38
IMPLEMENTASI METODE FUZZY LOGIC PADA SISTEM NAVIGASI ROBOT
HEXSAPOD PENDETEKSI KORBAN BENCANA ALAM
Difa Adhi Satria1, Pola Risma1, Masayu Anisah1
1Jurusan Teknik Elektro Program Studi Sarjana Terapan Teknik Elektro Konsentrasi Mekatronika
Politeknik Negeri Sriwijaya [email protected]
ABSTRACT
Natural disaster is a disaster caused by nature and can not be avoided, such as earthquake that can cause loss of properties and human lives. In the survival process survivors must be immediately undertaken to mitigate the adverse impacts, but information about the victim's position is not yet known and the environment around the disaster site is still very dangerous to review, make it very risky for the rescue team to go directly to the site. This research purpose design simulation with fuzzy logic method for navigation system hexapod robot victim disaster detectoe using scilab 5.5.2 application. This fuzzy logic method serves as a robot navigation system so that the robot can determine its own direction of movement. This hexapod robot is equipped with several sensors such as peer sensor that serves to detect the presence or absence of the victim and ultrasonic sensors to avoid obstruction.
Keywords: Natural Disaster, Hexapod, Fuzzy logic
ABSTRAK
Bencana alam merupakan suatu bencana yang disebabkan oleh alam dan tidak bisa dihindari, seperti gempa bumi yang dapat menyebabkan kerugian harta benda dan jatuhnya korban jiwa manusia. Dalam proses penyelamat korban yang masih hidup harus segera dilakukan untuk mengurangi dampak buruk yang ditimbulkan, namun informasi tentang posisi korban belum diketahui dan lingkungan disekitar lokasi bencana masih sangat berbahaya untuk ditinjau, sehingga sangat berisiko bagi tim penyelamat untuk turun langsung ke lokasi tersebut. Penelitian ini bertujuan untuk membuat simulasi metode fuzzy logic pada sistem navigasi robot hexapod pendeteksi korban bencana alam menggunakan aplikasi scilab 5.5.2. Metode fuzzy logic ini berfungsi sebagai sistem navigasi robot agar robot dapat menentukan sendiri arah gerakannya. Robot hexapod ini dilengkapi dengan beberapa sensor seperti sensor pir yang berfungsi untuk mendeteksi ada atau tidaknya korban dan sensor ultrasonik untuk menghindar halangan.
39
PENDAHULUAN
Bencana alam merupakan suatu bencana yang disebabkan oleh alam (MOHAMAD JAMIL, 2016), salah satu bencana alam yang sering terjadi di perkotaan nyaitu gempa bumi. Gempa bumi merupakan bencana alam yang tidak bisa dihindari dan bisa terjadi dimana saja, contohnya yang terjadi diprovinsi banten pada tanggal 24 januari 2018. Dampak buruk yang di akibatkan oleh gempa bumi diantarnya runtuhnya bangunan, jatuhnya korban jiwa, dan kerugian harta benda. Runtuhnya bangunan yang disebabkan oleh gempa bumi dapat menyebabkan banyaknya korban jiwa dikarenakan korban tertimbun reruntuhan, diantara korban jiwa yang tertimbun oleh reruntuhan mungkin masih ada yang hidup dan membutuhkan pertolongan secepatnya (SALAHUDDIN, 2013).
Proses penyelamatan korban bencana alam harus segera dilakukan untuk mengurangi resiko yang diakibatkan oleh bencana tersebut seperti banyaknya jatuh korban jiwa akibat terlambatnya proses evakuasi. Namun hal ini sangat beresiko bagi tim penyelamat, dikarenakan lokasi yang mereka tinjau masih sangat berbahanya (SYADZA SAUSAN, 2016). Oleh karena itu dibutuhkan sebuah robot yang dapat menggantikan tugas dari tim penyelamat dalam mencari lokasi korban bencana alam, sehingga tidak jatuhnya korban jiwa dari tim penyelamat.
Saat ini ada banyak jenis robot yang dapat digunakan untuk mendeteksi lokasi dari korban bencana alam salah satunya adalah robot beroda dan berkaki. Robot beroda merupakan jenis robot yang banyak digunakan dalam berbagai aplikasi karena kecepatannya dalam melintasi bidang yang rata dan kemudahan dalam mendesain serta implementasinya. Namum, dalam dunia nyata sering terdapat kondisi bidang tidak rata, sehingga digunakan robot berkaki. Kelebihan dari robot berkaki terdapat pada gerak robot yang dapat bergerak didaerah yang rata maupun yang tidak rata, memanjat tangga, menghindar, dan melangkah diatas halangan (Mohd IQBAL,2015). Salah satu jenis jenis robot berkaki yang paling banyak digunakan yaitu robot berkaki enam (Hexapod).
