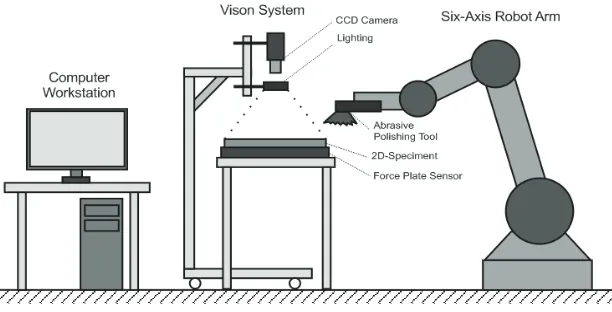
Computer Vision Based Robotic Polishing Using Artificial Neural Networks.
Teks penuh
Gambar

Dokumen terkait
It can be concluded that the most students at the second grade of SMP Al Kautsar have not mastered yet in transforming voice of simple past tense, especially in transforming
DINAS KOPERASI UMKM PERINDUSTRIAN PERDAGANGAN DAN PERTANIAN KOTA CIMAHI TAHUN 2012 MLKJIHGFEDCBA.
Pada mata kuliah orchestra ini juga melatih mahasiswa bagaimana menyelaraskan musik dari instrumen yang satu dengan instrumen yang lain, karena permainan sebuah
[r]
Sari Novalianda, Menik Ariani, Fiber Monado, Zaki Su’Ud/Studi Awal Perhitungan Sel Bahan Bakar Berbasis Uranium Oksida (UO 2 ) pada Reaktor Cepat Berpendingin
18 Penelitian mengenai cystatin C sebagai penanda fungsi ginjal pada pasien anak dengan PGK. belum pernah dilakukan di RS H.Adam
The conclusions from the results of this study in principles are : (1) It has successfully formulated three regression equations of thermal comfort in outdoor space
Berdasarkan Berita Acara Hasil Pelelangan Nomor : BA/17/I/2015/ULP, tanggal 22 Januari 2015, sehubungan dengan pengadaan pekerjaan tersebut di atas, kami Unit
