2DPCA
A DAN JA
PEN
IN
ARINGAN
NGENAL
SRI
SEKOL
NSTITUT
N SYARA
LAN ROD
I DIANIN
LAH PASC
T PERTA
BOGO
2012
AF TIRUA
DA KEND
NG ASRI
CARJAN
ANIAN BO
OR
2
AN UNTU
DARAAN
NA
OGOR
UK MOD
N
Dengan ini saya menyatakan bahwa Integrasi Metode Circle Hough Transform, 2DPCA dan Jaringan Syaraf Tiruan untuk Model Pengenalan Roda Kendaraan adalah karya saya dengan arahan dari komisi pembimbing dan belum diajukan dalam bentuk apa pun kepada perguruan tinggi mana pun. Sumber informasi yang berasal atau dikutip dari karya yang diterbitkan maupun tidak diterbitkan dari penulis lain telah disebutkan dalam teks dan dicantumkan dalam Daftar Pustaka di bagian akhir tesis ini.
Bogor, September 2012
© Hak Cipta Milik IPB, tahun 2012
Hak Cipta dilindungi Undang-undang
Dilarang mengutip sebagian atau seluruh karya tulis ini tanpa mencantumkan atau menyebutkan sumbernya. Pengutipan hanya untuk kepentingan pendidikan, penelitian, penulisan karya ilmiah, penyusunan laporan, penulisan kritik, atau tinjauan suatu masalah dan pengutipan tersebut tidak merugikan kepentingan yang wajar IPB.
SRI DIANING ASRI
Tesis
Sebagai Salah Satu Syarat Untuk Memperoleh Gelar Magister Komputer pada
Program Studi Ilmu Komputer
SEKOLAH PASCASARJANA
INSTITUT PERTANIAN BOGOR
Judul Tesis : Integrasi Metode Circle Hough Transform, 2DPCA dan Jaringan Syaraf Tiruan untuk Model Pengenalan Roda Kendaraan
Nama Mahasiswa : Sri Dianing Asri Nomor pokok : G651100021
Disetujui, Komisi Pembimbing
Dr. Ir. Agus Buono, M.Si, M.Kom Faozan, S.Si, M.Si Ketua Anggota
Diketahui,
Ketua Program Studi Dekan Sekolah Pascasarjana Ilmu Komputer
Dr.Yani Nurhadryani S.Si, M.T Dr. Ir. Dahrul Syah, M.Sc.Agr
SRI DIANING ASRI. Integration Methode of Circle Hough Transform, 2DPCA and Artificial Neural Network for Recognition Model of Wheel Vehicle. Superviced by AGUS BUONO, and FAOZAN.
SRI DIANING ASRI. Integrasi metode Circle Hough Transform, 2DPCA dan Jaringan Syaraf Tiruan untuk Model Pengenalan Roda Kendaraan. Dibimbing oleh AGUS BUONO, dan FAOZAN.
Deteksi dan pengenalan kendaraan merupakan hal penting dalam sistem transportasi seperti analisa arus lalu lintas dan kebijakan pentarifan. Ciri pengenal yang dapat diambil untuk proses pengenalan kendaraan dari suatu citra digital berupa komponen kendaraan seperti, plat nomor, bentuk kendaraan, ataupun roda.
Roda merupakan komponen yang selalu ada pada setiap kendaraan, baik kendaraan itu berupa bus, mobil ataupun truk pasti memiliki roda dengan bentuk yang sama. Jika suatu roda dapat dideteksi dan dikenali maka klasifikasi kendaraan dapat ditentukan.
Penelitian ini menggunakan citra roda kendaraan yang diambil dari samping. Citra diambil dari perangkat kamera digital pada kondisi cerah pada waktu pagi dan siang hari. Deteksi citra roda kendaraan menggunakan Circle Hough Transformation (CHT) sebagai pengenal pola lingkaran. setelah pola lingkaran ditemukan dan dikelompokkan menjadi dua bagian yaitu roda dan non roda, kemudian direduksi dengan metode 2DPCA. Untuk pengenalan roda kendaraan dilakukan dengan menggunakan Jaringan Syaraf Tiruan Propagasi Balik.
Citra kendaraan yang digunakan dalam penelitian ini berjumlah 225 citra dibagi menjadi dua yaitu untuk pelatihan (Data Latih) sebesar 80% atau 180 citra dan sisanya untuk pengujian sebanyak 45 citra (Data Uji). Citra kendaraan melalui pemrosesan awal terlebih dahulu untuk menyiapkan citra meliputi pengubahan citra asli dalam RGB ke citra keabuan, setelah itu dipotong (cropping) secara horisontal pada bagian atas dan bagian bawah untuk mengurangi waktu pemrosesan dan membuang bagian citra lain yang tidak dibutuhkan. Pengurangan noise yang muncul pada citra, dilakukan dengan proses smoothing menggunakan filter average ukuran 5x5.
Arsitektur Jaringan Syaraf Tiruan (JST) Propagasi Balik menggunakan sebuah lapisan masukan, sebuah hidden layer dan sebuah lapisan keluaran. Masukan berasal dari citra yang telah melalui proses reduksi 2DPCA sedangkan keluaran memiliki satu target yaitu roda. Pelatihan JST Propagasi Balik menggunakan Data Latih dengan memvariasikan neuron pada hidden layer. Pengujian JST Propagasi Balik dilakukan dengan menggunakan Data Uji pada neuron hidden layer terbaik yang diperoleh pada tahapan pelatihan. Penelitian ini juga melakukan pengujian Data Uji yang diberi variasi Gaussian Noise dan Data Uji yang diberi lingkaran palsu dibagian tengah roda.
Hasil pengujian meliputi prosentase keberhasilan deteksi lingkaran dengan CHT, prosentase keberhasilan pengenalan JST, prosentase miss (roda tidak dikenali JST) dan prosentase false alarm rate (objek bukan roda dikenali sebagai roda oleh JST).
Alhamdulillahirobbil’alamin Segala Puji bagi Alloh SWT yang telah memberikan rahmat dan hidayah serta kemudahan sehingga Penulis dapat menyelesaikan tesis ini dengan baik. Sholawat dan salam semoga tercurahkan kepada junjungan Nabi Besar Muhammad SAW beserta keluarga beliau, sahabat beliau dan para pengikut beliau sampai akhir jaman.
Penulis berterima kasih yang sebesar-besarnya kepada Dr. Ir Agus Buono, M.Si, M.Kom dan Faozan, S.Si, M.Si selaku Dosen Pembimbing yang telah mengarahkan dan membimbing Penulis dalam menyelesaikan tesis ini. Ungkapan terima kasih juga Penulis haturkan kepada para Dosen dan seluruh pegawai di lingkungan Departemen Ilmu Komputer IPB.
Salam sayang tiada tara Penulis haturkan kepada Bapak, Mami, Mas Wawan, Mbak Andri, Bunbun, Wiwi, dan Chaca tercinta atas bantuan dan dukungan serta doanya.
Terakhir, special thank’s to : P Kodar, P Dedi, Teh Ana, Teh Kania, Ami, Prita, Mbak Yudith, Mila, Gibtha, Mbak Vera, Sari, Husna, Yustin, Safar, P Komar, P Ilyas, Asep, Mr. Ghani, Fikri, P Andy, P Irwan and Imam atas waktu, bantuan dan motivasinya, bersama kalian Penulis banyak belajar arti persahabatan. Semoga Alloh menjaga tali persaudaraan ini selamanya.
Penulis menyadari masih banyak kekurangan dalam tesis ini, oleh karena itu kritik dan saran yang membangun sangat Penulis harapkan untuk memperbaiki tesis ini. Atas perhatian Penulis ucapkan terima kasih.
Bogor, September 2012
Winulyo dan Siti Dalilah sebagai anak kedua dari empat bersaudara.
DAFTAR ISI
HalamanDAFTAR TABEL ... xii
DAFTAR GAMBAR ... xiii
DAFTAR LAMPIRAN ... xiv
PENDAHULUAN ... 1
Latar Belakang ... 1
Tujuan Penelitian ... 2
Ruang Lingkup Penelitian ... 2
Manfaat Penelitian ... 2
TINJAUAN PUSTAKA ... 3
Citra Digital ... 3
Citra RGB dan Derajat Keabuan (Gray Scale) ... 4
Smoothing ... 5
First Derivative Operator (Operator Derivatif Pertama) ... 6
Thresholding ... 6
Hough Transform ... 6
Circle Hough Transform (CHT) ... 7
Algoritma Titik Tengah ... 8
Two DimensionPrincipal Component Analysis (2DPCA) ... 9
Jaringan Syaraf Tiruan ... 11
Jaringan Syaraf Tiruan Propagasi Balik ... 12
Fungsi Aktivasi ... 13
Algoritma Pelatihan ... 13
Kejadian Biner (Binary Events) ... 16
METODE PENELITIAN ... 18
Kerangka Penelitian ... 18
Pengumpulan Data Citra ... 19
Pemrosesan Awal ... 19
Tahapan Pelatihan ... 19
Tahapan Pengujian ... 22
Evaluasi Hasil ... 23
HASIL DAN PEMBAHASAN ... 24
Pemrosesan Awal ... 24
SIMPULAN DAN SARAN...36
DAFTAR PUSTAKA...37
DAFTAR TABEL
Halaman
1 Empat kemungkinan keluaran pada kejadian biner ... 16
2 Parameter-Parameter CHT ... 20
3 Parameter-Parameter Jaringan Syaraf Tiruan Propagasi Balik ... 21
4 Nilai optimum untuk parameter-parameter CHT ... 28
DAFTAR GAMBAR
Halaman
1 Transformasi nilai piksel RGB ke citra keabuan ... 4
2 Filter mask3 5 ... 5
3 Matriks 3 5 dengan filter mask yang sesuai ... 5
4 Lingkaran dan titik-titik tepi lingkaran ... 7
5 Pencarian titik tengah lingkaran ... 8
6 Identifikasi objek ... 9
7 Model matematis nonlinier dari neuron dengan bias ... 11
8 Arsitektur Jaringan Syaraf Tiruan Propagasi Balik ... 12
9 Fungsi aktivasi sigmoid biner dengan range (0,1) ... 13
10 Sistem pengenalan roda kendaraan ... 18
11 Filter average ukuran 5x5. ... 19
12 Arsitektur JST Propagasi Balik untuk pengenalan roda kendaraan ... 21
13 Citra asli dimensi 640x480 piksel ... 24
14 Citra setelah pemrosesan awal ... 24
15 Nilai optimum parameter RadiusFilter LM. ... 25
16 Nilai optimum parameter Gradient Threshold ... 26
16 Deteksi lingkaran dengan nilai parameter multirad berbeda. ... 26
18 Nilai optimum parameter Multirad dan nilai minimal Radrange ... 27
19 Nilai maksimal untuk parameter Radrange ... 27
20 Hasil deteksi lingkaran CHT ... 28
21 Citra roda dan bukan roda sebelum normalisasi ... 29
22 Citra roda dan bukan roda setelah normalisasi ... 29
23 Lingkaran berwarna merah tanda roda dikenali oleh JST ... 30
24 Lingkaran roda yang tidak dikenali JST. ... 30
25 Objek bukan roda dikenali sebagai roda ... 31
26 Hasil pengujian JST dengan Data Uji ... 31
27 Pengujian kendaraan tiga gandar ... 32
28 Citra dengan berbagai varians Gaussian Noise ... 32
1 Hasil Deteksi Lingkaran CHT untuk Data Latih ... 39
2 Akumulasi Prosentase Informasi 2DPCA ... 41
3 Pelatihan dan Pengujian JST untuk Data Latih ... 42
4 Pengujian JST untuk Data Uji ... 43
PENDAHULUAN
Latar Belakang
Deteksi dan pengenalan kendaraan merupakan hal yang penting dalam
sistem transportasi seperti analisa arus lalu lintas dan kebijakan pentarifan.
