TUGAS AKHIR
Oleh :
MILADDINA TRI BUANA
2013 301 0042
PROGRAM STUDI
D3 TEKNIK ELEKTROMEDIK
viii
1.2 Perumusan Masalah ... 2
1.3 Pembatasan Masalah ... 2
1.4 Tujuan Penelitian ... 3
1.4.1 Tujuan umum ... 3
1.4.2 Tujuan khusus... 3
1.5 Manfaat Penelitian ... 3
BAB II TINJAUAN PUSTAKA ... 4
2.1 Dasar Breastpump ... 4
2.2 Pompa Rotari ... 5
BAB III METODOLOGI PENELITIAN... 15
3.1 Perancangan Perangkat Keras ... 15
3.1.1 Blok Diagram ... 15
3.1.2 Diagram Mekanis Sistem ... 16
ix
3.2.2 Program ... 21
3.3 Perancangan Pengujian ... 28
3.3.1 Jenis Pengujian ... 28
3.3.2 Pengolahan Data ... 28
3.3.3 Sistematika Pengukuran ... 29
BAB IV HASIL DAN PEMBAHASAN ... 32
4.1 Pengujian Tegangan ... 32
4.1.1 Pengukuran Tegangan Pada Tekanan Low ... 32
4.1.2 Pengukuran Tegangan Pada Tekanan Medium ... 35
4.1.3 Pengukuran Tegangan Pada Tekanan High ... 38
4.2 Pengujian Timer ... 41
4.2.1 Pengukuran Timer Pada Saat Waktu 5 menit ... 41
4.2.2 Pengukuran Timer Pada Saat Waktu 10 menit ... 44
4.2.3 Pengukuran Timer Pada Saat Waktu 15 menit ... 47
4.3 Pembahasan ... 50
BAB V KESIMPULAN DAN SARAN... 52
5.1 Kesimpulan... 52
5.2 Saran ... 53
DAFTAR PUSTAKA ... 54
xii
kesibukan dalam berkarir banyak ibu yang tidak dapat memberikan ASI eksklusif
terhadap bayinya. “Pengembangan Breastpump Elektrik Berbasis Mikrokontroler
ATMega8535 Dilengkapi Dengan Pengatur Waktu dan Tekanan” merupakan
salah satu alat yang memiliki keunggulan yaitu dengan pengaturan timer dan
tekanan. Sehingga lebih efektif.
Pada tugas akhir ini dirancang breastpump elektrik yang dilengkapi
dengan 3 pilihan tekanan yaitu low, medium dan high. Hal ini bertujuan untuk
kenyamanan dan hasil pemvakuman yang sesuai dengan pengguna. Selain itu,
breaspump ini memiliki pilihan waktu yaitu 1 sampai 15 menit yang dipilih
melalui tombol up dan down. Pengaturan waktu berfungsi untuk proses
pemvakuman agar hasil dari air susu ibu dapat keluar dengan maksimal.
Hasil dari pengukuran tegangan pada saat tekanan low didapatkan error
sebesar 0,0003%, pada tekanan medium terdapat error sebesar 0,0002%, pada
saat tekanan high terdapat error 0%. Sedangkan hasil perhitungan waktu
pemvakuman dengan 5, 10, 15 menit terdapat nilai error 0%. Berdasarkan hasil
pengukuran dan kesalahan nilai error alat ini dapat dimanfaatkan sebagai
alternatif yang efisien untuk Ibu menyusui, dengan menggunakan alat ini lebih
efisien dalam hal waktu, tenaga serta dapat diiringi dengan kegiatan lain.
xiii
mothers can not provide exlusive breastfeeding for their baby. “Electric
breastpump development based on microcontroller ATMega8535 with time and
pressure control” is a tool that has the advantage being more effective with the
timer and pressure that can be set according to users desire.
In this final project electric breastpump that is designed equipped with 3
choices pressure namely low, medium and high. It aims to make the users comfort
and results of breaspump suction is suitable for users. This tool has the choice of
the time duration is 1 to 15 minutes that are selected via buttons up and down.
The timing is intended to make the result of the breastpump suction more
maximal.
Based on the conducted experiment, the results of the measurement of the
voltage at low pressure obtained error of 0,0003%, at a medium pressure there is
an error of 0,0002%, and at high pressure there is an error of 0%. While the
result of the measurement of time duration with 5, 10, 15 minutes obtained 0% of
error. Based on the measurement result and the resulted error value, this tool can
be utilized as an efficient alternative tool for breast feeding mothers.
1 1.1 Latar Belakang
Air susu ibu (ASI) adalah susu yang diproduksi oleh manusia untuk
konsumsi bayi dan merupakan sumber gizi utama bayi yang belum dapat
mencerna makanan padat. Karena berbagai alasan, seperti kesibukan dalam
berkarir banyak ibu yang tidak dapat memberikan ASI eksklusif terhadap
bayinya. Oleh karena itu diciptakan alat yang bernama breastpump yang
berfungsi untuk membantu Ibu menyusui, mengeluarkan ASI dari payudara
agar dapat disimpan untuk persediaan. Dengan cara menggerakkan tangan
dan menarik piston sehingga ASI dapat terhisap keluar.
Pada alat ini terlihat jelas kekurangannya yaitu untuk menarik
corong pompa atau melakukan pemvakuman masih menggunakan tangan,
sehingga tidak efisien. Dengan melakukan proses penarikan manual yang
seperti ini membutuhkan waktu yang lama dan tidak dapat diiringi dengan
kegiatan lain. Berdasarkan permasalahan tersebut perlu dibuat inovasi
breastpump elektrik dengan menggunakan motor vakum.
Dalam perkembangan teknologi yang ada mulai diciptakannya
breastpump dengan menggunakan motor vakum, sehingga dalam proses
pengambilan ASI lebih efisien dalam hal waktu, tenaga serta dapat diiringi
dengan kegiatan lain. Menurut Oreon Wic Program menetapkan bahwa total
Walaupun breastpump tersebut sudah menggunakan motor vakum, namun
belum dilengkapi dengan pengaturan waktu dan beberapa diantaranya belum
dilengkapi dengan pengaturan tekanan.
Tekanan pada breastpump merupakan hal yang penting karena
berpengaruh pada air susu yang akan dihisap. Ketika tekanan pada
breastpump kurang dari 50mmHg, air susu akan sulit keluar, dan ketika
tekanan di atas 200mmHg, akan menyebab rasa sakit pada payudara ibu.
