SKRIPSI
RANCANG BANGUN SISTEM SELF-LEVELING PADA TRIPOD KAMERA
BERBASIS MIKROKONTROLER
Disusun Sebagai Salah Satu Syarat Memperoleh
Gelar Sarjana Teknik Pada Program Strata Satu (S-1)
Jurusan Teknik Elektro Fakultas Teknik
Universitas Muhammadiyah Yogyakarta
Disusun Oleh :
Atini Sofi Apsari
(20110120009)
JURUSAN TEKNIK ELEKTRO
FAKULTAS TEKNIK
UNIVERSITAS MUHAMMADIYAH YOGYAKARTA
RANCANG BANGUN SISTEM SELF-LEVELING PADA TRIPOD KAMERA
BERBASIS MIKROKONTROLER
DISUSUN OLEH :
ATINI SOFI APSARI
NIM : 20110120009
JURUSAN TEKNIK ELEKTRO
FAKULTAS TEKNIK
UNIVERSITAS MUHAMMADIYAH YOGYAKARTA
HALAMAN PERNYATAAN
Yang bertanda tangan di bawah ini :
Nama
:Atini Sofi Apsari
NIM
: 20110120009
Jurusan
:Teknik Elektro
Menyatakan bahwa :
Semua yang ditulis dalam naskah skripsi ini merupakan hasil karya tulis saya
sendiri dan bukan menjiplak/plagiat hasil karya orang lain, kecuali landasan teori yang
saya kutip dari buku maupun referensi dari sumber yang tercantum pada daftar pustaka
sebagai referensi saya dalam menyelesaikan karya tulis ini. Apabila dikemudian hari
pernyataan ini tidak benar, maka saya siap menerima sanksi dari Universitas
Muhammadiyah Yogyakarta sesuai dengan peraturan yang berlaku.
Yogyakarta, 20 Juni 2016
Yang menyatakan,
Atini Sofi Apsari
MOTTO VAN PERSEMBAHAN
MOTTO:
“Allah akan meninggikan orang-orang yang beriman di antaramu dan orang-orang
yang diberi ilmu pengetahuan beberapa derajat” (QS. Al-Mujadalah : 11)
“Karena sesungguhnya sesudah kesulitan itu ada kemudahan, sesungguhnya
sesudah kesulitan itu ada kemudahan” (QS. Al-Insyiraah: 5-6)
“Yakinlah ada sesuatu yang menantimu selepas banyak kesabaran (yang kaujalani),
yang akan membuatmu terpana hingga kau lupa betapa pedihnya rasa sakit” (Imam
Ali bin Abi Thalib AS)
“Jangan menjelaskan tentang dirimu kepada siapapun. Karena yang menyukaimu
tidak butuh itu, dan yang membencimu tidak percaya itu” (Ali bin Abi Thalib)
PERSEMBAHAN :
Skripsi ini dipersembahkan :
Kepada Ayah, Agus Totok Parnyoto, dan Ibu, Parmiati. Semoga skripsi ini
merupakan awal dari kesempatan untuk bisa membalas jasa dan pengorbanan yang
kalian berikan, meskipun dengan waktu seumur hidup pun tidak akan cukup untuk
membalasnya.
Kepada Adik jenius kesayanganku, Satria Argadhika, yang bersedia
meluangkan waktunya untuk membantu menyelesaikan pembuatan skripsi ini dari awal
hingga akhir. Tanpanya skripsi ini tidak akan terwujud dengan baik.
Kepada Kakak-kakakku, Noni Huriati dan Lulu Rufaida, dan keluargaku di
Depok, yang memberikan support saat pembuatan skripsi ini.
Kepada teman dan sahabat, para wanita kebanggaanku, Aesha Fathara dan
Dinia Rachmawati, yang tidak hentinya menyemangati hingga skripsi ini akhirnya
selesai. Terima kasih sudah mendengarkan keluh kesahku hingga sekarang.
Kepada teman priaku yang teristimewa, Rendy Wijaya, terima kasih sudah
menemani, menyemangati, mendukung, hingga mendengarkan keluh kesah maupun
kebutuhanku dan tidak bosannya untuk menasihati maupun memberi saran saat proses
pembuatan skripsi ini berlangsung.
KATA PENGANTAR
Assalamu’alaykum Wr. Wb.
Dengan mengucapkan Puji dan Syukur penulis panjatkan akan kehadirat Allah
SWT yang telah memberikan Rahmat dan Hidayah-Nya sehingga penulis mampu
menyelesaikan pembuatan laporan skripsi dengan judul :
“RANCANG BANGUN SISTEM SELF-LEVELING PADA TRIPOD KAMERA
BERBASIS MIKROKONTROLER”
Berbagai upaya telah penulis lakukan demi memyelesaikan skripsi ini, tetapi
dikarenakan keterbatasan penulis, maka penulis memohon maaf yang sebesar-besarnya
apabila banyak kekurangan ditemukan dalam laporan skripsi ini, baik dalam susunan
kata, kalimat maupun sistematika pembahasannya. Penulis berharap agar laporan
skripsi ini dapat memberikan masukan positif bagi para pembaca sekalian pada
umumnya.
Selayaknya berbagai kreatifitas yang memerlukan inovasi di tiap waktunya,
laporan skripsi ini juga membutuhkan pengembangan apabila sekiranya terdapat hal-hal
baru untuk ditambahkan.
Terwujudnya skripsi ini juga tidak lepas dari bantuan dan dorongan berbagai
pihak. Dan dalam kesempatan ini, penulis menyampaikan ucapan terima kasih yang
sebesar-besarnya kepada yang terhormat :
1.
Bapak Prof. Dr. Bambang Cipto, M.A, selaku Rektor Universitas
Muhammadiyah Yogyakarta.
2.
Bapak Ir. Agus Jamal, M.Eng, selaku ketua Jurusan Teknik Elektro Universitas
Muhammadiyah Yogyakarta.
4.
Bapak Rama Okta Wiyagi, S.T., M.Eng, sebagai Dosen Pembimbing 2 yang
selalu sabar membimbing dan membagi ilmunya kepada penulis selama
melaksanakan pembuatan laporan skripsi ini.
5.
Bapak Muhamad Yusvin Mustar, S.T., M.Eng, sebagai Dosen Penguji pada saat
ujian pendadaran berlangsung.
6.
Bapak Jazaul Ikhsan, S.T., M.T., Ph.D., selaku Dekan Fakultas Teknik
Universitas Muhammadiyah Yogyakarta.
7.
Segenap Dosen Pengajar di Jurusan Teknik Elektro Universitas Muhammadiyah
Yogyakarta.
8.
Staf Tata Usaha Jurusan Teknik Elektro Universitas Muhammadiyah
Yogyakarta.
9.
Staf Laboratorium Jurusan Teknik Elektro Universitas Muhammadiyah
Yogyakarta.
10.
Seluruh rekan mahasiswa/i Teknik Elektro angakatan 2011 Universitas
Muhammadiyah Yogyakarta yang selalu mendukung selama masa perkuliahan
maupun proses pembuatan skripsi berlangsung.
11.
Semua pihak yang sudah membantu penulis yang pastinya tidak bisa disebutkan
satu persatu.
Akhir kata semoga skripsi ini dapat memberi manfaat dan tambahan ilmu kepada
para pembaca. Semoga Allah SWT senantiasa meridhoi, Amin ya Rabbal’alamin.
Wassalamu’alaykum Wr. Wb.
