PENGEMBANGAN PERANGKAT LUNAK ANTARMUKA
INSTRUMEN MOTIWALI (
TIDE GAUGE
) UNTUK ANALISIS
DATA PASANG SURUT
HUSNUL KHATIMAH
DEPARTEMEN ILMU DAN TEKNOLOGI KELAUTAN FAKULTAS PERIKANAN DAN ILMU KELAUTAN
INSTITUT PERTANIAN BOGOR BOGOR
PERNYATAAN MENGENAI SKRIPSI DAN
SUMBER INFORMASI SERTA PELIMPAHAN HAK CIPTA
Dengan ini saya menyatakan bahwa skripsi berjudul Pengembangan Perangkat Lunak Antarmuka Instrumen Motiwali (Tide Gauge) untuk Analisis Data Pasut adalah benar karya saya dengan arahan dari komisi pembimbing dan belum diajukan dalam bentuk apa pun kepada perguruan tinggi mana pun. Sumber informasi yang berasal atau dikutip dari karya yang diterbitkan maupun tidak diterbitkan dari penulis lain telah disebutkan dalam teks dan dicantumkan dalam Daftar Pustaka di bagian akhir skripsi ini.
Dengan ini saya melimpahkan hak cipta dari karya tulis saya kepada Institut Pertanian Bogor.
Bogor, Februari 2014
Husnul Khatimah
ABSTRAK
HUSNUL KHATIMAH. Pengembangan Perangkat Lunak Antarmuka Instrumen Motiwali (Tide Gauge) untuk Analisis Data Pasang Surut. Dibimbing oleh INDRA JAYA dan AGUS S. ATMADIPOERA.
Instrumen MOTIWALI adalah alat untuk mengukur perubahan elevasi muka laut berbasis akustik, yang telah berhasil dikembangkan di Laboratorium Instrumentasi Kelautan ITK-IPB. Data hasil perekaman alat ini perlu dianalisis secara detail dengan membuat program untuk menentukan karakteristik komponen pasang-surut (pasut). Tujuan dari penelitian ini adalah untuk mengembangkan program antarmuka (software) yang dapat menganalisis data deret-waktu pasut dengan metode Admiralty, sehingga diperoleh komponen utama pasut serta menampilkan prediksinya. Pengembangan software mencakup empat modul, yaitu modul filter
data untuk melakukan parsing dan pengelompokan data, modul Admiralty untuk analisis data pasut, modul formzahl untuk penentuan tipe pasut, dan modul prediksi pasut. Data yang digunakan untuk uji-analisis software ini adalah data elevasi laut karena pasut hasil perekaman MOTIWALI selama 15 hari di Perairan Pulau Pramuka, Kep. Seribu. Perbandingan nilai amplitude dan fase komponen pasut antara hasil penelitian ini dengan data Dishidros, serta metode harmonik least-squared diperoleh nilai galat kuadrat terkecil (RMSE) sebesar 1.89 cm dan 102.27°, yang berarti akurasi hasil analisis dengan software ini cukup tinggi. Jenis pasut di lokasi studi adalah harian tunggal (F=4.43), yang sesuai dengan penelitian sebelumnya. Modul prediksi fluktuasi pasut menampilkan hasil prediksi pasut yang memberikan informasi bermanfaat bagi aktivitas di kawasan studi.
ABSTRACT
HUSNUL KHATIMAH. Software Development for Tidal Constituents Analysis. Supervised by INDRA JAYA and AGUS S. ATMADIPOERA.
MOTIWALI is a water level instrument based on acoustic that has been created at the Marine Instrumentation Laboratory of ITK-IPB. The data recording need detail analyze by a program to detemine constituent of tide characteristicc. The objective this study is developing interface program (software) for tidal analisys with Admiralty methode. This Admiralty-based method program computes 9 tidal constituents, determines Formzahl tidal types, and predicts tidal time-series for particular time-length. The Matlab-based program scripts consist of four modules: the pre-processing module for parsing, filtering and data averaging; the Admiralty module for tidal constituents analysis, the Formzahl module for tidal types determination; and prediction module for tidal prediction. The 15-day sea-surface elevation time series data from Pramuka Island - Seribu Islands Jakarta have been used to examine the performance of the software. The result shows that the amplitude and phase difference obtained from this software and Dishidros tidal table (also with least-squared t-tide method) was very small (RMSE: 1.89 cm and 102°). This means that accuracy of calculation are quite consistent. Furthermore, diurnal tidal type (Formzahl number, F=4.43) obtained from this analysis was in good agreement with previous studies. Tidal prediction module provides beneficial information for marine activities around the region.
Skripsi
sebagai salah satu syarat untuk memperoleh gelar Sarjana Ilmu Kelautan
pada
Departemen Ilmu dan Teknologi Kelautan
PENGEMBANGAN PERANGKAT LUNAK ANTARMUKA
INSTRUMEN MOTIWALI (
TIDE GAUGE
) UNTUK ANALISIS
DATA PASANG SURUT
HUSNUL KHATIMAH
DEPARTEMEN ILMU DAN TEKNOLOGI KELAUTAN FAKULTAS PERIKANAN DAN ILMU KELAUTAN
INSTITUT PERTANIAN BOGOR BOGOR
Judul Skripsi : Pengembangan Perangkat Lunak Antarmuka Instrumen Motiwali (Tide Gauge) untuk Analisis Data Pasang Surut
Nama : Husnul Khatimah NIM : C54090014
Disetujui oleh
Prof. Dr. Ir. Indra Jaya, M. Sc Pembimbing I
Dr. Ir. Agus S. Atmadipoera, DESS Pembimbing II
Diketahui oleh
Dr Ir I Wayan Nurjaya, M. Sc Ketua Departemen
PRAKATA
Puji dan syukur penulis panjatkan kepada Allah Subhanahu Wa Ta’ala
karena atas segala karunia-Nya sehingga penulis mampu menyeleasaikan skripsi yang berjudul “Pengembangan Perangkat Lunak Antarmuka Instrumen Motiwali (Tide Gauge) untuk Analisis Data Pasut dengan baik. Terima kasih penulis ucapkan kepada :
1. Bapak Prof. Dr. Indra Jaya, M.Sc dan Bapak Dr Agus S. Atmadipoera, DESS selaku pembimbing skripsi atas masukan, saran, arahan dan motivasinya sehingga terselesaikan skripsi ini.
2. Bapak Prof. Dr. Ir. Mulia Purba, M.Sc selaku penguji sidang serta Bapak Dr. Ir. Jonson Lumban Gaol, M.Sc selaku Gugus Kendali Mutu atas masukan, saran serta bimbingan sehingga terselesaikan skripsi ini
3. Seluruh staf pendidik dan kependidikan Departemen Ilmu dan Teknologi Kelautan, FPIK-IPB atas arahan, bimbingan dan bantuan selama menjalani kuliah.
4. M. Iqbal, M. Si atas semua ilmu, masukan, motivasi dan bimbingannya dalam penyelesaian skripsi.
5. Kedua Orang tua tercinta, Hadariadi dan Ainur Rahimah, adik, serta segenap keluarga besar M. Ibrahim atas segala do‟a, dukungan, semangat, serta kasih sayangnya.
6. Segenap warga „Bengkel‟ Workshop Akustik dan Instrumentasi Kelautan, Efin Muttaqin, Erik Munandar, Rizqi Rizaldi H, Isnaini Prihatiningsih, Khasanah Dwi Astuti, Nando Ade Amarylly P, Muhammad Idris, Ayudiah Ningtyas, Fadhila Anisa A R, M. Rakif Panguale, Marine Instrumentation and Telemetry (MIT) Club diklat 01 dan 02 yang telah banyak membantu selama pengumpulan data dan penulisan.
7. Segenap penghuni Laboratorium Oseanografi Fisika atas pengalaman dan kebersamaannya.
8. Teman dan sahabat tercinta CRAZIER ITK 46, GASISMA 46, Ivan Setiawan, Putri Maharani, Wida Nindita, Hosnol Hotimah, Fauziah Nur, Noeryda Pramudyta, Raissa, dan Fahmi Rosdiana atas bantuan, motivasi, doa dan pelajarannya.
Semoga karya ilmiah ini bermanfaat.