Oleh karena itu, diperlukan pengaturan tekanan pada breastpump. Demikian
juga dengan pengaturan durasi waktu penyedotan, jika waktu terlalu singkat
akan mempengaruhi air susu tidak keluar secara maksimal dan jika waktu
yang dipakai melebihi 15 menit dapat mengakibatkan payudara pengguna
(ibu menyusui) merasakan kesakitan. Berdasarkan identifikasi masalah
diatas, maka ditugas akhir ini akan dibuat alat pengembangan breastpump
elektrik berbasis mikrokontroler ATMega8535 dengan dilengkapi pengatur
waktu dan tekanan.
1.2 Rumusan Masalah
Belum adanya breastpump elektrik yang dilengkapi dengan pengatur
waktu dan tekanan, sehingga dibuat pengembangan breastpump elektrik
yang terdapat pengaturan waktu dan tekanan.
1.3 Batasan Masalah
1. Pembuatan alat menggunakan ATMega8535.
2. Menggunakan LCD sebagai tampilan (display).
4. Terdapat pengaturan timer yaitu 1-15 menit.
1.4 Tujuan
1.4.1 Tujuan Umum
Dibuatnya alat pengembangan breastpump elektrik berbasis
mikrokontroler ATMega8535 dilengkapi dengan pengatur waktu dan
tekanan.
1.4.2 Tujuan Khusus
1. Membuat rangkaian mikrokontroler.
2. Membuat program timer.
3. Membuat rangkaian driver motor.
4. Membuat rangkaian monitoring tekanan.
5. Membuat tampilan pada LCD.
6. Menguji rangkaian keseluruhan.
1.5 Manfaat
1.5.1 Manfaat Teoritis
1. Menambah wawasan dan pengetahuan tentang alat-alat kesehatan
khususnya pada alat breast pump.
2. Sebagai referensi untuk penelitian selanjutnya.
1.5.2 Manfaat Praktis
1. Memudahkan pengguna khusus Ibu menyusui untuk
4
2.1 Dasar Breastpump
ASI (Air Susu Ibu) adalah makanan bayi yang paling penting
terutama pada bulan-bulan pertama kehidupan. ASI merupakan sumber gizi
yang sangat ideal dengan komposisi yang seimbang dan sesuai dengan
kebutuhan pertumbuhan bayi, karena ASI adalah makanan bayi yang paling
sempurna baik secara kualitas maupun kuantitas. ASI sebagai makanan
tunggal akan cukup memenuhi kebutuhan tumbuh kembang bayi normal
sampai usia 4-6 bulan. Namun, saat ini banyak ibu-ibu menyusui yang tidak
mampu memberikan ASI kepada bayinya karena kesibukannya menjadi
wanita karir. Hal ini sangat membahayakan si bayi karena kekurangan ASI
dapat berakibat diantaranya kekebalan tubuh yang kurang baik, dan kurang
optimalnya tingkat kecerdasan bayi(Utami Roesli, 2004).
Breastpump diciptakan untuk membantu ibu menyusui
mengeluarkan ASI dari payudara agar dapat disimpan untuk persediaan.
Biasanya breastpump/pompa ASI sangat bermanfaat bagi ibu-ibu pekerja
yang tidak mempunyai cukup waktu bersama bayi karena tuntutan dari
aktivitas lain dan tetap memberikan ASI eksklusif yang dibutuhkan untuk
pertumbuhan bayi.
Sebelumnya sudah ada breastpump manual, namun breastpump
masih menggunakan tangan, sehingga membutuhkan waktu yang lama dan
menguras tenaga, tetapi breaspump manual mempunyai kelebihan yaitu
tidak membutuhkan listrik. Selain breastpump manual, juga sudah ada
breastpump elektrik namun belum dilengkapi pengatur waktu dan tekanan,
namun kelebihan dari breastpump elektrik ini sudah memakai motor untuk
proses pemvakuman.
2.2 Pompa Rotari
Prinsip kerja pompa rotary yaitu menggerakkan fluida dengan
menggunakan prinsip rotasi. Vakum terbentuk oleh rotasi dari pompa dan
selanjutnya menghisap fluida masuk. Cairan masuk sisi isap antara rotor dan
idler. Cairan bergerak diantara celah antar gigi, bagian berbentuk bulan sabit
berfungsi sebagai pemisah antara sisi isap dan sisi buang. Setelah rumah
pompa hampir dipenuhi cairan, roda gigi membentuk susunan sedemikian
sehingga daerah hisap dan daerah buang terpisah. Setelah daerah isap dan
buang sepenuhnya terpisah cairan mulai keluar pada sisi buang. Keuntungan
dari tipe ini adalah efisiensi yang tinggi karena secara natural ia
mengeluarkan udara dari pipa alirannya, dan mengurangi kebutuhan
pengguna untuk mengeluarkan udara tersebut secara manual.
Kekurangannya karena sifat alaminya maka clearence antara sudu putar dan
sudu pengikutnya harus sekecil mungkin, dan mengharuskan pompa
berputar pada kecepatan yang rendah dan stabil. Apabila pompa bekerja
menyebabkan erosi pada sudut sudut pompa. Pompa rotari dapat dilihat di
Gambar 2.1(Usmust, 2011).
Gambar 2.1 Pompa Rotari.
2.3 Transistor
Transistor adalah komponen elektronika semikonduktor yang
memiliki 3 kaki elektroda, yaitu basis (dasar), kolektor (pengumpul) dan
emitor (pemancar). Komponen ini berfungsi sebagai penguat, pemutus dan
penyambung (switching), stabilitasi tegangan, modulasi sinyal dan masih
banyak lagi fungsi lainnya. Transistor dapat dilihat di Gambar 2.2.(Barry
Wollard, 2006).
Gambar 2.2 Transistor NPN dan PNP.
2.4 LCD (Liquid Cristal Display)
LCD adalah salah satu jenis teknologi yang telah ada sejak tahun
1888. LCD merupakan layar digital yang dapat menampilkan nilai yang
dihasilkan oleh sensor dan dapat menampilkan menu yang terdapat pada
Ada beberapa bagian dari rangkaian LCD yang sangat berfungsi. LCD dapat
dilihat pada Gambar 2.3.
Gambar 2.3 LCD.
2.4 LED (Light Emitting Diode)
Light emitting diode atau sering disingkat dengan LED adalah
komponen elektronika yang dapat memancarkan cahaya monokromatik
ketika diberikan tegangan maju. LED merupakan keluarga Dioda yang
terbuat dari bahan semikonduktor. Warna-warna Cahaya yang dipancarkan
oleh LED tergantung pada jenis bahan semikonduktor yang
dipergunakannya. LED juga dapat memancarkan sinar inframerah yang
tidak tampak oleh mata seperti yang sering kita jumpai pada remote control
TV ataupun Remote Control perangkat elektronik lainnya. LED dapat dilihat
di Gambar 2.4(Teknik Elektro, 2014).
