perubahan pada LED dan arus yang ditarik oleh photo-transistor akan mengalami perubahan pula, sehingga menyebabkan perubahan tegangan pada terminal kolektor-emitornya (Vce).
Beberapa keuntungan pemakaian dari optokopler ini adalah :
• Kecepatan operasi lebih baik
• Ukurannya kecil
• Tidak mudah terpengaruh oleh goncangan dan getaran
2.1.6 Pemicu Schmitt (IC 7414)
IC 7414 merupakan IC TTL yang berfungsi sebagai penguat tegangan dan menegaskan masukan sinyal yang berupa sinyal bergerigi atau sinus menjadi sinyal kotak yang tegas. IC ini mempunyai 6 gerbang inverteryang masing-masing dengan input Schmitt trigger. Gambar konfigurasi pin-pinnya ditunjukkan pada Gambar 2.10.
2.2 Konsep Dasar Perangkat Lunak
2.2.1 LabVIEW (Laboratory Virtual Instrument Engineering Workbench)
LabVIEW merupakan salah satu dari sekian banyak sarana pemrograman komputer. Seperti halnya sarana pemrograman lainnya LabVIEW dikembangkan untuk perancangan dan rekayasa data sehingga dapat menampilkan dan memproses segala macam fungsi untuk melakukan pemanipulasian terhadap fungsi yang diinginkan. LabVIEW memiliki 2 ruang kerja, pada masing-masing ruang kerja memiliki antarmuka grafik tersendiri. Setiap simbol grafik ini mewakili banyak kata/perintah yang digunakan dalam bahasa teks. Dengan demikian waktu yang diperlukan dalam perancangan program yang dilakukan oleh seorang pemrogram akan menjadi lebih efisien. Salah satu keunggulan dari LabVIEW adalah aliran pemrograman yang dapat diamati proses kerjanya, sehingga jika terjadi kesalahan dalam penggolahan data dapat diketahuui dengan mengamati proses tersebut.
Secara umum program ini dirancang khusus untuk membuat gambaran/simulasi kerja suatu instrumen industri, komunikasi data, akuisisi data, system kendali, perancangan dan perhitungan matematika.
pengolah I/O data. Icon dan connector panel digunakan untuk mengidentifikasikan VI sehingga bisa digunakan untuk VI yang lain.
Beberapa fungsi yang digunakan dalam perancangan program pengendali antara lain ditunjukkan pada Tabel 2.6 hingga Tabel 2.15.
Tabel 2.6. Fungsi Struktur
Gambar fungsi Keterangan
While Loop, akan mengulangi semua objek didalamnya Sampai suatu kondisi logika tertentu. Nilai logika tergantung pada perilaku selanjutnya. Pengulangan dapat dilakukan dengan click terminal yang bersyarat dan memilih berhenti jika benar atau lanjut jika benar dari shortcut menu.
Case Structur memiliki satu atau lebih subdiagram atau kasus, hanya satu kasus saja yang dikerjakan saat struktur ini dieksekusi. Nilai yang terhubungkan dengan terminal pemilih akan menentukan kasus mana yang akan dikerjakan, nilai tersebut dapat bertipe Boolean, string, integer atau enumerate.
Tabel 2.6. (Lanjutan) Fungsi Struktur
Gambar fungsi Keterangan
Foor Loop secara otomatis akan menyimpan beberapa keluaran kedalam suatu larik.For loop memiliki dua parameter yaitu termination count (cacah perhentian-N, berada di sudut kiri atas) yang merupakan cacah total berapa kali kalang “For” dikerjakan sebelum berhenti dan cacah iterasi (i di sudut kiri bawah).
Tabel 2.7. Fungsi Numerik
Gambar Fungsi Keterangan
Add untuk menjumlah masukan x dan y.
Subtract untuk menghitung x-y.
Multiply digunakan untuk mengalikan masukan x dan y.
Increment digunakan untuk menambah nilai 1 untuk masukan.
Quotient & Remainder untuk menghitung hasil pembagian dan sisanya antara x dan y.
Divide untuk membagi masukan x dan y.