Yogyakarta, 20 Juni 2016
Penulis
Atini Sofi Apsari
DAFTAR ISI
SAMPUL (
COVER
)………..i
HALAMAN JUDUL………ii
HALAMAN PENGESAHAN I………...iii
LEMBAR PENGESAHAN II……….iv
HALAMAN PERNYATAAN………..v
MOTTO………...vi
PERSEMBAHAN………..vii
KATA PENGANTAR………...viii
DAFTAR ISI………x
DAFTAR TABEL……….xiv
DAFTAR GAMBAR………..xv
BAB I PENDAHULUAN………1
1.1
Latar Belakang………1
1.2
Rumusan Masalah………...2
1.3
Batasan Masalah……….2
1.4
Tujuan Penelitian………3
1.5
Metode Penelitian………...3
1.6
Sistematika Penulisan……….3
BAB II KAJIAN PUSTAKA DAN DASAR TEORI………..5
2.2 Dasar Teori……….5
2.2.1 Fotografi………5
2.2.1.1 Tripod………...6
2.2.2 Sensor Accelerometer MPU-6050……….7
2.2.3 Komunikasi I2C……….9
2.2.4 Motor DC……….10
2.2.5 Motor Driver L298N………13
2.2.6 Mikrokontroler ATMega328………...16
2.2.7 Arduino UNO………..20
2.2.8 Catu Daya………....22
2.2.9 Switching Regulator………...22
2.2.10 Kabel………..23
BAB III METODE PERANCANGAN DAN PEMBUATAN………..25
3.1 Diagram Alur Penelitian………...25
3.1.1 Uraian Diagram Blok………...26
3.2 Perancangan………..27
3.2.1 Proses Perancangan Mekanik………..28
3.2.2 Proses Perancangan Elektronik………29
3.2.2.1 Perancangan Mikrokontroler………..29
3.2.2.2 Sensor MPU-6050………..29
3.2.2.4 Rangkaian Catu Daya……….30
3.2.3 Perancangan Software……….30
3.3 Pembuatan Alat……….31
3.3.1 Alat dan Bahan………31
3.3.2 Pembuatan Hardware………...33
3.3.2.1 Pembuatan Rangkaian Elektronik………...33
3.3.2.2 Pembuatan Sistem Mekanik………...41
3.3.3 Pembuatan Program……….42
3.4 Pengujian Sementara………44
3.5 Perbaikan………..45
BAB IV PENGUJIAN ALAT DAN PEMBAHASAN……….48
4.1 Uji Coba Alat………48
4.2 Prinsip Kerja Alat……….48
4.3 Pengujian Hardware………..49
4.3.1 Pengujian Catu Daya………...49
4.3.2 Pengujian Sistem Arduino UNO R3………50
4.3.3 Pengujian Sensor MPU-6050………..51
4.3.4 Pengujian Motor Driver L298N………...53
4.3.5 Pengujian Kemiringan Terhadap Tripod……….53
4.4 Pengujian Software………...55
BAB V PENUTUP………63
5.1 Kesimpulan………...63
5.2 Saran……….63
DAFTAR PUSTAKA……….64
DAFTAR TABEL
Tabel 2.1
Prinsip Kerja Motor Driver L298N Untuk Keluaran Motor A...15
Tabel 2.2
Prinsip Kerja Motor Driver L298N Untuk Keluaran Motor B...15
Tabel 3.1
Nilai Kebenaran Motor Driver 1...39
Tabel 3.2
Nilai Kebenaran Motor Driver 2...39
Tabel 4.1
Pengujian Kemiringan MPU-6050...54
DAFTAR GAMBAR
Gambar 2.1
Kamera...5
Gambar 2.2
Tripod...6
Gambar 2.3
Sensor MPU-6050...8
Gambar 2.4
Digram Komunikasi I2C Bus...9
Gambar 2.5
Motor DC...11
Gambar 2.6
Struktur Motor Listrik...11
Gambar 2.7
Perputaran Motor (1)...12
Gambar 2.8
Perputaran Motor (2)...12
Gambar 2.9
Perputaran Motor (3)...13
Gambar 2.10
Motor Driver L298N...14
Gambar 2.11
H-bridge Transistor...14
Gambar 2.12
ATMega328...17
Gambar 2.13
Pin-pin ATMega328...18
Gambar 2.14
Arduino UNO...21
Gambar 2.15
Switching Regulator...23
Gambar 2.16
Kabel...24
Gambar 2.17
Kabel Jumper Male-to-Female...24
Gambar 3.1
Diagram Blok Penelitian...25
Gambar 3.2
Diagram Closed-loop...28
Gambar 3.4
Blok Diagram Perangkat Elektronik...33
Gambar 3.5
Gerak Yaw...34
Gambar 3.6
Gerak Pitch...34
Gambar 3.7
Gerak Roll...34
Gambar 3.8
Bagian-bagian Kaki Tripod...35
Gambar 3.9
Ilustrasi Pitch (1)...36
Gambar 3.10
Ilustrasi Pitch (2)...36
Gambar 3.11
Ilustrasi Roll (1)...37
Gambar 3.12
Ilustrasi Roll (2)...37
Gambar 3.13
Konfigurasi Sensor dan Arduino...38
Gambar 3.14
Papan Perangkat Elektronik...40
Gambar 3.15
Skematik Perangkat Elektronik...41
Gambar 3.16
Blok Diagram Perangkat Mekanik...41
Gambar 3.17
Pemasangan Motor DC di Kaki Tripod...42
Gambar 3.18
Flowchart Sistem...43
Gambar 3.19
Pemasangan Kapasitor di Motor DC...45
Gambar 3.20
Triplek Berlapis Alumunium...46
Gambar 3.21
Pemasangan Komponen di Triplek...46
Gambar 3.22
Rancang Ulang Perangkat Elektronik...47
Gambar 4.1
Bentuk Fisik Sistem Self-leveling Tripod...49
Gambar 4.3
Sketch Program Pengujian Arduino...51
Gambar 4.4
Sketch Program Pengujian MPU-6050...52
Gambar 4.5
Tampilan Nilai Yaw, Pitch, dan Roll oleh MPU-6050...52
Gambar 4.6
Tampilan Pengujian MPU-6050 di Titik Seimbang...54
Gambar 4.7
Sketch Program Kalibrasi MPU-6050...56
BAB I
PENDAHULUAN
1.1
Latar Belakang
Dewasa ini, kemajuan teknologi berkembang pesat. Hal tersebut ditunjukkan
dengan diciptakannya berbagai inovasi alat maupun instrumen yang bekerja secara
canggih dan otomatis. Inovasi diciptakan tidak lain adalah demi memenuhi kebutuhan
hidup manusia di segala macam bidang.
Seiring dengan perkembangan zaman, bidang fotografi semakin diminati oleh
banyak orang. Bermacam aksesoris kamera juga disediakan demi menunjang fotografer
dalam mengambil foto. Salah satunya adalah tripod.
Tripod yang digunakan untuk menyangga kamera agar stabil dalam mengambil
foto, biasanya diletakkan di permukaan tanah yang rata. Kendalanya permukaan tanah
memiliki kontur tanah yang berbeda-beda. Akibatnya, ada bagian permukaan tanah
yang lebih tinggi atau rendah dibanding yang lain, dan hal ini menyebabkan adanya
kemiringan pada kedudukan tripod. Ketika tripod mengalami kemiringan, dibutuhkan
penyesuaian pada kaki-kakinya agar tripod dapat berdiri stabil. Untuk menyesuaikan,
fotografer harus merentangkan satu atau sebagian kaki-kaki tripod lebih panjang atau
pendek secara manual.
Maka dari itu, penulis mencoba membuat alat untuk menstabilkan kaki tripod
secara otomatis (
self-leveling
) dalam pembuatan tugas akhir ini. Alat tersebut
memfokuskan kinerja pergerakan pada kaki-kaki tripod, dimana ketika tripod
diletakkan pada permukaan tanah dan kemudian mengalami kemiringan, maka secara
otomatis kaki tripod akan menyesuaikan panjang pendeknya tanpa campur tangan
fotografer. Alat ini akan memanfaatkan sensor kombinasi dari
accelerometer
dan
linear-actuator
pada kaki-kaki tripod. Sementara pengolah datanya berbasis
mikrokontroler.
1.2
Rumusan Masalah
Adapun permasalahan yang dihadapi dalam perancangan alat ini adalah:
1.
Bagaimana mendesain sebuah sistem
self-leveling
pada kaki tripod.
2.
Bagaimana proses pembuatan algoritma program dengan
input
dari sebuah
sensor
accelerometer
agar dapat menampilkan nilai-nilai kemiringan yang
diharapkan.
3.
Bagaimana proses pengolahan data dan algoritma program pada mikrokontroler
agar motor DC mampu bekerja sesuai dengan
input
dari sensor.
4.
Bagaimana menguji kestabilan tripod dengan sistem yang sudah dibuat.
1.3
Batasan Masalah
Beberapa batasan masalah yang terkait dengan pembuatan alat pada tugas akhir ini
yaitu:
1.
Sudut kemiringan tanah yang dideteksi memiliki rentang tertentu sesuai dengan
kemampuan jenis sensor accelerometer yang digunakan dan kemampuan tripod.
Pada penelitian ini penulis menggunakan sensor Accelerometer MPU-6050.
2.
Tipe mikrokontroler yang digunakan yaitu ATMega328 yang terintegrasi
dalam kit Arduino UNO R3.
3.
Tipe motor sebagai penggerak
linear-actuator
yang digunakan merupakan
modifikasi motor DC pada ketiga kaki tripod.
5.
Jenis catu daya yang digunakan akan tergantung pada kondisi saat pengujian
alat.
1.4
Tujuan Penelitian
Tujuan yang ingin dicapai adalah merancang suatu alat penunjang pada tripod yang
berfungsi menstabilkan kedudukan tripod secara otomatis (
self-leveling
) pada suatu
lahan tanah tertentu yang dapat menyebabkan tripod mengalami kemiringan, sehingga
pengguna tripod diharapkan tidak perlu mengutak-atik kaki-kaki tripod secara manual.
1.5
Metode Penelitian
Metode yang digunakan dalam penyusunan tugas akhir ini adalah:
1.
Studi pustaka
Studi pustaka dilakukan untuk mendapatkan informasi sebagai bahan acuan
dalam melakukan perencanaan, pembuatan, dan penyusunan tugas akhir.
2.
