SISTEM KENDALI KECEPATAN MOTOR DC DENGAN MENGGUNAKAN MIKROKONTROLER
Tugas Akhir Ini Disusun Sebagai Salah Satu Syarat Menjadi Sarjana Pada Departemen Teknik Elektro Fakultas Teknik Universitas Sumatera Utara
Disusun Oleh
NAMA : CHANDRA PUTRA O.SUNGGU
NIM : 070422015
PROGRAM PENDIDIKAN SARJANA EKSTENSION
DEPARTEMEN TEKNIK ELEKTRO
FAKULTAS TEKNIK
UNIVERSITAS SUMATERA UTARA
KATA PENGANTAR
Ucapan syukur yang sebesar-besarnya penulis panjatkan ke Hadirat Tuhan yang Maha Esa atas berkat, karunia dan rahmatNya sehingga penulis dapat menyelesaikan Tugas Akhir ini.
Tugas Akhir ini merupakan suatu syarat bagi penulis untuk memperoleh gelar Sarjana Teknik dari Departemen Teknik Elektro Fakultas Teknik Universitas Sumatera Utara, Medan
Penulis mengucapkan terima kasih yang sebesar-besarnya kepada kedua orang tua penulis Bapak R.Ompusunggu dan Ibu R.Simanjuntak yang selalu bersedia member banyak dukungan moril maupun spiritual kepada penulis dari kecil hingga saat ini.
Dengan selesainya Tugas Akhir ini, penulis juga hendak mengucapkan terima kasih kepada semua pihak yang telah membantu penulis dalam penyelesaian Tugas Akhir ini, antara lain :
1. Bapak Ir.Surya Tarmizi Kasim, MSi selaku Ketua Departemen Teknik Elektro FT-USU dan Bapak Rahmad Fauzi, ST, MT selaku Sekretaris Departemen Teknik Elektro FT-USU.
2. Bapak Ir. A. Rachman Hasibuan, selaku dosen pembimbing penulis yang telah banyak membantu penulis dalam menyelesaikan Tugas Akhir ini.
3. Bapak Ir. M. Zulfin, MT yang telah membimbing penulis selama menjalani masa perkuliahan.
5. Saudara – saudaraku Yetti, Tommy dan Orlando yang selalu memberi dukungan.
6. Andika, Willy dan Ricky Soaloon yang selalu bersedia membantu penulis 7. Semua rekan-rekan penulis di Elektro-ext 07 dan para kantiners, yang selalu
mendukung dan mendoakan penulis.
8. Dan semua yang telah membantu penulis baik moril maupun materil yang tidak dapat penulis sebutkan satu persatu.
Penulis menyadari bahwa tulisan ini masih jauh dari sempurna serta banyak terdapat kekurangan. Untuk itu penulis mengharapkan kritik dan saran yang bersifat membangun demi penyempurnaan Tugas Akhir ini.
Akhirnya penulis berharap Tugas Akhir ini dapat bermanfaat bagi kita semua
Medan,
ABSTRAK
Motor DC merupakan alat pengubah energi listrik menjadi energi gerak yang dicatu oleh tegangan DC. Kecepatan putaran dapat diatur dengan mengubah nilai tegangan atau arus yang masuk ke motor. Salah satu cara pengaturan kecepatan pada motor DC yaitu dengan menggunakan DC-DC konverter atau sering disebut dengan chopper. Chopper adalah suatu alat yang berfungsi untuk mengubah tegangan DC tetap menjadi tegangan DC yang bervariasi. Tegangan keluaran chopper dapat lebih besar atau lebih kecil dari tegangan inputnya.
Chopper yang dibuat dalam tugas akhir ini menggunakan mikrokontroler jenis
ATMega8535 sebagai pengendali utama yang berfungsi menghasilkan PWM (Pulse Width Modulation) yang kemudian digunakan untuk mengendalikan pensaklaran
pada transistor. Untuk pensaklarannya digunakan transistor MOSFET ( Metal-Oxide Semiconductor Field Effect Transistor ). Percobaan ini dilakukan dengan mengubah
nilai duty cycle.
DAFTAR ISI
KATA PENGANTAR ... i
ABSTRAK ... iii
DAFTAR ISI ... iv
BAB I PENDAHULUAN I.1. Latar Belakang ... 1
I.2. Tujuan Penulisan ... 1
I.3. Batasan Masalah ... 2
I.4. Metode Penulisan ... 2
I.5. Sistematika Penulisan ... 2
BAB II MOTOR ARUS SEARAH II.1 Umum ... 4
II.2 Konstruksi Motor Arus Searah ... 5
II.3 Prinsip Kerja Motor Arus Searah………10
II.4 Jenis-jenis Motor Arus Searah………15
II.4.1 Motor Arus Searah Penguatan Bebas………15
II.4.2 Motor Arus Searah Penguatan Shunt………16
II.4.3 Motor Arus Searah Penguatan Seri………...17
II.4.4 Motor Arus Searah Penguatan Kompon………17
BAB III JENIS-JENIS PENGATURAN KECEPATAN MOTOR DC III.1 Umum………19
III.2 Pengaturan Medan……….19
III.3 Pengaturan Tegangan………..21
III.3.1 Kontrol Phasa………..………22
III.3.3 Kontrol Chopper……….26
III..4 Pengaturan Tahanan Jangkar……….34
BAB IV PENGATURAN KECEPATAN MOTOR DC DENGAN MENGGUNAKAN MIKROKONTROLER IV.1 Umum………35
IV.2 Perangkat Keras……….36
IV.3 Rangkaian Pengujian……….45
IV.3.1 Rangkaian Kendali Kecepatan Motor DC Penguatan Bebas………45
IV.3.1.1 Prosedur Pengujian………..45
IV.3.2. Rangkaian Kendali Kecepatan Motor DC Penguatan Bebas dengan menggunakan Mikrokontroler……….46
IV.3.2.1 Prosedur Pengujian………..47
IV.4. Data Hasil Pengujian………47
IV.4.1 Data Hasil Pengujian Penguatan Bebas……….47
IV.4.2 Data Hasil Pengujian Penguatan Bebas Dengan Menggunakan Mikrokontroler………..48
IV.5. Analisa Data Hasil Pengujian………...48
BAB V KESIMPULAN………..50 DAFTAR PUSTAKA
ABSTRAK
Motor DC merupakan alat pengubah energi listrik menjadi energi gerak yang dicatu oleh tegangan DC. Kecepatan putaran dapat diatur dengan mengubah nilai tegangan atau arus yang masuk ke motor. Salah satu cara pengaturan kecepatan pada motor DC yaitu dengan menggunakan DC-DC konverter atau sering disebut dengan chopper. Chopper adalah suatu alat yang berfungsi untuk mengubah tegangan DC tetap menjadi tegangan DC yang bervariasi. Tegangan keluaran chopper dapat lebih besar atau lebih kecil dari tegangan inputnya.
Chopper yang dibuat dalam tugas akhir ini menggunakan mikrokontroler jenis
ATMega8535 sebagai pengendali utama yang berfungsi menghasilkan PWM (Pulse Width Modulation) yang kemudian digunakan untuk mengendalikan pensaklaran
pada transistor. Untuk pensaklarannya digunakan transistor MOSFET ( Metal-Oxide Semiconductor Field Effect Transistor ). Percobaan ini dilakukan dengan mengubah
nilai duty cycle.
BAB I PENDAHULUAN I.1. Umum
Pada motor arus searah (DC) energi listrik dirubah menjadi energi mekanik. Dalam dunia industri motor arus searah banyak digunakan sebagai motor penggerak. Pemilihan motor arus searah sebagai motor penggerak dibandingkan motor induksi maupun motor sinkron karena motor arus searah memiliki rentang pengaturan kecepatan yang lebar ataupun pengaturan yang teliti pada keluaran rotornya. Pengaturan kecepatan motor arus searah juga sangat mudah dilakukan dalam berbagai kecepatan dan beban variasi,
rangkaian jangkar pada motor-motor seri. Cara yang paling umum dilakukan adalah mengatur tegangan terminal jangkar (armature terminal voltage control), yaitu dengan mengubah-ubah besar tegangan yang diberikan pada terminal jangkar untuk menghasilkan putaran yang diinginkan dengan menggunakan sistem PWM untuk mengubah frekuensi sumber tegangan dimana mempunyai kelebihan yaitu mampu menggerakkan motor arus searah dengan putaran halus dan rentang yang lebar dan menghasilkan kendali kecepatan lebih baik dari metode lainnya
I.2. Tujuan Penulisan
Mengimplementasikan rancangan pembangkit sinyal PWM dengan menggunakan mikrokontroler AT8535 untuk sistem kendali kecepatan motor DC.