Bogor, Februari 2014
DAFTAR ISI
DAFTAR TABEL vi
DAFTAR GAMBAR vi
DAFTAR LAMPIRAN vi
PENDAHULUAN 1
Latar Belakang 1
Tujuan Penelitian 2
METODE 2
Waktu dan Tempat Penelitian 2
Alat dan Data 2
Sistem Kerja Instrumen MOTIWALI 2
Skema Kerja Pembuatan Aplikasi 4
Analisis Filtering Data 5
Modul Analisis Harmonik Pasang Surut Metode Admiralty 5
Penentuan Jenis Pasut 9
Prediksi Pasut 10
Validasi Data Pasut 10
HASIL DAN PEMBAHASAN 11
Tampilan Interface MOTIWALI 11
Modul Filtering Data 12
Modul Admiralty 16
Modul Prediksi Pasang Surut 25
Validasi Data 27
SIMPULAN DAN SARAN 28
Simpulan 28
Saran 28
DAFTAR PUSTAKA 29
LAMPIRAN 31
DAFTAR TABEL
1 Sembilan komponen harmonik pasut 6
2 Klasifikasi dari tipe pasut berdasarkan bilangan Formzahl 10 3 Hasil penghitungan 9 konstanta pasut dengan APTideSoft 24 4 Perbandingan nilai konstanta pasut menggunakan toolbox t-tide dengan
interface MOTIWALI 27
DAFTAR GAMBAR
1 Desain penuh instrumen MOTIWALI 3
2 Desain box utama (kiri) dan desain box transducer (kanan) 3 3 Contoh format data MOTIWALI dalam file CONFIG.INI 4
4 Alur kerja pembuatan interface MOTIWALI 4
5 Desain interface MOTIWALI 11
6 Hasil filter data oleh Modul filtering 13
DAFTAR BOX
1 Bagian pertama modul filtering data 12
2 Bagian kedua dari modul filtering data 12
3 Bagian ketiga modul parsing data 13
4 Bagian keempat modul parsing data 13
5 Bagian kelima modul filtering data 14
6 Bagian terakhir dari modul filtering data 15
7 Bagian baris pertama modul admiralty 16
8 Bagian kedua modul admiralty 17
9 Bagian keempat modul admiralty 17
10 Langkah pertama pada bagian keempat modul admiraty 18 11 Langkah kedua pada bagian keempat modul admiralty 18 12 Langkah ketiga pada bagian keempat modul admiralty 18 13 Langkah keempat pada bagian keempat modul admiralty 19 14 Langkah terakhir dari bagian keempat modul admiralty 19
15 Bagian kelima modul admiralty 20
16 Bagian ketujuh modul admiralty 20
17 Tahap pertama pada bagian ketujuh modul admiralty 21
18 Bagian kedelapan modul admiralty 21
19 Bagian kesembilan modul admiralty 22
20 Bagian kesepuluh modul admiralty 22
21 Bagian terakhir modul admiralty 23
22 Bagian pertama dari modul prediksi pasut 25
23 Bagian kedua dari modul prediksi pasut 26
24 Bagian ketiga dari modul prediksi pasut 26
25 Bagian terakhir dari modul prediksi pasut 26
DAFTAR LAMPIRAN
1 Tabel Harga Konstanta Pengali pada perhitungan skema 2 31 2 Tabel Harga Konstanta Pengali kedua dan Bilangan Pengali pertama
pada Skema 4 32
3 Tabel Harga Bilangan Pengali 2 untuk Skema 5 dan 6 33
4 Tabel Harga w, W dan (1+W) 34
PENDAHULUAN
Latar Belakang
Fenomena pasang dapat diartikan sebagai naik turunnya muka laut secara berkala akibat adanya gaya tarik benda-benda angkasa terutama matahari dan bulan terhadap massa air di bumi (Pariwono 1989). Adanya data pasut merupakan hal yang sangat penting diketahui untuk menunjang berbagai macam kegiatan pelayaran dan perikanan di Indonesia. Oleh karena itu banyak pula berbagai macam cara pengukuran data pasut yang telah dikembangkan, mulai dari cara manual seperti Floating Tide Gauge, Pressure Tide Gauge dan rambu pasut (Ongkosono dan Suyarso 1989), berdasarkan satelit altimetri seperti satelit TOPEX/POSEIDON (Heliani et al. 2002) serta yang sudah dikembangkan menggunakan teknologi akustik dan sistem elektronik yaitu dengan menggunakan MOTIWALI (Mobile Tide and Water Level Instrument) (Iqbal dan Jaya 2011)
MOTIWALI yang telah dikembangkan di Laboratorium Instrumentasi Kelautan IPB merupakan suatu instrumen alat ukur pasut dengan menggunakan sensor ultrasonik yang bersifat portable atau dapat berpindah-pindah maupun tetap dengan kemampuan tambahan seperti transmisi data menggunakan GSM atau frekuensi radio sehingga dapat dipantau dari jauh. Penggunaan sensor ultasonik dalam instrumen ini berupa transducer akustik 40 kHz sebagai sensor pengukur jarak antara sensor dengan permukaan air serta dilengkapi dengan sensor suhu sebagai pengoreksi data (Iqbal dan Jaya 2011). Pengembangan instrumen ini dilakukan untuk memudahkan para peneliti dalam pengukuran pasut secara langsung (realtime) dan efisien karena dilengkapi dengan penyimpanan data menggunakan perekam (memory card) sehingga mengurangi terjadinya kehilangan data.
Pengolahan data pasut dari instrumen MOTIWALI selama ini hanya dilakukan secara manual, mulai dari parsing, filter dan menggambarkan grafik menggunakan perintah di MATLAB ataupun menggunakan program Microsoft Excel. Selain itu juga belum ada yang menganalisis data MOTIWALI secara lanjut hingga mengahasilkan kostanta pasut sehingga data dari MOTIWALI belum bisa digunakan untuk prediksi pasut. Adapun analisa harmonik pasut dapat dilakukan dengan beberapa metode, seperti metode Admiralty dan analisa Harmonik Least Square (Rufaida 2008). Analisa harmonik metode Admiralty lebih banyak mengggunakan tabel Admiralty yang sudah diformulasikan dalam
Microsoft Excel namun belum ada program antarmuka atau tools program yang berbasis metode Admiralty. Berbeda dengan analisa harmonik dengan metode
Least Square yang sudah diformulasikan dalam tools program di MATLAB maupun di Fortran (Prasetyo 2008). Hasil penentuan konstanta pssang surut yaitu amplitudo dan phase komponen pasut ini yang kemudian dapat menentukan elevasi pasut perkiraan di suatu tempat dimana data awal di ambil namun pada waktu sembarang atau tidak tertentu (Ali et al. 1994)
2
dikemukaan di atas bahwa Laboratorium Instrumentasi Kelautan IPB telah mengembangkan MOTIWALI, namun sampai saat ini belum dibuat program antarmuka untuk menganalisis data hasil rekaman MOTIWALI lebih lanjut. Oleh karena itu, dalam skripsi ini dikembangkan program antarmuka yang diharapkan dapat memberikan kemudahan dalam pengolahan data pasut khususnya data yang dihasilkan oleh instrumen MOTIWALI dengan metode admiralty dan yang kemudian bisa dilakukan prediksi atau peramalam pasut berdasarkan konstanta pasut yang telah dihasilkan.
Tujuan Penelitian
1. Membangun sistem pengolahan dan analisis data pasut dari instrumen MOTIWALI dengan menggunakan MATLAB
2. Menganalasis data pasut sehingga menghasilkan 9 (sembilan) komponen pasut utama guna memperkirakan pasut berdasarkan komponen pasut yang dihasilkan
METODE
Waktu dan Tempat
Pengembangan program antarmuka dilakukan selama 5 bulan dimulai pada bulan April sampai bulan Agustus 2013. Pembuatan sistem pengolahan dan analisis data pasut bertempat di Workshop Akustik dan Instrumentasi Kelautan Departemen Ilmu dan Teknologi Kelautan Fakultas Perikanan dan Ilmu Kelautan, Institut Pertanian Bogor. Pengambilan data pasut dari MOTIWALI dilakukan pada tanggal 1 Mei 2013 – 15 Mei 2013 di Pulau Pramuka, Kepulauan Seribu, DKI Jakarta.
Alat dan Data
Alat yang digunakan adalah seperangkat komputer dilengkapi dengan perangkat lunak MATLAB 2010, program Microsoft Excel, seperangkat instrument MOTIWALI dan tabel admiralty. Adapun data penelitian berupa hasil rekam data dari instrumen MOTIWALI.
Sistem Kerja Instrumen MOTIWALI
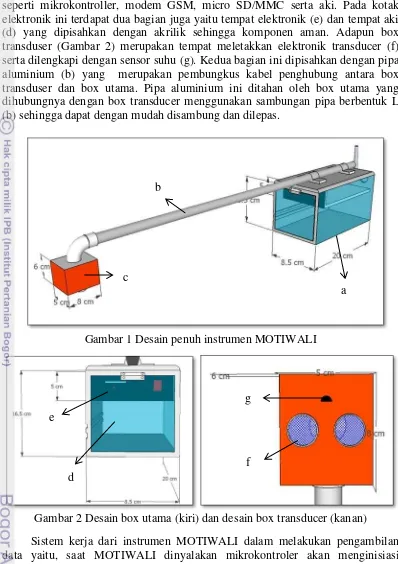
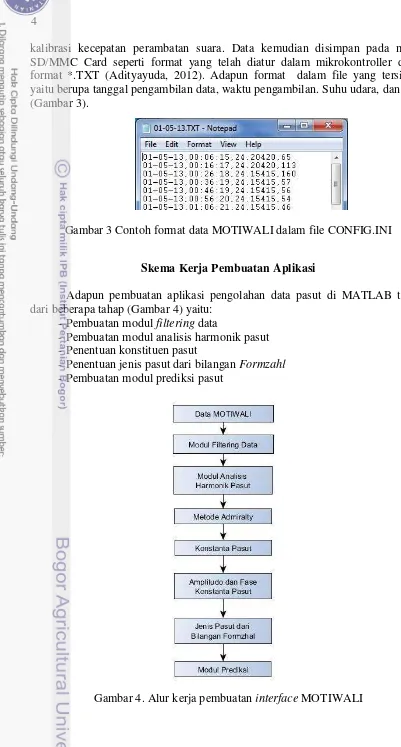
3 seperti mikrokontroller, modem GSM, micro SD/MMC serta aki. Pada kotak elektronik ini terdapat dua bagian juga yaitu tempat elektronik (e) dan tempat aki (d) yang dipisahkan dengan akrilik sehingga komponen aman. Adapun box transduser (Gambar 2) merupakan tempat meletakkan elektronik transducer (f) serta dilengkapi dengan sensor suhu (g). Kedua bagian ini dipisahkan dengan pipa aluminium (b) yang merupakan pembungkus kabel penghubung antara box transduser dan box utama. Pipa aluminium ini ditahan oleh box utama yang dihubungnya dengan box transducer menggunakan sambungan pipa berbentuk L (b) sehingga dapat dengan mudah disambung dan dilepas.