Perancangan sistem dan implementasi
Metode ini diawali dengan membuat blok diagram (skematik rangkaian) sistem
yang lengkap, membuat
prototype
sistem dan melakukan pengujian serta
analisis pada sistem yang sudah jadi.
3.
Network research
Metode ini digunakan untuk mengambil dan mengumpulkan informasi maupun
laporan secara
online
. Hal tersebut dilakukan karena pada
network research
mengandung banyak sumber informasi yang dapat diakses kapanpun dan
dimanapun.
1.6
Sistematika Penulisan
BAB I. PENDAHULUAN
Bab ini berisi tentang latar belakang, rumusan masalah, batasan masalah, tujuan dan
metode penelitian serta sistematika penulisan.
BAB II. KAJIAN PUSTAKA
Bab ini berisikan tentang publikasi penelitian terdahulu, pemaparan teori dasar tentang
sistem, dan komponen yang digunakan dalam rancang bangun alat.
BAB III. METODE PERANCANGAN DAN PEMBUATAN
Bab ini berisikan mengenai blok diagram perancangan alat, penjelasan prinsip kerja
alat, desain sistem rangkaian elektronik, instrumentasi alat dan pemrograman.
BAB IV. PENGUJIAN DAN PEMBAHASAN
Bab ini khusus memaparkan analisis setiap blok diagram rangkaian elektronik serta
data-data hasil pengujian.
BAB V. KESIMPULAN DAN SARAN
BAB II
KAJIAN PUSTAKA DAN DASAR TEORI
2.1
Kajian Pustaka
Rancang bangun alat dan pembuatan sistem yang menggunakan jenis sensor
accelerometer
banyak diminati dan dikembangkan. Beberapa studi penelitian yang
sebelumnya dilakukan yaitu, “
Aplikasi Sensor Accelerometer pada Deteksi Posisi
”
(Vidi Rahman Alma’i, 2011). “
Implementasi Penggunaan Sensor Accelerometer
ADXL335 pada Quadcopter Robot Berbasis ATMega32
” (Pancev, dkk, 2013). “
Design
of a Low Cost Motion Data Acquisition Setup for Mechatronics System
” (Baris Can
Yalcin, 2014).
Studi-studi penelitian di atas menitikberatkan pengembangan alat untuk menopang
kestabilan pada sebuah sistem dengan menggunakan sensor
accelerometer gyroscope
dan berbasis mikrokontroler sebagai pengolah datanya.
2.2
Dasar Teori
2.2.1
Fotografi
Fotografi (dari bahasa Inggris:
photography
, yang berasal dari kata Yunani yaitu
“
photos
”: cahaya dan “
grafo
”: melukis/menulis) merupakan proses seni melukis
melalui media cahaya dengan alat yang disebut kamera dengan maksud dan tujuan
tertentu (Kamus Besar Bahasa Indonesia).
Kamera adalah alat paling populer dalam akitivitas fotografi. Nama ini didapat dari
“
camera obscura
”, bahasa latin untuk ruang gelap. Kamera merupakan suatu piranti
untuk membentuk dan merekam suatu bayangan potret pada lembaran film.
Dunia fotografi terus menunjukkan peningkatan karena jenis kamera yang
digunakan mengalami perkembangan dari segi bentuk, fungsi, dan cara kerjanya. Mulai
dari kamera analog yang prinsip kerjanya menggunakan roll film dan hasil potretnya
akan didapatkan dari hasil pencucian. Lalu ada kamera polaroid yang lebih lama
beredar dibanding analog karena kamera jenis ini tidak memerlukan pencucian untuk
mendapatkan hasil potretnya. Terlebih lagi di jaman modern sekarang, kamera beralih
ke kamera digital dimana hasil potret bisa disimpan
file
-nya secara digital ke
PC
atau
memory card.
2.2.1.1 Tripod
Bermula dari perkembangan kamera dan penggunanya yang semakin banyak, tripod
diciptakan sebagai salah satu alat untuk membantu dalam penggunaan kamera. Tripod
digunakan untuk menopang agar badan kamera bisa berdiri dengan tegak dan kokoh.
Hal ini dimaksudkan untuk mengurangi kelelahan fotografer dalam mengambil gambar
dan mengurangi ketidaksempurnaan yang ditimbulkan oleh guncangan tangan
fotografer.
Selain itu fungsi-fungsi tripod yang lain, diantaranya:
Berguna untuk pemotretan
long exposure
atau
shutter
rendah.
Membantu menghasilkan foto
HDR (High Dynamic Range).
Membantu mencapai
angle
sulit dalam pemotretan
landscape.
Membantu mempertajam gambar saat melakukan
focal length
panjang.
2.2.2
Sensor
A
ccelerometer
MPU-6050
Accelerometer
adalah sensor yang digunakan untuk mengukur percepatan suatu
objek, yaitu mengukur percepatan statis dan dinamisnya. Pengukuran dinamis adalah
pengukuran percepatan pada objek bergerak, sedangkan pengukuran statis adalah
pengukuran terhadap gravitasi bumi, lebih tepatnya untuk mengukur sudut kemiringan.
Prinsip kerja dari sensor
accelerometer
berdasarkan hukum fisika bahwa apabila suatu
konduktor digerakkan melalui suatu medan magnet, atau jika suatu medan magnet
digerakkan melalui suatu konduktor, maka akan timbul suatu tegangan induksi pada
konduktor tersebut.
Accelerometer
yang diletakkan di permukaan bumi dapat
mendeteksi percepatan 1g (ukuran gravitasi bumi) pada titik vertikalnya, untuk
percepatan yang dikarenakan oleh pergerakan horizontal maka
accelerometer
akan
mengukur percepatannya secara langsung ketika bergerak secara horizontal.
Accelerometer
MPU-6050 adalah sebuah modul berinti MPU-6050 yang
merupakan 6 axis
Motion Processing Unit
dengan penambahan regulator tegangan dan
beberapa komponen pelengkap lainnya yang membuat modul ini siap pakai dengan
tegangan
supply
sebesar 3-5 VDC. Modul ini memiliki
interface
I2C yang dapat
disambungkan langsung ke MCU (
Microcontroller Units
) yang memiliki fasilitas I2C.
Sensor MPU-6050 berisi sebuah
Microelectromechanical Systems
(MEMS)
Gambar 2.3
Sensor MPU-6050
Fitur dan spesifikasi dari modul MPU-6050 adalah berikut ini:
Berbasis Chip MPU-6050, berteknologi
MotionFusion
yang mengoptimalkan
kinerja sensor dan adanya
Digital Motion Processor
modul dapat diintegrasikan
dengan sensor lainnya melalui komunikasi I2C dan bekerja tanpa membebani
mikrokontrolernya.
Tegangan
supply
sekitar 3-5 VDC dan pada modul ini sudah dilengkapi LDO
(
Low Drop-out
)
Voltage Regulator
. Jadi, untuk mendapat sumber tegangan
hanya perlu tersambung dengan sumber Vcc pengolah data seperti Arduino.
Tersedianya
pull-up
resistor pada pin SDA dan SCL tanpa resistor eksternal
tambahan.
Gyroscope Range
+ 250 500 1000 2000 / s
Acceleration Range
: + 2 + 4 + 8 + 16 g
Data keluaran
MotionFusion
sebanyak 6 atau 9 sumbu dalam format matriks
rotasi,
quarternion
, sudut
Euler
, atau
raw data format
.
Memori penampung data (
buffer memory
) sebesar 1KB, FIFO (
First-In-First-Out
).
Konsumsi arus
gyroscope
sebesar 3,6 mA;
gyroscope
+
accelerometer
3,8 mA.
Chip
built-in
16 bit AD
converter
, 16 bits data
output
Jarak antarpin
header
2.54 mm
Dimensi modul 20.3 mm x 15.6 mm
Sensor ini sudah banyak dijual di pasaran dengan harga yang relatif murah.
2.2.3
Komunikasi I2C
Sebuah standar komunikasi serial dua arah menggunakan dua saluran yang didesain
khusus untuk mengirim maupun menerima data. Sistem
Inter-Integrated Circuit
(I2C)
terdiri dari dua saluran, yaitu SCL (
Serial Clock
) dan SDA (
Serial Data
) yang
membawa informasi data antara I2C dengan pengontrolnya. Piranti yang dihubungkan
dengan sistem I2C bus dapat dioperasikan sebagai
Master
dan
Slave
.
Master
adalah
piranti yang memulai transfer data pada I2C bus dengan membentuk sinyal start,
mengakhiri transfer data dengan membentuk sinyal stop dan membangkitkan sinyal
clock.
Sinyal start merupakan sinyal untuk memulai semua perintah, didefinisikan sebagai
prubahan tegangan SDA dari logika “
HIGH
” menjadi ”
LOW
” pada saat SCL bernilai
“
HIGH
”. Sinyal stop merupakan sinyal untuk mengakhiri semua perintah, didefinisikan
sebagai perubahan tegangan SDA dari “
LOW
” menjadi “
HIGH
” pada saat SCL bernilai
“
HIGH
”.
