DAFTAR PUSTAKA
Anita, N.S. 2010. Robot Micromouse Dengan Menggunakan Algoritma Depth-first Search.
Awal, H. 2015. Algoritma Fuzzy Logic Dan Wallfollower Pada Sistem Navigasi Robot Hexapod Berbasis Mikrokontroller AVR. Jurnal KomTekInfo Fakultas Ilmu Komputer Vol 2.
Barros, Taiser T. T, & Lages, W, F. 2012. Development of a Firefighting Robot for Educational Competitions. International Conference on Robotics in Education pp: 47-53.
Basyir, M. 2013. Simulasi Robot Pemadam Api dengan Metode Algoritma Genetika. Prosiding SN Yube.
Choudhury, N. & Singh, T. C. 2015. Voice Controlled Boebot using Pointbug Algorithm for Human Robot interaction using Android Technology.
International Journal of Computer Applications Vol. 119: 13.
Dorf, R.C, 1983. Sistem Pengaturan, Edisi 3, Erlangga: Jakarta.
Erinofiardi, Nurul Iman Supardi, Redi. 2012. Penggunaan PLC Dalam Pengontrolan Temperatur, Simulasi Pada Prototype Ruangan. Jurnal Mekanikal, Vol.3 No.2 –
Juli 2012.
Febriani, R. & Suprijadi. 2012. Aplikasi metode random walks untuk control gerak robot berbasis citra Vol. 2(1).
HC-SR04 Datasheet, http://www.electroschematics.com/8002/hc-sr04-datasheet/, (27 Maret 2015 02.54 PM)
Indriyanto, C. 2015. Perancangan Sistem Kendali Remote Control Robot Mobil Menggunakan Smartphone Android. Skripsi. Fakultas Ilmu Kompter dan Teknologi Informasi Universitas Sumatera Utara.
Jayashri Bangali and Arvind Shaligram "Design and Implementation of Security
Systems for Smart Home based on GSM technology" International Journal of
Smart Home,Vol.7, No.6 (2013).
Pakpahan, S, 1988. Kontrol Otomatik Teori dan Penerapan. Penerbit Erlangga: Jakarta.
Rahmiati, P, Firdaus, G. & Fathorrahman, N. 2014. Implementasi Sistem Bluetooth Menggunakan Android dan Arduino untuk kendali peralatan Elektrolit. Jurnal
ELKOMIKA Institut Teknologi Nasional Bandung Vol. 2(1).
Setiawan, R. 2012. Pengembangan Robot Pendeteksi Objek Berdasarkan Warna Dengan Sensor Kamera Sebagai Media Pembelajaran. Skripsi. Universitas Negeri Yogyakarta.
Syahid. 2012. Rancang Bangun Robot Beroda Berbasis Android Menggunakan Komunikasi USB.JTET. VOL1-2 pp: 33-42.
BAB 3
ANALISIS DAN PERANCANGAN SISTEM
Bab ini akan menjelaskan proses yang terjadi di dalam aplikasi pengendalian pergerakan robot untuk menuju suatu lokasi. Adapun proses yang terjadi di dalam aplikasi tersebut adalah proses terhubung antara robot dengan aplikasi dan pengendalian pergerakan robot untuk berpindah secara otomatis.
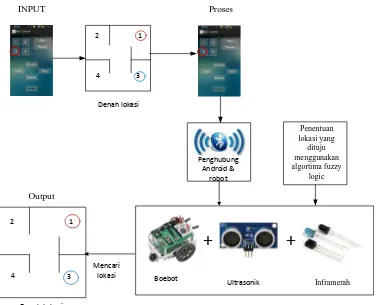
Gambar 3.1. dapat dilihat arsitektur umum sistem. Adapun tahapan yang dilalui oleh pengguna pada sistem adalah sebagai berikut:
Input dari arsitektur umum adalah lokasi tujuan yang diberi tanda lingkaran
berwarna biru, Titik awal robot sudah ditentukan yaitu ruangan yang diberi tanda lingkaran berwarna merah. Perpindahan robot ke lokasi dikendalikan dengan menggunakan smartphone agar robot bergerak sesuai dengan tujuan yang diinginkan oleh pengguna. Smartphone terhubung dengan robot melalui media Bluetooth.
Smartphone terlebih dahulu ditanamkan program untuk mengendalikan lokasi yang
akan dituju dan mengendalikan pergerakan robot.
Proses pengiriman perintah tujuan menggunakan media Bluetooth sebagai media penghubung. Robot akan bergerak secara otomatis menuju lokasi yang telah ditentukan oleh pengguna menggunakan smartphone sebagai sistem pengendali robot. Robot akan ditanamkan sebuah program untuk penentuan lokasi yang dituju secara otomatis dengan menggunakan algoritma fuzzy logic. Fuzzy logic melakukan penentuan salah satu dari sejumlah lokasi tujuan secara rekursif. Robot juga akan dipasangkan sensor ultrasonic dan sensor infra merah. Sensor ultrasonik berkerja dengan cara memancarkan suatu gelombang dan menghitung waktu pantulan gelombang tersebut, kemudian sensor infra merah menandai garis hitam agar robot tetap bergerak di atas garis hitam. Sensor ultrasonik berfungsi agar robot dapat menghindari benturan dengan benda yang berada di depan robot tersebut agar pergerakan menuju lokasi berjalan dengan lancar tanpa adanya hambatan.
Output yang diperoleh yaitu pergerakan robot untuk menuju lokasi yang
diinginkan oleh pengguna. Pengguna dapat mengendalikan pergerakan robot secara otomatis maupun secara manual. Hal ini bertujuan untuk memodernisasi sistem kursi roda secara otomatis untuk bergerak dari satu ruang ke ruang lain secara otomatis.
Proses pengontrolan robot ini dilakukan sejak robot dan aplikasi di
smartphone telah terhubung. Adapun konektifitas antara kedua sistem ini dilakukan
dengan memanfaatkan teknologi Bluetooth sebagai media penghubung antar perangkat.
Adapun pengontrolan yang dapat dilakukan pada aplikasi robot pengendalian lokasi ini adalah:
1. Menggerakkan secara otomatis.
Pada proses ini aplikasi dapat melakukan pengendalian robot menggunakan
smartphone. Proses ini dilakukan dengan memberi perintah pada robot agar
bergerak secara otomatis ke lokasi yang sudah dituju dan terpetakan. 2. Menggerakkan secara manual.
Pada proses ini aplikasi dapat melakukan pengendalian secara manual. Proses ini dilakukan dengan cara memberi perintah pada robot agar bergerak secara manual dengan perintah maju, mundur, kanan, dan kiri.
3.2 Analisis Sistem
Proses analisis dilakukan sebelum melakukan perancangan untuk mendapatkan kebutuhan dari sistem yang akan dikembangkan. Sistem ini bertujuan untuk mengendalikan pergerakan robot secara otomatis dari satu tempat ke tempat lain menggunakan aplikasi smartphone dengan sistem operasi android.
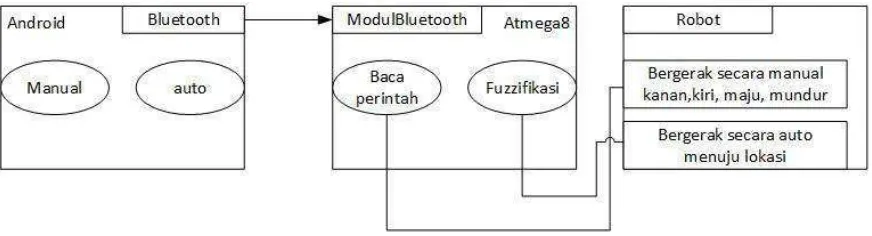
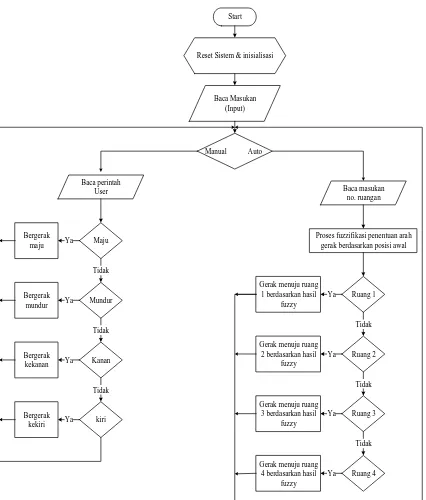
Gambar 3.2 Diagram proses pengendalian robot
Gambar 3.2. merupakan proses yang terjadi pada sistem pengendalian pergerakan robot untuk menuju suatu lokasi menggunakan smartphone dengan sistem operasi Android. Agar proses ini dapat dilakukan, terlebih dahulu smartphone dan robot harus saling terhubung dengan memanfaatkan media Bluetooth.
