PERANCANGAN SISTEM PERBAIKAN FAKTOR DAYA (cos
φφφφ)
OTOMATISDENGAN MENGGUNAKAN MIKROKONTROLER
ATMega8535
SKRIPSI
MANONGGOR SITUMORANG
070801026
DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
UNIVERSITAS SUMATERA UTARA
PERANCANGAN SISTEM PERBAIKAN FAKTOR DAYA (cos φ) OTOMATIS DENGAN MENGGUNAKAN MIKROKONTROLER ATMega8535
SKRIPSI
Diajukan untuk melengkapi tugas dan memenuhi syarat mencapai gelar sarjana sains
MANONGGOR SITUMORANG
070801026
DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATERA UTARA
PERSETUJUAN
Judul : PERANCANGAN SISTEM PERBAIKAN FAKTOR
DAYA (cos φφφφ) OTOMATIS DENGAN MENGGUNAKAN MIKROKONTROLER ATMega8535
Kategori : SKRIPSI
Nama : MANONGGOR SITUMORANG
NIM : 070801026
Program Studi : SARJANA (S1) FISIKA Departemen : FISIKA
Fakultas : MATEMATIKA DAN ILMU PENGETAHUAN ALAM
(MIPA) UNIVERSITAS SUMATERA UTARA
Diluluskankan di : Medan, 7 Mei 2013
Diketahui/ Disetujui oleh
Ketua Departemen Fisika FMIPA USU Pembimbing
PERNYATAAN
PERANCANGAN SISTEM PERBAIKAN FAKTOR DAYA (cos φφφφ) OTOMATIS DENGAN MENGGUNAKAN MIKROKONTROLER ATMega8535
SKRIPSI
Saya mengakui bahwa skripsi ini adalah hasil kerja saya sendiri, kecuali beberapa kutipan dari ringkasan yang masing-masing disebutkan sumbernya.
Medan, 7 Mei 2013
PENGHARGAAN
Segala Puji dan Syukur penulis panjatkan kepada Tuhan, karena dengan limpah
karunia-Nya skripsi ini berhasil diselesaiakan dalam waktu yang telah ditetapkan.
Ucapan terimakasih kepada bapak Dr. BismanPerangin-angin, M.Eng,Sc
selaku dosen pembimbing yang telah memberikan panduan dan penuh percaya kepada
saya untuk menyempurnakan hingga pada penyelesaian tugas akhir ini. Panduan
ringkas, padat dan professional telah diberikan agar penulis dapat menyelesaikan
tugas ini dengan baik. Ucapan terimakasih juga ditujukan kepada Ketua Departemen
Fisika FMIPA USU, Dr. Marhaposan Situmorang, Dekan dan Pembantu Dekan
Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Sumatera Utara, semua
staf dosen di Departemen Fisika FMIPA USU, juga pegawai di FMIPA USU. Kepada
semua rekan-rekan kuliah Fisika angkatan 2007 “PHYSICS I DO”, senior dan
adik-adik yang telah memberikan bantuan, semangat serta dorongan. Kepada teman-teman
alumni SMA Bintang Timur Balige yang memberikan dukungan dan dorongan.
Kepada rekan-rekan asisten Lab. Elektronika Dasar FMIPA USU, Bang Fahry, Lyri,
Vina, Emy, dan Rony. Kepada ito br. Tambunan yang telah memberikan waktu dan
dukungan serta doa hingga selesainya tugas akhir ini. Juga tentunya kepada Ayah dan
Bunda yang telah bersusah payah, serta tak bosan-bosannya memberikan perhatian
dan cintanya, juga kepada kakak N.Mutiara, Ito Rose, Ito Hara, Dekrino dan semua
sanak keluarga yang selama ini memberikan bantuan dan dorongan yang diperlukan.
Puji Tuhan, semua yang baik akan dibalas oleh-Nya.
Akhir kata, semoga tulisan ini bermanfaat bagi pembaca dan penulis sangat
mengharapkan saran yang membangun dalam penyempurnaan tulisan ini.
Medan, 7 Mei 2013
ABSTRAK
DESIGNING POWER FACTOR (cos φφφφ) IMPROVEMENT SYSTEM USING MICROCONTROLLER ATMega8535
ABSTRACT
DAFTAR ISI
Bab II Tinjauan Pustaka 2.1 Daya ………..………. 4
2.4.1Struktur dan Defenisi Kapasitor ... 12
2.4.2Rangkaian Kapasitor ... 14
2.4.3Prinsip Perbaikan Kapasitor ... 14
2.5 Mikrokontroler ATMega8535 ... 16
2.5.1Arsistektur ATMega8535 ... 17
2.5.2Konfigurasi Pin ... 20
2.5.3Peta Memori ... 21
2.5.4Stack Pointer ... 23
2.5.5Komunikasi Serial dengan Uart ... 23
2.5.6Timer ATMega8535 ... 23
2.5.7Interupsi ... 23
2.5.8Fitur ... 24
2.5.8.1Analog to Digital Converter (ADC) ... 24
Bab III Perancangan Sistem
3.1Perancangan Perangkat Keras (Hardware) ………..……….. 26
3.1.1Konfigurasi Sistem ……….……….. 26
3.1.2Rangkaian Power Supply ... 28
3.1.3Sensor Arus ACS712 ………..……….. 29
3.1.4Sensor Tegangan ………..………. 30
3.1.5Rangkaian Relay Pengendali Kapasitor ………. 31
3.1.6Rangkaian Kapasitor Bank ………..………. 33
3.1.7Rangkaian Mikrokontroler ATMega8535 ……..…………... 36
3.1.8Rangkaian LCD (Liquid Crystal Display) ……..………….. 38
3.2Perancangan Perangkat Lunak (software) ………..………… 39
3.2.1Perancangan Program ... 39
3.2.2Metode Perhitungan cos φ ……….……..…………. 43
3.2.3Flowchart (Diagram Alir) Program …….………..………… 44
Bab IV Pengujian Sistem 4.1Data Hasil Pengujian ... 47
4.1.1Hasil Pengujian Daya Untuk Beban Tanpa Sambungan Kapasitor ... 47
4.1.2Hasil Pengujian Daya Dengan beban Tetap 108 W dan Kapasitor Manual ... 48
4.1.3Hasil Pengujian Daya Untuk Kapasitor Diatur Secara Otomatis ... 48
4.2Analisa Data Hasil Pengujian ... 49
4.2.1Untuk Beban Tanpa Sambungan Kapasitor ... 50
4.2.2Untuk Data Hasil Pengujian Beban Tetap dan Kapasitor Mode Manual ... 51
4.2.3Untuk Beban Diatur dan Kapasitor Diaktifkan Dengan Mode Otomatis Untuk Mendapatkan nilai cos φ Maksimum . 55 Bab V Kesimpulan dan Saran 5.1Kesimpulan ... 56
5.2Saran ... 58
Daftar Pustaka ... 60
DAFTAR TABEL
Halaman
Tabel 2.1 Deskripsi pin ATMega8535 …..…………..……….. 20
Tabel 2.2 Vektor interupsi ATMega5835 ………..……… 23
Tabel 3.1 Deskripsi pin terminal sensor arus ACS712 ………... 30
Tabel 3.2 Daftar masing-masing nilai kapasitor bank ……… 33
Tabel 3.3 Fungsi tombol inputan ……… 34
Tabel 3.4 Daftar relay yang aktif dan nilai kapasitansi setiap mode ……….. 35
Tabel 3.5 Peta memori LCD ………..……… 38
Tabel 4.1 Hasil pengujian daya untuk beban tanpa sambungan kapasitor …. 47 Tabel 4.2 Hasil pengujian untuk beban tetap dengan kapasitansi diatur …... 48
Tabel 4.3 Hasil perbandingan perhitungan dengan pengujian dengan beban tetap dan kapasitansi diatur ………... 48
Tabel 4.4 Hasil pengujian dengan kapasitansi diatur secara otomatis ……... 49
DAFTAR GAMBAR
Halaman
Gambar 2.1 Diagram daya ……….. 5
Gambar 2.2 Sinyal arus dan tegangan untuk beban bersifat resistif murni …… 9
Gambar 2.3 Sinyal arus dan tegangan untuk beban bersifat induktif …………. 10
Gambar 2.4 Sifat beban induktif (arus tertinggal dari tegangan/ lagging) ……. 10
Gambar 2.5 Sinyal arus dan tegangan untuk beban kapasitif ………. 11
Gambar 2.6 Sifat beban kapasitif (arus menahului tegangan /leading) ……….. 11
Gambar 2.7 Prinsip dasar kapasitor ……… 13
Gambar 2.8 Rangkaian kapasitor secara seri ………. 14
Gambar 2.9 Rangkaian kapasitor secara parallel ……… 14
Gambar 2.10 Prinsip perbaikan faktor daya ………. 16
Gambar 2.11 Arsitektur ATMega8535 ………. 19
Gambar 2.12 Konfigurasi pin ATMega8535 ……… 21
Gambar 2.13 Peta memori program ………. 22
Gambar 2.14 Peta memori data ……… 22
Gambar 2.15 Koneksi dengan filter LC pada suplai ADC ……….. 25
Gambar 2.16 Register ADMUX ………... 25
Gambar 3.1 Diagram blok system ………. 26
Gambar 3.2 Bentuk fisik MCB 1 phase ………. 27
Gambar 3.3 Rangkaian power supply ………. 28
Gambar 3.4 Rangkaian sensor arus ACS712 ………. 29
Gambar 3.5 Diagram pin-out ACS712 ………... 29
Gambar 3.6 Diagram blok sensor arus ACS712 ……… 30
Gambar 3.7 Rangkaian sensor tegangan ……… 31
Gambar 3.8 Rangkaian relay pengendali kapasitor ……… 31
Gambar 3.9 Tombol inputan ke mikrokontroler ATMega8535 ……….. 34
Gambar 3.10 Rangkaian kapasitor bank ………. 35
Gambar 3.11 Rangkaian system minimum mikrokontroler ATMega8535 ……. 37
Gambar 3.12 Rangkaian skematik dari LCD ke mikrokontroler ………. 38
Gambar 3.13 Pemilihan tipe file ……… 39
Gambar 3.14 Dialog konfirmasi dengan penggunaan CodeWizardAVR ……… 40
Gambar 3.15 Pemilihan tipe mikrokontroler dan kristal ………. 40
Gambar 3.16 Seting PORTA dan PORTB ……… 41
Gambar 3.17 Seting penempatan LCD pada PORTC ……….. 42
Gambar 3.18 Generate, save dan exit ………... 43
Gambar 3.19 Metode perhitungan sinyal tegangan terhadap waktu ……… 44
DAFTAR LAMPIRAN
Lampiran A Gambar Rangkaian Keseluruhan
ABSTRAK
DESIGNING POWER FACTOR (cos φφφφ) IMPROVEMENT SYSTEM USING MICROCONTROLLER ATMega8535
ABSTRACT
BAB I
PENDAHULUAN
1.1 Latar Belakang
Dalam suatu sistem tenaga listrik, menurunnya nilai faktor daya PF (cos ϕ) adalah
sebuah masalah yang harus diminimalisir. Sebab dengan menurunnya PF, baik
konsumen dan pemasok energi listrik akan mengalami kerugian. Bagi konsumen,
kerugiannya antara lain tegangan sistem menjadi drop, pasokan daya tidak bisa
dimaksimalkan dan klimaksnya adalah pembengkakan tagihan rekening bulanan.
