DAFTAR RIWAYAT HIDUP
Data Pribadi
Nama : Muhammad Aulia Rahman
Alamat : Jalan Pemuda No.80, rt.01 rw.08 Kecamatan
Pancoranmas, Kelurahan Depok, Kota Depok 16431
Nomor Telepon : 081809404880
Email : [email protected]
Jenis Kelamin : Laki-laki
Tanggal Kelahiran : 20 Agustus 1992
Status Marital : Belum menikah
Warga Negara : Indonesia
Agama : Islam
Riwayat Pendidikan
No Sekolah / universitas
Keterangan : Universitas Komputer Indonesia program studi Teknik Elektro Kendali Fakultas Teknik dan Ilmu Komputer dari tahun 2009 – 2013. Dengan transkrip nilai 3,21.
Pendidikan Non Formal / Training – Seminar
1. “TREND CYBERPRENEURSHIP 2011”,28 Mei 2011 UNIKOM 2. “Linux Desktop, Virtualization & VoIP”, 8 Januari 2011 UNIKOM
3. “Ready to Clouds Computing with Windows 8 and Office 365”, 7 Januari 2012 UNIKOM
4. “Be a successful enterpreneur by developing mobile applications”, 27 September 2011 ITB
Kecakapan Berbahasa
No Bahasa Kemampuan
Membaca Menulis Berbicara Mendengar
1 Indonesia Ya Ya Ya Ya
2 Sunda Ya Ya Ya Ya
3 Inggris Ya Ya Ya Ya
Kemampuan
Kemampuan komputer (Ms.Word, Excell, Power Point).
TUGAS AKHIR
STUDI KOMPARASI KONTROL LOGIKA FUZZY SECARA SIMULASI UNTUK PARKIR MOBIL SERI OTOMATIS MENGGUNAKAN LABVIEW
Diajukandalamrangkamemenuhisalahsatupersyaratanuntukmenyelesaikan program studi Strata-1 JurusanTeknikElektro
Oleh:
Muhammad Aulia Rahman 13109012
PROGRAM STUDI TEKNIK ELEKTRO
FAKULTAS TEKNIK DAN ILMU KOMPUTER
UNIVERSITAS KOMPUTER INDONESIA
BANDUNG
KATA PENGANTAR
Puji dan syukur penulis panjatkan kehadirat Allah SWT, atas rahmat dan
hidayah-Nya serta bantuan dari berbagai pihak sehingga penulis dapat menyusun dan menyelesaikan laporan tugas akhir.
Dalam menyusun laporan ini, tentu saja penulis mengalami kesulitan, tetapi berkat adanya bimbingan dan bantuan dari berbagai pihak, akhirnya kesulitan tersebut dapat penulis atasi.Selain itu, penulis menyadari sepenuhnya bahwa
laporan ini jauh dari sempurna.Untuk itu, dengan keterbukaan hati, penulis mengharapkan saran dan kritik yang sifatnya membangun demi kesempurnaan
laporan berikutnya.
Pada kesempatan ini, tidak lupa penulis ucapkan terima kasih kepada semua pihak yang telah membantu kelancaran penyelesaian laporan ini, terutama kepada:
1. Mama, Papa, Kakak serta seluruh Keluarga yang selalu memberikan semangat ,doa restu serta pengorbanan yang sangat mulia dan tanpa
pamrih kecuali mengharapkan ridho-Nya.
2. Bapak Dr. Ir. Eddy Suryanto Soegoto, M.Sc, sebagai Rektor UNIKOM Bandung.
3. Bapak Prof. Dr. H. Denny Kurniadie,Ir., M.Sc., sebagai Dekan Fakultas Teknik dan Ilmu Komputer UNIKOM Bandung.
5. Ibu Tri Raharjoeningroem, MT, sebagai koordinator Tugas Akhir Jurusan
Teknik Elektro UNIKOM Bandung.
6. Para Dosen Jurusan Teknik Elektro UNIKOM Bandung.
7. Rekan seperjuangan dan teman dalam suka maupun duka selama di bandung Ipan Irwanto yang telah memberikan semangat, motivasi, dan bantuan dalam pembuatan laporan ini.
8. Rekan-rekan mahasiswa dan mahasiswi Teknik Elektro UNIKOM yang telah memberikan bantuan dan semangat selama pembuatan alat dan
penulisan laporan ini.
Semoga amal baik yang telah diberikannya mendapat imbalan yang setimpal dari Allah SWT.Amin.
Penulis menyadari sepenuhnya bahwa laporan ini perlu penyempurnaan.Karena itu, kritik dan saran dari semua pihak sangat penulis harapkan.Akhirnya penulis berharap semoga laporan ini dapat memberikan
manfaat bagi peningkatan mutu pengajaran Teknik Elektro UNIKOM.
Bandung, Agustus 2013
DAFTAR ISI
LEMBAR PERSETUJUAN LAPORAN TUGAS AKHIR
ABSTRAK………...E
rror! Bookmark not defined.
ABSTRACT ...Error! Bookmark not defined.
KATA PENGANTAR ...Error! Bookmark not defined.
DAFTAR ISI...Error! Bookmark not defined.
DAFTAR GAMBAR ...Error! Bookmark not defined.
DAFTAR TABEL ...Error! Bookmark not defined.
BAB I PENDAHULUAN
1.1 Latar Belakang ...Error! Bookmark not defined.
1.2 Identifikasi Masalah ...Error! Bookmark not defined.
1.3 Rumusan Masalah ...Error! Bookmark not defined.
1.4 Tujuan...Error! Bookmark not defined.
1.5 Batasan Masalah...Error! Bookmark not defined.
1.6 Metode Penelitian...Error! Bookmark not defined.
1.7 Sistematika Penulisan...Error! Bookmark not defined.
BAB II LANDASAN TEORI
2.2 Perbedaan Logika Fuzzy dan Logika Tegas...Error! Bookmark not
defined.
2.3 Himpunan Fuzzy ...Error! Bookmark not defined.
2.4 Dasar Logika Fuzzy...Error! Bookmark not defined.
2.4.1 Fungsi Keanggotaan (Membership Function)Error! Bookmark not
defined.
2.5 Cara Kerja Kontrol Logika Fuzzy ...Error! Bookmark not defined.
2.5.1 Fuzzifikasi ...Error! Bookmark not defined.
2.5.2 Aturan Dasar Logika Fuzzy ...Error! Bookmark not defined.
2.5.3 Mesin Penalaran Kontrol Logika Fuzzy (Inference Engine) ...Error!
Bookmark not defined.
2.5.4 Defuzzifikasi ...Error! Bookmark not defined.
2.6 Permasalahan Pada Sistem Parkir Seri Otomatis ..Error! Bookmark not
defined.
2.7 Perangkat Lunak Labview...Error! Bookmark not defined.
2.7.1 Front Panel...Error! Bookmark not defined.
2.7.2 Blok Diagram ...Error! Bookmark not defined.
2.7.3 Control dan Function Pallete...Error! Bookmark not defined.
BAB III PERANCANGAN SIMULASI
3.1 Perancangan Sistem Parkir Mobil Seri Otomatis ..Error! Bookmark not
3.2 Kontrol Logika Fuzzy Untuk Mobil Parkir Secara Otomatis...Error!
Bookmark not defined.
3.3 Perancangan Fuzzy Inference...Error! Bookmark not defined.
3.4 Perancangan Aturan Logika Fuzzy Pada LabviewError! Bookmark not
defined.
BAB IV PENGUJIAN DAN ANALISIS
4.1 Percobaan Simulasi Pertama ...Error! Bookmark not defined.
4.2 Percobaan Simulasi Kedua ...Error! Bookmark not defined.
4.3 Percobaan Simulasi ketiga...Error! Bookmark not defined.
4.4 Percobaan Simulasi keempat...Error! Bookmark not defined.
BAB V KESIMPULAN DAN SARAN
5.1 Kesimpulan...Error! Bookmark not defined.
5.2 Saran ...Error! Bookmark not defined.
DAFTAR PUSTAKA ...Error! Bookmark not defined.
DAFTAR PUSTAKA
[1] Aria. Muhammad, Design Of Type-2 Fuzzy Controller For Truck
Backer-Upper Problem, Bandung: Universitas Komputer Indonesia.