Adapun proses pengendalian robot untuk menuju suatu lokasi menggunakan aplikasi Android ini adalah sebagai berikut:
1. Pengguna melakukan pair-to-pair android dengan perangkat robot menggunakan Bluetooth.
2. Pada proses pair-to-pair ini, pengguna menginput kode Bluetooth perangkat robot pada smartphone.
3. Kode Bluetooth yang dikirim oleh smartphone android akan diproses oleh ATmega8 untuk disesuaikan agar saling terkoneksi.
4. Jika kode yang dikirim pengguna menggunakan smartphone sesuai, maka
smartphone dan perangkat robot akan saling terhubung.
5. Setelah terhubung, pengguna dapat melakukan pengendalian robot untuk menuju suatu lokasi secara otomatis menggunakan smartphone.
6. Pengguna menggunakan aplikasi untuk mengendalikan pergerakan robot. Adapun pengendalian yang dilakukan oleh pengguna adalah pergerakan secara otomatis dan manual.
robot. Sedangkan sinyal digital dimanfaatkan pada output yang di hasilkan oleh ATmega8.
Pada penelitian ini, penulis akan merancang dan membangun aplikasi pada
smartphone Android untuk mengendalikan robot untuk menuju suatu lokasi
menggunakan media Bluetooth.
3.2.1 Perancangan Sistem Dengan Use Case
Use case adalah salah satu pemodelan yang digunakan untuk memodelkan
persyaratan sistem. Dengan use case ini digambarkan siapa saja yang berinteraksi dengan sistem dan apa saja yang dapat dilakukan dengan sistem.
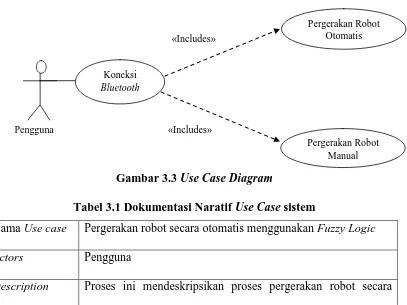
Diagram menunjukkan interaksi antara pengguna dan entitas eksternal lainnya dengan sistem yang sedang dikembangkan. Lebih jelasnya Use Case Diagram digunakan untuk menggambarkan interaksi antara pengguna dengan robot. Pada robot ini pengguna memasukkan perintah di smartphone berupa nomor ruang lokasi yang akan dituju oleh robot secara otomatis dan akan dikirim ke robot yang akan ditangkap jaringan Bluetooth dan akan bergerak sesuai perintah pengguna. Use Case Diagram robot autonomos ruangan dapat dilihat seperti pada Gambar 3.3.
Gambar 3.3 Use Case Diagram
Tabel 3.1 Dokumentasi Naratif Use Case sistem
Nama Use case Pergerakan robot secara otomatis menggunakan Fuzzy Logic
Actors Pengguna
otomatis dengan komunikasi Bluetooth menggunakan
smartphone Android
Pre-Condition Sistem dihidupkan (power on)
Basic Flow Kegiatan pengguna Respon sistem Meng-input tombol
ruangan tujuan
Menunggu keseluruhan proses inputan selesai
Alternate Flow Menekan tombol
reset/power
Sistem reset
Post-Condition Robot akan bergerak sesuai inputan dari Pengguna
3.3 Metode Penelitian
Dalam sistem ini, pengguna melakukan pengendalian robot menggunakan aplikasi
smartphone dengan sistem operasi Android. Pengendalian yang dilakukan yaitu
menekan tombol pada aplikasi untuk memberi perintah kepada robot. Setiap perintah yang diberikan akan dikirim dari Android dan akan diterima oleh modul Bluetooth yang ada pada robot. Adapun metode penelitian ini terdiri atas:
1. Input
Pada penelitian ini, input yang diterima oleh sistem terdiri atas dua jenis, yaitu:
a. Input pada aplikasi android
Pada android, input yang diterima berupa kode Bluetooth perangkat robot yang dimasukkan oleh pengguna pada smartphone.
b. Input pada robot
dan perintah untuk menuju suatu lokasi secara otomatis atau menggerakkan robot secara manual.
2. Proses
Proses merupakan tahapan untuk mengelola perintah atau input yang diterima oleh sistem. Pada penelitian ini, input yang dikelola adalah input yang masuk kedalam robot. Adapun input yang diperoleh dari smartphone melalui media
Bluetooth akan diproses oleh ATmega8. ATmega8 akan menyesuaikan input
dengan perintah yang ditanam di dalam sistem. Jika sesuai, ATmega8 akan memberi perintah kepada robot untuk bergerak secara manual atau otomatis. Pada perintah otomatis di ATmega akan ditanam algoritma fuzzy logic sehingga arah robot bergerak berdasarkan titik awal yang sudah ditentukan. 3. Output
Pada tahapan ini, output yang dihasilkan dari proses adalah mengaktifkan pengendalian secara manual dan otomatis yang menggunakan fuzzifikasi penentuan arah gerak berdasarkan posisi awal. Adapaun aktivasi yang akan menghasilkan beberapa perintah. yaitu:
1. Menggerakkan robot secara manual untuk berpindah ke ruangan yang ditentukan.
2. Menggerakkan robot secara otomatis untuk berpindah ke ruangan yang sudah ditentukan.
3.4 Flowchart Sistem
Flowchart sistem merupakan bagan yang menunjukkan alur kerja atau apa yang
sedang dikerjakan oleh sistem secara keseluruhan serta prosedur yang digunakan dalam pengoperasiannya. Dengan kata lain, flowchart sistem merupakan deskripsi secara grafik dari prosedur-prosedur yang membentuk sebuah sistem.
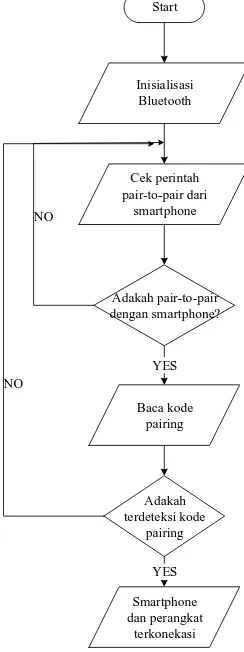
1. Pada saat perangkat dinyalakan atau diberi tegangan listrik. Sistem akan mendeteksi seluruh perangkat yang terhubung dengannya. Seperti Bluetooth, sensor infra merah dan sensor ultrasonic.
2. Setelah seluruh perangkat terdeteksi. Sistem akan menunggu perintah pairing yang dilakukan oleh pengguna menggunakan smartphone.
3. Jika proses pairing berhasil maka perangkat robot dan smartphone akan saling terhubung.
4. Jika proses pairing gagal, maka sistem akan meminta pengguna untuk memasukkan kode perangkat secara benar.
5. Proses ini, akan membuat perangkat robot dengan smartphone akan saling
Gambar 3.4 Flowchart konektivitas smartphone dan robot
secara manual dan otomatis menggunakan aplikasi yang telah terpasang pada
smartphone. Adapun tahapan untuk mengendalikan robot dari Gambar 3.5.
adalah:
1. Masukkan aplikasi bot kontrol pada smartphone.
2. Lakukan pair-to-pair terhadap perangkat dan smartphone.
3. Setelah smartphone dan perangkat terhubung, proses selanjutnya yaitu masuk ke dalam menu pengendalian robot untuk menuju lokasi yang sudah terpetakan.
4. Adapun pengendalian yang dilakukan oleh pengguna adalah melakukan pengendalian robot secara otomatis dan manual untuk menuju ke suatu lokasi yang sudah terpetakan.