Sedangkan bagi pemasok, kerugian tersebut adalah naiknya rugi-rugi daya. Faktor
yang mempengaruhi turunnya PF adalah pemakaian beban induktif oleh konsumen.
Permasalahan yang ada pada konsumen PLN, terutama pada sambungan
rumah tangga adalah rendahnya kualitas daya yang disebabkan beban induktif.
Kualitas daya yang baik akan memperbaiki drop tegangan, faktor daya, rugi-rugi daya,
kapasitas daya dan efisiensi energi listrik. Perbandingan antara daya nyata (W) dan
daya tampak (VA) akan menghasilkan faktor daya PF (cos φ) yang rendah sebagai
akibat dari pemakaian beban induktif.
Permasalahan yang kedua adalah tegangan jala-jala pada sambungan rumah
tangga 2200 VA tidak stabil 220 volt, tetapi terjadi fluktuasi tegangan. Hal ini
mengakibatkan risiko rusaknya peralatan rumah tangga. Sehingga alat ini dilengkapi
juga dengan rangkaian penstabil tegangan. Apabila tegangan mengalami penurunan
atau kenaikan, alat ini secara otomatis akan menstabilkan tegangan, sehingga risiko
1.2 Rumusan Masalah
Untuk memperbaiki faktor daya PF (cos φ) pada sistem tenaga listrik dengan beban
induktif diperlukan suatu kompensator daya reaktif yaitu salah satunya adalah
kapasitor Bank. Sistem yang akan dirancang ini adalah sistem yang menghubungkan
rangkaian yang diukur PF dengan suatu kombinasi kapasitor yang masing-masing
kapasitornya terangkai paralel. Mikrokontroler ATMega8535 berperan penting dalam
melakukan model switching untuk kombinasi kapasitor dan menampilkan faktor daya
sitem secara digital. Dengan kombinasi ini diharapkan nilai PF yang telah diperbaiki
mampu mendekati nilai maksimumnya.
1.3 Batasan Masalah
1. Sebagai pengontrol sistem pengkompensasi faktor daya ini menggunakan
mikrokontroler ATMega8535.
2. Perbaikan faktor daya menggunakan kapasitor bank untuk mengkompensasi
faktor daya dengan jenis beban induktif.
3. Sistem dirancang untuk digunakan dengan daya 1 fasa.
1.4Tujuan Penelitian
1. Memanfaatkan kapasitor bank sebagai salah satu solusi dalam perbaikan faktor
daya untuk jenis beban induktif.
2. Memanfaatkan Mikrokontroler ATMega8535 untuk mengendalikan data serial
yang diterimanya.
3. Menampilkan faktor daya sistem secara digital dengancara multiplexing.
1.5Manfaat Penelitian
1. Diharapkan dapat menjadi referensi dalam merancang perbaikan faktor daya
dengan memanfaatkan kapasitor bank.
2. Sebagai salah satu solusi dalam mengurangi kerugian hilangnya daya yang
3. Sebagai salah satu solusi dalam penggunaan energi yang lebih efisien, terutama
dalam mendukung kampanye “Stop Global Warming” dan juga nilai energi yang
semakin mahal.
1.6Sistematika Penulisan
Untuk mempermudah pembahasan dan pemahaman maka penulis membuat
sistematika pembahasan sebagai berikut:
BAB I. PENDAHULUAN
Dalam bab ini dibahas tentang latar belakang, rumusan masalah, tujuan penelitian,
batasan masalah, manfaat serta sistematika penulisan.
BAB II. TINJAUAN PUSTAKA
Pada bagian ini akan dibahas teori pendukung yang digunakan untuk pembahasan dan
cara kerja dari mikrokontroler ATMega8535, Kapasitor Bank, dan komponen
pendukung lainnya.
BAB III. PERANCANGAN SISTEM
Pada bagian ini akan dibahas tentang bagaimana perancangan Sensor Arus Efek
Hall-Allegro ACS712, sensor pembagi tegangan, LCD 16 × 2, beban induktif (lampu TL).
BAB IV. PENGUJIAN SISTEM
Pada Bab ini akan dibahas hasil analisa rangkaian dan sistem kerja alat, penjelasan
mengenai rangkaian-rangkaian yang digunakan, penjelesan mengenai program yang di
isikan ke mikrokontroler ATMega8535 dan pengujian alat atau karakterisasi alat
secara keseluruhan.
BAB V. KESIMPULAN DAN SARAN
Bab ini merupakan penutup yang meliputi tentang kesimpulan dari pembahasan yang
dilakukan dari perancangan sistem akuisisi data serta saran, apakah sistem ini dapat
dibuat lebih efisien dan dikembangkan pada suatu metode lain yang mempunyai
BAB II
TINJAUAN PUSTAKA
2.1 Daya
Daya adalah sebuah kuantitas yang penting dalam rangkaian-rangkaian praktis.Daya
merupakan ukuran disipasi energi dalam sebuah alat. Karena tegangan dan arus dapat
berubah sesuai fungsi dari waktu, kita segera memperkirakan bahwa nilai sesaat dan
nilai rata-rata dapat digunakan untuk menggambarkan disipasi. Berdasarkan defenisi,
daya sesaat adalah perkalian antara tegangan dan arus sesaat.
( ) = ( ) × ( ) (2.1 )
Jadi, kita dapat menggunakan p(t) untuk mempelajari intensitas disipasi energi pada
setiap saat waktu tertentu.
Daya disipasi dalam rangkaian ac (arus bolak-balik) resistif didefinisikan
sebagai hasil dari tegangan dan arus, yaitu, W = V × I, dimana W dalam Watt, V
dalam Volt, dan I dalam Ampere. Sehingga W dapat juga dihitung dengan
menggunakan persamaan = = / . Tentunya V dan I adalah konstan, tidak
berubah dan memiliki nilai.
Konsumsi daya dalam arus ac lebih rumit karena tegangannya sinusoidal dan
arusnya berubah secara kontiniu dalam amplitudo, dan dapat keluar atau masuk fase.
Ada beberapa sirkuit ac yang sekaligus memiliki komponen resistif dan juga reaktif.
Komponen resistif mendisipasi (membuang) energi pada rangkaian ac, sama halnya
dengan rangkaian dc. Ada kalanya komponen reaktif tidak mendisipasi energi, tetapi
melepaskannya ke sumber daya dalam satu selang siklus tegangan sebanyak energi
pada suatu rangkaian ac yang mengandung komponen resistif, dan sama sekali tidak
mengandung komponen reaktif.
Karena adanya disipasi energi yang diakibatkan oleh sifat komponen tertentu
dalam sirkuit ac, maka sistem listrik arus ac dikelompokkan dalam 3 jenis daya,
khususnya untuk beban yang memiliki impedansi (Z), yaitu:
1. Daya Nyata P atau WT (True Power)
2. Daya Reaktif Q (Reactive Power)
3. Daya Tampak S atau WAatau Papp (Apparent Power)
Ketiga jenis daya yang telah dikelompokkan di atas perlu dijabarkan dengan lebih
detail lagi agar hubungan dan perbedaannya lebih terlihat. Dalam sub bab daya
kompleks berikut ini akan dijelaskan rincian serta analoginya pada gambar 2.1.
2.2 Daya Kompleks
Istilah daya aktif dan daya nyata seringkali dipertukarkan dalam penggunaannya
dengan merumuskan daya rata-rata yang didisipasikan di dalam sebuah alat. Untuk
kasus impedansi umum Z, kita memperkirakan bahwa daya aktif adalah tidak-nol
sedangkan total produk dapat lebih besar dari disipasi daya rata-rata. Situasi
ini tampaknya agak rumit.
Daya nyata, reaktif, dan daya tampak dapat diuraikan dalam notasi bilangan
kompleks.