Tabel 2.7. (Lanjutan) Fungsi Numerik
Gambar Fungsi Keterangan
Decrement digunakan untuk mengurangi 1 dari nilai masukan
Absolute Value untuk mengembalikan harga mutlak dari masukan.
Tabel 2.8. Fungsi Boolean
Gambar Fungsi Keterangan
Number To Boolean Array digunakan untuk mengkonversi suatu bilangan menjadi larik Boolean.
Boolean To (0,1) digunakan untuk mengkonversi nilai boolean True atau False menjadi 1 atau 0.
And digunakan untuk melakukan operasi AND pada masukan x dan y.
Not untuk menghitung logika masukan, jika x FALSE maka fungsi dikembalikan TRUE, begitu juga sebaliknya.
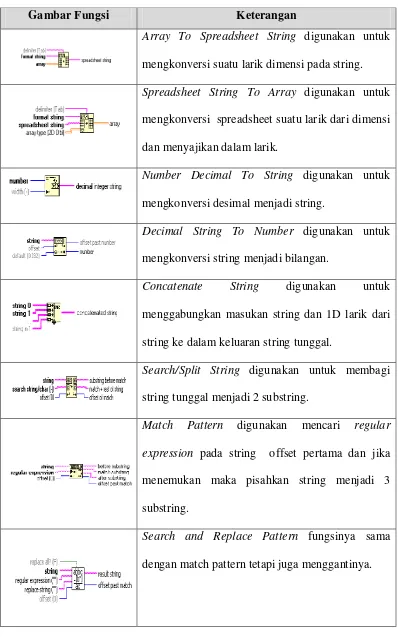
Tabel 2.9. Fungsi String
Gambar Fungsi Keterangan
Array To Spreadsheet String digunakan untuk mengkonversi suatu larik dimensi pada string.
Spreadsheet String To Array digunakan untuk mengkonversi spreadsheet suatu larik dari dimensi dan menyajikan dalam larik.
Number Decimal To String digunakan untuk mengkonversi desimal menjadi string.
Decimal String To Number digunakan untuk mengkonversi string menjadi bilangan.
Concatenate String digunakan untuk menggabungkan masukan string dan 1D larik dari string ke dalam keluaran string tunggal.
Search/Split String digunakan untuk membagi string tunggal menjadi 2 substring.
Match Pattern digunakan mencari regular expression pada string offset pertama dan jika menemukan maka pisahkan string menjadi 3 substring.
Tabel 2.10. Fungsi Larik
Gambar Fungsi Keterangan
Index Array untuk mengembalikan unsur atau sub-larik pada index tertentu.
Delete From Array untuk menghapus suatu unsur atau sub-larik dari n-dim array dan hasil larik yang munculkan di array w/ subset dihapus.
Search 1D Array untuk mencari suatu unsur elemen larik 1D yang dimulai dari indeks start.
Transpose 2D Array untuk menyusun kembali elemen larik 2D, misalnya larik 2D [i,j] menjadi larik[j,i].
Array Size untuk menghitung banyaknya unsur-unsur pada setiap dimensi dari larik.
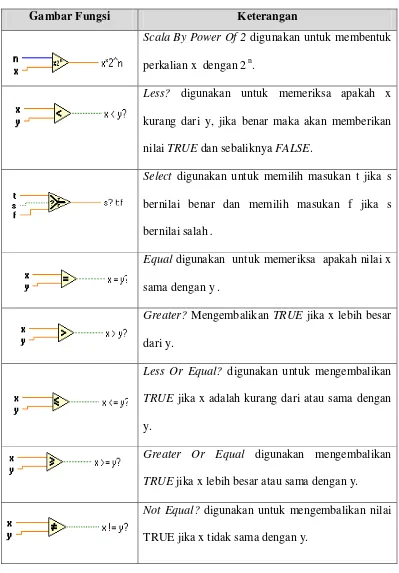
Tabel 2.11. Fungsi Perbandingan
Gambar Fungsi Keterangan
Scala By Power Of 2 digunakan untuk membentuk perkalian x dengan 2 n.
Less? digunakan untuk memeriksa apakah x kurang dari y, jika benar maka akan memberikan nilai TRUE dan sebaliknya FALSE.
Select digunakan untuk memilih masukan t jika s bernilai benar dan memilih masukan f jika s bernilai salah .