I.3 Batasan Masalah
1. Perancangan perangkat keras untuk sistem minimum mikrokontroler AT8535
2. Sensor penghitung kecepatan motor adalah optocoupler
3. Perancangan pembangkit sinyal PWM yang diimpelementasikan dengan mikrokontroler sebagai teknik pengubah tegangan untuk mengendalikan kecepatan motor DC.
I.4 Metode Penulisan
Dalam pengerjaan penelitian ini, diperlukan langkah-langkah yang baik untuk mendapatkan hasil yang maksimal. Untuk itu penulis telah merencanakan langkah – langkah yang akan dilakukan, yaitu sebagai berikut:
2. Perancangan perangkat keras.
3. Perancangan sistem pengaturan dan program mikrokontroler.
4. Pengujian
I.5. Sistematika Penulisan.
Untuk mempermudah pembahasan dan pemahaman, maka penulis membuat sistematika penulisan Tugas Akhir ini sebagai berikut:
BAB 1.Pendahuluan
Meliputi latar belakang masalah, rumusan masalah, tujuan penulisan, batasan masalah, manfaat penulisan, metodologi penulisan dan sistematika penulisan.
BAB 2.Landasan Teori
Dalam bab ini akan dijelaskan tentang motor arus searah secara teoritis , jenis- jenis motor arus searah.
BAB 3 .Jenis-jenis Pengendalian Motor Arus Searah
Dalam Bab ini meliputi tentang tinjauan mengenai jenis-jenis pengontorolan kecepatan motor arus searah .
BAB 4.Pengaturan Kecepatan Motor Arus Searah dengan Mikrokontroler
Bab ini akan menunjukkan hasil-hasil studi laboratorium mengenai kecepatan motor arus searah dengan mikrokontroler berikut rangkaian percobaan, prosedur pengujian, data hasil-hasil pengujian dan penganalisaannya
BAB 5 .Kesimpulan Dan Saran
BAB II
MOTOR ARUS SEARAH II.1. Umum(8,9)
Motor arus searah adalah suatu mesin yang berfungsi mengubah energi listrik menjadi energi mekanik, dimana energi gerak tersebut berupa putaran dari motor.
Ditinjau dari segi sumber arus penguat magnetnya, motor arus searah dapat dibedakan atas :
1. Motor arus searah penguatan terpisah, bila arus penguat medan rotor dan medan stator diperoleh dari luar motor.
2. Motor arus searah penguatan sendiri, bila arus penguat magnet berasal dari motor itu sendiri.
Motor arus searah dapat diklasifikasi sebagai berikut : 1. Motor arus searah penguatan shunt
2. Motor arus searah penguatan seri. 3. Motor arus searah kompon panjang.
• Motor arus searah kompon panjang kumulatif. • Motor arus searah kompon panjang differensial.
4. Motor arus searah kompon pendek
II.2. Kontruksi Motor Arus Searah (8,9)
Secara umum motor arus searah memiliki konstruksi yang sama, terbagi atas dua bagian yaitu bagian yang diam disebut stator dan bagian yang bergerak/berputar disebut rotor. Untuk lebih jelasnya dapat dilihat pada Gambar 2.1.
Gambar 2.1. Konstruksi Motor Arus Searah.
Dari Gambar 2.1 dapat dilihat konstruksi dari motor arus searah. Keterangan Gambar 2.1. sebagai berikut :
1. Badan motor ( rangka ).
Rangka ( frame atau yoke ) mesin arus searah seperti juga mesin-mesin listrik lainnya secara umum memiliki dua fungsi, yaitu :
itu rangka ini juga harus memiliki permeabilitas yang tinggi disamping kuat secara mekanik .
Biasanya pada motor terdapat papan nama ( name plate ) yang bertuliskan spesifikasi umum atau data-data teknik dari mesin, juga terdapat kotak ujung yang merupakan tempat-tempat ujung-ujung belitan penguat medan dan lilitan jangkar. 2. Kutub
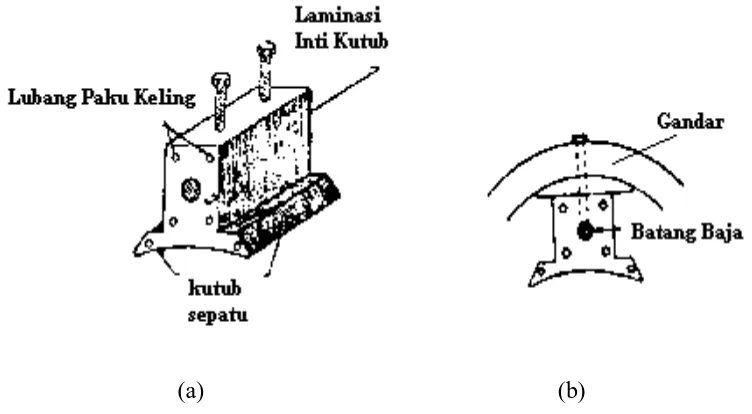
Medan penguat atau magnet medan terdiri atas inti kutub dan sepatu kutub ( Gambar 2.2 ).
(a) (b) Gambar 2.2 Konstruksi Kutub dan Penempatannya.
a. Konstruksi Inti Kutub b. Penempatan Inti Kutub Adapun fungsi dari sepatu kutub adalah :
1. Menyebarkan fluks pada celah udara dan juga karena merupakan bidang lebar maka akan mengurangi reluktansi jalur magnet.
Inti kutub terbuat lembaran-lembaran besi tuang atau baja tuang. Sepatu kutub dilaminasi dan dibaut atau dikeling ( rivet ) ke rangka mesin. Sebagaimana diketahui bahwa fluks magnet yang terdapat pada motor arus searah dihasilkan oleh kutub-kutub magnet buatan dengan prinsip elektromagnetik.
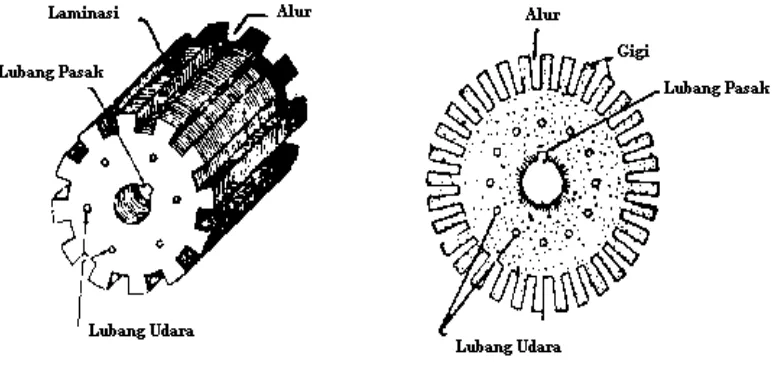
3. Inti jangkar.
Inti jangkar yang umum digunakan dalam motor arus searah adalah berbentuk silinder yang diberi alur-alur pada permukaannya untuk tempat melilitkan kumparan-kumparan tempat terbentuknya ggl induksi. Inti jangkar yang terbuat dari bahan ferromanetik, dengan maksud agar komponen-komponen ( lilitan jangkar ) terletak dalam daerah yang induksi magnetnya besar, supaya ggl induksi dapat bertambah besar. Seperti halnya inti kutub magnet maka jangkar dibuat dari bahan-bahan berlapis-lapis tipis untuk mengurangi panas yang terbentuk karena adanya arus linier ( Gambar 2.3 ).
Gambar 2.3. Inti jangkar yang terlapis-lapis.