Daya tampak kompleks didefenisikan sebagai hasil kali tegangan dengan konjugasi
kompleks arus,
= . ∗ = | |. | |∠ (2.2)
Dan ketiga pengelompokan daya ini dapat dianalogikan dengan menggambarkannya
dalam bentuk segitiga daya, maka daya tampak S direpresentasikan oleh sisi miring
sedangkan daya nyata dan daya reaktif direpresentasikan oleh sisi-sisi segitiga yang
Q (VAR)
S, WA (VA)
P, WT (Watt)
ϕ
Gambar 2.1 Diagram Daya
Maka daya nyata atau daya aktif dan daya reaktif dapat diambil saja dari bagian real
dan bagian imajiner dari S.
Daya nyata = ℜ! " = | |. | | cos (2.3)
Daya Reaktif + = ℑ! " = | |. | | sin (2.4)
2.2.1 Daya Nyata WT (True Power)
Daya yang diserap oleh suatu perangkat listrik yang memiliki komponen resistif dan
reaktif didefenisikan sebagai daya aktif atau disebut juga daya nyata P. Daya nyata
atau terkadang disebut juga daya aktif didefinisikan sebagai laju energi yang
dibangkitkan atau dikonsumsi oleh suatu peralatan listrik, satuannya adalah Joule per
detik atau sama dengan Watt.
Dalam sirkuit yang mengandung komponen reaktif, daya nyata P adalah
bagian yang lebih kecil dibandingkan daya tampak S. Daya nyata didefenisikan
sebagai hasil perkalian antara tegangan dan arus serta koefisien faktor dayanya.
= × cos (2.5)
Sedangkan dalam sirkuit yang mengandung resistif murni, daya nyata P sama dengan
daya tampak S, karena koefisien faktor daya (cos φ) adalah 1, sehingga tidak ada daya
2.2.2 Daya Reaktif Q (Reactive Power)
Selain daya aktif, dikenal juga daya reaktif Q (daya kuadratur) yaitu daya yang
terdisipasi akibat sifat reaktansi komponen dalam sirkuit, memiliki satuan VAR
(volt-amper reaktif). Daya reaktif dapat didefenisikan sebagai hasil perkalian antara
tegangan dan arus serta nilai sin φ.
+ = × - .φ (2.6)
Daya reaktif tidak memiliki dampak positif dalam kerja suatu beban listrik. Dengan
kata lain daya reaktif ini tidak berguna dalam konsumsi listrik. Daya ini adalah
kuantitas daya baru yang muncul diakibatkan oleh komponen pasif (beban yang
memiliki sifat induktif atau kapasitif) atau dapat dikatakan rugi-rugi daya yang
tentunya tidak diinginkan. Daya ini tidak dapat dihilangkan sama sekali namun dapat
diminimalisir dengan cara penyeimbangan antara sifat kapasitif dan induktif dalam
sistem tenaga listrik ac tersebut.
2.2.3 Daya Tampak WT (Apparent Power)
Gabungan antara daya aktif dan reaktif adalah daya tampak S dengan satuan VA atau
(volt-amper). Daya tampak (daya total) adalah daya yang masuk ke rangkaian ac atau
dengan kata lain daya yang sebenarnya diterima dari pemasok sumber tegangan arus
ac, adalah merupakan resultan daya antara daya aktif dan daya reaktif.
Daya tampak WA didefenisikan serbagai hasil perkalian dari tegangan dan arus
dalam rangkaian ac tanpa memperhatikan selisih sudut fase arus dan tegangan.
= × (2.7)
Sama halnya seperti defenisi dari daya disipasi dalam rangkain dc. Oleh karena itu
daya tampak sering dinyatakan dengan satuan volt-ampere (VA). Peralatan listrik
rumah tangga ditetapkan satuannya sebagai volt-ampere dengan catatan bahwa daya
ini bukanlah daya yang diserap, namun satuan yang disebut dengan daya daya aktif P.
Kapasitor dan induktor tidak mendisipasikan daya apapun dalam arti rata-rata, atau
2.3 Faktor Daya cos φφφφ(Power Factor)
Faktor daya PF yang merupakan rasio daya nyata terhadap daya tampak merupakan
faktor indikator penting tentang bagaimana efektifnya sebuah beban melaksanakan
fungsinya sehubungan dengan disipasi daya, yang didefenisikan sebagai:
/ = 01 (2.8)
Maka faktor daya PF adalah perbandingan antara daya nyata P (Watt) dengan daya
tampak S (VA). Dalam diagram daya, PF adalah cosinus sudut antara daya aktif dan
daya tampak (Gambar 2.1).
Perlu dicatat bahwa notasi daya nyata P juga terkadang disimbolkan sebagai
WT dan daya tampak S juga disimbolkan dengan WA atau juga Papp tergantung
keinginan atau kebiasaan masing-masing menggunakan notasi yang dirasa lebih
lumrah di mata umum. Jadi tidak ada salahnya jika faktor daya dapat juga ditulis
sebagai:
/ = 23
24 (2.9)
Untuk kasus tegangan-tegangan dan arus-arus sinusoidal, dari defenisi dan persamaan
(2.6) dan (2.7) maka dapat ditulis menjadi:
/ =01 = 1 567 81 (2.10)
sehingga dapat ditulis menjadi:
/ = cos (2.11)
Dan
= × / = × × / (2.12)
Dari sana terlihat bahwa PF adalah cos φ, dimana φ adalah sudut fase antara sinyal
φ adalah sudut yang dibentuk antara sisi daya aktif P dan daya tampak S, sedangkan
daya reaktif Q tegak lurus terhadap daya aktif P.
Maka oleh sebab itu nilai PF adalah antara 0 dan 1, apabila sirkuit tetap.
Sekarang defenisi daya nyata telah dibuktikan dengan jelas dan telah ditulis secara
matematis dalam persamaan (2.5).
Jika melihat persamaan (2.12) jelas bahwa ketika φ = 0, maka cos φ = 1
sehingga = = × . Keadaan ini terdapat dalam sirkuit resistif murni ketika
sinyal tegangan dan arus satu fase. Sehingga kita dapat menghitung bahwa di dalam
suatu sirkuit resistif murni, daya nyata dan daya tampak adalah sama. Sedangkan
dalam sirkuit reaktif, nilai daya aktif selalu lebih kecil dari pada daya tampak, karena
besar sudut fase munculnya arus dan tegangan berlarut antara lebih besar dari 0°
sampai 90° (0° < φ≤ 90°). Untuk nilai sudut demikian, cos φ(faktor daya) lebih kecil
dari 1. Efisiensi daya yang lebih adalah ketika P sama atau mendekati S, yaitu ketika
cos φ = 1 atau mendekati 1.
Daya reaktif yang tinggi akan meningkatkan sudut ini dan sebagai hasilnya PF
akan menjadi lebih rendah (PF < 1), karena memang pada prinsipya PF pasti selalu
lebih kecil atau sama dengan satu.
Secara teoritis, jika seluruh beban daya yang dipasok oleh perusahaan listrik
memiliki PF = 1, maka daya maksimum yang ditransfer setara dengan kapasitas
sistem pendistribusian. Sehingga, dengan beban yang terinduksi dan jika faktor daya
berkisar dari 0,2 hingga 0,5 maka kapasitas jaringan distribusi listrik menjadi tertekan.
Jadi, daya reaktif Q (VAR) harus serendah mungkin untuk keluaran kW yang sama
dalam rangka meminimalisir kebutuhan daya tampak S (VA).
Bisa juga dikatakan bahwa PF menggambarkan cosinus sudut fase antara arus
dan tegangan atau cosinus sudut antara daya nyata P dan daya tampak S (Gambar 2.1).
Faktor daya yang rendah merugikan karena mengakibatkan arus beban tinggi, oleh
karena itu dalam perbaikan PF diperlukan keseimbangan antara sifat kapasitif dan
2.3.1 Beban Resistif Murni
Dalam sebuah sumber arus bolak-balik, bila beban yang diaplikasikan bersifat resistif
murni, maka gelombang tegangan dan arus adalah sefasa seperti tampak pada gambar
2.2 berikut.
Gambar 2.2 Sinyal arus dan tegangan untuk beban bersifat resistif
Apabila beban yang dimiliki suatu peralatan listrik tidak seimbang antara sifat
kapasitif dan induktifnya, maka titik persilangan nol (zero cross) antara arus dan
tegangan seperti yang terlihat sebelumnya pada gambar. Contoh beban induktif murni
yaitu: lampu pijar dan pemanas.
Namun apabila sifat kapasitif dan induktif tidak seimbang, sinyalnya tidak
2.3.2 Beban Induktif
Gambar 2.3 Sinyal arus dan tegangan untuk beban bersifat induktif
Apabila sifat bebannya adalah induktif, maka persilangan nol (zero cross) gelombang
arus muncul beberapa saat setelah persilangan nol sinyal tegangan muncul, atau
dengan kata lain sinyal arus tertinggal dari sinyal tegangan sebesar φ, dan keadaan ini
disebut lagging. Apabila digambarkan dalam diagram vektor:
-ф
V (Volt)
I (A
m
pe
re)
-ф
P (W)
S (V
A)
Q (VAR)
Gambar 2.4 Sifat beban induktif (arus tertiggal dari tegangan/ lagging)
Contoh beban yang bersifat induktif yaitu: motor induksi, transformator, lampu neon
2.3.3 Beban Kapasitif
Gambar 2.5 Sinyal arus dan tegangan untuk beban kapasitif
Sedangkan untuk beban bersifat kapasitif, maka sebaliknya persilangan nol (zero
cross) sinyal arus muncul beberapa saat sebelum sinyal tegangan muncul, atau dengan
kata lain sinyal arus mendahului tegangan sebesar φ, keadaan ini disebut dengan
leading. Apabila digambar dalam diagram vektor:
ф
V (Volt)
I (Am pere
)
ф
P (W)
S (VA )
Q (VAR)
Gambar 2.6 Sifat beban kapasitif (arus mendahului tegangan/ leading)
Kita dapat mendefenisikan φ adalah besarnya sudut sinyal arus yang mendahului
tegangan dalam suatu sirkuit kapasitif atau besarnya sudut sinyal arus yang tertinggal
di dalam sirkuit induktif, dan cos φ adalah faktor daya, dengan menggunakan
persamaan:
/ = cosφ =9: =;;< (2.13)
Dalam persamaan ini R adalah tahanan total rangkaian dalam ohm, Z adalah
impedansi rangkaian dalam ohm, 9 adalah tegangan yang melewati R, dan V adalah
tegangan yang terpakai di dalam rangkaian.