Pengenalan kendaraan dapat dilakukan dengan memanfaatkan pengolahan citra
digital. Citra berasal dari seperangkat kamera digital ataupun kamera video. Ciri
pengenal yang dapat diambil untuk proses pengenalan kendaraan dari suatu citra
digital berupa komponen kendaraan seperti, plat nomor, bentuk kendaraan,
ataupun roda.
Roda merupakan komponen yang selalu ada pada setiap kendaraan, baik
kendaraan itu berupa bus, mobil ataupun truk pasti memiliki roda dengan bentuk
yang sama. Jika suatu roda dapat dideteksi dan dikenali maka pengenalan dan
klasifikasi kendaraan dapat ditentukan. Citra roda dapat diambil dari depan,
belakang ataupun samping (side view).
Pengolahan citra digital untuk pengenalan klasifikasi kendaraan yang sudah
ada, mendasarkan pada citra plat nomor kendaraan. Teknik ini sangat baik, akan
tetapi masih memiliki kekurangannya seperti standarisasi penomoran, plat kotor,
rusak, palsu, atau dilapisi plastik tertentu sehingga menyulitkan pembacaan.
Untuk itu penelitian mengenai pengenalan kendaraan melalui komponen
kendaraan lainnya seperti roda kendaraan banyak dilakukan.
Pemrosesan citra roda yang diambil dari samping telah dilakukan oleh Ofer
Achler & Mohan M. Trivedi, tahun 2003 mendeteksi roda kendaraan yang
diambil dari kamera rectilinier dengan menggunakan metode Gaussian
Filterbank, PCA dan Gaussian Mixture dengan tingkat keberhasilan 70%,
kemudian melanjutkan penelitiannya pada tahun 2004 mendeteksi roda dari
kendaraan bergerak yang diambil dari kamera omnidireksional dengan
menggunakan metode 2D Filterbanks dan Gaussian Mixture dengan tingkat
keberhasilan pengenalan sebesar 78%. Penelitian terkait berikutnya dilakukan
oleh Yu Fai Fung et al, 2006 mendeteksi jenis kendaraan dijalan tol melalui roda
yang digunakan adalah Hough Transform, deteksi Canny, Sobel Filtering dan
Haar Wavelet, hasil yang dicapai berupa waktu deteksi roda kendaraan.
Penelitian ini menggunakan citra roda kendaraan yang diambil dari
samping. Citra diambil dari perangkat kamera digital pada kondisi cerah pada
waktu pagi dan siang hari. Citra roda kendaraan dideteksi menggunakan Circle
Hough Transformation (CHT). Transformasi ini mampu mengenali objeknya
berdasarkan batas-batasnya dan tahan terhadap noise, setelah pola lingkaran
ditemukan dan dikelompokkan menjadi dua bagian yaitu roda dan non roda,
kemudian direduksi dengan metode 2DPCA. Untuk pengenalan roda kendaraan
dilakukan dengan menggunakan Jaringan Syaraf Tiruan Propagasi Balik.
Tujuan Penelitian
Penelitian ini bertujuan untuk membangun sebuah model pengenalan roda
kendaraan menggunakan tiga metode yaitu, Circle Hough Transform, 2DPCA
dan Jaringan Syaraf Tiruan.
Ruang Lingkup Permasalahan
Ruang lingkup permasalahan dalam penelitian ini adalah mendeteksi dan
mengenali roda kendaraan menggunakan Cycle Hough Transform (CHT) sebagai
deteksi lingkaran roda, 2DPCA sebagai ekstrasi ciri dan Jaringan Syaraf Tiruan
Propagasi Balik sebagai pengenal pola. Citra kendaraan berasal dari kendaraan
yang diambil dari samping (side view) menggunakan kamera digital dengan
dimensi 8 yang diambil pada waktu pagi dan siang hari pada kondisi
cerah.
Manfaat Penelitian
Manfaat penelitian ini adalah memberikan hasil pengenalan roda kendaraan
yang dapat dikembangkan untuk sistem pengenalan kendaraan berdasarkan jarak
TINJAUAN PUSTAKA
Dalam bab ini akan dibahas teori-teori yang mendasari penelitian ini.
Dimulai dari teori dan konsep citra digital, deteksi pola lingkaran dengan Circle
Hough Transform (CHT), ekstrasi ciri pola lingkaran menggunakan Two
Dimension Principle Component Analysis (2DPCA) serta proses pengenalan roda
kendaraan dengan Jaringan Syaraf Tiruan Propagasi Balik.
Citra Digital
Citra digital merupakan sebuah larik (array) berisi nilai-nilai riil maupun
kompleks yang dapat direpresentasikan dengan deretan bit tertentu, yang
didefinisikan sebagai fungsi dua dimensi f(x,y) berukuran matriks M kali N,
dimana M adalah baris dan N adalah kolom serta x dan y adalah pasangan
koordinat spasial (Gonzales, et al 2004).
Nilai f pada titik koordinat (x,y) disebut sebagai skala keabuan (gray level)
atau intensitas dari citra digital pada koordinat koordinat tersebut. Apabila nilai x,
y dan f secara keseluruhan berhingga dan bernilai diskrit maka citra tersebut
merupakan citra digital.
Citra digital direpresentasikan dalam bentuk matriks persegi yang
mewakili ukuran dari citra tersebut. Misalkan terdapat sebuah citra digital dengan
ukuran MxN, maka citra dapat direpresentasikan dalam sebuah matriks berukuran
MxN sebagai berikut:
, , , ,
, , , ...(1)
Persamaan matriks diatas memperlihatkan irisan antara baris dan kolom
(pada posisi x dan y) dikenal dengan nama picture elemen (pixel). Pixel memiliki
intesitas yang dapat dinyatakan dengan bilangan dengan rentang tertentu, dari
nilai minimum sampai maksimum. Jangkauan yang digunakan berbeda-beda
Citra RGB dan Derajat Keabuan (Gray Scale)
Citra RGB dan derajat keabuan merupakan format warna pada citra
digital. Citra warna RGB memiliki kombinasi warna Red(R), Blue(B), dan
Green(G) disetiap pikselnya. Setiap komponen RGB memiliki intensitas dengan
nilai minimal 0 dan maksimal 255 (8 bit). Setiap piksel pada citra RGB
membutuhkan 3 Byte untuk media penyimpanan, sehingga kemungkinan jumlah
kombinasi citra RGB adalah lebih dari 16 juta warna.
Citra keabuan merupakan citra digital yang hanya memiliki sebuah kanal
pada setiap pixel, dengan kata lain bagian warna Red(R) sama dengan bagian
Green(G) sama dengan bagian Blue(B) (Gonzales et al, 2004). Derajat keabuan
merupakan warna abu dengan berbagai tingkatan dari warna hitam (minimum) ke
putih (maksimum). Jumlah maksimum warna terdiri atas 4 bit dan 8 bit. Citra
dengan derajat keabuan 4 bit memiliki 16 kemungkinan warna, yaitu 0 sampai 15.
Setiap pixel citra dengan nilai intensitas keabuan 8 bit sehingga terdapat 256
kombinasi nilai dimulai dari 0 sampai dengan 255. Persamaan berikut
memperlihatkan konversi citra RGB ke dalam citra keabuan (Qur’ania 2012) :
, , , , ...(2)
Persamaan (2) akan memetakan fungsi , yang merupakan nilai piksel citra
RGB menjadi fungsi keluaran , sebagai citra keabuan. Gambar 1
memperlihatkan perubahan nilai piksel RGB ke derajat keabuan.
, R= 50 G= 60 B= 40 R= 55 G= 70 B= 55 R= 35 G= 50 B= 50 R= 70 G= 80 B= 60
50 60 45 70
R= 55 G= 70 B= 55 R= 55 G= 65 B= 45 R= 45 G= 60 B= 60 R= 60 G= 30 B= 45
60 55 55 45
R= 50 G= 50 B= 50 R= 50 G= 60 B= 40 R= 70 G= 70 B= 70 R= 70 G= 45 B= 50
50 50 70 55
Citra RGB Citra keabuan
Smoothing
Smoothing citra masukan dilakukan dengan maksud untuk mengurangi
respons sistem terhadap noise atau menyiapkan citra untuk proses segmentasi.
Banyak jenis algoritma smoothing dengan menggunakan linear filter ataupun
non-linear filter. Smoothing dengan menggunakan linear filter mengacu pada Low
Pass Filter (LPF).