5. Pada proses pengendalian secara auto digunakan algoritma fuzzy logic untuk menentukan arah gerak berdasarkan posisi awal, adapun contoh pseudocode program adalah:
Start
3.5 Perancangan Antarmuka
Perancangan antarmuka bertujuan untuk merancang tampilan yang dapat menghubungkan pengguna dengan program. Perancangan antarmuka dilakukan sebelum tahapan implementasi sistem agar memudahkan dalam pengembangan sistem.
Perancangan antarmuka dirancang khusus untuk pengguna android dalam mengendalikan pergerakan robot untuk menuju suatu lokasi yang sudah dipetakan. Adapun pengendalian yang dapat dilakukan oleh pengguna dengan menggunakan
smartphone android adalah untuk mengendalikan pergerakan robot secara manual
atau otomatis untuk menuju suatu lokasi yang sudah dipetakan.
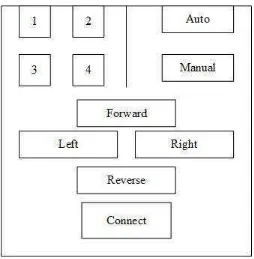
3.5.1 Perancangan Tampilan Utama Aplikasi
Pada gambar 3.6 merupakan rancangan tampilan utama aplikasi smartphone. Di dalam sistem terdapat 10 button yang dapat difungsikan oleh pengguna, yaitu tombol auto, 1, 2, 3, 4, manual, forward, left, right, reverse, dan connect untuk mencari koneksi Bluetooth kepada perangkat robot. Adapun pada prosesnya setiap button mengirimkan karakter kepada prangkat robot untuk menuju suatu lokasi yang sudah dipetakan.
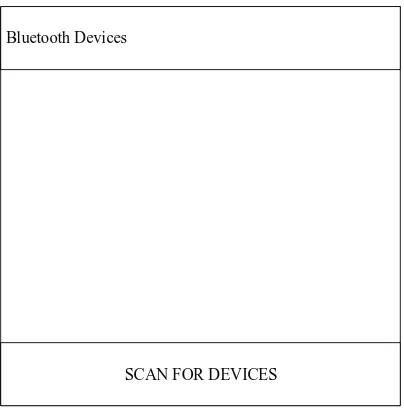
3.5.2 Perancangan Tampilan Device Bluetooth
Pada gambar 3.7 terdapat rancangan tampilan pencarian Bluetooth pada aplikasi smartphone. Di dalam sistem terdapat 1 button yang difungsikan oleh pengguna yaitu tombol scan for device. Tombol tersebut berfungsi untuk mencari perangkat Bluetooth yang terdapat pada robot yang disambungkan oleh smartphone sehingga smartphone dan robot bisa terhubung satu sama lain.
Bluetooth Devices
SCAN FOR DEVICES
Gambar 3.7 Pencarian Device Bluetooth
3.6 Perancangan Perangkat robot
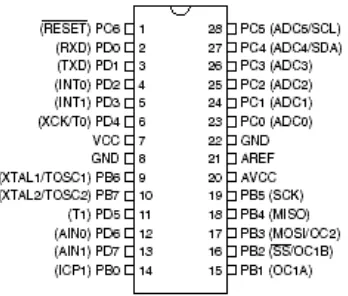
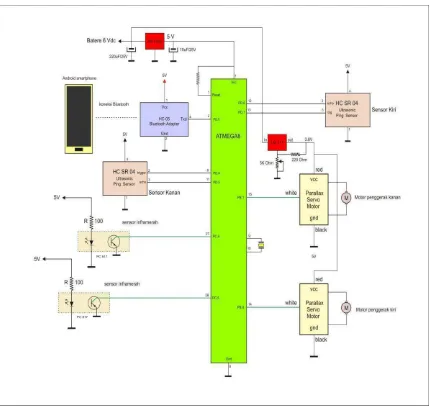
3.6.1 Perancangan Pin ATmega8
Pada ATmega8, terdapat pin yang berfungsi sebagai tempat pengolahan sinyal data,baik bersifat analog maupun digital. pada sistem yang akan dibangun ini, pin dimanfaatkan untuk pengolahan Bluetooth, sensor ultrasonic, sensor infra merah. Yang semua proses dilakukan secara digital.
Adapun pembagian pin yang digunakan adalah: 1. Bluetooth menggunakan 1 slot pin 2. Baterai menggunakan 2 slot pin.
3. 2 Sensor ultrasonic menggunakan 4 slot pin. 4. 2 inframerah menggunakan 2 slot pin. 5. 2 servo motor menggunkan 2 slot pin.
Gambar 3.8 Arsitektur ATmega8
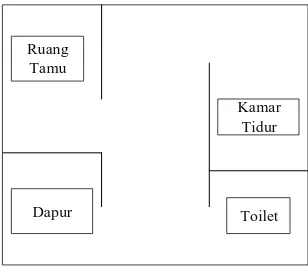
3.6.2 Perancangan Skema lokasi.
Kamar
Tidur
Ruang
Tamu
Dapur
Toilet
Gambar 3.9 Skema Lokasi
3.6.3 Perancangan keseluruhan perangkat keras.
Gambar 3.10 Sistem keseluruhan Adapun proses yang terjadi pada sistem robot adalah:
1. Tegangan listrik dari baterai robot akan menyalakan perangkat robot.
2. Setelah aktif pada ATmega8 akan dicek seluruh perangkat yang terhubung dengannya, seperti Bluetooth, sensor ultrasonic, sensor infra merah.
3. Bluetooth digunakan sebagai penghubung antara robot dengan smartphone
Android. Bluetooth yang telah menyala pada perangkat robot akan menunggu koneksi yang dilakukan pengguna melalui smartphone Android.
BAB 4
IMPLEMENTASI DAN PENGUJIAN SISTEM
4.1 Implementasi Sistem
Bab ini menjelaskan hasil analisis dan perancangan sistem beserta pengujian sistem dalam menggunakan smartphone berbasis Android untuk pengendalian robot menuju suatu lokasi yang sudah dipetakan.
Spesifikasi perangkat lunak (software) dan perangkat keras (hardware) yang digunakan dalam membangun sistem ini adalah sebagai berikut:
1. Sistem operasi yang digunakan adalah Microsoft Windows 7 Ultimate 32-bit. 2. ATmega8.
3. Sensor Ultrasonic & Sensor Inframerah.
4. Processor Intel® Core™ i3-380M CPU @1.70GHz (4CPUs), - 1.7 GHz. 5. Memory 2048MB RAM DDR3.
6. Kapasitas Hardisk 320GB. 7. Code Vision AVR
4.2 Implementasi Perangkat Robot
4.2.1 Implementasi Rangkaian ATmega8
ATmega8 dirangkai di papan PCB yang jalurnya sesuai dengan kebutuhan perangkat. Jalur pada rangkaian PCB akan menghubungkan ATmega8 dengan 2 buah sensor yaitu ultrasonic dan inframerah. Pada ATmega8 akan dimasukkan program sehingga robot dapat dikendalikan secara otomatis ataupun manual menggunakan smartphone.
Gambar 4.1 Rangkaian ATmega8
Gambar 4.2 Rangkaian Pada PCB
4.2.2 Implementasi Rangkaian Bluetooth
Pada gambar 4.3 modul Bluetooth dipasang pada socket papan PCB yang terhubung oleh ATmega8. Bluetooth ini berfungsi untuk menghubungkan smartphone dengan perangkat robot yang ada. Sehingga Bluetooth yang terpasang pada robot berfungsi sebagai penerima perintah yang dikirim melalui smartphone.
Gambar 4.3 Implementasi Bluetooth Adapter
4.2.3 Implementasi Sensor ultrasonic
Gambar 4.4 Implementasi Sensor Ultrasonic
4.2.4 Implementasi Catu Daya
Pada gambar 4.5 catu daya dipasang untuk memberi arus tegangan agar sensor ultrasonic dan infra merah berfungsi dengan baik dan robot dapat berjalan secara manual dan otomatis untuk menuju suatu lokasi yang sudah ditentukan.
4.2.5 Implementasi Sensor Inframerah
Pada gambar 4.6 Sensor inframerah dipasang dengan tujuan untuk membaca garis hitam pada area yang sudah dipetakan sehingga robot dapat bergerak dengan baik.