Gambar 1 Desain penuh instrumen MOTIWALI
Gambar 2 Desain box utama (kiri) dan desain box transducer (kanan) Sistem kerja dari instrumen MOTIWALI dalam melakukan pengambilan data yaitu, saat MOTIWALI dinyalakan mikrokontroler akan menginisiasi keberadaan MMC/SD Card sensor ultrasonik dan sensor suhu. Jika deteksi jarak yang dilakukan mikrokontroller berhasil, maka mikrokontroller akan membaca file CONFIG.INI yang berisi variabel waktu penyimpanan, transmit data, waktu transmit, alarm, tipe alarm, jarak alarm, dan nomer hp yang dituju. Transmit sinyal pada transduser dalam mengambil data jarak kemudian dilakukan hingga mendapat sinyal balik dan mengukur waktu tunda tersebut (time delay). Pada saat yang sama, dilakukan pembacaan sensor suhu yang nantinya digunakan untuk
g
f e
d
c
4
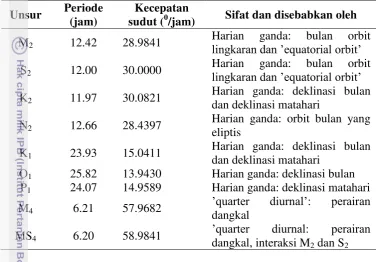
kalibrasi kecepatan perambatan suara. Data kemudian disimpan pada modul SD/MMC Card seperti format yang telah diatur dalam mikrokontroller dalam format *.TXT (Adityayuda, 2012). Adapun format dalam file yang tersimpat yaitu berupa tanggal pengambilan data, waktu pengambilan. Suhu udara, dan jarak (Gambar 3).
Gambar 3 Contoh format data MOTIWALI dalam file CONFIG.INI
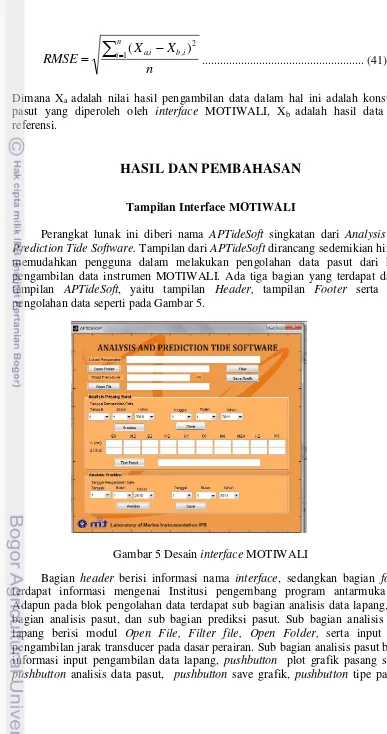
Skema Kerja Pembuatan Aplikasi
Adapun pembuatan aplikasi pengolahan data pasut di MATLAB terdiri dari beberapa tahap (Gambar 4) yaitu:
- Pembuatan modul filtering data
- Pembuatan modul analisis harmonik pasut - Penentuan konstituen pasut
- Penentuan jenis pasut dari bilangan Formzahl
- Pembuatan modul prediksi pasut
5
Analisis Filtering Data
Pembuatan modul filtering data ditujukan untuk melakukan filter data dari data hasil pengambilan intrumen MOTIWALI yang terbentuk dari beberapa file menjadi dalam satu file baru. Sebelum melewati modul filter data, data hasil rekam instrumen MOTIWALI yang telah disimpan dalam satu folder harus diinput terlebih dahulu. Alur kerja modul filter data dalam melakukan filter yaitu dibagi menjadi lima tahap. Tahap pertama adalah membuka semua file data yang telah diinput, dan menggabungkan seluruh file data MOTIWALI yang tersimpan menjadi satu, tahap kedua adalah menseleksi data yang kosong dan melakukan interpolasi, tahap ketiga adalah menyusun data yang telah diseleksi, tahap keempat adalah merata-ratakan data jarak menjadi data perjam, tahap kelima adalah menyimpan data yang telah di filter kedalam file baru dalam bentuk format *.csv.
Selain diperoleh data baru, kemudian data baru yang didapat dari pengukuran menggunakan MOTIWALI, baik jarak maupun suhu, ditapis (filter) menggunakan metode moving average filtering. Filtering atau penapisan merupakan cara untuk memperhalus suatu data yang berfluktuasi sehingga dapat diketahui trend dari data tersebut. Moving average merupakan metode untuk merata-ratakan data yang dekat dengan data yang jauh tetapi masih berhubungan (Riley dan Lutgen 1999). Secara umum moving average dapat ditulis dengan persamaan berdasarkan Gencay dan Stengos (1998) sebagai berikut :
... (1) Dimana M A adalah moving average, n adalah periode waktu dalam hal ini yaitu dari waktu ke-0 dan t adalah nilai-nilai yang akan dijumlahkan berdasarkan periode waktu.
Analisis Harmonik Pasut Metode Admiralty
Penentuan konstanta pasut dalam hal ini, yaitu menggunakan metode Admiralty yang dikembangkan oleh Doodson pada tahun 1921. Kelebihan utama metode ini yaitu dapat menganalisis data pasut dalam jangka waktu pendek (29 hari, 15 hari, 7 hari, dan data 1 hari). Prinsip dasar perhitungan pasut dengan menggunakan metode ini yaitu dengan tabel-tabel untuk mempermudah perhitungan, karena pada saat itu perhitungan dilakukan dengan menngunakan tangan (Sjachulie 1999)
6
seperti pada proses harian dan bulanan. Hasil perhitungan dengan menggunakan metode admiralty relatif sedikit yaitu 9 komponen pasut utama (Tabel 1) yaitu M2, S2, K2, N2, O1, K1, P1, MS4, dan M4 (Sjachulie 1999)
Tabel 1. Sembilan komponen harmonik pasut (Hidayat 2010)
Unsur Periode
(jam)
Kecepatan
sudut (0/jam) Sifat dan disebabkan oleh
M2 12.42 28.9841
Harian ganda: deklinasi bulan dan deklinasi matahari
N2 12.66 28.4397
Harian ganda: orbit bulan yang eliptis
K1 23.93 15.0411
Harian ganda: deklinasi bulan dan deklinasi matahari
O1 25.82 13.9430 Harian ganda: deklinasi bulan
P1 24.07 14.9589 Harian ganda: deklinasi matahari
M4 6.21 57.9682 ‟quarter dangkal diurnal‟: perairan
MS4 6.20 58.9841 ‟quarter diurnal: perairan
dangkal, interaksi M2 dan S2
Data yang dihasilkan dari hasil pengukuran pasut kemudian dilakukan koreksi data untuk kemudian akan dilakukan penghitungan data sehingga dihasilkan 9 komponen pasut. Mekanisme penentuan konstanta pasut dari data hasil rekam melalui beberapa skema dengan bantuan tabel-tabel dari perhitungan metode Admiralty. Secara garis besar hitungan dengan menggunkan metode Admiralty adalah sebagai berikut:
1. Penyusunan Skema 1
Pada penyusunan skema ini ditentukan pertengahan pengamatan, bacaan tertinggi dan terendah. Bacaan tertinggi menunjukkan kedudukan air tertinggi dan bacaan terendah menunjukkan kedudukan air terendah.
2. Penyusunan Skema 2
Ditentukan bacaan positif (+) dan negatif (-) untuk kolom X1, Y1, X2, Y2,
X4 dan Y4 dalam setiap hari pengamatan. Besaran positif (+) dan negatif (-)
dari suatu konstanta pada saat tertentu diperoleh dengan mengalikan besaran untuk konstanta tersebut pada tabel konstanta pengali 1. Sebagai kontrol hitungan, jumlahkan nilai (+) dan (-) dari tiap pengamatan untuk X1, Y1, X2,
Y2, dan Y4 sehingga jumlahnya sama dengan jumlah data per jam dalam tiap
7 dan Y4 pada kelompok hitungan 2 dengan memperhatikan tanda (+) dan (-)
harus ditambah dengan besaran B (bilangan kelipatan 100 atau kelipatan 1000).
dapat dicari dengan menggunakan bantuan Tabel konstanta pengali kedua yang berdasarkan pada lamanya pengamatan, 29 atau 15 piantan.
