MOTOR SINKRON
MOTOR AC - SINKRON
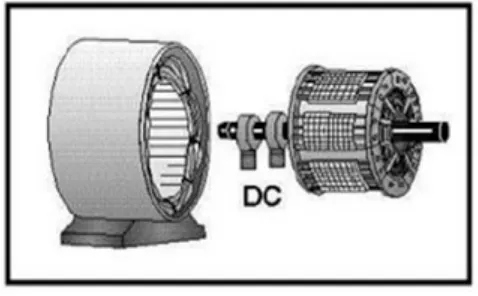
Motor sinkron adalah motor AC yang bekerja pada kecepatan tetap pada sistim frekwensi tertentu. Motor ini memerlukan arus searah (DC) untuk pembangkitan daya dan memiliki torque awal yang rendah, dan oleh karena itu motor sinkron cocok untuk penggunaan awal dengan beban rendah, seperti kompresor udara, perubahan frekwensi dan generator motor. Motor sinkron mampu untuk memperbaiki faktor daya sistim, sehingga sering digunakan pada sistim yang menggunakan banyak listrik.
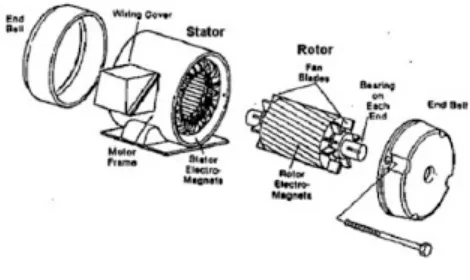
Komponen utama motor sinkron adalah:
Stator menghasilkan medan magnet berputar yang sebanding dengan frekwensi yang dipasok.
Gambar Motor Sinkron.
A. Prinsip Kerja Motor AC sinkron
torque yang dihasilkan, dan motor akan berhenti. Motor sinkron bukanlah self-starting motor karena torque hanya akan muncul ketika motor bekerja pada kecepatan sinkron; karenanya motor memerlukan peralatan untuk membawanya kepada kecepatan sinkron.
Motor sinkron menggunakan rotor belitan. Jenis ini mempunyai kumparan yang ditempatkan pada slot rotor. Slip ring dan sikat digunakan untuk mensuplai arus kepada rotor.
Prinsip Motor Sinkron secara umum : - Belitan medan terdapat pada rotor - Belitan jangkar pada stator
- Pada motor sinkron, suplai listrik bolak-balik (AC ) membangkitkan fluksi medan putar stator (Bs) dan suplai listrik searah (DC) membangkitkan medan rotor (Bs). Rotor berputar karena terjadi interaksi tarik-menarik antara medan putar stator dan medan rotor. Namun dikarenakan tidak adanya torka-start pada rotor, maka motor sinkron membutuhkan prime-mover yang memutar rotor hingga kecepatan sinkron agar terjadi coupling antara medan putar stator (Bs) dan medan rotor (Br).
Penyalaan Motor Sinkron
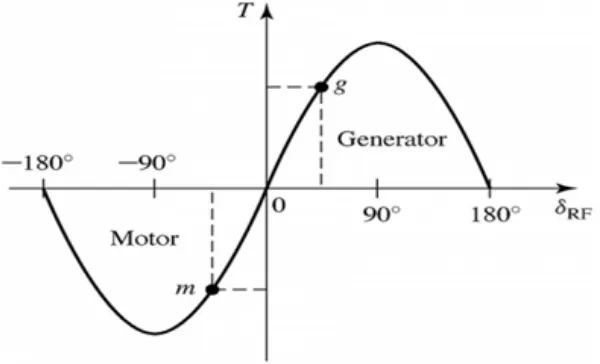
Gambar sudut torque (torque angle)
Jika beban mekanis pada motor dinaikkan ke titik dimana rotor ditarik keluar dari sinkronisasi , maka motor akan berhenti. Harga maksimum torque sehingga motor tetap bekerja tanpa kehilangan sinkronisasi disebut pull-out torque.