Equal digunakan untuk memeriksa apakah nilai x sama dengan y .
Greater? Mengembalikan TRUE jika x lebih besar dari y.
Less Or Equal? digunakan untuk mengembalikan TRUE jika x adalah kurang dari atau sama dengan y.
Greater Or Equal digunakan mengembalikan TRUE jika x lebih besar atau sama dengan y.
Not Equal? digunakan untuk mengembalikan nilai TRUE jika x tidak sama dengan y.
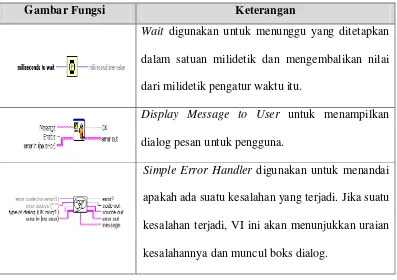
Tabel 2.12. Fungsi waktu dan dialog
Gambar Fungsi Keterangan
Wait digunakan untuk menunggu yang ditetapkan dalam satuan milidetik dan mengembalikan nilai dari milidetik pengatur waktu itu.
Display Message to User untuk menampilkan dialog pesan untuk pengguna.
Simple Error Handler digunakan untuk menandai apakah ada suatu kesalahan yang terjadi. Jika suatu kesalahan terjadi, VI ini akan menunjukkan uraian kesalahannya dan muncul boks dialog.
Tabel 2.13. Fungsi Penanganan Berkas
Gambar Fungsi Keterangan
Read File digunakan untuk membaca data dari berkas yang dibuka .
Close File digunakan untuk menutup suatu berkas yang sudah dibuka .
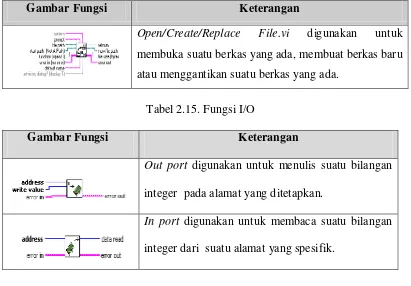
Tabel 2.13 ( Lanjutan) Fungsi Penanganan Berkas
Gambar Fungsi Keterangan
Open/Create/Replace File.vi digunakan untuk membuka suatu berkas yang ada, membuat berkas baru atau menggantikan suatu berkas yang ada.
Tabel 2.15. Fungsi I/O
Gambar Fungsi Keterangan
Out port digunakan untuk menulis suatu bilangan integer pada alamat yang ditetapkan.
BAB III
PERANCANGAN SISTEM DAN PEMROGRAMAN
3.1 Sistem Perangkat Keras (Hardware)
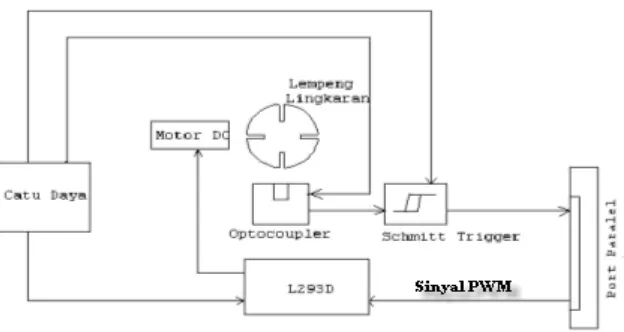
Pada Gambar 3.1 ditunjukkan blok diagram komponen penyusun rangkaian pengendali motor DC menggunakan Lab VIEW 7.1.
Gambar 3.1 Blok diagram rangkaian pengendali Motor DC
Gambar 3.2 Blok diagram keseluruhan pengendalian motor DC menggunakan Lab VIEW 7.1
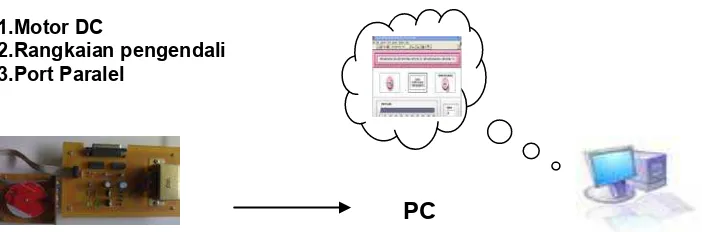
Rangkaian pengendali motor DC ditunjukkan pada Gambar 3.3
Gambar 3.3 Rangkaian pengendali motor DC 1.Motor DC
2.Rangkaian pengendali 3.Port Paralel
Dari blok diagram diatas maka akan dijelaskan satu persatu komponen yang digunakan.