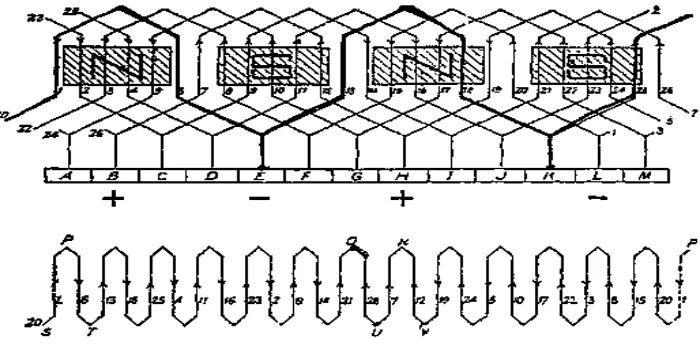
4. Kumparan jangkar
Kumparan jangkar pada motor arus searah berfungsi tempat terbentuknya ggl induksi. kumparan jangkar terdiri dari :
1. Kumparan gelung
Gambar 2.4a. Kumparan gelombang 2. Kumparan gelombang.
Gambar 2.4b. Kumparan Gelombang
5. Kumparan medan
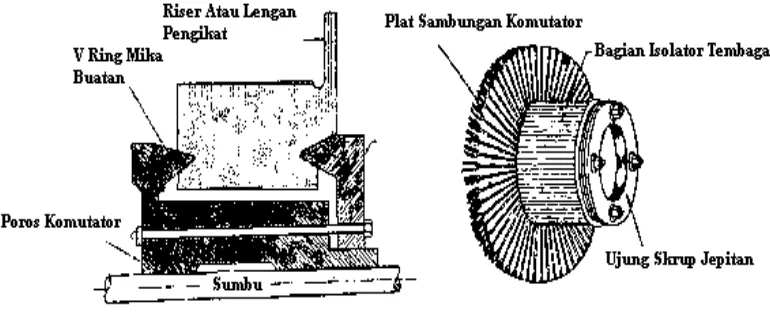
6. Komutator
Fungsi komutator untuk fasilitas penghubung arus dari konduktor jangkar ,sebagai penyearah mekanik, yang bersama-sama dengan sikat membuat sesuatu kerjasama yang disebut komutasi. Agar menghasilkan penyearah yang lebih baik, maka komutator yang digunakan hendaknya dalam jumlah yang besar. Dalam hal ini setiap belahan ( segmen ) komutator tidak lagi merupakan bentuk separoh cincin, tetapi sudah berbentuk lempengan-lempengan ( segmen komutator ) terdapat bahan isolasi ( Gambar 2.5 ) .
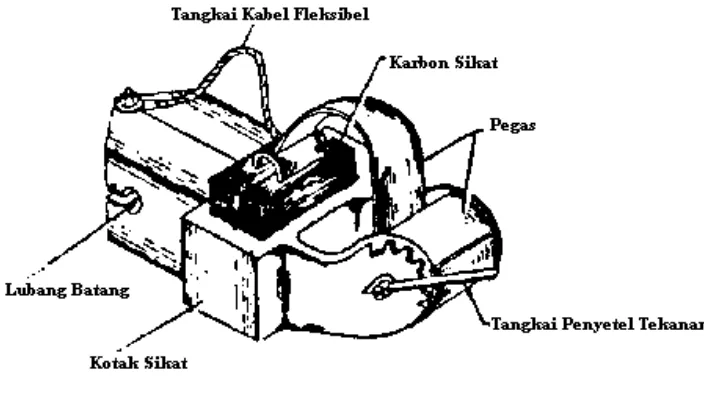
Gambar 2.5 Komutator 7. Sikat-sikat
Gambar 2.6 Sikat-sikat
Disamping itu sikat memegang peranan penting untuk terjadinya komutasi. Karbon yang ada diusahakan memiliki konduktivitas yang tinggi untuk mengurangi rugi-rugi listrik. Agar gesekan antara komutator-komutator dan sikat tidak mengakibatkan ausnya komutator, maka sikat harus lebih lunak daripada komutator.
II.3. Prinsip Kerja Motor Arus Searah (1,3,5,6)
Sebuah konduktor yang dialiri arus mempunyai medan magnet di sekelilingnya. Pada saat konduktor yang dialiri arus listrik ditempatkan pada suatu medan magnet, maka konduktor akan mengalami gaya mekanik, seperti diperlihatkan pada Gambar 2.7.
Pada Gambar 2.7.a menggambarkan sebuah konduktor yang dialiri arus listrik menghasilkan medan magnet disekelilingnya. Arah medan magnet yang dihasilkan oleh konduktor dapat diperoleh dengan menggunakan kaidah tangan kanan.
Kuat medan tergantung pada besarnya arus yang mengalir pada konduktor.
Sedangkan Gambar 2.7.b menunjukkan sebuah medan magnet yang diakibatkan oleh kutub-kutub magnet utara dan selatan. Arah medan magnet adalah dari kutub utara menuju kutub selatan.
Pada saat konduktor dengan arah arus menjauhi pembaca ditempatkan di dalam medan magnet seragam, maka medan gabungannya akan seperti yang ditunjukkan pada Gambar 2.7.c. Daerah di atas konduktor, medan yang ditimbulkan konduktor adalah dari kiri ke kanan, atau pada arah yang sama dengan medan utama. Sementara di bawahnya, garis-garis magnet dari konduktor arahnya berlawanan dengan dengan medan utama. Hasilnya adalah memperkuat medan atau menambah kerapatan fluksi di atas konduktor dan melemahkan medan atau mengurangi kerapatan fluksi di bawah konduktor.
Dalam keadaan ini, fluksi di daerah di atas konduktor yang kerapatannya bertambah akan mengusahakan gaya ke bawah kepada konduktor, untuk mengurangi kerapatannya. Hal ini menyebabkan konduktor mengalami gaya berupa dorongan ke arah bawah. Begitu juga halnya bila arah arus dalam konduktor dibalik. Kerapatan fluksi yang berada di bawah konduktor akan
bertambah sedangkan kerapatan fluksi di atas konduktor berkurang. Sehingga konduktor akan mendapatkan gaya tolak ke arah atas.
Prinsip kerja sebuah motor arus searah dapat dijelaskan dengan gambar berikut ini:
Gambar 2.8. Prinsip perputaran motor dc
Pada saat kumparan medan dihubungkan dengan sumber tegangan, mengalir arus medan If pada kumparan medan karena rangkaian tertutup sehingga
menghasilkan fluksi magnet yang arahnya dari kutub utara menuju kutub selatan. Selanjutnya ketika kumparan jangkar dihubungkan ke sumber tegangan, pada kumparan jangkar mengalir arus jangkar Ia. Arus yang mengalir pada
konduktorkonduktor kumparan jangkar menimbulkan fluksi magnet yang melingkar. Fluksi jangkar ini memotong fluksi dari kedua kutub medan, sehingga menyebabkan perubahan kerapatan fluksi dari medan utama. Hal ini menyebabkan jangkar mengalami gaya sehingga menimbulkan torsi.
Gaya Lorentz adalah gaya yang ditimbulkan oleh muatan listrik yang bergerak atau oleh arus listrik yang berada dalam suatu medan magnet (B). Arah gaya ini akan mengikuti arah maju skrup yang diputar dari vektor arah gerak muatan listrik (v) ke arah medan magnet (B), seperti yang terlihat dalam rumus berikut:
F = q( v x B)
Sebuah partikel bermuatan listrik yang bergerak dalam daerah medan magnet homogen akan mendapatkan gaya. Gaya ini juga dinamakan gaya Lorentz. Gerak partikel akan menyimpang searah dengan gaya lorentz yang mempengaruhi. Arah gaya Lorentz pada muatan yang bergerak dapat juga ditentukan dengan kaidah tangan kanan dari gaya Lorentz (F) akibat dari arus listrik, I dalam suatu medan magnet B. Ibu jari, menunjukan arah gaya Lorentz . Jari telunjuk, menunjukkan arah medan magnet ( B ). Jari tengah, menunjukkan arah arus listrik ( I ). Untuk muatan positif arah gerak searah dengan arah arus, sedang untuk muatan negatif arah gerak berlawanan dengan arah arus.
Besarnya gaya Lorentz (F) dapat ditulis:
F = B.I.ℓ ... (2.1) Jika besar muatan q bergerak dengan kecepatan v, dan I = q/t maka persamaan gaya adalah:
F = I . ℓ . B sin θ = q/t . ℓ . B sin θ = q . ℓ/t. B sin θ = q . v . B sin θ
Sehingga besarnya gaya Lorentz yang dialami oleh sebuah muatan yang bergerak dalam daerah medan magnet dapat dicari dengan menggunakan rumus :
Sedangkan Torsi yang dihasilkan motor dapat ditentukan dengan:
T = F . r ... (2.2)
Bila torsi yang dihasilkan motor lebih besar daripada torsi beban maka motor akan berputar. Besarnya torsi beban dapat dituliskan dengan:
T = K Φ Ia ... (2.3)
a Z P K
. 2
.