5. Penyusunan Skema 5
Penyusunan skema ini sudah memperhatikan sembilan unsur utama pembangkit pasut (M2, S2, K2, N2, K1, O1, P1, M4 dan MS4). Untuk
penyusunan skema 5 adalah mencari nilai X00, X10, selisih X12 dan Y1b, selisih
X13 dan Y1c, X20, selisih X22 dan Y2b, selisih X23 dan Y2c, selisih X42 dan Y4b
dan selisih X44 dan Y4d. Penyususnan skema ini menggunakan bantuan pada
tabel bilangan pengali. 6. Penyusuanan Skema 6
Untuk perhitungan kelompok hitungan 6 mencari nilai Y10, jumlah Y12 dan
X1b, jumlah Y13 dan X1c Y20, jumlah Y22 dan X2b, jumlah Y23 dan X2c, jumlah
Y42 dan X4d dan jumlah Y44 dan X4d. Penyususnan skema ini menggunakan
bantuan pada tabel bilangan pengali. 7. Kelompok hitungan 7 dan 8
Menentukan besarnya , , menentukan besaran p, besaran f, menentukan nilai V untuk tiap unsur utama pembangkit pasut (M2, S2, K2, N2,
K1, O1, P1, M4 dan MS4), menentukan nilai u dan nilai p serta nilai r.
a. Menghitung besarnya dan
Besaran dan untuk setiap konstanta dihitung melalui skema 5 dan 6 dimana perhitungan dilaksanakan dengan menjumlah besaran-besaran yang dihasilkan oleh skema 5 untuk dan skema
6 untuk .
b. Menghitung besarnya PR
Besarnya PR untuk setiap konstanta dihitung melalui persamaan : ... (2) c. Menentukan besaran p
Besaran p merupakan suatu ketentuan dimana untu penghitungan 15 piantan besaran p untuk setiap konstanta yaitu 360, 175, 214, 166, 217, 177, 273, 280.
d. Menentukan besaran f dan u
Mula-mula dilakukan penghituga harga empat parameter orbital yaitu s, h, p dan N pada hari tengah, dimana parameter orbital ini merepsentasikan posisi bulan dan matahari dalam bola langit yang memengaruhi pola pasang surut dan setiap orbital menghasilkan komponen pasut yang berbeda. Adapun nilai absolut masing-masig orbital pada jam 00.00 hari ke D tahun ke-Y adalah:
8 dimana T adalah waktu yang dinyatakan dalam satuan abad (36525 hari surya rata-rata), dihitung dari waktu asal yakni jam 00.00 GMT tanggal 1 Januari 1900, sehingga T dapat dinyatakan:
... (8) dimana i = jumlah tahun kabisat dari tahun 1900 sampai tahun Y
= int ((Y-1901)/4)
D = jumlah hari dari tanggal 1 Januari
Berdasarkan rumus diatas, maka besarnya parameter f dapat
sedangkan besarnya parameter u dapat dihitung dengan persamaan: uS2 = 0 ...(17) Grenwich pada jam 00.00 pada tanggal tengah pengamatan. Parameter V juga dihitung dari kombinasi parameter orbital bulan dan matahari, sehingga nilai V dapat dihitung berdasarkan persamaan:
9 f. Menentukan nilai p
Nilai p ditentukan dari ketetapan berdasarkan jumlah piantan yang diukur. Untuk 15 hari nilai p untuk setiap konstanta yaitu 333, 345, 327, 173, 160, 307, 318
g. Menentukan besaran g
Penentuan besaran g yaitu berdasarkan persamaaan :
g = V + u + w + p + r ...(32) h. Menentukan kelipatan dari 3600
Penentuan kelipatan 360 dalam hal ini yaitu menentukan kelipatan dari 3600 terhadap harga g.
i. Menentukan amplitudo (A) dan beda fase (g0)
Penentuan A (kecuali untuk S0, M2, K2 dan P1) dengan persamaan :
A = PR : (p x f x (1+W)) ...(33) Sedangkan untuk S0, M2, K2 dan P1 yaitu berlaku persamaan berikut :
A(S0) = PR (S0) : P(S0) ... (34) A(M2) = PR (M2) : P(M2) ... (35) A(K2) = A(S2) x 0.27 ... (36) A(P1) = A(K1) x 0.33 ... (37) Penentuan besarnya go ditentukan melalui perhitungan:
go = g (yang dihitung dari 0) – (kelipatan 360) ... (38) = hasil yang ditentukan dibulatkan
Penentuan Jenis Pasut
Tipe pasut di suatu perairan dapat diketahui dari hasil analisis harmonik yang didapat menggunakan persamaan bilangan Formzahl (Pugh 1987).
... (39)
dimana merupakan konstanta K1 (Luni-solar diurnal), merupakan
konstanta O1 (prinsip lunar diurnal), merupakan konstanta M2 (prinsip
lunar)dan merupakan konstanta S2 (prinsip solar)(Pariwono 1987)
10
Tabel 2. Klasifikasi dari tipe pasut berdasarkan bilangan Formzahl
Bilangan Formzahl Tipe Pasut
0 sampai 0.25 0.25 sampai 1.50 1.50 sampai 3.00 lebih besar dari 3.00
Pasut ganda (semidiurnal) Pasut campuran cenderung ganda
(mixed, mainly semidiurnal) Pasut campuran cenderung tunggal
(mixed, mainly diurnal) Pasut tunggal (diurnal)
Prediksi Pasut
Berdasarkan dari penghitungan konstanta pasut pada modul Admiralty, maka dapat dilakukan prediksi pasut dengan mencari variasi muka laut dari suatu tempat. Prediksi pasut dapat digunakan dengan menjumlahkan beberapa konstanta pasut yang terlibat (Parker 2007). Adapun persamaan tinggi muka air pada waktu
tn berdasarkan Emery (1998) adalah seperti berikut:
... (40)
dimana adalah elevasi muka air pada waktu ke-tn (meter), M adalah jumlah
komponen pasut pembentuk superposisi, adalah rata-rata muka air (meter), fq
adalah frekuensi dari gelombang tiap komponen pasut, ai adalah sudut konstituen
ke-n (derajat/jam), tn adalah waktu peramalan (jam), adalah amplitudo
konstituen ke-n (meter), adalah phase gelombang komponen ke-n (derajat).
Validasi Data Pasut
Validasi data digunakan untuk mengukur tingkat kecermatan suatu data agar terbentuk data yang tepat dan akurat. Teknik validasi data sendiri terdapat beragam cara dan perlakuannya, hal ini dilakukan agar di dalam analisa terhadap suatu variabel dapat dilakukan dengan mudah dan terkontrol (Trijono 2001). Sejauh ini program yang dikembangkan untuk menghasilkan konstanta pasut penting adalah tabel Admiralty yang disusun dalam tabulasi Microsoft Excel serta program t – tides dengan metode least square.
11
n X X RMSE
n
i ai bi
1
2 ,
, )
(
... (41)
Dimana Xa adalah nilai hasil pengambilan data dalam hal ini adalah konstanta
pasut yang diperoleh oleh interface MOTIWALI, Xb adalah hasil data dari
referensi.
HASIL DAN PEMBAHASAN
Tampilan Interface MOTIWALI
Perangkat lunak ini diberi nama APTideSoft singkatan dari Analysis and Prediction Tide Software. Tampilan dari APTideSoft dirancang sedemikian hingga memudahkan pengguna dalam melakukan pengolahan data pasut dari hasil pengambilan data instrumen MOTIWALI. Ada tiga bagian yang terdapat dalam tampilan APTideSoft, yaitu tampilan Header, tampilan Footer serta blok pengolahan data seperti pada Gambar 5.
Gambar 5 Desain interface MOTIWALI
Bagian header berisi informasi nama interface, sedangkan bagian footer
terdapat informasi mengenai Institusi pengembang program antarmuka ini. Adapun pada blok pengolahan data terdapat sub bagian analisis data lapang, sub bagian analisis pasut, dan sub bagian prediksi pasut. Sub bagian analisis data lapang berisi modul Open File, Filter file, Open Folder, serta input data pengambilan jarak transducer pada dasar perairan. Sub bagian analisis pasut berisi informasi input pengambilan data lapang, pushbutton plot grafik pasang suurt,
12
surut serta informasi mengenai konstanta pasut sebagai hasil analisis data pasut. Terakhir, sub bagian prediksi pasut berisi input pengambilan data lapang yang akan diprediksi, pushbutton plot grafik pasang surut dan pushbutton analisis data pasut.
Modul Filtering Data
Bagian pertama dari modul filtering data yaitu perintah mengambil data dari folder penyimpanan dimana pengambilan data menggunakan perintah strcat. Sebelumnya untuk masuk ke folder yaitu dengan perintah cd, sedangkan untuk membuka semua file yang ada dalam folder dengan format *.txt yaitu dengan perintah fopen (Box 1).
Box 1. Bagian pertama modul filtering data
Bagian kedua dari modul filtering yaitu, parsing data. Parsing data yang dibuat menggunakan perintah textscan. pada perintah ini dapat ditentukan tipe data yang akan diparsing dan delimiter berupa koma.
Box 2. Bagian kedua dari modul filtering data
Bagian ketiga yaitu menginterpolasi data yang hilang karena tidak berhasil tersimpan dalam MMC Card. Dalam hal ini interpolasi data dilakukan dengan menggunakan perintah interp1 (Box 3), sehingga data yang hilang diisi dengan hasil interpolasi (Gambar 6). Kemudian setelah sortir data dilakukan, maka data jam pengambilan data diparsing berdasarkan komponen jam, menit, dan detik dengan menggunakan perintah Kemudian setelah sortir data dilakukan, maka data jam pengambilan data diparsing berdasarkan komponen jam, menit, dan detik dengan menggunakan perintah strtok (Box 3).