Sinyal dasar yang lain dalam I2C bus adalah sinyal
acknowledge
yang disimbolkan
dengan ACK setelah transfer data oleh
Master
berhasil diterima
Slave
.
Slave
akan
menjawab dengan mengirim sinyal
acknowledge
, yaitu dengan membuat SDA menjadi
“
LOW
” selama siklus clock ke-9. Hal ini menunjukkan bahwa
Slave
telah menerima 8
bit dari
Master
.
Dalam melakukan transfer data I2C bus, harus mengikuti tata cara yang ditetapkan
yaitu:
a.
Transfer data hanya dapat dilakukan ketika bus tidak dalam keadaan sibuk.
b.
Selama proses transfer data, keadaan data pada SDA harus stabil selama
SCL dalam keadaan “
HIGH
”. Keadaan perubahan “
HIGH
” atau “
LOW
”
pada SDA hanya dapat dilakukan selama SCL dalam keadaan rendah. Jika
terjadi perubahan keadaan SDA pada saat SCL dalam keadaan “
HIGH
”,
maka perubahan itu dianggap sebagai sinyal start atau stop.
2.2.4
Motor DC
Gambar 2.5
Motor DC
Pada motor DC dibedakan 2 komponen utama berdasarkan fisiknya, yaitu:
a.
Rotor, adalah bagian yang bergerak/berputar.
b.
Stator, adalah bagian yang tidak bergerak/berputar.
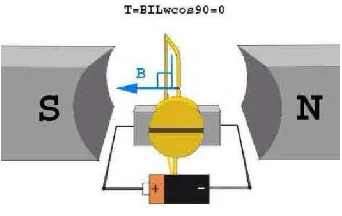
Gambar 2.6
Struktur motor listik
Berdasarkan gambar 2.6 di atas, rotor motor listrik ditunjukkan dengan sebuah
kawat angker penghantar listrik (
armature
) berbentuk persegi panjang. Pada kedua
ujung kawat
armature
terpasang komutator berbentuk lingkaran yang terbelah di
tengahnya. Komponen ini disebut dengan cincin belah. Cincin belah termasuk bagian
dari rotor, sehinggan dia ikut berputar dengan rotor.
Sumber tegangan DC diilustrasikan dengan sebuah baterai yang masing-masing
kutub baterai terhubung dengan sikat karbon, sehingga tercipta arus DC dengan arah
arus dari kutub positif ke negatif melewati sikat karbon, satu bagian dari cincin belah,
armature
, kembali ke bagian lain cincin belah, sikat karbon lalu kutub negatif baterai.
Konsep kaidah tangan kiri berguna untuk memahami bagaimana cara motor DC
bekerja.
Gambar 2.7
Perputaran motor (1)
Dimulai dengan gambar 2.7 di atas, garis medan magnet disimbolkan dengan garis
biru. Untuk arah arus listrik disimbolkan dengan garis warna hitam. Jika digunakan
kaidah tangan kiri pada sisi kiri
armature
, maka akan didapatkan gaya dorong yang
mengarah ke atas. Sedangkan untuk sisi kanan
armature
, kaidah tangan kiri akan
menunjukkan bahwa gaya dorong mengarah ke bawah. Gaya dorong yang tegak lurus
langsung terhadap
armature
sisi kanan dan kiri ini menghasilkan torsi yang paling
besar pada rotor motor. Gaya torsi inilah yang memutar rotor motor.
Pada posisi rotor pada gambar 2.8, cincin belah masih terhubung dengan sikat
karbon sehingga arah arus listrik tidak berubah. Karena posisi
armature
berubah, gaya
torsi yang dihasilkan lebih kecil. Namun, gaya torsi ini masih membuat rotor berputar.
Gambar 2.9
Perputaran motor (3)
Pada gambar 2.9, torsi rotor akan menjadi nol ketika
armature
pada posisi tegak.
Hal ini sesuai dengan kaidah tangan kiri, bahwa jika pada
armature
terdapat arus listrik
maka arah gaya dorong kawat juga ke atas maupun ke bawah. Namun karena gaya
tersebut segaris dengan titik poros motor, atau tegak lurus dengan arah putaran motor,
maka tidak akan timbul gaya torsi pada
armature
. Tapi nilai torsi yang nol ini tidak
membuat rotor motor berhenti berputar. Karena sifat kelembaman rotor maka rotor
akan terus berputar selama masih ada arus listrik yang mengalir pada
armature
.
2.2.5
Motor Driver
L298N
Merupakan sebuah
motor driver
berbasis IC L298
dual H-bridge
.
Motor driver
ini
berfungsi untuk mengatur arah ataupun kecepatan motor DC. Diperlukannya rangkaian
Gambar 2.10
Motor Driver
L298N
Prinsip kerja
motor driver
ini sesuai dengan bentuk rangkaian transistornya yang
berupa
H-bridge
.
Gambar 2.11
H-bridge
Transistor
Motor driver
ini bekerja untuk menggerakan maksimal 2 motor DC terpisah atau
bisa digunakan untuk 1 motor stepper bipolar 2 fasa, menggunakan masukan
logic-level
dari Arduino atau jenis kit mikrokontroler yang lain.
Pin-pinnya terdiri dari:
Out 1, Out 2 : mengatur/menjalankan motor DC A
Out 3, Out 4 : mengatur/menjalankan motor DC B
GND
: penghubung ground
5V
: sumber suplai tegangan 5V ke modul
In1, In2
: mengatur masukan ke motor DC A
In3, In4
: mengatur masukan ke motor DC B
EnB
: mengaktifkan PWM untuk motor DC B
Prinsip kerja dari motor driver L298N dapat ditunjukkan melalui tabel-tabel di
bawah berikut ini.
T
abel 2.1
Prinsip Kerja Motor Driver L298N Untuk Keluaran Motor A
Input Logika
Keluaran Motor
In1
In2
0
1
Motor A berputar searah jarum jam (CW)
1
0
Motor A berputar berlawanan arah jarum jam (CCW)
1
1
Motor A tidak berputar
0
0
Motor A tidak berputar
Tabel 2.2
Prinsip Kerja Motor Driver L298N Untuk Keluaran Motor B
Input Logika
Keluaran Motor
In3
In4
0
1
Motor B berputar searah jarum jam (CW)
1
0
Motor B berputar berlawanan arah jarum jam (CCW)
0
0
Motor B tidak berputar
Spesifikasi yang dimiliki modul ini:
Double H-bridge Drive
Chip berupa L298N
Logical voltage
: 5V
Drive voltage
: 5V-35V
Logical current
: 0-36mA
Drive current
: 2A
Max power
: 25W
Dimensi: 43 x 43 x 26mm
Berat: 26g
2.2.6
Mikrokontroler ATMega328
a.
Mikrokontroler
Mikrokontroler, sering dikenal dengan sebutan MCU (
Microcontroller Units
)
adalah computer yang berukuran mikro dalam satu chip IC (
Integrated Circuit
) yang
terdiri dari prosessor,
memory
, dan antarmuka yang bisa diprogram. Dapat dikatakan
sebagai komputer mikro karena di dalamnya sudah terdapat CPU (prosessor),
memory
,
dan I/O (
Input/Output
) yang bisa dikontrol dan diprogram. I/O juga sering disebut
GPIO (
General Purpose Input Output
) yang berarti pin yang dapat diprogram sesuai
kebutuhan.
b.
Gambaran Umum
lain ATMega8, ATMega8535, ATMega16, dan ATMega32. Yang membedakan antara
mikrokontroler satu dan yang lain adalah ukuran
memory
, banyaknya GPIO, peripherial
(
USART, timer, counter
, dll).
Gambar 2.12
ATMega328
Karakteristik yang dimiliki ATMega328 antara lain:
Memiliki EEPROM (
Electrically Erasable Programmable Read Only Memory
)
sebesar 1KB sebagai tempat penyimpanan data semi permanen karena
EEPROM tetap dapat menyimpan data meskipun catu daya dimatikan.
Memiliki SRAM (
Static Random Acces Memory
) sebesar 2KB.
Memiliki pin I/O sebanyak 14 pin, 6 diantaranya PWM (
Pulse Width
Modulation
)
output
.
32 x 8-bit register serbaguna.
Dengan clock 16 MHz kecepatan mencapai 16 MIPS.
32KB
Flash Memory
dan pada arduino memiliki
bootloader
yang menggunakan
2KB dari
Flash Memory
tersebut.
130 macam instruksi yang semuanya mampu di eksekusi dalam satu siklus
clock.
ATMega328 memiliki ukuran fisik lebih kecil dibandingkan jenis ATMega
keluarganya. Untuk segi ukuran memori dan peripherialnya relatif sama seperti
ATMega8535 dan ATMega32. Namun jumlah GPIO dari ATMega328 ini lebih sedikit
dibandingkan ATMega jenis-jenis diatas.