Ada beberapa persamaan selain (2.9) untuk menghitung daya nyata, yaitu:
= = (;<)=
9 (2.14)
Dalam persamaan ini, I adalah arus rangkaian dalam ampere, R adalah tahanan total
rangkaian dalam ohm, 9 adalah tegangan yang melalui R, dan W satuannya adalah
dalam Watt.
Beban-beban induktif dan kapasitif memiliki faktor daya yang lebih kecil dari satu,
sedangkan beban resistif memiliki faktor daya satu.
0 ≤ / < 1 untuk beban-beban reaktif
2.4 Kapasitor Bank
2.4.1 Struktur dan Defenisi Kapasitor
Struktur sebuah kapasitor terbuat dari 2 buah plat metal yang dipisahkan oleh suatu
bahan dielektrik. Bahan-bahan dielektrik yang umum dikenal misalnya udara vakum,
keramik, gelas dan lain-lain. Jika kedua ujung plat metal diberi tegangan listrik, maka
muatan-muatan positif akan mengumpul pada salah satu kaki (elektroda) metalnya
dan pada saat yang sama muatan-muatan negatif terkumpul pada ujung metal yang
satu lagi. Muatan positif tidak dapat mengalir menuju ujung kutub negatif dan
sebaliknya muatan negatif tidak bisa menuju ke ujung kutub positif, karena terpisah
oleh bahan dielektrik yang non-konduktif. Muatan elektrik ini tersimpan selama tidak
ada konduksi pada ujung-ujung kakinya. Di alam bebas, fenomena kapasitor ini terjadi
pada saat terkumpulnya muatan-muatan positif dan negatif di awan.
Kapasitor merupakan komponen yang dapat menyimpan muatan
listrik.Kapasitansi didefenisikan sebagai kemampuan dari suatu kapasitor untuk dapat
menampung muatan elektron. Sebuah kapasitor akan memiliki kapasitansi sebesar 1
farad jika dengan tegangan 1 volt dapat memuat muatan elektron sebanyak 1 coulomb
atau setara dengan 6,25 x 1018 elektron. Struktur sebuah kapasitor yang terbuat dari 2
buah pelat metal yang dipisahkan oleh suatu bahan dielektrik ditunjukkan pada
Gambar 2.7. Bahan-bahan dielektrik yang umum dikenal misalnya keramik, gelas dan
lain-lain. Jika kedua ujung pelat metal diberi tegangan listrik, maka muatan-muatan
positif akan mengumpul pada salah satu kaki elektroda metalnya dan pada saat yang
sama muatan-muatan negatif terkumpul pada ujung metal yang lain. Muatan positif
tidak dapat mengalir menuju ujung kutub negatif dan sebaliknya muatan negatif tidak
bisa menuju ke ujung kutub positif, karena terpisah oleh bahan dielektrik yang
non-konduktif. Muatan elektrik ini tersimpan selama tidak ada kondukif pada ujung-ujung
kakinya.
Kapasitor bank adalah peralatan listrik yang mempunyai sifat kapasitif yang
akan berfungsi sebagai penyeimbang sifat induktif. Kapasitas kapasitor diproduksi
dalam berbagai kapasitas mulai dari ukuran 5 kVAR sampai 60 kVAR dengan interval
tegangan kerja 230 V sampai 525 Volt tergantung nilai kapasitansi yang diperlukan.
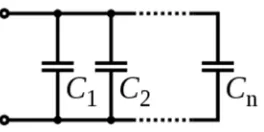
Kapasitor Bank terdiri dari beberapa kapasitor yang disambung secara paralel untuk
mendapatkan kapasitas kapasitif tertentu. Besaran kapasitas kapasitor bank yang
sering dipakai adalah kVAR (Kilovolt ampere reaktif) meskipun didalamnya
tercantum besaran kapasitansi yaitu Farad. Kapasitor ini mempunyai sifat listrik yang
kapasitif (leading). Sehingga mempunyai sifat mengurangi terhadap sifat induktif
(lagging). Sehingga dapat dikatakan dalam perbaikan faktor daya untuk arus ac
dengan beban bersifat induktif, digunakan kapasitor daya atau kapasitor bank untuk
arus ac.
2.4.2 Rangkaian Kapasitor
Untuk mendapatkan nilai kapasitor yang dibutuhkan, kapasitor tetap dapat disusun
secara seri atau paralel.
Kapasitor yang terhubung secara seri akan mengakibatkan nilai kapasitansi
total semakin kecil. Di bawah ini contoh kapasitor yang dirangkai secara seri.
Gambar 2.8 Rangkaian kapasitor secara seri.
Pada rangkaian kapasitor yang dirangkai secara seri berlaku rumus :
Sedangkan kapasitor yang terhubung secara paralel akan mengakibatkan nilai
kapasitansi pengganti semakin besar. Di bawah ini contoh kapasitor yang dirangkai
secara paralel.
Gambar 2.9 Rangkaian kapasitor secara paralel.
Pada rangkaian kapasitor yang dirangkai secara seri berlaku rumus:
IJKJLM = IBG I G IO (2.17)
2.4.3 Prinsip Perbaikan Faktor Daya (cos φφφφ)
Perhitungan nilai kapasitor digunakan untuk setiap beban yang terpasang pada sistem,
sehingga dapat memperbaiki faktor daya PF dengan maksimal. Dalam menentukan
kapasitansi kapasitor bank dilakukan terlebih dahulu perhitungan daya reaktif
kompensator (Qc). Daya reaktif kompensator dibagi dengan banyaknya step VAR
kompensator. Daya reaktif kompensator tiap step VAR kompensator digunakan untuk
perhitungan kapasitansi kapasitor bank tiap step VAR kompensator. Dengan demikian
akan didapatkan kapasitansi kapasitor untuk tiap step VAR kompensator yang
digunakan.
Pada prinsipnya, dalam perbaikan PF agar nilai PF ≈ 1, sebuah kapasitor daya
ac (kapasitor bank) harus mempunyai nilai daya reaktif kompensator Qc yang sama
dengan nilai daya reaktif Q dari sistem yang akan diperbaiki faktor dayanya, atau
dapat ditulis dengan:
Qc = Q (2.18)
Dari persamaan
Jadi daya reaktif kompensator dalam beban yang bersifat reaktansi,
+T =;
=
UT (2.21)
Untuk menghitung daya reaktif kompensator yang dibutuhkan terhadap perubahan
daya reaktif yang diinginkan, digunakan persamaan:
+T = +BV + (2.22)
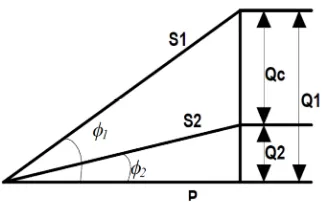
Jika keadaan ini dipenuhi, kapasitor bank akan memperbaiki faktor daya menjadi
bernilai maksimum (cos φ = 1). Besarnya nilai daya Qc kapasitor bank yang
diperlukan untukmengubah faktor daya dari cos
φ
1 menjadi cosφ
2 dapat ditentukandengan:
+T = (tanφBV tanφ ) (2.23)
Dimana:
Qc= daya reaktif kapasitor (VAR)
P = daya nyata (Watt)
φ1 = sudut fase sebelum perbaikan
φ2 = sudut fase seteleah perbaikan
Sedangkan untuk menghitung besarnya nilai kapasitor yang dibutuhkan agar didapat
nilai sudut φ2 yang diinginkan dapat ditentukan dengan:
Dari persamaan:
WT = XYCB (2.24)
atau sama dengan,
WT =ωBC (2.25)
Sehingga dari persamaan (2.21):
+T = B
ωC +T ωI =
Maka nilai kapasitor yang dibutuhkan sebagai daya reaktif kapasitif adalah:
I = Z[
;=ω (2.26)
Dari persamaan (2.20) maka untuk menentukan nilai kapasistansi kompensator dapat
ditulis menjadi:
I =;Z=ω (2.27)
Dimana: C = nilai kapasitansi kapasitor (Farad)
Qc = daya reaktif kapasitor (VAR)
V = Tegangan (Volt)
2.5 Mikrokontroler AVR ATMega8535
Mikrokontroler AVR (Alf and Vegard’s Risc processor) dari Atmel ini menggunakan
arsitektur RISC (Reduced Instruction Set Computer) yang artinya prosesor tersebut
memiliki set instruksi program yang lebih sedikit dibandingkan dengan MCS-51 yang
menerapkan arsitektur CISC (Complex Instruction Set Computer).
Hampir semua instruksi prosesor RISC adalah instruksi dasar (belum tentu
sederhana), sehingga instruksi-instruksi ini umumnya hanya memerlukan 1 siklus
mesin untuk menjalankannya. Kecuali instruksi percabangan yang membutuhkan 2
siklus mesin. RISC biasanya dibuat dengan arsitektur Harvard, karena arsitektur ini
yang memungkinkan untuk membuat eksekusi instruksi selesai dikerjakan dalam satu
atau dua siklus mesin, sehingga akan semakin cepat dan handal. Proses downloading
programnya relatif lebih mudah karena dapat dilakukan langsung pada sistemnya.