Penapis rata-rata (average filter) merupakan salahsatu LPF yang
digunakan untuk mengurangi detil yang ‘irrelevant’ dalam suatu citra. Secara
umum average filter dapat diberi bobot tertentu dengan maksud untuk
mengurangi noise dalam proses smoothing. untuk menapis citra berukuran
dengan filter mask (selubung penapis) terbobot ukuran diberikan dalam
persamaan berikut: (Gonzales, et al 2002)
, ∑ ∑∑ ∑ , , , ...(3)
dengan dan . persamaan diatas digunakan untuk
, , , … . , dan , , , … . , . Gambar 2 memperlihatkan filter
mask 3 5 dan matriks 3 5 dengan nilai piksel yang sesuai dengan filter mask
tersebut (Gambar 3).
W(-1,-2) W(-1,-1) W(-1,0) W(-1,1) W(-1,2)
W(0,-2) W(0,-1) W(0,0) W(0,1) W(0,2)
W(1,-2) W(1,-1) W(1,0) W(1,1) W(1,2)
Gambar 2 Filter mask3 5.
f(x-1,y-2) f(x-1,y-1) f(x-1,y) f(x-1,y+1) f(x-1,y+2)
f(x,y-2) f(x,y-1) f(x,y) f(x,y+1) f(x,y+2)
f(x+1,y-2) f(x+1,y-1) f(x+1,y) f(x+1,y+1) f(x+1,y+2)
First Derivative Operator (Operator Derivatif Pertama)
Dalam deteksi tepi, proses smoothing saja terkadang tidak cukup, untuk itu
diperlukan kombinasi antara teknik smoothing dengan algoritma derivatif, hal ini
dilakukan untuk meningkatkan akurasi serta mengurangi respons ganda terhadap
suatu tepi.
Derivatif pertama dalam pemrosesan citra menerapkan magnitudo gradien.
Untuk fungsi , gradien dari f pada koordinat (x,y) didefinisikan sebagai
vektor kolom dua dimensi sebagai berikut:
...(4)
Sedangkan untuk magnitudo dari vektor tersebut diberikan dalam
persamaan berikut:
/
⁄ ...(5)
Thresholding
Walaupun citra awal telah mengalami smoothing dan filtering pada tahap
awal, masih saja memungkinkan bagi keluaran tahapan sebelumnya mengalami
kesalahan disebabkan oleh noise. Untuk mengatasi hal tersebut, maka dilakukan
thresholding. Melalui penetapan nilai threshold (nilai ambang), maka nilai yang
berada dibawah nilai ambang akan diabaikan.
Hough Transform
Hough Transform (HT) merupakan suatu teknik ekstrasi fitur yang
dipergunakan untuk menentukan lokasi suatu bentuk dalam citra. HT
diperkenalkan oleh Paul Hough pada 1962. Rosenfeld (1969) menggunakannya
sebagai salah satu algoritma pemrosesan citra, kemudian tahun 1972 Duda, et al
menerapkan HT untuk mendeteksi garis dalam citra.
HT telah dikembangkan untuk mendeteksi bentuk-bentuk umum dalam
terdapat garis dan kurva potensial yang tak terhitung jumlahnya pada suatu citra
yang melalui titik mana saja pada berbagai ukuran dan orientasi. Tujuan
transformasi adalah untuk menemukan garis dan kurva yang melewati banyak
titik-titik (features) dalam citra, yaitu garis dan kurva terdekat yang paling sesuai
dengan data dalam citra. Kelebihan HT adalah tahan terhadap gangguan (noise
robust) dan kemampuannya untuk mengekstrasi garis maupun kurva bahkan
dalam suatu area dengan ketidakhadiran piksel (pixel gaps) (Argialas &
Mavrantza 2004).
Circle Hough Transform (CHT)
HT dapat didefinisikan menggunakan persamaan lingkaran. Persamaan
lingkaran tersebut dapat dilihat pada persamaan 6. Persamaan ini mendefinisikan
lingkaran sebagai semua titik , yang berada pada radius r terhadap titik pusat
, . Persamaan lingkaran yang umum adalah:
...(6)
Pada metode hough circle, setiap titik tepi mendefinisikan lingkaran dalam
ruang akumulator (accumulator space) dengan tiga buah parameter lingkaran
yaitu, , , dan r. Setiap titik tepi , dapat dihitung menggunakan persamaan
berikut:
cos ...(7) sin ...(8)
Lingkaran ini diperoleh dari nilai kemungkinan radius dan lingkaran
dipusatkan pada koordinat dari setiap titik tepi seperti diperlihatkan pada Gambar
4 berikut:
Algoritma Titik Tengah
Tahapan-tahapan pencarian titik tengah dalam pencarian lingkaran dengan
CHT adalah sebagai berikut :
1. Pencarian lingkaran dimulai dengan suatu titik pada gambar yang bukan
background.
2. Diasumsikan titik tersebut terdapat pada tepi dari suatu lingkaran
3. Kemudian dilakukan proses pencarian titik tengah dari lingkaran tersebut,
yaitu dengan langkah-langkah (Gambar 5) sebagai berikut:
Gambar 5 Pencarian titik tengah lingkaran.
a. Telusuri gambar kebawah sampai menemukan tepi lingkaran sambil
menghitung jarak ketepi lingkaran tersebut. Jika ada, maka diperoleh
informasi mengenai titik tengah dari tinggi lingkaran, yaitu dari titik
awal pergerakan ditambah dengan jarak/2. Jika tidak maka objek
bukan lingkaran.
b. Titik tengah yang diperoleh pada langkah sebelumnya belum tentu
merupakan titik tengah dari lingkaran, tetapi hanya titik tengah dari
tinggi lingkaran. Jadi selanjutnya akan dicari titik tengah dari lebar
lingkaran.
c. Dari titik tengah yang diperoleh pada (b), telusuri gambar ke kanan
sampai menemukan tepi sambil menghitung jarak ke tepi lingkaran
tersebut. Jika ada, maka diperoleh informasi mengenai titik tengah dari
lebar lingkaran, yaitu dari titik awal pergerakan ditambah dengan
d. Diperoleh informasi titik tengah dan radius dari objek tersebut.
4. Jika radius lebih besar dari threshold, maka dilakukan identifikasi objek.
5. Identifikasi objek dilakukan sebagai berikut (Gambar 6) :
Gambar 6 Identifikasi objek.
a. Lakukan rotasi 3600 berlawanan arah jarum jam, yaitu dengan
menggunakan loop.
b. Untuk setiap iterasi, hitung titik , , yaitu titik yang berjarak radius
r dari titik pusat dan memiliki sudut yang bersesuaian dengan ietarsi
yang dilakukan.
c. Pada titik tersebut dan pada n-tetangga disekitarnya (n adalah toleransi
ketetanggaan), dilakukan pemeriksaan. Nilai n ini bergantung pada
radius objek yaitu, semakin besar radius objek, maka semakin besar
nilai n, dan sebaliknya. Jika salah satu dari titik tersebut merupakan
titik tepi, maka iterasi dilanjutkan. Jika tidak satupun dari titik-titik
tersebut yang merupakan titik tepi, maka objek bukan lingkaran,
d. Jika iterasi berakhir dengan sukses, maka objek adalah lingkaran.
Two Dimension Principal Component Analysis (2DPCA)
Principal Component Analysis (PCA) merupakan salah satu metode
analisis peubah ganda yang mereduksi dimensi data tanpa harus kehilangan
informasi yang berarti (Buono & Irmansyah 2009). Peubah hasil transformasi
merupakan kombinasi linear dari peubah asli dan tidak terkorelasi antar
ekstrasi fitur yang digunakan secara luas dalam pengolahan sinyal dan pengenalan
pola. Sirovich dan Kirby pertama kali menggunakan PCA dalam
merepresentasikan citra wajah orang (Yang, et al 2004).
Menurut Yang, et al teknik 2DPCA memiliki kelebihan dibandingkan
dengan teknik PCA (eigenfaces), diantaranya yaitu 2DPCA didasarkan pada
matriks citra sehingga lebih sederhana dan straighforward untuk digunakan pada
ekstrasi fitur citra. Selain itu, 2DPCA lebih baik dari PCA dalam hal keakuratan
pengenalan pada semua eksperimen dan secara komputasional lebih efisien
daripada PCA dan dapat meningkatkan kecepatan ekstrasi fitur citra secara
signifikan.
Dalam teknik proyeksi citra dengan 2D-PCA, sebuah citra berdimensi
akan dibaca sebagai matriks A berdimensi dan tidak diubah
menjadi bentuk vektor. matriks A ini ditransformasi menggunakan matriks
menjadi Y sebagai berikut, (Yang, et al 2004):
dengan ...(9)
Permasalahannya adalah bagaimana menemukan matriks transformasi Q
yang memaksimalkan persebaran Y. Persebaran Y dapat dikarakterisasi oleh teras
matriks koragam, S yang dirumuskan sebagai:
...(10)
Dan teras matriks S adalah:
...(11)
Dicari nilai:
...(12)
G dihitung dari sampel citra pelatihan. Anggap terdapat M citra pelatihan,
∑ ...(13)
Oleh karena itu matrik Q yang dipilih adalah :
, , , … .,
dengan merupakan vektor ciri yang bersesuaian dengan akar ciri terbesar ke i
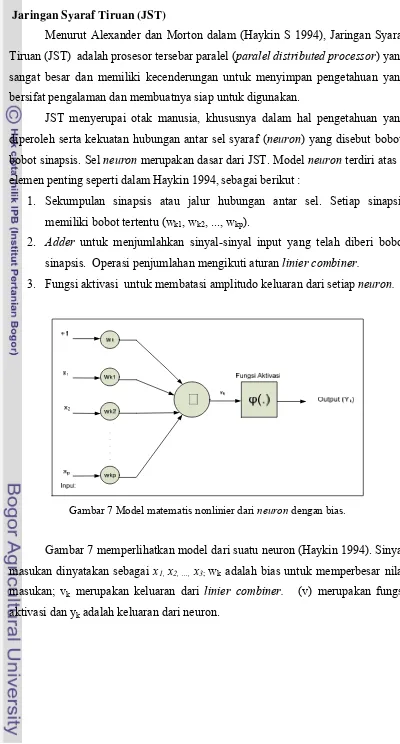
Jaringan Syaraf Tiruan (JST)
Menurut Alexander dan Morton dalam (Haykin S 1994), Jaringan Syaraf
Tiruan (JST) adalah prosesor tersebar paralel (paralel distributed processor) yang
sangat besar dan memiliki kecenderungan untuk menyimpan pengetahuan yang
bersifat pengalaman dan membuatnya siap untuk digunakan.