Pada penelitian ini akan dibuat simulasi metode
fuzzy logic untuk sistem navigasi robot hexapod
pendeteksi posisi korban bencana alam menggunakan aplikasi scilab 5.5.2. Metode fuzzy
logic merupakan suatu metode untuk memindahkan
atau meniru pengetahuan manusia ke dalam mesin. Penggunaan Metode fuzzy logic pada robot hexapod ini berfungsi sebagai sistem navigasi robot, sehingga robot dapat bergerak menuju lokasi korban bencana
dengan cepat dan tanpa menabrak halangan. Metode fuzzy logic juga berfungsi agar robot dapat membuat keputusan sendiri dari permasalah yang tidak pasti atau samar yang mempunyai banyak jawaban.
TEORI DASAR
RobotAda banyak defenisi yang dikemukakan oleh para ahli mengenai robot. Orang awam beranggapan bahwa robot mengandung pengertian suatu alat yang menyerupai manusia, namun struktur tubuhnya tidak menyerupai manusia melainkan terbuat dari logam.
Hexapod
Sesuai dari namanya hexapod robot adalah jenis mobile robot yang bergerak menggunakan 6 (enam) kaki dan memiliki fleksibilitas yang tinggi.
Kelebihan :
1. Kestabilan posisi robot diatas permukaan lebih baik daripada biped dan quadrapod.
2. Dapat bergerak diberbagai permukaan, baik kasar maupun halus.
3. Posisi bodi tinggi diatas kaki sehingga
menghindari gesekan yang berlebihan dengan permukaan.
Kekurangan:
1. Memerlukan biaya riset cukup tinggi.
2. Pergerakan relatif lamban dikarenakan rumitnya koordinasi gait dari tiap servo.
3. Tingkat kerumitan dalam mengatur pergerakan
servo.
Sensor PIR
Sensor pir merupakan sebuah sensor yang biasa digunakan untuk mendeteksi keberadaan manusia. Bentuk fisik dari sensor pir dapat dilihat pada Gambar 1.
Gambar 1. Tampilan Sensor PIR Sumber: Gagat Mughni Pradipta, 2016
Sensor Ultrasonik
Sensor ultrasonik merupakan alat elektronika yang dapat mengubah energi listrik menjadi energi mekanik dalam bentuk gelombang suara dengan frekuensi di atas 20 kHz. Sensor ultrasonik terdiri dari rangkaian pemancar ultrasonik yang disebut
40
disebut receiver. Bentuk fisik dari sensor ultrasonik dapat dilihat pada Gambar 2.
Gambar 2. Tampilan Sensor Ultrasonik Sumber: Hadijaya Pratama,2012
Arduino Mega2560
Arduino Mega2560 adalah papan mikrokontroler berbasiskan ATmega2560. Arduino Mega 2560 memiliki 54 pin digital input/output, dimana 15 pin dapat digunakan sebagai output PWM, 16 pin sebagai input analog, dan 4 pin sebagai UART (port
serial hardware), 16 MHz kristal osilator, koneksi
USB, jack power, header ICSP, dan tombol reset. Bentuk fisik dari arduino mega2560 dapat dilihat pada Gambar 3.
Gambar 3. Tampilan Arduino Mega2560 Sumber : Gagat Mughni Pradipta, 2016
METODE
Metode yang digunakan pada robot hexapod pendeteksi korban bencana alam ini yaitu metode
fuzzy logic. Metode fuzzy logic merupakan suatu
metode untuk memindahkan atau meniru pengetahuan manusia ke dalam mesin. Ada dua jenis fuzzy yang biasa digunakan yaitu mamdani dan sugeno. Metode fuzzy logic pada Robot hexapod pendeteksi korban bencana alam yang akan dibuat di aplikasi scilab 5.5.2 adalah fuzzy logic jenis mamdani.
Cara kerja dari robot hexapod pendeteksi korban bencana dapat dilihat pada diagram blok sehingga keseluruhan diagram blok akan menghasilkan suatu sistem yang dapat bekerja. Diagram blok pada robot
hexapod pendeteksi korban bencana alam dapat
dilihat pada Gambar 4.