3.1.1 Antarmuka Port Paralel
Port paralel pada komputer mampu memberikan tegangan hingga 5 Volt dan arus maksimal 40mA. Karena daya yang diberikan oleh port paralel tidak mampu untuk menggerakan motor DC dengan baik, maka dibutuhkan suatu rangkaian pengendali untuk menggerakan motor DC tersebut. Untuk menghubungkan dengan port paralel pada komputer maka digunakan DB 25 yang memiliki 25 kaki masukan. Tetapi hanya 4 pin yang akan digunakan yaitu pin 3 dan pin 4 sebagai data masukan untuk IC L239D, pin 13 sebagai status yang dihubungkan dengan optokopler serta pin 18 sebagai Ground (GND).
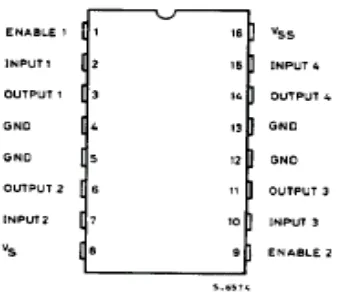
3.1.2 IC L293D Sebagai Pengendali Motor DC
Gambar 3.4 Konfigurasi pin IC L293D (Unitrode) Adapun fungsi pin-pin tersebut dijelaskan sebagai berikut :
a. Pin 1, 9 berfungsi sebagai enable masing-masing motor DC dan merupakan input dari sinyal PWM untuk mengatur kecepatan motor.
b. Pin 2, 7, 10, 15 berfungsi sebagai input IC dan pin ini digunakan untuk menerima sinyal-sinyal kontrol.
c. Pin 3, 6, 11, 14 berfungsi sebagai output IC dan pin-pin ini dihubungkan dengan kutub-kutub motor.
d. Pin 4, 5, 12, 13
Pin-pin tersebut dihubungkan ke ground. e. Pin 8
Berfungsi sebagai sumber tegangan yang sesuai dengan tegangan motor. f. Pin 16
Dihubungkan ke sumber tegangan +5 volt sebagai sumber tegangan dari IC dan sebaliknya sumber tegangan ini terpisah dari motor.
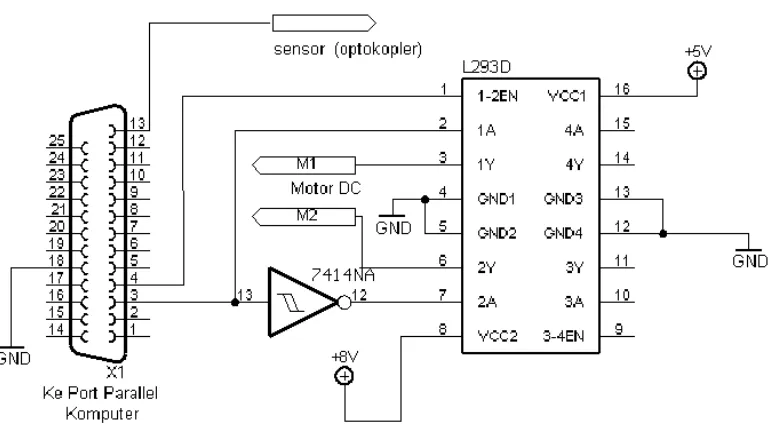
Gambar 3.5. Rangkaian IC L293 sebagai pengendali motor DC
Port paralel digunakan sebagai antarmuka perangkat lunak dan perangkat keras. Pin 3 dan 4 pada port paralel digunakan untuk pengiriman data ke IC L293D. Data pin 4 port paralel akan mengirimkan sinyal PWM ke pin 1 IC L293D (enable) untuk mengatur kecepatan motor DC sedangkan data dari pin 3 port paralel yang dihubungkan ke pin 2 dan pin 7 IC L293D merupakan data untuk mengatur arah putaran motor. Apabila pin1 IC L293 (enable) kondisi HIGH maka motor akan bergerak. Putaran motor akan bergerak ke kanan jika pin 2 = 0 dan pin 7 = 1 sebaliknya putaran motor akan bergerak ke kiri jika pin 2 = 1 dan pin 7 = 0. motor akan berhenti jika enable berkondisi LOW.
