Nama Lengkap : Ipan Irwanto
Tempat, tanggal lahir : Jakarta, 17 Juli 1992 Jenis Kelamin : Laki-laki
Kewarganegaraan : Indonesia
Agama : Islam
Status : Belum Menikah
Alamat : Jl. Pondok cabe raya no. 15, Pamulang-Tangsel Telepon : 085715232099
Pendidikan Formal : Tahun 1997 – 2003 SDN Pondok Cabe Ilir III Tahun 2003 – 2006 SMPN 1 Ciputat
Tahun 2006 – 2009 SMAN 3 Ciputat Tahun 2009 – 2013 UNIKOM Bandung
Demikian daftar riwayat hidup ini saya buat dengan sebenar-benarnya
Bandung, 30 Agustus 2013
EVALUASI KINERJA ARSITEKTUR KONTROL FUZZY
PADA SIMULASI PARKIR MOBIL OTOMATIS MENGGUNAKAN
LABVIEW
Laporan ini disusun untuk memenuhi salah satu syarat dalam menempuh pendidikan program sarjana di Program Studi Teknik Elektro
IPAN IRWANTO 1.31.09.009
PROGRAM STUDI TEKNIK ELEKTRO
FAKULTAS TEKNIKDAN ILMU KOMPUTER
UNIVERSITAS KOMPUTER INDONESIA
BANDUNG
v Segala puji syukur penulis panjatkan kepada Tuhan Yang Maha Esa atas berkat, rahmat dan hidayahnya sehingga penulis dapat menyelesaikan laporan tugas akhir ini dengan judul “EVALUASI KINERJA ARSITEKTUR KONTROL FUZZY PADA SIMULASI PARKIR MOBIL OTOMATIS MENGGUNAKAN LABVIEW”.
Ilmu serta pengalaman baru dan berharga penulis peroleh dari pengerjaan tugas akhir ini. Serta penyelesaian laporan tugas akhir ini tidak terlepas dari bimbingan, arahan dan bantuan dari berbagai pihak baik yang secara langsung maupun secara tidak langsung. Atas terselesainya laporan ini penulis tidak lupa mengucapkan terima kasih kepada :
1. Kedua Orang Tua, adik tercinta dan keluarga atas semua dukungan yang telah di berikan dari mulai dengan doa, cinta dan kasih sayang yang senantiasa tercurah kepada penulis.
2. Bapak Ir. Eddy Suryanto Soegoto, M.Sc, sebagai Rektor UNIKOM Bandung. 3. Bapak Prof. Dr. Ir Denny Kurniadie, M.Sc., sebagai Dekan Fakultas Teknik
dan Ilmu Komputer UNIKOM Bandung.
4. Bapak Muhammad Aria, M.T, sebagai Ketua Program Studi Teknik Elektro UNIKOM Bandung dan sebagai Dosen Pembimbing Tugas Akhir.
vi Indonesia angkatan 2009.
7. Teman, saudara dan partner terbaik M. Aulia Rahman atas segala doa, dukungan, bantuan dan kerja sama, sampai dengan keadaan senang dan susah selalu tetap bersama.
8. Rekan-rekan seperjuangan mahasiswa Teknik Elektro 2009 UNIKOM, atas semangat dan motivasinya selama ini.
9. Sahabat-sahabat terbaik yang selalu memberi dukungan walaupun hanya dari jauh (Edo, Anto, Daud).
10.Dan untuk Debby Nurainy Kosasih atas segala support dan perhatiannya sehingga sangat memberi tambahan motivasi dan semangat.
Penulis menyadari bahwa dalam penyusunan laporan Tugas Akhir ini masih banyak kekurangan, namun demikian penulis berharap semoga laporan ini dapat bermanfaat bagi semua pihak. Amin.
Bandung, Agustus 2013
HALAMAN JUDUL LEMBAR PENGESAHAN
ABSTRAK ... Error! Bookmark not defined. ABSTRACT ... Error! Bookmark not defined. KATA PENGANTAR ... Error! Bookmark not defined. DAFTAR ISI ... vii DAFTAR GAMBAR ... ix DAFTAR TABEL... xi BAB IPENDAHULUAN
1.1. Latar Belakang... Error! Bookmark not defined. 1.2. Identifikasi Masalah ... Error! Bookmark not defined. 1.3. Rumusan Masalah ... Error! Bookmark not defined.2 1.4. Tujuan ... 2 1.5. Batasan Masalah ... 3 1.6. Metode Penelitian ... Error! Bookmark not defined. 1.7. Sistematika Penulisan ... Error! Bookmark not defined.4 BAB IILANDASAN TEORI
2.1. Logika Fuzzy ... 5 2.2. Himpunan Fuzzy ... Error! Bookmark not defined.5 2.3. Perbedaan Logika Tegas dan Himpunan Fuzzy ... Error! Bookmark not defined.7
2.4. Fungsi Keanggotaan ... Error! Bookmark not defined.8 2.5. Fuzzy Inference System ... Error! Bookmark not defined. 2.6. Permasalahan Dalam Parkir Otomatis ... Error! Bookmark not defined.12 2.7. Perangkat Lunak LabView ... Error! Bookmark not defined.13 BAB IIIPERANCANGAN SIMULASI
3.4.3. Rulebase-editor ... Error! Bookmark not defined. BAB IVPENGUJIAN DAN ANALISA HASIL UJICOBA
4.1. Hasil Ujicoba ... Error! Bookmark not defined.50 4.2. Ujicoba Pada Posisi Ramp Berbeda ... Error! Bookmark not defined.58 4.3. Analisa... Error! Bookmark not defined.59 4.3.1. Hasil Percobaan ... Error! Bookmark not defined.59 4.3.2.Mencari nilai keluaran dari arah steering angle ... Error! Bookmark not defined.60
BAB VPENUTUP
DAFTAR GAMBAR
BAB IILANDASAN TEORI
Gambar 2.1 logika tegas (a) dan himpunan fuzzy (b)Error! Bookmark not defined.7 Gambar 2.2 Kurva Linear Naik ... Error! Bookmark not defined.8
Gambar 2.3 Kurva Linear Turun ... 9
Gambar 2.4 Kurva Segitiga ... 9
Gambar 2.5 Kurva Trapesium ... 10
Gambar 2.7 Perancangan mobil dan lahan parkir ... 12
BAB III PERANCANGAN SIMULASI Gambar 3.1. Blok Diagram Sistem Kontrol Logika Fuzzy ... Error! Bookmark not defined.16 Gambar 3.2. Membership Function percobaan pertama untuk nilai (x, y) ... Error! Bookmark not defined.18 Gambar 3.3. Membership Function percobaan kedua untuk untuk nilai (x, y) ... 19
Gambar 3.4. Membership Function percobaan ketiga untuk untuk nilai (x, y) ... 20
Gambar 3.5. Membership Function percobaan keempat untuk nilai (x, y)... 21
Gambar 3.6. Membership Function percobaan kelima untuk nilai (x, y) ... 22
Gambar 3.7. Membership Function percobaan keenam untuk nilai (x, y) ... 23
Gambar 3.8. Membership Function percobaan ketujuh untuk nilai (x, y) ... 24
Gambar 3.9. Membership Function percobaan pertama untuk nilai (ᴓ) ... 25
Gambar 3.10. Membership Function percobaan kedua untuk nilai (ᴓ) ... 26
Gambar 3.11. Membership Function percobaan ketiga untuk nilai (ᴓ) ... 27
Gambar 3.12. Membership Function percobaan keempat untuk nilai (ᴓ) ... 28
Gambar 3.13. Membership Function percobaan kelima untuk nilai (ᴓ) ... 29
Gambar 3.14. Membership Function percobaan keenam untuk nilai (ᴓ) ... 30
Gambar 3.15. Membership Function percobaan ketujuh untuk nilai (ᴓ)... 31
Gambar 3.16. Membership Fuction percobaan pertama untuk nilai (θ) ... 32
Gambar 3.17. Membership Function percobaan kedua untuk nilai (θ) ... 33
Gambar 3.21. Membership Function percobaan keenam untuk nilai (θ) ... 37
Gambar 3.22. Membership Function percobaan ketujuh untuk nilai (θ) ... 38
Gambar 3.23. Penentuan arah steering angle untuk negative big ... 39
Gambar 3.24. Penentuan arah steering angle untuk negative medium ... 40
Gambar 3.25. Penentuan arah steering angle untuk negative small ... 40
Gambar 3.26. Penentuan arah steering angle untuk Zero ... 41
Gambar 3.27. Penentuan arah steering angle untuk positif small ... 41
Gambar 3.28. Penentuan arah steering angle untuk positif medium... 42
Gambar 3.29. Penentuan arah steering angle untuk positif big... 42
Gambar 3.30. Tampilan project manager ... 43
Gambar 3.31. Tampilan Fuzzy set-editor ... 43
Gambar 3.32. Tampilan dari vehicle-position... 44
Gambar 3.33. Tampilan dari vehicle-orientation ... 45
Gambar 3.34. Tampilan dari steering-angle ... 46
Gambar 3.35. Rulebase-editor 1 sampai 15 ... 48
Gambar 3.36. Rulebase-editor 15 sampai 29 ... 48
Gambar 3.37. Rulebase-editor 21 sampai 35 ... 49