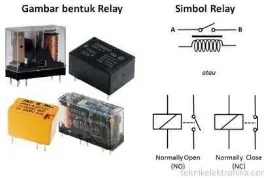
2.5 Relay
Relay adalah saklar (switch) yang dioperasikan secara listrik dan
merupakan komponen electromechanical (elektromekanikal) yang terdiri
dari 2 bagian utama yakni elektromagnet (coil) dan mekanikal (seperangkat
kontak saklar/switch). Relay menggunakan prinsip elektromagnetik untuk
menggerakkan kontak saklar sehingga dengan arus listrik yang kecil
(lowpower) dapat menghantarkan listrik yang bertegangan lebih tinggi.
Relay dapat dilihat di Gambar 2.5(Rida Angga, 2015).
Gambar 2.5Relay.
2.6 Mikrokontroler ATMega8535
ATMega8535 adalah mikrokontroler CMOS 8 bit daya rendah
berbasis arsitektur RISC. Instruksi dikerjakan pada satu siklus clock,
ATMega8535 mempunyai throughput mendekati 1 MIPS per MHz, hal ini
membuat ATMega8535 dapat bekerja dengan kecepatan tinggi walaupun
dengan penggunaan daya rendah. Mikrokontroler ATMega8535 memiliki
beberapa fitur atau spesifikasi yang menjadikannya sebuah solusi
pengendali yang efektif untuk berbagai keperluan(Iswanto, 2008). Fitur-fitur
1. Saluran I/O sebanyak 32 buah, yang terdiri atas Port A, B, C dan D
2. ADC (Analog to Digital Converter)
3. Tiga buah Timer/Counter dengan kemampuan perbandingan
4. CPU yang terdiri atas 32 register
5. Watchdog Timer dengan osilatorinternal
6. SRAM sebesar 512 byte
7. Memori Flash sebesar 8kb dengan kemampuan read while write
8. Unit Interupsi Internal dan External
9. Port antarmuka SPI untuk men-download program ke flash
10.EEPROM sebesar 512 byte yang dapat diprogram saat operasi
11.Antarmuka komparator analog
12.Port USART untuk komunikasi serial.
Mikrokontroler AVR ATMega8535 memiliki 40 pin dengan 32 pin
diantaranya digunakan sabagai port paralel. Satu port paralel terdiri dari 8
pin, sehingga jumlah port pada mikrokontroler adalah 4 port, yaitu port A,
port B, port C dan port D. Sebagai contoh adalah port A memiliki pin
antara port A.0 sampai dengan port A.7, demikian selanjutnya untuk port
B, port C, port D.
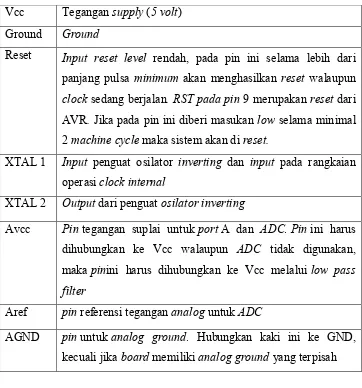
Berikut ini adalah Tabel 2.1 penjelasan mengenai pin yang terdapat
Tabel 2.1 Pin Pada Mikrokontroler ATMega8535.
Vcc Tegangan supply (5 volt)
Ground Ground
Reset Input reset level rendah, pada pin ini selama lebih dari
panjang pulsa minimum akan menghasilkan reset walaupun
clock sedang berjalan. RST pada pin 9 merupakan reset dari
AVR. Jika pada pin ini diberi masukan low selama minimal
2 machine cycle maka sistem akan di reset.
XTAL 1 Input penguat osilator inverting dan input pada rangkaian
operasi clock internal
XTAL 2 Output dari penguat osilator inverting
Avcc Pin tegangan suplai untuk port A dan ADC. Pin ini harus
dihubungkan ke Vcc walaupun ADC tidak digunakan,
maka pinini harus dihubungkan ke Vcc melalui low pass
filter
Aref pin referensi tegangan analog untuk ADC
AGND pin untuk analog ground. Hubungkan kaki ini ke GND,
kecuali jika board memiliki analog ground yang terpisah
Berikut ini adalah penjelasan dari pin mikrokontroler ATMega8535
dari masing-masing pin:
1. Port A
Pin 33 sampai dengan pin 40 merupakan pin dari port A.
Merupakan 8 bit directional port I/O. Masing-masing pin dapat
menyediakan internal pull-up resistor (dapat diatur per bit). Output buffer
port A dapat memberi arus 20 mA dan dapat mengendalikan display LED
di-setting terlebih dahulu sebelum port A digunakan. Bit-bit DDRA diisi 0
jika ingin memfungsikan pin-pin port A yang disesuaikan sebagai input,
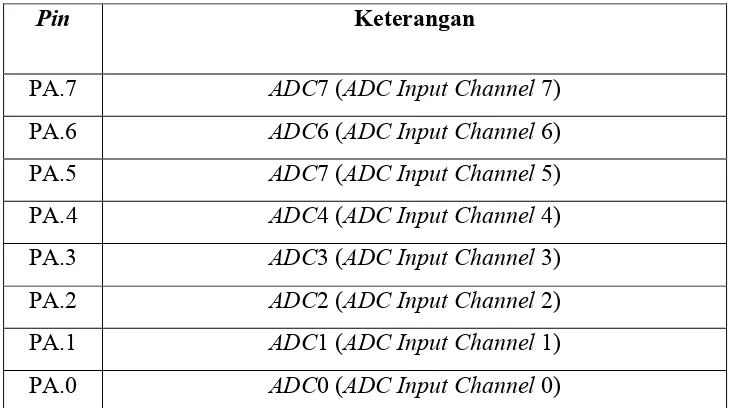
atau diisi 1 jika sebagai output. Selain itu, pin-pin pada port A juga
memiliki fungsi-fungsi alternatif khusus seperti yang dapat dilihat dalam
Tabel 2.2.
Tabel 2.2 Pin Pada Port A.