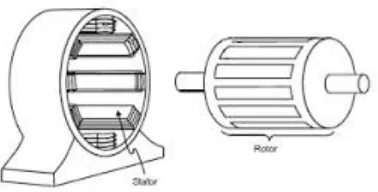
A. Kontruksi Motor AC Sinkron
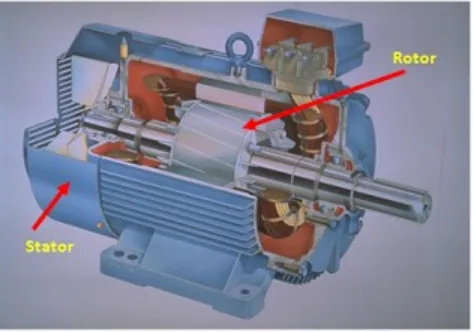
Gambar Kontruksi Motor Sinkron
Seperti yang telah diulas diatas, bahwa komponen penting dari motor sinkron adalah stator dan rotor, yang mana komponen ini adalah komponen umum atau dasar pada sebuah motor.
dapat mengakibatkan adanya rugi-rugi daya sehingga motor ini memiliki efisiensi tinggi. Sedangkan kelemahan dari motor sinkron adalah tidak mempunyai torka mula, sehingga untuk starting diperlukan cara-cara tertentu. Bila metode starting telah dapat dikembangkan kemudian hari, maka motor ini akan lebih unggul dibandingkan motor listrik yang lain.
A. Rumusan matematis Motor AC sinkron
Motor ini berputar pada kecepatan sinkron, yang diberikan oleh persamaan berikut:
Ns = 120 f / P
di mana :
Ns = kecepatan serempak, dalam rpm
F = frekuensi daya AC
p = jumlah kutup per lilitan phase
Slip dari motor AC dihitung dengan :
Di mana :
Nr = kecepatan putar, dalam rpm
S = slip normal, 0 sampai 1.
Sebagai contoh, sebuah motor dengan empat kutub beroperasi pada 60 Hz bisa memiliki plat nama 1725 RPM pada beban penuh, sedangkan bila dihitung kecepatannya 1800 RPM.
D. Penggunaan Motor AC sinkron
Motor ini memerlukan arus searah (DC) untuk pembangkitan daya dan memiliki torque awal yang rendah, dan oleh karena itu motor sinkron cocok untuk penggunaan awal dengan beban rendah, seperti kompresor udara, perubahan frekwensi dan generator motor.
E. Proteksi Motor AC sinkron
motor. Namun untuk mencegah hal tersebut dipasang proteksi khusus agar motor tidak menjadi menjadi generator atau sebaliknya.
Ada banyak metode kendali motor AC (motor induksi, motor sinkron) dengan kelebihan dan kekurangannya. Namun secara umum metode ini dapat dikelompokkan sebagai berikut:
1. Kendali Skalar (v/f Konstan)
2. Kendali Berorientasi Medan (Field Oriented Control, FOC)
3. Kendali Torsi Langsung (Direct Torque Control, DTC)
Overload Motor Protection
Overload Motor Protection, yang dimaksud motor ini adalah electric motor yang oleh orang awam disebut dinamo. Dan disini dikhususkan yang terjadi pada motor AC 3 phase. Fungsi dari motor ini adalah sebagai penggerak atau untuk mengkonversi energi listrik menjadi mekanik/ gerak seperti lift, conveyor, blower, crusher dll. Dalam dunia industri saat ini peran yang dilakukan motor ini sangat vital. Untuk itu proteksi sangat diperlukan untuk menjaga kelancaran suatu proses. Sistem proteksi motor ini sudah lama dikenal dan berkembang seiring kemajuan teknologi. Mulai dari penggunaan eutic relay, thermal, sampai elektronik. Secara umum sistem kerja alat tersebut dapat dibagi menjadi dua yaitu dengan thermal dan elektronik.THERMAL OVERLOAD.