3.1.3 Brushed Motor
Jenis motor DC yang digunakan adalah brushed motor EG 530AD-2F. Brushed motor menggunakan rotor berupa lilitan dan statornya berupa magnet permanen sebagaimana yang ditunjukkan pada Gambar 3.6.
Gambar 3.6 Brushed motor
3.14.Rangkaian Pencacah RPM
Rangkaian sensor kecepatan yang berupa pencacah RPM menggunakan optokopler ditunjukkan pada Gambar 3.7.
Gambar 3.7. Rangkaian pencacah RPM
sebagaimana ditunjukkan pada Gambar 3.7 diatas merupakan perpaduan antara LED dengan foto transistor, yaitu sebagai berikut:
• Jika antara foto transistor dan LED dihalangi maka foto transistor akan OFF
sehingga tidak ada arus yang mengalir.
• Sebaliknya jika antara foto transistor dan LED tidak dihalangi maka foto
transistor akan ON sehingga arus bisa mengalir.
Transistor yang digunakan adalah transisitor NPN BC107C yang merupakan
transistor switching (saklar). Penggunaan R2 sebesar 180 Ω yang terhubung dengan
LED indikator, karena secara umum LED membutuhkan arus sekitar 15 - 30 mA, maka dengan tegangan 5 volt dibutuhkan arus sebesar :
I = V I = 5 V/180 Ω
R
= 27 mA
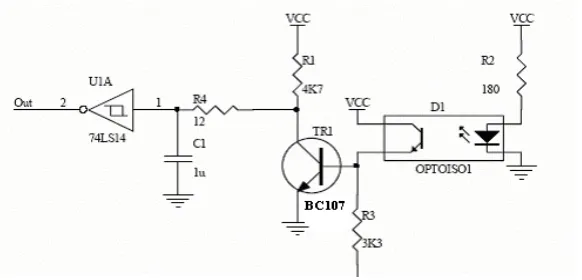
Gambar 3.8 Rangkaian optokopler
Pada Gambar 3.8 ditunjukkan jika transistor tidak terhalang maka kondisi Ib akan jenuh dan RCE sangat kecil dan dianggap 0 sehingga VE =VC =Vcc, dengan demikian Vo(VC) akan sesuai dengan perhitungan berikut:
Volt
dan sat optokopler terhalang maka Vo(VC) akan sesuai dengan perhitungan berikut:
Volt
Gambar 3.9 Rangkaian transistor dan pemicu schmit
=’1’ maka RCE dianggap nol (terhubung singkat) maka tegangan keluaran transistor BC107 Vo (VC) akan sesuai dengan perhitungan berikut:
volt
Jika VB Low=’0’ maka RCE menjadi sangat besar dan dianggap takterhingga (~) maka tegangan keluaran Vo (VC) akan sesuai dengan perhitungan berikut:
volt
Berikutnya Vo ini diumpankan pada bagian schmit trigger untuk membentuk pulsa kotak yang cukup baik untuk di umpankan pada port paralel komputer.
Dengan mengetahui prinsip dari optokopler ini maka harus dibuat penghalang antara transistor dan LED. Ketika berputar keluaran dari foto transistor akan meneruskan atau menghentikan arus. Agar keluaran dari rangkaian tersebut menjadi lebih akurat maka ditambahkan pemicu schmitt (74LS14).
Penghalang dapat berupa lempeng lingkaran yang dilubangi, sensor kecepatan
Gambar 3.10. Posisi mekanis optokopler
3.1.5. Rangkaian Catu Daya
Catu daya utama keseluruhan dari kerja rangkaian ini memberikan tegangan 5 volt DC dan 8 volt DC. Tegangan keluaran ini berasal dari output transformator step down 12 volt AC yang disearahkan oleh 4 buah dioda penyearah dengan metode jembatan sehingga membuat riak keluaran lebih kecil dibandingkan jika hanya menggunakan 2 buah dioda.