Pin Keterangan
PA.7 ADC7 (ADCInput Channel 7)
PA.6 ADC6 (ADCInput Channel 6)
PA.5 ADC7 (ADCInput Channel 5)
PA.4 ADC4 (ADCInput Channel 4)
PA.3 ADC3 (ADCInput Channel 3)
PA.2 ADC2 (ADCInput Channel 2)
PA.1 ADC1 (ADCInput Channel 1)
PA.0 ADC0 (ADCInput Channel 0)
2. Port B
Pin 1 sampai dengan pin 8 merupakan pin dari port B. Merupakan
8 bit directional port I/O. Masing-masing pin dapat menyediakan internal
pull-up resistor (dapat diatur per bit). Output buffer port B dapat memberi
arus 20 mA dan dapat mengendalikan display LED secara langsung. Data
Direction Register port B (DDRB) harus diatur terlebih dahulu
sebelum port B digunakan. Bit-bit DDRB diisi 0 jika ingin
jika sebagai output. Selain itu, pin-pin port B juga memiliki fungsi-fungsi
alternatif khusus seperti yang dapat dilihat dalam Tabel 2.3.
Tabel 2.3 Pin pada port B.
Pin Keterangan
PB.7 SCK (SPI Bus Serial Clock)
PB.6 VISO (SPI Bus Master Input/Slave Output)
PB.5 VOSI (SPI Bus Master Output/Slave Input)
PB.4 SS (SPI Slave Select Input)
PB.3 AIN1 (Analog Comparator Negative Input)OCC
(Timer/Counter0 Output Compare Match Output)
PB.2 AIN0 (Analog Comparator Positive Input)INT2 (External
Interrupt2 Input)
PB.1 T1 (Timer/Counter1 External Counter Input)
PB.0 T0 (Timer/Counter0 External Counter Input)XCK
(JSART External Clock Input/Output)
3. Port C
Pin 22 sampai dengan pin 29 merupakan pin dari port C. Port C
sendiri merupakan port input atau output. Masing-masing pin dapat
menyediakan internal pull-up resistor (dapat diatur per bit).Output buffer
port C dapat memberi arus 20 mA dan dapat mengendalikan display LED
secara langsung. Data Direction Register port C (DDRC) harus di
atur terlebih dahulu sebelum portC digunakan. Bit-bit DDRC diisi 0 jika
diisi 1 jika sebagai output. Selain itu, pin-pinport D juga memiliki
fungsi-fungsi alternatif khusus seperti yang dapat dilihat dalam Tabel 2.4.
Tabel 2.4 Pin Pada Port C.
Pin Keterangan
PC.7 TOSC2 (Timer Oscillator Pin 2)
PC.6 TOSC1 (Timer Oscillator Pin 1)
PC.1 SDA (Two-Wire Serial Bus Data Input/OutputLine)
PC.0 SCL (Two-Wire Serial Bus Clock Line)
4. Port D
Pin 14 sampai dengan pin 20 merupakan pin dari port D.
Merupakan 8 bit directional port I/O. Masing-masing pindapat
menyediakan internal pull-up resistor (dapat diatur per bit). Output buffer
port D dapat memberi arus 20 mA dan dapat mengendalikan display LED
secara langsung. Data Direction Register port D (DDRD) harus di
atur terlebih dahulu sebelum port D digunakan. Bit-bit DDRD diisi 0 jika
ingin memfungsikan pin-pinport D yang disesuaikan sebagai input, atau
diisi 1 jika sebagai output. Selain itu, pin-pinport D juga memiliki
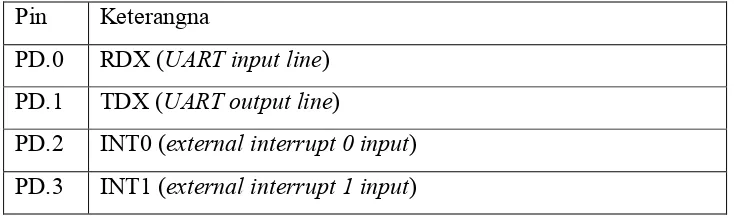
fungsi-fungsi alternatif khusus seperti yang dapat dilihat dalam Tabel 2.5.
Tabel 2.5 Pin Pada Port D.
Pin Keterangna
PD.0 RDX (UART input line)
PD.1 TDX (UART output line)
PD.2 INT0 (external interrupt 0 input)
Tabel 2.5 Pin Pada Port D (lanjutan).
PD.4 OC1B (Timer/Counter1 output compareB match output)
PD.5 OC1A (Timer/Counter1 output compareA match output)
PD.6 ICP (Timer/Counter1 input capture pin)
15
BAB III
METODE PENELITIAN
3.1 Perancangan Perangkat Keras 3.1.1 Blok Diagram
Diagram blok pengembangan breastpump elektrik berbasis
mikrokontroler ATMega8535 dilengkapi dengan pengatur waktu dan
tekanan dapat dilihat pada Gambar 3.1.
Gambar 3.1Blok Diagram.
Tombol Up/Down digunakan untuk pemilihan timer. Tombol Enter
digunakan untuk mengeksekusi program yang telah dipilih melalui tombol
up/down. Reset digunakan untuk membalikan program ke awal, mulai dari
inisialisasi LCD. LCD sebagai tampilan dan buzzer sebagai indikator.
Mikrokontroler akan mengeluarkan logika 0 atau 1 dan
mengumpankannya pada driver dan buzzer. Logika 0 dan 1 dari
Enter
µc
Program Up/Down
Reset
LCD
Buzzer
Driver
mikrokontroler mengatur aktif dan tidaknya driver. Ketika Driver aktif
maka motor bekerja. Ketika motor bekerja, proses cupping/penghisapan
dimulai.
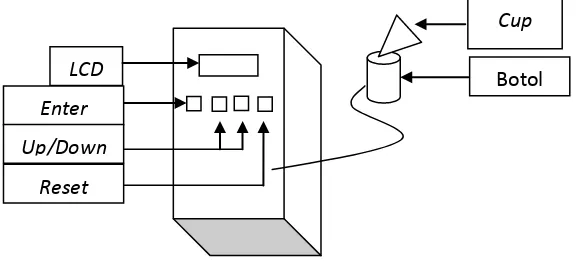
3.1.2 Diagram Mekanis Sistem
Diagram mekanis sistem dari pengembangan breastpump elektrik
berbasis mikrokontroler ATMega8535 dilengkapi dengan pengatur waktu
dan tekanan dapat dilihat pada Gambar 3.2.
Gambar 3.2Diagram Mekanis Sistem.
