PERANCANGAN DAN IMPLEMENTASI ALGORITMA
PURWARUPA ROBOT PEMBANTU
PENYANDANG TUNADAKSA
(DU99RWS4-V12)
SKRIPSI
Diajukan untuk Menempuh Ujian Akhir Sarjana Program Studi S1 Teknik Informatika
Fakultas Teknik dan Ilmu Komputer Universitas Komputer Indonesia
ANTON ADE PURNAMA
10109467
PROGRAM STUDI TEKNIK INFORMATIKA
FAKULTAS TEKNIK DAN ILMU KOMPUTER
DAFTAR ISI
LEMBAR JUDUL
LEMBAR PENGESAHAN
ABSTRAK ... i
ABSTRACT ... ii
KATA PENGANTAR ... iii
DAFTAR ISI ... v
DAFTAR GAMBAR ... ix
DAFTAR TABEL... xiii
DAFTAR SIMBOL ... xiv
DAFTAR LAMPIRAN ... xvi
BAB 1 PENDAHULUAN ... 1
1.1 Latar Belakang Masalah ... 1
1.2 Identifikasi Masalah ... 2
1.3 Maksud dan Tujuan ... 2
1.4 Batasan Masalah... 3
1.5 Metodologi Penelitian ... 4
1.6 Sistematika Penulisan... 6
BAB 2 TINJAUAN PUSTAKA ... 9
2.1 Kecerdasan Buatan ... 9
2.1.1 Pengertian Kecerdasan Buatan ... 9
2.1.2 Kelebihan Kecerdasan Buatan ... 10
2.1.3 Ruang Lingkup Kecerdasan Buatan ... 11
2.1.4 Representasi Pengetahuan... 12
2.2 Perangkat Keras ... 18
2.2.1 Sistem Kemudi MobileRobot ... 18
2.2.2 Mikrokontroler ... 23
2.2.3 Aktuator ... 25
2.2.4 Sensor... 26
2.2.3.2 Sensor Jarak ... 28
BAB 3 ANALISIS DAN PERANCANGAN ... 37
3.1 Analisis Masalah ... 37
3.2 Perancangan Perangkat Keras ... 43
3.2.1 Sistem Kemudi Robot ... 43
3.2.2 Diagram Blok Sistem Kendali ... 45
3.2.3 Mikrokontroler Bs2P40 ... 46
3.2.4 Mikrokontroler Atmega8 ... 48
3.2.5 Sensor Jarak ... 48
3.2.6 Pencapit (Gripper) ... 50
3.3 Lingkungan Kerja (Task Environment) ... 51
3.4 Representasi Pengetahuan Robot ... 51
3.5 Perancangan Algoritma Gerak Dasar ... 54
3.5.1 Algoritma Gerak Lurus ... 54
3.5.2 Algoritma Gerak Lurus 90 ... 55
3.5.3 Algoritma Gerak Lurus Belok Maju ... 56
3.5.4 Algoritma Gerak Lurus Belok Mundur ... 58
3.5.5 Algoritma Gerak ke Kanan Belok ... 59
3.5.6 Algoritma Gerak ke Kiri Belok ... 61
3.5.7 Algoritma Gerak Berputar ... 62
3.5.8 Perancangan Algoritma Utama ... 64
3.6 Prosedur Cek Posisi... 64
3.6.1 Prosedur Mengarah ke Rak Posisi 1 ... 68
3.6.2 Prosedur Mengarah ke Rak Posisi 2 ... 70
3.6.4 Prosedur Ambil Piring ... 72
3.6.5 Prosedur Mundur ke Meja ... 72
3.6.6 Prosedur Simpan Piring ... 73
3.6.7 Prosedur Kembali ke Home ... 74
3.6.8 Prosedur Menuju ke Meja... 75
3.6.9 Prosedur Menuju Tempat Cuci Piring ... 76
3.6.10 Prosedur Pulang ke Home... 78
3.7 Analisis Spesifikasi Kebutuhan Perangkat Lunak ... 81
3.8 Analisis Kebutuhan Non Fungsional ... 83
3.8.1 Analisis Perangkat Keras ... 83
3.8.2 Analisis Perangkat Lunak ... 84
3.8.3 Analisis Pengguna ... 84
3.9 Analisis Kebutuhan Fungsional ... 84
3.9.1 Diagram Konteks ... 84
3.9.2 Data Flow Diagram (DFD) ... 85
3.9.3 Kamus data ... 86
3.9.4 Spesifikasi Proses ... 87
3.10 Perancangan Aplikasi Simulasi ... 89
3.10.1 Perancangan Struktur Menu ... 89
3.10.2 Perancangan Antarmuka Simulasi Robot Pembantu Penyandang Tunadaksa ... 90
3.10.3 Perancangan Tampilan Pesan ... 97
3.10.4 Jaringan Semantik ... 101
BAB 4 IMPLEMENTASI DAN PENGUJIAN ... 103
4.1 Implementasi Sistem Simulasi... 103