Gambar 3.11. Rangkaian catu daya
3.2 Sistem Perangkat Lunak (Software)
Perangkat lunak dalam sistem ini berfungsi untuk menjalankan motor DC sekaligus pengendalian arah putaran dan kecepatan motor DC serta menampilkan hasil dari pengendalian tersebut. Perangkat lunak yang digunakan untuk melakukan pengendalian tersebut adalah LabVIEW 7.1.
Program terdiri dari dua While Loop utama, While Loop pertama sebagai pengatur arah putaran motor, input RPM dan PWM, sedangkan While Loop kedua sebagai pengukur atau penghitung kecepatan motor.
3.2.1 Pengendali Arah Putaran Motor, Kecepatan Motor dan PWM
Gambar 3.12. Diagram Alir Pengendali Arah Putaran, Kecepatan dan PWM
Blok diagram proses pengendali arah putaran motor, kecepatan motor dan PWM ditunjukkan pada Gambar berikut :
Mulai
Arah putar motor kiri
Berikan perintah putaran kekiri dan aktifkan enable IC L293D selama pulsa high PWM
Berikan perintah putaran kekanan dan nonaktifkan enable IC L293D selama pulsa high PWM
Berikan perintah putaran kekanan dan aktifkan enable IC L293D selama pulsa high PWM
Berikan perintah putaran kekiri dan nonaktifkan enable IC L293D selama pulsa high PWM
Selesai
Ya
378 2
500
1 [ 0. . 1] True
PWM SLI DE ARAH PUTARAN
RPM REQUEST PWM
Gambar 3.13. Diagram blok pengendali arah putaran motor, kecepatan motor dan PWM
Dalam perancangan program ini proses kerja dapat disederhanakan kedalam cakupan berikut:
1. Masukan
Masukan pada program ini adalah RPM request dan arah putaran motor (kiri/kanan).
2. Penanganan terhadap nilai masukan
yang berada didalamnya. Jika pilihan arah putaran motor adalah kanan maka case structure akan mengeksekusi pilihan false. Proses ini ditunjukkan pada Gambar 3.15.
378 6
0 [ 0. . 1] False
Gambar 3.14. Diagram blok arah putar motor kanan
Data yang diterima oleh case structure selanjutnya akan diproses secara berurutan oleh sequence structure. Objek berurutan ini ditunjukkan pada Gambar 3.56.
378
6
0 [ 0. . 1]
378
0
500
1 [ 0. . 1]
PWM
Gambar 3.15. Diagram blok sequence pada arah putar motor kanan
Apabila arah putaran motor adalah kiri maka case structure akan mengeksekusi pilihan true. Proses ini ditunjukkan pada Gambar 3.17.
378 2
500
1 [ 0. . 1]
True
Gambar 3.16 Diagram blok arah putar motor kiri
Data yang diterima oleh case structure selanjutnya akan diproses secara berurutan oleh sequence structure. Objek berurutan ini ditunjukkan pada Gambar 3.18.
378 4
0 [ 0. . 1]
378
2
500
1 [ 0. . 1]
PWM
Gambar 3.17 Diagram blok sequence pada arah putar motor kiri
LabVIEW telah menyediakan fasilitas untuk melakukan komunikasi dengan perangkat keras melalui periperal I/O komputer. Yang dapat dilakukan dengan
menggunakan InPort.vi dan OutPort.vi. OutPort.vi akan memberikan logika pada saluran address parallel port sesuai nilai masukan addressnya, dan mengeluarkan data pada saluran data port paralel sesuai nilai yang diberikan pada masukannya. Pada pengendalian kecepatan motor DC ini, menggunakan port paralel dengan alamat (address) $378. Pin –pin pada IC L293 yang terhubung pada port paralel dimasukkan ke write value pada OutPort.vi. Proses difungsikan untuk pengaktifan sinyal pengalamatan pada suatu proses yang diinginkan/diperlukan.
3.2.2 Menghitung Kecepatan Motor
Diagram alir proses pembacaan kecepatan motor ditunjukkan pada Gambar 3.18.