BAB IVPENGUJIAN DAN ANALISA HASIL UJICOBA Gambar 4.1. Inisialisasi posisi awal mobil... 50
Gambar 4.2. Simulasi Labview ... 51
Gambar 4.3. Hasil pergerakan mobil, step dan waktu pada mf 1 ... 51
Gambar 4.4. Hasil pergerakan mobil, step dan waktu pada mf 2 ... 52
Gambar 4.5. Hasil pergerakan mobil, step dan waktu pada mf 3 ... 53
Gambar 4.6. Hasil pergerakan mobil, step dan waktu pada mf 4 ... 53
Gambar 4.7. Hasil pergerakan mobil, step dan waktu pada mf 5 ... 54
Gambar 4.8. Hasil pergerakan mobil, step dan waktu pada mf 6 ... 55
Gambar 4.9. Hasil pergerakan mobil, step dan waktu pada mf 7 ... 56
Gambar 4.10. Hasil pergerakan mobil, step dan waktu ramp 3 ... 58
DAFTAR TABEL
BAB II LANDASAN TEORI
Tabel 1. Fungsi keanggotaan pada bwdtruck module ... 17
Tabel 2. Aturan fuzzy pada bwdtruck ... 17
Tabel 3. Aturan fuzzy pada fwdtruck ... 18
BAB III PERANCANGAN SIMULASI Tabel 4. Nilai range untuk vehicle position pada percobaan 1 ... 19
Tabel 5. Nilai range untuk vehicle position pada percobaan 2 ... 20
Tabel 6. Nilai range untuk vehicle position pada percobaan 3 ... 20
Tabel 7. Nilai range untuk vehicle position pada percobaan 4 ... 21
Tabel 8. Nilai range untuk vehicle position pada percobaan 5 ... 22
Tabel 9. Nilai range untuk vehicle position pada percobaan 6 ... 23
Tabel 10. Nilai range untuk vehicle position pada percobaan 7 ... 24
Tabel 11. Nilai range untuk vehicle orientation pada percobaan 1 ... 25
Tabel 12. Nilai range untuk vehicle orientation pada percobaan 2 ... 26
Tabel 13. Nilai range untuk vehicle orientation pada percobaan 3 ... 27
Tabel 14. Nilai range untuk vehicle orientation pada percobaan 4 ... 28
Tabel 15. Nilai range untuk vehicle orientation pada percobaan 5 ... 29
Tabel 16. Nilai range untuk vehicle orientation pada percobaan 6 ... 30
Tabel 17. Nilai range untuk vehicle orientation pada percobaan 7 ... 31
Tabel 18. Nilai range untuk steering angle pada percobaan 1 ... 32
Tabel 19. Nilai range untuk steering angle pada percobaan 2 ... 33
Tabel 21. Nilai range untuk steering angle pada percobaan 4 ... 35
Tabel 22. Nilai range untuk steering angle pada percobaan 5 ... 36
Tabel 23. Nilai range untuk steering angle pada percobaan 6 ... 37
Tabel 24. Nilai range untuk steering angle pada percobaan 7 ... 38
Tabel 28. Metode Defuzzifikasi dengan center of grav ... 57
Tabel 29. Metode Defuzzifikasi dengan mean of max ... 58
Tabel 30. rule untuk setiap keluaran steering angle ... 61
Tabel 31. Nilai max-min vehicle position ... 61
Tabel 32. Nilai max-min vehicle orientation ... 61
Tabel 33. Nilai range dari setiap keluaran steering angle ... 62
Tabel 34. nilai untuk setiap keluaran steering angle ... 66
Tabel 35. rule untuk setiap keluaran steering angle ... 67
Tabel 36. Nilai max-min vehicle position ... 67
Tabel 37. Nilai max-min vehicle orientation ... 67
75
L.X.Wang. “Adaptive Fuzzy Sistem and Control”,pp.1-28,Engliwood
Cliffs,NJ:Prentice-Hall,1994.
T.-H. S. Li, S-J. Chang, “Autonomous Fuzzy Parking Control of a car-like
mobile robot,”IEEE Transaction on system, Man and Cybernetics, vol. 33,
pp.451-465, 2003.
A. Muhammad. “Design Of Type-2 Fuzzy Controller For Truck
Backer-Upper Problem”, Indonesia Computer University.
1
BAB I PENDAHULUAN
1.1. Latar Belakang
Seiring dengan pesatnya kemajuan pada bidang ilmu tekhnologi, banyak inovasi dalam pembuatan alat baru yang diciptakan agar dapat memudahkan pekerjaan seseorang. Dimana dalam era modernisasi saat ini, salah satu awal mula pengembangan dalam teknologi adalah dengan cara pembuatan simulasi terlebih dahulu.
Pembuatan simulasi untuk parkir mobil otomatis misalnya, dibutuhkan suatu simulasi terlebih dahulu sebelum bisa diaplikasikan secara langsung dalam keadaan sebenarnya. Agar bisa diminimalkan kesalahan-kesalahan yang terjadi pada saat melakukan proses parkir mobil kedalam sebuah simulasi terlebih dahulu, sehingga bisa mendekati keadaan ketika dimana saat memparkir mobil di keadaan sebenarnya.
1.2. Identifikasi Masalah
Berdasarkan latar belakang yang telah dikemukakan, maka dapat diidentifikasi permasalahan dalam tugas akhir ini, yaitu sebagai berikut.
Mencari alternatif dari beberapa perubahan pada membership function
yang digunakan untuk mengetahui kecepatan waktu mana yang lebih baik.
Mencari alternatif dari beberapa deffuzifikasi yang bisa digunakan untuk
mengetahui juga kecepatan mana yang lebih baik.
1.3. Rumusan Masalah
Rumusan masalah disini adalah sebagai berikut.
Bagaimana cara membuat perubahan untuk nilai membership function. Bagaimana cara membuat perubahan terhadap defuzzifikasi.
1.4. Tujuan
Tujuan dalam penulisan tugas akhir ini adalah.
Mencari suatu sistem simulasi alternatif dari beberapa percobaan
perubahan terhadap membership function.
Mencari suatu sistem simulasi alternatif dari beberapa defuzzifikasi yang
1.5. Batasan Masalah
Batasan masalah dalam penulisan tugas akhir ini adalah. Simulasi menggunakan LabVIEW.
Simulasi ini hanya melakukan proses parkir. Menggunakan metode logika fuzzy.
1.6. Metode Penelitian
Metoda penelitian yang dilakukan adalah eksperimental dengan tahapan sebagai berikut.
Studi Literatur
Pada metode ini, penulis mencari dan mengumpulkan data-data serta informasi dari berbagai sumber baik dari buku maupun internet, melakukan percakapan atau tanya jawab dengan para pakar/ahli yang berkaitan langsung dengan objek yang akan diteliti.
Perencanaan
Meliputi hal yang berkaitan dengan perancanaan pembuatan untuk simulasi.
Pengujian simulasi
Evaluasi
Melakukan evaluasi dari hasil yang sudah dilakukan selama dalam proses pengujian simulasi tersebut.
1.7. Sistematika Penulisan
Sistematika penulisan tugas akhir ini adalah sebagai berikut : Bab I Pendahuluan
Menguraikan latar belakang, rumusan masalah, tujuan, batasan masalah, metode penelitian dan sistematika penulisan.
Bab II Landasan Teori
Menjelaskan dasar teori mengenai logika fuzzy secara umum. Bab III Perancangan Simulasi
Menjelaskan tentang perancangan simulasi untuk perangkat lunak (software) yang akan dibuat.
Bab IV Pengujian dan Analisa Hasil Uji Coba
Menjelaskan hasil uji coba dari simulasi yang telah dibuat. Bab V Penutup
5
Pada bab ini berisi tentang teori mengenai permasalahan yang akan dibahas dalam pembuatan tugas akhir ini. Secara garis besar teori penjelasan akan dimulai dari definisi logika fuzzy, pengenalan Labview dan Ms. Visio.
2.1. Logika Fuzzy
Teori himpunan logika fuzzy dikembangkan oleh Prof. Lofti Zadeh pada tahun 1965. Ia berpendapat bahwa logika benar dan salah dari logika Boolean tidak dapat mengatasi masalah gradasi yang berada pada dunia nyata. Untuk mengatasi masalah gradasi yang tidak terhingga tersebut, Zadeh mengembangkan sebuah himpunan fuzzy.
Tidak seperti logika Boolean, logika fuzzy mempunyai nilai yang kontinyu. Logika fuzzy dinyatakan dalam derajat dari suatu keanggotaan dan derajat kebenaran. Oleh sebab itu, sesuatu dapat dikatakan sebagian benar dan sebagian salah pada waktu yang sama.