Gambar 2.13
Pin-pin ATMega328
ATMega328 memiliki 3 buah PORT utama yaitu PORTB, PORTC, dan PORTD
dengan total GPIO sebanyak 23 pin. PORT tersebut dapat difungsikan sebagai
input/output digital atau peripherial lainnya.
Port B
Port B merupakan jalur data 8 bit yang dapat difungsikan sebagai input/output.
Selain itu port B memiliki fungsi alternatif seperti:
a.
ICP1 (PB0), berfungsi sebagai
Timer/Counter
1 input capture pin.
b.
OC1A (PB1), OC1B (PB2), dan OC2 (PB3) dapat difungsikan sebagai PWM
(
Pulse Width Modulation
).
c.
MOSI (PB3), MISO (PB4), SCK (PB5), SS (PB2) merupakan jalur komunikasi
SPI (
Serial Peripherial Interface
).
e.
XTAL1 (PB6) dan XTAL2 (PB7) merupakan sumber clock utama pada
mikrokontroler.
Port C
Port C merupakan jalur data 7 bit yang dapat difungsikan sebagai
input/output
digital. Fungsi alternatif port C antara lain:
a.
ADC6
channel
(PC0, PC1, PC2, PC3, PC4, PC5) dengan resolusi sebesar 10
bit. ADC dapat kita gunakan untuk mengubah
input
yang berupa tegangan
analog menjadi data digital.
b.
I2C (SDA dan SCL) merupakan salah satu fitur yang terdapat pada port C. I2C
digunakan untuk komunikasi dengan sensor atau
device
lain yang memiliki
komunikasi data tipe I2C seperti sensor kompas dan
accelerometer
.
Port D
Port D merupakan jalur data 8 bit yang masing-masing pinnya dapat difungsikan
sebagai
input/output
. Sama seperti port B dan port C, port D memiliki fungsi alternatif
berikut:
a.
USART (TXD dan RXD) merupakan jalur data komunikasi serial dengan level
sinyal TTL. Pin TXD berfungsi untuk mengirim data serial, sedangkan RXD
berfungsi sebagai penerima data serial.
b.
Interrupt
(INT0 dan INT1) merupakan pin dengan fungsi khusus sebagai
interupsi
hardware
. Interupsi biasanya digunakan sebagai selaan dari program,
misalnya saat sistem berjalan kemudian terjadi interupsi
hardware/software
maka program utama akan berhenti dan menjalankan program interupsi.
d.
T0 dan T1 berfungsi sebagai masukan
Counter
eksternal untuk
Timer
1 dan
Timer
0.
e.
AIN0 dan AIN1 keduanya merupakan masukan untuk analog komparator.
2.2.7
Arduino UNO
Arduino merupakan sebuah
platform
komputasi fisik (
Physical Computing
) yang
open source
, pada board input/output yang sederhana, berbasis pada
software
dan
hardware
maupun lingkungan pemrogramannya/IDE-nya (
Integrated Development
Environment
) yang fleksibel dan mudah digunakan. Hardware-nya memiliki prosesor
Atmel AVR dan software-nya memilki bahasa pemrograman sendiri. Bahasa yang
dipakai Arduino bukan
assembler
yang sulit, tetapi bahasa C yang disederhanakan
dengan bantuan
libraries
Arduino. Kelebihan dari Arduino yaitu tidak direpotkannya
dengan rangkaian minimum sistem dan
programmer
karena hal tersebut sudah
built-in
di dalam board sehingga hanya memerlukan pengembangan sistem untuk lebih lanjut.
Ada banyak jenis Arduino yang dapat digunakan untuk tujuan yang berbeda.
Beberapa jenis memiliki ukuran, jumlah pin, dan mikrokontroler yang berbeda, namun
sebagian besar Arduino memilki komponen utama yang sama, yaitu:
USB/
Barrel Jack
Pin
Tombol
reset
LED indikator daya
TX/RX LED
IC utama
Arduino sendiri memiliki berbagai macam jenis sesuai dengan fungsi dan
kegunaannya. Arduino USB contohnya. Arduino jenis ini menggunakan USB sebagai
antarmuka pemrograman atau komunikasi komputer. Ada juga Arduino Serial, yang
menggunakan RS323 sebagai antarmuka pemrogramannya. Arduino UNO merupakan
salah satu jenis dari Arduino USB.
Gambar 2.14
Arduino UNO
Arduino UNO adalah board mikrokontroler berbasis ATMega328 yang memiliki 14
pin input dari output digital dimana 6 pin input tersebut dapat digunakan sebagai output
PWM (
Pulse Width Modulation
) dan 6 pin input analog, 16 MHz osilator Kristal,
koneksi USB,
jack power
, ICSP
header
, dan tombol
reset
. Kelebihan Arduino
diantaranya adalah tidak perlu perangkat chip
programmer
karena di dalamnya sudah
ada
bootloader
yang akan menangani
upload
program dari komputer. Cukup hanya
menghubungkan kabel USB dari Arduino UNO ke komputer. Berikut adalah spesifikasi
lengkapnya:
Mikrokontroler Atmega328
Catu Daya 5V
Tegangan Input (rekomendasi) 7-12V
Teganan Input (batasan) 6-20V
Pin I/O Digital 14 (dimana 6pin diantaranya disediakan untuk PWM)
Pin Input Analog 6
Arus DC per Pin I/O 40 mA
Flash Memory 32 KB (Atmega328) dimana 0.5 KB digunakan oleh
bootloader
SRAM 2 KB (Atmega328)
EEPROM 1 KB (Atmega328)
Clock Speed
16 MHz
2.2.8
Catu Daya
Catu daya selalu diperlukan dalam setiap rangkaian elektronik agar dapat berfungsi.
Catu daya berfungsi memberikan daya pada peralatan elektronik. Ada 2 jenis catu daya
yang ditemukan di pasaran.
a.
Catu daya tetap; rangkaian ini memiliki tegangan yang tidak bisa diatur dan
nilainya sudah ditetapkan untuk rangkaian tersebut.
b.
Catu daya variabel; dimana catu daya ini memiliki nilai tegangan yang dapat
diubah-ubah.
Rangkaian catu daya yang baik memiliki regulator di dalam rangkaiannya.
Pemasangan regulator difungsikan untuk memberikan kestabilan pada tegangan yang
keluar, apabila terjadi perubahan nilai tegangan yang diterima oleh rangkaian catu daya
tersebut.
2.2.9
Switching Regulator
Dalam penelitian ini digunakan switching regulator jenis XM1584
Ultra-small Size
DC-DC Step Down Power Supply module
yang terintegrasi. Sebagaimana
spesifikasinya dapat dilihat di bawah ini:
a.
Tegangan input: 4,5~28V
b.
Output tegangan: 0,8~20V
c.
Output arus maksimal 3A
d.
Efisiensi mencapai 92%
e.
Switch frequency
1,5MHz(Max), 1MHz(Typ)
f.
Operating temperature
: -20 to +85
g.
Dimensi: 22mm x 17mm x 4mm
Gambar 2.15
Switching Regulator
Regulator ini dipilih karena memiliki kelebihan berupa bentuk fisik yang ringan
(
Ultra-small size
), efisiensi yang tinggi hingga melebihi 80%, isolasi dari transien
jala-jala lebih baik, dan harganya murah.
2.2.10
Kabel
kabel jumper sebagai penghantar arus dan tegangannya, karena arus dan tegangan yang
dipakai biasanya kecil.
Gambar 2.16
Kabel
Berbeda dengan penggunaan kabel pada instalasi listrik maupun jaringan komputer,
kabel jumper ini secara fisik memiliki ukuran yang sangat kecil dan tidak terlalu
panjang. Pada kedua ujungnya, terdapat soket terminal bertipe
female
atau
male
. Kabel
jenis ini lebih spesifik lagi digunakan untuk menghubungkan pin-pin pada rangkaian
elektronik seperti board mikrokontroler atau rangkaian lainnya.
BAB III
METODE PERANCANGAN DAN PEMBUATAN
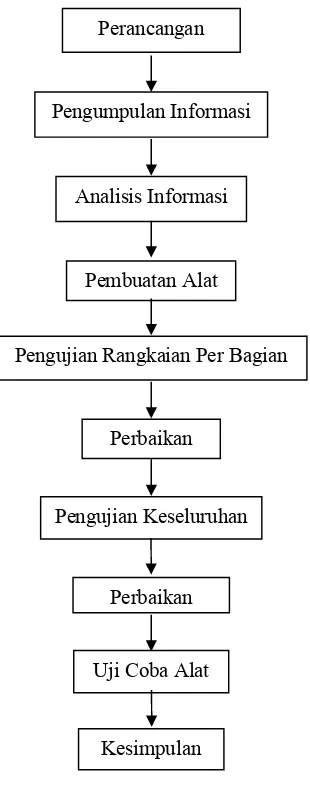
3.4 Diagram Alur Penelitian
[image:42.595.230.385.247.640.2]Blok diagram penelitian yang dilakukan dapat dilihat pada gambar berikut.