π
= ... (2.4)
Dimana :
T = Torsi [ N-m ]
r = Jari-jari rotor [ Meter ]
K = Konstanta ( bergantung pada ukuran fisik motor ) Φ = Fluksi setiap kutub
Ia = Arus jangkar [ Ampere ]
V
t+
-E
aI
aR
aR
fV
fI
f+
-II.4. Jenis-jenis Motor Arus Searah (1,5,8,9) II.4.1 Motor Arus Searah Penguatan Bebas
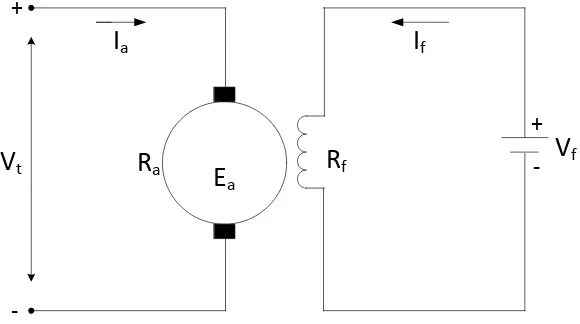
1. Rangkaian ekivalen motor arus searah penguatan bebas Gambar 2.16 Rangkaian ekivalen motor arus searah penguatan bebas
Gambar 2.16 Rangkaian ekivalen motor arus searah penguatan bebas 2. Persamaan umum motor arus searah penguatan bebas
Vt = Ea + Ia.Ra ... (2.17)
Vf = If . Rf ... (2.18)
dimana :
Vt = Tegangan terminal jangkar motor arus searah [ Volt ].
Ia = Arus jangkar [ Amp].
Ra = Tahanan jangkar [ Ohm ].
If = Arus medan penguatan bebas [ Ohm ].
Vf = Tegangan terminal medan penguatan bebas [ Volt ].
Rf = Tahanan medan penguatan bebas [ Ohm ].
V
t+
-E
aI
LI
aI
shR
shR
a+
-II.4.2 Motor Arus Searah Penguatan Shunt
1. Rangkaian ekivalen motor arus searah penguatan shunt
Gambar 2.10 Rangkaian ekivalen motor arus searah penguatan shunt Persamaan umum motor arus searah penguatan shunt
Vt = Ea + Ia.Ra ... (2.19)
Vsh = Vt = Ish . Rsh ... (2.20)
IL = Ia + Ish………(2.21)
dimana :
Ish = Arus kumparan medan shunt [ Ohm ].
Vsh = Tegangan terminal medan motor arus searah [ Volt ].
Rsh = Tahanan medan shunt [ Ohm ].
I
a+
-R
sI
LE
aV
t+
II.4.3 Motor Arus Searah Penguatan Seri
1. Rangkaian ekivalen motor arus searah penguatan seri
Gambar 2.18 Rangkaian ekivalen motor arus searah penguatan seri 2. Persamaan umum motor arus searah seri.
Vt = Ea + Ia (Ra + Rs)………...(2.22)
Ia = (
Rs Ra
Ea Vt
+
− ) ………..……….(2.23)
Ia = IL ……….(2.24)
dimana :
Is = Arus kumparan medan seri [ Amp ].
II.4.4 Motor Arus Searah Penguatan Kompon
Gambar 2.19 Rangkaian ekivalen motor arus searah penguatan kompon (a) Rangkaian ekivalen motor arus searah kompon panjang lawan. (b) Rangkaian ekivalen motor arus searah kompon panjang Bantu. Vt = Ea + Ia.(Rs+ Ra)………...(2.25)
Vt = Ish . Rs………..………..………..(2.26)
IL = Ish + Ia………..………...………….(2.27)
Gambar 2.20 (a) Rangkaian ekivalen motor arus searah kompon pendek lawan (b) Rangkaian ekivalen motor arus searah kompon pendek Bantu. Vt = Ea + IL . Rsh + Ia . Ra………....….(2.28)
Vt = Ish . Rsh………..………..(2.29)
BAB I PENDAHULUAN I.1. Umum
Pada motor arus searah (DC) energi listrik dirubah menjadi energi mekanik. Dalam dunia industri motor arus searah banyak digunakan sebagai motor penggerak. Pemilihan motor arus searah sebagai motor penggerak dibandingkan motor induksi maupun motor sinkron karena motor arus searah memiliki rentang pengaturan kecepatan yang lebar ataupun pengaturan yang teliti pada keluaran rotornya. Pengaturan kecepatan motor arus searah juga sangat mudah dilakukan dalam berbagai kecepatan dan beban variasi,
rangkaian jangkar pada motor-motor seri. Cara yang paling umum dilakukan adalah mengatur tegangan terminal jangkar (armature terminal voltage control), yaitu dengan mengubah-ubah besar tegangan yang diberikan pada terminal jangkar untuk menghasilkan putaran yang diinginkan dengan menggunakan sistem PWM untuk mengubah frekuensi sumber tegangan dimana mempunyai kelebihan yaitu mampu menggerakkan motor arus searah dengan putaran halus dan rentang yang lebar dan menghasilkan kendali kecepatan lebih baik dari metode lainnya
I.2. Tujuan Penulisan
Mengimplementasikan rancangan pembangkit sinyal PWM dengan menggunakan mikrokontroler AT8535 untuk sistem kendali kecepatan motor DC.
I.3 Batasan Masalah
1. Perancangan perangkat keras untuk sistem minimum mikrokontroler AT8535
2. Sensor penghitung kecepatan motor adalah optocoupler
3. Perancangan pembangkit sinyal PWM yang diimpelementasikan dengan mikrokontroler sebagai teknik pengubah tegangan untuk mengendalikan kecepatan motor DC.
I.4 Metode Penulisan
Dalam pengerjaan penelitian ini, diperlukan langkah-langkah yang baik untuk mendapatkan hasil yang maksimal. Untuk itu penulis telah merencanakan langkah – langkah yang akan dilakukan, yaitu sebagai berikut:
2. Perancangan perangkat keras.
3. Perancangan sistem pengaturan dan program mikrokontroler.
4. Pengujian
I.5. Sistematika Penulisan.
Untuk mempermudah pembahasan dan pemahaman, maka penulis membuat sistematika penulisan Tugas Akhir ini sebagai berikut:
BAB 1.Pendahuluan
Meliputi latar belakang masalah, rumusan masalah, tujuan penulisan, batasan masalah, manfaat penulisan, metodologi penulisan dan sistematika penulisan.
BAB 2.Landasan Teori
Dalam bab ini akan dijelaskan tentang motor arus searah secara teoritis , jenis- jenis motor arus searah.
BAB 3 .Jenis-jenis Pengendalian Motor Arus Searah
Dalam Bab ini meliputi tentang tinjauan mengenai jenis-jenis pengontorolan kecepatan motor arus searah .
BAB 4.Pengaturan Kecepatan Motor Arus Searah dengan Mikrokontroler
Bab ini akan menunjukkan hasil-hasil studi laboratorium mengenai kecepatan motor arus searah dengan mikrokontroler berikut rangkaian percobaan, prosedur pengujian, data hasil-hasil pengujian dan penganalisaannya
BAB 5 .Kesimpulan Dan Saran
BAB II
MOTOR ARUS SEARAH II.1. Umum(8,9)
Motor arus searah adalah suatu mesin yang berfungsi mengubah energi listrik menjadi energi mekanik, dimana energi gerak tersebut berupa putaran dari motor.
Ditinjau dari segi sumber arus penguat magnetnya, motor arus searah dapat dibedakan atas :
1. Motor arus searah penguatan terpisah, bila arus penguat medan rotor dan medan stator diperoleh dari luar motor.
2. Motor arus searah penguatan sendiri, bila arus penguat magnet berasal dari motor itu sendiri.
Motor arus searah dapat diklasifikasi sebagai berikut : 1. Motor arus searah penguatan shunt
2. Motor arus searah penguatan seri. 3. Motor arus searah kompon panjang.
• Motor arus searah kompon panjang kumulatif. • Motor arus searah kompon panjang differensial.