2.2. Himpunan Fuzzy
Pada himpunan tegas (crisp), nilai keanggotaaan suatu item x dalam suatu
himpunan A, yang sering ditulis dengan μA [x], memiliki 2 kemungkinan, yaitu :
Satu (1), yang berarti bahwa suatu item menjadi anggota dalam suatu
himpunan, atau
Nol (0), yang berarti bahwa suatu item tidak menjadi anggota dalam suatu
Pada penggunaan himpunan crisp, adanya perubahan kecil saja pada suatu nilai mengakibatkan perbedaan kategori yang cukup signifikan. Himpunan fuzzy digunakan untuk mengantisispasi hal tersebut. Seberapa besar ekstensinya dalam himpunan tersebut dapat dilihat pada nilai keanggotaannya. Kalau pada himpunan crisp, nilai keanggotaan hanya ada 2 kemungkinan, yaitu 0 atau 1, pada himpunan fuzzy nilai keanggotaan terletak pada rentang 0 sampai 1. apabila nilai keanggotaan
fuzzy μ A[x] =0 berarti x tidak menjadi anggota himpunan A, demikian pula apabila
x memiliki nilai keanggotaan μA[x] = 1 berarti x menjadi anggota penuh himpunan
A.
Himpunan fuzzy memiliki 2 atribut, yaitu :
a. Linguistik, yaitu penamaan suatu grup yang mewakili suatu keadaan atau kondisi tertentu dengan menggunakan bahasa alami, seperti : MUDA, PAROBAYA, TUA.
b. Numeris, yaitu suatu nilai (angka) yang menunjukkan ukuran dari suatu variabel seperti 40, 25, 50, dsb.
Ada beberapa hal yang perlu diketahui dalam memahami sistem fuzzy, yaitu : a. Variabel fuzzy
Variabel fuzzy merupakan variabel yang hendak dibahas dalam suatu sistem fuzzy. Contoh: umur, temperatur, permintaan, dsb.
b. Himpunan fuzzy
Contoh: Variabel umur, terbagi menjadi 3 himpunan fuzzy, yaitu: MUDA, PAROBAYA, TUA.
c. Semesta pembicaraan
Semesta pembicaraan adalah keseluruhan nilai yang diperbolehkan untuk dioperasikan dalam suatu variabel fuzzy.
Contoh: Semesta pembicaraan untuk variabel umur: [0 + ~] d. Domain
Domain himpunan fuzzy adalah keseluruhan nilai yang diijinkan dalam semesta pembicaraan dan boleh dioperasikan dalam suatu himpunan fuzzy.
Contoh:
· MUDA = [0, 45] · TUA = [45, + ~)
2.3. Perbedaan Logika Tegas dan Himpunan Fuzzy
Perbedaan antara kedua jenis logika ini adalah jika logika tegas memiliki nilai 0 dan 1, sedangkan himpunan fuzzy memiliki nilai diantara 0 hingga 1. Secara grafik perbedaan logika fuzzy dan logika tegas ditunjukan pada gambar 2.1.
(a) (b)
Pada gambar 2.1 (a) nilai x = 9, 8, 7 atau nilai antara 0 – 10 dikatakan salah. Sedangkan, pada gambar 2.1 (b) apabila x lebih dari atau sama dengan 10 dikatakan benar yaitu dengan nilai y = 1, sebaliknya nilai x kurang dari 10 adalah salah yaitu jika y = 0. Maka angka 9, 8, 7 dan seterusnya sampai 0 dikatakan nilai diantara benar atau salah.
2.4. Fungsi Keanggotaan
Fungsi keanggotaan (membership function) adalah suatu kurva yang menunjukkan pemetaan titik-titik input data ke dalam nilai keanggotaannya(derajat keanggotaan). Ada beberapa fungsi yang bisa digunakan, antara lain :
a. Representasi Linier
Pada pemetaan linear, pemetaan input ke derajat keanggotaannya
digambarkan sebagai suatu garis lurus. Ada 2 keadaaan himpunan fuzzy yang
linear. Pertama, kenaikan himpunan dimulai pada nilai domain yang memiliki
derajat keanggotaan. Lalu bergerak ke kanan menuju ke nilai domain yang
memiliki derajat keanggotaan lebih tinggi, dibawah ini menunjukan grafik dari
kurva linier naik :
Fungsi Keanggotaan :
Kedua, merupakan kebalikan yang pertama. Garis lurus dimulai dari nilai domain dengan derajat keanggotaan tertinggi pada sisi kiri, kemudian bergerak menurun ke nilai domain yang memiliki derajat keanggotaan lebih rendah. Dibawah ini menunjukan grafik dari kurva linier turun :
Gambar 2.3 Kurva Linear Turun
Fungsi keanggotaan :
b
b. Representasi Kurva Segitiga
Kurva segitiga pada dasarnya merupakan gabungan antara 2 garis linear. Dibawah ini menunjukan grafik dari kurva segitiga :
Fungsi Keanggotaan :
c. Representasi Kurva Trapesium
Kurva trapesium pada dasarnya seperti bentuk segitiga, hanya saja ada beberapa titik yang memiliki nilai keanggotaan 1. Dibawah ini menunjukan grafik dari kurva trapesium :
Gambar 2.5 Kurva Trapesium Fungsi Keanggotaan :
2.5. Fuzzy Inference System
Salah satu metode untuk penalaran (Fuzzy Inference System) adalah Metode
Mamdani (Max-Min). Metode ini diperkenalkan oleh Ebrahim Mamdani pada tahun
1975. untuk mendapatkan output, diperlukan 4 tahap. Dapat digambarkan dengan block
Gambar 2.6 Tahapan Logika Fuzzy
Keterangan pada gambar 2.8 dapat dilihat pada penjelasan dibawah ini : pembentukan himpunan fuzzy
Pada Metode Mamdani, baik variabel input maupun variabel output dibagi menjadi satu atau lebih himpunan fuzzy.
fuzzification (fuzzifikasi)
Proses memetakan crisp input (nilai tegas) kedalam himpunan fuzzy. Hasil dari proses ini berupa fuzzy input.
rule evaluation (rule evaluasi)
defuzzification (penegasan)
Input dari proses defuzzifikasi adalah suatu himpunan fuzzy yang diperoleh dari komposisi aturan-aturan fuzzy, sedangkan output yang dihasilkan merupakan suatu bilangan pada domain himpunan fuzzy tersebut. Sehingga jika diberikan suatu himpunan fuzzy dalam range tertentu, maka harus dapat diambil suatu nilai crisp tertentu sebagai output.
2.6. Permasalahan Dalam Parkir Otomatis
Pada simulasi ini posisi truk ditentukan oleh 3 variable ᴓ, x dan y. Dimana variable ᴓ merupakan sudut orientasi , dan untuk pasangan koordinat (x,y) merupakan sebagai posisi dimana mobil akan memulai untuk melakukan proses
parkir. Sedangkan output dari simulasi ini yaitu θ, sudut kemudi (steering angle)
yang digunakan untuk mengontrol mobil tersebut agar bisa mencapai posisi parkir yang ditentukan secara otomatis.
Mobil akan melakukan gerak maju atau mundur dari rules dan membership function yang telah ditentukan. Sehingga akan menghasilkan kontrol mobil dengan sudut kemudi yang tepat, agar mobil bisa mencapai posisi awal parkir yang telah ditentukan.
Untuk mempermudah, pada simulasi sistem kontrol ini diasumsikan untuk masukan ᴓ berada pada range [-900 , -2700]. Sedangkan untuk masukan x dan y berada pada range [0,10] dan untuk keluaran berada pada range [-30 , 30].
Karena sistem ini masih menggunakan simulasi, jadi harus mengetahui terlebih dahulu dinamika prosedur untuk pergerakan maju-mundurnya mobil. Dan pada sistem ini menggunakan kinematika sebagai berikut.
x(t+1) = x(t) –cos ᴓ t + θ t –sin θ t + ᴓ t ……… pers. .
y(t+1) = y(t) –sin ᴓ t + θ t –cos θ t + ᴓ t ……… pers. .
ᴓ t+ = ᴓ t – sin -1 ……… pers. .
Dimana, (x , y) = koordinat bagian belakang mobil sebagai poros titik tengah b = panjang dari mobil tersebut
2.7. Perangkat Lunak LabView
LabVIEW adalah salah satu bahasa pemograman berbasis grafis atau blok diagram, sebagai pengganti teks dalam membuat aplikasi. LabVIEW juga merupakan aplikasi program development, yang mirip dengan sistem Development C atau BASIC.
Program LabVIEW disebut dengan Virtual Instrumen (VI) karena beberapa tampilan dan operasi pada program LabVIEW menyerupai suatu instrument seperti osiloskop dan multimeter. Setiap VI menggunakan fungsi-fungsi yang memanipulasi input dari user interface atau sumber lain dan menampilkan informasi tersebut atau memindahkan informasi tersebut ke file/ komputer lain.
