1
PENDAHULUAN
1.1 Latar Belakang
Tingkat kasus pencurian kendaraan bermotor di kota besar semakin banyak terjadi, itu dikarenakan kelalaian pengguna dan juga pelaku pencurian kendaraan bermotor semakin kreatif dalam modus pencurian. Dalam banyak kasus kehilangan kendaraan, peluang untuk mendapatkan kembali kendaraan sangatlah kecil. Itu dikarenakan para pelaku pencurian kendaraan bermotor biasanya langsung menyembunyikan barang hasil curian untuk beberapa waktu,. Dengan alat monitoring posisi kendaraan ini diharapkan peluang untuk mengetahui posisi kendaraan menjadi sangat memungkinkan.
Bagaimana mendapatkan informasi kendaraan berada, itu memungkinkan karena menggunakan GPS (Global Positioning System) pada kendaraan untuk mengirimkan posisi kendaraan, dengan mendapatkan nilai koordinat yang didapat dari GPS dan memasukannya kedalam peta digital kemudian dapat langsung menampilkan posisi kendaraan berada.
1.2 Maksud dan Tujuan
Maksud membuat alat pemantau posisi kendaraan adalah: 1. Meningkatkan keamanan pada kendaraan.
2. Memperbaiki keterbatasan dan kekurangan yang dimiliki speedometer
pada umumnya.
3. Memanfaatkan aplikasi GPS(Global Positioning System) pada kendaraan.
Tujuan membuat alat pemantau posisi kendaraan adalah: 1. Dapat mengetahui posisi kendaraan.
2. Alat bisa menampilkan informasi tambahan yang tidak terdapat pada panel
speedometer pabrikan.
3. Dapat mematikan dan mengaktifkan sistem pengapian kendaraan dengan sms.
1.3 Batasan Masalah
Masalah yang akan dikaji dan dibahas meliputi :
1. Alat tidak bisa mengirimkan informasi koordinat dengan baik apabila berada dalam ruangan tertutup.
1.4 Metodologi Penelitian
Dalam penyusunan tugas akhir ini penulis dalam melakukan penyusunan dan memperoleh data serta informasi menggunakan beberapa metode diantaranya adalah sebagai berikut:
1. Studi Literatur
Merupakan suatu metode pengumpulan data dengan cara mencari referensi buku dan mencari berbagai komponen pendukung yang akan dipakai dalam perancangan tugas akhir ini serta mempelajari bahasa pemrograman yang akan digunakan.
2. Metode Perancangan
Merancang pemantau posisi kendaraan kemudian mendesain mekanisme dan komponen yang dibutuhkan untuk mempermudah dalam perakitan ataupun pembuatannya.
3. Metode Pembuatan
Setelah mendesain mekanisme dan komponen yang dibutuhkan kemudian proses pembuatan pemantau posisi kendaraan ini dimulai. Pada tahap persiapan alat dan bahan baku yang dibutuhkan pada proses pembuatan serta mempersiapkan alat dan komponen apa saja yang dibutuhkan dalam proses pembuatan. Kemudian setelah semuanya terkumpul, maka dimulailah proses pembuatan pemantau posisi kendaraan.
4. Metode Pengujian
5. Metode Analisa
Merupakan tahap analisa dari hasil pengujian pemantau posisi kendaraan baik itu dari segi penerimaan, pengiriman informasi GPS dan sensor-sensor yang digunakan.
1.5 Sistematika Penulisan
Sistematika penulisan yang digunakan dalam laporan tugas akhir ini adalah sebagai berikut:
Bab I PENDAHULUAN
Bab 1 membahas mengenai latar belakang, maksud dan tujuan penelitian, batasan masalah, metode penelitian dan sistematika penulisan.
Bab II TEORI PENUNJANG
Bab 2 membahas tentang teori-teori dasar yang berhubungan dengan perangkat keras dan perangkat lunak yang digunakan untuk membangun pemantau posisi kendaraan.
Bab III PERANCANGAN SISTEM
Bab 3 membahas tentang perancangan perangkat keras dan perangkat lunak yang digunakan untuk membangun pemantau posisi kendaraan.
Bab IV HASIL PENGUJIAN DAN ANALISA
Bab 4 membahas tentang pengujian cara kerja pemantau posisi kendaraan dan hasil analisa.
Bab V KESIMPULAN DAN SARAN
5
TEORI PENUNJANG
Pada bab ini akan dibahas mengenai teori dan komponen penunjang yang
akan digunakan dalam perancangan “Rancang Bangun Alat Pemantau Posisi Kendaraan Bermotor”.
2.1 Sistem Kendali
Sistem Kendali atau control system terdiri dari dua kata yaitu system dan control. System berasal dari Bahasa Latin (systema) dan bahasa Yunani (sustema) adalah suatu kesatuan yang terdiri dari komponen atau elemen yang dihubungkan bersama untuk mencapai suatu tujuan tertentu. Control itu memiliki arti mengatur, mengarah dan mengendalikan. Jadi system control adalah hubungan antara komponen-komponen fisik yang membentuk suatu konfigurasi sistem sehingga memberikan hasil yang diharapkan atau dapat diperaktekan secara manual maupun dalam sistem yang otomatis. Hubungan antara input dan output pada sistem menunjukkan adanya hubungan sebab akibat dari sebuah proses, yang berawal dari input sampai bisa menghasilkan output. Maksud dari sistem kendali adalah menetapkan atau mendefinisikan input dan output. Jika input dan output
telah ditentukan, maka memungkinkan untuk menetapkan atau mendefinisikan sifat dari komponen-komponen sistem tersebut[1].
2.1.1 Jenis-Jenis Sistem Kendali
Jenis-jenis sistem kendali terdiri dari 2 macam yaitu sistem open loop dan sistem close loop.
2.1.1.1 Sistem Open Loop
sinyal masukan diberikan ke dalam sistem kendali dimana keluarannya bertindak sebagai sinyal penggerak dimana sinyal penggerak ini yang kemudian menghasilkan proses yang akan dikendalikan untuk menghasilkan output yang diinginkan. Proses open loop dapat dilihat pada gambar 2.1[1].
Gambar 2.1 Sistem Open Loop
2.1.1.2 Sistem Close Loop
Sistem kendali close loop adalah sistem kontrol yang memiliki feedback, berbeda dengan sistem open loop. Pada bagian output dari sistem kontrol ini akan dikirim kembali untuk dibandingkan dengan input yang diberikan. Bila masih terdapat selisih antara output dan input, maka sistem masih memiliki error. Error
merupakan selisih antara input dan output atau sistem belum mencapai hasil yang diinginkan. Proses kerja dari sistem close loop dapat dilihat pada gambar 2.2.
Gambar 2.2 Sistem Close Loop
2.2 Perangkat Keras 2.2.1 Mikrokontroler
Gambar 2.3 Ilustrasi mikrokontroler Beberapa fitur yang terdapat pada mikrokontroler adalah: 1. CPU (Central Processing Unit)
CPU adalah suatu unit pengolahan pusat yang terdiri dari 2 bagian, yaitu unit pengendali (Control Unit) dan logika (Arithmetic Logic Unit). Disamping itu, CPU mempunyai beberapa simpanan yang berukuran kecil yang disebut dengan register. Adapaun fungsi utama dari unit pengendali ini adalah mengatur dan mengendalikan semua peralatan yang ada pada sistem dan juga dapat mengatur kapan alat input menerima data dan kapan data diolah serta ditampilkan pada alat output. Sedangkan unit logika berfungsi untuk melakukan semua perhitungan aritmetika yang terjadi sesuai dengan instruksi program dan dapat juga melakukan keputusan dari operasi logika atau pengambilan keputusan sesuai dengan instruksi yang diberikan[1].
2. Bus Alamat
Bus alamat berfungsi sebagai sejumlah lintasan saluran pengalamatan. Pengalamatan ini harus ditentukan terlebih dahulu untuk menghindari terjadinya kesalahan pengiriman sebuah instruksi dan terjadinya tabrakan antara dua buah alat yang bekerja secara bersamaan[1].