4. Motor arus searah kompon pendek
II.2. Kontruksi Motor Arus Searah (8,9)
Secara umum motor arus searah memiliki konstruksi yang sama, terbagi atas dua bagian yaitu bagian yang diam disebut stator dan bagian yang bergerak/berputar disebut rotor. Untuk lebih jelasnya dapat dilihat pada Gambar 2.1.
Gambar 2.1. Konstruksi Motor Arus Searah.
Dari Gambar 2.1 dapat dilihat konstruksi dari motor arus searah. Keterangan Gambar 2.1. sebagai berikut :
1. Badan motor ( rangka ).
Rangka ( frame atau yoke ) mesin arus searah seperti juga mesin-mesin listrik lainnya secara umum memiliki dua fungsi, yaitu :
itu rangka ini juga harus memiliki permeabilitas yang tinggi disamping kuat secara mekanik .
Biasanya pada motor terdapat papan nama ( name plate ) yang bertuliskan spesifikasi umum atau data-data teknik dari mesin, juga terdapat kotak ujung yang merupakan tempat-tempat ujung-ujung belitan penguat medan dan lilitan jangkar. 2. Kutub
Medan penguat atau magnet medan terdiri atas inti kutub dan sepatu kutub ( Gambar 2.2 ).
[image:31.595.124.500.309.516.2](a) (b) Gambar 2.2 Konstruksi Kutub dan Penempatannya.
a. Konstruksi Inti Kutub b. Penempatan Inti Kutub Adapun fungsi dari sepatu kutub adalah :
1. Menyebarkan fluks pada celah udara dan juga karena merupakan bidang lebar maka akan mengurangi reluktansi jalur magnet.
Inti kutub terbuat lembaran-lembaran besi tuang atau baja tuang. Sepatu kutub dilaminasi dan dibaut atau dikeling ( rivet ) ke rangka mesin. Sebagaimana diketahui bahwa fluks magnet yang terdapat pada motor arus searah dihasilkan oleh kutub-kutub magnet buatan dengan prinsip elektromagnetik.
3. Inti jangkar.
[image:32.595.125.513.457.641.2]Inti jangkar yang umum digunakan dalam motor arus searah adalah berbentuk silinder yang diberi alur-alur pada permukaannya untuk tempat melilitkan kumparan-kumparan tempat terbentuknya ggl induksi. Inti jangkar yang terbuat dari bahan ferromanetik, dengan maksud agar komponen-komponen ( lilitan jangkar ) terletak dalam daerah yang induksi magnetnya besar, supaya ggl induksi dapat bertambah besar. Seperti halnya inti kutub magnet maka jangkar dibuat dari bahan-bahan berlapis-lapis tipis untuk mengurangi panas yang terbentuk karena adanya arus linier ( Gambar 2.3 ).
Gambar 2.3. Inti jangkar yang terlapis-lapis.
4. Kumparan jangkar
Kumparan jangkar pada motor arus searah berfungsi tempat terbentuknya ggl induksi. kumparan jangkar terdiri dari :
[image:33.595.139.505.202.373.2]1. Kumparan gelung
Gambar 2.4a. Kumparan gelombang 2. Kumparan gelombang.
Gambar 2.4b. Kumparan Gelombang
5. Kumparan medan
[image:33.595.153.503.446.619.2]6. Komutator
[image:34.595.132.517.310.475.2]Fungsi komutator untuk fasilitas penghubung arus dari konduktor jangkar ,sebagai penyearah mekanik, yang bersama-sama dengan sikat membuat sesuatu kerjasama yang disebut komutasi. Agar menghasilkan penyearah yang lebih baik, maka komutator yang digunakan hendaknya dalam jumlah yang besar. Dalam hal ini setiap belahan ( segmen ) komutator tidak lagi merupakan bentuk separoh cincin, tetapi sudah berbentuk lempengan-lempengan ( segmen komutator ) terdapat bahan isolasi ( Gambar 2.5 ) .
Gambar 2.5 Komutator 7. Sikat-sikat
Gambar 2.6 Sikat-sikat
Disamping itu sikat memegang peranan penting untuk terjadinya komutasi. Karbon yang ada diusahakan memiliki konduktivitas yang tinggi untuk mengurangi rugi-rugi listrik. Agar gesekan antara komutator-komutator dan sikat tidak mengakibatkan ausnya komutator, maka sikat harus lebih lunak daripada komutator.
II.3. Prinsip Kerja Motor Arus Searah (1,3,5,6)
Sebuah konduktor yang dialiri arus mempunyai medan magnet di sekelilingnya. Pada saat konduktor yang dialiri arus listrik ditempatkan pada suatu medan magnet, maka konduktor akan mengalami gaya mekanik, seperti diperlihatkan pada Gambar 2.7.
[image:35.595.141.493.622.725.2]Pada Gambar 2.7.a menggambarkan sebuah konduktor yang dialiri arus listrik menghasilkan medan magnet disekelilingnya. Arah medan magnet yang dihasilkan oleh konduktor dapat diperoleh dengan menggunakan kaidah tangan kanan.
Kuat medan tergantung pada besarnya arus yang mengalir pada konduktor.
Sedangkan Gambar 2.7.b menunjukkan sebuah medan magnet yang diakibatkan oleh kutub-kutub magnet utara dan selatan. Arah medan magnet adalah dari kutub utara menuju kutub selatan.
Pada saat konduktor dengan arah arus menjauhi pembaca ditempatkan di dalam medan magnet seragam, maka medan gabungannya akan seperti yang ditunjukkan pada Gambar 2.7.c. Daerah di atas konduktor, medan yang ditimbulkan konduktor adalah dari kiri ke kanan, atau pada arah yang sama dengan medan utama. Sementara di bawahnya, garis-garis magnet dari konduktor arahnya berlawanan dengan dengan medan utama. Hasilnya adalah memperkuat medan atau menambah kerapatan fluksi di atas konduktor dan melemahkan medan atau mengurangi kerapatan fluksi di bawah konduktor.
Dalam keadaan ini, fluksi di daerah di atas konduktor yang kerapatannya bertambah akan mengusahakan gaya ke bawah kepada konduktor, untuk mengurangi kerapatannya. Hal ini menyebabkan konduktor mengalami gaya berupa dorongan ke arah bawah. Begitu juga halnya bila arah arus dalam konduktor dibalik. Kerapatan fluksi yang berada di bawah konduktor akan
bertambah sedangkan kerapatan fluksi di atas konduktor berkurang. Sehingga konduktor akan mendapatkan gaya tolak ke arah atas.
Prinsip kerja sebuah motor arus searah dapat dijelaskan dengan gambar berikut ini:
Gambar 2.8. Prinsip perputaran motor dc
Pada saat kumparan medan dihubungkan dengan sumber tegangan, mengalir arus medan If pada kumparan medan karena rangkaian tertutup sehingga
menghasilkan fluksi magnet yang arahnya dari kutub utara menuju kutub selatan. Selanjutnya ketika kumparan jangkar dihubungkan ke sumber tegangan, pada kumparan jangkar mengalir arus jangkar Ia. Arus yang mengalir pada
konduktorkonduktor kumparan jangkar menimbulkan fluksi magnet yang melingkar. Fluksi jangkar ini memotong fluksi dari kedua kutub medan, sehingga menyebabkan perubahan kerapatan fluksi dari medan utama. Hal ini menyebabkan jangkar mengalami gaya sehingga menimbulkan torsi.
Gaya Lorentz adalah gaya yang ditimbulkan oleh muatan listrik yang bergerak atau oleh arus listrik yang berada dalam suatu medan magnet (B). Arah gaya ini akan mengikuti arah maju skrup yang diputar dari vektor arah gerak muatan listrik (v) ke arah medan magnet (B), seperti yang terlihat dalam rumus berikut:
F = q( v x B)
Sebuah partikel bermuatan listrik yang bergerak dalam daerah medan magnet homogen akan mendapatkan gaya. Gaya ini juga dinamakan gaya Lorentz. Gerak partikel akan menyimpang searah dengan gaya lorentz yang mempengaruhi. Arah gaya Lorentz pada muatan yang bergerak dapat juga ditentukan dengan kaidah tangan kanan dari gaya Lorentz (F) akibat dari arus listrik, I dalam suatu medan magnet B. Ibu jari, menunjukan arah gaya Lorentz . Jari telunjuk, menunjukkan arah medan magnet ( B ). Jari tengah, menunjukkan arah arus listrik ( I ). Untuk muatan positif arah gerak searah dengan arah arus, sedang untuk muatan negatif arah gerak berlawanan dengan arah arus.