1. Front panel, digunakan untuk mengatur tampilan program (user interface).
Gambar 2.8 Tampilan Front Panel pada LabVIEW
2. Block diagram, terdiri dari sumber-sumber grafik yang mendefinisikan fungsi-fungsi dari VI, serta pada block diagram harus disusun agar bekerja sesuai dengan aksi yang dilakukan pada front panel.
3. Control pallet merupakan tempat beberapa control dan indikator pada front panel, control pallete hanya tersedia di front panel, untuk menampilkan control pallete dapat dilakukan dengan mengklik windows >> show control pallete atau klik kanan pada front panel. Contoh tampilan dari control pallete ditunjukkan pada
gambar 2.3.
Gambar 2.10 Control pallet
4. Function pallet digunakan untuk membangun sebuah blok diagram,fungction pallete hanya tersedia pada blok diagram, untukmenampilkannya dapat dilakukan dengan
mengklik windows >> show control pallete atau klik kanan pada lembar kerja blok
diagram. Contoh tampilan dari function pallete ditunjukkan pada gambar 2.4.
16
Pada perancangan simulasi ini, dibuat untuk mengetahui kinerja dari membership function yang berbeda setiap inputannya. Sehingga bisa mengetahui kecepatan dan step yang baik dari setiap membership fuction yang telah dirancang. 3.1. Kontrol Logika Fuzzy
Kontrol logika fuzzy pada perancangan ini menggunakan aturan backward bwdtruck dan forward fwdtruck yang terdapat pada LabVIEW. Didalam bwdtruck dan fwdtruck tersebut masing-masing berisi 35 rules. Untuk blok diagramnya akan ditunjukan pada gambar di bawah ini.
Pada aturan bwdtruck dan fwdtruck ini terdapat 2 masukan, yaitu x untuk
posisi dari mobil dan ᴓ untuk orientasi dari mobil. Sedangkan untuk keluaran aturan
bwdtruck dan fwdtruck ini hanya terdapat 1 keluaran yaitu θ sebagai steering angle pada mobil. Setiap keluaran tersebut diproses pada select direction, lalu select direction akan memilih apakah mobil akan bergerak maju atau mundur sesuai dengan aturan yang ada pada backward dan forward yang telah ditentukan. Untuk keluaran dari select direction yaitu steering angle dan arah mobil.
Untuk fungsi keanggotaan dan aturan fuzzy inference system pada bwdtruck module dan fwdtruck module akan dijelaskan pada tabel dibawah ini.
Tabel 1. Fungsi keanggotaan pada bwdtruck module
x, y (posisi mobil) m ᴓ (arah mobil) 0 Θ (steering angle) 0
Tabel 3. Aturan fuzzy pada fwdtruck x, y Posisi (m)
L LC C RC R
ᴓ Sudut Orientasi
( 0 )
LD PB PB PM PM PM
L PB PB PM PS PS
LU PM PM PS NS NS
U PM PM Z NM NM
RU PS PS NS NM NM
R NS NS NM NM NM
RD NB NM NM NB NB
3.2. Membership Function
Untuk membership function bwdtruck ini akan diberikan 7 alternatife percobaan dalam bentuk membership function yang berbeda. Dan akan dijelaskan pada gambar-gambar dibawah ini.
1. Alternative Membership Fuction untuk nilai (x, y). a. Percobaan 1 .
Jika diketahui range untuk vehicle position pada percobaan 1 akan dijelaskan pada tabel dibawah ini:
Tabel 4. Nilai range untuk vehicle position pada percobaan 1 Vehicle
Position
Range (m)
Left Bottom Left Top Right Top Right Bottom
L 0 0 1 4
LC 3 4 4 5
L 4,5 5 5 5,5
RC 5 6 6 7
R 6 9 10 10
b. Percobaan 2 .
Tabel 5. Nilai range untuk vehicle position pada percobaan 2 Vehicle
Position
Range (m)
Left Bottom Left Top Right Top Right Bottom
L 0 0 1 3
Gambar 3.4. Membership Function percobaan ketiga untuk untuk nilai (x, y) Jika diketahui range untuk vehicle position pada percobaan 3 akan dijelaskan pada tabel dibawah ini:
Tabel 6. Nilai range untuk vehicle position pada percobaan 3 Vehicle
Position
Range (m)
Left Bottom Left Top Right Top Right Bottom
L 0 0 1 4
LC 3 4 4 5
L 4,5 5 5 5,5
RC 5 6 6 7
d. Percobaan 4.
Gambar 3.5. Membership Function percobaan keempat untuk nilai (x, y) Jika diketahui range untuk vehicle position pada percobaan 4 akan dijelaskan pada tabel dibawah ini:
Tabel 7. Nilai range untuk vehicle position pada percobaan 4 Vehicle
Position
Range (m)
Left Bottom Left Top Right Top Right Bottom
L 0 0 1 4
LC 3 4 4 5
L 4,5 5 5 5,5
RC 5 6 6 7
e. Percobaan 5.
Gambar 3.6. Membership Function percobaan kelima untuk nilai (x, y) Jika diketahui range untuk vehicle position pada percobaan 5 akan dijelaskan pada tabel dibawah ini:
Tabel 8. Nilai range untuk vehicle position pada percobaan 5 Vehicle
Position
Range (m)
Left Bottom Left Top Right Top Right Bottom
L 0 0 1 3
LC 2 3,5 3,5 5
L 4 5 5 6
RC 5 6,5 6,5 8
f. Percobaan 6.
Gambar 3.7. Membership Function percobaan keenam untuk nilai (x, y) Jika diketahui range untuk vehicle position pada percobaan 6 akan dijelaskan pada tabel dibawah ini
Tabel 9. Nilai range untuk vehicle position pada percobaan 6 Vehicle
Position
Range (m)
Left Bottom Left Top Right Top Right Bottom
L 0 0 1 3
LC 2 3,5 3,5 5
L 4 5 5 6
RC 5 6,5 6,5 8
g. Percobaan 7.
Gambar 3.8. Membership Function percobaan ketujuh untuk nilai (x, y) Jika diketahui range untuk vehicle position pada percobaan 7 akan dijelaskan pada tabel dibawah ini:
Tabel 10. Nilai range untuk vehicle position pada percobaan 7 Vehicle
Position
Range (m)
Left Bottom Left Top Right Top Right Bottom
L 0 0 1 4
LC 3 4 4 5
L 4,5 5 5 5,5
RC 5 6 6 7
2. Alternative Membership Fuction untuk nilai (ᴓ).
a. Percobaan 1 .
Gambar 3.9. Membership Function percobaan pertama untuk nilai (ᴓ)
Jika diketahui range untuk vehicle orientation pada percobaan 1 akan dijelaskan pada tabel dibawah ini:
Tabel 11. Nilai range untuk vehicle orientation pada percobaan 1 Vehicle
Orientation
Range ( 0 )
Left Bottom Left Top Right Top Right Bottom
LD -90 -90 -45 20
L -20 20 20 70
LU 45 70 70 90
U 75 90 90 105
RU 90 110 110 135
R 110 160 160 200
b. Percobaan 2 .
Gambar 3.10. Membership Function percobaan kedua untuk nilai (ᴓ)
Jika diketahui range untuk vehicle orientation pada percobaan 2 akan dijelaskan pada tabel dibawah ini:
Tabel 12. Nilai range untuk vehicle orientation pada percobaan 2 Vehicle
Orientation
Range ( 0 )
Left Bottom Left Top Right Top Right Bottom
LD -90 -90 -45 20
L -20 20 20 70
LU 45 70 70 90
U 75 90 90 105
RU 90 110 110 135
R 110 160 160 200
c. Percobaan 3.
Gambar 3.11. Membership Function percobaan ketiga untuk nilai (ᴓ)
Jika diketahui range untuk vehicle orientation pada percobaan 3 akan dijelaskan pada tabel dibawah ini:
Tabel 13. Nilai range untuk vehicle orientation pada percobaan 3 Vehicle
Orientation
Range ( 0 )
Left Bottom Left Top Right Top Right Bottom
LD -90 -45 -45 20
L 0 25 25 50
LU 30 60 60 90
U 65 90 90 115
RU 90 120 120 150
R 130 155 155 180
d. Percobaan 4.
Gambar 3.12. Membership Function percobaan keempat untuk nilai (ᴓ)
Jika diketahui range untuk vehicle orientation pada percobaan 4 akan dijelaskan pada tabel dibawah ini:
Tabel 14. Nilai range untuk vehicle orientation pada percobaan 4 Vehicle
Orientation
Range ( 0 )
Left Bottom Left Top Right Top Right Bottom
LD -90 -90 -45 20
L -20 20 20 70
LU 45 70 70 90
U 75 90 90 105
RU 90 110 110 135
R 110 160 160 200
e. Percobaan 5.