3. Bus data
4. Bus control
Bus kontrol atau bus kendali berfungsi untuk mengintegrasi operasi mikrokontroler dengan operasi rangkaian luar[1].
5. Memori
Memori berfungsi untuk menyimpan data atau program. Ada beberapa jenis memori, diantaranya adalah ROM (Read Only Memory) dan RAM (Random Access Memory) serta berdasarkan tingkatannya, memori terbagi menjadi register internal, memori utama dan memori masal. Register internal adalah memori yang terdapat didalam ALU (Arithmetic Logic Unit). Memori utama adalah memori yang ada pada suatu sistem, waktu aksesnya lebih lambat dibandingkan dengan register internal. Sedangkan memori masal dipakai untuk menyimpan daya yang berkapasitas tinggi, yang biasanya berbentuk disket, pita magnetik atau kaset[1].
6. RAM (Random Access Memory)
RAM adalah memori yang dapat dibaca atau ditulis. Data dalam RAM bersifat volatile, dimana isinya akan hilang begitu IC kehilangan catu daya. Karena bersifat yang demikian, RAM hanya digunakan untuk menyimpan data pada saat program bekerja[1].
7. ROM (Read Only Memory)
8. Perangkat Input/output
Perangkat input dan output mikrokontroler adalah suatu peranti yang menghubungkan proses didalam mikrokontroler dengan dunia luar (rangkaian lain), peranti ini dibutuhkan sebagai media komunikasi dengan perangkat lain atau peubah tipe sinyal. Contoh perangkat I/O antara lain:
a. USART (Universal Synchronous Asynchronous Receiver Transmitter) merupakan adapter yang digunakan sebagai komunikasi serial sinkron
dan asinkron.
b. SPI (Serial Peripheral Interface) merupakan port komunikasi serial sinkron.
c. I2C bus (Inter-Itergrated Circuit Bus) merupakan antarmuka serial bus
yang dikembangkan oleh philihps.
d. Analog to Digital Conversion (ADC) adalah rangkaian yang digunakan untuk mengubah data analog ke data digital.
e. Digital to Analog (DAC)adalah rangkaian untuk mengubah data digital ke data analog.
f. Analog Comparator adalah rangkaian komparator tegangan, saat ini peranti ini telah terintegrasi dalam port mikrokontroler.
g. USB Converter merupakan peranti yang memungkinkan komunikasi
serial dengan karakteristik format komunikasi USB.
9. Clock
Clock atau pewaktu berfungsi memberikan referensi waktu dan sinkronisasi antar elemen.
2.2.1.1 Arduino
baterai.
Arduino Uno berbeda dari semua papan sebelumnya dalam hal tidak menggunakan FTDI chip driver USB-to-serial. Sebaliknya, fitur Atmega16U2 (Atmega8U2 sampai versi R2) diprogram sebagai konverter USB-to-serial. Revisi 2 dari Uno memiliki resistor pulling 8U2 HWB yang terhubung ke tanah, sehingga lebih mudah untuk menggunakan mode DFU.
Gambar 2.4 Alokasi Pin Arduino Uno R3
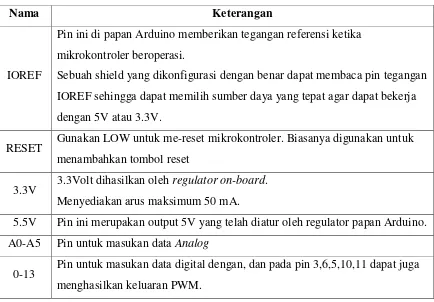
Tabel 2.1 Diskripsi Pin Arduino Uno R3
Nama Keterangan
IOREF
Pin ini di papan Arduino memberikan tegangan referensi ketika mikrokontroler beroperasi.
Sebuah shield yang dikonfigurasi dengan benar dapat membaca pin tegangan IOREF sehingga dapat memilih sumber daya yang tepat agar dapat bekerja dengan 5V atau 3.3V.
RESET Gunakan LOW untuk me-reset mikrokontroler. Biasanya digunakan untuk menambahkan tombol reset
3.3V 3.3Volt dihasilkan oleh regulator on-board. Menyediakan arus maksimum 50 mA.
5.5V Pin ini merupakan output 5V yang telah diatur oleh regulator papan Arduino. A0-A5 Pin untuk masukan data Analog
GND Pin untuk ground
AREF Tegangan referensi untuk input analog. Dapat digunakan dengan fungsi
analogReference.
2.2.2 Sistem Komunikasi Serial
Port serial adalah port yang paling populer digunakan untuk keperluan
koneksi ke piranti luar. Kata “Serial”, menggambarkan prinsip kerja port ini yang memberikan data. Cara kerjanya adalah diawali dengan mengambil sebuah byte data lalu kemudian mengirimkan perdelapan bit dalam byte tersebut satu persatu dalam satu jalur data. Keuntungannya adalah bahwa port ini hanya membutuhkan satu kabel untuk mengirimkan kedelapan bit tadi (dibandingkan port paralel yang membutuhkan delapan kabel). Keuntungan lainnya adalah efisiensi dalam biaya dan tentunya ukuran kabel yang kecil. Kerugiannya yakni bahwa port serial
membutuhkan delapan kali lebih lama untuk mengirimkan data dibanding dengan proses pengiriman dengan delapan kabel.
Terdapat dua cara dalam komunikasi data secara serial, yaitu komunikasi data serial secara sinkron dan komunikasi data serial secara asinkron. Pada komunikasi data serial sinkron, clock dikirimkan bersama-sama dengan data
serial, sedangkan pada komunikasi data asinkron clock tidak dikirimkan bersama data serial, tetapi dibangkitkan secara terpisah baik pada bagian pemancar maupun pada bagian penerima. Kecepatan pengiriman data dan fase clock pada bagian pemancar dan bagian penerima harus sinkron, untuk itu diperlukan
sinkronisasi antara dua bagian tersebut. Salah satu caranya adalah dengan mengirimkan bit ‘start’ dan bit ‘stop’. Untuk bit ‘start’ adalah data biner 0 dan untuk bit ‘stop’ adalah data biner 1. Setelah pengiriman bit ‘start’ maka akan diikuti oleh data yang akan dikirim , selanjutnya diakhiri dengan bit ’stop’. Berikut adalah contoh pengiriman karakter B2 heksa atau 10110010 biner tanpa
Gambar 2.5 Pengiriman Data Serial
Kecepatan pengiriman data (baud rate) bervariasi, mulai dari 110, 135, 150, 300, 600, 1200, 2400, 4800, 9600, 19200, 38400, 57600, 115200, 230400, 460800 dan 921600 (bit/detik). Pada komunikasi data serial baut rate dari kedua bagian harus diatur pada kecepatan yang sama. Setelah itu harus ditentukan panjang datanya, apakah 6, 7 atau 8 bit, juga apakah data disertai dengan paritas genap, paritas ganjil atau tidak menggunakan paritas. Untuk menentukan baud rate dapat dilihat pada persamaan di bawah ini:
Misalkan XTAL yang digunakan adalah = 11.0592 MHz Maka:
Machine Cycle Frequency = . 9 ���
= 921.6 kHz
(Machine Cycle = 12)
Machine Cycle Frequency Mode 1 = 9 . ��� = 57.600 Hz
(Bit Counter Mode 1 = 16)
Baud rate = . �� = 19.200 Baud rate
( 2 =8 bit data )
2.2.3 GSM (Global System for Mobile Communications)
GSM (Global System for Mobile Communications) adalah salah satu standar sistem komunikasi nirkabel (wireless) yang bersifat terbuka. Telepon GSM digunakan oleh lebih dari satu milyar orang di lebih dari 200 negara. Banyaknya standar GSM ini membuat roaming internasional sangat umum
pengertian lain dari Global System for Mobile communication (GSM) adalah sebuah standar global untuk komunikasi bergerak digital. GSM adalah nama dari sebuah group standarisasi yang dibentuk di Eropa tahun 1982 untuk menciptakan sebuah standar bersama telpon bergerak selular di Eropa yang beroperasi pada daerah frekuensi 900MHz. GSM saat ini banyak digunakan di negara-negara di dunia. GSM berbeda banyak dengan teknologi sebelumnya dalam pensinyalan dan
“channel” pembicaraan adalah digital, yang berarti dipandang sebagai sistem telepon genggam generasi kedua (2G). GSM merupakan sebuah standar terbuka yang sekarang ini dikembangkan oleh 3GPP[8].