[2] “Dasar Logika Fuzzy”, pp. 1-26, Universitas Widyagama Malang, 2008
[3] “PID Control Toolset User Manual”, National Instruments Labview, 2001
[4] K.C. Wu, “Fuzzy Interval Control of Mobile Robots”, Comput. Elect. Eng.,
vol. 22, no. 3, pp. 211-229, 1996
[5] L.-X. Wang and J. M. Mendel, “Generating Fuzzy Rules by Learning From
Example”, IEEE Trans. On System, Man, and Cybernetics, vol 22, no. 6, pp.
1414 – 1427, 1992
[6] D. Nguyen and B. Widrow, “The Truck Backer-Upper: An Example of
Self-Learning in Neural Network”, IEEE Contr. Syst. Mag., vol. 10, no. 2, pp.
BAB I
PENDAHULUAN
1.1 Latar Belakang
Pada era globalisasi seperti sekarang ini, kemajuan ilmu pengetahuan dan
teknologi telah mendorong manusia untuk berusaha mengatasi segala
permasalahan yang timbul disekitarnya untuk meringankan pekerjaan yang
ada.Salah satu perkembangan teknologi ini adalah telah berkembangnya teknologi
menggunakan simulasi.
Dimana pembuatan teknologi ini membantu permasalahan yang ada
sebelum berkembang ke kenyataannya.Mobil adalah salah satu topik yang
ssedang diperbincangkan. Pada saat ini banyak pengguna mobil menginginkan
mobil miliknya dapat melakukan proses parkir secara otomatis. Apabila dalam
proses parkir mobil otomatis masih banyak kekurangan maka fungsi dari simulasi
ini untuk meminimalkan kesalahan-kesalahan yang terjadi saat melakukan proses
parkir.
Pada tugas akhir ini dilakukan studi komparasi untuk meminimalisasikan
kekurangan dalam proses parkir mobil otomatis. Dengan membuat persamaan
kontrol logika fuzzy untuk parkir mobil otomatis dan membandingkannya dengan
persamaan kontrol logika fuzzy dari referensi.
1.2 Identifikasi Masalah
Berdasarkan latar belakang yang telah dikemukakan, maka dapat
logika fuzzy dari referensi dan dibandingkan dengan kontrol logika fuzzy yang di
rancang untuk mengetahui waktu terbaik untuk melakukan proses parkir mobil
seri otomatis.
1.3 Rumusan Masalah
Berdasarkan permasalahan yang teridentifikasi di atas, maka pada tugas akhir
ini memiliki rumusan masalah yaitu bagaimana merancang kontrol logika fuzzy
untuk parkir mobil seri otomatis dan dibandingkan dengan kontrol logika fuzzy
dari referensi.
1.4 Tujuan
Tujuan pada penulisan tugas akhir ini yaitu merancang kontrol logika fuzzy
alternatif untuk parkir mobil seri otomatis.
1.5 Batasan Masalah
Untuk menghindari pembahasan yang menyimpang dari topik yang dipilih,
maka dalam penyusunan laporan tugas akhir ini permasalahannya dibatasi pada:
1. simulasi menggunakan software LABVIEW 7.1
2. lahan parkir sudah ditentukan pada simulasi ini
3. simulasi ini hanya untuk permasalahan sistem parkir mobil seri otomatis
4. simulasi ini menggunakan metode logika fuzzy
1.6 Metode Penelitian
Dalam menyusun laporan tugas akhir ini diperlukan beberapa metode
1. tinjauan Pustaka, merupakan suatu metoda pengumpulan data dengan cara
membaca atau mempelajari buku-buku yang berhubungan dengan masalah
yang menjadi topik dalam skripsi.
2. survey, adalah proses pengamatan secara langsung terhadap permasalahan
yang dihadapi.
3. pengumpulan data, merupakan metoda untuk mendapatkan data dari topik
yang diambil dengan cara mengajukan pertanyaan secara langsung kepada
pihak-pihak yang berkompeten mengenai hal-hal yang dipelajari selama
pengerjaan tugas akhir. Pertanyaan-pertanyaan ini diajukan kepada dosen
pembimbing di kampus dan sumber lainnya.
4. pengolahan data, merupakan proses pengolahan data-data yang didapat dari
hasil pengumpulan data, untuk dijadikan referensi dalam pengerjaan tugas
akhir.
5. pengujian, merupakan metoda untuk mengetahui hasil dari perancangan
simulasi yang dibuat.
6. analisa, adalah proses pendalaman terhadap simulasi yang dibuat apakah
sudah berhasil sesuai dengan yang direncanakan atau belum, selanjutnya akan
dilakukan pengujian baik secara teoritis ataupun praktis, dan jika terdapat
kekurangan maka akan dilakukan beberapa perbaikan simulasi sehingga
akhirnya penulis dapat mengambil sebuah kesimpulan dari penelitian ini.
1.7 Sistematika Penulisan
Sistematika penulisan bertujuan untuk menguraikan urutan penulisan skripsi,
susunan dan hubungan antar bab, serta fungsi setiap bab yang ada di skripsi ini,
sistematika penulisan skripsi dibagi menjadi lima bab pokok, yaitu sebagai
berikut:
BABI : PENDAHULUAN
Bab ini meliputi latar belakang, identifikasi masalah, rumusan masalah, tujuan,
batasan masalah, metode penelitian, dan sistematika penulisan.
BAB II : LANDASAN TEORI
Berisi teori tentang permasalahan yang dibahas dalam skripsi mulai dari
menjelaskan tentang dasar logika fuzzy, penentuan model logika fuzzy.
BAB III :PERANCANGAN SIMULASI
Bab ini berisi tentang perancangan simulasi untuk parkir otomatis.
BABIV : PENGUJIAN DAN ANALISIS
Bab ini berisi tentang hasil pengujian dari simulasi yang dibuat serta analisanya.
BAB V : PENUTUP
Bab ini berisi rincian kesimpulan serta saran untuk kajian lanjutan dari
BAB II
LANDASAN TEORI
2.1 Logika Fuzzy
Logika Fuzzy pertama kali dikembangkan oleh Lotfi A. Zadeh pada
tahun1965. Teori ini banyak diterapkan di berbagai bidang, antara lain
representasipikiran manusia kedalam suatu sistem. Banyak alasan mengapa
penggunaanlogika fuzzy ini sering dipergunakan antara lain, konsep logika fuzzy
yang miripdengan konsep berpikir manusia. Sistem fuzzy dapat
merepresentasikanpengetahuan manusia ke dalam bentuk matematis dengan lebih
menyerupai caraberpikir manusia.Pengontrol dengan logika fuzzy mempunyai
kelebihan yaitudapat mengontrol sistem yang kompleks, non-linier, atau sistem
yang sulitdirepresentasikan kedalam bentuk matematis.Selain itu, informasi
berupapengetahuan dan pengalaman mempunyai peranan penting dalam
mengenaliperilaku sistem di dunia nyata.
Logika fuzzy juga memiliki himpunan fuzzy yang mana pada dasarnya,
teorihimpunan fuzzy merupakan perluasan dari teori himpunan klasik. Dimana
dengan logika fuzzy, hasil yang keluar tidak akan selalu konstan dengan input
yang ada.Cara kerja logika fuzzy secara garis besar terdiri dari input, proses dan
output.Logika fuzzy merupakan suatu teori himpunan logika yang dikembangkan
untukmengatasi konsep nilai yang terdapat diantara kebenaran (truth) dan
kesalahan(false). Dengan menggunakan fuzzy logic nilai yang dihasilkan bukan
2.2 Perbedaan Logika Fuzzy dan Logika Tegas
Perbedaan antara kedua jenis logika ini adalah logika fuzzy memiliki nilai 0
hingga 1, sedangkan logika tegas 0 dan 1.Secara grafik perbedaan logika fuzzy
dan logika tegas ditunjukan pada gambar 2.1.
Gambar 2.1 Perbedaan logika fuzzy (a) dan logika tegas (b)
Pada gambar 2.1 (a) apabila x lebih dari atau sama dengan 10 baru dikatakan
benar yaitu y=1, sebaliknya nilai x kurang dari 10 adalah salah yaitu y=0. Maka
angka 9, 8, dan 7 dan seterusnya adalah dikatakan salah. Pada gambar 2.1 (b) nilai
x= 9, 8, atau 7 atau nilai antara 0 – 10 dapat dikatakan benar dan dapat dikatakan
salah.