Gambar 3.4
Diagram Blok Penelitian
Pengumpulan Informasi
Pembuatan Alat Perancangan
Kesimpulan Analisis Informasi
Pengujian Rangkaian Per Bagian
Perbaikan
Perbaikan Pengujian Keseluruhan
3.4.4 Uraian Diagram Blok
1.
Perancangan
Penelitian dimulai dengan perencanaan awal mengenai bentuk fisik dan
sistem mekanik dari alat.
2.
Pengumpulan Informasi
Pengumpulan informasi mencakup data-data dan informasi yang didapat
secara literature (melalui buku) maupun networking mengenai bahan dan
komponen yang dibutuhkan.
3.
Analisis Informasi
Setelah proses pengumpulan informasi, dilakukan proses analisis berupa
menentukan bentuk, bahan dan komponen yang akan dipakai.
4.
Pembuatan Alat
Pembuatan alat mencakup pembuatan mekanik, elektronik, dan merangkai
komponen.
5.
Pengujian Rangkaian Per Bagian
Proses ini merupakan pengujian terhadap rangkaian-rangkaian secara
terpisah yang belum dibentuk menjadi alat seutuhnya.
6.
Perbaikan
Perbaikan dilakukan apabila pada proses pengujian rangkaian per bagian
tidak bekerja semestinya.
7.
Pengujian Keseluruhan
Pengujian keseluruhan yaitu pengujian rangkaian-rangkaian per bagian yang
telah disatukan dan memiliki sistem yang sudah diatur.
Perbaikan dilakukan apabila setelah sistem keseluruhan dijalankan namun
belum membuahkan hasil yang diinginkan.
9.
Uji Coba
Setelah pengujian dan perbaikan dilakukan, pada tahap ini alat akan diuji
coba dan diukur kemampuannya dalam menjalankan sistem yang disetting,
apakah sudah sesuai dengan harapan atau tidak.
10.
Kesimpulan
Berisi hasil akhir dari penelitian.
3.2 Perancangan
Penelitian ini dilakukan berdasarkan permasalahan pengaturan pada kaki tripod.
Pengaturan yang dilakukan biasanya secara manual memiliki kelemahan berupa
kurangnya akurasi keseimbangan pada kaki tripod sehingga menyebabkan tripod itu
sendiri kurang seimbang. Ketersediaan
waterpass
pada tripod juga dinilai kurang
membantu karena penggunaannya berdasarkan masing-masing individu untuk
mengatur keseimbangan tripod. Maka, solusi yang dibutuhkan adalah merancang
sistem
self-leveling
pada kaki tripod secara otomatis.
Sistem-sistem yang terdapat pada perancangan ini secara umum terdiri dari:
a.
Sistem pendeteksi kemiringan; berisi sensor
accelerometer
yang diletakkan dan
direkatkan pada bagian tripod, sehingga ketika tripod mengalami kemiringan
maka sensor langsung bekerja mendeteksi besarnya kemiringan pada tripod.
b.
Sistem pengolah input; berisi mikrokontroler yang mengolah input yaitu, data
dari sensor accelerometer.
d.
Sistem output; berupa motor DC yang dipasang pada kaki tripod dan bekerja
sesuai suplai dari motor driver.
Sistem-sistem di atas akan membentuk suatu sistem keseluruhan berupa sistem
closed-loop
yang dapat diamati dalam bentuk diagram seperti gambar di bawah.
Feedback
Gambar 3.2
Diagram
Closed-Loop
Keterangan:
1)
Input merupakan masukan berupa besar nilai kemiringan yang diterima oleh
sistem.
2)
Kontroler berupa sistem pengolah input, yaitu mikrokontroler.
3)
Plant, yang merupakan pemrosesan setelah input diterima oleh kontroler,
dimana pada sistem ini akan berupa pengolah output yaitu motor driver.
4)
Output merupakan keluaran dari sistem yang berupa perputaran motor DC.
5)
Feedback adalah umpan balik ketika output yang dihasilkan belum memenuhi
kondisi sistem, dan umpan balik tersebut akan diterima oleh sensor supaya
diproses kembali oleh kontroler. Proses ini akan berlangsung berulang kali
(
closed-loop
) hingga output yang dihasilkan sudah memenuhi kondisi.
3.2.4 Proses Perancangan Mekanik
Prototyping
merupakan proses perancangan sistem yang dibentuk dari 2 bagian,
yaitu bagian
hardware
(perangkat keras) dan
software
(perangkat lunak). Merancang
bentuk mekanik dari sistem
self-leveling
tripod ini merupakan bagian dari
hardware
sistem. Mekanik sistem ini tersusun dari tripod, dan 3 buah motor DC yang
masing-masing akan dipasang di ketiga kaki tripod.
3.2.2 Proses Perancangan Elektronik
Perangkat elektronik juga merupakan bagian dari
hardware
sistem. Merancang
bagian ini penting karena berisi komponen-komponen yang mengolah program dan
menentukan bagaimana jalan kerja dari sistem
self-leveling
tripod tersebut. Maka, perlu
ditentukan apa saja komponen-komponen yang dapat bekerja sesuai dengan fungsi dan
kebutuhannya.
3.2.2.4 Perancangan Mikrokontroler
Mikrokontroler yang bekerja sebagai pengolah program algoritma untuk sistem ini
digunakan kit dari Arduino yaitu Arduino UNO. Arduino ini memiliki IC berupa
ATMega328 yang bekerja dengan suplai tegangan sebesar 5V dan memadai untuk
penggunaanya dalam sistem ini. Dalam sistem ini digunakan Arduino UNO R3 yang
merupakan keluaran terbaru dari seri Arduino UNO.
3.2.2.2 Sensor MPU-6050
Sensor yang digunakan dalam sistem adalah sensor MPU-6050, yang merupakan
sensor kombinasi dari
accelerometer
dan
gyroscope
. Pendeteksian dengan sensor ini
akan menghasilkan nilai-nilai dalam 3, 6, ataupun 9 sumbu. Nilai-nilainya bisa berupa
format matriks rotasi,
quarternion
, sudut
Euler
dan data mentah (
raw data
). Nilai
tersebut sudah dalam bentuk digital.
3.2.2.3 M
otor Driver
L298N
buah motor DC. Suplai tegangan untuk
motor driver
akan didapatkan dari sebuah
rangkaian catu daya secara eksternal sebesar 12V.
3.2.2.4 Rangkaian Catu Daya
Sumber tegangan DC yang digunakan untuk rangkaian dapat diperoleh melalui alat
Power Supply, Adaptor, maupun rangkaian baterai. Power Supply merupakan catu daya
jenis variable karena besar tegangan dan arusnya dapat diubah-ubah, sedangkan
Adaptor dan rangkaian baterai memiliki nilai tegangan dan arus yang tetap. Jadi, untuk
menggunakan Power Supply sebagai sumber tegangan DC hanya perlu disetting
sebesar 12VDC. Untuk Adaptor dipastikan memiliki keluaran tegangan 12VDC.
Sedangkan untuk rangkaian baterai diperlukan beberapa buah baterai isi ulang dan
rangkaian tambahan untuk sistem auto-charge baterai.
3.2.3 Perancangan Software
Sebagaimana disebutkan sebelumnya, mikrokontroler yang digunakan adalah kit
Arduino yaitu jenis Arduino UNO, maka
software
yang akan dibutuhkan dalam
pengolahan algoritma programnya juga merupakan
software
bawaan Arduino yang
dinamakan Arduino IDE (
Integrated Development Environment
). Tidak seperti
software
lain yang menggunakan bahasa C atau C++, Arduino memiliki bahasa
pemrogramannya sendiri yang tergolong lebih mudah dan karena bersifat
open-source
,
libraries
-nya dapat didapatkan dengan mudah dan lengkap melalui situs-situs internet.
Kode programnya bukan dinamakan “
source code
” seperti pada
software
pengolah
mikrokontroler lainnya, tapi disebut dengan istilah “
sketch
”. Interface Arduino IDE
tampak seperti gambar berikut.
3.3 Pembuatan Alat
Sesudah perancangan sistem, pembuatan sistem untuk merealisasikan alat tersebut
akan dilakukan sesuai dengan bagian-bagian yang sudah ditetapkan. Bagian
hardware
yang meliputi perangkat mekanik dan elektronik, sedangkan bagian
software
meliputi
perangkat lunak yang diinstal pada PC/komputer. Kebutuhan alat dan bahannya secara
rinci akan dibahas pada subbab berikutnya.
3.3.4 Alat dan Bahan
Untuk membuat keseluruhan sistem
self-leveling
ini dibutuhkan alat dan bahan
berupa:
a.
PC (
Personal Computer
). PC digunakan sebagai media instalasi Arduino IDE,
mengolah, menulis, maupun mengedit
sketch
pada
software
Arduino IDE serta
meng-upload
sketch
tersebut ke
flash memory
ATMega328 di dalam Arduino
UNO.
b.