ELECTRONIC OVERLOAD
Overload electronic ini mempunyai 2 karakteristik trip, INVERSE dan DEFINITE. Inverse, ia akan bekerja seperti thermal overload. Perbedaannya adalah kemampuannya untuk menggeser kurva trip. Jadi overload ini selain mempunyai setting arus juga kecepatan trip atau class adjustment. Selain itu dengan menggunakan rangkaian elektronik ia akan tidak mudah dipengaruhi suhu sekitar serta akurasi lebih terjaga. Definite, bekerja dengan pembatasan yang ketat. Dengan karakteristik ini, berapapun besar kelebihan beban ia akan trip setelah mencapai waktu yang ditentukan. Misal seting overload pada 10 amp dengan waktu trip 4 detik. Jika terjadi kelebihan beban lebih dari 10 amp selama lebih dari 4 detik dia akan trip. Kecepatan trip ini tidak tergantung besar arus overload (baik kecil atau besar sama saja).
tergantung dengan prioritas kita. Tetapi, overload protection tetaplah mutlak diperlukan dalam sebuah suatu sistem motor starter.
F. Pengukuran Motor AC sinkron
Pembangkitan Torka
Interaksi antara medan putar stator (Bs) dan medan rotor (Br) yang membangkitkan torka seperti terlihat dalam persamaan berikut.T = Bsx Bs(sin δ)
δ disebut sudut beban karena besarnya tergantung pembebanan. Pada saat beban nol nilai δ=0. Jika dibebani, medan rotor tertinggal dari rotor sebesar δ, kemudian berputar sama lagi. Beban maksimum tercapai pada δ=90o. Jika beban dinaikkan terus melebihi batas itu, maka motor akan kehilangan sinkronisasi dan akhirnya akan berhenti.Pembangkitan medan putar
· Pada Motor sinkron 3 fasa, mengalir arus seimbang pada tiap fasa dengan beda sudut fasa
120o
ia = Im sin ωt
ic = Im sin (ωt-240o)
Tiap arus fasa membangkitkan ggm F yang merupakan fungsi sudut ruang ө seperti ia à Fa.cos θ. Dengan Fa=Fm. sin ωt
Maka ggm F tiap fasa yang dibangkitkan
Fa = Fm sin ωt.cos θ
Fb = Fm sin (ωt-120o).cos (θ-120o)
Fc = Fm sin (ωt-240o) .cos (θ-240o)
Resultan ketiga ggm, Fr=Fa+ Fb +Fc
Dan jika kemudian disederhanakan dengan persamaan trigonometri akan diperoleh:
F(θ,t) = 3/2 Fm.cos (θ-ωt)
G. Karakteristik Motor AC sinkron
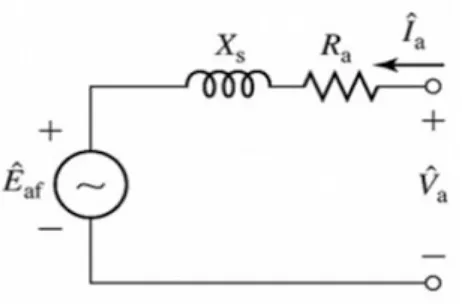
Gambar Model Motor Sinkron (Model dan Diagram Fasor)
Pengaruh Penguatan Medan
Ø Untuk membangkitkan fuksi dibutuhkan daya reaktif yang bersifat induktif.
Ø Pada motor sinkron, ggm dibangkitkan arus medan (DC) pada belitan rotor. Jika arus medan ini cukup, maka motor tidak membutuhkan suplai energi reaktif dari sisi stator yang bersumber dari jaringan listrik. Sehingga motor bekerja dengan faktor daya = 1.
Ø Jika penguatan arus medan kurang, maka motor sinkron akan menarik daya reaktif yang bersifat induktif dari sisi stator. Sehingga motor bekerja dengan factor daya(pf) terbelakang (lagging). Artinya motor menjadi pembangkit daya reaktif yang bersifat induktif.