Dalam contoh kehidupan kita seseorang dikatakan sudah dewasa apabila berumur
17 tahun, maka siapapun yang kurang umur dari 17 tahun didalam logika tegas
akan dikatakan sebagai belum dewasa atau anak-anak. Sedangkan dalam hal ini
pada logika fuzzy umur 17 tahun dapat dikategorikan dewasa tapi belum dewasa,
misal untuk umur 16 tahun dan 15 tahun atau 14 tahun dan 13 tahun. Secara grafik
Gambar 2.2 Perbandingan contoh logika tegas (a) dan logika fuzzy (b)
2.3 Himpunan Fuzzy
Dalam teori logika fuzzy
pengelompokan sesuatu
dinyatakan dalam fungsi
dicourse), Fungsi keanggotaan
sampai dengan 1.
Contoh dari himpunan variabel bahasa antara lain:
Himpunan suhu atau temperatur
hangat, dan panas.Grafik dari himpunan suhu ini ditun
Gambar 2.3 Contoh keanggotaan himpunan temperatur atau suhu Gambar 2.2 Perbandingan contoh logika tegas (a) dan logika fuzzy (b)
Himpunan Fuzzy
logika fuzzy dikenal himpunan fuzzy (fuzzy sets) yang
sesuatu berdasarkan variabel bahasa (linguistik variabel
dalam fungsi keanggotaan.Didalam semesta pembicaraan
keanggotaan dari suatu himpunan fuzzy tersebut
Contoh dari himpunan variabel bahasa antara lain:
atau temperatur dapat dinyatakan dengan dingin,
hangat, dan panas.Grafik dari himpunan suhu ini ditunjukan pada gambar 2.3 ini.
Gambar 2.3 Contoh keanggotaan himpunan temperatur atau suhu Gambar 2.2 Perbandingan contoh logika tegas (a) dan logika fuzzy (b)
) yang merupakan
linguistik variabel), yang
pembicaraan (universe of
fuzzy tersebut bernilai 0
dingin, sejuk, normal,
jukan pada gambar 2.3 ini.
Himpunan umur dapat dinyatakan dengan muda, parobaya, tua, dan sangat
tua.Grafik dari himpunan umur ini ditunjukan pada gambar 2.4 ini.
Gambar 2.4 Contoh keanggotaan himpunan umur
Himpunan dari kecepatan dapat dinyatakan dengan lambat, normal, cepat, dan
sangat cepat.Grafik dari himpunan umur ini ditunjukan pada gambar 2.5 ini.
2.4 Dasar Logika Fuzzy
2.4.1 Fungsi Keanggotaan (Membership Function)
Fungsi keanggotaan merupakan suatu kurva yang menunjukkan
pemetaantitik-titik input data kedalam nilai keanggotaanya (disebut juga dengan
derajat keanggotaan) yang memiliki interval antara 0 sampai 1. Untuk
mendapatkannilai keanggotaan dapat menggunakan cara pendekatan fungsi.
Ada beberapa fungsi keanggotaan yang digunakan dalam teori himpunanfuzzy
adalah:
Representasi Linier
Pada representasi linear, pemetaan input ke derajat keanggotaan
nyadigambarkan sebagai suatu gari lurus. Bentuk ini paling sederhana
danmenjadi pilihan yang baik untuk mendekati suatu konsep yang kurang
jelas.Ada 2 keadaan himpunan fuzzy yang linear. Pertama, kenaikan
himpunandimulai pada nilai domain yang memiliki derajat keanggotaan
nol [0]bergerak ke kanan menuju kenilai domain yang memiliki derajat
keanggotaan lebih tinggi seperti pada Gambar 2.6.
Gambar 2.6 Representasi Linear Naik Derajat
Persamaan fungsi keanggotaan linear naik:
Kedua, merupakan kebalikan yang pertama.Garis lurus dimulai dari nilai
domain dengan derajat keanggotaan tertinggi pada sisi kiri, kemudian
bergerak menurun ke nilai domain yang memiliki derajat keanggotaan lebih
rendah seperti pada Gambar 2.7.
Gambar 2.7 Representasi Linear Turun
Fungsi keanggotaan linear turun :
Gambar 2.8 Representasi Kurva Segitiga
Persamaan fungsi keanggotaan kurva segitiga:
Kurva trapesium pada dasarnya seperti bentuk segitiga, hanya saja
ada beberapa titik yang memiliki nilai keanggotaan 1 seperti pada Gambar
2.9.
Persamaan fungsi keanggotaan Kurva Trapesium :
Daerah yang terletak ditengah-tengah suatu variable yang
dipresentasikan dalam bentuk segitiga, pada sisi kanan dan kirinya akan
naik dan turun (misalkan: dingin bergerak ke sejuk bergerak ke hangat
dan bergerak ke panas). Tetapi terkadang salah satu sisi dari variable
tersebut tidak mengalami perubahan. Sebagai contoh, apabila telah
mencapai kondisi panas, kenaikan temperature akan tetap berada pada
kondisi panas. Himpunan fuzzy ‘bahu’, bukan segitiga, digunakan untuk
mengakhiri variable suatu daerah fuzzy. Bahu kiri bergerak dari benar ke
salah, demikianjuga bahu kanan bergerak dari salah ke benar. Gambar
menunjukkan variable temperature dengan daerah bahunya.
Gambar 2.10 Representasi Kurva Bahu
2.5 Cara Kerja Kontrol Logika Fuzzy
Dalam sistem kontrol logika fuzzy terdapat beberapa tahapan operasional
meliputi:
1. Fuzzifikasi.
2. mesin penalaran atau inference engine.
3. aturan dasar (fuzzy rule).
4. defuzzifikasi.
Blok diagram kontrol logika fuzzy ditunjukkan pada gambar 2.11.
Kerangka operasional kontrol logika fuzzy ditunjukkan pada gambar 2.12.
Gambar 2.12 Kerangka kerja kontrol logika fuzzy
Dari gambar 2.12 sinyal masukan dari kontrol logika fuzzy dapat berupa nilai
tegas. Sinyal masukan kontrol logika fuzzy dapat diambilkan dari.
1. Selisih antara nilai rujukan (reference) dengan nilai keluaran nyata dari
kontrol logika fuzzy yang berupa nilai kesalahan (error = E).
2. Turunan pertama dari nilai error yang dikenal dengan delta error = dE
2.5.1 Fuzzifikasi
Fuzzifikasi yaitu suatu proses untuk mengubah suatu masukan dari bentuk
tegas (crisp) menjadi fuzzy (variabel linguistik) yang biasanya disajikan dalam
bentuk himpunan-himpunan fuzzy dengan suatu fungsi kenggotaannya
masing-masing. Contoh dari proses Fuzzification adalah seperti yang ditunjukkan di
gambar 2.13. Sebuah sistem fuzzy untuk mengukur suhu mempunyai 5 buah
sangat panas. Kemudian input yang diperoleh dari crisp input adalah 47° maka
pengambilan fuzzy input-nya adalah seperti pada gambar 2.13.
Gambar 2.13 Proses perubahan dari crisp/nilai tegas menjadi fuzzy input
Sehingga didapat 2 fuzzy input yang masing-masing adalah: dingin (x2)
dan hangat (x1). Nilai x1 dan x2 dapat dicari dengan rumus persamaan garis.Yang
menentukan sistem anda sensitif atau tidak adalah membership function ini.Jika
membership function-nya banyak maka sistem anda menjadi sensitif. Yang
dimaksud dengan sensitif dalam hal ini adalah jika input-nya berubah sedikit saja
maka sistem akan cepat merespon dan menghasilkan suatu output lain. Output
dari proses fuzzification ini adalah sebuah nilai input fuzzy atau yang biasanya
dinamakan fuzzy input.
