WATERPASS DIGITAL MENGGUNAKAN SENSOR ACCELEROMETER BERBASIS MIKROKONTROLER AT MEGA 8535
TUGAS AKHIR
M. PUTRA SUKATENTEL 112411017
PROGRAM STUDI D-3 METROLOGI DAN INSTRUMENTASI DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATERA UTARA
WATERPASS DIGITAL MENGGUNAKAN SENSOR ACCELEROMETER BERBASIS MIKROKONTROLER AT MEGA 8535
TUGAS AKHIR
Diajukan untuk melengkapi tugas dan memenuhi syarat memperoleh Ahli Madya
M.PUTRA SUKATENDEL 112411017
PROGRAM STUDI D-3 METROLOGI DAN INSTRUMENTASI DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATERA UTARA
LEMBAR PERSETUJUAN
Judul : WATERPASS DIGITAL MENGGUNAKAN SENSOR ACCELEROMETER BERBASIS MIKROKONTROLER AT MEGA 8535 Kategori : TUGAS AKHIR
Nama : M PUTRA SUKATENDEL Nomor Induk Mahasiswa : 112411017
Program Studi : D-III METROLOGI DAN INSTRUMENTASI Fakultas : MATEMATIKA DAN ILMU
PENGETAHUAN ALAM (FMIPA) UNIVERSITAS SUMATERA UTARA
DISAHKAN
Komisi Pembimbing:
Ketua Program Studi Dosen Pembimbing I
D-III Metrologi Dan Instrumentasi Tugas Akhir
Dr.Diana A. Barus, M.Sc Dr.Diana A.Barus, M.Sc
PERNYATAAN
WATERPASS DIGITAL MENGGUNAKA SENSOR
ACCELEROMETER BERBASIS AT MEGA 8535
Tugas Akhir
Saya mengakui bahwa tugas akhir ini adalah hasil kerja saya sendiri, kecuali beberapa
kutipan dan ringkasan yang masing-masing disebutkan sumbernya.
Medan, Juli 2014
PENGHARGAAN
Alhamdulillahirobbil’alamin,
Segala puji dan syukur bagi Allah SWT yang telah melimpahkan barokah,
rahmat, hidayah-Nya dan menganugerahkan kemudahan serta kelancaran sehingga
penulis dapat menyelesaikan penulisan tugas proyek ini sesuai waktu yang telah
ditetapkan. Sholawat dan salam semoga senantiasa tercurahkan kepada Rasulullah
Sallallahu’alaihiwassalam sang pembawa petunjuk dan selalu menjadi inspirasi dan
teladan bagi penulis
Tugas akhir ini disusun untuk melengkapi persyaratan dalam mencapai gelar
Ahli Madya pada Program Studi Diploma Tiga (III) Metrologi dan Instrumentasi
Departemen Fisika Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas
Sumatera Utara.
Adapun judul Tugas Akhir ini adalah
WATERPASS DIGITAL MENGGUNAKAN SENSOR
ACCELEROMETER BERBASIS MIKROKONTROLER AT
MEGA 8535
Penulis menyadari bahwa tersusunnya Laporan Tugas Akhir ini dari Do’a,
perhatian, bimbingan, motivasi dan dukungan berbagai pihak, sehingga dengan
keikhlasan dan kerendahan hati pada kesempatan ini penulis mengucapkan terima
kasih yang sebesar-besarnya kepada :
1. Bapak Sutarman S.Si, M.Si selaku dekan Fakultas Matematika dan Ilmu
2. Bapak Dr.Marhaposan Situmorang selaku ketua departemen Fisika Fakultas
Matematika dan Ilmu Pengetahuan Alam Universitas Sumatera Utara
3. Ibu Dr. Diana Alemin Barus M.Sc selaku Ketua Program Studi D3 Metrologi
dan Instrumentasi Fakultas Matematika Dan Ilmu Pengetahuan Alam
Uniuversitas Sumatera Utara
4. Ibu Dr. Diana Alemin Barus M.Sc selaku dosen pembimbing saya yang
menbantu dalam menyelesaikan alat dan penulisan laporan ini.
5. Seluruh Dosen dan Karyawan Program Studi Diploma Tiga (III) Metrologi dan
Instrumentasi Departemen Fisika Fakultas Matematika dan Ilmu Pengetahuan
Alam Universitas Sumatera Utara.
6. Kedua Orang Tua Yang saya sayangi yang telah mendukung dan memberikan
semangat untuk saya dalam menyelesaikan laporan tugas akhir ini.
7. Teman Teman saya Annisayyubi Izzati, Astriana Christy Bangun, Coky Y.S
Ritonga serta teman-teman Metrologi dan Instrumentasi Angkatan 2011 yang
telah membatu dan memberikan dukungan moril kepada penulis dalam
menulis laporan Tugas Akhir.