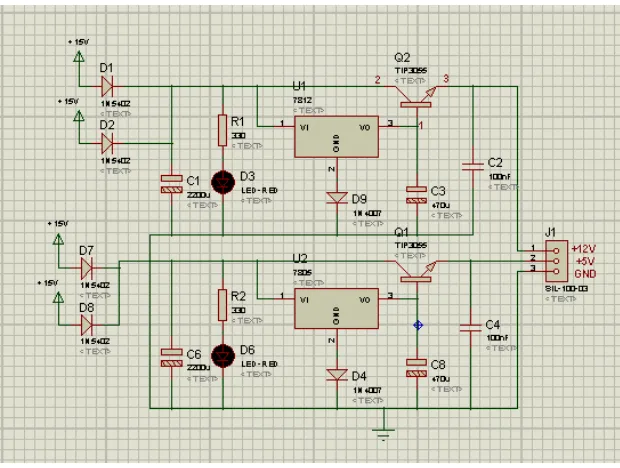
3.1.3 Rangkaian Power Supply
Rangkaian power supply ialah sumber tegangan AC yang akan
diubah menjadi tegangan DC kemudian turun menjadi keluaran 9 Volt dan
5 Volt. Skematik rangkaian power supply dapat dilihat di Gambar 3.3 dan
layoutPowerSupply dapat dilihat di Gambar 3.4. LCD
Enter
Up/Down
Reset
Cup
Gambar 3.3 Skematik Rangkaian Power Supply.
Perhitungan untuk pemilihan nilai resistor :
�� =� + �
15 � =�� + 1,5
15 � = 20 ��
15 � −1,5 = 20 ��
13,5 � 200 ��
= 13,5 �
200 �
Gambar 3.4 Layout Power Supply.
3.1.4 Rangkaian Driver
Rangkaian driver sebagai pengontak dari perintah sistem ke motor
apabila diberi logika 1 maka driver akan bekerja dan relay mengontak
motor untuk bekerja. Skematik dari rangkaian driver dapat dilihat di
Gambar 3.5.
Gambar 3.5 Skematik Rangkaian Driver
3.1.5 Rangkaian Minimum Sistem
Minimum sistem digunakan sebagai pengatur atau otak dari alat dan
pengatur driver motor. Skematik dari rangkaian minimum sistem dapat
dilihat di Gambar 3.6 dan layout dari minimum sistem dapat dilihat di
Gambar 3.6 Skematik Rangkaian Minimum Sistem.
3.2 Perancangan Perangkat Lunak 3.2.1 Diagram Alir
Diagram alir dari breastpump elektrik dapat dilihat di Gambar 3.8.
Yes
No
Gambar 3.8 Diagram Alir.
Pertama kita memilih waktu yang akan digunakan (1-15 menit),
selanjutnya tekan enter, kemudian motor akan bekerja/memulai
pemvakuman, tekanan mulai bekerja. Setelah itu kita dapat secara manual
mengatur tekanan yang diinginkan dengan cara memutar knop, jika waktu Motor Berhenti
Volume Tercapai Pengaturan Waktu
BEGIN
Waktu Tercapai
END
sudah tercapai tetapi volume belum tercapai maka motor akan berhenti,
jika waktu belum tercapai dan volume sudah tercapai motor akan berhenti,
jika waktu dan volume sudah tercapai, motor akan berhenti.
3.2.2 Program
Untuk pembuatan program pada modul ini menggunakan aplikasi
AVR dengan bahsa C. Program yang digunakan ialah program ADC
sebagai pengendali driver dan timer sebagai pengontrol waktunya.
Berikut langkah-langkah settingtimer :
1. Memilih timer yang digunakan dalam pengaturan timer dapat dilihat
pada Gambar 3.9.
2. Setelah memilih timer, kemudian atur timer sesuai yang dipilih.
Pemilihan timer dapat dilihat pada Gambar 3.10.
3. Kemudian atur clock value untuk mengaktifkan interrupt overflow
timer1. Setting clock value dapat dilihat pada Gambar 3.11.
4. Kemudian beri tanda centang pada interrupt on, hal ini berfungsi agar
ada dua program yang berjalan. Setting interrupt on bisa dilihat pada
Gambar 3.12.
5. Kemudian ubah value dengan setting 0bdc. Setting value dapat dilihat
di Gambar 3.13.
Listing program timer diperlihatkan pada Listing 3.1.
Listing 3.1 Program Timer.
Listing program timer ini digunakan sebagai pengatuan timer
waktu saat sistem bekeja, waktu yang diatur dalam listing program
ini yaitu 1 sampai 15 menit dengan metode counter down.
void setting_timer()
// Declare your global variables here
Listing Program ADC diperlihatkan pada Listing 3.2.
Listing 3.2 Program ADC.
Listing ADC (Analog To Digital Converter) adalah perangkat
elektronika yang berfungsi untuk mengubah sinyal analog (sinyal
kontinyu) menjadi sinyal digital. Perangkat ADC (Analog To Digital
Convertion) dapat berbentuk suatu modul atau rangkaian elektronika
maupun suatu chip IC. ADC (Analog To Digital Converter)
berfungsi untuk menjembatani pemrosesan sinyal analog oleh sistem
digital(Iswanto, 2008).
#define ADC_VREF_TYPE 0x40
// Read the AD conversion result
unsigned int read_adc(unsigned char adc_input)
{
ADMUX=adc_input | (ADC_VREF_TYPE & 0xff);
// Delay needed for the stabilization of the ADC input voltage
delay_us(10);
// Start the AD conversion
ADCSRA|=0x40;
// Wait for the AD conversion to complete
while ((ADCSRA & 0x10)==0);
ADCSRA|=0x10;
3.3 Perancangan Pengujian 3.3.1 Jenis Pengujian
1. Mengukur tegangan menggunakan alat ukur multimeter pada
tekanan breastpump bertujuan untuk perbandingan.
2. Uji tekanan dengan praktek langsung pada ibu menyusui.
3. Kalibrasi tekanan breastpump dengan Dpm.
4. Mengukur waktu dengan menggunakan stopwatch.
3.3.2 Pengolahan Data
Jenis penelitian ini menggunakan metode Pre Eksperimental dengan
jenis “One group Post Test Design” yaitu alat breastpump ini bekerja
dengan tekanan dan timer yang di atur kemudian motor akan berhenti
apabila tekanan tercapai/waktu telah tercapai kemudian proses selesai.
Sehingga penulis hanya melihat hasil tanpa mengukur keadaan
sebelumnya.
Desain dapat digambarkan sbb :
X O
X = treatment/perlakuan yang diberikan (varibel independen)
O = Observasi (variabel dependen)
Variabel Penelitian
1. Variabel Bebas
2. Variabel Tergantung
Sebagai variabel tergantung yaitu pengontrol untuk tekanan (knop).
3. Variabel Terkendali
Variabel terkendali terdiri dari tampilan tekanan dan waktu yang
dikendalikan oleh Mikrokontroler ATMega8535.