2.5.2 Aturan Dasar Logika Fuzzy
Aturan dasar atau rule base pada kontrol logika fuzzy merupakan suatu bentuk
aturan relasi/implikasi “Jika-Maka” atau “If-Then” seperti pada pernyataan
berikut:
“JIKA” X=A dan “JIKA” Y=B “MAKA” Z=C
Contoh dari aturan jika-maka ini pada pengendalian suhu ruangan dengan
pengaturan kecepatan kipas angin melalui frekuensi variabel adalah sebagai
1. “JIKA” suhu panas dan
2. “JIKA” kecepatan kipas sangat lambat
3. “MAKA” sumber frekuensi dinaikkan sangat tinggi agar kecepatan kipas
tinggi
Jadi aturan dasar kontrol logika fuzzy ditentukan dengan bantuan seorang pakar
yang mengetahui karakteristik objek yang akan dikendalikan. Aturan dasar
tersebut dapat dinyatakan dalam bentuk matrik aturan dasar kontrol logika fuzzy.
Contoh aturan dasar pengaturan suhu ruangan dapat dilihat pada tabel berikut.
Tabel 2.1 Contoh matrik aturan dasar perancangan kontrol logika fuzzy
x/y B S K
B K K B
S K S K
K B K B
Dimana,
X= Suhu, Y= Kecepatan Kipas.
2.5.3 Mesin Penalaran Kontrol Logika Fuzzy (Inference Engine)
Mesin penalaran (Inference Engine) adalah proses implikasi dalam
menalar nilai masukan guna penentuan nilai keluar sebagai bentuk pengambil
keputusan. Salah satu model penalaran max-min. Dalam penalaran max-min
proses pertama yang dilakukan adalah melakukan operasi operasi min sinyal
keluaran lapisan fuzzifikasi, yang diteruskan dengan operasi max untuk mencari
nilai keluaran yang selanjutnya akan difuzzifikasikan sebagai bentuk keluaran
1. Operasi min (
(crisp) proses ini merupakan kebalikan ari proses fuzzi
(irisan)
Proses penalaran max-min dapat dijelaskan dengan gambar 2.14.
Gambar 2.14 Operasi max-min secara grafis
Defuzzifikasi
merupakan proses pemetaan himpunan fuzzy kemampuan
oses ini merupakan kebalikan ari proses fuzzifikasi.
= a if a > b………(2.5)
≥ b………...(2.6)
Metode dalam defuzzifikasi antara lain:
a. Metode Max
Solusi himpunan fuzzy diperoleh dengan cara mengambil nilai maksimum
aturan, kemudian menggunakannya untuk memodifikasi daerah fuzzy, dan
mengaplikasikannya ke output dengan menggunakan operator OR (union).
Secara umum dapat dituliskan :
µsf [xi] = max(µsf[xi], µkf[xi])...(2.7)
b. Metode Additive (Sum)
Solusi himpunan fuzzy diperoleh dengan cara melakukan bounded sum
terhadap semua output daerah fuzzy. Secara umum dapat dituliskan :
µsf [xi] = min(1,µsf[xi] + µkf[xi])...(2.8)
c. Metode Probabilistik OR (probor)
Solusi himpunan fuzzy diperoleh dengan cara melakukan product terhadap
semua output daerah fuzzy. Secara umum dapat dituliskan :
µsf [xi] = (µsf[xi] + µkf[xi]) - (µsf[xi] * µkf[xi])...(2.9)
Keterangan :
µsf [xi] : nilai keanggotaan solusi fuzzy sampai aturan ke-i
µkf[xi] : nilai keanggotaan konsekuen aturan ke-i
Metode defuzzyfikasi yang akan digunakan adalah Metode Center of Area (COA).
Dimana pada metode ini, solusi crisp diperoleh dengan cara mengambil titik pusat
(z*) daerah fuzzy. Secara umum dirumuskan :
z*= ∫
∫ ...(2.10)
z*= ∑ ( )
2.6 Permasalahan Pada Sistem Parkir Seri Otomatis
Pada simulasi ini posisi truk ditentukan oleh 3 variable ᴓ, x dan y. Dimana
variable θ merupakan sudut orientasi, dan untuk pasangan koordinat (x,y)
merupakan sebagai posisi dimana mobil akan memulai untuk melakukan proses
parkir. Sedangkan output dari simulasi ini yaitu θ, sudut kemudi (steering
angle)yang digunakan untuk mengontrol mobil tersebut agar bisa mencapai posisi
parkir yang ditentukan secara otomatis.
Mobil akan melakukan gerak maju atau mundur dari rules dan
membership function yang telah ditentukan. Sehingga akan menghasilkan kontrol
mobil dengan sudut kemudi yang tepat, agar mobil bisa mencapai posisi awal
parkir yang telahditentukan.
Gambar 2.14 Perancangan mobildanlahanparkir
Untuk mempermudah pada simulasi sistem control ini diasumsikan untuk
masukan∅berada pada jarak [-900, -2700] sedangkan untuk masukan x dan y
Karena sistem ini masih menggunakan simulasi, jadi harus mengetahui terlebih
dahulu dinamika prosedur untuk pergerakan maju-mundurnya mobil. Dan pada
sistem ini menggunakan persamaan kinematika sebagai berikut.
x(t+1) = x(t) – cos (∅(t) + θ(t))–sin (θ(t) + ∅(t))...(2.12)
y(t+1) = y(t) – sin (∅(t) + θ(t))–cos (θ(t) + ∅(t))...(2.13)
∅(t+1) = ∅(t) – sin -1 ( ( )) ...(2.14)
Dimana, (x , y) = koordinat bagian belakang mobil sebagai poros titik tengah
b = panjang dari mobil tersebut
2.7 Perangkat Lunak Labview
LabVIEW adalah sebuah software pemograman yang diproduksi oleh
National Instruments. Seperti bahasa pemograman lainnya yaitu C++, matlab atau
visual basic, LabVIEW juga mempunyai fungsi dan peranan yang sama,
perbedaannya adalah LabVIEW menggunakan bahasa pemrograman berbasis
grafis atau blok diagram sedangkan bahasa pemrograman lainnya menggunakan
text. Program LabVIEW dikenal dengan sebutan VI atau virtual instruments
karena penampilan dan operasinya dapat meniru sebuah instrument. Pada
LabVIEW, user pertama-tama membuat user interface atau front panel dengan
menggunakan kontrol dan indikator, yang dimaksud dengan kontrol adalah knobs,
push buttons, dials dan peralatan input lainnya sedangkan yang dimaksud dengan
indikator adalah graphs, LEDs dan peralatan display lainnya. Setelah menyusun
mengontrol front panel. Software LabVIEW terdiri dari tiga komponen
utama,yaitu:
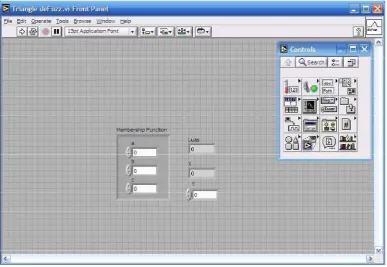
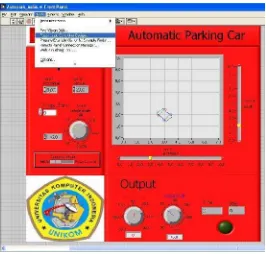
2.7.1 Front Panel
Front Panel adalah bagian window yang mempunyai background abu-abu
serta mengandung kontrol dan indikator. Frontpanel digunakan untuk membangun
sebuah VI, menjalankan program dan mendebug program. Tampilan dari front
panel dapat di lihat pada gambar 2.10.
Gambar 2.10 Front Panel
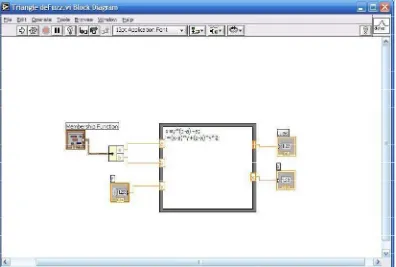
2.7.2 Blok Diagram
Blok diagram adalah bagian window yang berlatar belakang putih berisi
source code yang dibuat dan berfungsi sebagai instruksi untuk front panel.