Besarnya gaya Lorentz (F) dapat ditulis:
F = B.I.ℓ ... (2.1) Jika besar muatan q bergerak dengan kecepatan v, dan I = q/t maka persamaan gaya adalah:
F = I . ℓ . B sin θ = q/t . ℓ . B sin θ = q . ℓ/t. B sin θ = q . v . B sin θ
Sehingga besarnya gaya Lorentz yang dialami oleh sebuah muatan yang bergerak dalam daerah medan magnet dapat dicari dengan menggunakan rumus :
Sedangkan Torsi yang dihasilkan motor dapat ditentukan dengan:
T = F . r ... (2.2)
Bila torsi yang dihasilkan motor lebih besar daripada torsi beban maka motor akan berputar. Besarnya torsi beban dapat dituliskan dengan:
T = K Φ Ia ... (2.3)
a Z P K
. 2
.
π
= ... (2.4)
Dimana :
T = Torsi [ N-m ]
r = Jari-jari rotor [ Meter ]
K = Konstanta ( bergantung pada ukuran fisik motor ) Φ = Fluksi setiap kutub
Ia = Arus jangkar [ Ampere ]
V
t+
-E
aI
aR
aR
fV
fI
f+
-II.4. Jenis-jenis Motor Arus Searah (1,5,8,9) II.4.1 Motor Arus Searah Penguatan Bebas
[image:40.595.182.472.208.370.2]1. Rangkaian ekivalen motor arus searah penguatan bebas Gambar 2.16 Rangkaian ekivalen motor arus searah penguatan bebas
Gambar 2.16 Rangkaian ekivalen motor arus searah penguatan bebas 2. Persamaan umum motor arus searah penguatan bebas
Vt = Ea + Ia.Ra ... (2.17)
Vf = If . Rf ... (2.18)
dimana :
Vt = Tegangan terminal jangkar motor arus searah [ Volt ].
Ia = Arus jangkar [ Amp].
Ra = Tahanan jangkar [ Ohm ].
If = Arus medan penguatan bebas [ Ohm ].
Vf = Tegangan terminal medan penguatan bebas [ Volt ].
Rf = Tahanan medan penguatan bebas [ Ohm ].
V
t+
-E
aI
LI
aI
shR
shR
a+
-II.4.2 Motor Arus Searah Penguatan Shunt
1. Rangkaian ekivalen motor arus searah penguatan shunt
Gambar 2.10 Rangkaian ekivalen motor arus searah penguatan shunt Persamaan umum motor arus searah penguatan shunt
Vt = Ea + Ia.Ra ... (2.19)
Vsh = Vt = Ish . Rsh ... (2.20)
IL = Ia + Ish………(2.21)
dimana :
Ish = Arus kumparan medan shunt [ Ohm ].
Vsh = Tegangan terminal medan motor arus searah [ Volt ].
Rsh = Tahanan medan shunt [ Ohm ].
I
a+
-R
sI
LE
aV
t+
II.4.3 Motor Arus Searah Penguatan Seri
1. Rangkaian ekivalen motor arus searah penguatan seri
Gambar 2.18 Rangkaian ekivalen motor arus searah penguatan seri 2. Persamaan umum motor arus searah seri.
Vt = Ea + Ia (Ra + Rs)………...(2.22)
Ia = (
Rs Ra
Ea Vt
+
− ) ………..……….(2.23)
Ia = IL ……….(2.24)
dimana :
Is = Arus kumparan medan seri [ Amp ].
II.4.4 Motor Arus Searah Penguatan Kompon
Gambar 2.19 Rangkaian ekivalen motor arus searah penguatan kompon (a) Rangkaian ekivalen motor arus searah kompon panjang lawan. (b) Rangkaian ekivalen motor arus searah kompon panjang Bantu. Vt = Ea + Ia.(Rs+ Ra)………...(2.25)
Vt = Ish . Rs………..………..………..(2.26)
IL = Ish + Ia………..………...………….(2.27)
Gambar 2.20 (a) Rangkaian ekivalen motor arus searah kompon pendek lawan (b) Rangkaian ekivalen motor arus searah kompon pendek Bantu. Vt = Ea + IL . Rsh + Ia . Ra………....….(2.28)
Vt = Ish . Rsh………..………..(2.29)
BAB III
JENIS-JENIS PENGATURAN KECEPATAN MOTOR DC
III.1. Umum(2,3)
Motor DC pada saat sekarang ini banyak digunakan untuk aplikasi yang membutuhkan pengaturan kecepatan, sesuai dengan fakta bahwa keecpatan motor DC dapat divariasikan melalui berbagai metode. Sumber DC yang didalam aplikasinya banyak juga yang mengantikan dioda dengan thyristor yang digunakan dalam berbagai kombinasi kontrol kecepatan melalui penyesuaian tegangan ke motor.
Pengaturan Kecepatan motor DC dapat dilakukan melalui 3 cara, yaitu : 1. Pengaturan medan.
2. Pengaturan tegangan. 3. Pengaturan tahanan jangkar. III.2. Pengaturan Medan(2,3)
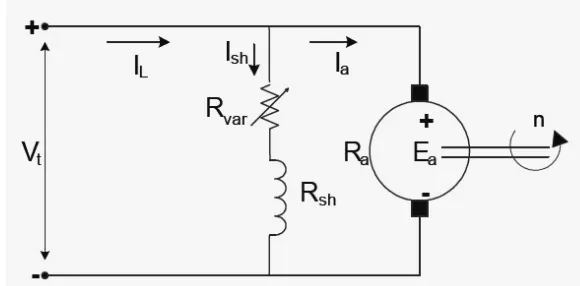
[image:44.595.172.462.588.731.2]Pengaturan ini dapat dilakukan dengan mengatur arus dalam kumparan medan yang dikontrol langsung dengan menghubungkan sebuah resistor variable secara seri dengan kumparan dengan cara melemahkan dan menaikkan melalui pengaturan tahanan variabel seperti pada Gambar 3.1.
Berdasarkan Persamaan 2.19 dan 2.20 didapatkan : Vt = Ea + Ia.Ra
Ea = Vt - Ia.Ra
Ea = c . n Φsh...(3.1)
Sehingga didapatkan berdasarkan subsitusi Persamaan 2.20 dan 3.1 :
n =
sh a a t c R I V φ . − ... (3.2)
Φsh ≈ Ish
dimana :
n = Putaran kecepatan motor [ rpm ]. Vt = Tegangan terminal [ Volt ].
Ia = Arus jangkar [ Ampere ].
c = Konstanta. ) 120 44 , 4
( Np
φsh = Fluks medan shunt [ Wb ]
Ish = Arus shunt [ Ampere ]
Berdasarkan Persamaan 2.20 : Vsh = Vt = Ish . Rsh
sehingga :
Ish =
iabel sh t R R V var + ...(3.3) Dimana :
Ish = Arus medan shunt [ Ampere ].
Rsh = Tahanan shunt [ Ohm ].
Vt = Tegangan terminal [ Volt ].
III. 3. Pengaturan Tegangan(2,3,7)
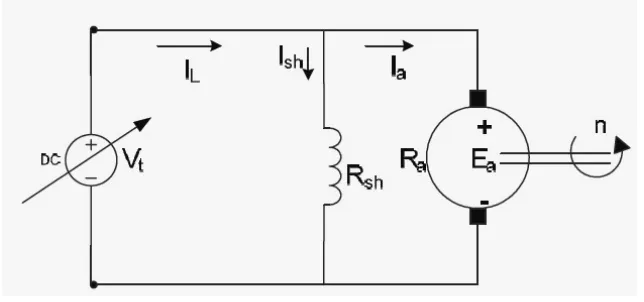
[image:46.595.159.481.195.346.2]Pengaturan ini dilakukan dengan mengatur tegangan yang disuplai ke motor seperti Gambar 3.2.