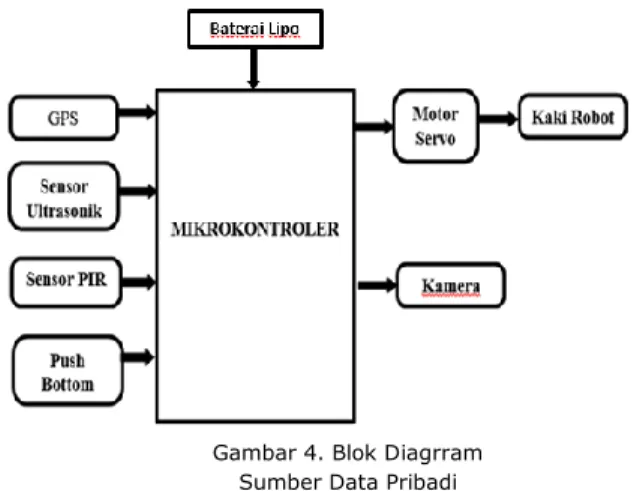
Gambar 4. Blok Diagrram Sumber Data Pribadi
Sistem blok diagram pada gambar 4 terdiri dari 4 buah input dan 2 buah output. Blok input meliputi sensor ultrasonik yang berfungsi untuk menghindari halangan, sensor pir berfungsi untuk mendeteksi ada atau tidaknya korban, gps berfungsi untuk meberikan kordinat dari posisi korban bencana alam dan push buttom sebagai input pada kaki robot
hexapod, apabila input sensor-sensor telah
mendapatkan data sesuai dengan kerja masing-masing sensor, maka data tersebut akan diolah oleh mikrokontroler. Pada saat mikrokontroler telah selesai mengola data, maka mikrokontoler akan mengirim perintah ke motor servo untuk begerak sesuai data dari inputan yang telah diolah oleh mikrokontoler. Saat robot telah tiba diposisi korban bencana alam maka robot akan mengambil gambar korban dan menyimpan hasil gambar ke memori.
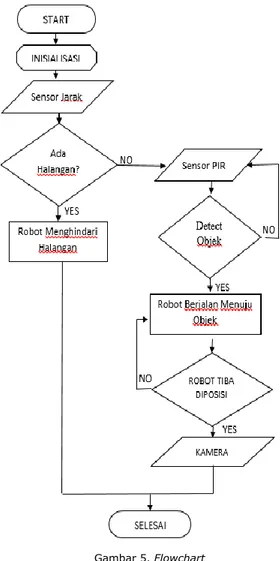
Dalam menentukan perancangan pada penelitian diperlukan sebuah diagram aliran Flowchart untuk mengetahui alur kerja dari suatu sistem. Diagram aliran Flowchart pada robot hexapod ini dapat dilihat pada Gambar 5.
41
Gambar 5. Flowchart Sumber : Data pribadi
HASIL DAN PEMBAHASAN
Hasil dari peneilitian ini berupa rule base fuzzy
logic. Rule base adalah keadaan yang mungkin
terjadi pada system, Rule base pada system navigasi robot hexapod pendeteksi korban bencana alam juga berfungsi sebagai indicator/set point untuk navigasi pada robot. Pada robot hexapod pendeteksi korban bencana alam ini terdapat 16 rule base yang dapat dilihat pada Tabel 1.
Tabel 1. Rule base Fuzzy logic pada robot hexapod pendeteksi korban bencana alam
Sumber : Data Pribadi
Keterangan pada rule base fuzzy logic diatas terdiri dari sensor ultrasonik kiri, sensor ultrasonik depan, sensor ultrasonik kanan dan sensor pir sebagai input robot hexapod sedangkan gerakan robot dan kamera sebagai output. X>15 cm merupakan jarak yang terukur oleh sensor input lebih dari 15 cm sedangkan X≤15 cm merupakan jarak yang terukur oleh sensor kurang dari 15 cm. untuk bagian output pada sensor kamera terdiri dari
ON dan OFF, pada saat kondisi kamera ON maka
kamera akan menggambil gambar sedang pada saat kamera dalam kondisi OFF maka kamera tidak menggambil gambar.