Gambar 2.11 Blok diagram
2.7.3 Control dan Function Pallete
Control dan function palletedigunakan untuk membangun sebuah VI.
a. Control Pallete
Control pallete merupakan tempat beberapa control dan indikator
padafront panel, control pallete hanya tersedia di front panel,
untukmenampilkan control pallete dapat dilakukan dengan mengklik
windows>> show control pallete atau klik kanan pada front panel.Contoh
Gambar 2.12 Control Pallete
b. Function Pallete
Function pallete di gunakan untuk membangun sebuah blok
diagram,function pallete hanya tersedia pada blok diagram,
untukmenampilkannya dapat dilakukan dengan mengklik windows >>
showcontrol pallete atau klik kanan pada lembar kerja blok diagram.
Contoh dari function palleteditunjukkan pada gambar 2.13.
BAB III
PERANCANGAN SIMULASI
Pada bab ini dijelaskan perancangan untuk mengetahui alur kerja dari
sistem yang akan dibuat. Pada perancangan ini dibuat 2 kontrol logika fuzzy
untuk mobil parkir secara otomatis agar dapat mengetahui perbandingan dari segi
performansinya.
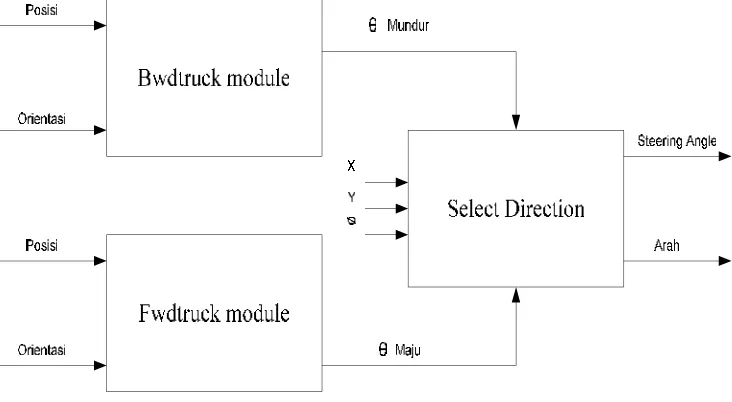
3.1 Perancangan Sistem Parkir Mobil Seri Otomatis
Kontrol logika fuzzy pada perancangan ini menggunakan modul backward
truck yang terdapat pada software labview.Pada modul backward truck ini
memiliki 35 aturan dapat dilihat pada tabel 3.2.Untuk struktur modul backward
truck ini dapat dilihat pada gambar 3.1.
Pada modul backward truck memiliki 2 masukan yaitu, x dan y untuk posisi mobil
dan ᴓ untuk orientasi dari mobil, dan keluaran pada modul backward truck ini
adalah θ sebagai sudut steering pada mobil.
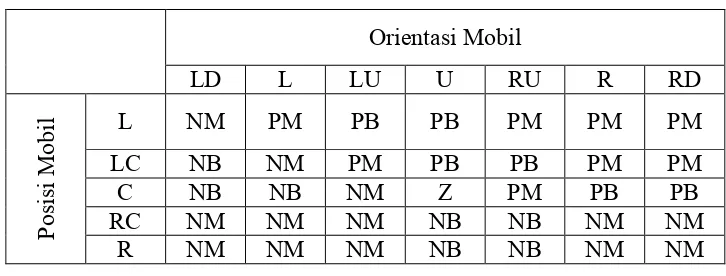
Bagian fuzzy untuk sistem mobil parkir otomatis ini dapat dilihat pada tabel 3.1
Tabel 3.1 Bagian fuzzy untuk sistem mobil parkir otomatis
Orientasi Mobil Posisi Mobil Sudut Steering Mobil
LD : Left-Down
3.2 Kontrol Logika Fuzzy Untuk Mobil Parkir Secara Otomatis
Pada perancangan kontrol logika fuzzy ini memiliki 2 kontrol logika fuzzy
yang sudah ditentukan nilainya. Kedua kontrol logika fuzzy ini akan
dibandingkan untuk diketahui kontrol logika fuzzy mana yang memiliki waktu
terbaik untuk sampai pada lahan parkir yang sudah ditentukan.
a. Kontrol Logika Fuzzy Yang Pertama (“bwdtruck.fc”, Labview 7.1)
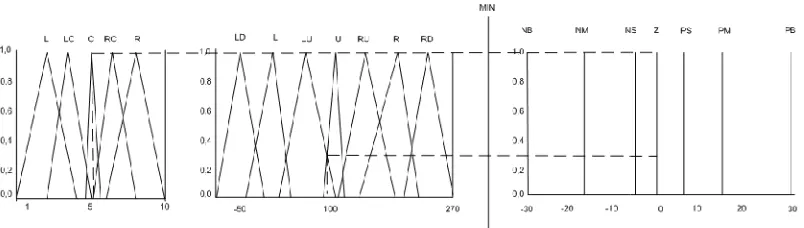
Pada perancangan kontrol logika fuzzy yang pertama ini akan dijelaskan
Gambar 3.2. Membership functions untuk posisi mobil
Gambar 3.3.Membership functions untuk orientasi mobil
Setelah ditentukan membership functions-nya maka akan di buat aturan
fuzzy untuk dimasukkan kedalam aturan fuzzy yang terdapat didalam
labview. Dari aturan fuzzy ini dapat di analisa waktu dan step untuk mobil
sampai pada lahan parkir yang sudah ditentukan. Aturan fuzzy dapat
dilihat pada tabel 3.2.
Tabel 3.2. Aturan fuzzy modul backward kontrol logika fuzzy 1
Orientasi Mobil
Tabel 3.3 Aturan fuzzy modul forward kontrol logika fuzzy 1
Orientasi Mobil
b. Kontrol Logika Fuzzy Yang Kedua
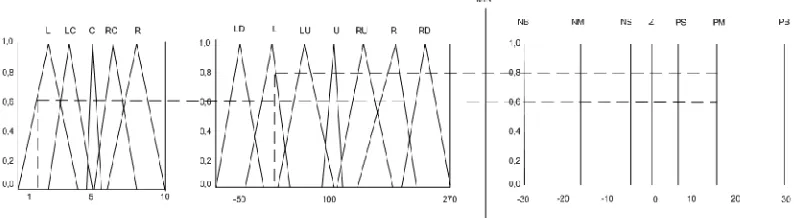
Pada perancangan kontrol logika fuzzy yang kedua ini akan dijelaskan
Gambar 3.5. Membership functions untuk posisi mobil
Gambar 3.6. Membership functions untuk orientasi mobil
Setelah ditentukan membership functions-nya maka akan di buat aturan
fuzzy untuk dimasukkan kedalam aturan fuzzy yang terdapat didalam
labview. Dari aturan fuzzy ini dapat di analisa waktu dan step untuk mobil
sampai pada lahan parkir yang sudah ditentukan. Aturan fuzzy dapat
dilihat pada tabel 3.3.
Tabel 3.4. Aturan fuzzy modul backward kontrol logika fuzzy 2
Orientasi Mobil
Tabel 3.5 Aturan fuzzy modul forward kontrol logika fuzzy 2
Orientasi Mobil
Fuzzy inference ini berfungsi untuk mengetahui nilai maximum dan
minimum dari setiap membership function. Dalam menentukan fuzzy inference
Fuzzy Inference Untuk Kontrol Logika Fuzzy 1
Negatif Big (NB)
Proses fuzzy inference untuk arah steering negatif big sebagai berikut.
Ifposisi mobil = Right Center (RC)
And orientasi mobil = Left Down (LD)
Then steering mobil= Negative Big (NB)
Gambar 3.8 Penentuan arah steering mobil untuk negatif big kontrol logika
fuzzy 1
Negatif Medium (NM)
Proses fuzzy inference untuk arah steering negatif medium sebagai
berikut.
If posisi mobil= Right (R)
And orientasi mobil = Right Up (RU)
Gambar 3.9 Penentuan arah steering mobil untuk negatif medium kontrol
logika fuzzy 1
Negatif Small (NS)
Proses fuzzy inference untuk arah steering negatif small sebagai
berikut.
Ifposisi mobil = LeftCenter (LC)
And orientasi mobil = Left (L)
Then steering mobil= Negatif Small (NS)
Gambar 3.10 Penentuan arah steering mobil untuk negatif small kontrol
Zero (Z)
Proses fuzzy inference untuk arah steering negatif big sebagai berikut.