JST menyerupai otak manusia, khususnya dalam hal pengetahuan yang
diperoleh serta kekuatan hubungan antar sel syaraf (neuron) yang disebut
bobot-bobot sinapsis. Sel neuron merupakan dasar dari JST. Model neuron terdiri atas 3
elemen penting seperti dalam Haykin 1994, sebagai berikut :
1. Sekumpulan sinapsis atau jalur hubungan antar sel. Setiap sinapsis
memiliki bobot tertentu (wk1, wk2, ..., wkp).
2. Adder untuk menjumlahkan sinyal-sinyal input yang telah diberi bobot
sinapsis. Operasi penjumlahan mengikuti aturan linier combiner.
3. Fungsi aktivasi untuk membatasi amplitudo keluaran dari setiap neuron.
[image:30.595.104.504.98.842.2]Gambar 7 Model matematis nonlinier dari neuron dengan bias.
Gambar 7 memperlihatkan model dari suatu neuron (Haykin 1994). Sinyal
masukan dinyatakan sebagai x1, x2, ..., x3; wk adalah bias untuk memperbesar nilai
masukan; vk merupakan keluaran dari linier combiner. (v) merupakan fungsi
Jaringan Syaraf Tiruan Propagasi balik
Salah satu arsitektur yang banyak digunakan adalah multilayer
feedforward network.Secara umum terdiri dari beberapa unit neuron yaitu lapisan
masukan, satu atau lebih lapisan tersembunyi (hidden layer) dan sebuah lapisan
keluaran. Sinyal masukan dipropagasikan ke arah depan (ke lapisan keluaran).
Jenis jaringan ini adalah hasil generalisasi dari arsitektur perceptron satu lapis,
dikenal sebagai multilayer perceptrons (MLPs). Jaringan multilayer disebut
sebagai jaringan propagasi balik (backpropagation), jika pada tahapan pelatihan
menggunakan metode propagasi balik.
Jaringan Propagasi Balik ditemukan pertama kali oleh Rumelhart, et al,
pada Tahun 1988 melalui beberapa penelitian indenpenden (Fauset 1994).
Propagasi balik merupakan algoritma pembelajaran yang terawasi (supervised
learning). Algoritma ini menggunakan erroroutput untuk mengubah nilai
bobot-bobotnya dalam arah mundur (backward). Propagasi balik (ke lapisan masukan)
terjadi setelah jaringan menghasilkan keluaran yang mengandung error. Pada fase
ini seluruh bobot sinapsis (yang tidak memiliki aktivasi nol) dalam jaringan akan
disesuaikan untuk mengkoreksi error yang terjadi (error correction rule). Untuk
pelatihan jaringan, pasangan fase propagasi ke depan dan balik dilakukan secara
berulang untuk satu set data latihan, kemudian diulangi untuk sejumlah epoch
[image:31.595.119.449.500.715.2]sampai didapatkan error terkecil atau nol.
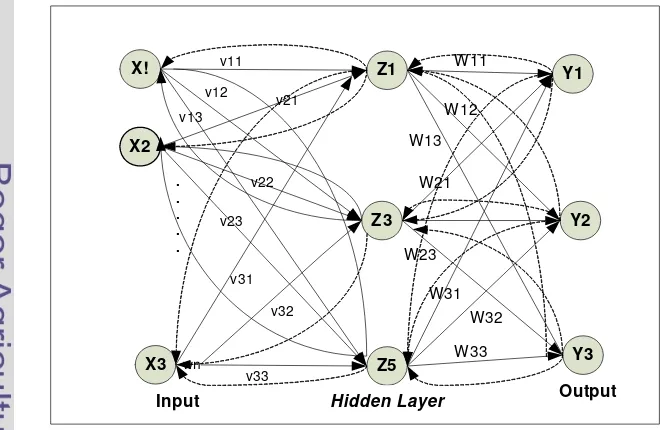
Gambar 8 Arsitektur Jaringan Syaraf Tiruan Propagasi Balik.
X! X2 X3 . . . . . Z1 Z3 Z5 Y2 wn
Input Hidden Layer Output
Gambar 8 memperlihatkan arsitektur propagasi balik dengan sebuah
lapisan tersembunyi (Fauset 1994). Bias pada lapisan keluaran dinyatakan sebagai
wok dan bias pada lapisan tersembunyi dinyatakan sebagai voj. Bias-bias ini
berfungsi seperti bobot, yang selalu bernilai +1. Pada lapisan keluaran, nilai bobot
dinyatakan sebagai wjk sedangkan nilai bobot lapisan masukan dinyatakan sebagai
vij.
Fungsi Aktivasi
Menurut Fauset, fungsi aktivasi yang digunakan sebaiknya memiliki nilai
kontinu, differentiable, dan tidak turun secara monotik (monotically
non-decreasing). Fungsi aktivasi yang digunakan dalam JST dan dilatih dengan
propagasi balik berupa fungsi Sigmoid biner ataupun Sigmoid Bipolar. Pada
fungsi sigmoid biner memiliki cakupan nilai 0 sampai dengan 1. Oleh karena itu,
fungsi ini digunakan untuk jaringan syaraf yang membutuhkan nilai keluaran yang
terletak pada interval 0 sampai dengan 1. Namun dapat juga digunakan untuk
keluaran yang bernilai 0 atau 1. Persamaan 14 dan persamaan 15 merupakan
persamaan untuk fungsi sigmoid biner, (Fauset 1994) :
...(14)
[image:32.595.95.512.186.802.2]...(15)
Gambar 9 memperlihatkan fungsi aktivasi sigmoid biner dengan range [0,1]
Gambar 9 Fungsi aktivasi sigmoid biner dengan range (0,1).
Algoritma Pelatihan
Dalam algoritma propagasi balik menggunakan dua tahapan yaitu: tahapan
perhitungan maju (feedforward) untuk menghitung error antara keluaran aktual
(backward) yang mempropagasikan balik error tersebut dan memperbaiki
bobot-bobot sinapsis pada semua neuron yang ada. Berikut adalah algoritma propagasi
balik, (Fauset 1994):
Langkah 0. Inisialisasi bobot (bangkitkan nilai random yang cukup kecil).
Langkah 1. Kerjakan langkah 2 – 9, selama kondisi berhenti bernilai
FALSE.
Langkah 2. Kerjakan langkah 3 – 8, Untuk setiap pasangan elemen
pelatihan.
Perhitungan maju:
Langkah 3. Setiap unit masukan (Xi, i = 1,2,3,.., n) menerima sinyal
masukan xi dan menyebarkan sinyal tersebut ke seluruh unit
pada lapisan tersembunyi.
Langkah 4. - Setiap unit tersembunyi (Zj, j = 1,2,..., p) menjumlahkan
setiap sinyal yang memiliki bobot berikut:
_ ∑ ... (16)
- Gunakan fungsi aktivasi untuk menghitung sinyal
keluaran:
,...(17)
dan mengirimkan sinyal ini ke seluruh unit pada lapisan
keluaran.
Langkah 5. - Setiap unit keluaran (Yk, k = 1,..., m) menjumlahkan
sinyal-sinyal masukan terbobot, sebagai berikut:
∑ , ...(18)
dan fungsi aktivasi digunakan untuk menghitung sinyal
keluaran:
_ ...(19)
Penghitungan error (propagasi balik)
Langkah 6. - Setiap unit keluaran (Yk, k = 1,..., m) menerima pola
target yang berhubungan dengan pola pelatihan pada
masukan, hitung informasi error sebagai berikut:
Dengan δk merupakan informasi error untuk bobot wjk
pada unit keluaran Yk . Sementara tkadalah vektor target
keluaran,
- Kemudian hitung koreksi bobot (yang nantinya
digunakan untuk memperbaiki wjk):
∆ ...(21)
Dengan α merupakan laju pembelajaran,
- Kemudian hitung koreksi bias (yang nantinya digunakan
untuk memperbaiki w0k):
∆ ...(22)
dan mengirimkan δk ke neuron dilapisan bawahnya
(lapisan tersembunyi).
Langkah 7. - Setiap neuron pada lapisan tersembunyi (Zj, j = 1 ,..., p)
menjumlahkan masukan deltanya (dari neuron-neuron
yang berada pada lapisan diatasnya, lapisan keluaran):
∑ ...(23)
Kalikan nilai ini dengan fungsi aktivasinya untuk
menghitung informasi error:
_ ...(24)
δj adalah koreksi error untuk vij
- Hitung koreksi bobot (digunakan untuk memperbaiki vij)
∆ ...(25)
- Hitung koreksi bias (digunakan untuk memperbaiki v0j)
∆ ...(26)
Perbaiki semua bobot dan bias:
Langkah 8 - Setiap unit keluaran (Yk, k = 1, ..., m) memperbaiki bias
dan bobotnya (j = 0,1,2,3, ..., p):
∆ ...(27)
- Setiap unit tersembunyi (Zj, j = 1 ,..., p) memperbaiki
bias dan bobotnya (i = 0,1,..., n):
Langkah 9 Uji kondisi berhenti
Satu epoch adalah satu putaran (cycle) untuk keseluruhan langkah pada
tahapan pelatihan. Pada dasarnya dibutuhkan banyak epoch untuk pelatihan
jaringan propagasi balik. Pelatihan dilakukan secara berulang-ulang hingga
jumlah siklus tertentu atau telah mencapai MSE (Mean Square Error) yang
diinginkan.
Kejadian Biner (Binary Events)
Pengukuran kinerja (performance measures) merupakan subset dari
pengukuran verifikasi yang fokus pada hubungan antara prediksi dan pengamatan.
Kejadian biner memiliki empat kemungkinan keluaran seperti diperlihatkan dalam
Tabel 1 (Mason 2003).