Sekarang ini, AVR dapat dikelompokkan menjadi 6 kelas, yaitu keluarga ATiny,
keluarga AT90Sxx, keluarga ATMega, keluarga AT90CAN, keluarga AT90PWM dan
AT86RFxx. Pada dasarnya yang membedakan masing-masing kelas adalah memori,
peripheral, dan fungsinya, sedangkan dari segi arsitektur dan instruksi yang
digunakan, mereka hampir sama. Sebagai pengendali utama dalam pembuatan robot
ini, digunakan salah satu produk ATMEL dari keluarga ATMega yaitu ATMega8535.
2.5.1 Arsitektur ATMega8535
Mikrokontroler ATMega8535 memiliki fitur-fitur utama, seperti berikut.
Saluran I/O sebanyak 32 buah yaitu Port A, Port B, Port C, dan Port D.
1. ADC 10 bit sebanyak 8 saluran.
2. Tiga unit Timer/Counter dengan kemampuan pembandingan.
3. CPU yang terdiri atas 32 buah register.
4. Watchdog Timer dengan osilator internal.
5. SRAM sebesar 512 byte.
7. Unit interupsi internal dan eksternal.
8. Port antarmuka SPI.
9. EEPROM sebesar 512 byte yang dapat diprogram saat operasi.
10.Antarmuka komparator analog.
11.Port USART untuk komunikasi serial.
Mikrokontroler AVR ATMega8535 merupakan mikrokontroler produksi
Atmel dengan 8 KByte In-System Programmable-Flash, 512 Byte EEPROM dan 512
Bytes Internal SRAM.AVR ATMega8535 memiliki seluruh fitur yang dimiliki
AT90S8535.Selain itu, konfigurasi pin AVR ATMega8535 juga kompatibel dengan
AT90S8535.
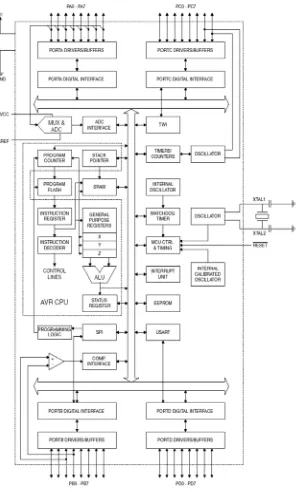
Diagram blok arsitektur ATMega8535 ditunjukkan oleh Gambar 2.11.
Terdapat sebuah inti prosesor (processor core) yaitu Central Processing Unit, di mana
terjadi proses pengumpanan instruksi (fetching) dan komputasi data. Seluruh register
umum sebanyak 32 buah terhubung langsung dengan unit ALU (Arithmatic and Logic
Unit). Tedapat empat buah port masing-masing delapan bit dapat difungsikan sebagai
masukan maupun keluaran.
Media penyimpan program berupa Flash Memory, sedangkan penyimpan data
berupa SRAM (Static Ramdom Access Memory) dan EEPROM (Electrical Erasable
Programmable Read Only Memory). Untuk komunikasi data tersedia fasilitas SPI
(Serial Peripheral Interface), USART (Universal Synchronous and Asynchronous
serial Receiver and Transmitter), serta TWI (Two-wire Serial Interface).
Di samping itu terdapat fitur tambahan, antara lain AC (Analog Comparator), 8
kanal 10-bit ADC (Analog to Digital Converter), 3 buah Timer/Counter, WDT
(Watchdog Timer), manajemen penghematan daya (Sleep Mode), serta osilator
internal 8 MHz. Seluruh fitur terhubung ke bus 8 bit. Unit interupsi menyediakan
sumber interupsi hingga 21 macam. Sebuah stack pointer selebar 16 bit dapat
Gambar 2.11 Arsitektur ATmega8535
Mikrokontroler ATMega8535 dapat dipasang pada frekuensi kerja hingga 16 MHz
(maksimal 8 MHz untuk versi ATMega8535L). Sumber frekuensi bisa dari luar
berupa osilator kristal, atau menggunakan osilator internal.
Keluarga AVR dapat mengeksekusi instruksi dengan cepat karena menggunakan
teknik “memegang sambil mengerjakan” (fetch during execution). Dalam satu siklus
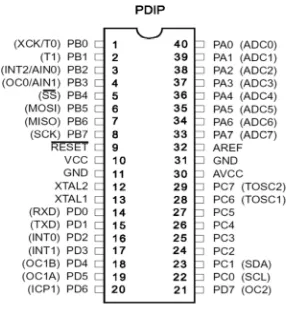
2.5.2 Konfigurasi Pin
ATMega8535 terdiri atas 40 pin dengan konfigurasi seperti pada tabel 2.1.
Tabel 2.1 Deskripsi pin ATMega8535
Nama Pin Fungsi
VCC Catu daya
GND Ground
Port A
(PA7..PA0)
Port I/O 8-bit dua arah dengan resistor pull-up internal.
Juga berfungsi sebagai masukan analog ke ADC (ADC0 s.d.
ADC7)
Port B
(PB7..PB0)
Port I/O 8-bit dua arah dengan resistor pull-up internal.
Fungsi khusus masing-masing pin :
Port Pin Fungsi lain
PB0 T0 (Timer/Counter0 External Counter Input)
PB1 T1 (Timer/Counter1 External Counter Input)
PB2 AIN0 (Analog Comparator Positive Input)
PB3 AIN1 (Analog Comparator Negative Input)
PB4 SS (SPI Slave Select Input)
PB5 MOSI (SPI Bus Master Output/Slave Input)
PB6 MISO (SPI Bus Master Input/Slave Output)
PB7 SCK (SPI Bus Serial Clock)
Port C
(PC7..PC0)
Port I/O 8-bit dua arah dengan resistor pull-up internal.
Dua pin yaitu PC6 dan PC7 berfungsi sebagai oscillator luar untuk
Timer/Counter2.
Port D
(PD7..PD0)
Port I/O 8-bit dua arah dengan resistor pull-up internal.
Fungsi khusus masing-masing pin :
Port Pin Fungsi lain
PD0 RXD (UART Input Line)
PD1 TXD (UART Output Line)
PD2 INT0 (External Interrupt 0 Input)
PD3 INT1 (External Interrupt 1 Input)
Output)
PD5 OC1A (Timer/Counter1 Output CompareA Match
Output)
PD6 ICP (Timer/Counter1 Input Capture Pin)
PD7 OC2 (Timer/Counter2 Output Compare Match Output)
RESET Masukan reset. Sebuah reset terjadi jika pin ini diberi logika
rendah melebihi periode minimum yang diperlukan.
XTAL1 Masukan ke inverting oscillator amplifier dan masukan ke
rangkaian clock internal.
XTAL2 Keluaran dari inverting oscillator amplifier.
AVCC Catu daya untuk port A dan ADC.
AREF Referensi masukan analog untuk ADC.
AGND Ground analog.
2.5.3 Peta Memori
Arsitektur AVR terdiri atas dua memori utama, yaitu Data Memori dan Program
Memori.Sebagai tambahan fitur dari ATMega8535, terdapat EEPROM 512 byte
sebagai memori data dan dapat diprogram saat operasi.
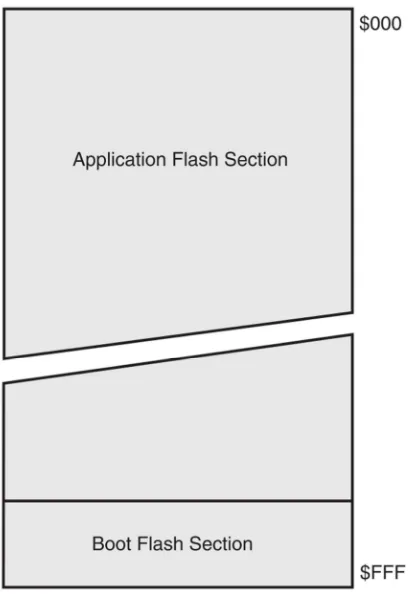
ATMega8535 terdiri atas 8K byte On-chip In-System Reprogrammable Flash
memori untuk penyimpan program. Karena seluruh instruksi AVR dalam bentuk 16
bit atau 32 bit, maka Flash dirancang dengan komposisi 4K × 16. Untuk mendukung
keamanan software atau program, Flash Program Memori dibagi menjadi dua bagian
yaitu bagian Boot Program dan bagian Application Program.Gambar 2.13
mengilustrasikan susunan Memori Program Flash ATMega8535.
Gambar 2.13 Peta memori program
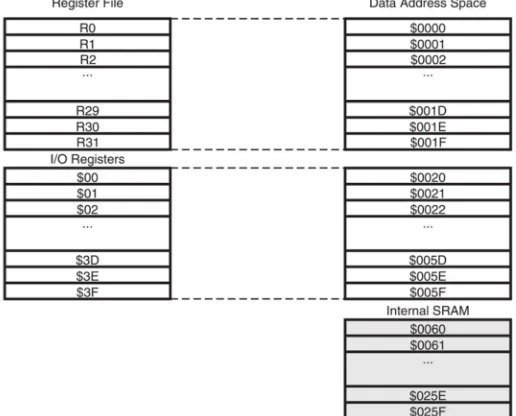
Memori data terbagi menjadi 3 bagian, yaitu 32 buah register umum, 64 buah register
I/O, dan 512 byte SRAM Internal. Konfigurasi memori data ditunjukkan oleh gambar
Gambar 2.14 Peta memori data
2.5.4 Stack Pointer
Stack pointer merupakan suatu bagian dari AVR yang berguna untuk menyimpan data
sementara, variabel lokal, dan alamat kembali dari suatu interupsi ataupun subrutin.
Stack pointer diwujudkan sebagai dua unit register, yaitu SPH dan SPL.