Kondensor Sinkron
Seperti diuraikan di atas, jika motor sinkron kelebihan penguatan arus medan, maka motor sinkron akan menarik daya reaktif yang bersifat kapasitif dari sisi stator. Sehingga motor bekerja dengan factor daya (pf) mendahului (leading). Artinya motor menjadi pembangkit daya reaktif yang bersifat kapasitif. Sehingga motor sinkron dapat digunakan untuk memperbaiki factor daya (pf). Dalam hal ini motor sinkron disebut Kondensor sinkron.
Karakteristik Torka dan Sudut daya
Gambar diatas memperlihatkan bahwa Torka adalah fungsi sin δ, dengan δ adalah sudut daya. Pada motor sinkron nilai δ negatif dan nilainya positif pada generator sinkron. Torka maksimum dicapai pada δ= +/- 90o. Jika melebihi batas itu, maka motor atau generator akan kehilangan stabilitas dan sinkronisasi dan pada akhirnya akan berhenti.
MOTOR INDUKSI
didapat, dan dapat langsung disambungkan ke sumber daya AC.
Komponen Motor induksi memiliki dua komponen listrik utama (Gambar 8): • Rotor. Motor induksi menggunakan dua jenis rotor:
- Rotor kandang tupai terdiri dari batang penghantar tebal yang dilekatkan dalam petak-petak slots paralel. Batang-batang tersebut diberi hubungan pendek pada kedua ujungnya dengan alat cincin hubungan pendek.
- Lingkaran rotor yang memiliki gulungan tiga fase, lapisan ganda dan terdistribusi. Dibuat melingkar sebanyak kutub stator. Tiga fase digulungi kawat pada bagian dalamnya dan ujung yang lainnya dihubungkan ke cincin kecil yang dipasang pada batang as dengan sikat yang menempel padanya.
• Stator. Stator dibuat dari sejumlah stampings dengan slots untuk membawa gulungan tiga fase. Gulungan ini dilingkarkan untuk sejumlah kutub yang tertentu. Gulungan diberi spasi geometri sebesar 120 derajat .
Klasifikasi motor induksi
Motor induksi dapat diklasifikasikan menjadi dua kelompok utama (Parekh, 2003):
• Motor induksi satu fase. Motor ini hanya memiliki satu gulungan stator, beroperasi dengan pasokan daya satu fase, memiliki sebuah rotor kandang tupai, dan memerlukan sebuah alat untuk menghidupkan motornya. Sejauh ini motor ini merupakan jenis motor yang paling umum digunakan dalam peralatan rumah tangga, seperti kipas angin, mesin cuci dan pengering pakaian, dan untuk penggunaan hingga 3 sampai 4 Hp.
Gambar 8. Motor Induksi.
Kecepatan motor induksi
Motor induksi bekerja sebagai berikut, Listrik dipasok ke stator yang akan menghasilkan
medan magnet. Medan magnet ini bergerak dengan kecepatan sinkron disekitar rotor. Arus rotor menghasilkan medan magnet kedua, yang berusaha untuk melawan medan magnet stator, yang menyebabkan rotor berputar. Walaupun begitu, didalam prakteknya motor tidak pernah bekerja pada kecepatan sinkron namun pada “kecepatan dasar” yang lebih rendah. Terjadinya perbedaan antara dua kecepatan tersebut disebabkan adanya “slip/geseran” yang meningkat dengan meningkatnya beban. Slip hanya terjadi pada motor induksi. Untuk
menghindari slip dapat dipasang sebuah cincin geser/ slip ring, dan motor tersebut dinamakan “motor cincin geser/slip ring motor”.
Persamaan berikut dapat digunakan untuk menghitung persentase slip/geseran(Parekh, 2003):
% Slip = (Ns – Nb)/Ns x 100
Dimana:
Ns = kecepatan sinkron dalam RPM Nb = kecepatan dasar dalam RPM
Gambar 9. Grafik Torsi vs Kecepatan Motor Induksi.
Gambar 9 menunjukan grafik torsi vs kecepatan motor induksi AC tiga fase dengan arus yang sudah ditetapkan. Bila motor (Parekh, 2003):
• Mulai menyala ternyata terdapat arus nyala awal yang tinggi dan torsi yang rendah (“pull-up torque”).