Tabel 1 Empat kemungkinan keluaran pada kejadian biner
Prediksi Pengamatan Ya Tidak
Ya Hit (a) False Alarm (b)
Tidak Miss (c) Correct Rejection (d)
Tabel 1 menyajikan hubungan pengamatan dan prediksi dengan empat
kemungkinan keluaran. Hit merupakan nilai yang diperoleh dari hasil pengamatan
terhadap suatu objek benar dan prediksi yang ditentukan bernilai benar. False
Alarm diperoleh jika objek yang diamati bernilai salah namun prediksi bernilai
benar. Miss berkebalikan dengan false alarm, yaitu pengamatan bernilai benar
namun prediksi bernilai salah. Terakhir, correct rejection hasil pengamatan
bernilai salah dan nilai prediksinya juga salah, artinya objek yang salah diprediksi
salah (mengandung nilai kebenaran dan biasanya kebenaran ini tidak digunakan).
Penghitungan kejadian biner yang mempengaruhi prediksi adalah sebagai (Mason
2003) :
Hit rate (Nilai kebenaran prediksi) = ...(39)
False Alarm Rate = ...(41)
METODOLOGI PENELITIAN
Kerangka Penelitian
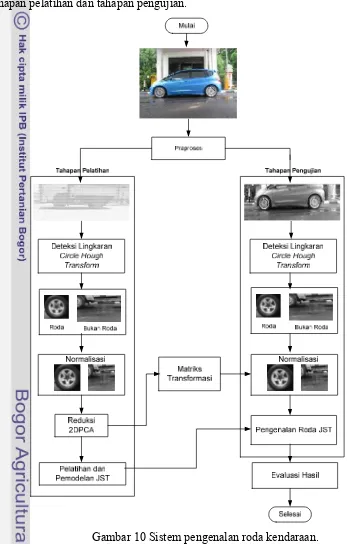
Sistem pengenalan roda kendaraan pada penelitian ini tampak pada
Gambar 10, secara garis besar dapat dibagi menjadi dua tahapan utama yaitu,
tahapan pelatihan dan tahapan pengujian.
[image:37.595.96.443.192.736.2]
Pengumpulan Data Citra
Citra kendaraan yang digunakan dalam penelitian ini berasal dari
kendaraan jenis sedan, SUV, pick up, truk sedang dan truk besar, diambil dari
samping (side view) menggunakan kamera digital dengan dimensi 640 x 480
piksel. Citra diambil pada waktu pagi dan siang hari pada kondisi cerah. Jumlah
citra yang digunakan dalam penelitian ini adalah 225 buah.
Pemrosesan Awal
Pemrosesan awal merupakan proses penyiapan citra kendaraan, citra
kendaraan asli dengan dimensi 640 x 480 piksel diubah ke dalam bentuk citra
abu-abu (gray scale) kemudian dipotong (cropping) pada bagian atas dan bawah
secara horisontal, sehingga citra berukuran lebih kecil dan hanya citra yang
terdapat roda saja yang akan diproses selanjutnya. Hal ini dilakukan untuk
mengurangi waktu pemrosesan dan membuang bagian citra lain yang tidak
dibutuhkan. Pengurangan noise yang muncul pada citra, dilakukan dengan proses
smoothing menggunakan filter average ukuran 5x5 (Gambar 11).
Gambar 11 Filter average ukuran 5x5.
Tahapan Pelatihan
Tahapan pelatihan adalah tahapan untuk melatih sistem menggunakan data latih.
1. Data Latih
Data latih yang digunakan sejumlah 80% dari total citra kendaraan atau
180 citra. Data latih merupakan citra keabuan dengan dimensi 640x200 piksel
karena telah dipotong pada sisi bagian atas dan bawah dan mengalami proses
smoothing dengan average filter.
2. Deteksi Lingkaran dengan CHT
Deteksi lingkaran menggunakan Cycle Hough Transform (CHT), hal ini
Untuk memaksimalkan deteksi lingkaran dengan CHT, maka perlu
dilakukan penentuan parameter-parameter CHT. Tabel 2 memperlihatkan
parameter-parameter CHT yang diujicobakan dalam penelitian ini. Semua
parameter dalam tabel ditentukan dengan cara trial and error. Pemilihan nilai
parameter dilakukan seefektif mungkin, karena menentukan tingkat keberhasilan
dan waktu komputasi.
Tabel 2 Parameter-Parameter CHT
Karakteristik Spesifikasi Keterangan
Radrange Min = 25; 26; 27
Max = 50, 65, 80 dan 100
Menentukan waktu komputasi
Gradient Threshold 10; 11; 12; 13; 14; 15 Default = 10
RadiusFilter LM 10; 20; 30 dan 40 Default = 8 dan minimum = 3
Multirad 1; 0.99; 0.98 Default = 0,5
Radrange menyatakan radius minimum dan maksimum dari lingkaran
yang dicari satuan yang digunakan adalah unit piksel, semakin besar nilai
radrange maka semakin banyak penggunaan memori dan waktu komputasi juga
semakin lama. Gradient threshold digunakan untuk menghilangkan uniform
intensity, nilai-nilai dibawah gradient threshold akan diabaikan. Radius filter
digunakan untuk mencari lokal maksima dalam accumulator array. Multirad
digunakan dalam kasus lingkaran-lingkaran konsentrik, artinya radius multi
dengan satu posisi pusat lingkaran terdeteksi. Multirad memiliki range 0,1 – 1;
dengan 0,1 adalah toleransi tertinggi, artinya lebih banyak nilai radius terdeteksi,
sedangkan nilai 1 merupakan toleransi terendah, hanya radius yang paling
menentukan saja yang akan dipilih.
3. Normalisasi
Hasil dari CHT adalah citra lingkaran memiliki dimensi yang
berbeda-beda, terdiri atas lingkaran roda dan bukan roda yang diklasifikasikan secara
manual. Dimensi lingkaran roda dan bukan roda yang beragam mengharuskan
untuk dilakukannya normalisasi. Normalisasi bertujuan untuk menseragamkan
masukan ke 2DPCA. Dimensi citra lingkaran dalam normalisasi ditentukan
4. Reduksi Fitur dengan 2DPCA
Reduksi fitur dilakukan dengan menggunakan metoda 2DPCA (Two
Dimension Principle Component Analysis). Bagian citra yang direduksi adalah
citra lingkaran yang ditemukan oleh CHT dan telah mengalami normalisasi
sehingga memiliki dimensi 80x80. Reduksi 2DPCA bertujuan mendapatkan set
matriks fitur yang nantinya akan digunakan untuk tahap pemodelan dan pengujian
dengan JST. Keragaman informasi citra lingkaran dalam 2DPCA adalah 99%.
5. Pemodelan dengan Jaringan Syaraf Tiruan
Gambar 12 menunjukkan arsitektur jaringan syaraf tiruan propagasi balik.
Masukan JST berasal dari citra lingkaran yang telah direduksi dengan 2DPCA,
sedangkan target keluaran adalah roda.
Gambar 12 Arsitektur JST Propagasi Balik untuk pengenalan roda kendaraan.
Tabel 3. memperlihatkan parameter-parameter JST propagasi balik yang
dirancang untuk penelitian ini :
Tabel 3. Parameter-Parameter Jaringan Syaraf Tiruan Propagasi Balik.
Karakteristik Spesifikasi
Arsitektur 1 hidden layer
Jumlah neuron masukan Hasil reduksi 2 DPCA
Jumlah neuron keluaran (target) 1 target, yaitu roda
Jumlah neuron hidden 5, 10, 20, 30, 40, 50, 60, 70, 80, 90, 100
Fungsi aktivasi Sigmoid biner (logsig)
Fungsi Pelatihan Trainrp
Laju pembelajaran Default
Minimum toleransi kesalahan 0,000001
Tahapan Pengujian
Tahapan pengujian merupakan tahapan untuk menguji jaringan JST yang
telah dilatih untuk mengenali roda kendaraan, terdiri atas:
1. Data Uji
Untuk pengujian digunakan citra sebanyak 20% dari total citra kendaraan
yang ada, yaitu sebanyak 45 citra uji, sehingga terdapat 90 citra roda yang akan
dikenali oleh JST propagasi balik. Citra uji juga telah mengalami pemrosesan
awal.
2. Deteksi Lingkaran dengan CHT
Proses ini sama dengan pada tahapan sebelumnya. Citra uji dideteksi
dengan CHT untuk mendapatkan lingkaran roda dan bukan roda. Parameter CHT
pada tahapan ini menggunakan nilai-nilai yang telah ditentukan pada tahapan
pelatihan. Lingkaran yang dihasilkan memiliki beragam dimensi. Setelah
lingkaran ditemukan, kemudian dijadikan input pada proses selanjutnya.
3. Normalisasi
Normalisasi citra lingkaran dilakukan untuk menyamakan ukuran
lingkaran yang berhasil dideteksi oleh CHT. Ukuran citra yang dinormalisasi
adalah 80x80, sesuai dengan normalisasi pada tahapan pelatihan.
4. Matriks Transformasi
Matriks Transformasi adalah matriks yang dihasilkan dari proses reduksi
2DPCA dan digunakan untuk mengubah citra lingkaran pada tahapan pengujian.
Matriks transformasi memiliki dimensi yang sama dengan citra tereduksi. Matriks
ini dikirimkan dari tahapan pelatihan sebagai acuan reduksi citra lingkaran pada
tahapan pengujian.
5. Pengujian model
Pada proses pengujian model, menggunakan data hasil pelatihan untuk
mendapatkan klasifikasi yang benar dari data uji. Masukan untuk jaringan syaraf
tiruan propagasi balik adalah citra lingkaran dari data uji yang dinormalisasi dan
telah diproses dengan matriks transformasi berasal dari proses reduksi 2DPCA
pada tahapan pelatihan. Target keluaran JST adalah roda. Tahapan pengujian ini
juga melakukan pengujian dengan data uji yang telah diberi noise dan lingkaran
Evaluasi Hasil
Setelah dilakukan proses pelatihan dan pengujian maka berikutnya akan
dievaluasi hasil meliputi tingkat keberhasilan deteksi lingkaran CHT, tingkat
keberhasilan pengenalan JST, dan tingkat kesalahan dalam pengenalan citra roda
kendaraan, meliputi kesalahan karena roda tidak dikenali (miss) dan kesalahan
objek bukan roda dikenali sebagai roda (false alarm). Penghitungan keberhasilan
pengenalan, miss dan false alarmrate adalah sebagai berikut (Mason 2003) :
%
%
HASIL DAN PEMBAHASAN
Sistem pengenalan roda kendaraan mengunakan citra kendaraan yang
diambil dari samping (side view) sehingga roda akan terlihat berbentuk lingkaran.