Penulis menyadari sepenuhnya bahwa dalam pembuatan Tugas Akhir ini masih
jauh dari kesempurnaan, untuk itu penulis mengharapkan kritik dan saran dari
pembaca yang bersifat ny membangun dalam penyempurnaan Tugas Akhir ini.
Semoga laporan ini menjadi ibadah yang baik bagi penulis dan menjadi ilmu yang
bermanfaat bagi pembaca.
Amin Yaa Rabbal’alamin
Medan, Juli 2014
ABSTRAK
Pada Projek Akhir ini penulis membahas masalah yang berjudul
“WATERPASS DIGITAL MENGGUNAKAN SENSOR ACCELEROMETER
BERBASIS MIKROKONTROLER AT MEGA 8535”. Alat ini berfungsi mengukur
elevasi / peil sutu bidang untuk kegiatan kalibrasi, tera dan tera ulang Dimana Tugas
akhir ini menggunakan Sensor accelerometer, AT Mega 8535 sebagai
mikrokontroler, LED 2x16 sebagi keluarannya dan baterai 9V sebai sumber arus.
Mikrokontroler AT Mega 8535 mempunyai input berbentuk sensor, sensor
accelerometer ini akan mendeteksi kemiringan suatu bidang kemudian
ABSTRACT
In this final project addressed the issue entitled "WATERPASS DIGITAL
ACCELEROMETER SENSOR USING MICROCONTROLLER AT MEGA 8535".
This tool is used to measure the elevation / peil an activity field for calibration
activities, calibration and re-calibration Where This thesis uses the accelerometer
sensor, the AT Mega 8535 microcontroller, LED output and 2x16 as a current source
Sebai 9V battery. AT Mega 8535 microcontroller input has shaped sensor,
accelerometer sensor will detect the tilt of a field then display the measurement results
DAFTAR ISI
BAB 2 LandasanTeori...5
2.1 Sensor Accelerometer………...5
2.2 Mikrokontroler AT Mega 8535………11
BAB 3 Rancangan Sistem………15
3.1 Diagram Blok dan Cara Kerja Rangkaian………..15
3.2 Perancangan Rangkaian Catu Daya………16
3.3 Perancangan Rangkaian dengan Mikrokontroller………..17
3.4 Perancangan sistem modul accelerometer………...18
3.5 Flowchart sistem……….19
BAB 4 Analisa Rangkaian………...20
4.1 Pengujian Rangkaian Power Supply………...20
4.2 PengujianMikrokontrol ATM 8535………20
4.3 Pengujian Accelero Sensor……….22
4.4 Interfacing LCD 2x14……….23
BAB 5 Kesimpulan Dan Saran………...25
5.1 Kesimpulan……….25
5.2 Saran ………..25
ABSTRAK
Pada Projek Akhir ini penulis membahas masalah yang berjudul
“WATERPASS DIGITAL MENGGUNAKAN SENSOR ACCELEROMETER
BERBASIS MIKROKONTROLER AT MEGA 8535”. Alat ini berfungsi mengukur
elevasi / peil sutu bidang untuk kegiatan kalibrasi, tera dan tera ulang Dimana Tugas
akhir ini menggunakan Sensor accelerometer, AT Mega 8535 sebagai
mikrokontroler, LED 2x16 sebagi keluarannya dan baterai 9V sebai sumber arus.
Mikrokontroler AT Mega 8535 mempunyai input berbentuk sensor, sensor
accelerometer ini akan mendeteksi kemiringan suatu bidang kemudian
ABSTRACT
In this final project addressed the issue entitled "WATERPASS DIGITAL
ACCELEROMETER SENSOR USING MICROCONTROLLER AT MEGA 8535".
This tool is used to measure the elevation / peil an activity field for calibration
activities, calibration and re-calibration Where This thesis uses the accelerometer
sensor, the AT Mega 8535 microcontroller, LED output and 2x16 as a current source
Sebai 9V battery. AT Mega 8535 microcontroller input has shaped sensor,
accelerometer sensor will detect the tilt of a field then display the measurement results
BAB 1 PENDAHULUAN
1.1 Latar belakang
Instrumentasi adalah alat-alat dan piranti (device) yang dipakai untuk pengukuran
dan pengendalian dalam suatu sistem yang lebih besar dan lebih kompleks.
Instrumentasi sebagai
bagian-bagian selanjutnya (bagian kendalinya) dan bisa berupa pengukur dari semua
jenis besaran fisis, kimia, mekanis, maupun besaran listrik. Beberapa contoh di
antaranya adalah : alat ukur
listrik density dan lain
sebagainya.
Elektronika dan Instrumentasi merupakan cabang
menggabungkan antara pengetahua
dalam suatu
diperlukan untuk mendukung sistem pengukuran dan pengontrolan instrumentasi dari
industri yang dikendalikan.
