Robot Pengangkut Box Berdasarkan Perbedaan Warna RGB Berbasis Mikrokontroler
Teks penuh
Gambar



Dokumen terkait
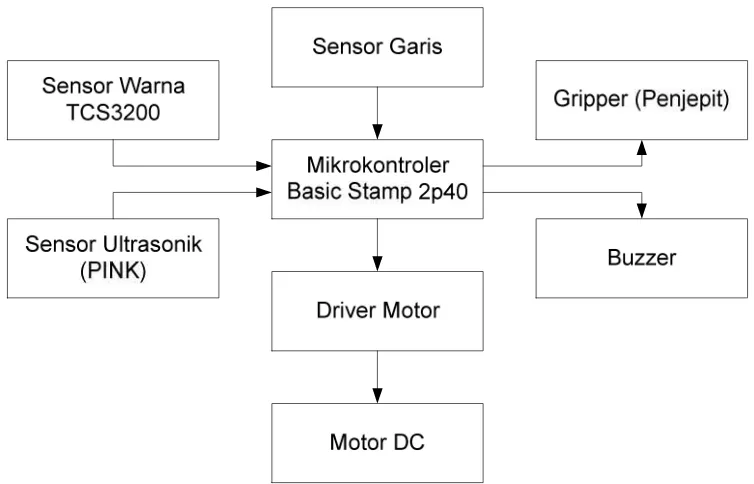
Kontrol utama robot penghindar halangan adalah mikrokontroler yang berfungsi mengatur kinerja dari sensor ultrasonik dan motor DC, pada saat catu daya robot dihidupkan
Alat ini menggunakan beberapa komponen pendukung yang digabungkan dengan mikrokontroler, sehingga dapat berfungsi sebagai pencampur warna, diantaranya saklar untuk memilih warna yang
SENSOR PING PARALLAX SEBAGAI PENGUKUR JARAK PADA ROBOT CERDAS PEMADAM API.. BERBASIS
Robot detektor logam pada ranjau darat berbasis mikrokontroler 328 membutuhkan dua mikrokontroler dimana, satu mikrokontroler digunakan untuk kendali robot, sensor
Lengan robot penyortir benda berdasarkan warna adalah lengan robot yang digunakan untuk melakukan pekerjaan secara otomatis menyortir benda berdasarkan warna merah, hijau
Robot berkaki empat yang dirancang Anggananto menggunakan sistem mikrokontroler ATMega 8535 berfungsi sebagai pengendali utama, sensor ping berfungsi untuk mengukur jarak,
“Perancangan Alat Sortir Buah Jeruk Berdasarkan Warna RGB dengan Mikrokontroler Arduino” [Skripsi] Medan.. Universitas
Kontrol utama robot penghindar halangan adalah mikrokontroler yang berfungsi mengatur kinerja dari sensor ultrasonik dan motor DC, pada saat catu daya robot dihidupkan