Gambar 3.13. Membership Function percobaan kelima untuk nilai (ᴓ)
Jika diketahui range untuk vehicle orientation pada percobaan 5 akan dijelaskan pada tabel dibawah ini:
Tabel 15. Nilai range untuk vehicle orientation pada percobaan 5 Vehicle
Orientation
Range ( 0 )
Left Bottom Left Top Right Top Right Bottom
LD -90 -45 -45 20
L 0 25 25 50
LU 30 60 60 90
U 65 90 90 115
RU 90 120 120 150
R 130 155 155 180
f. Percobaan 6.
Gambar 3.14. Membership Function percobaan keenam untuk nilai (ᴓ)
Jika diketahui range untuk vehicle orientation pada percobaan 6 akan dijelaskan pada tabel dibawah ini:
Tabel 16. Nilai range untuk vehicle orientation pada percobaan 6 Vehicle
Orientation
Range ( 0 )
Left Bottom Left Top Right Top Right Bottom
LD -90 -90 -45 20
L -20 20 20 70
LU 45 70 70 90
U 75 90 90 105
RU 90 110 110 135
R 110 160 160 200
g. Percobaan 7.
Gambar 3.15. Membership Function percobaan ketujuh untuk nilai (ᴓ)
Jika diketahui range untuk vehicle orientation pada percobaan 7 akan dijelaskan pada tabel dibawah ini:
Tabel 17. Nilai range untuk vehicle orientation pada percobaan 7 Vehicle
Orientation
Range ( 0 )
Left Bottom Left Top Right Top Right Bottom
LD -90 -45 -45 20
L 0 25 25 50
LU 30 60 60 90
U 65 90 90 115
RU 90 120 120 150
R 130 155 155 180
3. Alternative Membership Fuction untuk nilai (θ). a. Percobaan 1 .
Gambar 3.16. Membership Fuction percobaan pertama untuk nilai (θ)
Jika diketahui range untuk vehicle orientation pada percobaan 1 akan dijelaskan pada tabel dibawah ini:
Tabel 18. Nilai range untuk steering angle pada percobaan 1 Steering
Angle
Range ( 0 )
Left Bottom Left Top Right Top Right Bottom
NB -30 -30 -30 -15
NM -30 -15 -15 -5
NS -15 -5 -5 0
Z -5 0 0 5
PS 0 5 5 15
PM 5 15 15 30
b. Percobaan 2 .
Gambar 3.17. Membership Function percobaan kedua untuk nilai (θ)
Jika diketahui range untuk vehicle orientation pada percobaan 1 akan dijelaskan pada tabel dibawah ini:
Tabel 19. Nilai range untuk steering angle pada percobaan 2 Steering
Angle
Range ( 0 )
Left Bottom Left Top Right Top Right Bottom
NB -30 -30 -30 -15
NM -30 -15 -15 -5
NS -15 -5 -5 0
Z -5 0 0 5
PS 0 5 5 15
PM 5 15 15 30
c. Percobaan 3.
Gambar 3.18. Membership Function percobaan ketiga untuk nilai (θ)
Jika diketahui range untuk vehicle orientation pada percobaan 1 akan dijelaskan pada tabel dibawah ini:
Tabel 20. Nilai range untuk steering angle pada percobaan 3
Steering Angle
Range ( 0 )
Left Bottom Left Top Right Top Right Bottom
NB -30 -30 -30 -15
NM -30 -15 -15 -5
NS -15 -5 -5 0
Z -5 0 0 5
PS 0 5 5 15
PM 5 15 15 30
d. Percobaan 4.
Gambar 3.19. Membership Function percobaan keempat untuk nilai (θ) Jika diketahui range untuk vehicle orientation pada percobaan 1 akan dijelaskan pada tabel dibawah ini:
Tabel 21. Nilai range untuk steering angle pada percobaan 4 Steering
Angle
Range ( 0 )
Left Bottom Left Top Right Top Right Bottom
NB -30 -23 -23 -15
NM -25 -13 -13 -5
NS -15 -5 -5 0
Z -5 0 0 5
PS 0 5 5 15
PM 5 10 10 25
e. Percobaan 5.
Gambar 3.20. Membership Function percobaan kelima untuk nilai (θ)
Jika diketahui range untuk vehicle orientation pada percobaan 1 akan dijelaskan pada tabel dibawah ini:
Tabel 22. Nilai range untuk steering angle pada percobaan 5 Steering
Angle
Range ( 0 )
Left Bottom Left Top Right Top Right Bottom
NB -30 -30 -30 -15
NM -30 -15 -15 -5
NS -15 -5 -5 0
Z -5 0 0 5
PS 0 5 5 15
PM 5 15 15 30
f. Percobaan 6.
Gambar 3.21. Membership Function percobaan keenam untuk nilai (θ)
Jika diketahui range untuk vehicle orientation pada percobaan 1 akan dijelaskan pada tabel dibawah ini:
Tabel 23. Nilai range untuk steering angle pada percobaan 6 Steering
Angle
Range ( 0 )
Left Bottom Left Top Right Top Right Bottom
NB -30 -23 -23 -15
NM -25 -13 -13 -5
NS -15 -5 -5 0
Z -5 0 0 5
PS 0 5 5 15
PM 5 10 10 25
g. Percobaan 7.
Gambar 3.22. Membership Function percobaan ketujuh untuk nilai (θ)
Jika diketahui range untuk vehicle orientation pada percobaan 1 akan dijelaskan pada tabel dibawah ini:
Tabel 24. Nilai range untuk steering angle pada percobaan 7 Steering
Angle
Range ( 0 )
Left Bottom Left Top Right Top Right Bottom
NB -30 -23 -23 -15
NM -25 -13 -13 -5
NS -15 -5 -5 0
Z -5 0 0 5
PS 0 5 5 15
PM 5 10 10 25
PB 15 23 23 30
3.3. Menentukan Fuzzy Inference
Fuzzy inference ini berfungsi untuk mengetahui nilai keluaran dari membership function dengan menggunakan metode max-min. Jadi terlebih dahulu menentukan nilai max-min pada vehicle position dan vehicle orientation, sehingga dapat diketahui keluaran dari steering angle.
Proses inferensi fuzzy untuk arah steering negative big
If vehicle position = Right Center And vehicle orientation = Left Down Then steering angle = Negative Small
Gambar 3.23. Penentuan arah steering angle untuk negative big Proses inferensi fuzzy untuk arah steering negative medium
If vehicle position = Right
Gambar 3.24. Penentuan arah steering angle untuk negative medium Proses inferensi fuzzy untuk arah steering negative medium
If vehicle position = Left Center And vehicle orientation = Left Then steering angle = Negative small
Gambar 3.25. Penentuan arah steering angle untuk negative small Proses inferensi fuzzy untuk arah steering zero
Gambar 3.26. Penentuan arah steering angle untuk Zero Proses inferensi fuzzy untuk arah steering positive small
If vehicle position = Center
And vehicle orientation = Right Up Then steering angle = Positif Small
Gambar 3.27. Penentuan arah steering angle untuk positif small Proses inferensi fuzzy untuk arah steering positive medium
If vehicle position = Left
Gambar 3.28. Penentuan arah steering angle untuk positif medium Proses inferensi fuzzy untuk arah steering positive big
If vehicle position = Left And vehicle orientation = Right Then steering angle = Positif Big
Gambar 3.29. Penentuan arah steering angle untuk positif big
3.4. Cara mendesain vi fuzzy logic pada LabView
Untuk mendesain vi pada fuzzy logic terdapat beberapa bagian : 1. Project manager-untuk membuat project untuk logika fuzzy 2. Fuzzy set editor-membuat masukan variable linguistic
Berikut penjelasan dari bagian-bagian dalam mendesai vi pada fuzzy logic tersebut :
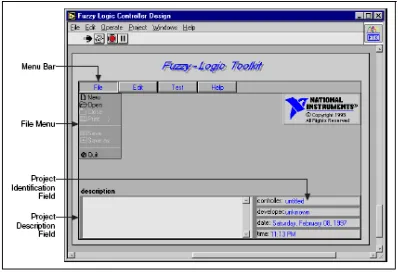
3.4.1. Project Manager
Untuk dapat membuka tampilan ini, maka terlebih dahulu harus sudah masuk kedalam software labview. Setelah itu pilih tool >> fuzzy logic control system. Berikut gambaran dari project manager :
Gambar 3.30. Tampilan project manager 3.4.2. Fuzzy set-editor
Fuzzy set-editor ini berupa nilai dari variabel linguistik. Dimana langkah-langkah untuk dapat membuka tampilan fuzzy set-editor ini adalah langkah pertama pilih file>>open .