Perkembangan dan kemajuan teknologi telah menciptakan banyak alat-alat yang
mampu mempermudah dan mempercepat pekerjaan manusia. Alat-alat bantu ini
menggunakan sistem instrumentasi atau elektronika digital yang banyak digunakan
di tempat-tempat umum terlebih pada transaksi pedagangan. Pengukuran dalam
menggunakan sistem instrumen yang sudah dikembangkan teknologinya karena
ketepatan dalam pengukuran sangat diperlukan.
Mengukur kedataran elevasi / peil sutu bidang menggunakan waterpass yang
masih manual tetapi tentang kepastian pengukuran waterpass adalah kurang maka
akan mempengaruhi kegiatan kalibrasi, tera dan tera ulang yang dilakukan
tujuannya untuk mendapatkan hasil yang presisi dengan kesalahan yang masih
dibawah batas kesalahan yang diizinkan (BKD) dari latar belakang tersebut maka
dirancanglah sebuah alat yaitu waterpass digital dengan menggunakan sensor
accelerometer untuk mendapatkan suatu hasil pengukuran yang akurat, dapat
dipercaya, serta dengan kesalahan pengukuran yang cukup kecil
Sensor accelerometer adalah suatu alat untuk mengukur percepatan sehingga
dapat mendeteksi adanya perubahan posisi device dan berapa banyak perubahan itu
terjadi, sensor ini telah banyak dipakai di beberapa bidang seperti pada windows
phone, namun kali ini sensor diaplikasikan sebagai sensor pada perancangan alat ukur
yaitu waterpass digital. Sensor akselometer sangatlah cocok digunakan pada
perancangan waterpass digital ini karena sifat sensor yang peka terhadap tekanan yang
diberikan terhadap lingkungannya bahkan ketika diletakkan diatas meja sekalipun bisa
terjadi variasi data sehingga kemungkinan kesalahan adalah 0-1.
Karena sedikitnya yang mengembangkan tentang alat ukur kedataran khususnya
unuk mencari elevasi atu peil suatu bidang, maka dibuatlah WATERPASS DIGITAL
MENGGUNAKAN SENSOR ACCELOMETER BERBASIS MIKROKONTROLER
AT MEGA 8535 agar mempermudah dalam mendapatkan elevasi atau peil dengan
akurat.
1.3Batasan Masalah
Penulis membatasi ruang lingkup, hal ini di lakukan agar pembatasannya tidak
menyimpang tentang kedataran menggunakan sensor accelerometer. Batasan masalah
dalam pembuatan tugas akhir ini mengenai aplikasi sensor dan mikrokontroler
sehingga didapat kedataran suatu bidang.
1.4Sistem Penulisan
Adapun Tujuan pembuatan sistem penulisan tugas akhir ini adalah untuk lebih
mudahkan penulis dalam membuat dan menyelesaikan permasalah yang dianalisis
sehingga lebih terarah dan terfokus. Adapaun sistematika penulisan laporan tugas
akhir ini adalah sebagai berikut :
BAB 1 : PENDAHULUAN
Dalam bab ini penulis menguraikan tentang latar belakang penulis,
Batasan Masalah, rumusan masalah, maksud dan tujuan penelitian,
metode pengumpulan data dan sistem penulisan.
Dalam bab ini dijelaskan tentang teori pendukung yang digunakan
untuk pembahasan dan cara kerja dari rangkaian teori pendukung itu
antara lain tentang elevasi atau peil, sensor accelerometer ,dan
mikrokontroler AT Mega 8535
BAB 3 : PERANCANGAN ALAT DAN PROGRAM
Membahas tentang perencanaan sistem dan pembuatan sistem secara
keseluruhan.
BAB 4 : PENGUJIAN RANGKAIAN DAN ANALISA PROGRAM
Berisi tentang uji coba alat yang telah dibuat, pengoperasian dan
spesifikasi alat dan lain-lain
BAB 5 : KESIMPULAN DAN SARAN
Merupakan kesimpulan dari pembahasan pada bab-bab sebelumnya
BAB 2
TINJAUAN TEORI
2.1 Sensor Accelerometer
Percepatan merupakan suatu keadaan berubahnya kecepatan terhadap waktu.
Bertambahnya suatu kecepatan dalam suatu rentang waktu disebut juga percepatan
(acceleration). Jika kecepatan semakin berkurang daripada kecepatan sebelumnya,
disebut deceleration.