Gambar 4.6 Implementasi Sensor Infra merah
4.2.6 Denah lokasi
Gambar 4.7 merupakan prototype lokasi atau ruangan yang sudah dibuat dengan papan untuk rute perpindahan robot yang bergerak secara otomatis dari satu ruang ke ruang yang ingin dituju.
4.3 Implemantasi Antar Muka
Tampilan antar muka dirancang pada Smartphone sebagai media penghubung aplikasi dengan robot. Pada penelitian ini, terdapat 2 tampilan antar muka, yaitu menu utama, dan menu Bluetooth.
4.3.1 Tampilan Koneksi Bluetooth.
Menu koneksi Bluetooth adalah sebuah menu yang terdapat di dalam aplikasi yang digunakan oleh pengguna untuk masuk ke dalam sistem lebih dalam dan dapat menggunakan fitur fitur utama di dalam sebuah aplikasi.
Bluetooth digunakan sebagai media penghubung antara smartphone dengan
perangkat robot. Bluetooth yang memanfaatkan teknologi wireless memiliki keterbatasan pada jarak. Untuk itu, perlu indikator untuk menunjukkan Bluetooth masih terhubung atau tidak, untuk mengetahui Bluetooth masih tersambung satu sama lain.
4.3.2 Tampilan Pengendalian Robot
Gambar 4.9. merupakan menu utama pengendalian robot. Pada menu ini, terdapat 11 button yang dapat digunakan oleh pengguna. Adapun fungsi dari kesebelas button tersebut adalah:
1. Tombol auto berfungsi sebagai pengendalian untuk bergerak secara otomatis. 2. Tombol 1 berfungsi sebagai penunjuk lokasi agar robot ke arah lokasi 1. 3. Tombol 2 berfungsi sebagai penunjuk lokasi agar robot ke arah lokasi 2. 4. Tombol 3 berfungsi sebagai penunjuk lokasi agar robot ke arah lokasi 3. 5. Tombol 4 berfungsi sebagai penunjuk lokasi agar robot ke arah lokasi 4. 6. Tombol manual berfungsi sebagai pengendalian untuk bergerak secara manual. 7. Tombol forward berfungsi sebagai penunjuk robot agar bergerak maju.
8. Tombol Reverse berfungsi sebagai penunjuk robot agar bergerak mundur. 9. Tombol left berfungsi sebagai penunjuk robot agar bergerak ke kiri. 10.Tombol right berfungsi sebagai penunjuk robot agar bergerak ke kanan.
11.Tombol connect berfungsi sebagai penghubung antara smartphone dan robot menggunakan media bluetooth.
4.4 Pengujian Kinerja Sistem
Pengujian kinerja sistem dilakukan untuk mengetahui kinerja sistem dalam melakukan pengendalian robot untuk bergerak secara otomatis atapun manual pada area yang terpetakan. Pada pengujian ini terfokus pada akurasi sistem dalam menentukan ruang yang akan dituju. Selain fokus terhadap akurasi, pengujian juga memperhatikan kinerja perangkat yang terpasang pada robot. Karena perangkat yang terpasang pada robot salah satu yang terpenting, karena perangkat yang terpasang merupakan data yang ditangkap oleh sensor harus segera diproses ATmega8 agar robot dapat bergerak dengan baik. Pada pengujian kinerja sistem ini untuk menganalisis pengiriman voltase tersebut terbagi pada dua variasi jarak yaitu 5 voltase, (-+) 5 voltase. Prototype akan dirancang untuk menguji kinerja sistem dengan menggunakan daya yang berasal dari baterai yang terpasang.
Pada penelitian ini, perangkat robot memiliki 2 fungsi utama. Yaitu menggerakkan robot secara manual untuk menuju suatu lokasi dan menggerakkan secara otomatis untuk menuju suatu lokasi yang sudah ditentukan.
Tabel pengujian berfungsi untuk melihat hasil dari pengolahan yang dilakukan oleh perangkat robot serta efeknya terhadap sistem robot. Adapun tabel pengujian perangkat robot dapat dilihat dari Tabel 4.1.
Tabel 4.1. Pengujian Perangkat Robot No Perangkat yang
1 Sensor Ultrasonic Baik Kurang baik 2 Sensor Inframerah Baik Kurang baik
3 Bluetooth Baik Kurang baik
Untuk menguji efektitifitas penggunaan perangkat robot, maka dilakukan pengujian perangkat berdasarkan lokasi. Dengan mempertimbangkan posisi maka dilakukan pengujian untuk menghitung posisi yang baik saat robot tiba dan pergi ke ruang yang ditentukan, adapun hasil pengujian tersebut dapat dilihat dari Tabel 4.2.
Tabel 4.2 Pengujian Posisi Tiba Diruangan
No Lokasi Posisi Tiba
1 Ruang 1 Baik
2 Ruang 2 Baik
3 Ruang 3 Baik
BAB 5
KESIMPULAN DAN SARAN
5.1 Kesimpulan
Kesimpulan yang dapat diambil dari automatisasi untuk menuju suatu lokasi yang sudah ditentukan menggunakan smartphone berbasis android ini adalah:
1. Otomatisasi pergerakan robot untuk menuju suatu lokasi dapat digunakan untuk memodernisasi sistem kursi roda secara otomatis.
2. Smartphone dengan sistem operasi Android dapat mengendalikan robot
menggunakan Bluetooth.
3. Teknologi Bluetooth dapat digunakan untuk mengendalikan robot dari jarak maksimum 15 meter.
4. ATmega8 harus mendapat suplai arus dan tegangan listrik dari baterai yang sesuai agar perangkat sensor dan roda dapat bekerja dengan baik.
5.2Saran
Beberapa saran penulis untuk penelitian selanjutnya. 1. Penelitian lain robot dapat bergerak fleksibel.
2. Pemanfaatan teknologi Bluetooth dapat dikembangkan ke arah penelitian lain yang sejenis.
3. Untuk menggunakan perangkat robot ini, sebaiknya menggunakan penstabil voltase agar perangkat bekerja lebih baik.
BAB 2
LANDASAN TEORI
2.1Android
Android adalah open source platform untuk mobile device. Dikembangkan oleh google bersama Open Handset Alliance (OHA) yaitu aliansi perangkat selular terbuka yang terdiri dari 47 perusahaan hardware, software dan perusahaan telekomunikasi ditujukan untuk mengembangkan standar terbuka bagi perangkat selular. Tujuan aliansi tersebut yaitu menseleksi pembaharuan dalam mobile dan menawarkannya ke konsumen yang lebih kaya, dan sedikit mahal. (Indriyanto. 2015).
Kelebihan Android:
1. Android adalah comprehensive platform, software-nya lengkap.
2. Open source platform, bebas pengembangan tanpa dikenakan biaya terhadap
sistem karena berbasiskan linux.
3. Android adalah purpose-built untuk mobile device. Desain dari android berasal dari waktu mendatang yang dapat diguna.
4. Android juga tidak memakan memori yang terlalu banyak sehingga pengguna tidak terlalu khawatir terhadap software yang memorinya terbatas.
2.2 Bluetooth
Bluetooth adalah teknologi komunikasi tanpa kabel yang menyediakan layanan
media pertukaran data pada berbagai perangkat smartphone termasuk Android. (Rahmiati.2014).
Adapun kelebihan dan kekurangan Bluetooth adalah: 1. Kelebihan Bluetooth adalah:
a. Dapat menembus dinding, kotak, dan sebagaiannya. b. Bersifat nirkabel.
2. Kekurangan Bluetooth adalah:
a. Menggunakan frekuensi yang sama dengan gelombang wifi.
b. Fungsi search tidak optimal jika dalam satu area terdapat Bluetooth dalam jumlah banyak.
c. Tidak bisa dengan jarak yang begitu jauh. 2.3 Robot
Robot secara umum dapat diartikan sebuah sistem yang terdiri dari hardware dan
software yang dapat melakukan tugas tertentu dari manusia. Robot dirancang oleh
manusia untuk membantu bahkan menggantikan kegiatan manusia yang butuh ketelitian dan beresiko tinggi. (Setiawan. 2012). Istilah robot pertama kali muncul pada tahun 1920, berasal dari kata 'robota' yang dalam bahasa Ceko (negeri Eropa Timur) berarti kerja paksa. Kata itu muncul dalam drama pentas Rossum's Universal Robots karya Karel Capek, seorang penulis dari negara Ceko. Kemudian pada tahun 1950, Isaac Asimov mengemukakan dalam novelnya 'Robot', tiga aturan perobotan yaitu:
1. Sebuah robot tidak boleh mencederai manusia.
2. Robot harus mematuhi perintah yang diberikan manusia, kecuali bila itu melanggar aturan pertama.
3. Robot harus melindungi eksistensinya sendiri sebagai mesin yang harus mematuhi manusia.
kebutuhan dalam dunia industri modern. Dewasa ini mereka semakin menuntut adanya suatu alat dengan kemampuan tinggi yang dapat membantu menyelesaikan pekerjaan manusia ataupun menyelesaikan pekerjaan yang tidak mampu diselesaikan manusia.