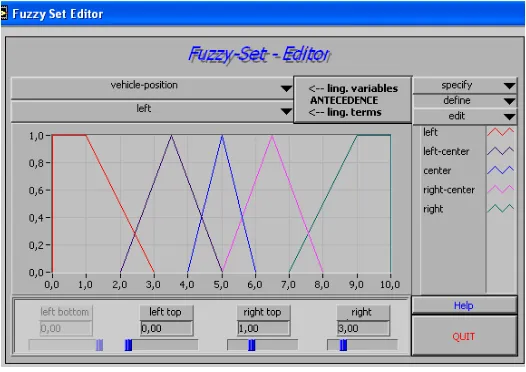
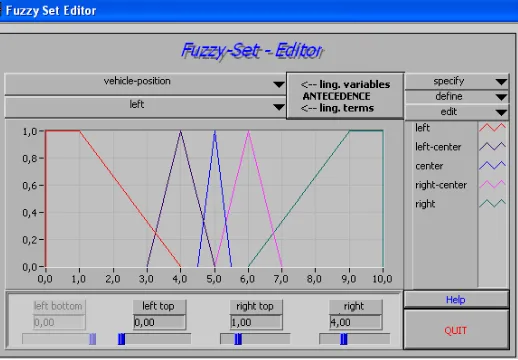
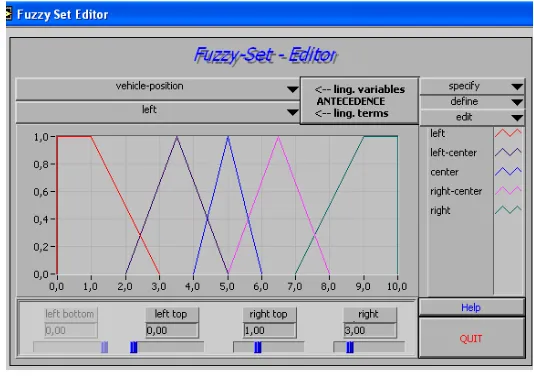
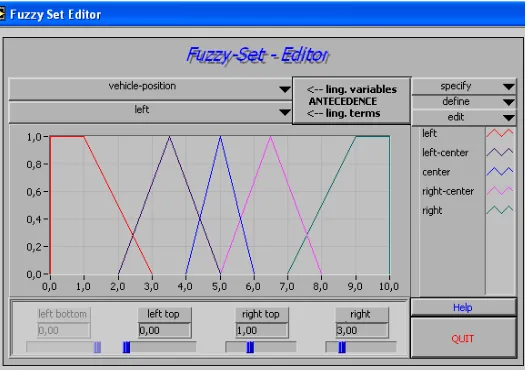
Dalam perancangan untuk variabel linguistik ini sudah terdapat vi yang dapat diubah secara langsung untuk masukannya. Berikut tampilan dari fuzzy set-editor yang sudah selesai dalam masukan data yang akan di ujicoba.
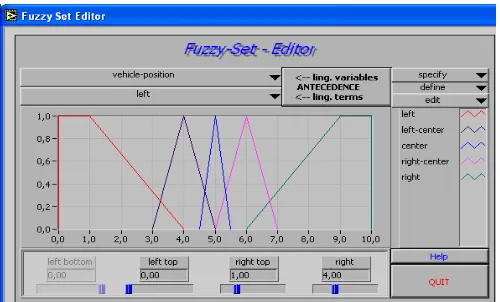
Masukan untuk vehicle-position
Gambar 3.32. Tampilan dari vehicle-position Keterangan :
Untuk grafik warna merah (left) memiliki range dari 0 sampai 4
Untuk grafik warna hitam (left center) memiliki range dari 3 sampai 5
Untuk grafik warna biru (center) memiliki range dari 4,5 sampai 5,5
Untuk grafik warna merah muda (right center) memiliki range dari 5 sampai 7
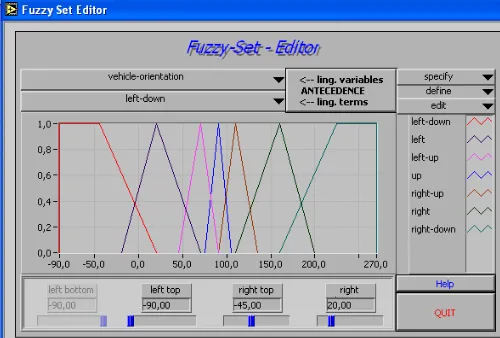
Masukan untuk vehicle-orientation
Gambar 3.33. Tampilan dari vehicle-orientation Keterangan :
Untuk grafik warna merah (left down) memiliki range dari (-90) sampai 20
Untuk grafik warna hitam (left) memiliki range dari (-20) sampai 70
Untuk grafik warna merah muda (left up) memiliki range dari 45 sampai 90
Untuk grafik warna biru (up) memiliki range dari 75 sampai 105
Untuk grafik warna coklat (right up) memiliki range dari 90 sampai 135
Untuk grafik warna biru muda (right down) memiliki range dari 160 sampai 270
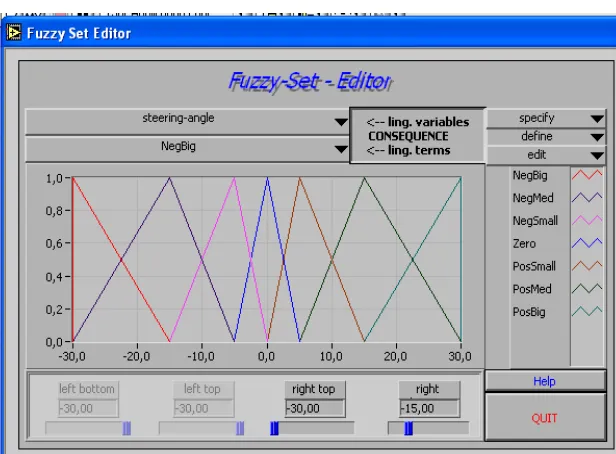
Masukan untuk steering-angle
Gambar 3.34. Tampilan dari steering-angle Keterangan :
Untuk grafik warna merah (left down) memiliki range dari (-30) sampai (-15)
Untuk grafik warna hitam (left) memiliki range dari (-30) sampai (-5)
Untuk grafik warna merah muda (left up) memiliki range dari (-15) sampai 0
Untuk grafik warna coklat (right up) memiliki range dari 0 sampai 15
Untuk grafik warna hijau (right) memiliki range dari 5 sampai 30
Untuk grafik warna biru muda (right down) memiliki range dari 15 sampai 30
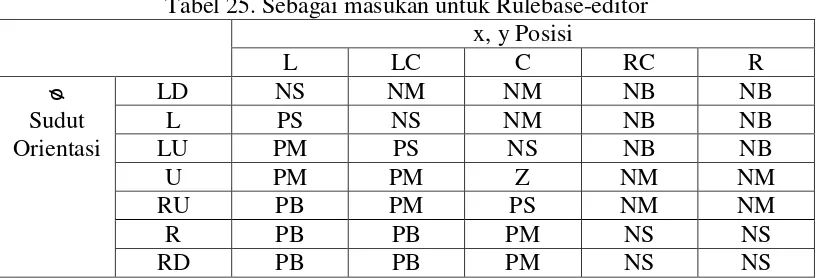
3.4.3. Rulebase-editor
Setelah fuzzy set-editor dibuat, maka perlu untuk mengatur juga rulebase-editor sebagai aturan dasar dari sistem fuzzy yang akan dibuat. Dalam perancangannya terdiri dari 35 rules yang harus dibuat, karena pada aturan pertama terdapat 5 masukan untuk vehicle-position dan pada aturan kedua terdapat 7 masukan untuk vehicle-orientation. Ke- 35 rules tersebut dapat diambil dari referensi yang didapat pada perancangan parkir mobil otomatis.
Berikut tampilan dari Rulebase-editor yang sudah selesai dalam masukan data yang akan di ujicoba :
Masukan untuk Rulebase-editor
Gambar 3.35. Rulebase-editor 1 sampai 15
50
Pada bab ini akan dibahas mengenai hasil pengujian dari membership function yang telah dilakukan percobaan pada sebelumnya, setelah itu dianalisa untuk mengetahui membership function mana yang lebih baik. Jika dilihat dari kecepatan waktu dan banyaknya step untuk mobil agar bisa mencapai nilai yang ditentukan. 4.1. Hasil Ujicoba
Ujicoba yang dilakukan menggunakan simulasi dengan LabVIEW, dari setiap percobaan diinisialisasikan bahwa posisi dan orientasi mobil setiap kondisinya sama yaitu dengan posisi [x , y] = [2 , 2] dan orientasi ᴓ = 1800.
Gambar 4.1. Inisialisasi posisi awal mobil
Gambar 4.2. Simulasi Labview
Dibawah ini hasil dari beberapa percobaan simulasi yang dilakukan dengan mengubah nilai masukan pada membership function:
Percobaan Membership Function 1
Hasil Pergerakan, step dan waktu pada membership function 1
Untuk percobaan 1, dengan membership function yang digunakan maka dibutuhkan waktu 4,816 dan 25 step untuk dapat menyelesaikan proses parkir. Dengan pergerakan posisi mobil dapat dilihat pada grafik posisi mobilnya.
Percobaan Membership Function 2
Hasil Pergerakan, step dan waktu pada membership function 2
Gambar 4.4. Hasil pergerakan mobil, step dan waktu pada mf 2
Untuk percobaan 2, dengan membership function yang digunakan maka dibutuhkan waktu 10,032 dan 51 step untuk dapat menyelesaikan proses parkir. Dengan pergerakan posisi mobil dapat dilihat pada grafik posisi mobilnya.