Gambar 3.2. Pengaturan tegangan pada motor DC penguatan shunt. Berdasarkan Persamaan 2.19, 2.20 dan 3.1 didapatkan :
Vt = Ea + Ia.Ra
Ea = Vt – Ia.Ra.
Ea= c. n Φsh
n =
sh a a t
c R I V
φ
.
− ...(3.4)
dimana :
n = Putaran kecepatan motor [ rpm ]. Vt = Tegangan terminal [ Volt ].
Ia = Arus jangkar [ Ampere ].
c = Konstanta.
Φsh = Fluks medan shunt [ Wb ]
Motor DC pada saat sekarang ini diberi sumber AC yang lalu disearahkan dengan dioda dan bila dibandingkan langsung dengan sumber DC yang didalam aplikasinya banyak juga yang mengantikan dioda dengan thyristor yang digunakan dalam berbagai kombinasi kontrol kecepatan melalui penyesuaian tegangan ke motor.
Berdasarkan pengaturan tegangan mengunakan thyristor terbagi atas 3 bagian sebagai berikut:
a. Kontrol phasa.
Dimana sumber AC dipotong gelombang negatifnya sehingga yang terhubung ke motor adalah gelombang positifnya dan pengontrolan ini dapat digunakan untuk semua daya motor.
b. Integral siklus kontrol
Dengan memotong gelombang AC sehingga merubah nilai tegangan AC atau disebut juga AC Kontroler, yang dihubungkan dengan jembatan dioda. Metode ini hanya bermanfaat untuk ukuran motor mempunyai daya yang kecil.
c. Kontrol chopper.
Proses dan pengendalian metode ini mengambil daya dari sumber tegangan DC. Kontrol kecepatannya menggunakan sumber tegangan DC yang divariasikan sebagai input.
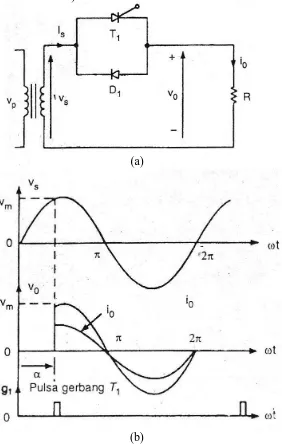
III.3.1. Kontrol Fasa(7)
Prinsip dari kontrol fasa dapat dijelaskan berdasarkan pada Gambar 3.3a. Energi mengalir ke beban dikontrol dengan menunda sudut tembak thyristor T1.
Gambar 3.3b mengilustrasikan pulsa-pulsa gerbang thyristor T1 dan bentuk
gelombang tegangan masukan dan keluaran. Dengan adanya diode D1, daerah
bervariasi antara 70.7 dan 100%. Tegangan keluaran dan arus masuk tidak simetris dan mengandung komponen DC. Rangkaian ini adalah pengontrolan setengah gelombang satu fasa dan cocok hanya untuk beban resistif berdaya rendah, seperti pemanasan dan pencahayaan. Karena aliran daya dikontrol oleh setengah gelombang positif tegangan masukan, jenis pengontrol tipe ini disebut juga dengan Pengontrol banyak arah (uninderectional).
(a)
[image:48.595.182.464.234.678.2](b)
Gambar 3.3 Kontrol Sudut Satu Fasa (a).Rangkaian
Jika vs = Vm sin ωt = 2 Vssin ωt adalah tegangan masukan dan sudut tunda
thyristor T1adalah ωt = α, tegangan keluaran rms ditentukan melalui :
[
]
2 / 1 2 / 1 2 2 2 / 1 2 2 2 2 2 0 2 2 sin 2 2 1 ) ( ) 2 cos 1 ( ) ( ) 2 cos 1 ( 4 2 ) ( sin 2 ) ( sin 2 1 − + = ∫ − +∫ − = ∫ +∫ = α α π π ω ω ω ω π ω ω ω ω π π π π α π π π s s s s o V t d t t d t V t d t V t d t V VNilai tegangan keluaran rata-rata adalah
) 1 (cos 2 2 ) ( sin 2 ) ( sin 2 2 1 2 − = ∫ +∫ − = α π ω ω ω ω π πα ππ s s s dc V t d t V d d t V V
Jika α bervariasi dari 0 sampai π, Vo bervariasi dari Vs ke Vs / 2 dan Vdc bervariasi
dari 0 sampai - 2 Vs/π .
III.3. 2. Integral Siklus Kontrol (ON-OFF)(7)
Prinsip dari kontrol on-off dapat dijelaskan dengan sebuah pengontrol gelombang penuh satu fasa seperti yang ditunjukkan pada gambar 3.4a. Saklar thyristor menghubungkan sumber ac dengan beban untuk waktu tn ; saklar ditutup
dengan sebuah gerbang penghambat pulsa untuk waktu t0. Waktu on, tn, biasanya
terdiri dari sejumlah integral siklus. Thyristor akan on pada tegangan nol melalui tegangan masukan ac. Pulsa-pulsa gerbang untuk tyhristor T1 dan T2 dan bentuk
gelombang untuk masukan dan keluaran ditunjukkan pada gambar 3.4b.
kontrol kecepatan motor. Karena tegangan nol dan arus nol, harmonik yang ditimbulkan oleh saklar dikurangi.
(a)
(c)
[image:50.595.123.521.133.676.2](b)
Gambar 3.4 Gambar Kontrol ON-OFF (a). Rangkaian
Untuk sebuah tegangan masukan sinusoidal, vs = Vmsin ωt 2 Vs sin Vs
ωt. Jika tegangan masukan dihubungkan pada beban untuk siklus n dan diputus untuk
siklus m, tegangan keluaran rms (atau beban) dapat ditemukan melalui
V0 =
2 / 1 0 2 ) ( ) sin . 2 ( ) ( +
∫
π ω ωπ n m V t d t n
V0 = V
m n
n
+ = V k ...(3.5)
Dengan k = n / (m+n) dan k disebut duty cycle. Vs adalah tegangan fasa rms.
Konfigurasi rangkaian untuk control on-off mirip dengan yang ada pada kontrol fasa dan demikian pula dengan analisi kinerjanya.
III.3.3. Kontrol Chopper.(7)
yang dihasilkan lebih tinggi dari tegangan masukan, dan penurunan tegangan dimana tegangan keluaran lebih rendah dari tegangan masukan.
DC Chopper mempunyai 2 prinsip kerja, yaitu : a. Prinsip Kerja Step-Down
Prinsip kerja step down dapat dijelaskan melalui Gambar . Ketika saklar SW ditutup selama waktu t1, tegangan masukan Vs muncul melalui beban. Bila saklar
tetap off selama waktu t2, tegangan melalui beban adalah nol. Bentuk gelombang
untuk tegangan keluaran dan arus beban juga menunjukkan pada Gambar 3.5
(a)
[image:52.595.232.410.314.688.2](b)
Gambar 3.5 Chopper step-down dengan beban resistif (a).rangkaian
Tegangan keluaran rata-rata diberikan oleh :
V0 = s s s s
t kV V ft V T dt V T
t
= ==
∫
1 1 1 0 1 ...(3.6)dan arus beban rata-rata, Ia = Va / R = k Vs/R, dengan T adalah periode chopping, k =
t1/T adalah duty cycle chopper, dan f adalah frekuensi chopping. Nilai rms tegangan
keluaran ditentukan dari :
Vo =
2 / 1 0 2 1
∫
kT o dt VT = kVs...(3.7)
Dengan mengasumsikan bahwa tidak ada rugi-rugi pada chopper maka daya masukan pada chopper sama dengan daya yang diberikan dengan,
Pi =
R V k dt R V T idt v T s kT o kT o 2 0 2 0 1 1 = =
∫
∫
...(3.8)Resistansi masukan efektif yang dilihat dari sumber adalah ;
Ri =
k R R kV V I V s s a
s = =
/ ...(3.9) Duty cycle k dapat divariasikan dari 0 sampai 1 dengan bervariasi menurut t1, T dan
f.
Maka tegangan keluran V0 dapat divariasikan dari 0 sampai Vs dengan mengatur k,
dan aliran daya dapat diatur melalui : 1. Operasi pada frekuensi konstan.
Frekuensi chopping f ( atau periode chopping T ) dijaga tetap dan waktu on t1
2. Operasi pada frekuensi yang variabel
Frekuensi chopping f bervariasi. Pada waktu on t1 atau pada waktu off t2 dijaga tetap.