Gambar 2.6 Arsitektur jaringan GSM
(GSM) Dari sudut pandang konsumen , keuntungan kunci dari sistem GSM adalah kualitas suara digital yang lebih tinggi dan alternative biaya rendah untuk menelpon dan juga pesan teks. Keuntungan bagi operator jaringan adalah
kemampuanya menerapkan peralatan dari “Vendor” yang berbeda karena standar terbuka membuat interoperasi menjadi mudah . Dan juga standar ini telah mengizinkan operator jarungan untuk menawarkan jasa roaming, yang berarti pengguna dapat menggunakan telepon mereka di seluruh dunia . GSM terus mendapat kompatibilitas dengan generasi sebelumnya, selagi standar GSM ini terus berkembang, contohnya kemampuan paket data ditambahkan ke versi
2.2.3.1 SMS (short messaging service)
Layanan SMS (Short Message Service) adalah sebuah layanan yang dilaksanakan dengan sebuah telepon genggam untuk mengirim atau menerima pesan-pesan pendek. Pada mulanya SMS dirancang sebagai bagian daripada GSM, tetapi sekarang sudah didapatkan pada jaringan bergerak lainnya termasuk jaringan UMTS. Sebuah pesan SMS maksimal terdiri dari 140 bytes, dengan kata lain sebuah pesan bisa memuat 140 karakter 8-bit, 160 karakter 7-bit atau 70 karakter 16-bit untuk bahasa Jepang, bahasa Mandarin dan bahasa Korea yang memakai Hanzi (Aksara Kanji / Hanja). Selain 140 bytes ini ada data-data lain yang termasuk. Dan apabila seorang pengguna akan mengirimkan SMS lebih dari 140 bytes, maka akan dikenakan biaya kelebihan dari 140 bytes.
SMS bisa pula untuk mengirim gambar, suara dan film. SMS bentuk ini disebut MMS. SMS dikirim dari sebuah telepon genggam ke pusat pesan (SMSC dalam bahasa Inggris), disini pesan disimpan dan mencoba mengirimnya selama beberapa kali. Setelah sebuah waktu yang telah ditentukan, biasanya 1 hari atau 2 hari, lalu pesan dihapus. Dan pengguna akan mendapatkan konfirmasi dari pesan yang sudah terkirim[8].
2.2.3.2 IComsat Iteadstudio
IComsat adalah sebuah modul komunikasi yang menyediakan jaringan GSM/GPRS sebagai media komunikasi. IComsat ini berbentuk shield yang bisa langsung diintegrasikan dengan Arduino UNO R3, shield pada Arduino merupakan sebuah modul yang dapat langsung dipasangkan pada Arduino, modul ini mudah di program untuk melakukan fitur-fitur dasar seperti mengirim, menerima sms, atau menelpon atau menerima panggilan melalui modul ini. Berikut beberapa fitur dari IComsat yang berbasis SIM900 ini.
Quad-Band 850/900/1800/1900MHz GPRS multi-slot calss 10/8
RTC support
Power on/off dengan Arduino interface
Gambar 2.7 Icomsat GSM/GPRS Module
2.2.4 GPS (Global Positioning Sistem)
GPS (Global positioning system) yang merupakan sistem untuk menentukan posisi dan navigasi secara global dengan menggunakan satelit. Sistem ini pertama kali dikembangkan oleh departemen pertahanan Amerika yang digunakan untuk kepentingan militer maupun sipil (survey dan pemetaan).
Sistem GPS yang nama aslinya adalah NAVSTAR GPS (Navigation Satellite Timing and Ranging Global Positioning System), mempunyai tiga segmen yaitu 9 satelit, pengontrol dan penerima/ pengguna. Satelit GPS yang mengorbit bumi, dengan orbit dan kedudukan yang tetap, seluruhnya berjumlah 24 buah dimana 21 aktif bekerja dan 3 buah sisanya adalah cadangan[2].
2.2.4.1 Penentuan Posisi Dengan GPS
Pada dasarnya penentuan posisi dengan GPS adalah pengukuran jarak secara bersama-sama ke beberapa satelit (yang koordinatnya telah diketahui) sekaligus. Untuk menentukan suatu titik di bumi, receiver setidaknya membutuhkan 4 satelit yang sinyalnya dapat ditangkap dengan baik. Secara
default posisi atau koordinat yang diperoleh mengacu ke global datum yaitu
World Geodetic System.
a. Metode absolut atau juga dikenal sebagai point positioning, menentukan posisi hanya berdasarkan pada pesawat penerima (receiver) saja. Ketelitian posisi dalam beberapa meter (tidak berketelitian tinggi) dan umumnya hanya diperuntukan bagi keperluan navigasi.
b. Metode relatif atau sering disebut differential positioning, menentukan posisi dengan menggunakan lebih dari sebuah receiver. Satu GPS dipasang pada lokasi tertentu di muka bumi dan secara terus menerus menerima sinyal dari satelit dalam jangka waktu tertentu dijadikan sebagai acuan bagi yang lainnya. Metode ini menghasilkan posisi dengan ketelitian tinggi dan diaplikasikan untuk keperluan survey geodesi ataupun pemetaan.
2.2.4.2 Sistem koordinat GPS
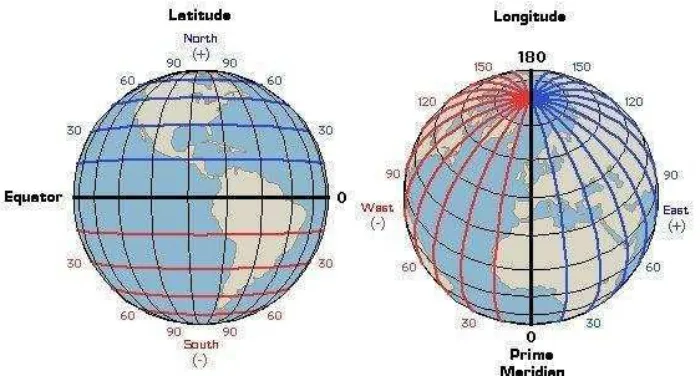
Pengenalan tentang sistem koordinat sangat penting agar dapat menggunakan GPS secara optimum. Koordinat GPS dapat diterima oleh sinyal GPS, sistem koordinat lokasi di bumi memilki dua bagian yaitu garis horizontal dan garis vertikal, diawali dengan dua koordinat letak bumi dari angka depan ketinggian (latitude) dan angka belakang panjang (longitude).
Latitude = garis lintang mengarah dari khatulistiwa (0) ke kutub selatan, atau khatulistiwa ke kutub utara (sudut 0-90° dan 0 -90°)
Longitude = garis bujur adalah garis horizontal seperti dari khatulistiwa. Sudut 0° (Greenwich) ke arah Hawai adalah 0°-180°, sedangkan kebalikannya dari 0° ke -180°
Gambar 2.8 Sistem koordinat latitude
Longitude adalah garis lintang, angka dari sudut bundar bumi horizontal. Titik diawali dari 0-180 derajat, dan 0-180 kearah sebaliknya, titik 0 dimulai dari Greenwich Inggris, kemudian mengarah ke Hawaii akan menjadi angka positif, dan kebalikan koordinat longitude merupakan arah kebalikanya.