4.2 Implementasi Antarmuka Simulasi ... 104
4.3 Implementasi Aplikasi Simulasi ... 108
4.3.1 Rencana Pengujian Aplikasi Simulasi ... 108
4.4 Implementasi Purwarupa Robot ... 110
4.4.1 Implementasi Sistem Kemudi Robot ... 110
4.4.2 Implementasi Sistem Pencapit (Gripper) ... 111
4.4.3 Implementasi Penempatan Sensor Ultrasonik ... 112
4.5 Pengujian Purwarupa Robot ... 113
4.5.1 Pengujian Sensor Jarak ... 113
4.3.2 Pengujian Algoritma Gerak dasar... 114
4.3.3 Pengujian Algoritma Keseluruhan... 117
BAB V KESIMPULAN DAN SARAN ... 121
5.1 Kesimpulan ... 121
5.2 Saran ... 121
KATA PENGANTAR
Syukur Alhamdulillah penulis panjatkan kehadirat Allah Subhanahu
Wata’ala yang telah memberikan kesehatan dan petunjuk sehingga dapat menyelesaikan karya ilmiah yang berjudul “Perancangan dan Implementasi Algoritma Purwarupa Robot Pembantu Penyandang Tunadaksa (DU99RWS4-V12)”. Tugas Akhir ini disusun untuk memenuhi syarat kelulusan program sarjana.
Penulis menyadari bahwa karya ilmiah ini masih banyak kekurangan, dikarenakan keterbasatan penulis, baik dalam penyajian materi dan sistematika penulisan, pengetahuan dan pengalaman penulis. Oleh karena itu, kritik dan saran yang membangun sangat penulis harapkan.
Dalam kesempatan ini penulis ingin menyampaikan rasa hormat dan terima kasih yang sebesar-besarnya kepada:
1. Kedua orang tua dari penulis sekaligus orang pertama yang menjadi pembimbing bagi Penulis.
2. Bapak Dr. Ir. Eddy Suryanto Soegoto selaku Rektor Universitas Komputer Indonesia.
3. Ibu Prof. Dr.Umi Narimawati, Dra., SE., M.Sc., selaku Wakil Rektor I Bidang Akademik Universitas Komputer Indonesia..
5. Bapak Prof. Dr. Ir. Denny Kurniadie, M.Sc., selaku Dekan Fakultas Teknik dan Ilmu Komputer Universitas Komputer Indonesia..
6. Bapak Irawan Afrianto, S.T., M.T., selaku ketua Program Studi Teknik Informatika Universitas Komputer Indonesia.
7. Bapak Dr. Yusrila Y. Kerlooza selaku pembimbing yang telah mengajari penulis dalam segala hal.
8. Ibu Sufa’atin, S.T., M.Kom., selaku dosen wali IF-11 angkatan 2009 Program Studi Teknik Informatika Universitas Komputer Indonesia yang telah banyak meluangkan waktu dan perhatian terhadap penulis..
9. Ibu Ken Kinanti Purnamasari, S.Kom., selaku dosen sekaligus penguji tugas akhir penulis.
10. Bapak Taufiq Nuzwir Nizar, S.Kom, M.Kom dan Bapak Rodi Hartono, S.T., selaku pembimbing teknis yang telah memberikan arahan dan bimbingan pada penulis.
11. Teman-teman Divisi Robotika Unikom dan teman-teman kelas IF-11, penulis ucapkan terimakasih atas bantuannya dan dukungannya bagi penulis.
Akhirnya, Penulis berharap semoga Tugas Akhir ini menjadi manfaat bagi dunia sains dan teknologi di Indonesia, khususnya disiplin keilmuan yang penulis dalami.
Bandung, Agustus 2013
DAFTAR PUSTAKA
[1] Badan Pusat Statistik. 2010. Penduduk Menurut Kelompok Umur dan Tingkat
Kesulitan Berjalan atau Naik Tangga. [Online]. Tersedia:
www.sp2010.bps.go.id/index.php/site/tabel?tid=277. [Diakses pada tanggal 13 Januari 2013 pukul 10.00 WIB].