Saat awal, SPH dan SPL akan bernilai 0, sehingga perlu diinisialisasi terlebih dahulu.
SPH merupakan byte atas (MSB), sedangkan SPL merupakan byte bawah (LSB). Hal
ini hanya berlaku untuk AVR dengan kapasitas SRAM lebih dari 256 byte. Bila tidak,
maka SPH tidak didefinisikan dan tidak dapat digunakan.
2.5.5 Komunikasi Serial Dengan Uart
AVR ATMega8535 memiliki 4 buah register I/O yang berkaitan dengan komunikasi
UART, yaitu UART I/O Data Register (UDR), UART Baud Rate Register (UBRR),
UART Status Register (USR) dan UART Control Register (UCR).
2.5.6 Timer ATMega8535
AVR ATMega8535 memiliki tiga buah timer, yaitu Timer/Counter0 (8 bit),
2.5.7 Interupsi
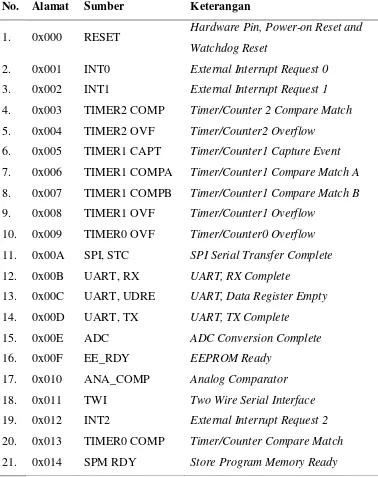
ATMega8535 memiliki 21 buah sumber interupsi. Interupsi tersebut bekerja jika bit I
pada Register status atau Status Register (SREG) dan bit pada masing-masing register
bernilai 1. Penjelasan sumber interupsi terdapat pada tabel 2.2
Tabel 2.2 Vektor interupsi ATMega 8535
No. Alamat Sumber Keterangan
1. 0x000 RESET Hardware Pin, Power-on Reset and
Watchdog Reset
2. 0x001 INT0 External Interrupt Request 0
3. 0x002 INT1 External Interrupt Request 1
4. 0x003 TIMER2 COMP Timer/Counter 2 Compare Match
5. 0x004 TIMER2 OVF Timer/Counter2 Overflow
6. 0x005 TIMER1 CAPT Timer/Counter1 Capture Event
7. 0x006 TIMER1 COMPA Timer/Counter1 Compare Match A
8. 0x007 TIMER1 COMPB Timer/Counter1 Compare Match B
9. 0x008 TIMER1 OVF Timer/Counter1 Overflow
10. 0x009 TIMER0 OVF Timer/Counter0 Overflow
11. 0x00A SPI, STC SPI Serial Transfer Complete
12. 0x00B UART, RX UART, RX Complete
13. 0x00C UART, UDRE UART, Data Register Empty
14. 0x00D UART, TX UART, TX Complete
15. 0x00E ADC ADC Conversion Complete
16. 0x00F EE_RDY EEPROM Ready
17. 0x010 ANA_COMP Analog Comparator
18. 0x011 TWI Two Wire Serial Interface
19. 0x012 INT2 External Interrupt Request 2
20. 0x013 TIMER0 COMP Timer/Counter Compare Match
2.5.8 Fitur
2.5.8.1Analog To Digital Converter (Adc)
ADC pada ATMega8535 merupakan ADC 10-bit tipe Successive Approximation,
yang terhubung ke sebuah multiplekser analog yang akan memilih satu dari delapan
kanal. Untuk menjaga validitas data, terdapat untai Sample and Hold. Tegangan suplai
ADC terpisah dari tegangan suplai mikrokontroler, tetapi selisihnya tidak boleh lebih
dari 0,3 V. Untuk mengatasinya, digunakan untai filter LC seperti ditunjukkan pada
Gambar 2.15.
Terdapat 8 kanal ADC masing-masing selebar 10 bit. ADC dapat digunakan
dengan memberikan masukan tegangan pada port ADC, yaitu port A.0 sampai dengan
port A.7.
Ada dua mode ADC yang dapat digunakan, yaitu single conversion dan free
running. Pada mode single conversion, pengguna harus mengaktifkan setiap kali ADC
akandigunakan. Sedangkan pada mode free running, pengguna cukup sekali
mengaktifkan, sehingga ADC akan terus mengkonversi tanpa henti.
Dalam kemasan TQFP (Thin Quad Flat Package) terdapat fasilitas tambahan,
yaitu kanal diferensial dan kanal diferensial dengan penguatan, yang memungkinkan
dua kanal ADC digunakan sekaligus. Kemasan PDIP tidak menyediakan fasilitas ini.
Terdapat beberapa register I/O yang terlibat dalam proses konversi ADC, antara lain:
ADMUX (ADC Multiplexer Selection Register). Register ADMUX berisi bit-bit yang
mengatur pilihan kanal (MUX4:0), bit pengatur penyajian data (ADLAR), dan bit-bit
pemilih tegangan referensi (REFS1:0). Gambar 2.16 menunjukkan isi register
ADMUX.
Gambar 2.16 Register ADMUX
2.5.8.2Pulse Width Modulation (PWM)
Mikrokontroler ATMega8535 menyediakan fitur Timer/Counter1 yang dapat diatur
sebagai timer, pencacah (counter), perekam waktu kejadian (even occurance time
capture), pembangkit isyarat PWM (Pulse Width Modulation), serta autoreload timer
(Clear Timer on Compare/CTC). Dengan lebar 16 bit, Timer/Counter1 dapat
digunakan secara fleksibel untuk berbagai tujuan yang berkaitan dengan waktu dan
BAB III
PERANCANGAN SISTEM
3.1 Perancangan Perangkat Keras (Hardware)
Perancangan perangkat keras meliputi perancangan sistem secara umum berupa blok
diagram serta rangkaian dari masing-masing bagian.
3.1.1 Konfigurasi Sistem
Pemodelan alat dibuat dengan menggunakan diagram blok. Adapun diagram blok dari
sistem yang dirancang adalah seperti yang diperlihatkan pada gambar 3.1 berikut ini:
MCB
TOMBOL SETINGSebagai sumber daya, jala-jala listrik bersumber dari PLN dengan tegangan 220V
50Hz.
Gambar 3.2 Bentuk fisik MCB 1 phase
MCB (Mini Circuit Breaker) digunakan untuk memutuskan atau
menghubungkan hubungan jala-jala listrik ke beban yang diuji apabila terjadi beban
berlebih maupun hubungan singkat.
Untuk mengukur tegangan digunakan sensor tegangan. Sensor tegangan yang
digunakan adalah trafo stepdown, lalu tegangannya diturunkan dengan menggunakan
rangkaian pembagi tegangan. Output dari sensor tegangan akan menjadi masukan ke
internal ADC dari mikrokontroler ATMega8535.
Sensor arus berfungsi untuk mengukur kuat arus. Output sensor arus akan
menjadi input untuk ADC internal mikrokontroler ATMega8535.
Beban uji yang digunakan adalah beban induksi berupa lampu pendar
berbentuk tabung panjang atau yang umum dikenal dengan lampu TL (tubular lamp)
atau lampu neon. Lampu ini memiliki ballas atau pemberat yang bekerja sebagai
pengatur arus listrik dan mengatur tegangan yang membuat beban ini bersifat induktif.
Ballas jenis magnetik ini bekerja dengan prinsip pembatasan arus yang bekerja dengan
cara mencekik (bahasa Inggris: choke) arus pada titik yang sudah ditentukan
berdasarkan siklus arus bolak-balik pada frekuensi jala-jala sumber, atau 50/60Hz.
Beban untuk mengosongkan kapasitor menggunakan lampu. Apabila relay
dalam keadaan tidak aktif (NC) maka kapasitor bank akan terhubung ke beban lampu
Mikrokontroler berfungsi mengolah data input, menampilkannya pada display
LCD dan melakukan tindakan sesuai dengan sistem kerja alat. Cos φ dihitung dengan
cara membandingkan antara sinyal analog arus bolak balik yang dihasilkan oleh
sensor arus dan sinyal analog yang dihasilkan oleh sensor tegangan. Jika sinyal analog
tegangan mendahului sinyal analog arus, maka beban bersifat induktif, jika sebaliknya
sinyal analog arus mendahului sinyal analog tegangan maka disebut beban bersifat
kapasitif. Selanjutnya mikrokontoler akan mengendalikan model kombinasi kapasitor
melalui relay sesuai dengan hasil perhitungan yang dilakukan pada mikrokontroler.
Tombol seting berfungsi untuk menentukan apakah sistem akan dijalankan
secara manual atau otomatis.
3.1.2 Rangkaian Power Supply
Rangkaian ini berfungsi untuk mencatu tegangan ke seluruh rangkaian yang
ada.Rangkaian PSA yang dibuat terdiri dari dua keluaran, yaitu 5 volt dan 12 volt.
Keluaran 5 volt digunakan untuk mencatu tegangan ke rangkaian mikrokontroler,
sedangkan +12 volt digunakan untuk menyalurkan tegangan ke rangkaian relay.
Rangkaian power supply ditunjukkan pada gambar 3.3 berikut ini:
Gambar 3.3 Rangkaian Power Supply
Transformator CT (center tap) merupakan trafo step-down yang berfungsi untuk
volt AC akan disearahkan dengan menggunakan dua buah dioda silikon, selanjutnya
12 volt DC akan diratakan oleh kapasitor 3300 µF. IC regulator tegangan 5 volt (7805)
digunakan agar keluaran yang dihasilkan tetap (tidak melebihi) 5 volt kalaupun terjadi
perubahan pada tegangan masukannya. LED berfungsi sebagai indikator apabila PSA
dalam keadaan hidup. Sedangkan untuk tegangan 12 volt DC langsung diambil dari
keluaran jembatan dioda.