3.3.3 Sistematika Pengukuran 1. Rata-Rata Pengukuran
Adalah nilai atau hasil pembagian dari jumlah data yang
diambil atau diukur dengan banyaknya pengambilan data atau
banyaknya pengukuran. Rata-rata pengukuran dirumuskan
sebagai berikut :
� = � (3-1)
dengan :
� = Rata – rata
� = Jumlah � sebanyak
= Banyak data
2. Simpangan (Error)
Adalah selisih dari rata-rata nilai dari harga yang
dikehendaki dengan nilai yang diukur. Simpangn (error)
� � �� =� − � (3-2)
dengan :
� � �� = Nilai error yang dihasilkan
� = Rata – rata data DPM
� = Rata – rata data modul
3. Persentase Error
Adalah nilai persen dari simpangan (Error) terhadap nilai
yang dikehendaki. Presentase error dirumuskan sebagai berikut :
�� � � � = � � ��
� � 100%
(3-3)
dengan :
�� � � � = Besarnya simpangan/nilai
error dalam %
� = Rata-rata data kalibrator
4. Standard Deviasi (SD)
Adalah suatu nilai yang menunjukkan tingkat v(derajat)
variasi kelompok data atau ukuran standard penyimpanan dari
tersebut semakin presesi. Standard deviasi dirumuskan sebagai
berikut :
� = (�1− � )
2+ �
2− � 2+⋯+ (� − � )2
−1
(3-4)
dengan :
� = Standar deviasi
� = Data �
� = Rata-rata
32
4.1 Pengujian Tegangan
4.1.1 Pengukuran Tegangan Pada Tekanan Low
Dalam Tugas Akhir ini, pengujian pertama dilakukan dengan
mengukur tegangan motor pada saat tekanan low dan waktu diatur selama 5
menit. Tabel 4.1 menunjukkan hasil pengukuran tegangan yang dilakukan
dalam 30 kali percobaan.
Tabel 4.1 Pengukuran Tegangan Pada Tekanan Low.
Tabel 4.1. Pengukuran Tegangan Pada Tekanan Low (lanjutan).
Data ke- Data Ukur Tegangan
Pada Breastpump
Berdasarkan data pada tabel 4.1 maka diperoleh hasil perhitungan
seperti dibawah ini :
1. Rata-Rata (� ) persamaan (3-1).
� = (3,38 + 3,37 + 3,38 + 3,37 + 3,39 + 3,39 + 3,37 + 3,38 + 3,38 + 3,38 + 3,37 + 3,37 + 3,38 + 3,37 + 3,38 + 3,39 + 3,38 + 3,38
+ 3,38 + 3,38 + 3,37 + 3,39 + 3,39 + 3,37 + 3,39 + 3,37
� = 3,37
2. Simpangan Error persamaan (3-2).
� � �� = 3,38−3,37
� � �� = 0,01
3. Persentase Error persamaa (3-3).
�� � � � =3,38−3,37
30 � 100 %
�� � � � = 0,0003 %
4. Satndard Deviasi (SD) persamaan (3-4).
� � � ���� �
= 0,01
4.1.2 Pengukuran Tegangan Pada Tekanan Medium
Pengujian kedua dilakukan dengan mengukur tegangan motor pada
saat tekanan medium dan waktu diatur selama 5 menit. Tabel 4.2
menunjukkan hasil pengukuran tegangan yang dilakukan dalam 30 kali
percobaan.
Tabel 4.2 Pengukuran Tegangan Pada Tekanan Medium.
Tabel 4.2 Pengukuran Tegangan Pada Tekanan Medium (lanjutan).
Berdasarkan data pada tabel 4.2 maka diperoleh hasil perhitungan
seperti dibawah ini :
1. Rata-Rata (� ) persamaan (3-1).
2. Simpangan Error persamaan (3-2).
� � �� = 4,21−4,14
3. Persentase Error persamaan(3-3).
�� � � � =4,21−4,14
30 �100%
�� � � � = 0,002 %
4. Standard Deviasi (SD) persamaan (3-4).
4.1.3 Pengukuran Tegangan Pada Tekanan High
Pengujian ketiga dilakukan dengan mengukur tegangan motor pada
saat tekanan high dan waktu diatur selama 5 menit. Tabel 4.3 menunjukkan
hasil pengukuran tegangan yang dilakukan dalam 30 kali percobaan.
Tabel 4.3 Pengukuran Tegangan Pada Tekanan High.
Tabel 4.3 Pengukuran Tegangan Pada Tekanan High (lanjutan).
Berdasarkan data pada tabel 4.3 maka diperoleh hasil perhitungan
seperti dibawah ini :
1. Rata-Rata (� ) persamaan (3-1).
2. Simpangan Error persamaan (3-2).
� � �� = 4,77−4,77
� � �� = 0
3. Persentase Error persamaan (3-3).
�� � � � =4,77−4,77
30 �100%
4. Standard Deviasi (SD) persamaan (3-4).
� � � ���� �
=√(((4,77−4,77)^2 + (4,79−4,77)^2 + (4,79−4,77)2
+ (4,77−4,77)2+ (4,78−4,77)2
+ (4,78−4,77)2+ (4,76−4,77)2
+ (4,78−4,77)2+ (4,79−4,77)2
+ (4,79−4,77)2+ (4,77−4,77)2
+ (4,78−4,77)2+ (4,78−4,77)2
+ (4,76−4,77)2+ (4,78−4,77)2
+ (4,79−4,77)2+ (4,79−4,77)2
+ (4,77−4,77)2+ (4,78−4,77)2
+ (4,79−4,77)2+ (4,79−4,77)2
+ (4,77−4,77)2+ (4,78−4,77)2
+ (4,79−4,77)2+ (4,79−4,77)2
+ (4,77−4,77)2+ (4,76−4,77)2
+ (4,78−4,77)2+ (4,77−4,77)2
+ (4,77−4,77)2)/29)
� � � ���� �
4.2 Pengujian Timer
4.1.4 Pengukuran Timer Dengan Waktu 5 menit
Pengujian keempat dilakukan dengan mengukur waktu breastpump
menggunakan stopwatch pada saat waktu 5 menit. Tabel 4.4 menunjukkan
hasil pengukuran waktu yang dilakukan dalam 30 kali percobaan.
Tabel 4.4 Pengukuran Waktu Pada Saat 5 menit.
Tabel 4.4 Pengukuran Waktu Pada Saat 5 menit (lanjutan).