[2] Nisley, Ed (ed). 2011. Trinity CollegeFire-Fighting Home Robot Contest
2012 Rules. [Online]. Tersedia:
www.trincoll.edu/events/robot/rules/Rules2012/rules_2012-final-1-a4.pdf. [Diakses pada tanggal 1 Januari 2012 pukul 20.07 WIB].
[3] Sommerville, Ian. 2011. Software Engineering Ninth Edition. Boston: Addison Wesley.
[4] Kusumadewi, Sri. 2003. Artificial Intelligence (Teknik dan Aplikasinya).
Yogyakarta: Graha Ilmu.
[5] Martiana, Entin. 2010. Introduction to Altificial Intelligence. [Online]. Tersedia: http://lecturer.eepis-
its.edu/~entin/Kecerdasan%20Buatan/Presentasi/Minggu1%20-%20Introduction%20to%20Artificial%20Intelligence.pdf. [Diakses pada tanggal 20 Januari 2013 pukul 20.07 WIB].
[6] Goris, Kristof. (2004). Autonomous Mobile Robot Mechanical Design. Brussels: Vrije Universiteit Brussel.
[7] Boerema, Clifford L . (2011). Steering Techniques. [Online]. Tersedia: www.beam-wiki.org/wiki/Steering_Techniques. [Diakses pada tanggal 10 Januari 2012 pukul 19.10 WIB].
[8] Gridling, G dan Bettina Weiss. 2007. Introduction to Microcontrollers.
[Online]. Tersedia: http://ti.tuwien.ac.at/ecs/teaching/courses/mclu/theory-material/Microcontroller.pdf. [Diakses pada tanggal 20 Januari 2012 pukul 20.00 WIB].
[10]Parallax Inc. PING)))™ Ultrasonic Distance Sensor (#28015 ) V1.3. California: Parallax, 2006.
[11]Tim Digiware. 2011. PING)))™ Ultrasonic Range Finder AN 07. [Online]. Tersedia : http://www.digi-ware.com/file/AN-07.pdf.
[12]Martin, dkk. 2005. BASIC Stamp Programming Manual Version 2.2.
[Online]. Tersedia: http://www.parallax.com/dl/docs/prod/stamps/web-bsm-v2.2.pdf.
[13]Alberts, Mark. 2008. Bascom AVR Help Reference. [Online]. Tersedia: http://www.bipom.com/documents/bascomavr/bascavr.pdf. [Diakses pada tanggal 8 Januari 2012 pukul 15.00 WIB]
[14]Freese, Marc dkk. 2010. Virtual Robot Experimentation Platform V-REP: A
Versatile 3D Robot Simulator . [Online]. Tersedia:
http://robotics.itee.uq.edu.au/~spns/pubcache/simpar2010.vrep.pdf. [Diakses pada tanggal 10 Maret 2013 pukul 19.10 WIB].
[15]Ahlgren, David dan Igor M. Verner. 2011. Social Responsible Engineering Education Through Assistive Robotics Projects: The RoboWaiter
BAB 1
PENDAHULUAN
1.1 Latar Belakang Masalah
Penyandang tunadaksa merupakan seseorang yang memiliki gangguan gerak yang disebabkan oleh berbagai faktor seperti kelainan neuro-muskular,
struktur tulang yang bersifat bawaan, sakit atau akibat kecelakaan. Berdasarkan data sensus penduduk tahun 2010, penyandang tunadaksa di sepuluh provinsi berpenduduk terbesar di Indonesia mencapai 2.308.383 jiwa. [1] Sepuluh provinsi berpenduduk terbesar tersebut yaitu Jawa Barat, Jawa Timur, Jawa Tengah, Sumatera Utara, Banten, DKI Jakarta, Sulawesi Selatan, Lampung, Sumatera Selatan dan Sumatera Barat.
Kebutuhan menyediakan makanan bagi penyandang tunadaksa menjadi hal yang vital karena keterbatasannya. Solusi umum saat ini adalah dengan menyediakan perawat untuk mengambil dan menyiapkan makanan. Masalah yang dihadapi adalah ketika kondisi cuaca buruk, perawat tidak dapat datang untuk melayani penyandang tunadaksa. Sehingga dibutuhkan sebuat alat yang mampu bekerja untuk menggantikan pekerjaan perawat tersebut.
Teknologi robotika dapat menjadi solusi untuk permasalahan ini. Dengan pemanfaatan robot, penyandang tunadaksa dapat memerintahkan robot dengan cara mengaktifkan bel dengan frekuensi tertentu atau dengan menekan tombol start yang ada pada robot. Robot harus bergerak dari tempat awal ke rak tempat makanan disiapkan, kemudian mengambil makanan dan bergerak menuju meja makan untuk meletakkan makanan yang telah diambil. Dalam pergerakkannya robot harus mampu menghindari rintangan dan menjaga makanan agar tidak tumpah. dengan kemampuan robot seperti ini diharapkan penyandang tunadaksa akan memiliki kemandirian dan produktivitas.