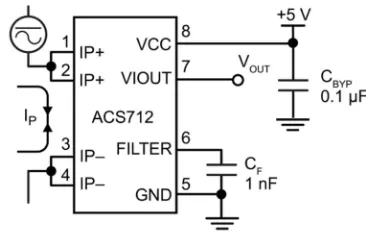
3.1.3 Rangkaian Sensor Arus ACS712
ACS712 adalah Hall Effect current sensor (sensor arus). Hall effect allegro ACS712
merupakan sensor yang presisi sebagai sensor arus AC atau DC dalam pembacaan
arus didalam dunia industri, otomotif, komersil dan sistem-sistem komunikasi. Pada
umumnya aplikasi sensor ini biasanya digunakan untuk mengontrol motor, deteksi
beban listrik, switched-mode power supplies dan proteksi beban berlebih.
Gambar 3.4 Rangkaian sensor arus ACS712
Sensor ini memiliki pembacaan dengan ketepatan yang tinggi, karena
didalamnya terdapat rangkaian low-offset linear Hall dengan satu lintasan yang
terbuat dari tembaga. Cara kerja sensor ini adalah arus yang dibaca mengalir melalui
kabel tembaga yang terdapat didalamnya yang menghasilkan medan magnet yang
ditangkap oleh integrated Hall IC dan diubah menjadi tegangan proporsional.
Ketelitian dalam pembacaan sensor dioptimalkan dengan cara pemasangan komponen
yang ada didalamnya antara penghantar yang menghasilkan medan magnet dengan
hall transducer secara berdekatan. Persisnya, tegangan proporsional yang rendah akan
menstabilkan Bi CMOS Hall IC yang didalamnya yang telah dibuat untuk ketelitian
Gambar 3.5 Diagram pin-out ACS712
Berikut deskripsi dari pin sensor arus ACS71.
Tabel 3.1 Deskripsi pin terminal sensor arus ACS712
Keluaran dari sensor ini sebesar (>VIOUT(Q)) saat peningkatan arus pada penghantar
arus (dari pin 1 dan pin 2 ke pin 3 dan 4), yang digunakan untuk pendeteksian atau
perasa arus. Hambatan dalam penghantar sensor sebesar 1,2 mΩ dengan daya yang
rendah. Jalur terminal konduktif secara kelistrikan diisolasi dari sensor leads/
mengarah (pin 5 sampai pin 8). Hal ini menjadikan sensor arus ACS712 dapat
digunakan pada aplikasi-aplikasi yang membutuhkan isolasi listrik tanpa
menggunakan opto-isolator atau teknik isolasi lainnya yang mahal. Ketebalan
penghantar arus didalam sensor sebesar 3 kali kondisi overcurrent.Sensor ini telah
dikalibrasi oleh pabrik. Untuk lebih jelas dapat dilihat pada gambar diagramblok
berikut:
3.1.4 Rangkaian Sensor Tegangan
Sensor tegangan menggunakan resistor pembagi tegangan yang dipasang secara
paralel antara fase dengan netral. Sensor tegangan ini berfungsi untuk mendeteksi
sinyal tegangan dan juga sekaligus sebagai power supply. Disamping itu, resistor juga
tidak merubah harga fase yang terjadi pada beban induktif yang terpasang. Dengan
menggunakan transformator step down sebagai sumber tegangan, rangkaian sensor
tegangan ditunjukkan pada gambar berikut ini:
Gambar 3.7 Rangkaian sensor tegangan
Resistor pembagi tegangan ini juga akan menurunkan tegangan dari tegangan
sumber menjadi tegangan yang dikehendaki. Pergeseran fasa adalah hubungan antara
tegangan yang diterapkan pada sisi tegangan tinggi dan tegangan yang dihasilkan pada
tegangan rendah dan sebaliknya. Pergeseran fasa pada tegangan tinggi terhadap
tegangan rendah biasanya sangatlah kecil. Apabila terjadi penuaan dan kerusakan
pada inti trafo maka hal ini dapat diidentifikasikan dengan terjadinya perubahan sudut
fasa yang sangat signifikan.
3.1.5 Rangkaian Relay Pengendali Kapasitor
Relay ini berfungsi sebagai saklar elektronik yang dapat menghubungkan dan
memutuskan perangkat elektrik dan dalam hal ini adalah kapasitor. Disini relay akan
menghubungkan kapasitor bank dengan lampu pengosongan kapasitor apabila dalam
keadaan tidak aktif (NO), atau akan menghubungkannya dengan sumber daya apabila
dalam keadaan aktif (NC). Rangkaian relay pengendali kapasitor tampak seperti
Gambar 3.8 Rangkaian relay pengendali kapasitor
Karena kapasitor bank yang akan dikendalikan ada 4 buah, maka rangkaian
pengendali kapasitor seperti gambar di atas juga terdiri dari 4 buah (dapat dilihat
dalam rangkaian keseluruhan). Relay 1 akan mengaktifkan kapasitor 1, relay 2 akan
mengaktifkan kapasitor 2 dan begitu juga seterusnya ununtuk relay 3 dan 4.
Relay merupakan salah satu komponen elektronika yang terdiri dari
lempengan logam sebagai saklar dan kumparan yang berfungsi untuk menghasilkan
medan magnet. Pada rangkaian ini digunakan relay 12 volt, ini berarti jika positif
relay (kaki1) dihubungkan ke sumber tegangan 12 volt dan negatif relay (kaki 2)
dihubungkan ke ground, maka kumparan akan menghasilkan medan magnet, dimana
medan magnet ini akan menarik lempengan yang mengakibatkan saklar (kaki 3)
terhubung ke kaki 4. Dengan demikian, kita dapat mengunakan kaki 3 dan kaki 4 pada
relay sebagai saklar untuk menghubungkan kapasitor ke sumber tegangan PLN.
Pada rangkaian ini untuk mengaktifkan atau menon-aktifkan relay
membutuhkan transistor tipe NPN sebagai pemicu. Dari gambar dapat dilihat bahwa
kutub negatif relay dihubungkan ke kolektor transistor NPN (2SC945), ini berarti jika
transistor dalam keadaan aktif maka kolektor akan terhubung ke emitor dimana emitor
langsung terhubung ke ground yang menyebabkan tegangan di kolektor menjadi 0
volt, keadaan ini akan mengakibatkan relay aktif. Sebaliknya jika transistor tidak aktif,
maka kolektor tidak terhubung ke emitor, sehingga tegangan pada kolektor menjadi 12
volt, keadaan ini menyebabkan relay tidak aktif.
Kumparan pada relay akan menghasilkan tegangan seketika yang besar ketika
Untuk mencegah kerusakan pada transistor tersebut sebuah dioda harus dihubungkan
ke relay tersebut. Dioda dihubungkan secara terbalik sehingga secara normal dioda ini
tidak menghantarkan. Penghantaran hanya terjadi ketika relay dinonaktifkan, pada
saat ini arus akan terus mengalir melalui kumparan dan arus ini akan dialirkan ke
dioda. Tanpa adanya dioda arus sesaat yang besar itu akan mengalir ke transistor,
yang mengakibatkan kerusakan pada transistor.
Untuk menentukan tipe transistor yang digunakan, maka harus diketahui arus
yang mengalir pada relay. Relay yang digunakan adalah JQX-4453, relay ini
membutuhkan arus 34 mA untuk dapat bekerja, maka transistor yang digunakan harus
dapat mengalirkan arus 34 mA pada kolektornya. Pada alat ini digunakan transistor
tipe NPN C945, yang dapat mengalirkan arus maksimal 100 mA pada kolektornya.
Berikutnya akan dihitung hambatan yang digunakan pada basis. (hfe min = 90)
mA
dengan demikian nilai Rb maksimum yang harus digunakan adalah:
Ω
Jadi dapat digunakan resistor ¼ Watt.
Rb minimum yang dapat digunakan adalah (ib Max = 20 mA):
3.1.6 Rangkaian Kapasitor Bank
Dalam sistem ini, ada 4 buah kapasitor ac (kapasitor bank) yang nilainya bervariasi.
Kapasitor bank yang digunakan masing-masing nilainya dapat dilihat dalam tabel
berikut.
Tabel 3.2 Daftar masing-masing nilai kapasitor
No Nilai Kapasitor (µF)
1 1,5
2 2
3 2,5
4 4
Semua kapasitor ini dirangkai secara paralel, sehingga apabila kapasitor tersambung
maka kapasitansinya akan bertambah. Untuk mengaktifkan kapasitor, dilengkapi
dengan 2 jenis tombol yang akan memberikan inputan mikrokontroler dalam
mengaktifakan kapasitor dengan cara mengaktifkan relay. Kedua mode inputan
tersebut berfungsi untuk mengaktifkan kapasitor secara otomatis atau dengan
mengaktifkan kapasitor satu per satu. Untuk memilih mode yang diinginkan,
dilengkapi 5 tombol yang disediakan untuk melakukan mode inputan ke
mikrokontroler ATMega8535 yang akan mengaktifkan relay sehingga kapasitor bank
juga akan aktif.
Berikut penjelasan mengenai fungsi masing-masing tombol tersebut.
Tabel 3.3 Fungsi tombol inputan
Tombol Kapasitor Yang Aktif
1 Otomatis
2 1
3 2
4 3
5 4
Pada mode manual, kita dapat menentukan kapasitor yang akan diaktifkan sesuai yang
kita kehendai. Terlihat dalam tabel, apabila ditekan tombol 2 maka kapasitor 1 akan
aktif, ditekan tombol 3 maka nilai kapasitansi akan bertambah dengan aktifnya
kapasitor 2. Demikian sterusnya sampai tombol 5, dan untuk menonaktifkan kapasitor
ini cukup dengan menekan tombol sekali lagi.