Gambar 2.9 Sistem koordinat Longitude
2.2.4.3 Modul EM-411
SiRF Star III chipset
Sensitivitas tinggi, sampai 159dBm
TTFF (Time To First Fix) yang cepat pada sinyal rendah Foliage lock untuk pelacakan sinyal rendah
NMEA 0183 data protocol WAAS/EGNOS support
Built-in supercap untuk mempertahankan sistem data akuisisi satelit cepat
Gambar 2.10 Modul GPS EM-411
Gambar 2.11 Pin EM-411
Tabel 2.2 Pin Modul EM-411
No Pin Keterangan
1 GND Pin untuk ground
2 VCC Pin untuk Power Supply sebesar 4.5V ~6.5V
3 TX Sebagai pin transmisi mengirimkan data
4 RX Sebagai pin penerima data perintah dari perangkat lunak
2.2.5 Sensor suhu
Sensor suhu adalah alat yang digunakan untuk merubah besaran panas menjadi besaran listrik yang dapat dengan mudah dianalisis besaranya. Ada beberapa metode yang digunakan untuk membuat sensor ini, bisa salah satunya dengan menggunakan material yag bisa berubah hambatanya terhadap arus listrik sesuai suhunya.
2.2.5.1 Sensor suhu inframerah MLX90614
MLX90614 adalah sensor suhu inframerah yang dapat langsung digunakan dengan Arduino UNO R3 dengan komunikasi I2C, sensor ini merupakan sensor tanpa kontak, kita dapat langsung mendapatkan informasi tentang suhu suatu obyek tanpa harus melakukan kontak terhadap sensor tersebut. Resolusi dan keakuratan sensor ini sangat tinggi dan minim noise karena 17 –bit ADC yang terdapat didalamnya[7].
Gambar 2.12 Sensor MLX90614
2.2.6 LCD (Liquid Crystal Display)
karakternya dibentuk oleh 8 baris pixel dan 5 kolom pixel (1 baris terakhir adalah kursor).
Memori LCD terdiri dari 9.920 bir CGROM, 64 byte CGRAM dan 80x8 bit DDRAM yang diatur pengalamatannya oleh Address Counter dan akses datanya (pembacaan maupun penulisan datanya) dilakukan melalui register data.
Konfigurasi pin LCD untuk keperluan antar muka suatu komponen elektronika dengan mikrokontroler, perlu diketahui fungsi dari setiap kaki yang ada pada komponen tersebut[6].
Gambar 2.13 Blok Pin LCD
1. Kaki 1 (GND) : Kaki ini berhubungan dengan tegangan 0 volt (Ground). 2. Kaki 2 (VCC) : Kaki ini berhubungan dengan tegangan +5 Volt yang
merupakan tegangan untuk sumber daya..
3. Kaki 3 (VEE/VLCD) : Tegangan pengatur kontras LCD, kaki ini terhubung pada cermet. Kontras mencapai nilai maksimum pada saat kondisi kaki ini pada tegangan 0 volt.
4. Kaki 4 (RS) : Register Select, kaki pemilih register yang akan diakses. Untuk akses ke Register Data, logika dari kaki ini adalah 1 dan untuk akses ke Register Perintah, logika dari kaki ini adalah 0.
5. Kaki 5 (R/W) : Logika 1 pada kaki ini menunjukan bahwa modul LCD sedang pada mode pembacaan dan logika 0 menunjukan bahwa modul LCD sedang pada mode penulisan. Untuk aplikasi yang tidak memerlukan pembacaan data pada modul LCD, kaki ini dapat dihubungkan langsung ke
ground.
6. Kaki 6 (E) : Enable Clock LCD, kaki mengaktifkan clock LCD. Logika 1 pada kaki ini diberikan pada saat penulisan atau membacaan data.
8. Kaki 15 (Anoda) : Berfungsi untuk tegangan positif dari backlight LCD sekitar 4,5 volt (hanya terdapat untuk LCD yang memiliki backlight).
9. Kaki 16 (Katoda) : Tegangan negatif backlight LCD sebesar 0 volt (hanya terdapat pada LCD yang memiliki backlight).
2.2.7 Relay
Relay merupakan saklar elektronik yang dapat dikendalikan dari rangkaian elektronik lainnya. Yang dimana terdiri dari 3 bagian utama, yaitu:
Gambar 2.14 Relay
1. Koil : Lilitan dari relay
2. Common : Bagian yang tersambung dengan NC 3. Kontak : Terdiri dari NC (Normally Closed) dan NO
(Normally Open) 2.2.8 RTC (Real Time Clock)
Real Time Clock (RTC) merupakan suatu chip (IC) yang memiliki fungsi sebagai kalender dan jam elektronik dimana perhitungan hari, tanggal, bulan, tahun, jam, menit dan detik tersimpan di memori dengan alamat-alamat tertentu. Sistem perhitungan jam dan kalender pada RTC berjalan secara otomatis dan
continue walaupun power supply dimatikan.
saja.Untuk mendapatkan informasi waktu yang sesuai dengan keadaan waktu sebenarnya penulis menggunakan IC DS1307.
2.2.9 Catu Daya
Catu daya memegang peranan yang sangat penting dalam hal perancangan sebuah alat. Tanpa adanya masukan daya maka perangkat tidak dapat berfungsi. Begitu juga apabila pemilihan catu daya tidak tepat, maka perangkat tidak dapat bekerja dengan baik. Penentuan sistem catu daya yang akan digunakan ditentukan oleh beberapa faktor, diantaranya :
1. Arus
Arus memiliki satuan Ah (Ampere hour). Semakin besar Ah, semakin lama daya tahan baterai bila digunakan pada beban yang sama.
2. Teknologi Baterai
Baterai isi ulang ada yang dapat diisi hanya apabila benar-benar kosong dan ada pula yang dapat diisi ulang kapan saja tanpa harus menunggu baterai tersebut benar-benar kosong.
Catu daya yang akan digunakan pada perancangan alat ini adalah
PowerBank dan regulator.
2.2.9.1 Power Bank
Gambar 2.15 PowerBank
2.2.9.2 Regulator
Regulator tegangan menyediakan output tegangan DC yang konstan dan secara terus-menerus menahan tegangan output pada nilai yang diinginkan. Regulator hanya dapat bekerja jika tegangan input ( �� ) lebih besar daripada tegangan output ( � ). Biasanya perbedaan tegangan input dengan output yang direkomendasikan tertera pada datasheet komponen tersebut.
Gambar 2.16 Pin-out Regulator
2.3 Perangkat Lunak
2.3.1 Arduino IDE
Arduino IDE adalah perangkat lunak yang bisa digunakan untuk pemograman mikrokontroler. Perangkat lunak ini berupa algoritma kerja dari suatu alat yang berbentuk listing program yang ditanamkan ke dalam mikrokontroler.
Arduino Ide menghasilkan sebuah file berformat hex yang akan di-download pada papan arduino atau papan sistem mikrokontroler lainnya. Ini mirip dengan Microsoft Visual Studio, Eclipse IDE, atau Netbeans. Lebih mirip lagi adalah IDE semacam Code: Blocks, CodeLite atau Anjuta yang mempermudah untuk menghasilkan file program. Bedanya semua IDE tersebut menghasilkan program dari kode bahasa C (dengan GNU GCC) sedangkan Arduino Software (Arduino IDE) menghasilkan file hex dari baris kode yang dinamakan sketch.
Gambar 2.17 Arduino IDE
Intruksi pada perangkat lunak Arduino IDE relatif cukup banyak dan mudah digunakan. Sketch yang dibuat di Arduino Software di-compile dengan perintah verify. Verify bertujuan untuk memeriksa apakah sketch yang telah kita buat terdapat kesalahan atau tidak.
Tabel 2.3 Intruksi dasar pada Arduino IDE Intruksi Keterangan
Delay() Waktu dalam satuan ms Serial.Print() Mengirim data serial If... then Percabangan
AnalogRead() Membaca input analog Lcd.Print() Menampilkan ke LCD
Arduino Ide dapat digunakan pada operasi Windows pada komputer dengan sistem minimum sekalipun tanpa harus membutuhkan spesifikasi komputer yang canggih.