Percobaan Membership Function 3
Gambar 4.5. Hasil pergerakan mobil, step dan waktu pada mf 3
Untuk percobaan 3, dengan membership function yang digunakan maka dibutuhkan waktu 10,234 dan 52 step untuk dapat menyelesaikan proses parkir. Dengan pergerakan posisi mobil dapat dilihat pada grafik posisi mobilnya.
Percobaan Membership Function 4
Hasil Pergerakan, step dan waktu pada membership function 4
Untuk percobaan 4, dengan membership function yang digunakan maka dibutuhkan waktu 9,629 dan 49 step untuk dapat menyelesaikan proses parkir. Dengan pergerakan posisi mobil dapat dilihat pada grafik posisi mobilnya.
Percobaan Membership Function 5
Hasil Pergerakan, step dan waktu pada membership function 5
Gambar 4.7. Hasil pergerakan mobil, step dan waktu pada mf 5
Percobaan Membership Function 6
Hasil Pergerakan, step dan waktu pada membership function 6
Gambar 4.8. Hasil pergerakan mobil, step dan waktu pada mf 6
Untuk percobaan 6, dengan membership function yang digunakan maka dibutuhkan waktu 10,031 dan 51 step untuk dapat menyelesaikan proses parkir. Dengan pergerakan posisi mobil dapat dilihat pada grafik posisi mobilnya.
Percobaan Membership Function 7
Gambar 4.9. Hasil pergerakan mobil, step dan waktu pada mf 7
Untuk percobaan 7, dengan membership function yang digunakan maka dibutuhkan waktu 10,233 dan 52 step untuk dapat menyelesaikan proses parkir. Dengan pergerakan posisi mobil dapat dilihat pada grafik posisi mobilnya.
Berikut tabel perbandingan hasil ujicoba dari percobaan simulasi yang telah dilakukan, bila dilihat dari kecepatan waktu dan berapa banyaknya step yang dibutuhkan dalam melakukan proses parkir.
Tabel 26. Perbandingan banyaknya step dan waktu yang dibutuhkan Percobaan Waktu step
MF-1 4,816 25
MF-2 10,032 51
MF-3 10,234 52
MF-4 9,629 49
MF-5 9,029 49
MF-6 10,031 51
Dari tabel diatas dapat diketahui bahwa tipe membership function 1 lebih baik dalam kecepatan waktu dan step yang dibutuhkan untuk mencapai posisi yang telah ditentukan dibandingkan dengan tipe membership function lainnya dengan percobaan 1 untuk membership function didapat dari referensi.
Sedangkan apabila dilihat dari pebandingan metode defuzzifikasi yang digunakan, maka dapat dilihat pada tabel dibawah ini :
Tabel 27. Metode Defuzzifikasi dengan center of max Percobaan Waktu step
Tabel 28. Metode Defuzzifikasi dengan center of grav
Tabel 29. Metode Defuzzifikasi dengan mean of max
Percobaan Waktu step
MF-1 14,443 73
MF-2 10,029 51
MF-3 9,629 49
MF-4 15,246 77
MF-5 9,628 49
MF-6 10,032 51
MF-7 14,846 75
4.2. Ujicoba Pada Posisi Ramp Berbeda
Hasil ujicoba pergerakan simulasi pada posisi ramp 3
Gambar 4.10. Hasil pergerakan mobil, step dan waktu ramp 3
Hasil ujicoba pergerakan simulasi pada posisi ramp 6
Gambar 4.11. Hasil pergerakan mobil, step dan waktu ramp 6
Untuk percobaan agar mobil dapat berhenti pada titik 6, dengan inisialisasi posisi awal untuk vehicle position (2, 2) dan vehicle orientation 1800 serta menggunakan membership function tipe mf-1 maka dibutuhkan waktu 9,829 dan 50 step untuk dapat menyelesaikan proses parkir. Dengan pergerakan posisi mobil dapat dilihat pada grafik posisi mobilnya.
4.3. Analisa
4.3.1. Hasil Percobaan
Sedangkan bila dilihat dari metode yang digunakannya, bila dilihat dari rata-rata waktu yang didapatkan dari masing-masing tipe defuzzifikasi, maka center of grav memiliki rata-rata kecepatan waktu lebih baik dibandingkan dengan dengan center of max dan mean of max. Rata-rata waktu pada percobaan center of grav adalah 9,13 setiap percobaan sedangkan pada center of max mempunyai rata-rata waktu 10,08 setiap percobaan dan rata-rata waktu pada defuzzifikasi mean of max adalah 11,96 setiap percobaannya.
1.3.2. Mencari nilai keluaran dari arah steering angle
Untuk mencari nilai steering angle dapat dilakukan dengan cara menentukan nilai max-min pada vehicle posisi dan vehicle orientation lalu memasukannya kedalam persamaan berikut yang didapat pada referensi.
θ(out) = ……… (pers. 4.1)
Keterangan :
θ = Sudut keluaran
θ1 = Sudut terkecil
θ2 = Sudut terbesar
V (rule 1) = Nilai max V (rule 2) = Nilai min
1. Nilai keluaran steering angle pada percobaan pertama
Tabel 30. rule untuk setiap keluaran steering angle x, y Posisi (m) menentukan nilai-nilai yang dibutuhkan kedalam pers. 4.1. Yang pertama dilakukan yaitu menentukan nilai max-min pada vehicle position dan vehicle orientation untuk setiap masukan.
Dimisalkan untuk vehicle position dan vehicle orientation didapatkan nilai max-min sebagai berikut :
Tabel 31. Nilai max-min vehicle position Vehicle Position Nilai max Nilai min
L 0,3 0,1
Tabel 32. Nilai max-min vehicle orientation
Vehicle Orientation Nilai max Nilai min
Sedangkan untuk range pada steering angle dapat dilihat pada tabel berikut :
Tabel 33. Nilai range dari setiap keluaran steering angle Steering
Angle
Range
Left Bottom Left Top Right Top Right Bottom
NB -30 -30 -30 -15
Berikut beberapa contoh untuk mendapatkan nilai keluaran pada steering angle :
Jika vehicle position berada pada posisi RC
Dan vehicle orientation berada pada posisi LD Maka steering angle berada pada posisi NB
Berikut cara untuk mendapatkan nilai keluaran dari NB : Jika diketahui :
- Vehicle position = RC, maka max-min bernilai 0,8 dan 0,1 - Vehicle orientation = LD, maka max-min bernilai 0,6 dan 0,1 - Jika diketahui range untuk NB adalah -30 sampai -15
Maka, nilai dari NB adalah :
θ(out) = = = = -16,6
Jika vehicle position berada pada posisi R
Dan vehicle orientation berada pada posisi RU Maka steering angle berada pada posisi NM
Berikut cara untuk mendapatkan nilai keluaran dari NM : Jika diketahui :
- Vehicle position = R, maka max-min bernilai 0,3 dan 0,1 - Vehicle orientation = RU, maka max-min bernilai 0,6 dan 0,1
- Jika diketahui range untuk NM adalah -30 sampai -5 dengan nilai tengah -15
Maka, nilai dari NM adalah :
θ(out) = = = = -17,1
Jadi, nilai -17,1 merupakan nilai keluaran dari NM. Karena ,range untuk NM berada pada nilai -30 sampai -5.
Jika vehicle position berada pada posisi LC
Dan vehicle orientation berada pada posisi L Maka steering angle berada pada posisi NS
Berikut cara untuk mendapatkan nilai keluaran dari NS : Jika diketahui :
- Vehicle position = LC, maka max-min bernilai 0,8 dan 0,1 - Vehicle orientation = L, maka max-min bernilai 0,6 dan 0,1
Maka, nilai dari NS adalah :
θ(out) = = = = -6,1
Jadi, nilai -6,1 merupakan nilai keluaran dari NS. Karena ,range untuk NM berada pada nilai -15 sampai 0.
Jika vehicle position berada pada posisi C
Dan vehicle orientation berada pada posisi U Maka steering angle berada pada posisi Z
Berikut cara untuk mendapatkan nilai keluaran dari Z : Jika diketahui :
- Vehicle position = C, maka max-min bernilai 0,8 dan 0,1 - Vehicle orientation = U, maka max-min bernilai 0,8 dan 0,1
- Jika diketahui range untuk Z adalah -5 sampai 5 dengan nilai tengah 0 Maka, nilai dari Z adalah :
θ(out) = = = -0,5
Jadi, nilai -0,5 merupakan nilai keluaran dari Z. Karena ,range untuk Z berada pada nilai -5 sampai 5.
Jika vehicle position berada pada posisi C
Dan vehicle orientation berada pada posisi RU Maka steering angle berada pada posisi PS
Berikut cara untuk mendapatkan nilai keluaran dari PS : Jika diketahui :
- Vehicle orientation = RU, maka max-min bernilai 0,8 dan 0,1
- Jika diketahui range untuk PS adalah 0 sampai 15 dengan nilai tengah 5
Maka, nilai dari PS adalah :
θ(out) = = = 4,4
Jadi, nilai 4,4 merupakan nilai keluaran dari PS. Karena ,range untuk PS berada pada nilai 0 sampai 15.