Ifposisi mobil = Center (C)
And orientasi mobil = Up (U)
Then steering mobil = Zero (Zero)
Gambar 3.11 Penentuan arah steering mobil untuk zero kontrol logika fuzzy
1
Positif Small(PS)
Proses fuzzy inference untuk arah steering positif small sebagai
berikut.
Ifposisi mobil = Center (C)
And orientasi mobil = Right Up (RU)
Gambar 3.12 Penentuan arah steering mobil untuk positif small kontrol
logika fuzzy 1
Positif Medium (PM)
Proses fuzzy inference untuk arah steering positif medium sebagai
berikut.
If vehicle position = Left (L)
And vehicle orientation = Left Up (LU)
Then steering angle = Positif Medium (PM)
Gambar 3.13 Penentuan arah steering mobil untuk positif medium kontrol
Positif Big (PB)
Proses fuzzy inference untuk arah steering positif big sebagai berikut.
If vehicle position = Left (L)
And vehicle orientation = Right (R)
Then steering angle = Positif Big (PB)
Gambar 3.14 Penentuan arah steering mobil untuk positif big kontrol logika
fuzzy 1
Fuzzy Inference Untuk Kontrol Logika Fuzzy 2
Negatif Big (NB)
Proses fuzzy inference untuk arah steering negatif big sebagai berikut.
Ifposisi mobil = Left Center (LC)
And orientasi mobil = Left Down (LD)
Gambar 3.15 Penentuan arah steering mobil untuk negatif big kontrol
Negatif Medium (
Proses fuzzy
berikut.
If posisi mobil
And orientasi mobil
Then steering
Gambar 3.16 Penentuan arah steering
Gambar 3.15 Penentuan arah steering mobil untuk negatif big kontrol
fuzzy 2
Negatif Medium (NM)
Proses fuzzy inference untuk arah steering negatif medium
posisi mobil= Left Center (LC)
orientasi mobil = Left (L)
steering mobil= Negatif Medium (NM)
Gambar 3.16 Penentuan arah steering mobil untuk negatif medium kontrol
logika fuzzy 2
Gambar 3.15 Penentuan arah steering mobil untuk negatif big kontrol logika
negatif medium sebagai
Zero (Z)
Proses fuzzy inference untuk arah steering negatif big sebagai berikut.
Ifposisi mobil =
And orientasi mobil =
Then steering mobil =
Gambar 3.17 Penentuan arah
Positif Medium (
Proses fuzzy
berikut.
If vehicle position = Lef
And vehicle orientation =
Then steering angle
Proses fuzzy inference untuk arah steering negatif big sebagai berikut.
posisi mobil = Center (C)
orientasi mobil = Up (U)
steering mobil = Zero (Zero)
bar 3.17 Penentuan arah steering mobil untuk zero kontrol logika fuzzy
2
Positif Medium (PM)
Proses fuzzy inference untuk arah steering positif medium
vehicle position = Left (L)
vehicle orientation = Left (L)
steering angle = Positif Medium (PM)
Proses fuzzy inference untuk arah steering negatif big sebagai berikut.
steering mobil untuk zero kontrol logika fuzzy
Gambar 3.18 Penentuan arah steering mobil untuk positif medium kontrol
logika fuzzy 2
Positif Big (PB)
Proses fuzzy inference untuk arah steering positif big sebagai berikut.
If vehicle position = Center (L)
And vehicle orientation = Right Down (RD)
Then steering angle = Positif Big (PB)
Gambar 3.19 Penentuan arah steering mobil untuk positif big kontrol logika
3.4 Perancangan Aturan Logika Fuzzy Pada Labview
Perancangan aturan logika fuzzy pada labview memiliki bagian-bagian sebagai
berikut.
1. Project Manager berfungsi untuk membuat aturan logika fuzzy.
2. Fuzzy set-editor berfungsi untuk membuat atau mengubah membership
function.
3. Rulebase-editor berfungsi untuk membuat atau mengubah aturan fuzzy
atau fuzzy rule sets.
Untuk merancang aturan logika fuzzy akan di jelaskan melalui langkah-langkah
berikut ini.
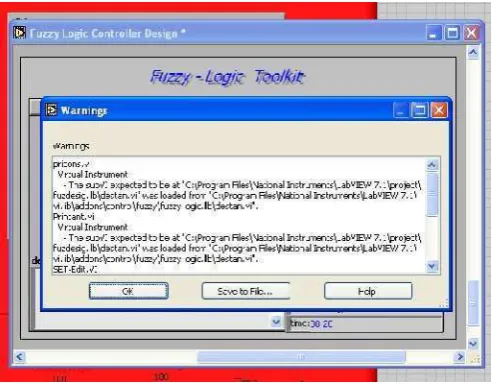
a. Pilih tools >> pilih fuzzy logic controller design
b. Setelah memilih fuzzy logic controller design maka akan keluar tampilan
seperti gambar 3.21ini. Lalu klik ok untuk memulai membuat aturan logika
fuzzy pada labview.
Gambar 3.21 Tampilan awal dari project manager
c. Untuk memulai membuat aturan logika fuzzy klik file >>new.
d. Setelah klik new maka akan keluar tampilan membership function yang
baru seperti gambar 3.23.
Gambar 3.23Tampilan set-editor
e. Setelah membuat membership function baru, selanjutnya membuat aturan
logika fuzzy. Untuk membuat aturan logika fuzzy klik quit lalu langsung
Gambar 3.24 Tampilan rulebase-editor
f. Banyaknya aturan logika fuzzy, tergantung dari banyaknya masukan dan
keluaran yang di buat pada set-editor (membership function)seperti gambar
3.24. Setelah membuat aturan logika fuzzy klik quit untuk langkah
selanjutnya yaitu menyimpan data logika fuzzy yang dibuat. Setelah klik
quit maka akan menuju tampilan project manager. Untuk menyimpan data
Gambar 3.25 Tampilan project manager
g. Setelah menyimpan data logika fuzzy yang sudah dibuat, maka saatnya
menguji aturan logika fuzzy pada simulasi parkir mobil otomatis. Sebelum
keluar dari project manager, untuk mengubah atau mengedit aturan fuzzy
yang sudah dibuat klik edit >> set-editor atau rulebase-editor. Set-editor
berfungsi untuk mengubah membership function yang sudah dibuat, dan
rulebase-editor berfungsi untuk mengubah aturan fuzzy yang sudah dibuat.
BAB IV
PENGUJIAN DAN ANALISIS
Pada bab ini dijelaskan tentang simulasi tentang performansi fuzzy rule
sets yang sudah dijelaskan pada bab sebelumnya. Pada pengujian ini
disimulasikan agar dapat mengetahui performansi kontrol logika fuzzy manakah
yang memiliki waktu terbaik untuk sampai pada lahan parkir yang sudah tentukan
ini.Maka dari itu saya melakukan 5 percobaan dengan posisi mobil, sudut dan
tempat parkir yang berbeda untuk mengetahui performansi dari ketiga kontrol
logika fuzzy tersebut.
4.1 Percobaan Simulasi Pertama
a. Kecepatan Waktu Mobil Dalam Proses Parkir
Kecepatan dalam waktu parkir ini bertujuan untuk mengetahui
seberapa cepat waktu mobil dalam melakukan proses parkir. Pada
percobaan pertama dengan menempatkan mobil pada inisial posisi yaitu
x=1.5, y=5, ᴓ= 60o dan tempat parkir yang dituju ada di posisi 5. Dengan
melakukan percobaan seperti ini didapat performansi kontrol logika fuzzy
Gambar 4.1 Simulasi labview pertama (1.5, 5, 60o)
Tabel 4.1 Hasil simulasi dari percobaan pertama
Inisial Posisi Kontrol Logika Fuzzy 1 Kontrol Logika Fuzzy 2
Time Step Time Step
x= 1.5 y= 5 ᴓ= 60o
Target tempat parkir = 5
4,709 detik 48 step 2,904 detik 30 step
b. Nilai keluaran steering angle
Nilai keluaran steering angle ini bertujuan untuk mengetahui
berapa derajat mobil menggerakan steering mobil pertama kali pada saat
akan melakukan parkir otomatis. Cara mengetahuinya menggunakan
Kontrol Logika Fuzzy 1
Dalam mencari nilai steering angle dapat dilakukan dengan cara
menentukan nilai max-min pada posisi mobil dan orientasi mobil lalu
memasukannya kedalam persamaan berikut.
