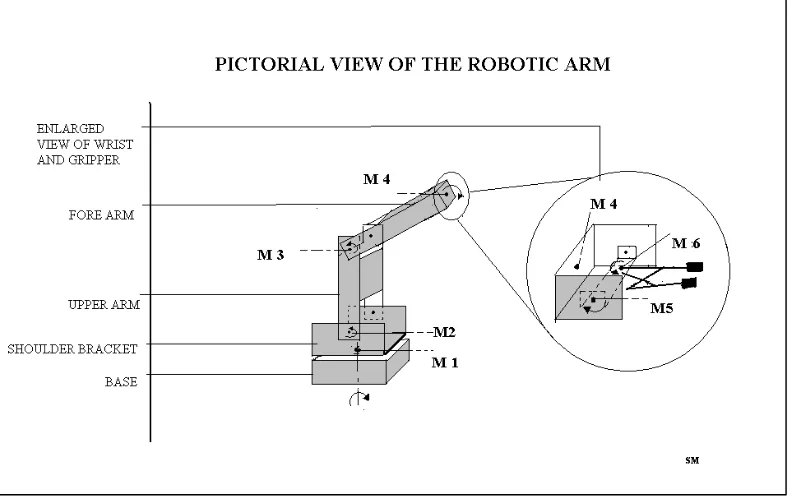
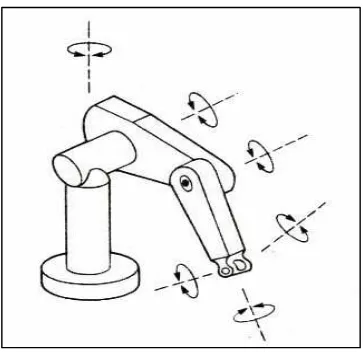
General Robotic Arm.
Teks penuh
Gambar
Garis besar
Dokumen terkait
If the robotic arm in the second part moved simultaneously according to the hand detected by the Leap Motion controller, the third part of this project will be
In this project, the design of wireless industrial robotic arm should be able to handle and lift up an object and also can be controlled using Android Platform1. Apps created
The purpose of this project is to develop real-time object tracking system for 2-Degree Of Freedom (DOF) robotic arm, which is a robotic based application with
The development of an upper limb robotic arm is passively important and needed to research based on the type of application perform, actuator and the controller.. The
In this project, a prototype called ' Robotic Arm Spy Tanker' is developed to operate several functions such as to take or hold an object and also to move an object to
This innovation project tried to keep on in that direction and controlled a robotic arm wirelessly through an android mobile connected to an Arduino Uno that reads the analog data of
A 2R robotic arm 5s First time, the second link rotate counterclockwise after five seconds, Figure 5.. A 2R robotic arm 8s Second time, the both links rotates counterclockwise after
An PIC programmable interrupt controller connects multiple external interrupts to one of the two ARM interrupt requests IRQ, FIQ... Interrupt interface CPU status reg data reg