Citra kendaraan yang dikumpulkan terdiri atas kendaraan seperti mobil sedan,
SUV, pick-up, truk sedang dan truk besar.
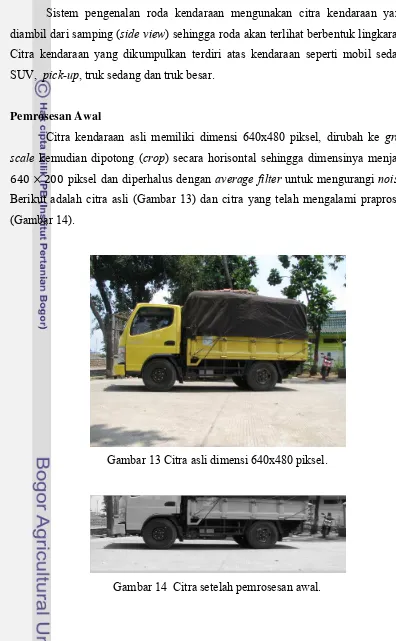
Pemrosesan Awal
Citra kendaraan asli memiliki dimensi 640x480 piksel, dirubah ke gray
scale kemudian dipotong (crop) secara horisontal sehingga dimensinya menjadi
piksel dan diperhalus dengan average filter untuk mengurangi noise.
[image:43.595.75.471.124.765.2]Berikut adalah citra asli (Gambar 13) dan citra yang telah mengalami praproses
(Gambar 14).
Gambar 13 Citra asli dimensi 640x480 piksel.
Gambar 14 Citra setelah pemrosesan awal.
Deteksi Lingkaran dengan CHT
Citra yang telah mengalami praproses akan melalui CHT untuk
mendeteksi lingkaran roda. Kemampuan deteksi lingkaran CHT sangat
menentukan keberhasilan pengenalan dengan JST. Penetapan nilai parameter
dilakukan secara trial and error meliputi: gradient threshold, jangkauan radius
(radrange) terdiri atas nilai minimal dan maksimal, radius filter untuk lokal
maksima (radius to LM) dan radius jamak (multirad). Data latih yang digunakan
dalam penelitian ini adalah sebanyak 180 citra dari kendaraan roda empat,
sehingga CHT harus dapat mendeteksi lingkaran roda sebanyak 360 citra.
Penentuan nilai parameter CHT dalam penelitian ini berdasarkan citra
yang diamati, dengan memperhatikan waktu komputasi dan ketepatan deteksi.
Nilai radius filter untuk local maxima sebaiknya besar, parameter ini digunakan
untuk mencari lokal maksima dalam accumulator array. Gambar 15
memperlihatkan nilai parameter Radius Filter LM terhadap jumlah lingkaran roda
yang berhasil dideteksi.
Gambar 15 Nilai optimum parameter RadiusFilter LM.
Jumlah lingkaran roda terbanyak terdapat pada nilai 30 yaitu sebanyak 358
lingkaran atau 99,4% dari target deteksi, oleh karena itu parameter Radius Filter
LM pada nilai tersebut akan di eksplorasi lebih lanjut, sedangkan nilai-nilai yang
lain tidak digunakan.
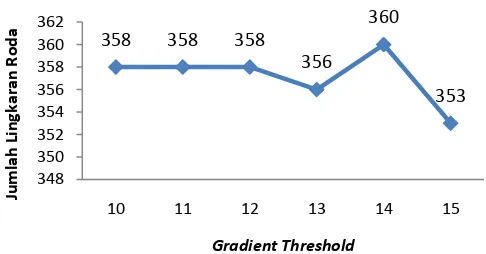
Gambar 16 memperlihatkan nilai parameter Gradient Threshold. Jumlah
lingkaran roda terbanyak terdapat pada nilai 16, yaitu sebanyak 360 lingkaran atau
seluruh lingkaran roda berhasil dideteksi.
321
343
358
340
300 310 320 330 340 350 360 370
10 20 30 40
Jumlah
Lingkaran
Roda
Gambar 16 Nilai optimum parameter Gradient Threshold.
Penggunaan nilai parameter multirad dengan toleransi terkecil, yaitu 1
(satu), meminimalkan lingkaran–lingkaran kosentrik terdeteksi, artinya hanya
lingkaran yang prinsipal dengan titik pusat saja yang akan dideteksi. Gambar 17
memperlihatkan deteksi lingkaran dengan nilai parameter multirad yang berbeda.
Gambar 17 Deteksi lingkaran dengan nilai parameter multirad berbeda.
Penggunaan nilai minimal (25, 26, 27) dan nilai maksimal (50, 65, 80,
100) pada parameter radrange yang semakin besar, menyebabkan waktu
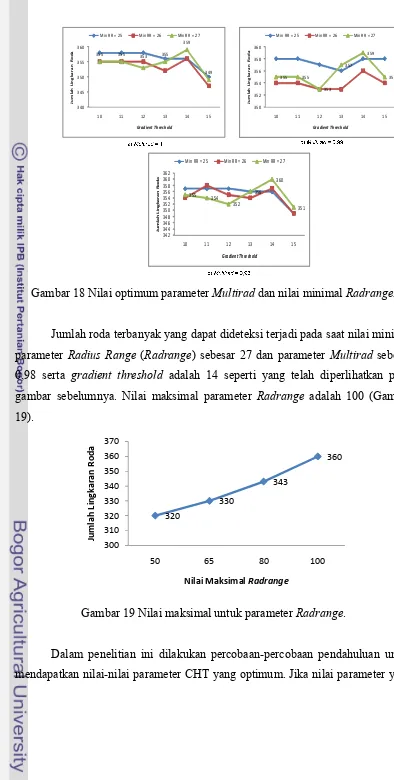
komputasi yang diperlukan semakin lama (Lampiran 1). Gambar 18 menunjukkan
nilai minimal parameter Radrange pada beberapa nilai gradient threshold dan
nilai parameter multirad.
358 358 358
356 360
353
348 350 352 354 356 358 360 362
10 11 12 13 14 15
Jumlah
Lingkaran
Ro
d
a
[image:45.595.181.424.85.212.2]355 355 353 355 359 349 340 345 350 355 360
10 11 12 13 14 15
Ju m la h Li n g k a r a n Ro d a
Gradient Threshold
Min RR = 25 Min RR = 26 Min RR = 27
355 355 353 357 359 355 350 352 354 356 358 360
10 11 12 13 14 15
Ju m la h Li n g k a r a n Ro d a
Gradient Threshold
Min RR = 25 Min RR = 26 Min RR = 27
355 354 352 356 360 351 342 344 346 348 350 352 354 356 358 360 362
10 11 12 13 14 15
Ju m la h Li n g k a r a n Ro d a
Gradient Threshold
Min RR = 25 Min RR = 26 Min RR = 27
[image:46.595.98.492.61.842.2]
Gambar 18 Nilai optimum parameter Multirad dan nilai minimal Radrange.
Jumlah roda terbanyak yang dapat dideteksi terjadi pada saat nilai minimal
parameter Radius Range (Radrange) sebesar 27 dan parameter Multirad sebesar
0,98 serta gradient threshold adalah 14 seperti yang telah diperlihatkan pada
gambar sebelumnya. Nilai maksimal parameter Radrange adalah 100 (Gambar
19).
Gambar 19 Nilai maksimal untuk parameter Radrange.
Dalam penelitian ini dilakukan percobaan-percobaan pendahuluan untuk
mendapatkan nilai-nilai parameter CHT yang optimum. Jika nilai parameter yang
320 330 343 360 300 310 320 330 340 350 360 370
50 65 80 100
Jumlah
Lingkaran
Roda
[image:46.595.130.501.83.337.2]ditentukan tidak dapat memberikan hasil yang diinginkan, maka untuk nilai
tersebut tidak dieksplorasi lebih lanjut, seperti parameter Radius Filter LM yaitu
nilai 10, 20 dan 40 (Gambar 15) serta nilai maksimal untuk parameter Radrange
yaitu nilai 50, 65 dan 80 (Gambar 19) tidak digunakan lagi. Nilai optimum untuk
setiap parameter-parameter CHT yang dipergunakan dalam penelitian ini
[image:47.595.78.478.75.811.2]disajikan dalam Tabel 4.
Tabel 4 Nilai optimum untuk parameter-parameter CHT
Parameter Nilai
Radius Filter LM 30
Gradient Threshold 14
Radius Range Min = 27 dan Max = 100
Multirad 0,98
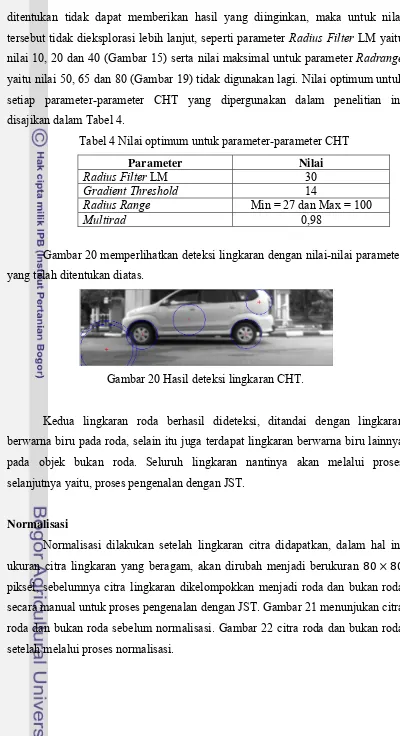
Gambar 20 memperlihatkan deteksi lingkaran dengan nilai-nilai parameter
yang telah ditentukan diatas.
Gambar 20 Hasil deteksi lingkaran CHT.
Kedua lingkaran roda berhasil dideteksi, ditandai dengan lingkaran
berwarna biru pada roda, selain itu juga terdapat lingkaran berwarna biru lainnya
pada objek bukan roda. Seluruh lingkaran nantinya akan melalui proses
selanjutnya yaitu, proses pengenalan dengan JST.