21 5 menit 05,00
22 5 menit 05,00
23 5 menit 05,00
24 5 menit 05,00
25 5 menit 05,00
26 5 menit 05,00
27 5 menit 05,00
28 5 menit 05,00
29 5 menit 05,00
30 5 menit 05,00
Berdasarkan data pada tabel 4.4 maka diperoleh hasil perhitungan
seperti dibawah ini :
1. Rata-Rata (� ) persamaan (3-1).
� (05,00 + 05,00 + 05,00 + 05,00 + 05,00 + 05,00 + 05,00 + 05,00 + 05,00 + 05,00 + 05,00 + 05,00 + 05,00 + 05,00 + 05,00
+ 05,00 + 05,00 + 05,00 + 05,00 + 05,00 + 05,00
+ 05,00 + 05,00 + 05,00 + 05,00 + 05,00 + 05,00
+ 05,00 + 05,00 + 05,00)/30
� 05,00
2. Simpangan Error persamaan (3-2).
� � �� = 05,00−05.00
3. Persentase Error persamaan (3-3).
�� � � � =05,00−05,00
30 �100%
�� � � � = 0
4. Standard Deviasi (SD) persamaan (3-4).
4.1.5 Pengukuran Timer Dengan Waktu 10 menit
Pengujian kelima dilakukan dengan mengukur waktu breastpump
menggunakan stopwatch pada saat waktu 10 menit. Tabel 4.5 menunjukkan
hasil pengukuran waktu yang dilakukan dalam 30 kali percobaan.
Tabel 4.5 Pengukuran Waktu Pada Saat 10 menit.
Tabel 4.5 Pengukuran Waktu Pada Saat 10 menit (lanjutan).
22 10 menit 10,00
23 10 menit 10,00
24 10 menit 10,00
25 10 menit 10,00
26 10 menit 10,00
27 10 menit 10,00
28 10 menit 10,00
29 10 menit 10,00
30 10 menit 10,00
Berdasarkan data pada tabel 4.5 maka diperoleh hasil perhitungan
seperti dibawah ini :
1. Rata-Rata (� ) persamaan (3-1).
� = (10,00 + 10,00 + 10,00 + 10,00 + 10,00 + 10,00 + 10,00 + 10,00 + 10,00 + 10,00 + 10,00 + 10,00 + 10,00 + 10,00
+ 10,00 + 10,00 + 10,00 + 10,00 + 10,00 + 10,00
+ 10,00 + 10,00 + 10,00 + 10,00 + 10,00 + 10,00
+ 10,00 + 10,00 + 10,00 + 10,00)/30
� = 10.00
2. Simpangan Error persamaan (3-2).
� � �� = 10,00−10,00
3. Persentase Error persamaan (3-3).
�� � � � =10,00−10,00
30 �100%
�� � � � = 0
4. Satndard Deviasi (SD) persamaan (3-4).
4.1.6 Pengukuran Timer Dengan Waktu 15 menit
Pengujian keenam dilakukan dengan mengukur waktu breastpump
menggunakan stopwatch pada saat waktu 15 menit. Tabel 4.6 menunjukkan
hasil pengukuran waktu yang dilakukan dalam 30 kali percobaan.
Tabel 4.6 Pengukuran Waktu Pada Saat 15 menit.
Tabel 4.6 Pengukuran Waktu Pada Saat 15 menit (lanjutan).
21 15 menit 15,00
22 15 menit 15,00
23 15 menit 15,00
24 15 menit 15,00
25 15 menit 15,00
26 15 menit 15,00
27 15 menit 15,00
28 15 menit 15,00
29 15 menit 15,00
30 15 menit 15,00
Berdasarkan data pada tabel 4.6 maka diperoleh hasil perhitungan
seperti dibawah ini :
1. Rata-Rata (� ) persamaan (3-1).
� = (15,00 + 15,00 + 15,00 + 15,00 + 15,00 + 15,00 + 15,00 + 15,00 + 15,00 + 15,00 + 15,00 + 15,00 + 15,00 + 15,00 + 15,00 + 15,00
+ 15,00 + 15,00 + 15,00 + 15,00 + 15,00 + 15,00 + 15,00
+ 15,00 + 15,00 + 15,00 + 15,00 + 15,00 + 15,00
+ 15,00)/30
� = 15,00
2. Simpangan Error persamaan (3-2).
� � �� = 15,00−15,00
3. Persentase Error persamaan (3-3).
�� � � � =15,00−15,00
30 �100%
�� � � � = 0
4. Standard Deviasi (SD) persamaan (3-4).
4.3 Pembahasan
Berdasarkan pengambilan data yang telah dilakukan pengukuran
tegangan terhadap tekanan pada breastpump didapatkan beberapa hasil
pengukuran tegangan yang berbeda, sehingga untuk tegangan di tekanan
low didapatkan rata-rata untuk 30 kali pengukuran sebesar 3,37 V,
berdasarkan data tersebut ternyata dihasilkan nilai simpangan (error)
sebesar 0,01 V. Jadi dapat disimpulkan bahwa besarnya nilai error yang
didapatkan dari data tersebut sebesar 0,0003% dan nilai standar
penyimpangan yang dihasilkan yaitu sebesar 0,01. Sedangkan untuk
tegangan di tekanan medium didapatkan rata-rata sebesar 4,14 V untuk 30
kali pengukuran, berdasarkan data tersebut dihasilkan nilai simpangan
(error) sebesar 0,07 V. Dan diperoleh nilai error sebesar 0,002% dengan
standard penyimpangan yang dihasilkan yaitu 0,06. Sedangkan untuk
tegangan di tekanan high diperoleh rata-rata sebesar 4,77 V, nilai error
sebesar 0% dengan standard penyimpangan 0,06.
Untuk pengambilan data waktu 5 menit diperoleh rata-rata waktu
selama 05,00 menit sehingga terdapat penyimpangan 0 dan error 0%
sedangkan standard penyimpangan yang dihasilkan yaitu sebesar 0.
Sedangkan untuk pengambilan data waktu 10 menit diperoleh rata-rata
waktu selama 10,00 menit sehingga terdapat penyimpangan 0 dan error 0%
sedangkan standard penyimpangan yang dihasilkan yaitu sebesar 0. Dan
15,00 menit sehingga terdapat penyimpangan 0 dan error 0% sedangkan
standard penyimpangan yang dihasilkan yaitu sebesar 0.
Berdasarkan perhitungan yang sudah dilakukan, sehingga dapat
disimpulkan bahwa semakin kecil nilai standard deviasi penyimpanan maka
semakin presisi data yang dihasilkan. Dan semakin kecil nilai error
52
BAB V PENUTUP
5.1 Kesimpulan
Setelah melakukan proses pembuatan, percobaan, pengujian alat dan
pendataan, penulis dapat menyimpulkan sebagai berikut :
1. Pengembangan breastpump elektrik berbasis mikrokontroler
ATMega8535 dengan dilengkapi pengatur timer dan tekanan ini dapat
bekerja dengan baik.
