Informasi Dokumen
- Penulis:
- Rizal Pinem
- Pengajar:
- Ir. Satria Ginting MT
- Sekolah: Universitas Sumatera Utara
- Mata Pelajaran: Teknik Elektro
- Topik: Pengendalian Motor Induksi 1 Phasa Berbasis Programmable Logic Controller (PLC)
- Tipe: Tugas Akhir
- Tahun: 2011
- Kota: Medan
Ringkasan Dokumen
I. PENDAHULUAN
Bagian ini memberikan latar belakang mengenai pentingnya pengendalian motor induksi satu fasa dalam konteks automasi industri. Latar belakang ini menjelaskan bahwa energi listrik adalah kebutuhan dasar masyarakat modern dan bagaimana perkembangan teknologi mendukung automasi mesin. Selain itu, bagian ini juga merumuskan masalah yang dihadapi dalam pengendalian motor induksi dan menetapkan tujuan penulisan yang mencakup pemenuhan syarat kelulusan serta penerapan teori yang diperoleh selama perkuliahan.
1.1 Latar Belakang
Latar belakang menjelaskan bahwa kemajuan teknologi dalam bidang automasi memerlukan alat kontrol yang efisien seperti Programmable Logic Controller (PLC). Dengan menggunakan PLC, pengendalian motor induksi satu fasa dapat dilakukan dengan lebih mudah dan cepat, memberikan efisiensi dalam pengoperasian mesin.
1.2 Rumusan Masalah
Rumusan masalah mencakup dua pertanyaan utama: bagaimana merancang sistem automasi menggunakan PLC dan bagaimana menerapkan ladder diagram pada PLC. Ini menunjukkan fokus penelitian pada aspek teknis dan praktis dari pengendalian motor.
1.3 Tujuan Penulisan
Tujuan penulisan adalah untuk memenuhi syarat kelulusan, mengaplikasikan pengetahuan tentang automasi, dan meningkatkan efisiensi kerja mesin yang beroperasi secara otomatis. Ini menekankan relevansi pendidikan dalam konteks praktis.
1.4 Batasan Penulisan
Batasan penulisan ditetapkan untuk menjaga fokus penelitian, seperti tidak membahas karakteristik motor induksi secara mendalam atau aspek lain yang tidak relevan dengan pengendalian motor menggunakan PLC.
1.5 Metoda Penelitian
Metoda penelitian meliputi studi literatur, diskusi dengan dosen pembimbing, tanya jawab dengan rekan-rekan, dan pengaplikasian langsung di laboratorium. Ini menunjukkan pendekatan sistematis dalam penelitian.
II. PLC DAN MOTOR INDUKSI SATU FASA
Bagian ini membahas konsep dasar PLC dan motor induksi satu fasa, termasuk komponen penyusun, prinsip kerja, serta kelebihan dan kekurangan penggunaan PLC dibandingkan dengan sistem kontrol konvensional. Hal ini penting untuk memahami bagaimana kedua elemen ini berfungsi dalam sistem automasi.
2.1 Program Logic Controller
PLC adalah perangkat kontrol berbasis mikroprosesor yang menggunakan memori untuk menyimpan instruksi dan mengimplementasikan fungsi logika. Keunggulan PLC termasuk fleksibilitas, efisiensi wiring, dan kemampuan diagnostik, yang membuatnya lebih unggul dibandingkan sistem kontrol tradisional.
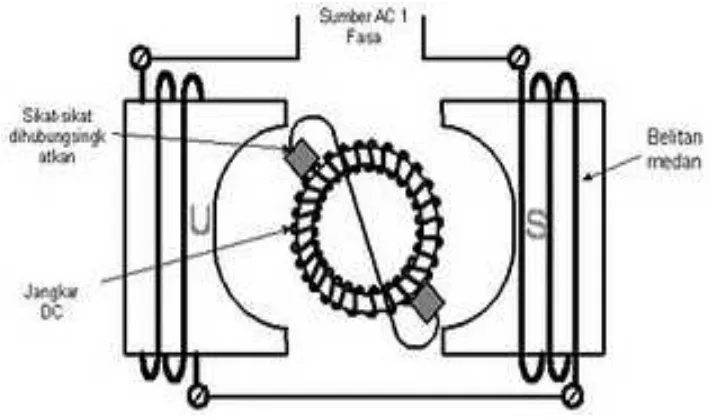
2.2 Motor Induksi Satu Fasa
Motor induksi satu fasa banyak digunakan dalam peralatan rumah tangga dan industri kecil. Penjelasan tentang konstruksi dan prinsip kerja motor ini penting untuk memahami cara pengendalian yang akan diterapkan menggunakan PLC.
III. DASAR PEMOGRAMAN PLC
Bagian ini menjelaskan dasar-dasar pemrograman PLC, termasuk berbagai bahasa pemrograman yang dapat digunakan serta teknik pemrograman ladder diagram. Pemahaman ini sangat penting bagi mahasiswa untuk dapat merancang dan menerapkan program yang efektif dalam sistem automasi.
3.1 Umum
Pemrograman PLC telah berkembang pesat sejak diperkenalkan. Pemrograman modern memungkinkan pengguna non-programmer untuk membuat dan mengubah program dengan mudah, meningkatkan aksesibilitas teknologi ini.