Gambar 3.18. Diagram alir proses pembacaan kecepatan motor
Sebelum melakukan proses menghitung kecepatan motor terlebih dahulu dilakukan proses untuk membaca optokopler. Data yang dibaca berasal dari printer status (PS) dengan alamat $379. Untuk membaca port paralel dengan alamat $379
Mulai
Sensor terkena
Sudah 1 detik Cacah tambah 1
Reset variable cacah
pada LabVIEW digunakan suatu fasilitas yaitu InPort.vi. Hasil pembacaan dari port paralel akan diumpankan oleh InPort.vi ke index array, misalnya pada sequence0 bit ke-empat dari data yang tersimpan pada array dibandingkan dengan nilai “False” yang secara algoritma dapat dinyatakan sebagai pertanyaan “apakah sensor terhalangi atau tidak terkena lubang”. Objek berurutan dari proses kerja membaca optokopler ditunjukkan pada Gambar 3.61.
379
4
0 [ 0. . 1]
379
4
cacah
cacah
1 [ 0. . 1]
Gambar 3.20. Diagram blok baca optokopler
lubang). Pada kondisi berikutnya (sequence1), apabila element index array false (0) berarti sensor belum terkena lubang sehingga hasil pembandingan dengan boolean true (1) bernilai false, hal ini menyebabkan while loop diulang lagi sampai hasil pembandingan bernilai true (sensor terkena lubang berikutnya) atau sudah selama dua detik tidak terkena lubang, jika dalam waktu dua detik sensor tidak terkena lubang maka tidak dilakukan penambahan pada variable cacah. Perhitungan RPD dan RPM dilakukan setiap satu detik. Pewaktu satu detik tersebut dibuat dengan cara menempatkan suatu komponen waktu dalam format string. Diagram alir hitung nilai RPM ditunjukkan pada Gambar 3.21.
Mulai
RPD ← Cacah/8
RPM ← RPD x 60
Selesai
Gambar 3.21. Diagram alir hitung nilai RPM
Blok diagram untuk menghitung nilai RPM ditunjukkan pada Gambar 3.22.
Rumus untuk menghitung kecepatan selama satu detik adalah
karena kecepatan yang diinginkan dalam satuan menit maka dikalikan 60 sehingga rumus untuk menghitung kecepatan selama satu menit adalah
Selanjutnya sequence1 dikerjakan untuk mereset cacah, sebagaimana ditunjukkan pada Gambar 3.23.
BAB IV
HASIL DAN PEMBAHASAN
4.1 Hasil Percobaan
Setelah dilakukan perakitan, kemudian dilakukan pengujian untuk menguji apakah alat yang dirancang sudah berjalan sesuai dengan yang diinginkan. Alat yang dirancang ini, terdiri dari satu perangkat komputer dan rangkaian yang dikendalikan. Rangkaian pengendali dihubungkan ke port paralel pada komputer. Komputer yang dihubungkan dengan rangkaian pengendali akan berfungsi sebagai penambil. Gambar alat pengendali motor DC ditunjukkan pada Gambar 4.1.
Motor yang diukur kecepatannya adalah motor dengan tegangan 8 volt. Untuk mengatur kecepatan motor digunakan metode PWM (Pulse Witdh Modulation). Kecepatan putaran motor akan berubah dengan mengatur nilai PWM. Hasil pengukuran kecepatan motor DC ditunjukkan pada Tabel 4.1.
Tabel 4.1 Tabel perubahan kecepatan terhadap PWM
PWM
KECEPATAN (RPM)
Percobaan 1 Percobaan 2 Percobaan 3 Percobaan 4
0
Berdasarkan hasil pengukuran kecepatan dari table 4.1, maka dapat dibuat grafik pada gambar 4.2, dimana dari grafik tersebut terdapat hubungan antara PWM dan perubahan kecepatan putar motor (RPM). Dari percobaan pertama sampai percobaan ke-empat, PWM diatur maksimal 500 dan minimal 0, saat PWM 0 kecepatan 0 RPM dan saat PWM 50 kecepatannya ± 2040 RPM saat PWM 500 kecepatannya ± 2600 RPM.