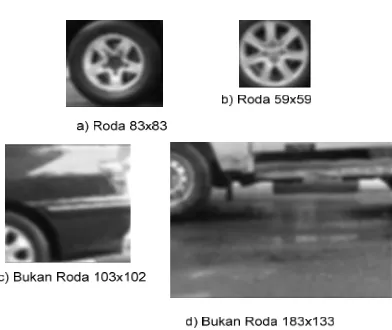
Normalisasi
Normalisasi dilakukan setelah lingkaran citra didapatkan, dalam hal ini
ukuran citra lingkaran yang beragam, akan dirubah menjadi berukuran 8 8
piksel, sebelumnya citra lingkaran dikelompokkan menjadi roda dan bukan roda
secara manual untuk proses pengenalan dengan JST. Gambar 21 menunjukan citra
roda dan bukan roda sebelum normalisasi. Gambar 22 citra roda dan bukan roda
Gambar 21 Citra roda dan bukan roda sebelum normalisasi.
Gambar 22 Citra roda dan bukan roda setelah normalisasi.
Reduksi 2DPCA
Reduksi citra roda dan bukan roda dilakukan dengan 2DPCA yang
memiliki kesamaan informasi sebesar 99%. Masukan untuk 2DPCA adalah citra
roda dan bukan roda berdimensi 8 8 piksel dari proses sebelumnya yaitu,
proses normalisasi. Proses 2DPCA menghasilkan citra tereduksi dan matriks
transformasi berdimensi 8 , artinya dibutuhkan 11 akar ciri untuk
mendapatkan kesamaan informasi 99%, sehingga masukan ke JST adalah sebesar
880 neuron (Lampiran 2).
Pengenalan dengan JST Propagasi Balik
Pengenalan roda kendaraan dilakukan dengan JST propagasi balik melalui
tahapan pelatihan dan tahapan pengujian. Tahapan pelatihan merupakan tahapan
[image:48.595.246.375.295.416.2]Pelatihan JST Propagasi Balik dilakukan menggunakan Data Latih dengan
memvariasikan jumlah neuron pada hidden layer yaitu, 5, 10, 20, 30, 40, 50, 60,
70, 80, 90, dan 100 (Lampiran 3).
Tahapan pengujian juga mengalami beberapa proses yang sama dengan
proses pada tahapan pelatihan yaitu, sebelum pengujian dengan JST terlebih
dahulu data yang akan diujicobakan diproses dulu dengan CHT, kemudian
lingkaran yang berhasil dideteksi dinormalisasi ke dalam citra berukuran 80x80
piksel, dan ditransformasikan dengan matriks transformasi yang didapatkan dari
reduksi 2DPCA pada tahapan pelatihan. Penghitungan prosentasi keberhasilan
dilakukan pada pengujian Data Uji. Data Uji yang digunakan adalah sebanyak 45
citra kendaraan roda empat, sehingga kinerja JST terbaik adalah mampu
mengenali sebanyak 90 roda.
Roda yang berhasil dikenali oleh JST, ditandai dengan lingkaran berwarna
merah (Gambar 23), sedangkan untuk objek bukan roda ditandai dengan lingkaran
berwarna biru.
Gambar 23 Lingkaran berwarna merah tanda roda dikenali oleh JST.
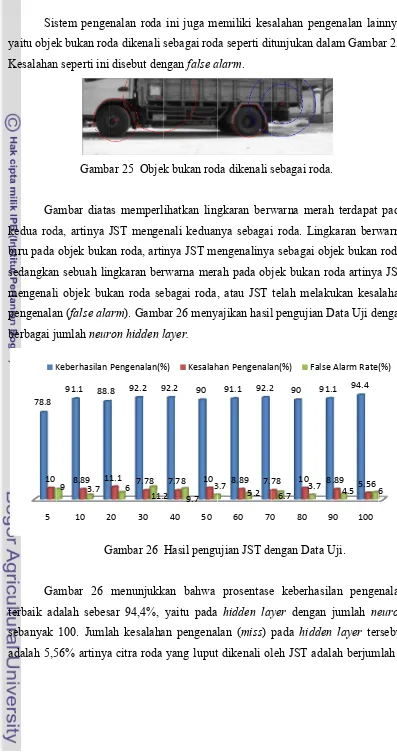
Hasil pengujian juga menunjukkan adanya kesalahan pengenalan. Gambar
24 memperlihatkan kesalahan JST dalam mengenali roda,citra roda pada gambar
tersebut memiliki lingkaran yang berbeda warna, yaitu lingkaran berwarna merah
dan lingkaran berwarna biru. Lingkaran berwarna merah menyatakan bahwa JST
mengenali roda, sedangkan citra roda yang satu lagi tidak dikenali JST (lingkaran
berwarna biru).Kesalahan seperti ini disebut dengan miss, yaitu JST luput dalam
mengenali sebuah atau kedua lingkaran roda.
Sis yaitu obje Kesalahan Ga kedua rod biru pada sedangkan mengenali pengenala berbagai ju Ga terbaik ad sebanyak adalah 5,5 5 78.8 10 K stem penge
k bukan rod
n seperti ini
Gamba
ambar diata
da, artinya J
objek buka
n sebuah lin
i objek buk
an (false ala
umlah neur
[image:50.595.105.502.90.842.2]G ambar 26 dalah sebes 100. Jumla 56% artinya 10 2 91.1 88. 8.89 1 9 3.7 Keberhasilan nalan roda da dikenali disebut den
ar 25 Objek
as memperl
JST menge
an roda, arti
ngkaran ber
kan roda se
arm). Gamb
ron hidden l
Gambar 26
menunjukk
sar 94,4%,
ah kesalaha
a citra roda
20 30
8 92.2 9
1.1 7.78 6
11. Pengenalan(%
ini juga m
sebagai rod
ngan false a
k bukan rod
ihatkan ling
nali keduan
inya JST me
rwarna mer
ebagai roda,
ar 26 meny
layer. Hasil pengu kan bahwa yaitu pada an pengenal yang luput 40 50 92.2 90 7.78 10 2 9.7 3 %) Kesalah memiliki kes
da seperti dit
alarm.
da dikenali s
gkaran berw
nya sebagai
engenalinya
ah pada obj
, atau JST
yajikan hasil
ujian JST de
prosentase
hidden lay
lan (miss)
t dikenali ol
60 70
91.1 92.2
8.89 7.7 3.7
5.2 han Pengenala
salahan pen
tunjukan da
sebagai rod
warna mera
i roda. Ling
a sebagai ob
jek bukan r
telah melak
l pengujian
engan Data
e keberhasi
yer dengan
pada hidde
leh JST ada
0 80
2 90 9
78 10 6.7 3.7 an(%) Fals ngenalan lai alam Gamba da. ah terdapat gkaran berw bjek bukan roda artinya kukan kesa
Data Uji de
Uji.
ilan penge
n jumlah ne
en layer ter
alah berjum
90 100 1.1 94.4
8.89 5.56 4.5 se Alarm Rate(
citra dari 90 citra roda. Jumlah false alarm rate adalah 6% atau citra bukan roda
yang dikenali sebagai roda oleh JST berjumlah 8 citra. Citra bukan roda yang
dikenali sebagai bukan roda berjumlah 125 citra (Lampiran 4). Kemampuan JST
dalam mengenali Data Uji sebenarnya sudah cukup baik (94,4%). Kesalahan
pengenalan (miss) disebabkan karena kemampuan JST dalam generalisir masukan
untuk Data Uji dengan Data Latih yang digunakan dalam proses pelatihan JST.
Penelitian ini melakukan pengujian terhadap kendaraan yang memiliki
lebih dari empat roda, seperti diperlihatkan dalam Gambar 27. Ketiga roda dapat
dideteksi oleh CHT, namun hanya dua roda yang dikenali oleh JST.
Gambar 27 Pengujian kendaraan tiga gandar.
Pengujian dengan Data Uji yang diberi noise berupa gaussian noise dan
citra yang diberi lingkaran palsu diantara roda. Pengujian dilakukan dengan
jumlah neuron sebanyak 100 pada hidden layer. Gambar 28 menunjukkan citra
[image:51.595.140.409.517.686.2]yang diberi variasi gaussian noise.
Gamb Pe dan tanpa menunjuk penurunan kemampua signifikan sebesar 0,
(dengan t
kinerja J
penambah
digunakan
sebelumny
noise sebe
ataupun d
noise sepe
bar 29 Hasi
ngujian Dat
a filter dipe
kkan bahwa
n prosentase
an deteksi C
n pada detek
,02 mengala
tambahan f
ST walaup
han filter, m
n tidak da
ya (citra tan
esar 0,5 ter
dengan tamb
erti itu, suda
Gambar 0 20 40 60 80 100 Keberhasilan Pengenalan (%) il pengujian
ta Uji yang
erlihatkan d
apabila nila
e pengenala
CHT. Pemb
ksi CHT. K
ami penuru
filter). Pen
pun tidak
masih terdap
apat sepen
npa noise).
rlihat JST ti
bahan filter
ah sulit dide
r 30 Citra de
0,02 83.3
6 88.8
T
n Data Noise
diberi nois
dalam Gam
ai gaussian
an. Prosent
berian noise
Kinerja dete
unan sebesa
nggunaan g
terlalu be
pat kesalaha
nuhnya me
Pengujian
idak dapat
r (Lampiran
eteksi dan d
engan Varia
0,05 0
63.3 66
71.1
Gauss
Tanpa Filter
e pada neur
se dengan ta
mbar 29. H
noise sema
tase pengen
e pada Data
eksi CHT p
ar 7% (tanp
gaussian fi
esar. Pengu
an, hal ini k
engembalik
Data Nois
mengenali
n 5). Hal in
dikenali (Ga ans Gaussia 0,08 0, 6.6 52.2 70 5
sian Noise
r Filter
ron hidden l
ambahan ga
Hasil penguj
akin diperbe
nalan JST d
a Uji memb
ada varians
a filter) dan
filter mamp
ujian data
karena gau
kan citra
se dengan v
roda (0%)
ni disebabk
ambar 30).
an Noise = 0
1 0,5
0 56.6
0
layer = 100.
aussian filte
jian Data N
esar maka te
dipengaruhi
berikan peng
s gaussian
n sebesar 3
pu memper
Noise de
ssian filter
noise ke
varians gau
baik tanpa
kan citra de
0,5.