Ifposisi mobil= 1,5 cm (L)
And orientasi mobil = 60o(LU)
Then steering mobil = Positif Medium (PM)
Gambar 4.2 Grafik percobaan 1 dengan kontrol logika fuzzy 1
= . . ( )
( ) ………(4.1)
Keterangan :
θ= Sudut keluaran
θ1 = Sudut terkecil
θ2 = Sudut terbesar
V (rule 1) = Nilai max
Dengan diketahui
mobilmaka didapat hasil seperti ini.
=
Jadi, pada
13,3o(positif medium).
Kontrol Logika Fuzzy 2
Pada kontrol
dari steering
cara menentukan
lalu memasukannya kedalam persamaan berikut.
Ifposisi mobil
And orientasi mobil =
Then steering mobil =
Gambar 4.3 Grafik
Dengan mengetahui
mobil maka didapat hasil seperti ini.
=
diketahui persamaan untuk mencari nilai keluaran
mobilmaka didapat hasil seperti ini.
= . , ., = , = , °
Jadi, pada saat pertama kali mobil mengarahkan steering
positif medium).
Kontrol Logika Fuzzy 2
Pada kontrol logika fuzzy 2 untuk dapat melihat berapa
steering angle pada mobil pada saat melakukan
menentukan nilai max-min pada posisi mobil dan
lalu memasukannya kedalam persamaan berikut.
posisi mobil = 1,5 cm (L)
orientasi mobil = 60o (LU)
steering mobil = Positif Big (PB)
Gambar 4.3 Grafik percobaan 1 dengan kontrol logika fuzzy 2
Dengan mengetahui persamaan untuk mencari nilai keluaran
mobil maka didapat hasil seperti ini.
= . , . ,, , = , = °
nilai keluaran steering
mengarahkan steering itu bernilai
berapa nilai keluaran
melakukan parkir dengan
mobil dan orientasi mobil
percobaan 1 dengan kontrol logika fuzzy 2
Jadi, pada
30o(positif big).
Gambar 4.4 Hasil simulasi percobaan 1 dengan kontrol logik Jadi, pada saat pertama kali mobil mengarahkan steering
positif big).
asil simulasi percobaan 1 dengan kontrol logik
garahkan steering itu bernilai
Gambar 4.5 Hasil simulasi percobaan 1 dengan kontrol logika fuzzy 2
Percobaan pertama ini dapat dilihat pada tabel 4.1 menunjukan bahwa
kontrol logika fuzzy ke-2 memiliki performansi yang lebih baik dari
kontrol logika fuzzy yang lainnya.Karena bisa dilihat durasi waktu dan
4.2 Percobaan Simulasi Kedua
a. Kecepatan Waktu Mobil Dalam Proses Parkir
Hasil kecepatan dalam waktu parkir ini bertujuan untuk
mengetahui seberapa cepat waktu mobil dalam melakukan proses parkir.
Pada percobaan simulasi kedua dengan menempatkan inisial posisi x= 3,
y= 2, dan ᴓ= 120o dan tempat parkir berada pada posisi 5. Dengan
melakukan percobaan kedua ini agar dapat mengetahui kondisi kontrol
logika fuzzy jika diberikan inisial posisi yang berbeda dapat dilihat pada
tabel 4.2.
Tabel 4.2 Hasil simulasi dari percobaan kedua
Inisial Posisi Kontrol Logika Fuzzy 1 Kontrol Logika Fuzzy 2
Time Step Time Step
x= 3 y= 2 ᴓ= 120o
Target tempat parkir = 5
4,658detik 47 step 2,806 detik 29 step
b. Nilai keluaraan steering angle
Nilai keluaran steering angle ini bertujuan untuk mengetahui berapa
derajat mobil menggerakan steering mobil pertama kali pada saat akan
melakukan parkir otomatis. Cara mengetahuinya menggunakan metode
max-min dengan cara memotong kurva x dan β.
Kontrol Logika Fuzzy 1
Dalam mencari nilai steering angle dapat dilakukan dengan cara
menentukan nilai max-min pada posisi mobil dan orientasi mobil lalu
memasukannya kedalam persamaan berikut.
Ifposisi mobil = 3 cm (L)
And orientasi mobil = 120o (RU)
Gambar 4.7 Grafik percobaan 2 dengan kontrol logika fuzzy 1
Dengan mengetahui persamaan untuk mencari nilai keluaran steering
mobil maka didapat hasil seperti berikut.
= . , . ,
, , =
,
, = 24° ( )
Jadi, pada saat pertama kali mobil mengarahkan steering itu bernilai
24o(positif big).
Kontrol Logika Fuzzy 2
Pada kontrol logika fuzzy 2 pada percobaan 2 untuk dapat melihat
berapa nilai keluaran dari steering angle pada mobil pada saat
melakukan parkir dengan cara menentukan nilai max-min pada posisi
mobil dan orientasi mobil lalu memasukannya kedalam persamaan
berikut.
Ifposisi mobil = 3 cm (L)
And orientasi mobil = 120o (RU)
Gambar 4.8 Grafik percobaan 2 dengan kontrol logika fuzzy 2
Dengan mengetahui
mobil maka didapat hasil seperti ini.
=
Jadi, pada
15o(positif medium).
Gambar 4.8 Grafik percobaan 2 dengan kontrol logika fuzzy 2
Dengan mengetahui persamaan untuk mencari nilai keluaran
mobil maka didapat hasil seperti ini.
= . , . ,, , = , = 5°
Jadi, pada saat pertama kali mobil mengarahkan steering
positif medium).
Gambar 4.8 Grafik percobaan 2 dengan kontrol logika fuzzy 2
nilai keluaran steering
Gambar 4.10 Hasil simulasi percobaan 2 dengan kontrol logika fuzzy 2
Dapat dilihat pada
performansi yang
dengan memiliki
parkir yang sudah ditentukan.
4.3 Percobaan Simulasi ketiga
a. Kecepatan Waktu Mobil Dalam Proses Parkir
Pada percobaan
dari kontrol logika fuzzy
lebih baik dari
= 115odan tempat
4.3.
Gambar 4.10 Hasil simulasi percobaan 2 dengan kontrol logika fuzzy 2
dilihat pada tabel 4.2 bahwa kontrol logika fuzzy 2
performansi yang lebih baik dari kontrol logika fuzzy yang
memiliki waktu 2,806 detik dan 29 step untuk sampai
parkir yang sudah ditentukan.
Percobaan Simulasi ketiga
Waktu Mobil Dalam Proses Parkir
percobaan ketiga ini dilakukan untuk melihat apakah
kontrol logika fuzzy ke-2 ini masih memiliki tingkat performansi
baik dari kontrol logika fuzzy lainnya. Dengan posisi
dan tempat parkir yang dituju adalah no.4 dapat dilihat
Gambar 4.10 Hasil simulasi percobaan 2 dengan kontrol logika fuzzy 2
fuzzy 2 tetap memiliki
fuzzy yang lainnya yaitu
untuk sampai pada lahan
melihat apakah performansi
2 ini masih memiliki tingkat performansi yang
posisi x = 5, y = 4, ᴓ
Gambar 4.11 simulasi labview ketiga (5, 4, 115o)
Tabel 4.3 Hasil simulasi dari percobaan 3
Inisial Posisi Kontrol Logika Fuzzy 1 Kontrol Logika Fuzzy 2
Time Step Time Step
x= 5 y= 4 ᴓ= 115o
Target tempat parkir = 4
3,703 detik 38 step 1,605
detik 17 step
b. Nilai keluaran steering angle
Pada percobaan ketiga nilai keluaran steering angle ini bertujuan untuk
mengetahui berapa derajat mobil menggerakan steering mobil pertama kali
pada saat akan melakukan parkir otomatis. Cara mengetahuinya
Kontrol Logika Fuzzy 1
Dalam mencari nilai steering angle dapat dilakukan dengan cara
menentukan nilai max-min pada posisi mobil dan orientasi mobil lalu
memasukannya kedalam persamaan berikut.