Jika vehicle position berada pada posisi L
Dan vehicle orientation berada pada posisi LU Maka steering angle berada pada posisi PM
Berikut cara untuk mendapatkan nilai keluaran dari PM : Jika diketahui :
- Vehicle position = L, maka max-min bernilai 0,3 dan 0,1 - Vehicle orientation = LU, maka max-min bernilai 0,8 dan 0,1
- Jika diketahui range untuk PM adalah 5 sampai 30 dengan nilai tengah 15
Maka, nilai dari PM adalah :
θ(out) = = = = 13,8
Jadi, nilai 13,8 merupakan nilai keluaran dari PM. Karena ,range untuk PM berada pada nilai 5 sampai 30.
Jika vehicle position berada pada posisi L
Maka steering angle berada pada posisi PB
Berikut cara untuk mendapatkan nilai keluaran dari PB : Jika diketahui :
- Vehicle position = L, maka max-min bernilai 0,3 dan 0,1 - Vehicle orientation = R, maka max-min bernilai 0,8 dan 0,1 - Jika diketahui range untuk PB adalah 15 sampai 30
Maka, nilai dari PB adalah :
θ(out) = = = = 28,3
Jadi, nilai 28,3 merupakan nilai keluaran dari PM. Karena ,range untuk PM berada pada nilai 15 sampai 30.
Dari perhitungan diatas maka didapatkan nilai untuk setiap keluaran steering angle adalah sebagai berikut, seperti yang tertera pada tabel dibawah ini :
2. Nilai keluaran steering angle pada percobaan kedua
Tabel 35. rule untuk setiap keluaran steering angle x, y Posisi (m)
Nilai-nilai pada tabel 12 didapatkan dengan memasukan nilai yang sudah ditetukan kedalam pers. 4.1. Yang pertama dilakukan yaitu menentukan nilai max-min pada vehicle position dan vehicle orientation untuk setiap masukan.
Dimisalkan untuk vehicle position dan vehicle orientation didapatkan nilai max-min sebagai berikut :
Tabel 36. Nilai max-min vehicle position Vehicle Position Nilai max Nilai min
L 0,4 0,1 Vehicle Orientation Nilai max Nilai min
Sedangkan untuk range pada steering angle dapat dilihat pada tabel berikut :
Tabel 38. Nilai range dari setiap keluaran steering angle Steering
Angle
Range
Left Bottom Left Top Right Top Right Bottom
NB -30 -30 -30 -15
Berikut beberapa contoh untuk mendapatkan nilai keluaran pada steering angle :
Jika vehicle position berada pada posisi RC
Dan vehicle orientation berada pada posisi LD Maka steering angle berada pada posisi NB
Berikut cara untuk mendapatkan nilai keluaran dari NB : Jika diketahui :
- Vehicle position = RC, maka max-min bernilai 0,6 dan 0,1 - Vehicle orientation = LD, maka max-min bernilai 0,6 dan 0,1 - Jika diketahui range untuk NB adalah -30 sampai -15
Maka, nilai dari NB adalah :
Jadi, nilai -12,8 merupakan nilai keluaran dari NB. Karena ,range untuk NB hanya berada pada nilai -30 sampai -15. Maka untuk setiap nilai -12,8 akan menjadi NM
Jika vehicle position berada pada posisi R
Dan vehicle orientation berada pada posisi RU Maka steering angle berada pada posisi NM
Berikut cara untuk mendapatkan nilai keluaran dari NM : Jika diketahui :
- Vehicle position = R, maka max-min bernilai 0,4 dan 0,1 - Vehicle orientation = RU, maka max-min bernilai 0,8 dan 0,1
- Jika diketahui range untuk NM adalah -30 sampai -5 dengan nilai tengah -15
Maka, nilai dari NM adalah :
θ(out) = = = = -16,6
Jadi, nilai -16,6 merupakan nilai keluaran dari NM. Karena ,range untuk NM berada pada nilai -30 sampai -5.
Jika vehicle position berada pada posisi LC
Dan vehicle orientation berada pada posisi L Maka steering angle berada pada posisi NS
Berikut cara untuk mendapatkan nilai keluaran dari NS : Jika diketahui :
- Vehicle orientation = L, maka max-min bernilai 0,6 dan 0,1
- Jika diketahui range untuk NS adalah -15 sampai 0 dengan nilai tengah -5
Maka, nilai dari NS adalah :
θ(out) = = = = -5,5
Jadi, nilai -5,5 merupakan nilai keluaran dari NS. Karena ,range untuk NM berada pada nilai -15 sampai 0.
Jika vehicle position berada pada posisi C
Dan vehicle orientation berada pada posisi U Maka steering angle berada pada posisi Z
Berikut cara untuk mendapatkan nilai keluaran dari Z : Jika diketahui :
- Vehicle position = C, maka max-min bernilai 0,8 dan 0,1 - Vehicle orientation = U, maka max-min bernilai 0,8 dan 0,1
- Jika diketahui range untuk Z adalah -5 sampai 5 dengan nilai tengah 0 Maka, nilai dari Z adalah :
θ(out) = = = -0,5
Jadi, nilai -0,5 merupakan nilai keluaran dari Z. Karena ,range untuk Z berada pada nilai -5 sampai 5.
Jika vehicle position berada pada posisi C
Berikut cara untuk mendapatkan nilai keluaran dari PS : Jika diketahui :
- Vehicle position = C, maka max-min bernilai 0,8 dan 0,1 - Vehicle orientation = RU, maka max-min bernilai 0,8 dan 0,1
- Jika diketahui range untuk PS adalah 0 sampai 15 dengan nilai tengah 5
Maka, nilai dari PS adalah :
θ(out) = = = 4,4
Jadi, nilai 4,4 merupakan nilai keluaran dari PS. Karena ,range untuk PS berada pada nilai 0 sampai 15.
Jika vehicle position berada pada posisi L
Dan vehicle orientation berada pada posisi LU Maka steering angle berada pada posisi PM
Berikut cara untuk mendapatkan nilai keluaran dari PM : Jika diketahui :
- Vehicle position = L, maka max-min bernilai 0,4 dan 0,1 - Vehicle orientation = LU, maka max-min bernilai 0,8 dan 0,1
- Jika diketahui range untuk PM adalah 5 sampai 30 dengan nilai tengah 15
Maka, nilai dari PM adalah :
Jadi, nilai 13,8 merupakan nilai keluaran dari PM. Karena ,range untuk PM berada pada nilai 5 sampai 30.
Jika vehicle position berada pada posisi L
Dan vehicle orientation berada pada posisi R Maka steering angle berada pada posisi PB
Berikut cara untuk mendapatkan nilai keluaran dari PB : Jika diketahui :
- Vehicle position = L, maka max-min bernilai 0,4 dan 0,1 - Vehicle orientation = R, maka max-min bernilai 0,8 dan 0,1 - Jika diketahui range untuk PB adalah 15 sampai 30
Maka, nilai dari PB adalah :
θ(out) = = = = 28,3
Jadi, nilai 28,3 merupakan nilai keluaran dari PB. Karena ,range untuk PM berada pada nilai 15 sampai 30.
Tabel 39. Nilai setiap keluaran steering angle
x, y Posisi
L LC C RC R
ᴓ
Sudut Orientasi
LD -5,5 -16,6 -16,6 -12,8 -12,8
L 4,4 -5,5 -16,6 -12,8 -12,8
LU 13,8 4,4 -5,5 -16,6 -16,6
U 13,8 13,8 -0,5 -16,6 -16,6
RU 28,3 13,8 4,4 -16,6 -16,6
R 28,3 28,3 13,8 -5,5 -5,5
74 5.1. Kesimpulan
Dari hasil ujicoba dan analisa yang didapat, maka dapat disimpulkan bahwa. Untuk hasil yang lebih baik maka bisa digunakan membership function tipe 1,
bila dilihat dari kecepatan waktu dan minimal step yang dibutuhkan untuk mencapai posisi yang telah ditentukan dibandingkan dengan membership function tipe lainnya yang digunakan dalam percobaan.
Sedangkan untuk metode defuzzifikasinya bisa menggunakan metode
defuzzifikasi center of max atau center of grav dibanding dengan metode defuzzifikasi mean of max. Bila dilihat dari kecepatan waktu dan minimal step yang dibutuhkan untuk mencapai posisi yang telah ditentukan.
5.2. Saran
Untuk saran yang dibutuhkan dalam penulisan tugas akhir ini adalah.
Kedepannya bisa lebih banyak lagi percobaan yang dilakukan untuk bisa
menemukan kecepatan waktu dan minimal step yang dibutuhkan agar simulasi ini bisa menjadi lebih baik lagi.
Karena waktu untuk membuat tugas akhir ini sangat singkat, maka disarankan