Untuk mengolah datanya dari rule base fuzzy
logic, didapat dari sensor ultrasonik dan sensor pir
yang kemudian diubah kedalam bentuk fuzzifikasi sedangkan output robot hexapod diubah kedalam bentuk defuzzifikasi
.
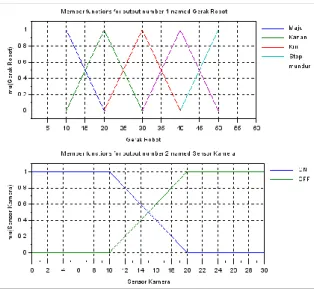
Grafik input dan output fuzzy logic yang diterapakan pada robot hexapod pendeteksi korban bencana alam dapat dilihat pada Gambar 6 dan 7.
Gambar 6. Grafik Input fuzzy logic robot hexapod pendeteksi korban bencana alam
42
Gambar 7. Grafik Output fuzzy logic robot hexapod pendeteksikorban bencana alam Sumber : Data pribadi
Grafik fuzzy logic yang menjadi acuan dalam perbandingan data pada hexapod pendeteksi korban bencana alam dalam bentuk 3D dan dapat dilihat pada Gambar 8.
Gambar 8 Grafik 3D hubungan input dan output fuzzy logic pada robot hexapod pendeteksi korban bencana alam
Sumber : Data Pribadi
KESIMPULAN DAN SARAN
Dari hasil pengujian, dapat disimpulkan bahwa penerapan metode fuzzy logic dapat diterapkan pada sistem navigasi robot hexapod pendeteksi korban bencana alam. Metode fuzzy logic pada robot
hexapod pendeteksi korban bencana alam ini
mempunyai 4 buah input yang terdiri dari sensor ultrasonik kiri, ultrasonik depan, ultrasonik kanan, dan sensor Pir sedang untuk output terdiri dari gerak robot dan sensor kamera.
Pada pengujian sensor ultrasonik dan sensor pir, terdapat beberapa jenis inputan yang dipilih, mulai dari jarak kurang dari 15 cm dan jarak lebih dari 15 cm. Inputan dari sensor ultrasonik dan sensor pir akan berpengaruh pada output yang diperoleh seperti gerakan robot apakah robot bergerak maju atau belok. Hal tersebut dapat dilihat pada Fuzzy
rules yang telah dibuat. Hasil dari penelitian ini dapat
dilanjutkan dalam bentuk penerapan langsung pada robot hexapod. Untuk pengembangan selanjutnya dapat dilakukan dengan meningkatkan kemampuan robot seperti menambahkan sensor yang lain contohnya menambahkan module Sim 900 yang berfungsi untuk mengirimkan hasil kordinat dari posisi korban bencana alam ke handphone agar proses penyelamat korban bencana alam dapat segera dilakukan.
REFERENSI
Jamil, Mohamad. 2016. “Implementasi Teknologi
Wireless Sensor Network (WSN) Untuk
Monitoring Pergeseran Tanah”. Jurnal Protek Vol.03 No.2 (hlm. 46-89). Maluku Utara. Salahuddin,Dkk. 2013. “Rancang Bangun Robot
Pencari Korban Bencana Alam Dengan Kontrol
Wireless Modulasi FM (Frequency Modulation)
– FSK (Frequency Shift Keying). Jurnal Litek (ISSN:1693-8097) Vol.10 No.2 (hlm. 80-83) , Lhokseumawe.
Sausan, Syadza. 2016. “Robot Pointer Sebagai Penunjuk Jalan Tim SAR Untuk Mempermudah Pencarian Korban Bencana Gempa”. Jurnal Rekayasa Elektrika Vol. 13 No.2 (hlm.112-118). Banda Aceh.
Iqbal, Mohd. 2015. “Penerapan Forward Chaining Pada Navigasi Robot Kaki Enam” Prosiding Seminar Ilmiah Nasional Teknologi Komputer (SENATKOM 2015) Vol 1. Batam.
Pradipta, gagat Mughni.2016. “Pembuatan Prototipe Sistem Keamanan Laboratorium Berbasis Arduino Mega”. Prosiding Seminar Nasional Fisik (E-Journal) SNF2016 Vol.V. Bogor. Pratama, Hadijaya. 2012. “Akuisisi Data Kinerja
Sensor Ultrasonik Berbasis Sistem Komunikasi Serial Menggunakan Mikrokontroler ATMEGA 32” Electrans Vol.11 No.2 (hlm.36-43). Bandung.