Bergantung pada arah/orientasi karena merupakan penurunan kecepatan yang
merupakan besaran vektor. Berubahnya arah pergerakan suatu benda akan
menimbulkan percepatan pula. Untuk memperoleh data jarak dari sensor
accelerometer, diperlukan proses integral ganda terhadap keluaran sensor.
s = (∫( ∫(�) dt)dt ...(1)
Proses penghitungan ini dipengaruhi oleh waktu cuplik data, sehingga jeda waktu
cuplik data (dt) harus selalu konstan dan dibuat sekecil mungkin Secara sederhana,
Gambar 2.3 Pengintegralan sederhana terhadap suatu sinyal
Accelerometer adalah sebuah perangkat yang mampu mengukur sebuah kekuatan
akselerasi. Kekuatan ini mungkin statis (diam) seperti halnya kekuatan konstan dari
gravitasi Bumi, atau bisa juga bersifat dinamis karena gerakan atau getaran dari
sebuah alat akselerometer.
Gambar 2.1 sensor accelerometer
Accelerometer adalah sebuah tranduser yang berfungsi untuk mengukur percepatan, mendeteksi dan mengukur getaran, ataupun untuk mengukur percepatan
akibat gravitasi bumi. Accelerometer juga dapat digunakan untuk mengukur getaran
yang terjadi pada kendaraan, bangunan, mesin, dan juga bisa digunakan untuk
mengukur getaran yang terjadi di dalam bumi, getaran mesin, jarak yang dinamis, dan
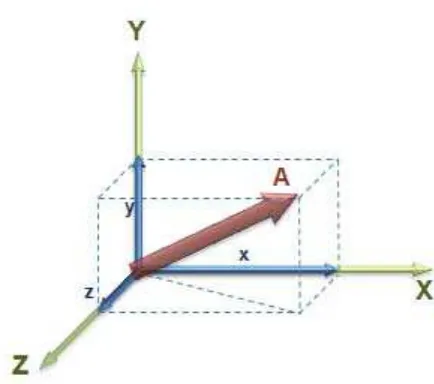
Gambar 2.2 sensor accelerometer vector dan sumbu
Prinsip kerja dari tranduser ini berdasarkan hukum fisika bahwa apabila suatu
konduktor digerakkan melalui suatu medan magnet, atau jika suatu medan magnet
digerakkan melalui suatu konduktor, maka akan timbul suatu tegangan induksi pada
konduktor tersebut. Accelerometer yang diletakan di permukaan bumi dapat
mendeteksi percepatan 1g (ukuran gravitasi bumi) pada titik vertikalnya, untuk
percepatan yang dikarenakan oleh pergerakan horizontal maka accelerometer akan
mengukur percepatannya secara langsung ketika bergerak secara horizontal. Hal ini
sesuai dengan tipe dan jenis sensor Accelerometer yang digunakan karena setiap jenis
sensor berbeda-beda sesuai dengan spesifikasi yang dikeluarkan oleh perusahaan
pembuatnya. Saat ini hamper semua sensor/tranduser accelerometer sudah dalam
bentuk digital (bukan dengan sistem mekanik) sehingga cara kerjanya hanya
bedasarkan temperatur yang diolah secara digital dalam satu chip. Berikut ini adalah
gambar bagaimana proses accelerometer analog (dengan sistem mekanik maupun
Accelerometer analog yang bekerja berdasarakan sistem mekanik
Kebanyakan accelerometers adalah Micro-Electro-Mechanical Sensor (MEMS).
Prinsip dasar operasi balik accelerometer MEMS adalah perpindahan kecil dari massa
yang terukir di permukaan silikon dari sirkuit terintegrasi dan ditangguhkan oleh
balok kecil. Konsisten dengan hukum kedua Newton tentang gerak (F = ma), sebagai
percepatan diterapkan untuk perangkat, kekuatan berkembang yang menggusur massa.
Dukungan balok bertindak sebagai pegas, dan cairan (biasanya udara) terjebak di
dalam IC bertindak sebagai peredam, menghasilkan urutan kedua sistem fisik
disamakan. Ini adalah sumber dari bandwidth yang terbatas dan respon frekuensi
non-seragam accelerometers
Sebuah accelerometer memiliki spesifikasi dasar sebagai berikut:
1. I/O = Analog / digital
Analog vs digital: Spesifikasi yang paling penting dari sebuah accelerometer untuk
aplikasi tertentu adalah jenisnya output. Analog accelerometers keluaran tegangan
variabel konstan tergantung pada jumlah percepatan diterapkan. Digital
accelerometers output frekuensi gelombang persegi variabel, metode yang dikenal
sebagai modulasi lebar pulsa. Sebuah lebar pulsa termodulasi accelerometer
mengambil pembacaan pada tingkat bunga tetap, biasanya 1000 Hz (meskipun ini
mungkin dikonfigurasi pengguna didasarkan pada IC yang dipilih). Nilai percepatan
sebanding dengan lebar pulsa (atau duty cycle) dari sinyal PWM.
2. Jumlah sumbu
Accelerometers tersedia ukuran itu dalam satu, dua, atau tiga dimensi. Jenis yang
paling akrab tindakan accelerometer di dua sumbu. Namun, accelerometers tiga
3. Rentang output (swing maksimum)
Accelerometers tersedia ukuran itu dalam satu, dua, atau tiga dimensi. Jenis yang
paling akrab tindakan accelerometer di dua sumbu. Namun, accelerometers tiga
sumbu semakin umum dan murah.