Gambar 2.18 Lembar kerja Arduino IDE
Gambar 2.18 merupakan tampilan awal dari arduino ide yang berjalan pada operasi sistem windows. Source code yang telah dibuat kemudian diubah oleh compiler menjadi bahasa mesin yang dimengerti oleh mikrokontroler. Bahasa mesin tersebut terdapat pada file dengan bentuk format .cpp. hex yang kemudian program tersebut dikirim ke dalam board Arduino langsung dengan perintah
2.3.2 Google Map
Google maps adalah sebuah jasa peta virtual gratis dan online yang disediakan oleh Google yang dapat diakses pada http://maps.google.com. Demi kemudahaan para pengguna penggunanya Google maps tersedia juga pada
platform mobile, aplikasi ini yang digunakan pada perancangan alat, Google maps versi mobile Gambar 2.19 dan homescreen Gambar 2.20. Dengan peta ini kita juga dapat melakukan navigasi menuju tempat yang sudah ditentukan terlebih dahulu yang nantinya akan memberikan rute secara otomatis dan memberikan informasi tambahan seperti jarak tempuh, dan waktu tempuh. Masing masing titik di dalam peta ini sudah memiliki masing masing titik koordinatnya, selanjutnya akan digunakan untuk memasukan nilai koordinat yang didapatkan dari modul GPS.
56
KESIMPULAN DAN SARAN
5.1. Kesimpulan
Setelah melakukan penelitian dan pengujian pada alat yang dibuat untuk tugas akhir ini, maka dapat diambil beberapa kesimpulan dari hasil pengujian dan penelitian tersebut, diantaranya adalah sebagai berikut :
1. Berdasarkan hasil pengujian mendapatkan koordinat dengan SMS pada 3 tempat yang berbeda kondisi dan lingkungan yang berbeda, pada daerah terbuka hasil dari gps dapat akurat dengan waktu rata-rata fix 63 detik dan selisih jarak 2,6 meter, dan pada daerah berpohon tinggi dan bergedung tinggi hasil gps kurang akurat dengan waktu fix rata-rata 88,2 detik dan selisih jarak 34,5 meter.
2. Relay berhasil mematikan sistem pengapian pada kendaraan.
3. Pengukuran dengan sensor suhu inframerah MLX90614 menghasilkan hasil terbaik dengan menggunakan field of view 90° dan jarak pengukuran 1cm, suhu rata- rata yang dihasilkan yaitu 69,60° celcius.
4. Hasil voltmeter digital pada sistem tidak mengalami perbedaan secara signifikan dengan voltmeter pembanding, perbedaan hanya 0,066volt pada kendaraan mati, dan 0,07volt pada kendaraanm menyala.
5. Alat berhasil menampilkan informasi tambahan yaitu berupa tanggal, waktu, jam, tegangan baterai kendaraan, dan infromasi suhu.
5.2. Saran
1. Dapat menggunakan modul GPS yang terbaru seperti EM-501 dengan chipset terbaru yang bisa melakukan fix posisi lokasi dengan lebih cepat dan akurat walaupun pada daerah minim sinyal.
2. Perlu riset lebih lanjut terhadap sensor suhu MLX90614, supaya dapat mengukur dengan lebih presisi dan akurat.
TUGAS AKHIR
Disusun Untuk Memenuhi Syarat Kelulusan Pada
Program Studi Strata Satu Sistem Komputer di Jurusan Teknik Komputer
Oleh
Indra Putra Utama
10209040
Pembimbing
Sutono, M.Kom
JURUSAN TEKNIK KOMPUTER
FAKULTAS TEKNIK DAN ILMU KOMPUTER
UNIVERSITAS KOMPUTER INDONESIA
BANDUNG
vii
LEMBAR PENGESAHAN ... i LEMBAR PERNYATAAN ... ii ABSTRAK ... iii ABSTRACT ... iv KATA PENGANTAR ... v DAFTAR ISI ... vii DAFTAR TABEL... x DAFTAR GAMBAR ... xi
BAB I PENDAHULUAN ... 1
1.1 Latar Belakang ... 1 1.2 Maksud dan Tujuan ... 2 1.3 Batasan Masalah... 2 1.4 Metodologi Penelitian ... 3 1.5 Sistematika Penulisan... 4
BAB II TEORI PENUNJANG ... 5 2.1 Sistem Kendali ... 5
2.1.1 Jenis-Jenis Sistem Kendali ... 5 2.1.1.1 Sistem Open Loop ... 5 2.1.1.2 Sistem Close Loop ... 6 2.2 Peangkat Keras ... 6 2.2.1 Mikrokontroler ... 6 2.2.1.1 Arduino ... 9 2.2.2 Sistem Komunikasi Serial ... 11 2.2.3 GSM (Global system for Mobile Communication) ... 12
viii
2.2.4.3 Modul EM-411 ... 14
2.2.5 Sensor Suhu ... 19
2.2.5.1 Sensor Suhu Inframerah MLX90614 ... 19
2.2.6 LCD (Liquid Cystal Display) ... 19
2.2.7 Relay ... 21
2.2.8 RTC (Real Time Clock) ... 21
2.2.9 Catu Daya ... 22
2.2.9.1 Power Bank ... 22
2.2.9.1 Regulator ... 23
2.3 Perangkat Lunak... 23
2.3.1 Arduino IDE ... 24
2.3.2 Google Map ... 26
BAB III PERANCANGAN SISTEM ... 28
3.1 Diagram Blok Sistem ... 28
3.2 Perancangan Perangkat Keras ... 29
3.2.1 Rangkaian Pengontrol Pemantau Posisi Kendaraan Bermotor ... 29
3.2.2 Rangkaian RTC ... 31
3.2.3 Modul GPS ... 32
3.2.4 Rangkaian Sensor Suhu... 33
3.2.5 Modul GSM/GPRS ... 34
3.2.6 Rangkaian Voltmeter ... 35
3.2.7 Power Bank ... 35
3.2.8 Rangkaian Relay ... 36
3.2.9 Desain Alat Pemantau Posisi Kendaraan ... 36
3.3 Peracangan Perangkat Lunak ... 37
3.3.1 Algoritma Dasar ... 38
BAB IV HASIL PENGUJIAN DAN ANALISA ... 43
ix
4.1.3 Pengujian Sensor Suhu MLX90614 ... 51
4.1.4 Pengujian Rangkaian Voltmeter ... 52
BAB V KESIMPULAN DAN SARAN ... 56
5.1 Kesimpulan ... 56
5.2 Saran ... 56
x
Tabel 2.1 Diskripsi Pin Arduino Uno R3 ... 10
Tabel 2.2 Pin Modul EM-411 ... 18
Tabel 2.3 Intruksi Dasar Pada Arduino IDE ... 24
Tabel 3.1 Pengaturan Pin Pada Arduino 1 ... 30
Tabel 3.2 Pengaturan Pin Pada Arduino 2 ... 31
Tabel 3.3 Penjelasan Masing-masing Fungsi Flowchart pada Algoritma Arduino 1 ... 40
Tabel 3.4 Penjelasan Masing-masing Fungsi Flowchart pada Algoritma Arduino 2 ... 41
Tabel 4.1 Hasil Pengujian pada Jl.Dipatiukur ... 43
Tabel 4.2 Hasil Pengujian pada Jl.Laswi ... 45
Tabel 4.3 Hasil Pengujian pada Jl.Dr.Otten ... 46
Tabel 4.4 Hasil Pengujian Rangkaian Relay ... 48
Tabel 4.5 Hasil pengujian suhu kendaraan menggunakan sensor MLX90614 dengan 45°field of view ... 51
Tabel 4.6 Hasil pengujian suhu kendaraan menggunakan sensor MLX90614 dengan 90°field of view ... 52
Tabel 4.7 Pengujian rangkaian voltmeter pada kendaraan menyala ... 53
xi
Gambar 2.1 Sistem Open Loop ... 6
Gambar 2.2 Sistem Close Loop ... 6
Gambar 2.3 Ilustrasi mikrokontroler ... 7
Gambar 2.4 Alokasi pin Arduino uno R3 ... 10
Gambar 2.5 Pengiriman data serial ...12
Gambar 2.6 Arsitektur jaringan GSM ...13
Gambar 2.7 Icomsat GSM/GPRS Module ...15
Gambar 2.8 Sistem koordinat latitude ... 17
Gambar 2.9 Sistem koordinat Longitude ... 17
Gambar 2.10 Modul GPS EM-411... 18
Gambar 2.11 Pin EM-411. ... 18
Gambar 2.12 Sensor MLX90614. ... 19
Gambar 2.13 Blok pin LCD ... 20
Gambar 2.14 Relay... 21
Gambar 2.15 PowerBank ... 23
Gambar 2.16 Pin-out Regulator ... 23
Gambar 2.17 Arduino IDE ... 24
Gambar 2.18 Lembar kerja Arduino IDE ... 25
Gambar 2.19 Google map mobile ... 26
Gambar 2.20 Home screen Google map ... 27
Gambar 3.1 Diagram blok sistem... 28
Gambar 3.2 Arduino Uno R3 ... 29
Gambar 3.3 Motherboard Arduino Uno R3 ... 30
Gambar 3.4 Rangkaian modul RTC ... 32
Gambar 3.5 Modul RTC ... 32
Gambar 3.6 Modul GPS EM-411... 33
Gambar 3.7 Rangkaian sensor suhu ... 33
Gambar 3.8 Modul Icomsat... 34
xii
Gambar 3.12 Alat pemantau posisi kendaraan ... 37
Gambar 3.13 Perancangan program ... 38
Gambar 3.14 Diagram alir algoritma Arduino 1 ... 39
Gambar 3.15 Diagram alir algoritma Arduino 2 ... 41
Gambar 4.1 Hasil SMS Jl.Dipatiukur ... 44
Gambar 4.2 Hasil koordinat Jl.Dipatiukur pada Google map ... 44
Gambar 4.3 Hasil SMS Jl.Laswi ... 45
Gambar 4.4 Hasil koordinat Jl.Laswi pada Google map ... 46
Gambar 4.5 Hasil SMS Jl.Dr.Otten ... 47
Gambar 4.6 Hasil koordinat Jl.Dr.Otten pada Google map ... 47
Gambar 4.7 Rangkaian relay ... 49
Gambar 4.8 Pengukuran objek dengan sensor suhu MLX90614 ... 52
Gambar 4.9 Hasil pengujian voltmeter pada kendaraan menyala ... 53
58
DAFTAR PUSTAKA
[1] Albert, P, Malvino. Prinsip-Prinsip Elektronika. Jilid 1, Jakarta : Salemba Teknika, 2003. [2] Abidin,Z Hasanudin. Penentuan Posisi Dengan Menggunakan GPS dan Aplikasinya,
Bandung :PT Pradayab Paramitha,2007.