13
Box 3. Bagian ketiga modul parsing data
Gambar 6 Hasil filter data oleh Modul filtering
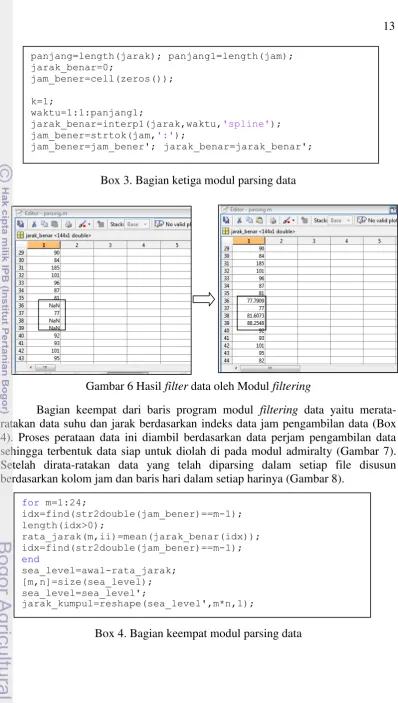
Bagian keempat dari baris program modul filtering data yaitu merata-ratakan data suhu dan jarak berdasarkan indeks data jam pengambilan data (Box 4). Proses perataan data ini diambil berdasarkan data perjam pengambilan data sehingga terbentuk data siap untuk diolah di pada modul admiralty (Gambar 7). Setelah dirata-ratakan data yang telah diparsing dalam setiap file disusun berdasarkan kolom jam dan baris hari dalam setiap harinya (Gambar 8).
Box 4. Bagian keempat modul parsing data
panjang=length(jarak); panjang1=length(jam); jarak_benar=0;
jam_bener=cell(zeros());
k=1;
waktu=1:1:panjang1;
jarak_benar=interp1(jarak,waktu,'spline');
jam_bener=strtok(jam,':');
jam_bener=jam_bener'; jarak_benar=jarak_benar';
for m=1:24;
idx=find(str2double(jam_bener)==m-1); length(idx>0);
rata_jarak(m,ii)=mean(jarak_benar(idx)); idx=find(str2double(jam_bener)==m-1);
end
sea_level=awal-rata_jarak; [m,n]=size(sea_level); sea_level=sea_level';
14
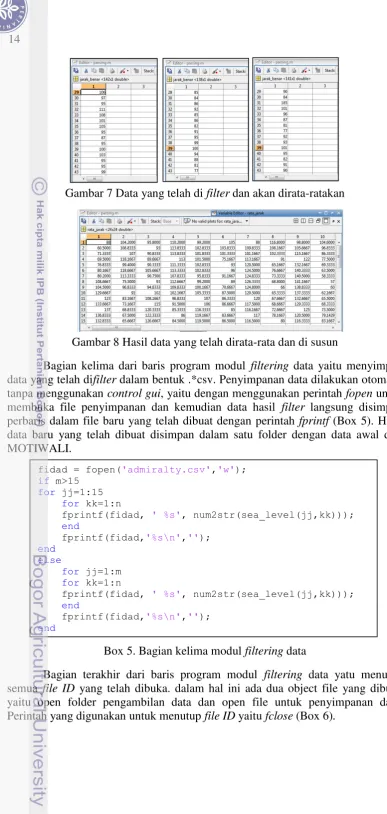
Gambar 7 Data yang telah di filter dan akan dirata-ratakan
Gambar 8 Hasil data yang telah dirata-rata dan di susun
Bagian kelima dari baris program modul filtering data yaitu menyimpan data yang telah difilter dalam bentuk .*csv. Penyimpanan data dilakukan otomatis tanpa menggunakan control gui, yaitu dengan menggunakan perintah fopen untuk membuka file penyimpanan dan kemudian data hasil filter langsung disimpan perbaris dalam file baru yang telah dibuat dengan perintah fprintf (Box 5). Hasil data baru yang telah dibuat disimpan dalam satu folder dengan data awal dari MOTIWALI.
Box 5. Bagian kelima modul filtering data
Bagian terakhir dari baris program modul filtering data yatu menutup semua file ID yang telah dibuka. dalam hal ini ada dua object file yang dibuka yaitu open folder pengambilan data dan open file untuk penyimpanan data. Perintah yang digunakan untuk menutup file ID yaitu fclose (Box 6).
fidad = fopen('admiralty.csv','w');
if m>15
for jj=1:15
for kk=1:n
fprintf(fidad, ' %s', num2str(sea_level(jj,kk)));
end
fprintf(fidad,'%s\n','');
end else
for jj=1:m
for kk=1:n
fprintf(fidad, ' %s', num2str(sea_level(jj,kk)));
end
fprintf(fidad,'%s\n','');
15
Box 6. Bagian terakhir dari modul filtering data
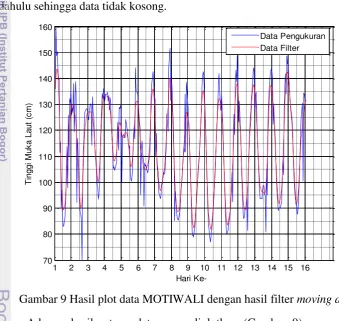
Hasil filter data MOTIWALI melalui modul filtering data berupa data MOTIWALI yang telah dirata-ratakan setiap jam dan disusun dalam matriks berukuran 15x24, dimana baris menunjukkan jumlah hari pengukuran yaitu selama 15 hari dan kolom merupakan jumlah jam pengukuran pasut yaitu 24 hari (Gambar 9). Susunan matriks 15x24 mengikuti format data untuk analisis harmonik pasang surut metode admiralty pada modul selanjutnya. Sebelumnya, data yang hilang pada pengukuran MOTIWALI dilakukan interpolasi terlebih dahulu sehingga data tidak kosong.
Gambar 9 Hasil plot data MOTIWALI dengan hasil filter moving average
Adapun hasil rataan data yang diplotkan (Gambar 9), merupakan hasil
16
Modul Admiralty
Metode yang digunakan dalam pengolahan data pasut dari MOTIWALI ini menggunakan metode admiralty. Perhitungan dengan metode Admiralty, yaitu hitungan untuk mencari nilai amplitudo (A) dan beda fase (g0) dari data pengamatan selama 15 piantan (hari pengamatan) dan mean sea level (S0) yang
sudah terkoreksi. Modul admiralty dalam hal ini berperan dalam proses pengolahan data dari MOTIWALI yang berekstensi *.txt sehingga menghasilkan data konstituen pasut. Modul admiralty dibuat dalam perangkat lunak MATLAB dengan sebelas bagian baris perintah.
Bagian baris perintah pertama adalah perintah untuk memanggil data pasut dengan perintah get, yang berada dibawah fungsi callback. Setelah data dipanggil, untuk membuka data yang telah dipanggil yaitu dengan perintah load. Selanjutnya, data yang telah dipanggil kemudian diinisialisasikan dengan nama tertentu dan diatur menjadi baris berupa tanggal dan kolom berupa jam. Data yang dipanggil oleh MATLAB menggunakan perintah load ini bisa berupa *txt dan juga bisa berupa *xls. Setelah itu data yang telah dipanggil di jumlahkan berdasarkan jamnya dengan perintah sum (Box 7).
Pada bagian ini, KP_1 merupakan nilai konstanta pengali 1 pada hitungan skema 2 (Lampiran 1), KP_2 merupakan nilai konstanta pengali 2 pada hitungan skema 4 (Lampiran 2), KP_3 merupakan bilangan pengali untuk penambah sesuai jumlah piantan pada skema 4 (Lampiran 2), dan BP_2 merupakan bilangan pengali untuk penghitungan skema 5 dan 6 (Lampiran 3).
Box 7. Bagian baris pertama modul admiralty
Data pasut telah dipanggil dan disimpan dalam direktori MATLAB, Bagian Baris perintah kedua yaitu adalah menentukan nilai positif (+) dan negatif (-) untuk kolom X1, Y1, X2, Y2, X4 dan Y4 dalam setiap hari pengamatan. Adapun
dalam hal ini data pasut yang telah tersusun dalam format baris hari dan kolom waktu dikalikan dengan konstanta pengali dari X1, Y1, X2, Y2, X4 dan Y4
(lampiran 1). Perintah for digunakan untuk mensimulasikan jumlah pengalian tiap
hari pengamatan dengan banyaknya jenis konstanta pengali. Setelah itu, perintah
17
Box 8. Bagian kedua modul admiralty
Bagian baris ketiga perintah yaitu Pengisian kolom X0, X1, Y1, X2, Y2, X4
dan Y4 dalam setiap hari pengamatan. Kolom X0 berisi perhitungan mendatar dari
hitungan X1 tanpa memperhatikan tanda (+) dan (-). Adapun kolom X1, Y1, X2, Y2,
X4 dan Y4 merupakan penjumlahan mendatar dari X1, Y1, X2, Y2, X4 dan Y4
dengan memperhatikan tanda (+) dan (-) harus ditambah dengan bilangan penambah B(B kelipatan 100). Penentuan bilangan penambah ditentukan oleh hasil tambahan dari X1, Y1, X2, Y2, X4 dan Y4 positif dan negatif. Jika selisih hasil
penjumlahan lebih besar dari 1000, maka bilangan pengalinya adalah 2000 dan jika selisih hasil penjumlahan lebih kecil dari 1000, maka bilangan penambahnya adalah 1000. Penentuan selisih penjumlahan X1, Y1, X2, Y2, X4 dan Y4 positif dan
negatif yaitu menggunakan perintah min (Box 9).