4. Sensitivitas (tegangan output per g)
Sebuah indikator dari jumlah perubahan sinyal output untuk perubahan yang diberikan
dalam akselerasi. Sebuah accelerometer sensitif akan lebih tepat dan mungkin lebih
akurat. .
5. dynamic range
Rentang antara percepatan terkecil terdeteksi oleh accelerometer ke terbesar sebelum
distorsi atau kliping sinyal output.
6. Bandwidth
Bandwidth dari sensor biasanya diukur dalam Hertz dan menunjukkan batas respon
frekuensi dekat-kesatuan sensor, atau seberapa sering membaca handal dapat diambil.
Manusia tidak bisa membuat gerakan tubuh yang jauh di luar jangkauan 10-12 Hz.
Untuk alasan ini, bandwidth 40-60 Hz memadai untuk memiringkan atau motion
sensing manusia. Untuk pengukuran getaran atau pembacaan yang akurat dari pasukan
dampak, bandwidth harus dalam kisaran ratusan Hertz. Hal ini juga harus dicatat
bahwa untuk beberapa mikrokontroler yang lebih tua, bandwidth accelerometer dapat
melampaui frekuensi Nyquist dari konverter A / D pada MCU, sehingga bandwidth
penginderaan tinggi, sinyal digital dapat alias. Hal ini dapat diatasi dengan sederhana
pasif low-pass filter sebelum pengambilan sampel, atau hanya memilih mikrokontroler
accelerometer dipasang. A pemasangan kaku (ex: menggunakan kancing) akan
membantu untuk menjaga rentang frekuensi yang dapat digunakan lebih tinggi dan
sebaliknya
7. stabilitas amplitudo
Stabilitas amplitudo menggambarkan perubahan sensor dalam sensitivitas tergantung
pada aplikasinya, misalnya melalui berbagai suhu atau waktu
8. massa
Massa accelerometer harus secara signifikan lebih kecil dari massa sistem yang akan
dimonitor sehingga tidak mengubah karakteristik dari objek yang diuji
Dengan mengukur sejumlah akselerasi statis dari gravitasi, dapat menemukan
kemiringan sudut sebuah perangkat terhadap bumi. Dengan merasakan jumlah
akselerasi dinamis dapat menganalisa bagaimana sebuah perangkat berpindah atau
bergerak.
2.2 Mikrokontroler AT Mega 8535
Mikrokontroler adalah IC yang dapat diprogram berulang kali, baik ditulis atau
dihapus (Agus Bejo, 2007). Biasanya digunakan untuk pengontrolan otomatis dan
manual pada perangkat elektronika.
Beberapa tahun terakhir, mikrokontroler sangat banyak digunakan terutama
dalam pengontrolan robot. Seiring perkembangan elektronika, mikrokontroler dibuat
semakin kompak dengan bahasa pemrograman yang juga ikut berubah. Salah satunya
menggunakan teknologi RISC (Reduce Instruction Set Computing) dimana program
berjalan lebih cepat karena hanya membutuhkan satu siklus clock untuk mengeksekusi
satu instruksi program. Secara umum, AVR dapat dikelompokkan menjadi 4 kelas,
yaitu kelas ATtiny, keluarga AT90Sxx, keluarga ATmega, dan AT86RFxx. Pada
dasarnya yang membedakan masing-masing kelas adalah memori, peripheral, dan
fungsinya. Dari segi arsitektur dan instruksi yang digunakan, mereka bisa dikatakan
hampir sama.
Mikrokontroler AVR ATmega8535 memiliki fitur yang cukup lengkap.
Mikrokontroler AVR ATmega8535 telah dilengkapi dengan ADC internal, EEPROM
internal, Timer/Counter, PWM, analog comparator, dll (M.Ary Heryanto, 2008).
Sehingga dengan fasilitas yang lengkap ini memungkinkan kita belajar mikrokontroler
keluarga AVR dengan lebih mudah dan efisien, serta dapat mengembangkan
kreativitas penggunaan mikrokontroler ATmega8535.
Fitur-fitur yang dimiliki oleh mikrokontroler ATmega8535 adalah sebagai berikut:
1. Saluran I/O sebanyak 32 buah, yaitu port A, port B, port C, dan port D.
2. ADC internal sebanyak 8 saluran.
3. Tiga buah Timer/Counter dengan kemampuan pembandingan.
4. CPU yang terdiri atas 32 buah register.
5. SRAM sebesar 512 byte.
6. Memori Flash sebesar 8 kb dengan kemampuan Read While Write.
7. Port antarmuka SPI
8. EEPROM sebesar 512 byte yang dapat diprogram saat operasi.
9. Antarmuka komparator analog.
ATmega8535 merupakan tipe AVR yang telah dilengkapi dengan 8 saluran
ADC internal dengan fidelitas 10 bit. Dalam mode operasinya, ADC ATmega8535
dapat dikonfigurasi, baik secara single ended input maupun differential input. Selain
itu, ADC ATmega8535 memiliki konfigurasi pewaktuan, tegangan referensi, mode
operasi, dan kemampuan filter derau yang amat fleksibel, sehingga dengan mudah
disesuaikan dengan kebutuhan ADC itu sendiri.