Pada dasarnya robot dibedakan menjadi dua bagian, yaitu robot mobil dan robot non mobil. Robot mobil adalah konstruksi robot yang ciri khasnya adalah mempunyai aktuator berupa roda untuk menggerakkan keseluruhan badan robot tersebut, sehingga robot tersebut dapat melakukan perpindahan posisi dari satu titik ke titik lain. Non mobile robot merupakan robot yang hanya berdiri pada satu titik tempat secara terus menerus dalam menjalankan fungsinya. Robot jenis ini biasa disebut robot manipulator. Kombinasi antara mobile robot dengan non mobile robot dapat menghasilkan kelompok kombinasi konvensional (mobile dengan non-mobile) serta kelompok non-konvensional. Untuk kelompok pertama sengaja diberi nama konvensional, karena nama yang dipakai dalam konteks penelitian adalah nama-nama yang dianggap umum, seperti mobile manipulator, robot pemanjat (climbing robot), dan walking robot. Sedangkan kelompok non-konvensional dapat berupa robot
humanoid, animaloid, extra-ordinary, atau segala bentuk inovasi penyerupaan yang
bisa dilakukan.
Suatu robot seharusnya memiliki 3 kemampuan yaitu:
1. Kemampuan bergerak, dapat berupa kaki, tangan ataupun roda.
2. Kemampuan indera/sensorik selayaknya manusia seperti penglihatan, pendengaran, keseimbangan, dan lain sebagainya.
3. Kemampuan kecerdasan berfikir untuk mengambil keputusan. Semua kemampuan robot tersebut harus dirancang dan ditentukan oleh pembuatnya. 2.4 Konsep dasar pengontrolan dan perangkat sistem
Suatu sistem pengendalian otomatis dalam suatu proyek berfungsi mengendalikan proses tanpa adanya campur tangan manusia. (Erinofiardi et al 2012).
bisa melakukan pekerjaan dua atau lebih sekaligus. Selain itu, manfaat pengendalian otomatis dapat memperkecil kesalahan yang dilakukan oleh manuisa.
A. Jenis-jenis pengontrolan
1. Sistem kontrol loop terbuka
Sistem kontrol loop terbuka adalah sistem yang menghasilkan output yang tidak berpengaruh terhadap sistem pengontrolan. Dengan demikian output dari pengontrolan tidak digunakan lagi sebagai input.
Dari Gambar 2.1. menggambarkan output dari pengontrolan yang tidak digunakan lagi pada alat kendali. Sehingga proses yang terjadi pada sistem hanya memproses sinyal masukan kemudian mengirimkannya ke alat kendali.
Gambar 2.1. Sistem Pengendali loop terbuka (Erinofriadi et al, 2012)
2. Sistem kontrol loop tertutup
Sistem kontrol loop tertutup adalah sistem yang menggunakan output dari pengolahan pada sistem untuk dijadikan sebagai input didalam sistem. Dengan kata lain, output dari sistem masih berpengaruh terhadap proses kendali kontrol.
Gambar 2.2. Sistem pengendali loop tertutup (Erinofriadi et al, 2012)
Sinyal input merupakan masukan yang akan menentukan suatu nilai yang diharapkan bagi sistem yang dikendalikan. Untuk sistem pengendalian ini sinyal input dihasilkan oleh mikrokontroler.
Gambar 2.2. menyatakan hubungan antara input dan output yang dilakukan didalam sistem kontrol loop tertutup. Sinyal input dibandingkan terlebih dahulu dengan sinyal umpan balik untuk menghasilkan sinyal bersih yang akan dikirimkan ke elemen pengendali untuk menghasilkan sinyal keluaran yang akan dikirim ke alat terkendali.
2.4.1 Mikrokontroler AVR ATmega8
AVR merupakan salah satu jenis mikrokontroler yang di dalamnya terdapat berbagai macam fungsi. Perbedaannya pada mikro yang pada umumnya digunakan seperti MCS51 adalah pada AVR tidak perlu menggunakan
oscillator eksternal karena di dalamnya sudah terdapat internal oscillator.
Selain itukelebihan dari AVR adalah memiliki Power-On Reset, yaitu tidak perlu ada tombol reset dari luar karena cukup hanya dengan mematikan supply, maka secara otomatis AVR akan melakukan reset. Untuk beberapa jenis AVR terdapat beberapa fungsi khusus seperti ADC, EEPROM sekitar 128 byte sampai dengan 512 byte.
diperlukan untuk bekerja. Untuk ATmega8 tipe L, mikrokontroler ini dapat bekerja dengan tegangan antara 2,7 - 5,5 V sedangkan untuk ATmega8 hanya dapat bekerja pada tegangan antara 4,5 – 5,5 V.
Secara umum, mikrokontroler terdiri atas 4 jenis. Masing-masing jenis mikrokontroler tersebut memiliki karakteristik dan fungsi yang berbeda. Adapun ketiga jenis mikrokontroler tersebut adalah:
1. MCS51
Mikrokontroler MCS51 termasuk kedalam bagian dari complex instruction-set
computing (CISC) yang sebagian besar instruksinya dieksekusi dalam 12
siklus. MCS51 memiliki (ROM) dengan kapasitas 64kb dan (RAM) 64kb yang dapat diakses dengan cara memberi jalur pemilihan chip yang terpisah dari chip utama untuk mengakses program dari memori data.
Salah satu kemampuan dari mikrokontroler MCS51 ini adalah pemasukan aljabar Boolean yang mengizinkan operasi algoritma dalam tingkatan satuan –bit dapat dilakukan secara langsung dalam register internal dan akses RAM. Oleh karena itu, MCS51 digunakan dalam rancangan awal
Programmable Logic Control (PLC).
2. Alv and Vegard’s Risc (AVR)
Microcontroler AVR adalah kontroler utama pada sebuah sistem. Dia dapat
mengontrol semua perangkat pada sistem. (Bhangali et al, 2013).
Mikrokontroler AVR merupakan microcontroler tipe Reduce Instruction
Set Computing (RISC) 8 bit. Karena pemrosesan dilakukan secara RISC, sebagian
besar instruksinya dikemas kedalam satu siklus clock.
Secara umum, AVR dikelompokkan kedalam 4 kelas. Perbedaan disetiap
kelasnya adalah kapasitas memori, peripheral dan fungsi. Adapun keempat kelas
tersebut adalah ATTiny, AT90Sxx, ATMega dan AT86RFxx.
3. PIC
PIC merupakan mikrokontroler tipe Reduce Instruction Set Computing (RISC).
PIC dilengkapi dengan EPROM dan komunikasi serial, UAT, kernel kontrol
motor, dan memori program dari 512 word hingga 32 word. Word merupakan
4. ARM
ARM (Advance RISC Machine) merupakan mikrokontroler tipe RISC yang
dikembangkan oleh ARM limited. Pada awalnya merupakan prosesor desktop
yang didominasi oleh x86 bit. Hanya saja, arsitektur ARM dinilai tidak sesuai
dengan kebutuhan desktop sehingga ARM lebih cenderung digunakan pada
smartphone.
2.4.2 Fuzzy logic
Dalam kamus Oxford, istilah fuzzy didefinisikan sebagai blurred (kabur atau remang-remang), indistinct (tidak jelas), imprecisely defined (didefenisikan secara tidak presisi), confused (membingungkan), vague (tidak jelas) (Agus Naba. 2009,).