Box 9. Bagian keempat modul admiralty
Bagian baris perintah keempat dalam pembuatan modul admiralty yaitu menghitung nilai X00, Y00 sampai dengan X4d, Y4d berdasarkan indeks konstanta
pengali bagian kedua (lampiran 2). Ada beberapa langkah yang dilakukan untuk menghasilkan nilai X00, Y00 sampai dengan X4d, Y4d, yaitu :
Langkah pertama yaitu mengalikan X1, Y1, X2, Y2, X4 dan Y4 dengan
konstanta pengali kedua dimana nilai bilangan pengali disesuaikan dengan jumlah piantan pasut yang akan dihitung. Misal pada penghitungan 15 piantan, indeks pengali diambil dari baris kedelapan sampai baris keduapuluh dua. Pengalian dilakukan secara berulang untkuk semua komponen X1, Y1, X2, Y2, X4 dan Y4 dengan bilangan pengali
menggunakan fungsi for (Box 10).
for j=1:15 %jumlah hari (baris hari)%
for i=1:6 %jumlah baris konstanta pengali%
X=find(KP1(i,:)==1); Xn=find(KP1(i,:)==-1);
18
Box 10. Langkah pertama pada bagian keempat modul admiraty
Langkah kedua yaitu memisahkan komponen X1, Y1, X2, Y2, X4 dan Y4
setelah dikalikan secara berulang dengan bilangan pengali kedua. Pemisahan komponen X1, Y1, X2, Y2, X4 dan Y4 dilakukan dengan
mengambil secara manual setiap kolom dari matriks yang sudah dibentuk dari hasil perkalian X1, Y1, X2, Y2, X4 dan Y4 dengan bilangan pengali
(Box 11).
Box 11. Langkah kedua pada bagian keempat modul admiralty
Langkah ketiga yaitu penentuan bilangan penambah dari setiap komponen. Bilangan penambah ini disesuaikan dengan jumlah piantan pasut yang akan dihitung, 15 piantan atau 30 piantan. Bilangan penambah dikalikan secara berulang sesuai jumlah kolom yang yang tebentuk dari hasil perkalian indeks X00, Y00 sampai dengan X4d, Y4d menggunakan fungsi for
(Box 12).
Box 12. Langkah ketiga pada bagian keempat modul admiralty
Langkah keempat yaitu memisahkan komponen X00, Y00 sampai dengan
X4d, Y4d positif dan negatif. Komponen positif adalah hasil penjumlahan
semua bilangan yang telah dikalikan dengan konstanta pengali kedua yang nilainya diatas 0 dan komponen negatif adalah penjumlahan semua bilangan yang telah dikalikan dengan konstanta pengali kedua yang nilainya dibawah 0. Penjumlahan hasil perkalian pada bilangan X0, X1, Y1,
19 X2, Y2, X4 dan Y4 dengn konstanta pengali ini menggunakan perintah sum
(Box 13).
Box 13. Langkah keempat pada bagian keempat modul admiralty
Langkah yang terakhir dalam menentukan X00, Y00 sampai dengan X4d,
Y4d yaitu hasil pemisahan komponen positif dan komponen negatif
dijumlahkan kemudian juga dijumlahkan dengan hasil bilangan penambah yang telah dihasilkan pada langkah ketiga. Hitungan ini dilakukan dengan menjumlahkan satu persatu dari komponen yang ada (Box 14).
Box 14. Langkah terakhir dari bagian keempat modul admiralty
Bagian baris perintah kelima yaitu menentukan besarnya , . Untuk perhitungan adalah dengan cara mencari nilai X00, X10,
selisih X12 dan Y1b, selisih X13 dan Y1c, X20, selisih X22 dan Y2b, selisih X23 dan
Y2c, selisih X42 dan Y4b dan selisih X44 dan Y4d kemudian dikalikan dengan
bilangan pengali kedua. Untuk perhitungan mencari nilai Y10, jumlah Y12
dan X1b, jumlah Y13 dan X1c Y20, jumlah Y22 dan X2b, jumlah Y23 dan X2c, jumlah
Y42 dan X4d dan jumlah Y44 dan X4d kemudian dikalikan dengan bilangan pengali
kedua. Setelah didapatkan hasil selisihnya, nilai dan nilai
adalah hasil penjumlahan dari masing-masing komponen berdasarkan sembilan konstituen pasut (M2, S2, K2, N2, K1, O1, P1, M4 dan MS4) (Box 15). Adapun nilai
PR setiap komponen konstituen pasut adalah pangkat dua dari dan dimana nilai P adalah ketetapan.
X10p=sum(X10(X10(:,1)>0)); X10n=sum(X10(X10(:,1)<0)); Y10p=sum(Y10(Y10(:,1)>0)); Y10n=sum(Y10(Y10(:,1)<0)); X12p=sum(X12(X12(:,1)>0)); X12n=sum(X12(X12(:,1)<0));
. . .
Y4dp=sum(Y4d(Y4d(:,1)>0)); Y4dn=sum(Y4d(Y4d(:,1)<0));
total(1,1)=X10p+X10n+H(8); total(1,2)=Y10p+Y10n+H(15); total(2,1)=X12p+X12n+H(9); total(2,2)=Y12p+Y12n+H(16); total(3,1)=X1bp+X1bn+H(10); total(3,2)=Y1bp+Y1bn+H(17); .
. .
20
Box 15. Bagian kelima modul admiralty
Bagian baris keenam dari perintah modul admiralty yaitu menghitung nilai f untuk fM2 fK1 fO1 fM4. Penentuan nilai fM2 fK1 fO1 fM4 dihasilkan dari beberapa formula yang terdapat komponen waktu pengambilan data didalamnya. Penentuan waktu dalam hal ini menggunakan perintah get dimana nilai tanggal, bulan, serta tahun pengambilan secara otomatis diambil dari data yang diinput dalam static text. Dalam Box 16 dijelaskan secara detail baris perintah dalam formulasi penghitungan untuk menentukan nilai f berdasarkan persamaan nilai f.
Box 16. Bagian ketujuh modul admiralty
21 Bagian baris ketujuh dari perintah modul admiralty yaitu menghitung nilai V dari M2 N2 K1 O1. Penentuan nilai V ketentuan formula seperti yang dituliskan detail dalam perintah (Box 17). Bagian pertama yaitu mencari nilai S, Hh, dan P untuk dapat menghitung komponen V, selanjutnya Penghitungan V dari M2 N2 K1 O1 menggunakan persamaan nilai V (Box 17)
Box 17 Tahap pertama pada bagian ketujuh modul admiralty
Bagian kedelapan dari baris perintah modul admiralty yaitu menghitung nilai u dari komponen M2 K1 O1 K2 M4. Nilai u dihitung berdasarkan tanggal pengambilan data karena fungsi u dihasilkan dari nilai cos dan sin dari penghitungan jumlah hari dalam setahun pengambilan data. Perintah mencari u
seperti yang dijelaskan baris perintah pada Box 18.
Box 18 Bagian kedelapan modul admiralty
Bagian kesembilan dari baris program modul admiralty adalah menentukan nilai w/f dan W/f dari S2 dan MS4, wf dan Wf dari K1, serta w dan 1+W dari N2. Pada penghitungan ini digunakan tools curve fitting pada MATLAB dengan menngambil data dari tabel harga w, W dan (1+W) (Lampiran 4) untuk menghasilkan w/f dan W/f dari S2 dan MS4, wf dan Wf dari K1, serta w dan 1+W dari N2 sehingga nilai regresinya sama dengan data yang telah diinput di awal. Adapun nilai X1 X2 dan X3 dihasilkan dari nilai V serta nilai u seperti pada
penjelasan detail baris perintah pada Box 19.
22
Box 19 Bagian kesembilan modul admiralty
Bagian kesepuluh dari baris perintah modul admiralty adalah menghitung nilai r dari komponen M2 S2 N2 K1 O1 M4 dan MS4. penghitungan nilai r
merupakan nilai invers tangen dari dan setiap komponen yang telah dihasilkan sebelumnya (Box 15). Penentuan nilai r tersebut menggunakan fungsi if dan else if, sedangkan invers tangen menggunakan perintah atand (Box 20).
Box 20 Bagian kesepuluh modul admiralty
x11=(VK1+uK1); x1=(x11-(360*floor(x11/360)));
wf=[wfS2 WfS2 wfK1 WfK1 wn2 Wn2];
23 Bagian terakhir dari baris perintah modul admiralty ini adalah penentuan konstituen pasut. Nilai konstituen pasut dihasilkan dari formulasi keseluruhan penghitungan komponen yang telah dihitung di awal berdasarkan konstituennya masing-masing. Ada sembilan konstituen pasut yang dihasilkan yaitu M2 S2 N2 K1 O1 K2 P1 M4 dan MS4 berupa amplitudo (A) serta fase (go) dan hasilnya semua ditampilkan dalam edit text pada control gui menggunakan perintah set
(Box 21).
Box 21 Bagian terakhir modul admiralty
24
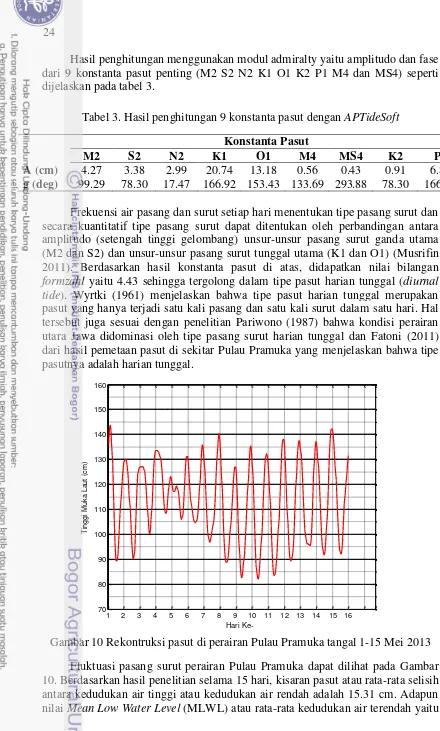
Hasil penghitungan menggunakan modul admiralty yaitu amplitudo dan fase dari 9 konstanta pasut penting (M2 S2 N2 K1 O1 K2 P1 M4 dan MS4) seperti dijelaskan pada tabel 3.