Ifposisi mobil = 5 cm (C)
And orientasi mobil = 115o (RU)
Then steering mobil = Positif Small (PS)
Gambar 4.12 Grafik percobaan 3 dengan kontrol logika fuzzy 1
Dengan mengetahui persamaan untuk mencari nilai keluaran steering
mobil maka didapat hasil seperti berikut.
= . , .
, = , = 3,125° ( )
Jadi, pada saat pertama kali mobil mengarahkan steering itu bernilai
3,125o(positif small).
Kontrol Logika Fuzzy 2
Pada kontrol logika fuzzy 2 pada percobaan 3 untuk dapat melihat
berapa nilai keluaran dari steering angle pada mobil pada saat
mobil dan
berikut.
Ifposisi mobil
And orientasi mobil =
Then steering mobil =
Gambar 4.14 Grafik percobaan 3 dengan kontrol logika fuzzy 2
Dengan mengetahui
mobil maka didapat hasil seperti ini.
=
Jadi, pada
15o(positif medium).
mobil dan orientasi mobil lalu memasukannya kedalam
posisi mobil = 5 cm (C)
orientasi mobil = 115o (RU)
steering mobil = Positif Medium (PM)
Gambar 4.14 Grafik percobaan 3 dengan kontrol logika fuzzy 2
Dengan mengetahui persamaan untuk mencari nilai keluaran
mobil maka didapat hasil seperti ini.
= . , . , = , = 5°
Jadi, pada saat pertama kali mobil mengarahkan steering
positif medium).
memasukannya kedalam persamaan
Gambar 4.14 Grafik percobaan 3 dengan kontrol logika fuzzy 2
nilai keluaran steering
Gambar 4.16 Hasil simulasi percobaan 3
Pada percobaan ketiga
dibandingkan dengan
parkir sudah berubah.
tempat parkir no.4. Kontrol
Gambar 4.16 Hasil simulasi percobaan 3 dengan kontrol logika fuzzy 2
percobaan ketiga ini performansi kontrol logika fuzzy
dengan kontrol logika fuzzy yang lain walaupun
berubah. Pada percobaan 3 ini tempat parkir yang
no.4. Kontrol logika fuzzy hanya melakukan 1,605
dengan kontrol logika fuzzy 2
fuzzy 2 lebih baik
walaupun kondisi lahan
parkir yang di tuju yaitu
step. Dan kontrol logika fuzzy lainnya waktu menuju tempat parkir lebih dari
kontrol logika fuzzy 2.
4.4 Percobaan Simulasi keempat
a. Kecepatan Waktu Dalam Proses Parkir
Pada percobaan keempat ini dilakukan untuk melihat apakah performansi
dari kontrol logika fuzzy ke-2 ini masih memiliki tingkat performansi yang
lebih baik dari kontrol logika fuzzy lainnya. Dengan posisi x = 3, y = 4, ᴓ
= 45odapat dilihat pada tabel 4.4.
Tabel 4.4 Hasil simulasi dari percobaan 4
Inisial Posisi Kontrol Logika Fuzzy 1 Kontrol Logika Fuzzy 2
Time Step Time Step
x= 3 y= 4 ᴓ= 45o
Target tempat parkir = 6
4,401
detik 45 step
4,206
detik 43 step
b. Nilai keluaran steering angle
Pada percobaan 4 nilai keluaran steering angle ini bertujuan untuk
mengetahui berapa derajat mobil menggerakan steering mobil pertama kali
pada saat akan melakukan parkir otomatis. Cara mengetahuinya
menggunakan metode max-min dengan cara memotong kurva x dan β.
Kontrol Logika Fuzzy 1
Dalam mencari nilai steering angle dapat dilakukan dengan cara
menentukan nilai max-min pada posisi mobil dan orientasi mobil lalu
memasukannya kedalam persamaan.
Ifposisi mobil = 3 cm (L)
And orientasi mobil = 45o (L)
Then steering mobil = Positif Small (PS)
Dengan mengetahui
mobil maka didapat hasil seperti berikut.
=
Jadi, pada
2,5o(positif small).
Kontrol Logika Fuzzy 2
Pada kontrol
Gambar 4.19 Grafik percobaan 3 dengan kontrol logika fuzzy 2 Dengan mengetahui persamaan untuk mencari nilai keluaran
mobil maka didapat hasil seperti berikut.
= . , . ,, , = , = ,5°
Jadi, pada saat pertama kali mobil mengarahkan steering
positif small).
Kontrol Logika Fuzzy 2
Pada kontrol logika fuzzy 2 pada percobaan 4 untuk
berapa nilai keluaran dari steering angle pada mobil
melakukan parkir dengan cara menentukan nilai
max-mobil dan orientasi max-mobil lalu memasukannya kedalam
posisi mobil = 3 cm (L)
orientasi mobil = 45o (LU)
steering mobil = Positif Medium (PM)
Gambar 4.19 Grafik percobaan 3 dengan kontrol logika fuzzy 2
nilai keluaran steering
mengarahkan steering itu bernilai
untuk dapat melihat
pada mobil pada saat
-min pada posisi
memasukannya kedalam persamaan
Dengan mengetahui
mobil maka didapat hasil seperti ini.
=
Jadi, pada
15o(positif medium).
Gambar 4.20 Hasil simulasi percobaan 4 dengan kontrol logika fuzzy 1 Dengan mengetahui persamaan untuk mencari nilai keluaran
mobil maka didapat hasil seperti ini.
= . , . ,, , = ,, = 5°
pada saat pertama kali mobil mengarahkan steering
positif medium).
Gambar 4.20 Hasil simulasi percobaan 4 dengan kontrol logika fuzzy 1 nilai keluaran steering
mengarahkan steering itu bernilai
Gambar 4.21 Hasil simulasi percobaan 4 dengan kontrol logika fuzzy 2
Di percobaan 4 ini dengan
fuzzy 2 masih menunjukan
parkir 4,206 detik dan 43 step.
Gambar 4.21 Hasil simulasi percobaan 4 dengan kontrol logika fuzzy 2
dengan menempatkan posisi parkir di posisi 6,
menunjukan performansi yang baik dengan memiliki
parkir 4,206 detik dan 43 step.
Gambar 4.21 Hasil simulasi percobaan 4 dengan kontrol logika fuzzy 2
posisi 6, kontrol logika
BAB V
KESIMPULAN DAN SARAN
5.1 Kesimpulan
Sesuai perancangan dan pengujian serta analisis dari simulasi parkir
otomatis dan perbandingan dari beberapa fuzzy rule module yang di bahas pada
penulisan tugas akhir ini, dapat diambil kesimpulan.
1. Kontrol logika fuzzy ke-2 lebih baik performansinya dari kontrol
logika fuzzy yang lainnya. Dari 4 kali percobaan kontrol logika
fuzzy ke-2 selalu menunjukan performansi yang baik, dengan
memiliki presentase waktu parkir yang dibutuhkan 46% lebih cepat
dari kontrol logika fuzzy yang lain.
2. Kontrol logika fuzzy ke-2 dalam melakukan parkir otomatis dari
posisi inisial sampai pada lahan parkir yang sudah ditentukan
memiliki kecepatan waktu yang sangat baik dalam proses parkir.
3. Pada percobaan pertama diketahui bahwa mobil yang
menggunakan kontrol logika fuzzy ke-2 untuk menuju lahan parkir
dari inisial posisi hanya butuh 30 step dan 2,904 detik. Pada
percobaan kedua pun sama, kontrol logika fuzzy ini menunjukan
performansi yang baik hanya membutuhkan waktu 32 step dan
3,205 detik. Pada percobaan 3 dan 4 kontrol logika fuzzy memiliki
performansi yang baik dengan memiliki waktu 1,605 detik,17 step
5.2 Saran
Untuk pengembangan dan peningkatan kinerja dari simulasi parkir
otomatis yang di buat ini, ada beberapa hal yang harus diperhatikan.
1. Menggunakan penghalang pada saat simulasi parkir, agar simulasi
parkir ini seperti pada keadaan sebenarnya.
2. Menambahkan grafik setiap pergerakkan steering angle pada mobil.