2
1.2 Identifikasi Masalah
Berdasarkan latar belakang di atas, maka identifikasi masalah dalam penelitian ini adalah sebagai berikut:
1. Bagaimana algoritma pergerakan robot pembantu penyandang tunadaksa agar bernavigasi dengan tepat melewati rintangan.
2. Bagaimana algoritma pengambilan piring yang berisi makanan di rak pada ketinggian tertentu dengan tepat.
3. Bagaimana algoritma mengantarkan piring yang telah diambil ke atas meja makan yang telah ditetapkan tanpa menjatuhkan piring maupun makanannya.
4. Bagaimana algoritma agar robot dapat kembali ke posisi awal dengan benar.
5. Bagaimana algoritma agar robot dapat mengambil kembali piring yang berada di meja makan kemudian mengntarkannya ke tempat cuci piring.
1.3 Maksud dan Tujuan
Berdasarkan identifikasi masalah di atas, maka maksud dari penelitian ini adalah untuk membuat algoritma purwarupa robot pembantu penyandang tunadaksa yang mampu menyelesaikan tugas sesuai dengan aturan pertandingan. Sedangkan tujuan dari penelitian ini adalah:
1. Untuk mengetahui algoritma pergerakan robot pembantu penyandang tunadaksa agar bernavigasi dengan tepat melewati rintangan sesuai peraturan pertandingan.
2. Untuk mengetahui algoritma pengambilan piring yang berisi makanan di rak pada ketinggian tertentu dengan tepat.
3. Untuk megetahui algoritma mengantarkan piring yang telah diambil ke atas meja makan yang telah ditetapkan tanpa menjatuhkan piring maupun makanannya.
3
5. Untuk mengetahui algoritma agar robot dapat mengambil kembali piring yang berada di meja makan kemudian mengantarkannya ke tempat cuci piring.
1.4 Batasan Masalah
Batasan masalah diambil dari peraturan pertandingan RobotWaiter di Trinity College tahun 2012 yaitu secara garis besar:
1. Ukuran robot dibatasi dengan panjang maksimal 30cm, lebar maksimal 30cm, dan tinggi maksimal 30cm.
2. Bentuk arena yang berukuran 2,5m x 2,5m seperti yang di tunjukan pada gambar 1.2.
3. Terdapat rak dengan ukuran panjang 45 cm, lebar 40 cm dan tinggi antara 20 cm sampai 24 cm.
4. Terdapat piring di atas rak dengan diameter 10 cm ± 0.3 cm dan berat 50 gr.
5. terdapat kursi dengan ukuran panjang 20 cm dan lebar 20 cm. 6. Terdapat meja tempat menyimpan piring dengan ukuran panjang 70
cm, lebar 45 cm, dan tinggi antara 20 cm sampai 24 cm.
7. Waktu yang diberikan untuk mengambil piring di atas rak dan menyimpannya di meja maksimal 4 menit, kembali ke posisi awal maksimal 2 menit dan menyimpan piring ke tempat cuci piring maksimal 4 menit.
4
Gambar 1.1. Arena Pengujian Robot [2]
1.5 Metodologi Penelitian
Metodologi yang digunakan dalam penulisan tugas akhir ini adalah sebagai berikut :
1. Tahap pengumpulan data
Metode pengumpulan data yang digunakan dalam penelitian ini adalah sebagai berikut :
a. Studi Literatur
Pengumpulan data dengan cara mengumpulkan literatur, jurnal, paper dan bacaan-bacaan yang ada kaitannya dengan judul penelitian.
b. Eksperimen
Teknik pengumpulan data dengan mengadakan penelitian dan peninjauan langsung terhadap permasalahan yang diambil.
c. Interview
Teknik pengumpulan data dengan mengadakan tanya jawab secara langsung yang ada kaitannya dengan topik yang diambil. 2. Tahap pembuatan perangkat lunak
5
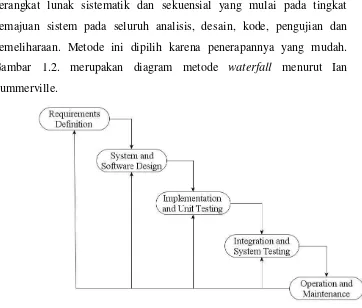
perangkat lunak sistematik dan sekuensial yang mulai pada tingkat kemajuan sistem pada seluruh analisis, desain, kode, pengujian dan pemeliharaan. Metode ini dipilih karena penerapannya yang mudah. Gambar 1.2. merupakan diagram metode waterfall menurut Ian Summerville.