Tabel 3. Hasil penghitungan 9 konstanta pasut dengan APTideSoft Konstanta Pasut
M2 S2 N2 K1 O1 M4 MS4 K2 P1
A (cm) 4.27 3.38 2.99 20.74 13.18 0.56 0.43 0.91 6.84
g (deg) 99.29 78.30 17.47 166.92 153.43 133.69 293.88 78.30 166.92 Frekuensi air pasang dan surut setiap hari menentukan tipe pasang surut dan secara kuantitatif tipe pasang surut dapat ditentukan oleh perbandingan antara amplitudo (setengah tinggi gelombang) unsur-unsur pasang surut ganda utama (M2 dan S2) dan unsur-unsur pasang surut tunggal utama (K1 dan O1) (Musrifin 2011). Berdasarkan hasil konstanta pasut di atas, didapatkan nilai bilangan
formzahl yaitu 4.43 sehingga tergolong dalam tipe pasut harian tunggal (diurnal tide). Wyrtki (1961) menjelaskan bahwa tipe pasut harian tunggal merupakan pasut yanghanya terjadi satu kali pasang dan satu kali surut dalam satu hari. Hal tersebut juga sesuai dengan penelitian Pariwono (1987) bahwa kondisi perairan utara Jawa didominasi oleh tipe pasang surut harian tunggal dan Fatoni (2011) dari hasil pemetaan pasut di sekitar Pulau Pramuka yang menjelaskan bahwa tipe pasutnya adalah harian tunggal.
Gambar 10 Rekontruksi pasut di perairan Pulau Pramuka tangal 1-15 Mei 2013 Fluktuasi pasang surut perairan Pulau Pramuka dapat dilihat pada Gambar 10. Berdasarkan hasil penelitian selama 15 hari, kisaran pasut atau rata-rata selisih antara kedudukan air tinggi atau kedudukan air rendah adalah 15.31 cm. Adapun nilai Mean Low Water Level (MLWL) atau rata-rata kedudukan air terendah yaitu
25 105.94 cm dan nilai Mean High Water Level (MHWL) atau rata-rata kedudukan air tertinggi yaitu 121.25 cm dengan tinggi muka laut rata-rata yaitu 113.59 cm.
Modul Prediksi Pasang Surut
Modul prediksi pasut merupakan modul yang bekerja mengolah nilai konstanta pasut sehingga bisa dilakukan prediksi pasut. Pada modul prediksi, konstanta pasut yang telah dihasilkan oleh modul admiralty diolah sehingga dapat menghasilkan prediksi grafik surut berdasarkan waktu yang diinginkan. Terdapat 4 bagian dalam perintah modul Prediksi, yaitu bagian pengolahan komponen pasang surut, input komponen pasang surut, penentuan waktu prediksi dan plot prediksi pasut.
Bagian pertama dalam modul prediksi yaitu pengolahan dan inisialisasi kecepatan sudut dan periode dari komponen pasang surut (Box 22)
Box 22 Bagian pertama dari modul prediksi pasut
% T + s - h +15 w0
Tide.Title{ 1}='Principal lunar, semidiurnal';
Tide.Name{2}='S2'; Tide.Doodson{2}=[+2 +2 -2 0 0 0];
Tide.Title{2}='Principal solar, semidiurnal';
Tide.Name{3}='N2'; Tide.Doodson{3}=[+2 -1 0 +1 0 0];
Tide.Title{3}='Principal lunar elliptic, semidiurnal';
Tide.Name{4}='K2'; Tide.Doodson{4}=[+2 +2 -1 0 0 0];
Tide.Title{4}='Sun-Moon angle, semidiurnal';
Tide.Name{5}='K1'; Tide.Doodson{5}=[+1 +1 0 0 0 0];
Tide.Title{5}='Sun-Moon angle, diurnal';
Tide.Name{6}='O1'; Tide.Doodson{6}=[+1 -1 0 0 0 0];
26 dari komponen pasut yang telah dihasilkan dari modul admiralty. Komponen pasut yang diinput kemudian disusun dalam bentuk matriks dan dalam satu variabel yang sama sehingga memudahkan dalam pengolahan dalam bagian perintah selanjutnya (Box 23)
Box 23 Bagian kedua dari modul prediksi pasut
Bagian ketiga dalam modul prediksi pasut adalah penentuan waktu prediksi pasut sesuai waktu yang diinginkan pengguna serta perhitungan ramalan pasut
berdasarkan waktu yang ditentukan. Penentuan prediksi pada Box 24 menggunakan rumus prediksi (40) yang telah dijelaskan dalam bab metodologi.
Box 24 Bagian ketiga dari modul prediksi pasut
Bagian terakhir dari modul prediksi adalah visualisasi data elevasi muka air hasil ramalan berdasarkan waktu yang diinginkan, dalam jangka waktu yang sama (Box 25).
Box 25 Bagian terakhir dari modul prediksi pasut
text=get(handles.lokasi, 'String'); Place(1).P = [99.29 78.30 17.47 78.30 166.92 153.43 166.92 133.69 293.88 ];
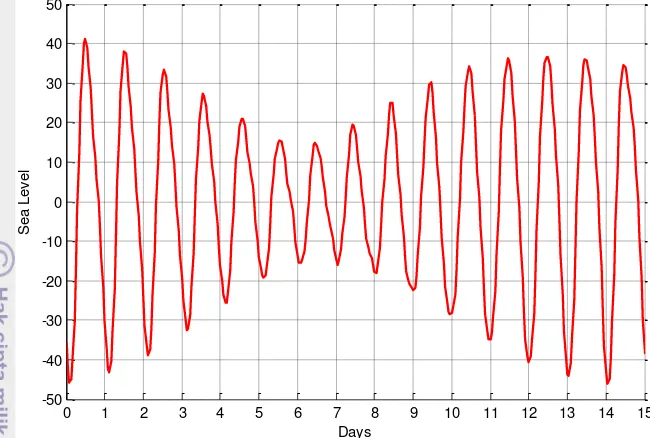
27
Gambar 11 Hasil prediksi pasang surut selama 15 hari di Pulau Pramuka Berdasarkan hasil prediksi pasang surut yang telah dilakukan selama 15 hari dengan input nilai hasil pengolahan modul admiralty yaitu Sembilan konstanta pasut dihasilkan bentuk elevasi muka air di perairan Pulau Pramuka seperti pada Gambar 11. Data hasil prediksi menunjukkan bahwa tinggi pasut maksimum yang yaitu 41.07 cm dan tinggi pasut minimum yaitu –46.22 cm dengan rata-rata tinggi pasut sebesar -0.10 cm.
Validasi Data
Koreksi data pada hasil penelitian dilakukan dengan membandingkan data hasil pengolahan interface MOTIWALI dengan data hasil pengolahan toolbox t-tide yang mneggunakan metode least square untuk menghasilkan konstanta pasut seperti pada tabel 4.
Tabel 4 Perbandingan nilai konstanta pasut menggunakan toolboxt-tide dengan
interface MOTIWALI
No Konstanta T-tides Interface
28
Setelah dihasilkan selisih nilai amplitudo dan fase pada setiap konstanta pasut, validasi data dilakukan dengan mencari RMSE dari amplitudo dan fasenya. berdasarkan tabel 4, dimana hasil dari konstanta pasut dari APTideSoft dengan
toolbox t-tide menghasilkan nilai RMSE pada amplitudo yaitu 1.89 cm dan RMSE pada fase yaitu 102.27 deg. Nilai RMSE ini menjelaskan keakuratan data jika dibandingkan dengan data model, dimana nilai RMSE semakin menuju ke 0 data dikatakan aka semakin akurat.
SIMPULAN DAN SARAN
Simpulan
Pengembangan sistem analis harrmonik pasang surut dengan metode Admiralty menggunakan MATLAB dibangun dengan empat tahap utama, yaitu
filter data, analisis data pasut sehingga menghasilkan komponen pasut, penentuan tipe pasang surut, serta prediksi pasut. Konstanta pasang surut yang dianalisis menghasilkan 9 komponen pasut yaitu M2, S2, N2, K1, O1, M4, MS4, K2, P1. Nilai konstanta pasut menghasilkan bilangan formzahl sebesar 4.43 yang menunjukkan bahwa tipe pasut di Pulau Pramuka adalah pasut harian tunggal. Hasil prediksi pasut dengan modul prediksi juga menampilkan bentuk grafik tipe pasut di Pramuka adalah pasut hariang tunggal dengan tinggi maksimum 41.07 dan tinggi minimum -46.22 cm. Validasi data dilakukan dengan membandingkan hasil konstanta pasang surut menggunakanl interface MOTIWALI dengan toolbox t-tides kemudian dicari RMSE dari fase dan amplitudonya. Berdasarkan perhitungann, RMSE pada amplitudo yaitu 1.89 cm dan RMSE pada fase yaitu 102.27 deg.
Saran
29
DAFTAR PUSTAKA
Ali M, Mihardja DK, Hadi S. 1994. Pasang Surut Laut. Institut Teknologi Bandung. Bandung
Emery J, Thomson R. 1998. Data Analysis Methods in Physical Oceanography. Gray Publishing, Tunbridge Wells, Kent, Great Britain, BPC Wheaton, Exeter.