3.2 Fungsi-Fungsi Logika
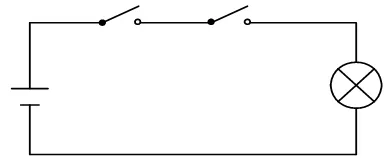
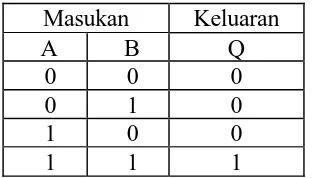
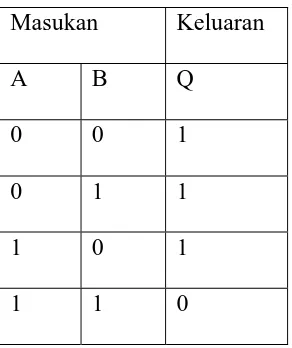
Fungsi logika dasar seperti AND, OR, dan NOT merupakan komponen penting dalam pemrograman PLC. Memahami fungsi-fungsi ini membantu mahasiswa dalam merancang logika kontrol yang kompleks.
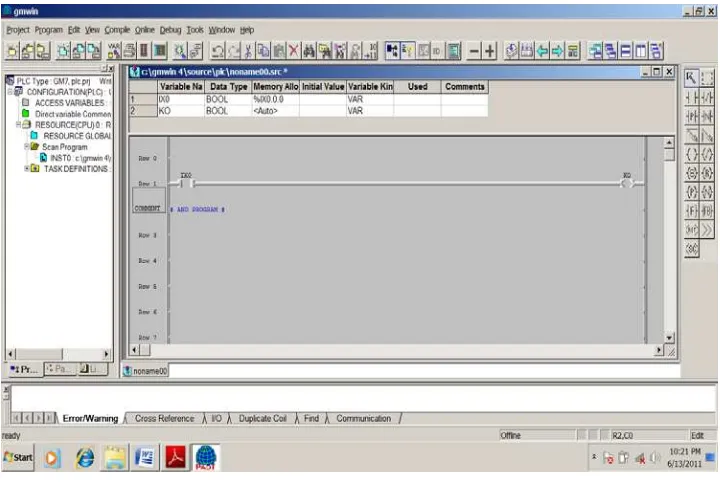
3.3 Diagram Tangga
Diagram ladder adalah metode visual yang digunakan untuk memprogram PLC, memungkinkan pengguna untuk merancang logika kontrol dengan cara yang intuitif. Ini sangat relevan untuk pendidikan teknik elektro.
IV. PENGENDALIAN MOTOR INDUKSI SATU PHASA BERBASIS PLC
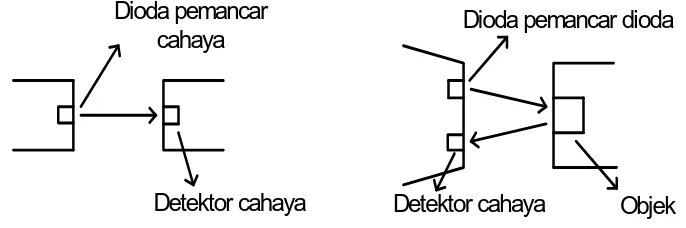
Bagian ini menguraikan aplikasi praktis dari PLC dalam pengendalian motor induksi satu fasa, termasuk peralatan input/output, prinsip kerja, dan diagram ladder yang digunakan. Ini menunjukkan bagaimana teori yang dipelajari dapat diterapkan dalam praktik.
4.1 Automatisasi
Automatisasi menggunakan PLC memungkinkan pengendalian motor secara efisien dan efektif. Penggunaan PLC dalam automasi industri memberikan keuntungan dalam hal pengurangan biaya dan peningkatan produktivitas.
4.2 Pengendalian Motor Induksi Satu Fasa Berbasis PLC
Pengendalian motor induksi satu fasa menggunakan PLC melibatkan pengaturan on-off berdasarkan kondisi tertentu. Ini menciptakan sistem yang responsif terhadap perubahan kondisi operasional.
V. KESIMPULAN DAN SARAN
Kesimpulan merangkum temuan utama dari penelitian ini dan memberikan saran untuk penelitian lebih lanjut. Ini menunjukkan pentingnya pengembangan lebih lanjut dalam bidang automasi menggunakan PLC.
5.1 Kesimpulan
Kesimpulan menegaskan bahwa penggunaan PLC dalam pengendalian motor induksi satu fasa dapat meningkatkan efisiensi dan efektivitas operasional, serta memberikan kemudahan dalam pengendalian dan pemrograman.
5.2 Saran
Saran mencakup perlunya penelitian lebih lanjut dalam pengembangan sistem automasi yang lebih canggih, serta pelatihan tambahan bagi mahasiswa untuk meningkatkan pemahaman dan keterampilan mereka dalam teknologi PLC.
Referensi Dokumen
- Program Logic Controller (PLC) Edisi Ketiga ( Bolton, William )
- Programming Control Logix ( Jon Stenerson )
- Simulasi Pengaturan Star-Stop dan Pembebanan Tiga Generator Dengan Control Menggunakan PLC ( Irpan, Khairul )
- Rangkaian Digital Logika Digital Edisi Kedua ( Tarigan, Pernantin )
- Fundamental of Digital Logic and Microcomputer Design Edisi Kelima ( Rafiquzzaman, M )