Gambar 1.2 Diagram Metode Waterfall [3]
Penjelasan dari alur metode waterfall ini adalah sebagai berikut:
a. RequirementsDefinition
Requirements Definition merupakan proses menemukan,
memperbaiki, memodelkan dan menspesifikasikan kebutuhan dari semua elemen yang dibutuhkan oleh sistem. Semua elemen tersebut kemudian didefinisikan secara rinci dan dimanfaatkan sebagai spesifikasi sistem.
b. System and Software Design
6
c. Implementation and Unit Testing
Implementation and Unit Testing merupakan tahap
penerjemahan data atau pemecahan masalah yang telah dirancang ke dalam bahasa pemrograman tertentu. Program yang dibangun langsung diuji baik secara unit.
d. Integration and System Testing
Integration and System Testing merupakan tahap pengujian terhadap perangkat lunak yang dibangun dan integrasinya dengan perangkat keras yang digunakan.
e. Operation and Maintenance
Merupakan tahap pengembangan perangkat lunak dan perangkat keras yang dibangun, disesuaikan dengan kebutuhan-kebutuhan spesifikasi sistem.
1.6 Sistematika Penulisan
Sistematika penulisan proposal penelitian ini disusun untuk memberikan gambaran umum tentang penelitian yang dijalankan. Sistematika penulisan laporan kerja praktek ini adalah sebagai berikut :
BAB I PENDAHULUAN
Bab ini berisi latar belakang, perumusan masalah, maksud dan tujuan, batasan masalah, metodologi penelitian, sistematika penulisan.
BAB II TINJAUAN PUSTAKA
Bab ini membahas landasan teori yang berisi teori-teori pendukung yang digunakan dalam membangun sistem ini.
BAB III ANALISIS DAN PERANCANGAN
7
BAB IV IMPLEMENTASI DAN PENGUJIAN
Bab ini meliputi hasil implementasi dari analisis dan perancangan yang telah dilakukan beserta hasil pengujian sehingga diketahui apakah sistem yang dibangun sudah memenuhi syarat dan dapat memenuhi tujuannya dengan baik. BAB V KESIMPULAN DAN SARAN
BAB 5
KESIMPULAN DAN SARAN
5.1. Kesimpulan
Berdasarkan uraian yang telah dibahas dalam bab sebelumnya, dapat diambil kesimpulan sebagai berikut:
1. Robot pembantu penyandang tunadaksa (DU99RWS4-V12) dapat melewati rintangan yang ada sesuai dengan peraturan perlombaan
Robowaiter di Trinity College, Harford, Connecticut 2012.
2. Robot pembantu penyandang tunadaksa (DU99RWS4-V12) dapat mengambil piring yang berisi makanan di rak pada ketinggian antara 20 cm - 24 cm.
3. Robot pembantu penyandang tunadaksa (DU99RWS4-V12) dapat mengantarkan piring yang telah diambil ke atas meja makan yang telah ditetapkan tanpa menjatuhkan piring maupun makanannya. 4. Robot pembantu penyandang tunadaksa (DU99RWS4-V12) dapat
kembali ke posisi awal (home) dengan benar.
5. Robot pembantu penyandang tunadaksa (DU99RWS4-V12) dapat mengambil kembali piring yang berada di meja makan kemudian mengantarkannya ke tempat cuci piring.
5.2. Saran
Berdasarkan kesimpulan yang diuraikan sebelumnya, maka dapat diambil saran-saran sebagai berikut:
1. Robot penyandang tunadaksa dapat dikembangkan dalam skala yang sesungguhnya.
BIODATA PENULIS
A. Data Probadi
Nama : Anton Ade Purnama Tempat/Tgl Lahir : Sumedang, 12 Juni 1990 Jenis Kelamin : Laki-laki
Agama : Islam
Alamat : Dsn. Sirahcai RT 03/ RW 03 Ds. Cisempur Kec. Jatinangor Kab. Sumedang
No. HP : 089605922594
Email : [email protected]
B. Pendidikan Formal
1995-1996 TK Gelatik, Jatinangor 1996-2002 SDN Sirahcai, Jatinangor 2002-2005 SMPN 1 Jatinangor 2005-2008 SMAN Jatinangor
Bandung, Agustus 2013
![Gambar 1.1. Arena Pengujian Robot [2]](https://thumb-ap.123doks.com/thumbv2/123dok/1373282.799445/16.595.203.464.113.308/gambar-arena-pengujian-robot.webp)