0
.
er 5x5
diber sebag deng gamb JST m hidde Gambar ri lingkaran
gai roda, ha
gan lingkara
bar 31b) be
mengenalin
Gamb
Gambar
en layer ber
Pro Lingk Terde 8
31 mempe
n palsu. G
al ini karena
an roda, seh
entuk lingka
nya sebagai
bar 31 Hasil
32 menyaj
rjumlah 100
Gambar 32
osentase karan Palsu eteksi (CHT)
L T 0
erlihatkan h
Gambar 31a
a bentuk lin
ingga JST m
aran hampir
objek buka
a) Lingkaran
b) Lingkaran pa
Pengenalan
ikan hasil p
0.
2 Hasil peng
Prosentase Lingkaran Palsu Tidak Terdeteks
(CHT) 20 hasil penge a) menunju ngkaran pal mengenalin
r sama tetap
an roda.
palsu dikenali sebaga
alsu tidak dikenali seba
n Data Uji d
pengujian d
gujian Data
u si
Prosenta Dikenali seb
Roda (JS 51
enalan JST
ukkan lingk
lsu dan back
nya sebagai
pi backgrou
ai roda .
agai roda. dengan ling data lingkar Lingkaran P ase bagai ST) Prosent Dikena Rod 36 pada Data karan palsu
kground ha
roda. Berbe
und berbed
karan palsu
an palsu pa
Palsu.
tase Tidak li Sebagai a (JST)
a Uji yang
u dikenali
ampir sama
eda dengan
da sehingga
u.
Gambar 32 menunjukkan kemampuan CHT mendeteksi keberadaan
lingkaran palsu dibagian tengah roda, yaitu mencapai 80%, sedangkan lingkaran
palsu tidak terdeteksi oleh CHT mencapai 20%. Penurunan kemampuan deteksi
CHT disebabkan karena lingkaran palsu yang digunakan merupakan lingkaran
tambahan yang diberikan dengan memanfaatkan aplikasi photoshop, sehingga
background citra dan lingkaran palsu tidak menyatu secara alami.
Pengenalan lingkaran palsu sebagai roda oleh JST sebesar 51,1% adalah
lebih tinggi dibandingkan lingkaran palsu dikenali sebagai bukan roda (28,8%),
artinya jika lingkaran palsu memiliki bentuk yang sama serta background dalam
lingkaran palsu seperti bentuk lingkaran roda asli, maka JST akan mengenalinya
SIMPULAN DAN SARAN
Simpulan
Simpulan dari hasil penelitian pengenalan roda kendaraan dengan
menggunakan Circle Hough Transform, 2DPCA dan Jaringan Syaraf Tiruan
Propagasi Balik adalah sebagai berikut:
1. Model pengenalan roda yang dibuat menggunakan citra utuh kendaraan
roda empat yang diambil dari samping dengan tingkat keberhasilan
pengenalan Data Uji dengan JST Propagasi Balik adalah sebesar 94,4%
pada neuron hidden layer berjumlah 100, dan terendah 78,8% pada neuron
hidden layer berjumlah 5.
2. Tingkat Keberhasilan deteksi lingkaran roda dengan CHT mencapai 100%
dengan menggunakan parameter Gradient Threshold adalah14, parameter
Radrange minimal adalah 27 dan maksimal adalah 100, parameter Radius
Filter LM adalah 30, dan parameter Multirad adalah 0,98.
3. Pengujian data yang diberi noise memperlihatkan adanya penurunan
kinerja JST, hal ini menunjukkan bahwa pemberian noise memberikan
pengaruh signifikan terhadap deteksi lingkaran CHT dan akhirnya
mempengaruhi pengenalan oleh JST. Pengujian Data Uji yang diberi
lingkaran palsu memperlihatkan, jika lingkaran palsu memiliki bentuk
yang sama serta background dalam lingkaran palsu seperti bentuk
lingkaran roda asli, maka JST akan mengenalinya sebagai roda.
Saran
Deteksi lingkaran dengan metode CHT lainnya seperti penggunaan second
derivative order dapat diujicobakan untuk mengurangi lingkaran-lingkaran objek
bukan roda. Penggunaan arsitektur JST Propagasi Balik dengan dua hidden layer
atau pelatihan jaringan dengan metode lainnya juga dapat diujicobakan untuk
meningkatkan prosentase pengenalan.
Pengenalan roda kendaraan dalam penelitian ini dapat dikembangkan lebih
lanjut untuk pengenalan jenis kendaraan berdasarkan jarak antar roda kendaraan
DAFTAR PUSTAKA
Argialas DP, and Mavrantza OD. 2004. Comparison of Edge Detection and
Hough Transform Techniques for the Extraction of Geologic Features. The
International Archives of the Photogrammetry, Remote Sensing and
Spatial Information Sciences, Vol. 34, Part XXX.
Buono, Agus dan Irwansyah. 2009. Pengenalan Kadar Total Padat Terlarut Pada Buah Belimbing Manis Berdasar Citra Red-Green-Blue dengan Analisis Komponen Utama Sebagai Ekstrasi Ciri dan Jarak Euclidean sebagai
Pengenal Pola. Jurnal Ilmu Komputer dan Informasi, Volume 2, Nomor 1.
Duda, R and P.E. Hart. 1972. Use of the Hough Transform to Detect Curves and
lines in Pictures. Communication of the Association for Computing
Machinery, 15(1): 11-15.
Fausett. Laurent. 1994. Fundamental of Neural Network Architecture, Algorithms, and Applications. Prentice Hall. New Jersey.
Gonzales RC, Woods RE, Eddins SL. 2004. Digital Image Processing Using Matlab. Pearson Prentice Hall. New Jersey.
Haykin, Simon. Neural Networks (A Comprehensive Foundation). Macmillan College Publishing Company. New York.
Mason, Ian. 2003. Binary Events. Forecast Verification: A Practitioner’s Guide in Atmospheric Science. John Wiley & Son. UK.
Ofer Achler and Mohan M. Trivedi. 2003. Camera Based Vehicle Detection, Tracking, and Wheel Baseline Estimation Approach.
___________________,. 2004. Vehicle Wheel Detector Using 2D Filter Banks.
IEEE Intelligent Vehicles Symposium. Italy.
Qur’ania, Arie. 2012. Identifikasi Freycinetia (Pandaceae) Berbasis Citra Anatomi Stomata Menggunakan K-Nearest Neighbor dan Jaringan Syaraf Tiruan. [Tesis]. Bogor: Departemen Ilmu Komputer, FMIPA. Institut Pertanian Bogor.
Yang et al. 2004. Two-Dimensional PCA: A New Approach to Appearance-Based
Face Representation and Recognition. IEEE transactions on Pattern
Analysis and Machine Intelligence, Vol 26, Nomor 1.
Yu-fai Fung, et al. Image Processing Application in Toll Collection. IAENG
DAFTAR PUSTAKA
Argialas DP, and Mavrantza OD. 2004. Comparison of Edge Detection and
Hough Transform Techniques for the Extraction of Geologic Features. The
International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Vol. 34, Part XXX.
Buono, Agus dan Irwansyah. 2009. Pengenalan Kadar Total Padat Terlarut Pada Buah Belimbing Manis Berdasar Citra Red-Green-Blue dengan Analisis Komponen Utama Sebagai Ekstrasi Ciri dan Jarak Euclidean sebagai
Pengenal Pola. Jurnal Ilmu Komputer dan Informasi, Volume 2, Nomor 1.
Duda, R and P.E. Hart. 1972. Use of the Hough Transform to Detect Curves and
lines in Pictures. Communication of the Association for Computing
Machinery, 15(1): 11-15.
Fausett. Laurent. 1994. Fundamental of Neural Network Architecture, Algorithms, and Applications. Prentice Hall. New Jersey.
Gonzales RC, Woods RE, Eddins SL. 2004. Digital Image Processing Using Matlab. Pearson Prentice Hall. New Jersey.
Haykin, Simon. Neural Networks (A Comprehensive Foundation). Macmillan College Publishing Company. New York.
Mason, Ian. 2003. Binary Events. Forecast Verification: A Practitioner’s Guide in Atmospheric Science. John Wiley & Son. UK.
Ofer Achler and Mohan M. Trivedi. 2003. Camera Based Vehicle Detection, Tracking, and Wheel Baseline Estimation Approach.
___________________,. 2004. Vehicle Wheel Detector Using 2D Filter Banks.
IEEE Intelligent Vehicles Symposium. Italy.
Qur’ania, Arie. 2012. Identifikasi Freycinetia (Pandaceae) Berbasis Citra Anatomi Stomata Menggunakan K-Nearest Neighbor dan Jaringan Syaraf Tiruan. [Tesis]. Bogor: Departemen Ilmu Komputer, FMIPA. Institut Pertanian Bogor.
Yang et al. 2004. Two-Dimensional PCA: A New Approach to Appearance-Based
Face Representation and Recognition. IEEE transactions on Pattern
Analysis and Machine Intelligence, Vol 26, Nomor 1.
Yu-fai Fung, et al. Image Processing Application in Toll Collection. IAENG
36
Lampiran 1 Hasil Deteksi Lingkaran CHT untuk Data Latih RadRange Gradient Threshold Radius Filter LM
Multirad Time Jumlah Lingkaran Roda Jumlah Lingkaran Bukan Roda Min Max
25 50 10 10 1 5:13 320 680
25 65 10 10 1 5:45 330 665
25 80 10 10 1 6:24 343 513
25 100 10 10 1 8:04 321 274
25 100 10 20 1 8:57 343 147
25 100 10 30 1 10:44 358 129
26 100 10 30 1 10:55 355 145
27 100 10 30 1 10:34 355 158
25 100 10 30 0,99 10:17 358 131
26 100 10 30 0,99 10:05 354 156
27 100 10 30 0,99 10:09 355 158
25 100 10 30 0,98 10:54 357 142
26 100 10 30 0,98 10
![Gambar 9 memperlihatkan fungsi aktivasi sigmoid biner dengan range [0,1]](https://thumb-ap.123doks.com/thumbv2/123dok/932032.391567/32.595.95.512.186.802/gambar-memperlihatkan-fungsi-aktivasi-sigmoid-biner-range.webp)