Fatoni, KI. 2011. Pemetaan Pasang Surut dan Pola Perambatannya di Perairan Indonesia [Tesis]. Bogor (ID): Institut Pertanian Bogor.
Gencay R, Stengos T. 1998. Moving average rule, volume and the predictability of security returns with feedforward networks. Jurnal of Forecasting. 17(5-6):401-414.
Heliani LS, Ateya I, Fukuda Y, Takemoto S. 2002. Mean sea level and sea surface variability of Indonesian waters from TOPEX/Poseidon. Di dalam: H.Drewes et al., editor. Vertical Reference System IAG Symposia 124. Jerman (DE): Springer. hlm 259-263.
Hermawi A. 2007. Aplikasi Moving Average Filter pada Teknologi Enkripsi.
Jurnal Teknik Elektro.9(1):33-35
Hidayat S. 2010. Analisis Harmonik Pasut dengan Metode Admiralty (Studi Kasus Pelabuhan Beras, Bontang, Kalimantan Timur) [Makalah]. Sekolah Pascasarjana. Departemen Ilmu dan Teknologi Kelautan IPB. Bogor
Iqbal M, Jaya I. 2011. Pengembangan dan Uji Coba Instrumen Pasut Menggunakan Gelombang Ultrasonik. Laboratorium Instrumentasi dan Telemetri Kelautan. Departemen Ilmu dan Teknologi Kelautan. Fakultas Perikanan dan Ilmu Kelautan IPB. Bogor.
Matsumoto, K., T. Sato, T. Takanezawa, and M. Ooe. 2004. NAO.99b tidal prediction system. [Diakses 18 Oktober 2013]. Tersedia pada: http://www.miz.nao.ac.jp/staffs/nao99/index_En.html.
Musrifin. 2011. Analisis Pasang Surut Muara Mesjid Dumai. Jurnal Perikanan da Kelautan. 16(1):48-55
Ongkosono OSR, Suyarso. 1989. Pasang-Surut. Lembaga Ilmu Pengetahuan Indonesia. Pusat Penelitian dan Pengembangan Oseanologi. Jakarta
Parker BB. 2007. Tidal Analysis and Prediction. NOAA Special Publication NOS CO-OPS 3. Washington DC (USA): U.S Dept. of Commerce.
Pariwono. 1989. Gaya Penggerak Pasut. Di dalam: Ongkosono, OSR. dan Suyarso, editor. Pasang Surut. Jakarta (ID). P3O-LIPI. hlm 13-23.
Pariwono. 1989. Kondisi Pasang Surut di Indonesia. Di dalam: Ongkosono, OSR. dan Suyarso, editor. Pasang Surut. Jakarta (ID). P3O-LIPI. hlm 135-147. Prasetyo Y. 2008. Analisis Kualitas Pengamatan Data Pasut Berdasarkan
Perbandingan Komponen Pasut dan Simpangan Baku. Teknik. 29(01):63-66. Pugh DT. 1987. Tides, Surges, and Mean Sea Level. California (USA): John
Wiley & Sons Ltd.
30
Rufaida NH. 2008. Perbandingan Metode Least Square (Program World Tides dan Program TIFA) dengan Metode Admiralty dalam Analisis Pasut [Skripsi] Bandung (ID): Institut Teknologi Bandung.
Sjachulie D. 1999. Penerapan Metode Admiralty dalam Analisis Pasut Jangka Pendek tanpa Menggunakan Tabel [Skripsi]. Bandung (ID): Institut Teknologi Bandung
Trijono D. 2001. Teknik Validasi Data dalam Rangka Mendukung Hasil Penelitian. Temu Teknis Fungsional Non Peneliti 2001 [Internet]. [diunduh
30 Oktober 2013]; 252-260. Tersedia pada:
http://balitnak.litbang.deptan.go.id/index.php?option=com_phocadownload &view=category&id=66:3&download=1057:3&start=20&Itemid=10.
Wibowo PE. 2010. Identifikai Penutupan Lahan Pulau Panggang, Pulau Pramuka, dan Pulau Karya, antara Tahun 2004 dan Tahun 2008 [Skripsi]. Bandung (ID): Institut Teknologi Bandung.
Wyrtki, K. 1961. Phyical Oceanography of the South East Asian Waters. Naga Report Volume 2. California (USA): Scripps Institution Oceanography University of California.
31 Lampiran 1. Tabel Harga Konstanta Pengali pada perhitungan skema 2
X1 X2 Y1 Y2 X4 X4
Jam ke-
32
Lampiran 2. Tabel Harga Konstanta Pengali kedua dan Bilangan Pengali pertama pada Skema 4
Untuk 15 hari digunakan pertengahan 15
33 Lampiran 3. Tabel Harga Bilangan Pengali 2 untuk Skema 5 dan 6
S0 M2 S2 N2 K1 O1 M4 MS4
Untuk skema
V dan X00 1.00 - - - -
PR cos r X10 0.01 -0.01 0.01 0.03 1.00 -0.07 0.01 - X12 - Y1b -0.02 0.09 -0.01 -0.09 -0.09 1.00 -0.02 0.02 X13 - Y1c 0.04 -0.07 0.01 0.13 0.20 -0.59 0.03 - X20 -0.01 -0.15 1.00 0.29 0.01 - -0.02 - X22 - Y2b 0.01 1.00 -0.14 -0.61 -0.02 -0.03 0.03 -0.03 X23 - Y2c -0.02 -0.65 0.25 1.00 0.03 - -0.05 -0.01
X42 - Y4b - 0.01 - 0.01 - - 0.10 1.00
X44 - Y4d - -0.01 0.01 0.02 - - 1.01 -0.05
Untuk skema
VI Y10 - - -0.01 0.02 1.01 -0.08 0.01 0.01 Y12 + X1b - 0.05 0.01 -0.05 -0.12 1.05 -0.03 0.01 Y13 + X1c - -0.02 -0.02 0.09 0.24 -0.65 0.04 0.02 Y20 - -0.16 1.00 0.30 -0.01 0.02 -0.03 -0.01 Y22 + X2b - 1.04 -0.15 -0.64 0.02 -0.10 0.04 -0.02 Y23 + X2c - -0.70 0.26 1.03 -0.03 0.09 -0.07 -0.03
Y42 + X4b - 0.02 - - - - 0.11 1.00
Y44 + X4d - -0.03 0.01 0.05 - - 1.00 -0.06
Untuk skema
VII Pembagi P 360 175 214 166 217 177 273 280
Untuk skema
35 Lampiran 5 Tutorial Penggunaan APTideSoft
1. Buka program APTideSoft dan isikan lokasi pengamatan pada kolom Lokasi Pengamatan
2. Buka folder berisi data perhari hasil rekaman MOTIWALI yang sudah dikumpulkan menjadi satu folder dengan tomnol Open Folder serta masukkan input data jarak sensor dengan dasar laut pada kolom Tinggi Transducer.
36
4. Pilih Open File untuk membuka data hasil yang telah filter yang sudah dijadikan dalam satu file.
5. Untuk analisis harmonik metode Admiralty isikan dulu tanggal, bulan dan tahun pengamilan data, kemudian pilih tombol Analisis. Sedangkan untuk mengetahui tipe pasut pilih tombil Tipe Pasut
6. Hasil analisis yaitu konstanta pasut akan tertera dalam kolom konstituen yang telah ada dan dapat juga disimpan dengan piih tombol Save.
7. Untuk prediksi, isi terleih dahulu tanggal prediksi, lalu pilih tombol Prediksi, maka akan muncul grafik hasil prediksi.
38
RIWAYAT HIDUP
Penulis dilahirkan di Sumenep pada tanggal 8 Januari 1992 dari ayah yang bernama Hadariadi dan ibu Ainur Rahimah. Penulis merupakan anak pertama dari dua bersaudara. Tahun 2009 penulis menyelesaikan pendidikan di Sekolan Menengah Atas (SMA) Negeri 1 Sumenep dan pada tahun yang sama juga penulis lulus seleksi masuk Institut Pertanian Bogor (IPB) melalui jalur Undangan Seleksi Mahasiswa IPB dan diterima di Departemen Ilmu dan Teknologi Kelautan, Fakultas Perikanan dan Ilmu Kelautan.
Selama mengikuti perkuliahan, penulis pernah menjadi asisten Dasar-dasar Instrumentasi Kelautan periode 2011/2012 dan 2012/2013, asisten Instrumentasi Kelautan periode 2012/2013 dan 2013/2014 dan asisten Pemetaan Sumber Daya Hayati Laut tahun ajaran 2012/2013
.
Penulis juga aktif dalam organisasi Badan Eksekutif Mahasiswa FPIK periode 2011/2012 sebagai Staf Divisi Pengembangan Budaya Olahraga dan Seni (PBOS), Himpunan Mahasiswa Ilmu dan Teknologi Kelautan (HIMITEKA) periode 2011/2012 dan 2012/2013 sebagai staf dan ketua divisi Hubungan Luar dan Komunikasi (HUBLUKOM), Marine Instrumentation and Telemetry (MIT) Club periode 2011-2013 sebagai staf divisi perlengkapan dan OMDA Keluarga Mahasiswa Madura (GASISMA). Selain itu penulis juga pernah menjadi pemakalah dalamLaunching Ekspedisi Arus Balik I tahun 2012 serta pernah mengikuti Kontes Muatan Roket Indonesia (KOMURINDO) pada tahun 2012.