Pada mode otomatis, cukup dengan menekan tombol 1 maka keempat
kapasitor ini akan terhubung paralel secara otomatis ke sumber daya oleh relay dengan
8 jenis mode kombinasi. Daftar nilai kapasitansi untuk semua kombinasi kapasitor
diperlihatkan dalam tabel berikut:
Tabel 3.4 Daftar relay yang aktif dan nilai kapasitansi setiap mode
Mode Konfigurasi relay yang aktif Kapasitansi (µF)
0 - 0
Ketujuh mode kombinasi kapasitor bank pada table di atas diaharapkan sudah mampu
mode kapasitor ini dikendalikan oleh relay atas instruksi dari mikrokontroler
ATMega8535 hingga cos φ yang dikehendaki (cos φ≥ 0,98) sudah memenuhi.
Sedangkan untuk rangkaian kapasitor bank sudah ada pada gambar (3.8).
Masing-masing kapasitor bank memiliki rangkaian yang sama seperti gambar tersebut, untuk
selengkapnya dapat dilihat dalam gambar rangkaian keseluruhan.
Relay akan mengendalikan kapasitor bank, apakah kapasitor bank akan
terhubung ke lampu (untuk mengosongkan kapasitor) atau ke sumber tegangan dan
juga sekaligus beban induksi (apabila dihubungkan dengan beban). NC (normally
close) relay terhubung ke lampu pengosongan kapasitor, maka ini berarti pada saat
relay tidak aktif, kapasitor bank akan terhubung ke lampu tersebut dengan tujuan agar
kapasitor tidak bermuatan lagi. NO (normally open) relay terhubung ke sumber
tegangan ac 220V 50Hz, maka pada saat relay aktif, kapasitor bank akan terhubung ke
sumber tegangan tersebut.
3.1.7 Rangkaian Mikrokontroler ATMega8535
Pada perancangan alat ini akan digunakan mikrokontroler ATMega8535 yang
berfungsi untuk membaca tegangan analog dari sensor tegangan dan sensor arus serta
menghitung nilai cos φ, membaca inputan dari tombol, menampilkan data hasil
perhitungan ke LCD dan mengendalikan relay.
Rangkaian ini berfungsi sebagai pusat kendali dari seluruh sistem yang
ada.Komponen utama dari rangkaian ini adalah IC mikrokontroler ATMega8535.
Pada IC inilah semua program diisikan, sehingga rangkaian dapat berjalan sesuai
dengan yang dikehendaki. Dalam menjalankan chip IC mikrokontroler ATMega8535
memerlukan rangkaian tambahan beberapa komponen elektronikalain sebagai
pendukung. Komponen pendukung ini akan dirangkai dalam bentuk sederhana dan
minim sehingga disebut sebagai rangkaian sistem minimum. Dengan rangkaian sistem
minimum ini, maka rangkaian mikrokontroler baru dapat bekerja. Dalam perancangan
1. Chip IC mikrokontroler ATMega8535
2. Kristal 11.0592 MHz
3. Kapasitor
4. Resistor
Rangkaian mikrokontroler ATMega8535 master ditunjukkan pada gambar berikut ini:
Gambar 3.10 Rangkaian sistem minimum mikrokontroler ATMega8535
Mikrokontroler ini memiliki 32 port I/O, yaitu port A, port B, port C dan port D. Pin
33 sampai 40 adalah Port A yang merupakan port ADC, dimana port ini dapat
menerima data analog. Pin 1 sampai 8 adalah port B. Pin 22 sampai 29 adalah port C.
Dan Pin 14 sampai 21 adalah port D. Pin 10 dihubungkan ke sumber tegangan 5 volt.
Dan pin 11 dihubungkan ke ground. Rangkaian mikrokontroler ini menggunakan
komponen kristal sebagai sumber clocknya. Nilai kristal ini akan mempengaruhi
kecepatan mikrokontroler dalam mengeksekusi suatu perintah tertentu.
Pada pin 9 dihubungkan dengan sebuah kapasitor dan sebuah resistor yang
terhubung ke ground. Kedua komponen ini berfungsi agar program pada
mikrokontroler dijalankan beberapa saat setelah power aktif. Lamanya waktu antara
aktifnya power pada IC mikrokontroler dan aktifnya program adalah sebesar perkalian
3.1.8 Rangkaian LCD (Liquid Crystal Display)
LCD (Liquid Crystal Display) adalah modul indikator yang banyak digunakan karena
tampilannya yang menarik. LCD yang paling banyak digunakan saat ini ialah LCD
LMB162ABC karena harganya cukup murah. LCD LMB162ABC merupakan modul
LCD dengan tampilan 2 × 16 (2 baris × 16 kolom) dengan konsumsi daya rendah.
Modul tersebut dilengkapi dengan mikrokontroler yang didesain khusus untuk
mengendalikan LCD.
Mikrokontroler HD44780 buatan Hitachi yang berfungsi sebagai pengendali LCD
memiliki CGROM (Character Generator Read Only Memory), CGRAM (Character
Generator Random Access Memory), dan DDRAM (Display Data Random Access
Memory).
LCD yang umum, ada yang panjangnya hingga 40 karakter (2 × 40 dan 4 × 40),
dimana kita menggunakan DDRAM untuk mengatur tempat penyimpanan karakter
tersebut.
Tabel 3.5 Peta memori LCD
Gambar berikut menampilkan hubungan antara LCD dengan port mikrokontroler:
Pada gambar rangkaian di atas pin 1 dihubungkan ke Vcc (5V), pin 2 dan 16
dihubungkan ke GND (Ground), pin 3 merupakan pengaturan tegangan Contrast dari
LCD, pin 4 merupakan Register Select (RS), pin 5 merupakan R/W (Read/Write), pin
6 merupakan Enable, pin 11-14 merupakan data. Reset, Enable, R/W dan data
dihubungkan ke mikrokontroler Atmega8535. Fungsi dari potensiometer (R4) adalah
untuk mengatur gelap/ terangnya karakter yang ditampilkan pada layar LCD.
3.2 Perancangan Perangkat Lunak (Software)
Perancangan perangkat lunak meliputi penjelasan mengenai perancangan program
yang dipergunakan dan flowchart dari program untuk mengendalikan sistem.
3.2.1 Perancangan Program
Pada perancangan ini digunakan Code Vision AVR sebagai editor dan compiler dari
program yang dirancang. Untuk memulai pemrograman Code Vision AVR dilakukan
langkah sebagai berikut :
1. Buka software program CodeVisionAVR.
2. Pilih menu File New dan pilih Project kemudian tekan OK.
Gambar 3.12 Pemilihan tipe file
3. Kemudian pilih “Yes” saat ada pilihan menggunakan CodeWizardAVR, seperti
Gambar 3.13 Dialog konfirmasi tentang penggunaan CodeWizardAVR
4. Pada setingan CodeWizardAVR, atur konfigurasi chip menggunakanATMega8535
sesuai dengan yang ada pada modul, dengan nilai clock 11,059200 MHz.
Gambar 3.14 Pemilihan tipe Mikrokontroler dan Kristal
5. Kemudian pada tab Port, PortA diatur sebagai input, PortA digunakan sebagai input
dari sensor yang akan digunakan untuk mendeteksi sinyal. Dan PortB diatur
sebagai input dan output yang akan dihubungkan dengan keypad. Tampilannya
Gambar 3.15 Seting PortA dan PortB
6. Selanjutnya mengatur penempatan LCD pada PortC. Tampilannya sebagai berikut:
7. Setelah itu, pilih menu File Generate, Save and Exit, dan simpan file dengan
nama sesuai keinginan uji.
Gambar 3.17 Generate, Save dan Exit
8. Akan muncul file.c yang akan digunakan untuk pemrograman. Selanjutnya ditulis
3.2.2 Perancangan Metode Penghitungan cos φφφφ oleh Mikrokontroler
Yang menjadi poin utama dalam penelitian ini adalah perbaikan faktor daya (cos φ),
maka metode penghitungannya perlu ditegaskan. Disini mikrokontroler ATMega8535
akan menerima sinyal masukan dari sensor tegangan dan sensor arus lalu
membandingkan keduanya terhadap waktu dan kemudian menghitung cos φ. Lalu
kedua jenis sinyal yang akan ditinjau dalam bentuk sinyal tegangan saja, karena
sensor arus akan memberikan keluaran ke mikrokontroler ATMega8535 dalam bentuk
tegangan.
Karena daya yang bersumber dari jala-jala PLN adalah 220 V dan memiliki
frekuensi 50 Hz, maka didapat perioda (T) dari sinyal tegangannya adalah 0,02 sekon.
Gambar 3.18 Metode perhitungan sinyal tegangan terhadap waktu
Sehingga pada sudut 90° perioda (T) sinyal tersebut adalah 5 ms. Maka lamanya
waktu untuk sudut 1° adalah 0,055556 ms atau sama dengan 55,56 µs. Untuk sensor
arus, metode perhitungan ini juga yang digunakan karena sensor arus arus tidak akan
mengalami pergeseran fasa.
Dari hasil perhitungan di atas waktu untuk setiap 1° sudah diketahui, maka
beda fasa sinyal arus dan tegangan sudah dapat dihitung. Dari hasil perhitungan yang
telah didapatmaka untuk mendapatkan besarnya sudut beda fasa antara sinyal arus dan
tegangan adalah dengan cara membagi selisih waktu munculnya sinyal arus dan
tegangan (zero cross) dengan 55,56 µs. Setelah besar sudutnya diketahui, maka nilai
cos φ sudah dapat dihitung oleh mikrokontroler ATMega8535 untuk kemudian