ATmega8535 memiliki 3 modul timer yang terdiri dari 2 buah timer/counter 8
bit dan 1 buah timer/counter 16 bit. Ketiga modul timer/counter ini dapat diatur dalam
mode yang berbeda secara individu dan tidak saling mempengaruhi satu sama lain.
Selain itu, semua timer/counter juga dapat difungsikan sebagai sumber interupsi.
Masing-masing timer/counter ini memiliki register tertentu yang digunakan untuk
mengatur mode dan cara kerjanya.
Serial Peripheral Interface (SPI) merupakan salah satu mode komunikasi
serial syncrhronous kecepatan tinggi yang dimiliki oleh ATmega8535. Universal
Syncrhronous and Asyncrhronous Serial Receiver and Transmitter (USART) juga
merupakan salah satu mode komunikasi serial yang dimiliki oleh ATmega8535.
USART merupakan komunikasi yang memiliki fleksibilitas tinggi, yang dapat
digunakan untuk melakukan transfer data baik antar mikrokontroler maupun dengan
modul-modul eksternal termasuk PC yang memiliki fitur UART.
USART memungkinkan transmisi data baik secara syncrhronous maupun
Pada ATmega8535, secara umum pengaturan mode syncrhronous maupun
asyncrhronous adalah sama. Perbedaannya hanyalah terletak pada sumber clock saja.
Jika pada mode asyncrhronous masing-masing peripheral memiliki sumber clock
sendiri, maka pada mode syncrhronous hanya ada satu sumber clock yang digunakan
secara bersama-sama. Dengan demikian, secara hardware untuk mode asyncrhronous
hanya membutuhkan 2 pin yaitu TXD dan RXD, sedangkan untuk mode syncrhronous
harus 3 pin yaitu TXD, RXD dan XCK.
Pemrograman mikrokontroler ATmega8535 dapat menggunakan low level
language (assembly) dan high level language (C, Basic, Pascal, JAVA,dll) tergantung
compiler yang digunakan (Widodo Budiharto, 2006). Bahasa Assembler
mikrokontroler AVR memiliki kesamaan instruksi, sehingga jika pemrograman satu
jenis mikrokontroler AVR sudah dikuasai, maka akan dengan mudah menguasai
pemrograman keseluruhan mikrokontroler jenis mikrokontroler AVR. Namun bahasa
assembler relatif lebih sulit dipelajari dari pada bahasa C.
Untuk pembuatan suatu proyek yang besar akan memakan waktu yang lama
serta penulisan programnya akan panjang. Sedangkan bahasa C memiliki keunggulan
dibanding bahasa assembler yaitu independent terhadap hardware serta lebih mudah
untuk menangani project yang besar. Bahasa C memiliki keuntungan-keuntungan
yang dimiliki bahasa assembler (bahasa mesin), hampir semua operasi yang dapat
dilakukan oleh bahasa mesin, dapat dilakukan dengan bahasa C dengan penyusunan
program yang lebih sederhana dan mudah. Bahasa C terletak diantara bahasa
pemrograman tingkat tinggi dan assembly (Agus Bejo,2007).
tersebut adal
bahasa perantaranya. Selain AVRStudio, ada beberapa software pihak ketiga yang
dapat digunakan untuk membuat program pada AVR. Software dari pihak ketiga ini
menggunaka
seperti code vision AVR. Untuk melakukan pemindahan dari komputer ke dalam chip,
dapat digunakan beberapa cara seperti menggunaka
BAB III
RANCANGAN SISTEM
3.1. Diagram Blok dan Cara Kerja Rangkaian
Berikut ini adalah diagram blok dari rangkaian yang dibuat:
Gambar 3.1. Diagram Blok Rangkaian
a. Power supply berfungsi sebagai sumber tegangan dari seluruh sistem agar
sistem dapat bekerja.
b. AVR ATmega8535 merupakan pusat kendali dari seluruh rangkaian. Dimana
mikrokontroller akan mengecek sinyal yang dikirimkan oleh sensor, kemudian
memprosesnya dan mengirimkan perintah ke ISD2560
3.2 Perancangan Rangkaian Catu Daya
Rangkaian ini berfungsi untuk mensupplay tegangan ke seluruh rangkaian
yang ada. Rangkaian Catu daya (Power Supply Adaptor) ini terdiri dari satu
keluaran, yaitu 5 volt. Keluaran 5 volt digunakan untuk mensupplay tegangan
ke rangkaian mikrokontroller AVR Atmega8535, rangkaian,sensor accelerometer.