• Mencapai 80% kecepatan penuh, torsi berada pada tingkat tertinggi (“pull-out torque”) dan arus mulai turun.
• Pada kecepatan penuh, atau kecepatan sinkron, arus torsi dan stator turun ke nol.
Motor Induksi 1 Fasa
A. Motor Induksi 1 fasa
Konstruksi motor induksi satu fasa terdiri atas dua komponen yaitu stator dan rotor. Stator adalah bagian dari motor yang tidak bergerak dan rotor adalah bagian yang bergerak yang bertumpu pada bantalan poros terhadap stator. Motor induksi terdiri atas kumparan-kumparan stator dan rotor yang berfungsi membangkitkan gaya gerak listrik akibat dari adanya arus listrik bolak-balik satu fasa yang melewati kumparan-kumparan tersebut sehingga terjadi suatu interaksi induksi medan magnet antara stator dan rotor. Bentuk dan konstruksi motor tersebut digambarkan pada gambar 1.
B. Rangkaian Ekivalen Motor Induksi 1 Fasa
Motor induksi satu fasa terdiri kumparan stator dan kumparan rotor. Kumparan stator dan rotor masing-masing terdiri dari parameter resistansi “R’, reaktansi “jX”dan lilitan penguat “N”. rangkaian ekivalen dari motor induski satu fasa dapat dilihat pada gambar di bawah ini.
Gb 2. Rangkaian Ekivalen Motor Induksi Sederhana
Nilai arus suber bolak-balik satu fasa dapat dirumuskan sebagai berikut : I1 = IØ + I2’
Besarnya arus pemaknitan IØ yang timbul akibat adanya induksi yang terjadi antara medan stator dan rotor adalah :
IØ = Ir + Im
Ggl yang dihasilkan akibat interaksi induksi medan magnet antara stator dan rotor yang masing-masing sebesar E1 dan E2 adalah :
Impedansi pada kumparan motor stator dan rotor masing-masing adalah :
jXs = jws Ls
jXr = jwr Lr
C. Prinsip Kerja Motor Induksi 1 Fasa
Medan magnet berputar bergerak memotong lilitan rotor sehingga menginduksikan tegangan listrik pada kumparan-kumparan tersebut. Biasannya lilitan rotor berada dalam hubung singkat. Akibatnya lilitan rotor akan mengalir arus listrik yang besarnya tergantung pada besarnya tegangan induksi dan impedansi rotor. Arus listrik yang mengalir pada rotor akan mengakibatkan medan magnet rotor dengan kecapatan sama dengan kecepatan medan putar stator (ns).
Interaksi medan stator dan rotor akan membangkitkan torsi yang menggerakan rotor berputar searah dengan arah medan putar stator. Interaksi medan stator dan rotor juga menyebabkan terjasinya gaya gerak listrik induksi yang disebabkan oleh kumparan-kumparan stator dan rotor. Rumusan matematis gaya gerak listrik yang terjadi pada motor induksi satu fasa dengan rumusan sebagai berikut :
Dimana nilai Φ(t) untuk fluksi maksimum akibat dari penyebaran kerapatan fluks yang melewati lilitan dengan rumus :
D. Hubungan Torsi dan Slip pada Motor
Berubah-ubahnya kecepatan motor induksi (ns) akan mengakinbatkan harga slip dari 100% pada start hingga 0% pada saat motor diam (nr – ns). torsi yang dihasilkan selama motor iinduksi satu fasa berputar tergantung pada perubahan slip dan perubahan dalam Newton.meter. Perubahan pembebanan dapat terjadi dengan naiknya nilai tegangan dan arus pada rotor. Hubungan torsi (Td) terhadap parameter impedansi stator, impedansi rotor, arus rotor, tegangan sumber dan kecepatan sudut
secara umum dapat dirumuskan sebagai berikut :
Motor Universal
mesin jahit, untuk mengatur kecepatan dihubungkan dengan tahanan geser dalam bentuk pedal yang ditekan dan dilepaskan. Seperti halnya motor-motor lain pada motor Universal memiliki dua bagian inti yaitu:
a.STATOR
Stator adalah bagian yang diam tempat dimana kumparan diletakkan pada umumnya pada motor univesrsal memiliki 2 kutub kumparan.