Kendali fuzzy logic memberikan alternatif lain dalam sistem kendali. Dalam kendali fuzzy logic tidak diperlukan model matematika dari sistem karena kendali fuzzy logic bekerja berdasarkan rule-rule yang diekstrak sesuai dengan pemikiran dan pengetahuan manusia baik sebagai operator atau ahli.
Dalam penelitian ini disajikan implementasi kendali fuzzy logic untuk penentuan lokasi yang akan dituju. Proses fuzzy inference dalam kendali fuzzy
logic terdiri atas 3 bagian yaitu fuzzifikasi, evaluasi rule dan defuzzifikasi.
Fuzzifikasi mengubah nilai crisp input menjadi nilai fuzzy input. Proses
evaluasi rule mengolah fuzzy input sehingga menghasilkan fuzzy output.
Defuzzifikasi mengubah fuzzy output menjadi nilai crisp output. Gambar 2.3 menunjukkan tahapan – tahapan fuzzy logic.
1. Fuzzifikasi
Fuzzifikasi yaitu suatu proses untuk mengubah suatu masukkan dari bentuk tegas (crisp) menjadi fuzzy (variabel linguistik) yang biasanya disajikan dalam bentuk himpunan-himpunan fuzzy dengan suatu fungsi kenggotaannya masing-masing.
2. Evaluasi Aturan (Inference Engine)
Evaluasi rule merupakan proses pengambilan keputusan (inference) yang berdasarkan rule-rule yang ditetapkan pada basis rule untuk menghubungkan antar peubah-peubah fuzzy masukan dan peubah fuzzy keluaran. Rule-rule ini berbentuk jika …maka (IF ... THEN).
Ada 2 proses pada inference Engine:
1. Aggregation: proses penghitungan pada IF
2. Composition: proses penghitungan pada Then
3. Defuzzifikasi
Menurut I Made Budi Suksmadana (2011), defuzzifikasi merupakan proses mencari nilai dari variabel linguistik berdasarkan derajat keanggotaannya yang dimiliki. Dalam proses defuzzifikasi menghasilkan keluaran (output) yang diinginkan dari proses sebelumnya. Proses defuzzifikasi memiliki keluaran fungsi keanggotaan yang berupa garis vertical (singleton).
2.4.3 Sensor ultrasonic
Sensor ultrasonik adalah sebuah sensor yang berfungsi untuk mengubah besaran fisis (bunyi) menjadi besaran listrik dan sebaliknya. Cara kerja sensor ini didasarkan pada prinsip dari pantulan suatu gelombang suara sehingga dapat dipakai untuk menafsirkan eksistensi (jarak) suatu benda dengan frekuensi tertentu. Disebut sebagai sensor ultrasonik karena sensor ini menggunakan gelombang ultrasonik (bunyi ultrasonik).
oleh telinga manusia. Bunyi ultrasonik dapat didengar oleh anjing, kucing, kelelawar, dan lumba-lumba. Bunyi ultrasonik nisa merambat melalui zat padat, cair dan gas. Reflektivitas bunyi ultrasonik di permukaan zat padat hampir sama dengan reflektivitas bunyi ultrasonik di permukaan zat cair. Akan tetapi, gelombang bunyi ultrasonik akan diserap oleh tekstil dan busa.
Gambar 2.4 Ultrasonic (Sumber Data Sheet HC-SR04)
2.4.4 Sensor infra merah
Cahaya infra merah merupakan cahaya yang tidak tampak. Jika dilihat dengan spektroskop cahaya maka radiasi cahaya infra merah akan terlihat pada spektrum elektromagnet dengan panjang gelombang di atas panjang gelombang cahaya merah. Radiasi inframerah memiliki panjang gelombang antara 700 nm sampai 1 mm dan berada pada spektrum berwarna merah. Dengan panjang gelombang ini maka cahaya infra merah tidak akan terlihat oleh mata namun radiasi panas yang ditimbulkannya masih dapat dirasakan/dideteksi.
Pada pembuatan komponen yang dikhususkan untuk penerima infra merah, lubang untuk menerima cahaya (window) sudah dibuat khusus sehingga dapat mengurangi interferensi dari cahaya non-infra merah. Oleh sebab itu sensor infra merah yang baik biasanya memiliki jendela (pelapis yang terbuat dari silikon) berwarna biru tua keungu-unguan. Sensor ini biasanya digunakan untuk aplikasi infra merah yang digunakan diluar rumah.
Sinar infra merah yang dipancarkan oleh pemancar infra merah tentunya mempunyai aturan tertentu agar data yang dipancarkan dapat diterima dengan baik pada penerima. Oleh karena itu baik di pengirim infra merah maupun penerima infra merah harus mempunyai aturan yang sama dalam mentransmisikan (bagian pengirim) dan menerima sinyal tersebut kemudian mendekodekannya kembali menjadi data biner (bagian penerima). Komponen yang dapat menerima infra merah ini merupakan komponen yang peka cahaya yang dapat berupa dioda (photodioda) atau transistor (phototransistor). Komponen ini akan merubah energi cahaya, dalam hal ini energi cahaya infra merah, menjadi pulsa-pulsa sinyal listrik. Komponen ini harus mampu mengumpulkan sinyal infra merah sebanyak mungkin sehingga pulsa-pulsa sinyal listrik yang dihasilkan kualitasnya cukup baik.
2.5 Penelitian Terdaulu
Tahun 2010 Anita, N.S. melakukan penelitian untuk robot membuat robot micromouse dengan menggunakan algoritma depth-first search secara otomatis, dan robot tersebut dipasangkan sensor inframerah untuk mengikutin garis hitam, dan robot tersebut tidak memliki pengendalian, robot tersebut mencari jalur yang akan dilewatinya dari titik satu ke titik yang lain.
Tahun 2012 Febriani, R. & Suprijadi. melakukan penelitian untuk mengontrol robot menggunakan sensor kamera dengan memanfaatkan camera robot tersebut dapat mengenali suatu objek yang sudah ditentukan dan mengikuti kemanapun objek itu pergi. Kontrol gerak robot menggunakan metode random
walks berbasis citra.
Tahun 2015 Indriyanto, C. melakukan penelitian untuk melakukan pengendalian robot menggunakan smartphone dengan media Bluetooth robot tersebut dapat menerima perintah yang dikirim dengan smartphone seperti: maju, mundur, kanan, dan kiri.
Tahun 2015 Choudhury, N. & Singh, T. C. melakukan penelitian untuk pengendalian robot menggunakan suara dan menggunakan algoritma pointbug. Pengendalian robot ini menggunakan smartphone dari smartphone mengirim perintah suara dari API google, sehingga robot dapat menerima pesan suara itu dengan baik.
No. Judul Peneliti Metode Keterangan
BAB 1
PENDAHULUAN
1.1Latar Belakang
Pada saat ini teknologi robot banyak digunakan di dunia industri untuk melakukan proses produksi. Robot digunakan untuk menggantikan pekerjaan manusia yang dianggap sulit dan membahayakan manusia, manusia hanya perlu mengendalikan robot disuatu tempat dan dapat melakukan perkerjaan yang lain yang lebih aman dan lebih manusiawi.
Penggunaan robot untuk menunjang kebutuhan sehari-hari sangat berperan penting untuk perkembangan teknologi informasi. Macam-macam bentuk robot, Robot mobile, Robot jaringan, Robot manipulator (Tangan), Robot Humanoid,Robot Berkaki, Robot Terbang (Flying Robot), dan Robot Dalam Air (Under Water Robot). Robot tersebut telah banyak diaplikasikan dalam kehidupan sehari-hari dan berguna untuk menggantikan kegiatan manusia yang dianggap sulit dan berbahaya.
Beberapa penelitian sebelumnya telah dilakukan untuk menyelesaikan permasalahan robot. Contohnya yaitu penelitian (Choudhury, et al., 2015) mengenai
Voice Controlled BOEbot using PointBug Algorithm for Human Robot Interaction
using Android Technology. Berdasarkan hasil penelitiannya, pengguna dapat
Pada penelitian ini, penulis mengusulkan membangun sistem pergerakan robot pada area terpetakan dengan dukungan teknologi sensor. Titik awal dari lokasi untuk peregerakan robot ini sudah ditentukan. Target input dari aplikasi ini adalah lokasi tujuan. Untuk memudahkan pergerakan robot, diperlukan suatu alat bantu sebagai pemberi informasi yaitu sensor. Penulis akan menggunakan sensor ultrasonik dan infra merah yang berfungsi mengirimkan informasi objek yang menghalangi pergerakan robot dan sensor infra merah sebagai pembaca garis hitam untuk membantu pergerakan robot agar lebih baik. Selanjutnya, Perintah tersebut akan dikirim dengan menggunakan media Bluetooth dan diolah menjadi perintah yang akan dijalankan robot sehingga tidak terjadi benturan dengan objek yang ada di depannya dan dapat bergerak secara otomatis ke lokasi yang sudah dituju.