Rangkaian catu daya ditunjukkan pada gambar 3.2 berikut ini :
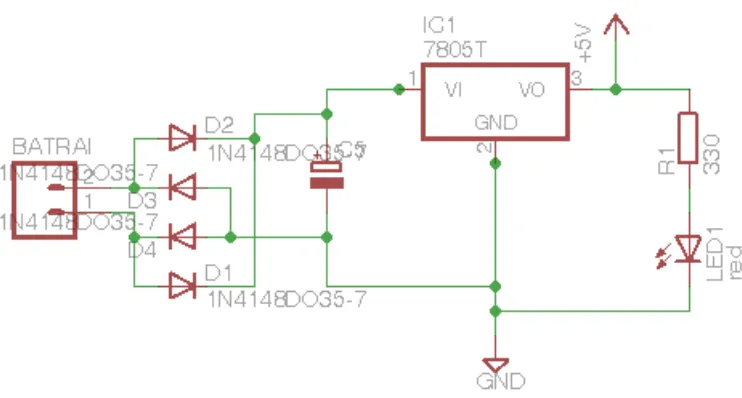
Gambar 3.2 Rangkaian Catu Daya
Baterai merupakan sumber tegangan DC. Kemudian tegangan akan
disearahkan dengan menggunakan jembatan dioda, selanjutnya akan diratakan
oleh kapasitor 220 µ F. Regulator tegangan 5 volt (7805) digunakan agar
keluaran yang dihasilkan tetap 5 volt walaupun terjadi perubahan pada tegangan
masukannya. LED hanya sebagai indikator apabila Catu daya dinyalakan.
Tegangan 5 volt DC langsung diambil dari keluaran jembatan dioda penyearah
3.4. Perancangan Rangkaian dengan Mikrokontroller AVR Atmega8535
Gambar 3.3 Rangkaian dengan Mikrokontrolller AVR ATmega8535
Mikrokontroller ini memiliki 32 port I/O, yaitu port A, port B, port C dan
port D. Pin 33 sampai 40 adalah Port A yang merupakan port ADC, dimana port
ini dapat menerima data analog. Pin 1 sampai 8 adalah port B. Pin 22 sampai 29
adalah port C. Dan Pin 14 sampai 21 adalah port D. Pin 10 dihubungkan ke sumber
tegangan 5 volt. Dan pin 11 dihubungkan ke ground. Rangkaian
Nilai kristal ini akan mempengaruhi kecepatan mikrokontroller dalam
mengeksekusi suatu perintah tertentu.
Pin 12 dan 13 dihubungkan ke XTAL 8 MHz dan dua buah kapasitor 22pF.
XTAL ini akan mempengaruhi kecepatan mikrokontroller AVR Atmega8535
dalam mengaksekusi setiap perintah dalam program. Pada pin 9 dihubungkan
dengan sebuah kapasitor dan sebuah resistor yang dihubungkan ke ground.
Kedua komponen ini berfungsi agar program pada mikrokontroller dijalankan
beberapa saat setelah power aktif. Lamanya waktu antara aktifnya power pada IC
mikrokontroller dan aktifnya program adalah sebesar perkalian antara kapasitor dan
resistor tersebut.
3.2. Perancangan sistem modul accelerometer
Sensor kemiringan bidang bekisting dan kemiringan lantai digunakan accelero sensor buatan Freescale
Semiconductor. Sensor ini memiliki 3 keluaran berupa tegangan analog Xout, Yout, dan Zout yang
merepresentasikan sumbu x, sumbu y, dan sumbu z. Ketiga keluaran ini dihubung ke kaki ADC0, ADC1,
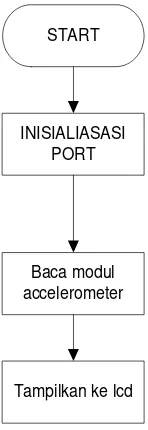
3.8.Flowchart sistem
Flowchart pada sistem rangkaian alat adalah sebagai berikut:
Gambar 3.4 flowchart keseluruhan sistem
Pertama-tama, mikrokontrolller akan melaukan inisialisasi port terhadap
pin-pin dan settingan yang dibutuhkan.kemudian mikrokontroller akan memulai
membaca / menerima data yang dikirimkan oleh modul accelerometer yang terus
menerus mengirim data. Data yang diterima oleh mikrokontroller akan diolah sesuai
dengan program yang telah di tanamkan pada mikrokontroller, setelah itu hasilnya
akan ditampilkan pada lcd.