[3] Endra Pitowarno. Robotika Disain, Kontrol, dan Kecerdasan Buatan, Yogyakarta, 2006 [4] (2014, oktober 28) dari
www.digi.com http://www.digi.com/support/kbase/kbaseresultdetl?id=2125 [5] (2014, Maret 20) dari
www.repository.usu.ac.id
http://repository.usu.ac.id/bitstream/123456789/27166/4/Chapter%20II.pdf [6] ( 2015, April 2 ) dari
http://elib.unikom.ac.id/gdl.php?mod=browse&op=read&id=jbptunikompp-gdl-dahlanperm-35496&q=dahlan.
[7] ( 2015, Mei 11 ) dari
http://www.melexis.com/Assets/IR-sensor-thermometer-MLX90614-Datasheet-5152.as [8] ( 2015, April 5 ) dari
DATA PRIBADI
Nama : Indra Putra Utama
Jenis kelamin : Laki-laki
Tempat, Tanggal Lahir : Cilegon, 5 Maret 1990
Kewarganegaraan : Indonesia
Status Perkawinan : Belum Menikah
Tinggi, Berat Badan : 170 cm, 60 kg
Kesehatan : Sangat Baik
Agama : Islam
Alamat Lengkap : Tubagus Ismail Bawah No.27A RT01/RW01 Sekeloa
Telepon : 08882324021
E-mail : [email protected]
RIWAYAT ORANG TUA
Nama Ayah : Muchlis
LATAR BELAKANG PENDIDIKAN
- Formal
SDN 2 ULAK KERBAU BARU, 2002 SMP YP FATAHILLAH CILEGON, 2005
SMA NEGERI 2 KRAKATAU STEEL CILEGON, 2008 UNIKOM (TEKNIK KOMPUTER), 2015
KEMAMPUAN
KemampuanTeknik Komputer dan Informatika (Networking, Mekatronika,embeded
system & control, basic programing)
PENGALAMAN KERJA
Kerja praktek di DISKOMINFO Jawa Barat Bandung, pada 2012 sebagai teknisi
jaringan.
Pada BUKA LAPAK.COM pada 2013 sebagai marketing produk non management
Bandung, Juli 2015
1
1,2Jurusan Teknik Komputer Unikom, Bandung
1[email protected],2[email protected]
Penggunaan GPS(Global positioning system) sangat berguna dalam membantu pekerjaan sehari- hari, perangkat ini sudah lama di gunakan oleh manusia utnuk mengetahui dimana posisi atau koordinat pengguna, aplikasinya banyak sekali dalam kehidupan modern saat ini, seperti navigasi, pemetaan, dan juga untuk keamanan. Tingkat pencurian kendaraan bermotor akhir-akhir ini sangat mengkhawatirkan, karena para pelaku pencurian sudah semakin maju dalam modus pencuriannya. Diperlukan suatu sistem untuk mengetahui dimana posisi kendaraan berada, dengan menggunakan fasilitas SMS(Short Mesagging Service), dengan melakukan perancangan “Rancang Bangun Alat Pemantau Posisi Kendaraan Bermotor”. Sistem dapat mengirimkan posisi dimana posisi kendaraan dikirim kan kepada pengguna dengan perintah dari SMS, dan pengguna juga dapat mematikan sistem pengapian pada kendaraan. Dan sistem juga dapat menampilkan informasi tambahan dimana informasi ini masih sedikit ada pada Speedometer standar pabrik. Informasi yang dikirimkan oleh sistem yaitu berupa koordinat kendaraan, kemudian dapat langsung di cari dengan aplikasi dari GoogleMaps dengan memasukan secara manual nilai koordinat kedalam aplikasi tersebut. Diharapakan Sistem ini dapat mempermudah untuk mengetahui posisi kendaraan pengguna.
Kata Kunci Arduino, GPS, iComsat, visual basic 6.0, antarmuka.
1. PENDAHULUAN
Tingkat kasus pencurian kendaraan bermotor di kota besar semakin banyak terjadi, itu dikarenakan kelalaian pengguna dan juga pelaku pencurian kendaraan bermotor semakin kreatif dalam modus pencurian. Dalam banyak kasus kehilangan kendaraan, peluang untuk mendapatkan kembali kendaraan sangatlah kecil. Itu dikarenakan para pelaku pencurian kendaraan bermotor biasanya langsung menyembunyikan barang hasil curian untuk beberapa waktu,. Dengan alat monitoring posisi kendaraan ini diharapkan peluang untuk mengetahui posisi kendaraan menjadi sangat memungkinkan.
Bagaimana mendapatkan informasi kendaraan berada, itu memungkinkan karena menggunakan GPS (Global Positioning System) pada kendaraan untuk mengirimkan posisi kendaraan, dengan mendapatkan nilai koordinat yang didapat dari GPS dan memasukannya kedalam peta digital kemudian dapat langsung menampilkan posisi kendaraan berada.
Dalam alat ini ditambahkan juga beberapa fitur tambahan untuk memonitoring kondisi kendaraan, seperti suhu mesin, dan tegangan baterai. Informasi tambahan ini sangat berguna yang biasanya diabaikan oleh pengguna untuk menjadi acuan perawatan kendaraan. Pada tugas akhir akan
dirancang sebuah alat “Rancang Bangun Alat
Pemantau Posisi Kendaraan Bermotor”. Yang
diharapkan masalah-masalah diatas dapat ditangani dengan maksimal dalam pekerjaanya.
1.1 Teori Penunjang
sistem kendali adalah hubungan antara komponen-komponen fisik yang membentuk suatu konfigurasi sistem sehingga memberikan hasil yang diharapkan atau dapat diperaktekan secara manual maupun dalam sistem yang otomatis. Jenis-jenis sistem kendali terdiri dari dua macam yaitu sistem
open loop dan sistem close loop[6].
komunikasi data adalah suatu cara untuk sebuah pertukaran data dari kedua pihak [2] . Dalam sebuah transmisi data dapat ditaransmisikan berupa
simplex yaitu sinyal ditransmisikan hanya pada satu
arah, half duplex yaitu kedua stasiun dapat
mentransmisikan komunikasi dua arah tetapi secara bergantian, atau full duplex yaitu kedua stasiun bisa mentransmisikan secara bersamaan [2].