Berdasarkan latar belakang di atas, maka penulis mengajukan proposal penelitian dengan judul “Automatisasi Pergerakan Robot Pada Area Terpetakan Menggunakan Algoritma Fuzzy Logic”.
1.2Rumusan Masalah
Kesulitan orang disabilitas (cacat, sakit) untuk bergerak membuat mereka tidak dapat hidup dengan mandiri. Orang dengan disabilitas membutuhkan alat bantu untuk bergerak berpindah dari satu tempat ke tempat yang ingin dituju. Untuk itu dibutuhkan suatu solusi yang dapat membantu orang disabilitas untuk berpindah dari satu ruang ke ruang yang lain secara otomatis.
1.3Batasan Masalah
Adapun batasan masalah yang akan dibahas adalah:
1. Robot Bergerak berdasarkan tempat atau skema yang sudah ditetapkan. 2. Hanya terdapat empat ruangan.
3. Titik awal sudah ditentukan.
1.4Tujuan Penelitian
Manfaat dari penelitian ini yaitu:
1. Memodernisasi sistem kursi roda secara otomatis untuk bergerak dari satu ruang keruang lain secara otomatis.
2. Menjadi referensi untuk penelitian selanjutnya dalam pengembangan di bidang
computer system.
1.6 Metodologi
Terdapat beberapa tahapan pada penelitian ini adalah sebagai berikut: 1. Studi Literatur
Studi literatur dilakukan dalam rangka mengumpulkan dan mempelajari informasi-informasi dari buku, makalah, jurnal, atau sumber referensi lain mengenai Atmega8, sensor ultrasonic, sensor inframerah dan metode untuk menentukan arah gerak berdasarkan titik awal.
2. Analisis Permasalahan
Pada tahap ini dilakukan analisis terhadap bahan referensi yang telah dikumpulkan sebelumnya untuk mendapatkan pemahaman mengenai metode yang akan digunakan untuk diimplementasikan dalam permasalahan menentukan arah gerak berdasarkan titik awal.
3. Perancangan
Pada tahap ini dilakukan perancangan perangkat lunak yang dibangun, seperti perancangan arsitektur dan antarmuka sistem. Proses perancangan dilakukan berdasarkan hasil analisis terhadap studi literatur yang sudah dikumpulkan.
4. Implementasi
Pada tahap ini dilakukan implementasi terhadap analisis yang telah dilakukan ke dalam pembangunan program sesuai dengan alur yang ditentukan.
5. Pengujian
6. Penyusunan Laporan
Pada tahap ini dilakukan penulisan laporan mengenai seluruh penelitian yang telah dilakukan.
1.7Sistematika Penulisan
Sistematika penulisan pada skripsi ini terdiri dari lima bagian utama antara lain sebagai berikut:
Bab 1: Pendahuluan
Bab ini berisi tentang latar belakang dari penelitian yang dilaksanakan, rumusan masalah, batasan masalah, tujuan penelitian, manfaat penelitian, dan sistematika penulisan.
Bab 2: Landasan Teori
Bab ini merupakan kumpulan referensi yang berkaitan dengan penelitian, baik dari buku-buku yang memuat pemecahan masalah dari penelitian maupun informasi yang diperoleh melalui internet.
Bab 3: Analisis dan Perancangan Sistem
Pada tahap ini dilakukan perancangan sesuai dengan hasil dari analisis sistem dan dilanjutkan dengan mengimplementasi hasil analisis dan perancangan ke dalam sistem.
Bab 4: Implementasi dan Pengujian Sistem
Bab ini membahas tentang implementasi dari analisis dan perancangan yang telah disusun pada bab 3 dan pengujian untuk mengetahui apakah hasil yang didapatkan sesuai dengan yang diharapkan.
Bab 5: Kesimpulan dan Saran
ABSTRAK
Kesulitan orang disabilitas (cacat, sakit) untuk bergerak membuat mereka tidak dapat hidup dengan mandiri. Orang dengan disabilitas membutuhkan alat bantu untuk berpindah dari satu tempat ke tempat yang ingin dituju. Untuk itu dibutuhkan suatu solusi yang dapat membantu orang disabilitas untuk berpindah dari satu ruang ke ruang yang lain secara otomatis. Penelitian ini bertujuan untuk membuat suatu prototipe kursi roda berupa robot beroda sebagai sarana mempelajari mobilasi secara otomatis orang yang menderita disabilitas menggunakan algoritma fuzzy logic sebagai penentuan arah gerak berdasarkan posisi awal, sensor ultrasonic sebagai pemberi informasi untuk halangan yang berada didepan dan disamping agar tidak terjadi benturan, sensor infra merah sebagai pembaca garis hitam agar robot bergerak dengan baik dan smartphone sebagai pengendali sistem robot tersebut untuk berpindah. Hasil pengujian menunjukkan bahwa algoritma yang diajukan mampu bekerja stabil untuk melakukan penentuan arah gerak secara otomatis berdasarkan posisi awal dan mampu memodernisasi sistem kursi roda otomatis untuk pindah dari satu ruang ke ruang yang lain.
AUTOMATION ROBOT MOVEMENT IN MAPPED AREA USING ALGORITHM FUZZY LOGIC
ABSTRACT
Limitation of disabled people to move have made them live uncomfortably. Disabled people need a tool to help them moving from one place to another. Therefore, solution is needed for the disabled people to move from one place to another automatically. The objective of this research is to make prototype of wheel chair in the form of a wheel robot as a tool in learning automatic mobilization of disabled people by using fuzzy logic algorithm in determining the direction of motions based on the first position, ultrasonic sensor as the informer of existed obstacles to avoid the bumps, infrared sensor as black line reader in order to make the robot works well and smartphone as the robot system controller. The result of this research shows that the said algorithm is able to work well both in determining the direction of motions automatically based on the first position and in modernizing the system of automatic wheel chair to move from one place to another.
SKRIPSI
Hariadi Ramadhana 111402026
PROGRAM STUDI S1 TEKNOLOGI INFORMASI
FAKULTAS ILMU KOMPUTER DAN TEKNOLOGI INFORMASI UNIVERSITAS SUMATERA UTARA
OTOMATISASI PERGERAKAN ROBOT PADA AREA TERPETAKAN MENGGUNAKAN ALGORITMA FUZZY LOGIC
SKRIPSI
Diajukan untuk melengkapi tugas dan memenuhi syarat memperoleh ijazah Sarjana Teknologi Informasi
HARIADI RAMADHANA 111402026
PROGRAM STUDI S1 TEKNOLOGI INFORMASI
FAKULTAS ILMU KOMPUTER DAN TEKNOLOGI INFORMASI UNIVERSITAS SUMATERA UTARA
PERSETUJUAN
Judul : OTOMATISASI PERGERAKAN ROBOT PADA AREA TERPETAKAN MENGGUNAKAN ALGORITMA FUZZY LOGIC
Kategori : SKRIPSI
Nama : HARIADI RAMADHANA
Nomor Induk Mahasiswa : 111402026
Program Studi : S1 TEKNOLOGI INFORMASI
Fakultas : ILMU KOMPUTER DAN TEKNOLOGI
INFORMASI UNIVERSITAS SUMATERA UTARA Komisi Pembimbing :
Diketahui/ disetujui oleh
Program Studi S1 Teknologi Informasi Ketua,
Muhammad Anggia Muchtar, ST., MM.IT NIP. 19800110 200801 1 010
Pembimbing 2
Baihaqi Siregar, S.Si, M.T NIP. 19790108 201212 1 002
Pembimbing 1
PERNYATAAN
OTOMATISASI PERGERAKAN ROBOT PADA AREA TERPETAKAN MENGGUNAKAN ALGORITMA FUZZY LOGIC
SKRIPSI
Saya mengakui bahwa skripsi ini adalah hasil karya saya sendiri, kecuali beberapa kutipan dan ringkasan yang masing-masing telah disebutkan sumbernya.