START
INISIALIASASI PORT
Baca modul accelerometer
BAB IV
ANALISA RANGKAIAN
4.1. Pengujian Rangkaian Power Supply
Pengujian rangkaian power supply ini bertujuan untuk mengetahui tegangan
yang dikeluarkan oleh rangkaian tersebut, dengan mengukur tegangan keluaran dari
power supply menggunakan multimeter digital. Setelah dilakukan pengukuran maka
diperoleh besarnya tegangan keluaran sebesar 5 volt.Dengan begitu dapat dipastikan
apakah terjadi kesalahan terhadap rangkaian atau tidak. Jika diukur, hasil dari
keluaran tegangan tidak murni sebesar +9 Volt dan +12 Volt, tetapi +8.97Volt dan
+12.03 Volt. Hasil tersebut dikarenakan beberapafaktor, diantaranya kualitas dari
tiap-tiap komponen yang digunakannilainya tidak murni. Selain itu, tegangan jala-jala
listrik yang digunakan tidak stabil.
4.2. Pengujian Rangkaian Mikrokontroler ATMega8535
Pengujian pada rangkaian mikrokontroler ATMega8535 ini dapat dilakukan
dengan menghubungkan rangkaian ini dengan rangkaian power supply sebagai
sumber tegangan. Kaki 10 dihubungkan dengan sumber tegangan 5 volt, sedangkan
kaki 11 dihubungkan dengan ground. Kemudian tegangan pada kaki 10 diukur dengan
menggunakan Voltmeter. Dari hasil pengujian didapatkan tegangan pada kaki 10
sebesar 4,9 volt. Langkah selanjutnya adalah memberikan program sederhana pada
#include <mega8535.h>
#include <delay.h>
#include <stdio.h>
while (1)
{
// Place your code here
PORTA=0xFF;
DDRA=0xFF;
{
delay_us(100);
PORTA=0x00;
DDRA=0x00;
4.3. Pengujian Accelero Sensor
4.4. Interfacing LCD 2x16
Bagian ini hanya terdiri dari sebuah LCD dot matriks 2 x 16 karakter yang
berfungsi sebagai tampilan hasil pengukuran dan tampilan dari beberapa keterangan.
LCD dihubungkan langsung ke Port D dari mikrokontroler yang berfungsi
mengirimkan data hasil pengolahan untuk ditampilkan dalam bentuk alfabet dan
numerik pada LCD.Display karakter pada LCD diatur oleh pin EN, RS dan RW: Jalur
sedang mengirimkan sebuah data. Untuk mengirimkan data ke LCD, maka melalui
program EN harus dibuat logika low “0” dan set ( high ) pada dua jalur kontrol yang
lain RS dan RW. Jalur RW adalah jalur kontrol Read/ Write. Ketika RW berlogika
low (0), maka informasi pada bus data akan dituliskan pada layar LCD. Ketika RW
berlogika high ”1”, maka program akan melakukan pembacaan memori dari LCD.
Sedangkan pada aplikasi umum pin RW selalu diberi logika low ( 0 )
Berdasarkan keterangan di atas maka kita sudah dapat membuat progam untuk
menampilkan karaker pada display LCD. Adapun program yang diisikan ke
mikrokontroller untuk menampilkan karakter pada display LCD adalah sebagai
berikut:
#include <mega8535.h>
#include <stdio.h>
#include <delay.h>
// Alphanumeric LCD Module functions
#include <alcd.h>
// Declare your global variables here
void main(void)
{
// Declare your local variables here
PORTA=0xff;
PORTB = 0X03;
DDRB = 0X8F; //
PORTD.7 = 1;
DDRD.7 = 0;
// LCD module initialization
lcd_init(16);
lcd_gotoxy(0,0);
lcd_putsf("fisika");
Program di atas akan menampilkan kata “fisika ” di baris pertama pada display LCD
BAB V
KESIMPULAN DAN SARAN
5.1 Kesimpulan
Berdasarkan hasil pengujian dan kalibrasi alat ukur Waterpass yang telah dibuat
maka dapat dilaporkan hasilnya sebagai berikut :
1. Sensor accelerometer bekerja dengan persentasi kesalahan umum sebesar
0,127 % dibandingkan terhadap nilai hasil perhitungan teoritisnya.
2. Secara keselurukan sensor accelerometer baik dalam mengukur elevasi / peil
suatu bidang
3. Persentasi ralat daya hasil kalibrasi untuk beban resistif terhadap nilai
teoritisnya diperoleh sebesar 0,213 %.
4. Tampilan LCD membuat alat lebih terlihat menarik dan terbaca cukup jelas.
5.2Saran
Beberapa tambahan yang di perhatikan dalam meningkatkan kemampuan alat ini
adalah :
1. Supaya alat lebih dikembangkan agar hasil lebih baik dan sempurna
2. Sebaiknya alat dibentuk seportabel mungkin untuk penggunaan yang lebih