Mikrokontroler merupakan rangkaian terintegrasi yang berisi komponen-komponen yang diperlukan oleh sebuah komputer seperti CPU, I/O, jalur komunikasi, memori, timer dan lain sebagainya. Mikrokontroler dapat diberi sebuah program yang bekerja sesuai dengan keinginan pengguna dan dapat dihapus dengan cara khusus [1].
2 Perancangan yang dilakukan terdiri dari perancangan perancangan perangkat keras dan perancangan perangkat lunak.
2.1 Perancangan Perangkat Keras
Desain pemantau posisi kendaraan sangat berperan penting dalam tugas akhir ini, karena dalam mendesain perlu adanya perhitungan dari berbagai komponen dan jenis bahan yang digunakan dalam pembuatan pemantau posisi kendaraan ini agar memiliki bentuk yang pas agar bisa di letakan pada kendaraan, dan juga pada posisi yang aman.
Gambar 2.1. Desain Keseluruhan Alat Pemantau Posisi Kendaraan.
2.1.1Diagram blok sistem
Sistem yang akan dirancang ditunjukkan pada Gambar 2.2.
Gambar 2.2 Diagram blok sistem
Berdasarkan diagram blok di atas pada sistem Pemantau posisi kendaraan, menggunakan dua
ukuran memory untuk perancangan alat pemantau posisi kendaraan. Pada Arduino pertama digunakan untuk mengontrol modul GPS, GSM, dan untuk mengaktifkan rangkaian relay. Pada Arduino kedua digunakan untuk mengontrol sensor suhu, tegangan, RTC, dan menampilkan informasi. mengkontrol berupa sensor-sensor, dan Arduino UNO 2 yang lain untuk mengontrol modul GSM dan rangkaian relay.
Gambar 2.3 Arduino UNO R3.
Mikrokontroler ini memiliki jumlah pin yang banyak yaitu 32 pin. Kemudahan dalam pemograman khususnya sebagai pengendalian sensor yang akan digunakan
Tabel 2.1 Pengaturan pin pada Arduino 1
Pin Deskripsi
5V Sebagai sumber daya modul yang terhubung
GND Ground sistem
A0 Pin untuk Voltmeter
3
2.1.3 Rangkaian RTC
Modul RTC (real time clock) adalah modul atau perangkat yang di gunakan untuk sebagai pewaktu. Modul ini dapat menampilakn informasi waktu, informasi tersebut cukup lengkap karena dapat menampilkan jam, menit, detik, tanggal, bulan, dan tahun. Modul RTC ini dibutuhkan untuk menampilakn tanggal dan waktu sehingga memudahkan pengguna untuk mengetahui informasi waktu.
Gambar 2.4. Modul RTC
2.1.4 Modul GPS
Modul GPS EM-411 digunakan untuk mendapatkan nilai koordinat yang akan dikirim oleh sistem melalui SMS, sebelum menggunakan sistem ini pastikan bahwa modul ini telah Fix posisi
Gambar 2.5 Modul GPS EM-411
2.1.5 Rangkaian sensor suhu
yaitu sensor suhu inframerah, tidak memerlukan kontak terhadap objek yang ingin diukur.
Gambar Rangkaian sensor suhu
2.1.6 Modul GSM/GPRS
Modul GSM/GPRS ini di gunakan untuk menerima perintah terhadap sistem alat pemantau posisi kendaraan yang didapatkan melalui layanan sms, digunakan juga untuk mengirimkan nilai koordinat yang di dapat melalui Modul GPS dan menerima perintah untuk mengaktifkan relay untuk mematikan dan mengaktifkan sistem pengapian kendaraan.
Gambar Modul GSM/GPRS
2.1.7 Desain alat pemanta posisi kendaraan
Desain pemantau posisi kendaraan sangat berperan penting dalam tugas akhir ini, karena dalam mendesain perlu adanya perhitungan dari berbagai komponen dan jenis bahan yang digunakan dalam pembuatan pemantau posisi kendaraan ini agar memiliki bentuk yang pas agar bisa di letakan pada kendaraan, dan juga pada posisi yang aman.
Gambar Alat pemantau posisi kendaraan 5V Sebagai sumber daya modul yang
6 Pemicu relay pemutus pengapian
4 Perancangan ini merupakan hal yang paling penting dalam perancangan sistem, pada bagian ini terdapat algoritma yang nantinya akan digunakan untuk mengendalikan alur kerja sistem secara keseluruhan.
Gambar 2.6. Diagram Alir Arduino 1.
Algoritma dasar merupakan algoritma yang mendasari algoritma system alat pemantau posisi kendaraan. Algoritma dasar ini yang natinya akan dikembangkan menjadi algoritma yang lebih komplek dan lebih spesifik lagi. Berikut ini merupakan diagram alir sederhana dari sistem alat pemantau posisi kendaraan yang dirancang.
Tabel 2.3 Penjelasan masing- masing fungsi flowchart pada Arduino 1
No Nama Penjelasan
1 Mulai Program mulai dijalankan. 2 Inisialisasi Menginisialisasikan port, GPS,
GSM Modul
Jika ada SMS dengan isi “Posisi”
maka lanjutkan ke no.7 6 Ambil data
dari GPS
Mengambil data GPS Longitude dan Latitude dan simpan pada dengan SMS, dan lanjut ke no.10 9 Hapus
SMS
Hapus perintah SMS yang diterima ,dan kembali ke no.5 10 SMS =
Kirim logika HIGH ke port digital
6 pada Arduino
12 Relay On Relay akan aktif dan sistem pengapian kendaraan bias digunakan
Kirim logika LOW ke port digital
6 pada Arduino
5
Gambar Diagram Alir Algoritma Arduino 2
Tabel 2.4 Penjelasan masing- masing fungsi flowchart pada Arduino 2
No Nama Penjelasan
1 Mulai Program mulai dijalankan. 2 Inisialisasi Menginisialisasikan port
sensor yang tersedia.
Perangkat keras yang diuji dibagi menjadi beberapa bagian utama yaitu pengujian mendapatkan posisi kendaraan melalui SMS, mematikan sistem pengapian melalui SMS, Pengujian sensor suhu MLX90614, dan pengujian voltmeter digital.
3.1 Pengujian mendapatkan posisi kendaraan melalui SMS
Pengujian untuk mendapatkan posisi dari kendaraan di lakukan pada 3 tempat yang berbeda, yaitu Jl.Dipatiukur, Jl.Laswi, dan Jl.Dr.Otten dengan kondisi lingkungan berbeda, di ambil data pengujian sebanyak 5 kali pada masing-masing tempat, nilai dari posisi asli didapatkan dengan memasukan secara manual posisi pada Google Map, dan perintah yang
digunakan pada sms adalah “posisi”. Dan hasil
pengujian sebagai berikut :
Dengan hasil pengujian yang diperoleh, dapat disimpulkan bahwa modul GPS akan dapat menentukan posisi dengan baik jika berada pada daerah yang terbuka dan tidak adanya penghalang dengan contoh pada Jl.Laswi, dan modul GPS akan berkurang keakuratanya jika digunakan pada daerah seperti di Jl.Dipatiukur dan Jl.Dr.Otten yang banyak penghalang seperti gedung besar dan pohon-pohon tinggi.