2. Pada relay 12VDC dapat menjadi driver untuk mengaktifkan tegangan
220 VAC.
3. Pada LCD dapat menampilkan setting timer dan tekanan.
4. Dari hasil pengukuran di dapatkan kesalahan nilai error yaitu:
Untuk pengukuran tegangan pada saat tekanan low disimpulkan
memiliki hasil tingkat kesalahan (%error) sebesar 0,0003%, pada
tekanan medium disimpulkan memiliki tingkat kesalahan (%error)
sebesar 0,0002%, pada saat tekanan high disimpulkan memiliki tingkat
kesalahan (%error) sebesar 0%. Sedangkan untuk waktu pemvakuman
denagan 5,10,15 menit disimpulkan memiliki hasil tingkat
kesalahan(%erorr) sebesar 0%. Jadi berdasarkan hasil pengukuran dan
dapat bekerja dengan baik dan bisa dimanfaatkan sebagai pemvakuman
untuk ASI.
5.2 Saran
Setelah melakukan proses pembuatan, percobaan, pengujian alat dan
pendataan, penulis memberikan saran sebagai pengembangan peneliti
selanjutnya sebagai berikut:
1. Dalam setiap melakukan kegiatan agar lebih memperhatikan
keselamatan terutama saat pembuatan modul.
2. Pembuatan modul dapat dikembangkan menjadi portable.
3. Pembuatan modul dapat dikembangkan dengan adanya sterilisasi botol
susu dan sekaligus penghangat susu.
4. Pembuatan modul dapat dikembangkan dengan flow tekanan.
5. Pembuatan chasing dapat diperbaiki lagi untuk menambahkan kesan
indah.
6. Untuk mendapatkan hasil yang lebih akurat harus dilakukan
pengukuran kecepatan putar motor, kecepatan putar motor berbanding
lurus dengan daya hisap yang diperoleh untuk hasil dari pemvakuman.
Namun karena keterbatasan dalam penelitian ini sehingga tidak
dilakukan. Penyebabnya adalah tidak adanya celah dalam konstruksi
motor, sehingga tidak bisa dilakukan karena sistem breastpump ini
menggunakan motor mikro yang sudah ada dipasaran. Namun sebagai
54 Delapan Ruangan), pp.153–159.
Barry Wollard, 2006. Elektronika Praktis. Jakarta:PT Pradnya Paramita.
Chamim, A.N.N., Ahmadi, D. & Iswanto, 2016. Atmega16 Implementation As Indicators Of Maximum Speed. International Journal of Applied
Engineering Research ISSN, 11(15), pp.8432–8435.
Chamim, A.N.N. & Iswanto, 2011. Implementasi Mikrokontroler Untuk Pengendalian Lampu Dengan Sms. In Prosending Retii 6.
Hidayat, L., Iswanto & Muhammad, H., 2015. Perancangan Robot Pemadam Api Divisi Senior Berkaki. Jurnal Semesta Teknika, 14(2), pp.112–116.
Iswanto, 2008. Design dan Implementasi Sistem Embedded Mikrokontroler ATMEGA8535 dengan Bahasa Basic, Yogyakarta: Gava Media.
Iswanto, dan Raharja Maharani, N. 2015. Mikrokontroler Teori dan Praktek ATMEGA16 Dengan Bahasa C. Yogyakarta : CV BUDI UTAMA
Iswanto, I. & Setiawan, R.D., 2013. Power Saver with PIR Sensor. Journal of Control & Instrumentation, 4(3), pp.26–34.
ISWANTO, JAMAL, A. & SETIADY, F., 2011. Implementasi Telepon Seluler sebagai Kendali Lampu Jarak Jauh. Jurnal Ilmiah Semesta Teknika, 14(1), pp.81–85.
ISWANTO & MUHAMMAD, H., 2012. WEATHER MONITORING STATION WITH REMOTE RADIO FREQUENCY WIRELESS
COMMUNICATIONS. International Journal of Embedded Systems and Applications (IJESA), 2(3), pp.99–106.
Iswanto & Raharja, N.M., 2015. Mikrokontroller: Teori dan Praktik Atmega 16 dengan Bahasa C, Penerbit Deepublish.
Muhammad, H. & Iswanto, 2013. EGT 10 Design and Application For Position.
International Journal of Mobile Network Communications & Telematics ( IJMNCT), 3(3), pp.1–8.
Sadad, R.T.A. & Iswanto, 2010. Implementasi Mikrokontroler Sebagai
Pengendali Kapasitor Untuk Perbaikan Faktor Daya Otomatis pada Jaringan Listrik. SEMESTA TEKNIKA, 13(2), pp.181–192.
55
International Journal of Mobile Network Communications & Telematics (IJMNCT), 2(5), pp.13–24.
Shofan. 2015. KTI Bekam Elektronik Berbasis Mikrokontroler ATMega8 Dilengkapi Dengan Pengatur Waktu, Pengatur Tekanan dan Sensor Keselamatan.
Tunggal, T.P., Latif, A. & Iswanto, 2016. Low-cost portable heart rate monitoring based on photoplethysmography and decision tree. In ADVANCES OF SCIENCE AND TECHNOLOGY FOR SOCIETY: Proceedings of the 1st International Conference on Science and Technology 2015 (ICST-2015). p. 090004. Available at:
http://scitation.aip.org/content/aip/proceeding/aipcp/10.1063/1.4958522.
Wahyudianto, A., Iswanto & Chamim, A.N.N., 2013. ALAT PENGONTROL LAMPU MENGGUNAKAN REMOTE TV UNIVERSAL. In SEMINAR NASIONAL ke 8 Tahun 2013. pp. 112–116.
Widodo Budiharto, 2011. Aneka Proyek Mikrokontroler. Jakarta:Garaha Ilmu
Nugroho. 2012. Breastpump.
http://ni-nugroho.blogspot.co.id/2012/12/breastpump-o-breastpump.html?m=1
Oregon Wig Program.
http://public.health.oregon.gov/HealthyPeopleFamilies/wic/Documents/bf/ PressureGaugeHowTo.pdf
Rida Angga.2015. Pengertian Relay dalam Rangkaian Elektronika.
http://skemaku.com/pengertian-relay-dalam-rangkaian-elektronika/
Teknik Elektro. 2014. Light Emitting Diode.
http://elq14.blogspot.co.id/2015/01/tentangled.html
Utami, Roesli. 2004. Pengertian Air Susu Ibu (ASI)
http://ilmugreen.blogspot.co.id/2012/07/pengertian-air-susu-ibu-asi.html
Usmust. 2011. Belajar Lewat Tutorial.
Breastpump Dari Samping Kiri