Tripod. Tripod sebagai bahan utama dalam pembuatan sistem
self-leveling
ini.
Masing-masing kaki tripod akan dilakukan modifikasi dengan motor DC
sehingga akan bergerak memanjang dan memendek sesuai dengan program
yang dibuat.
c.
Multimeter
. Merupakan alat untuk mengukur dan mengecek jalur tegangan dan
arus yang mengalir pada rangkaian sehingga apabila terjadi kesalahan berupa
konsleting, menyebabkan rangkaian rusak, dapat dicegah dan diminimalisasi.
d.
Osiloskop. Osiloskop adalah alat ukur elektronik yang berfungsi untuk
memproyeksikan bentuk sinyal listrik agar dapat dilihat dan dipelajari. Untuk
pembuatan sistem ini, osiloskop digunakan untuk menganalisis aliran tegangan
dan arus apakah mengalami tingkah laku yang tidak wajar, seperti adanya
lonjakan tegangan, dapat diamati melalui osiloskop.
1.
IC ATMega328 yang terintegrasi dalam Arduino UNO R3
2.
Sensor MPU-6050
3.
Motor Driver
L298N
4.
Motor DC
5.
Kapasitor milar 100 nF
6.
Switching
regulator
Komponen pembantunya berupa:
1.
Kabel dan kabel jumper
Male-Female
2.
Baut berdiameter 6 mm sepanjang 1 m dan murnya
3.
Papan triplek
4.
Papan akrilik
5.
Tutup pipa pvs ¼ inch
6.
Lempengan alumunium
f.
Alat-alat seperlunya yang membantu untuk memasang komponen pada
tempatnya:
1.
Bor
2.
Obeng
3.
Tang
4.
Solder dan tinol
5.
Gunting
6.
Selotip dan lakban bolak-balik
3.3.2 Pembuatan Hardware
Hal yang dilakukan pertama setelah menganalisis alat dan bahan adalah melakukan
proses pembuatan
hardware
, yang terdiri dari pembuatan rangkaian elektronik dan
mekanik.
3.3.2.4 Pembuatan Rangkaian Elektronik
Sistem
self-leveling
pada kaki tripod ini dibangun menggunakan alat dan bahan
yang sudah dijabarkan sebelumnya. Komponen-komponen tersebut kemudian disusun
sesuai dengan letak dan fungsinya masing-masing. Secara garis besar, diagram blok
dari rangkaian elektroniknya dapat dilihat pada gambar berikut.
Gambar 3.4
Blok Diagram Perangkat Elektronik
Ketika permukaan tanah yang tidak rata/sejajar menyebabkan kedudukan tripod
mengalami kemiringan, sensor MPU-6050 bekerja mendeteksi besarnya kemiringan.
Hasil pendataan oleh sensor tersebut berupa nilai-nilai dalam 3, 6 atau 9 sumbu. Untuk
memudahkan penggunaan logika pada algoritma programnya, dipilih menggunakan
nilai dalam 3 sumbu berupa matriks rotasi yaitu
yaw, pitch
, dan
roll
. Pergerakan sensor
MPU-6050 dapat dianalogikan dan diilustrasikan dengan pergerakan pesawat terbang
pada gambar berikut.
Sensor MPU-6050
Motor driver L298N
Motor DC/perangkat
mekanik
Catu daya 12V
Gambar 3.5
Gerak
Yaw
Yaw
merupakan pergerakan rotasi terhadap sumbu normal (sumbu Y) sehingga
menghasilkan gerakan pesawat berbelok ke samping kanan atau kiri.
Gambar 3.6
Gerak
Pitch
Pitch
merupakan pergerakan rotasi terhadap sumbu lateral (sumbu X) sehingga
menghasilkan gerakan pesawat berguling ke depan (membungkuk) ataupun ke
belakang.
Roll
merupakan pergerakan rotasi terhadap sumbu longitudinal (sumbu Z) sehingga
menghasilkan gerakan pesawat berguling ke samping kanan atau kiri. Ketiga gerakan
tersebut sama halnya dengan gerakan yang dapat diaplikasi pada sensor MPU-6050.
Implementasi gerakan
yaw, pitch
, dan
roll
terhadap tripod dapat dilihat melalui
ilustrasi berikut ini, dengan ketentuan bahwa kaki tripod bagian depan ditandai dengan
tulisan “DEPAN” pada bagian kakinya (apabila diaplikasikan dengan kamera maka
kamera akan menghadap sesuai dengan arah kaki “DEPAN”) dan sisanya akan mudah
untuk menentukan bagian kanan dan kirinya.
[image:52.595.242.393.283.488.2]Gambar 3.8
Bagian-bagian Kaki Tripod
Dalam pembuatan sistem
self-leveling
ini hanya digunakan 2 buah nilai yaitu
pitch
Gambar 3.9
Ilustrasi
Pitch
(1)
[image:53.595.232.387.361.568.2]
Gambar 3.44
Ilustrasi
Roll
(1)
Gambar 3.42
Ilustrasi
Roll
(2)
nilai
pitch
ke arah positif (+1), sedangkan pada ilustrasi
pitch
(2) perubahan nilai
pitch
ke arah negatif (-1).
Gambar 3.10 dan gambar 3.11 menunjukkan bahwa ketika posisi tripod mengalami
kemiringan sedemikian rupa, maka nilai
roll
-lah yang berubah-ubah. Sama seperti nilai
pitch
, nilai
roll
berubah ke arah positif dan negatif. Gambar ilustrasi
roll
(1)
memperlihatkan perubahan nilai
roll
positif (+1) dan ilustrasi
roll
(2) memperlihatkan
perubahan nilai
roll
negatif (-1).
Kelebihan dari sensor MPU-6050 adalah nilai yang dihasilkan sudah berupa nilai
digital sehingga hasil pendataan dari sensor diterima dan langsung diolah oleh
mikrokontroler ATMega328 tanpa perlu menggunakan ADC (
Analog to Digital
Converter
). Berikut adalah konfigurasi rangkaian sensor MPU-6050 dan Arduino.
Gambar 3.43
Konfigurasi Sensor dan Arduino
Baik sensor maupun Arduino disuplai oleh tegangan dari satu catu daya yang sama
untuk menyuplai tegangan motor, namun menggunakan swtitching regulator sebagai
pengatur tegangannya sehingga dapat dihasilkan tegangan 5VDC untuk dipakai sesuai
kebutuhan. Setelah
sketch
program berjalan maka Arduino akan mengaktifkan motor
DC melalui
motor driver
L298N yang disuplai oleh catu daya 12V.
Seperti yang sudah dijelaskan pada bab sebelumnya,
Motor driver
L298N memiliki
menjalankan 3 buah motor DC diperlukan 2 motor driver; 1 motor driver menjalankan
2 buah motor DC dan motor driver lainnya menjalankan sebuah motor DC. Pada sistem
self-leveling
ini, selain ditentukan bagian depan, kanan dan kiri kaki tripod, ditentukan
pula hal-hal seperti:
1)
Asumsikan motor DC pada kaki depan tripod sebagai Motor 1,
2)
Motor DC pada kaki kiri tripod sebagai Motor 2,
3)
Motor DC pada kaki kanan tripod sebagai Motor 3,
4)
Motor 1 diatur oleh Motor Driver 1,
5)
Sedangkan Motor 2 dan Motor 3 diatur oleh Motor Driver 2.
Tabel 3.4
Nilai Kebenaran Motor Driver 1
Motor Driver 1
Keluaran
In1
In2
In3
In4
1
0
0
0
Motor 1 berputar berlawanan arah jarum jam (CCW)
0
1
0
0
Motor 1 berputar searah jarum jam (CW).
Tabel 3.2
Nilai Kebenaran Motor Driver 2
Motor Driver 2
Keluaran
In1
In2
In3
In4
1
0
0
0
Motor 2 berputar berlawanan arah jarum jam (CCW)
0
0
1
0
Motor 3 berputar berlawanan arah jarum jam (CCW)
0
0
0
1
Motor 3 berputar searah jarum jam (CW)
[image:57.595.225.379.367.553.2]Kedua tabel di atas memperlihatkan output apa saja yang dikendalikan oleh Motor
Driver 1 dan Motor Driver 2. Untuk menentukan arah perputaran dapat dilihat pada
tabel bab sebelumnya yaitu Tabel 2.1 yang menunjukkan prinsip kerja dari motor
driver.
Kelebihan
motor driver
L298N sudah berupa modul yang lengkap dengan regulator
tegangan yaitu berupa kapasitor untuk memfilter tegangan yang lewat. Keseluruhan
komponen tersebut dipasang dalam suatu media yaitu papan triplek berukuran 15 cm x
15 cm dan tiap komponen akan dihubungkan menggunakan kabel jumper.