3.2Pengujian mematikan sistem pengapian melalui SMS
Pengujian ini dilakukan dengan menggunakan sebuah lampu led sebagai indikator bahwa sistem pengapian dimatikan atau diaktifkan dengan memutus tegangan CDI(Capacitor discharge ignition) yaitu otak dari pengapian pada kendaraan, Dan hasil pengujian sebagai berikut :
Tabel 3.2 Hasil pengujian rangkaian relay
6 Pengujian ini dilakukan untuk mendapatkan hasil dari sensor suhu yang di gunakan pada alat, sensor ini digunakan untuk mengetahui kondisi dari mesin kendaraan bermotor, Sensor suhu MLX90614 yang berjenis sensor inframerah, jadi dalam pemakaiannya untuk mengukur suhu suatu objek tidak di perlukan kontak dengan objek yang sedang diukur, pengukuran dilakukan pada kondisi suhu mesin setelah dihidupkan 5 menit hasil pengujian sebagai berikut :
Tabel 3.3 Hasil pengujian suhu kendaraan
Berdasarkan hasil pengujian sensor suhu MLX90614, bahwa hasil pengukuran objek dengan sensor MLX90614 pada field of view 45° dengan jarak 1- 5cm suhu rata-rata yang dihasilkan adalah 44,13° celcius dan apabila dengan menggunakan field of view 90° dan dengan jarak pengukuran 1cm dari permukaan objek menghasilkan rata- rata suhu permukaan yaitu 69,60° celcius.
3.4 Pengujian Voltmeter digital
Pengujian ini dilakukan untuk mendapatkan hasil dari rangkain voltmeter digital pada alat pemantau kendaraan, voltmeter sangat dibutuhkan mengetahui keadaan baterai, karena baterai pada sistem pengapian kendaraan sangat berperan penting, baterai harus selalu dalam kondisi 10V- 14V supaya CDI dapat berfungsi dengan baik, berikut hasil pengujian sebagai berikut :
Berdasarkan hasil pengujian voltmeter yang di lakukan bahwa hasil voltmeter pada sistem tidak mengalami perbedaan secara signifikan terhadap voltmeter pembanding yang digunakan, dengan hasil rata- rata perbedaan tegangan pada kondisi motor mati adalah 0,066 volt dan rata- rata perbedaan tegangan pada kondisi motor hidup adalah 0,07 volt. Perhitungan dengan rumus input port analog Arduino bernilai 0-1023, dan nilai resistor yang dipakai adalah R1= 10000, dan R2=4700, jadi berdasarkan angka tersebut dapat dihitung bahwa tegangan maksimal yang dapat di ukur adalah :
Diketahui :
Setelah melakukan penelitian dan pengujian pada alat yang di buat untuk tugas akhir ini, maka dapat diambil beberapa kesimpulan dari hasil pengujian dan penelitian tersebut, diantaranya adalah sebagai berikut :
1. Berdasarkan hasil pengujian mendapatkan koordinat dengan SMS pada 3 tempat yang berbeda kondisi dan lingkungan yang
No Jarak
14,55 volt 14,60 volt 0,05 volt
3
14,56 volt 14,58volt 0,02volt
4
14,60 volt 14,59 volt 0,01volt
5
14,59 volt 14,60 volt 0,01 volt
7 daerah berpohon tinggi dan bergedung tinggi hasil gps kurang akurat dengan waktu fix rata-rata 88,2 detik dan selisih jarak 34,5 meter.
2. Relay berhasil mematikan sistem pengapian pada kendaraan.
3. Pengukuran dengan sensor suhu inframerah MLX90614 menghasilkan data terbaik apalbila dengan menggunakan field of view 90° dan jarak pengukuran 1cm, suhu rata- rata yang di hasilkan yaitu 69,60° celcius. 4. Hasil voltmeter digital pada sistem tidak
mengalami perbedaan secara signifikan dengan voltmeter pembanding, perbedaan hanya 0,066volt pada kendaraan mati, dan 0,07volt pada kendaraan hidup.
.
4.2. Saran
Adapun saran dari penulis agar sistem ini dapat dikembangkan menjadi lebih baik adalah sebagai berikut :
1. Dapat menggunakan modul GPS yang terbaru seperti EM-501 dengan chipset terbaru dapat fix posisi lokasi dengan lebih cepat dan akurat walaupun pada daerah minim sinyal.
2. Perlu riset lebih lanjut terhadap sensor suhu MLX90614, supaya dapa mengukur dengan lebih presisi dan akurat
3. Perlu diriset pemutus pengapian dengan langsung memutus pengapian langsung yang menuju koil.
Jilid 1, Jakarta : Salemba Teknika, 2003. [2] (2014, oktober18) dari
v
KATA PENGANTAR
Assalamualaikum Warahmatullahi Wabarakatuh
Puji syukur penulis panjatkan ke hadirat Allah SWT, yang telah memberikan rahmat dan karunia-Nya kepada penulis sehingga penulis dapat menyelesaikan laporan tugas akhir ini. Dalam penyusunan tugas akhir ini penulis mendapat bimbingan dan dukungan dari banyak pihak, untuk itu penulis ingin mengucapkan terimakasih kepada:
1. Ibu Rusmala Dewi dan Ayah Muchlis yang sudah berjuang dengan sabar,
baik dengan do’a maupun ikhtiar. Semoga Allah SWT memberikan kemuliaan kepada keduanya di dunia dan kelak di akhirat, amin.
2. Bapak Sutono, M.kom selaku pembimbing I, yang telah memberikan bimbingan dan arahan kepada penulis.
3. Bapak Dr.Ir.Yeffry Handoko Putra, M.T selaku dosen wali yang memberi koreksi dan arahan selama menempuh perkuliahan.
4. Bapak John Adler, M.Si sebagai kepada ketua panitia Tugas Akhir yang banyak memberi kemudahan dalam proses Tugas Akhir dan perkuliahan penulis.
5. Bapak dan Ibu dosen, serta seluruh staf Jurusan Teknik Komputer Universitas Komputer Indonesia, yang telah banyak memberikan ilmu, wawasan, motivasi, serta bimbingan dan bantuan kepada penulis.
6. Ranti Meilia Sari yang membuat penulis selalu semangat untuk menyelesaikan tugas akhir ini.
7. Teman-teman DOLPUT, CE-2009, PRFB (Paguyuban Riders FU Bandung) penulis ucapkan banyak terimakasih atas dukungan dan motivasi yang kalian berikan selama ini, dan juga yang banyak memberi dukungan.
vi
9. Semua pihak yang telah banyak membantu penulis dalam mengerjakan tugas akhir ini yang tidak bisa penulis sebutkan satu persatu, penulis ucapkan terima kasih banyak atas bantuanya.
Atas segala kebaikan yang telah diberikan semoga Allah SWT, membalas budi baik semua pihak dengan kebaikan dan pahala yang berlipat. Penulis menyadari bahwa laporan tugas akhir ini masih memiliki kelemahan untuk itu kritik dan saran sangat diharapkan.
Wassalamualaikum Warahmatullahi Wabarakatuh
Bandung, Agustus 2015
ii
LEMBAR PERNYATAAN
Yang bertanda tangan dibawah ini:
Nama : Indra Putra Utama NIM : 10209040
Menyatakan bahwa Tugas Akhir ini adalah hasil karya sendiri dan bukan merupakan duplikasi sebagian atau seluruhnya dari hasil karya orang lain yang pernah dipublikasikan atau yang sudah pernah dipakai untuk mendapatkan gelar di Universitas lain, kecuali pada bagian dimana sumber informasi dicantumkan dengan cara referensi yang semestinya.
Pernyataan ini dibuat dengan sebenar-benarnya secara sadar dan bertanggung jawab dan saya bersedia menerima sanksi berupa pembatalan Tugas Akhir saya apabila terbukti melakukan duplikasi terhadap Tugas Akhir yang sudah ada.
Bandung, Agustus 2015
i
LEMBAR PENGESAHAN
RANCANG BANGUN ALAT PEMANTAU POSISI
KENDARAAN BERMOTOR
Disusun untuk memenuhi syarat kelulusan pada
Program Studi Sistem Komputer Strata Satu di Jurusan Teknik Komputer
INDRA PUTRA UTAMA
10209040
Bandung, Agustus 2015
Menyetujui, Pembimbing I
Sutono M.Kom NIP:4127.70.05.026
Mengetahui,
Dekan Fakultas Ketua Program Studi
Teknik dan Ilmu Komputer Teknik Komputer
Prof.Dr.H. Denny Kurniadie,Ir.,M.Sc Dr.Wendi Zarman.M.Si