Medan, Juni 2016
UCAPAN TERIMA KASIH
Segala puji dan syukur penulis sampaikan kepada Tuhan Yang Maha Esa yang telah memberikan berkat-Nya yang melimpah sehingga penulis dapat menyelesaikan skripsi ini dengan baik untuk memperoleh gelar Sarjana Komputer, Program Studi S1 Teknologi Informasi Universitas Sumatera Utara.
Skripsi ini penulis persembahkan kepada orangtua penulis, ayahanda Misnan dan Ibunda Linawati br Perangin-angin yang selalu memberikan doa, semangat, dukungan, perhatian, kasih sayang, dan pengorbanan. Semoga Allah SWT memberikan kebahagiaan kepada kedua orangtua penulis.
Penulis menyadari bahwa penelitian ini tidak akan terwujud tanpa bantuan banyak pihak. Dengan kerendahan hati, penulis ucapkan terima kasih kepada :
1. Bapak Dr. Syahril Efendi, S.Si.M.IT sebagai dosen pembimbing I dan Bapak Baihaqi Siregar, S.Si,M.T sebagai dosen pembimbing II yang telah meluangkan waktu, pikiran, saran, dan kritiknya untuk penulis dalam menyelesaikan skripsi ini.
2. Ketua dan Sekretaris Program Studi S1 Teknologi Informasi, Bapak M. Anggia Muchtar, S.T., MM.IT. dan bapak Mohammad Fadly Syahputra, B.Sc.,M.Sc.IT.
3. Bapak Dedy Arisandi, ST., M.Kom selaku dosen pembimbing akademik yang selalu memberi saran dalam proses akademik penulis.
4. Seluruh dosen yang mengajar serta staf Tata Usaha Program Studi Teknologi Informasi Universitas Sumatera Utara.
6. Semua pihak yang terlibat langsung ataupun tidak langsung yang tidak dapat penulis ucapankan satu persatu yang telah membantu menyelesaikan skripsi ini.
ABSTRAK
Kesulitan orang disabilitas (cacat, sakit) untuk bergerak membuat mereka tidak dapat hidup dengan mandiri. Orang dengan disabilitas membutuhkan alat bantu untuk berpindah dari satu tempat ke tempat yang ingin dituju. Untuk itu dibutuhkan suatu solusi yang dapat membantu orang disabilitas untuk berpindah dari satu ruang ke ruang yang lain secara otomatis. Penelitian ini bertujuan untuk membuat suatu prototipe kursi roda berupa robot beroda sebagai sarana mempelajari mobilasi secara otomatis orang yang menderita disabilitas menggunakan algoritma fuzzy logic sebagai penentuan arah gerak berdasarkan posisi awal, sensor ultrasonic sebagai pemberi informasi untuk halangan yang berada didepan dan disamping agar tidak terjadi benturan, sensor infra merah sebagai pembaca garis hitam agar robot bergerak dengan baik dan smartphone sebagai pengendali sistem robot tersebut untuk berpindah. Hasil pengujian menunjukkan bahwa algoritma yang diajukan mampu bekerja stabil untuk melakukan penentuan arah gerak secara otomatis berdasarkan posisi awal dan mampu memodernisasi sistem kursi roda otomatis untuk pindah dari satu ruang ke ruang yang lain.
AUTOMATION ROBOT MOVEMENT IN MAPPED AREA USING ALGORITHM FUZZY LOGIC
ABSTRACT
Limitation of disabled people to move have made them live uncomfortably. Disabled people need a tool to help them moving from one place to another. Therefore, solution is needed for the disabled people to move from one place to another automatically. The objective of this research is to make prototype of wheel chair in the form of a wheel robot as a tool in learning automatic mobilization of disabled people by using fuzzy logic algorithm in determining the direction of motions based on the first position, ultrasonic sensor as the informer of existed obstacles to avoid the bumps, infrared sensor as black line reader in order to make the robot works well and smartphone as the robot system controller. The result of this research shows that the said algorithm is able to work well both in determining the direction of motions automatically based on the first position and in modernizing the system of automatic wheel chair to move from one place to another.
DAFTAR ISI
1.7 Sistematikan Penulisan 4
BAB 2 LANDASAN TEORI 5
2.1 Android 5
2.2 Bluetooth 5
2.3 Robot 6
2.4 Konsep Dasar Pengontrolan dan Perangkat Sistem 7
2.4.1 Mikrokontroler AVR ATmega8 9
2.4.2 Fuzzy Logic 10
2.4.3 Sensor Ultrasonik 13
2.4.4 Sensor Infra Merah 13
2.5 Peneliti Terdahulu 15
BAB 3 ANALISIS DAN PERANCANGAN 17
3.1 Arsitektur Umum 17
3.2 Analisis Sistem 19
3.3 Metode Penelitian 22
3.4 Flowchart Sistem 23
3.5 Perancangan Antarmuka 27
3.5.1 Perancangan Tampilan Utama Aplikasi 27
3.5.2 Perancangan Device Bluetooth 28
3.6 Perancangan Perangkat Robot 28
3.6.1 Perancangan Pin ATmega8 29
3.6.2 Perancangan Skema Lokasi 30
3.6.3 Perancangan Keseluruhan Perangkat Keras 31
BAB 4 IMPLEMENTASI DAN PENGUJIAN SISTEM 32
4.1 Implementasi Sistem 32
4.2 Implementasi Perangkat Robot 33
4.2.1 Implementasi Rangkaian ATmega8 33
4.2.2 Implementasi Rangkaian Bluetooth 34
4.2.3 Implementasi Sensor Ultrasonik 35
4.2.4 Implementasi Catu Daya 35
4.2.5 Implementasi Sensor Inframerah 36
4.2.6 Denah Lokasi 37
4.2.7 Pengujian Perangkat 37
4.3 Implementasi Antar Muka 38
4.3.1 Tampilan Koneksi Bluetooth 38
4.3.2 Tampilan Pengendali Robot 39
4.4 Pengujian Kinerja Sistem 40
BAB 5 KESIMPULAN DAN SARAN 42
5.1 Kesimpulan 42
5.2 Saran 43
DAFTAR TABEL
Hal.
Tabel 2.1. Penelitian terdahulu 16
Tabel 3.1 Perancangan Sistem Use Case Diagram 22
Tabel 4.1. Pengujian Perangkat Robot 40
DAFTAR GAMBAR
Hal. Gambar 2.1 Sistem Pengendalian Loop Terbuka 8 Gambar 2.2 Sistem Pengendalian Loop Tertutup 9 Gambar 2.3 Tahapan – Tahapan Fuzzy Logic 12
Gambar 2.4 Ultrasonic 13
Gambar 2.5 Lambang Inframerah dan Bentuk Fisiknya 15
Gambar 3.1 Arsitektur Umum 17
Gambar 3.2 Diagram Proses Pengontrolan Penggerakan Robot
Menggunakan Smartphone 20
Gambar 3.3 Perancangan Sistem Menggunakan Use Case Diagram 21 Gambar 3.4 Flowchart Konektivitas antara Smartphone dan Robot 23 Gambar 3.5 Flowchart Sistem Pengendalian Pergerakan Robot Menuju Suatu
Lokasi Yang Sudah Ditentukan 25
Gambar 3.6 Form Untuk Pengendalian Robot 26
Gambar 3.7 Pencarian Device Bluetooth 27
Gambar 3.8 Arsitektur ATmega8 28
Gambar 3.9 Skema Lokasi 39
Gambar 3.10 Sistem Keseluruhan 30
Gambar 4.1. Rangkaian ATmega8 33
Gambar 4.2. Rangkaian Pada PCB 34
Gambar 4.3. Implementasi Bluetooth Adapter 34 Gambar 4.4. Implementasi Sensor Ultrasonic 35
Gambar 4.5. Implementasi Catu Daya 36
Gambar 4.6. Implementasi Sensor Inframerah 36
Gambar 4.7. Denah Lokasi 37
Gambar 4.8. Pencarian Koneksi Bluetooth di Smartphone 39