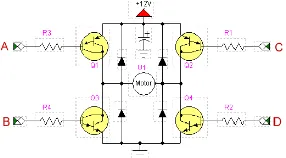
Gambar 3.44
Papan Perangkat Elektronik
Gambar 3.45
Skematik Perangkat Elektronik
Perlu diketahui, pemasangan sensor pada perangkat elektronik harus diperhatikan
tata letaknya karena hal tersebut akan berpengaruh pada pembuatan algoritma
programnya.
3.3.2.2 Pembuatan Sistem Mekanik
Perangkat mekanik dalam sistem self-leveling ini hanya terdiri dari 2 bagian yaitu
tripod dan motor DC. Blok diagram dari perangkat mekanik dapat dilihat pada gambar
berikut.
Gambar 3.46
Blok Diagram Perangkat Mekanik
Seperti yang sudah disebutkan sebelumnya, bahwa keluaran dari motor driver akan
langsung menjalankan motor DC. Motor DC sebanyak 3 buah dipasang masing-masing
pada setiap kaki tripod. Untuk menghubungkan keluaran dari motor driver digunakan
kabel 2 warna yang tersambung ke motor DC. Motor DC tersebut dimodifikasi dengan
Motor driver
L298N/rangkaian
elektronik
baut sepanjang 25 cm yang dipasang di ujung gear motor. Pemasangan baut di motor
DC tersebut dilakukan di tempat pengelasan bubut. Setelah itu, dibantu dengan
penambahan lempengan alumunium sehingga dapat tersangga dengan baik di kaki
tripod.
Gambar 3.47
Pemasangan Motor DC di Kaki Tripod
3.3.3 Pembuatan Program
Agar pembuatan
hardware
untuk sistem dapat bekerja harus disertai dengan suatu
perintah dalam bentuk program
assembly
karena cara kerja dari alat tersebut
sepenuhnya ditangani oleh
software
Arduino IDE. Program terdiri dari
sketch
yang
berisi sekumpulan instruksi untuk mengendalikan mikrokontroler. Berikut adalah
ya
tdk
tdk
tdk
ya
ya
tdk
tdk
ya
ya
[image:60.595.182.516.56.659.2]
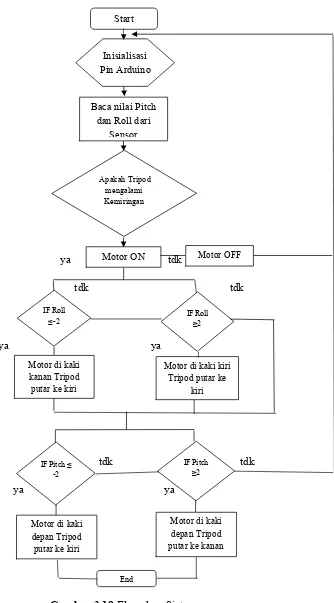
Gambar 3.48
Flowchart
Sistem
Start
Inisialisasi Pin Arduino
Baca nilai Pitch dan Roll dari
Sensor
Apakah Tripod mengalami Kemiringan
Motor OFF
Motor ON
IF Roll ≤-2
Motor di kaki depan Tripod putar ke kanan Motor di kaki
depan Tripod putar ke kiri
Motor di kaki kiri Tripod putar ke
kiri Motor di kaki
kanan Tripod putar ke kiri
End
IF Roll ≥2
IF Pitch ≤ -2
Cara kerja program dimulai dengan proses inisialisasi bit input/output pada
Arduino. Apabila tripod mengalami kemiringan, baik nilai
pitch
atau
roll
akan
mengalami perubahan. Kedua nilai tersebut merupakan nilai matriks rotasi sehingga
nilai yang dihasilkan bukan dalam bentuk satuan sudut (derajat) dan merupakan input
yang akan dibaca oleh mikrokontroler. Setelah mikrokontroler membaca input,
program akan memerintahkan
motor driver
untuk memutar motor DC.
Masing-masing motor DC diberi instruksi berdasarkan perubahan nilai yang
muncul. Sudah ditetapkan pada pembuatan hardware sebelumnya, terdapat kaki tripod
depan, kaki samping kanan dan kaki samping kiri. Begitu juga dengan pemasangan
arah sensor. Kedua hal tersebut menentukan instruksi apa yang akan didapatkan untuk
masing-masing motor DC di kaki tripod. Adapun instruksi-instruksi yang ditulis dalam
sketch program ini, dijelaskan sebagaimana berikut ini:
1.
Tripod dikatakan seimbang (motor DC tidak berputar) apabila sensor
mendeteksi masing-masing; - (nilai toleransi) < nilai pitch < nilai toleransi, dan,
– (nilai toleransi) < nilai roll < nilai toleransi; dimana, nilai toleransi = 2
2.
Ketika terdeteksi nilai roll ≤ -2, maka motor driver memutar motor DC di kaki
samping kanan tripod untuk berputar ke kiri (CCW).
3.
Ketika terdeteksi nilai roll ≥ 2, maka motor driver memutar motor DC di kaki
samping kiri tripod untuk berputar ke kiri (CCW).
4.
Ketika terdeteksi nilai pitch ≤ -2, maka motor driver memutar motor DC di kaki
depan tripod untuk berputar ke kiri (CCW).
5.
Ketika terdeteksi nilai pitch ≥ 2, maka motor driver memutar motor DC di kaki
depan tripod untuk berputar ke kanan (CW).
3.4 Pengujian Sementara
ini percobaan akan dilakukan dengan mengetes kemiringan yang berbeda terhadap
tripod dan diamati perubahan yang terjadi. Dari hasil pengujian tersebut akan
ditentukan apakah alat memerlukan perbaikan atau tidak. Setelah itu baru dilakukan
pengambilan data-data.
3.5 Perbaikan
Hasil pengujian sementara memperlihatkan sistem yang sudah dibuat tidak bekerja
dengan maksimal dan tidak sesuai harapan. Hal itu ditunjukkan dengan adanya
kondisi-kondisi berikut:
1.
Saat pengeksekusian program, sensor hanya bekerja sementara waktu sebelum
akhirnya berhenti menampilkan nilai pitch dan roll di Serial Monitor.
2.
Akibat dari sensor yang tidak bekerja dalam menampilkan data, menyebabkan
motor DC tidak berputar memenuhi kondisi program, atau dengan kata lain,
motor DC berhenti berputar padahal tripod belum menunjukkan kedudukan
yang seimbang.
Setelah melakukan analisis dan pengecekkan ulang pada rangkaian, penyebab utama
sistem tidak bekerja maksimal adalah adanya noise.
Motor DC memang rentan dengan munculnya noise seiring dengan penggunaannya.
Untuk mengantisipasi hal itu, pada daftar komponen yang mungkin akan dipakai sudah
disediakan kapasitor milar 100 nF sebagai peredam noise yang dihasilkan oleh motor.
[image:62.595.234.376.540.647.2]Pengujian selanjutnya dilaksanakan dan menemukan bahwa sensor masih belum
bekerja dengan baik. Analisis dan pengecekkan kali ini menunjukkan pembuatan
perangkat elektronik yang kurang baik.
Gambar 3.20
Triplek Berlapis Alumunium
[image:63.595.243.391.419.616.2]Pada gambar 3.20 terlihat bahwa papan pada perangkat elektronik menggunakan
papan triplek yang dilapisi lempengan tipis alumunium dan komponen-komponennya
terpasang dibagian papan sebaliknya diperlihatkan pada gambar 3.21. Adanya lapisan
alumunium tersebut menyebabkan aliran Vcc dan Ground yang menyatu sehingga
terdapat ripple (noise) tegangan yang mengganggu sistem, khususnya sensor. Apabila
tidak segera diperbaiki akan bisa merusak komponen-komponen yang tersambung di
perangkat ini.
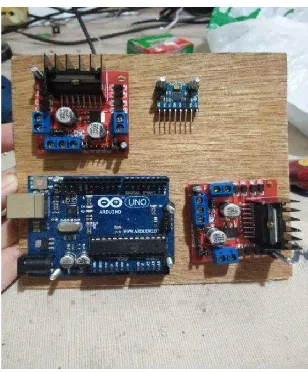
[image:64.595.244.391.323.520.2]Kemudian perangkat elektronik dirancang ulang, mengganti papan triplek berlapis
lempengan alumunium dengan papan akrilik yang berukuran kurang lebih sama, dan
dilakukan pengkabelan yang lebih rapi, seperti ditunjukkan oleh gambar 3.22.
Gambar 3.22
Rancang Ulang Perangkat Elektronik
BAB I
PENGUJIAN ALAT DAN PEMBAHASAN
4.1 Uji Coba Alat
D
a
lam bab ini akan dibahas mengenai pengujian alat yang telah dibuat. Dimulai
dengan pengujian setiap bagian-bagian dari hardware dan software yang bertujuan
untuk mengetahui apakah setiap bagiannya bekerja dengan baik. Dilanjutkan dengan
pengujian sistem secara keseluruhan yang bertujuan untuk mengetahui apakah
antarbagian sistem bekerja dengan baik