Langkah –langkah untuk merequest dan menjalankan alat pengendali rotasi motor adalah :
a. Tekan tombol arah putaran, memilih arah putaran motor yang dikehendaki yaitu kanan atau kiri.
b. Tekan tombol RPM request, client dapat memilih nilai kecepatan yang akan direquest yang secara langsung akan menunjukkan nilai PWM.
c. Tekan Start dan RUN pada program Lab.View 7.1 untuk memulai proses pengendalian.
Gambar 4.3 Tampilan Hasil Request arah putaran kanan
4.1 Pembahasan
Motor DC yang digunakan adalah motor DC dengan tegangan 8 volt. Untuk dapat menggerakkan motor digunakan penggerak H-bridge L293D. L293D adalah IC penggerak yang didalamnya terdapat 2 jembatan H serta dioda untuk melindungi sumber dari efek induksi, berfungsi mengendalikan motor DC. L293D dirancang untuk beroperasi dengan arus hingga 600mA dan tegangan dari 4,5V-36V.
Untuk menghitung kecepatan dari motor DC maka digunakan rangkaian optokopler. Prinsip dari rangkaian optokopler merupakan perpaduan antara LED dengan foto transistor. Jika antara foto transistor dan LED dihalangi maka foto transistor akan OFF sehingga tidak ada arus yang mengalir, sebaliknya jika antara foto transistor dan LED tidak dihalangi maka foto transistor akan ON sehingga arus bisa mengalir. Dengan mengetahui prinsip dari optokopler ini maka harus dibuat penghalang antara transistor dan LED. Ketika berputar keluaran dari foto transistor akan meneruskan atau menghentikan arus.
Gambar 4.5 Lempeng lingkaran
Bagian yang tidak berlubang
Penghalang dapat berupa lempeng lingkaran yang dilubangi, sensor kecepatan akan menghasilkan pulsa high (1) jika mengenai lubang dan jika tidak mengenai lubang maka akan bernilai 0. Saat mengenai lubang maka pada saat itulah cacahan di hitung dalam interval 1 detik.karena yang diinginkan dalam satuan RPM (rotation per minute) maka banyaknya cacahan dalam satu detik dibagi jumlah lubang dan dikalikan 60 (karena dalam menit). Hitungan kecepatan motor dapat disederhankan dengan rumus :
Jumlah lubang yang dibuat akan mempengaruhi kestabilan kecepatan motor. Makin banyak lubang maka pembacaan akan makin sering dan jika dikonversi ke RPM akan didapat hasil yang makin mendekati kondisi aslinya. Hasil pembacaan kecepatan motor tidak stabil dapat disebabkan karena kurangnya kepekaan optokopler (sensitive) dan dapat dipengaruhi oleh lebar lubang pada piringan karena semakin lebar lubang optokopler semakin tidak peka, satu lubang yang lebar bisa dibaca dua lubang sekaligus oleh optokopler.
BAB V
PENUTUP
5.1 Kesimpulan
Berdasarkan hasil perancangan dan pengujian alat yang telah dibuat, maka dapat diambil beberapa kesimpulan sebagai berikut :
1. Jumlah lubang yang dibuat pada lempeng lingkaran akan mempengaruhi kestabilan kecepatan motor.
2. PWM mempengaruhi kecepatan motor, tiap kenaikan PWM, maka semakin cepat motor berotasi
3. Data yang diperoleh dari percobaan menghasilkan grafik yang linier
5.2 Saran
• Pengendalian rotasi motor DC menggunakan LabVIEW 7.1 aplikasinya
dikembangkan menggunakan jaringan.
• Pengendalian rotasi motor DC menggunakan LabVIEW 7.1 diaplikasikan
DAFTAR PUSTAKA
Cooper, William David. 1994. Instrumentasi Elektronik dan Teknik Pengukuran. Erlangga, Jakarta.
Putra, Agfianto Eko. 2002. Teknik Antarmuka Komputer : Konsep dan Aplikasi. Graha Ilmu, Jogjakarta.
Rosenberg, Robert. 1978. Electric Motor Repair : A Practical Book on the Winding, Repair, and Troubleshooting of A-C and D-C Motors and
Controllers. Rinehart Press, San Fransisco. www. Google.com