b.ROTOR
Rotor adalah bagian yang berputar letaknya ada diantara stator.Pada motor universal bagian rotor sedikit berbeda dengan motor lain dimana pada rotor motor universal terdiri dari 2 bagian yaitu jangkar dan komutator,Jangkar adalah tempat dibelitkannya kumparan yang ujung-ujungnya diletakkan pada komutator sesuai langkah belitan kumparan dan pada komutator ini diletakkan sikat karbon yang berfungsi mengalirkan arus dari sumber luar kedalam jangkar motor. perhatikan gambar dibawah ini!
KONSTRUKSI
Motor jenis ini didesain dengan stator berupa lempengan besi yang dilaminasi, medan magnetis statis dan armatur. Belitan armatur dan belitan medan dirangkai secara seri melalui dua sikat arang, sehingga dihasilkan arah arus medan dan arus armatur yang sama meskipun motor disuplai dengan arus AC. Torka yang dihasilkan dari motor jenis ini berupa pulsa yang dihasilkan setiap setengah siklus ketika arus berubah arah melewati komutator.Kalau dilihat dari fisiknya hampir mirip dengan motor-motor DC.
Prinsip kerja motor universal mudah dimengerti dibandingkan dengan prinsip kerja motor
f = fliks magnet (kg/A.s2 atau tesla)
Bila motor dihubungkan dengan sumber tegangan AC, pada saat ½ periode positif motor berputar berlawanan dengan arah putaran jarum jam. Pada ½ periode negatif , dan menurut “hukum tangan kiri” dinyatakan: apabila tangan kiri terbuka diletakkan diantara kutub U dan S, maka garis-garis gaya yang keluar dari kutub utara menembus telapak tangan kiri dan arus didalam kawat mengalir searah dengan arah keempat jari, sehingga kawat tersebut akan mendapat gaya yang arahnya sesuai dengan ibu jari.
KELEBIHAN/KEUNTUNGAN MOTOR UNIVERSAL
Dibandingkan dengan jenis motor ac fase tunggal lainnya, motor universal memiliki beberapa keuntungan:
Untuk berat tertentu, universal motor menghasilkan tenaga yang lebih besar dari jenis lainnya.Motor universal menghasilkan Starting torsi yang besar tanpa arus yang
berlebihan.Ketika beban torsi meningkat, motor universal melambat. Oleh karena itu, daya dihasilkan relatif konstan, dan besarnya arus masih dalam batas wajar. Dengan demikian, universal motor ini lebih cocok untuk beban yang menuntut berbagai torsi dengan range yang lebar, seperti bor dan mixer makanan.Universal motor dapat dirancang untuk beroperasi pada kecepatan yang sangat tinggi, sedangkan jenis motor ac terbatas pada 3600 rpm, dengan asumsi 60-Hz source.
MOTOR SHADED POLE
medan magnet dari fluks magnetik pada kutub bayangan/shaded pole sehingga cukup untuk membuat sebuah medan yang berputar untuk memutarkan rotor.Arahnya putaran pada motor shaded pole adalah dari kumparan inti ke kumparan bantu/bayangannya.Namun pada motor shaded pole biasanya bertorsi kecil hal ini disebabkan berpedaan fhase pada sudut kumparan inti dan bantu/bayanganya sangatlah kecil.
a.Konstruksi Motor Shaded Pole
b.Prinsip Kerja Motor Shaded Pole
magnet dan perbedaan sudut fhase pada kumparan bayangan dan kumparan intinya sehingga medan putar akan timbul dari arah kumparan inti ke kumparan bayangan/bantunya.Karena torsi yang dihasilkan kecil sehingga motor shaded pole tidak membutuhkan capasitor,sakelar centrifugal atau alat starting lainnya.Untuk lebih jelasnya silahkan lihat gambar berikut.