Ini disebut modulasi frekuensi. Frekuensi divariasikan untuk batasan yang lebar untuk mendapatkan batasan tegangan keluaran yang penuh. Kontrol jenis ini membangkitkan harmonisa pada frekuensi yang tidak bisa ditentukan sehingga akan sangat sulit untuk merancang filter.
b. Prinsip Kerja Step-Up
Chopper dapat digunakan untuk menaikkan tegangan dc. Susunan kerja untuk operasi step-up ditunjukkan pada Gambar 3.6a. Bila saklar SW ditutup selama waktu t1, arus induktor menjadi naik dan energi akan disimpan pada induktor L. Bila saklar
dibuka selama waktu t2, energi yang tersimpan pada induktor akan dipindahkan ke
beban melalui diode D1 dan arus induktor menjadi jatuh. Dengan asumsi bahwa arus
yang mengalir adalah tetap,bentuk gelombang untuk induktor ditunjukkan pada Gambar 3.6b
Bila chopper di-on-kan , tegangan yang melalui induktor adalah;
VL = L
dt di
0
I
t
1t
2I
1I
2
I
1I
2(b)
[image:55.595.187.481.79.533.2](c)
Gambar 3.6 Susunan Kerja Untuk Operasi Step-Up. (a).Susunan Step-Up
(b). Bentuk gelombang arus (c).Tegangan Keluaran
dan ini memberikan arus ripple puncak ke puncak pada induktor,
ΔI = t1
Tegangan keluaran instantaneous adalah
V0 = Vs + L
k V t t V t I s s − = + = ∆ 1 1 1 2 1 2 ...(3.10)
Bila sebuah kapasitor CL dihubungkan dengan beban seperti terlihat pada garis putus-putus pada Gambar. Tegangan keluaran akan tetap dan V0 akan menjadi
nilai rata-rata Va. Bila kita perhatikan dari Persamaan ( 3.10 ) bahwa tegangan yang
melalui beban dapat dinaikkan dengan memvariasikan duty cycle, k dan tegangan keluaran minimum adalah Vs bila k = 0. Namun demikian, chopper tidak dapat on
terus-menerus sehingga k =1. Untuk nilai k yang cenderung menuju satu, tegangan keluaran menjadi sangat besar dan sangat sensitif untuk mengubah nilai k, seperti terlihat pada Gambar 3.6c.
Prinsip ini dapat diaplikasikan untuk memindahkan energi dari satu sumber tegangan ke lainnya seperti terlihat pada Gambar 3.7a. Rangkaian ekivalen untuk mode-mode operasi ditunjukkan pada Gambar.3.7.b dan bentuk gelombang arus ditunjukkan pada gambar 3.7c. Arus induktor untuk mode I diberikan sebagai berikut.
Vs = L
dt di1
Mode 1
V
s+
-V
sI
2+
-Mode 2
+
-(a)(b)
[image:57.595.187.479.88.682.2](c)
dan dinyatakan sebagai
i1 (t) = t I1 L Vs
+
Dimana il adalah arus mula untuk mode 1. Selama mode 1, arus harus meningkat dan
kondisi yang penting adalah,
0 11
>
dt d
untuk Vs > 0
Arus untuk mode 2 diberikan sebagai berikut,
Vs = L E
dt d
+ 2 1
dan penyelesaiannya adalah ;
i2(t) = t I2 L
E Vs
+ −
dengan I2 adalah arus mula untuk mode 2. Untuk sistem yang stabil, arus harus turun
dan kondisi yang memenuhi adalah;
0 12 <
dt d
dan Vs < E
Bila kondisi ini tidak memenuhi,arus induktor akan tetap naik dan akan terjadi tidak stabil. Maka, kondisi untuk pemindahan daya yang terkontrol adalah :
0 < Vs <E
Persamaan (3.15) menyatakan bahwa sumber tegangan Vs, harus lebih kecil dari
Bila chopper di-on-kan, energi akan dipindahkan dari sumber Vs ke inductor L. Dan
bila chopper di-off-kan sejumlah energi yang tersimpan pada induktor akan dipindahkan ke baterai E.
III. 4. Pengaturan Tahanan Jangkar
[image:59.595.201.452.253.373.2]Pengaturan ini dapat dilakukan dengan mengatur sebuah resistor variabel yang dihubungkan secara seri dengan jangkar seperti pada gambar dibawah ini
Gambar 3.8. Pengaturan tahanan jangkar pada motor DC penguatan shunt Berdasarkan Persamaan 3.2 didapatkan :
n = sh a a t c R I V φ . . − n = sh a a a t c R R R I V φ . ) (
. + var −
dimana :
n = Putaran kecepatan motor [ rpm ]. Vt = Tegangan terminal [ Volt ].
Ia = Arus jangkar [ Ampere ].
c = Konstanta.
φsh = Fluks medan shunt [ Wb ]
BAB IV
PENGATURAN KECEPATAN MOTOR DC DENGAN MENGGUNAKAN MIKROKONTROLER
IV.1 Pengaturan Kecepatan Motor DC Dengan Menggunakan Mikrokontroler
Dalam mengatur kecepatan putaran dari motor DC dapat digunakan teknik Pulse Width Modulation (PWM) untuk mengatur catu daya yang diberikan ke motor
dalam domain waktu. Konverter DC-DC atau DC chopper berfungsi untuk mengkonversi tegangan masukan searah konstan menjadi tegangan keluaran searah yang dapat divariasikan berdasarkan perubahan duty cycle rangkaian kontrol chopper nya. Pengaturan tersebut didapat dari rangkaian pengaturan kecepatan Motor DC yang berbasis miktrokontroler Atmega8535 dan menggunakan metoda DC chopper tanpa filter melalui rangkaian kontrol PWM
[image:60.595.190.444.431.692.2].
Komponen switching yang digunakan berupa MOSFET. DC Chopper yang digunakan pada pengujian ini adalah Buck converter. .Konverter jenis ini akan menghasilkan tegangan output yang lebih rendah atau maksimal sama dengan tegangan input. Keuntungan converter jenis ini adalah memiliki efisiensi yang tinggi dan rangkaiannya pun relatif sederhana.
IV.2 Perangkat Keras
Dari sisi perangkat keras, alat yang dibuat terdiri dari 6 bagian besar, yaitu : 1. Catu daya
2. Keypad
3. Mikrokontroler 4. Driver Motor DC 5. Motor DC
6. LCD karakter 2x16 7. Alat pada Laboratorium
Mikrokontroler
Keypad Driver Motor DC Motor DC
LCD Karakter 2x16
[image:61.595.113.523.493.632.2]Catu Daya
Gambar 4.2. Blok Rancangan Diagram Sistem yang Digunakan
pulsa-pulsa yang dikeluarkan yang nantinya akan diumpankan ke driver motor DC untuk menentukan gerakan dari motor DC. Output dari mikrokontroler tidak dapat secara langsung digunakan untuk menggerakkan motor DC. Untuk itu, dibuatlah sebuah rangkaian Drvier motor DC yang berfungsi sebagai penghubung antara mikrokontroler dengan motor DC tadi. LCD karakter 2x16 mempunyai peranan dalam menampilkan data input dan output dalam bentuk karakter.
1. Rangkaian Catu Daya
[image:62.595.138.489.331.506.2]Rangkaian skematik power supply dapat dilihat pada gambar di bawah ini:
Gambar 4.3 Rangkaian Skematik Power Supply
Rangkaian power supply berfungsi untuk mensupplay arus dan tegangan ke seluruh rangkaian yang ada. Rangkaian power supply ini terdiri dari dua keluaran, yaitu 5 volt dan 12 volt, keluaran 5 volt digunakan untuk menghidupkan seluruh rangkaian, yaitu rangkaian pada unit pemancar dan unit penerima.
Regulator tegangan 5 Volt (LM7805CT) digunakan agar keluaran yang dihasilkan tetap 5 volt walaupun terjadi perubahan pada tegangan masukannya. LED hanya sebagai indikator apabila PSA dinyalakan. Transistor PNP TIP 42 disini berfungsi sebagai penguat arus apabila terjadi kekurangan arus pada rangkaian, sehingga regulator tegangan (LM7805CT) tidak akan panas ketika rangkaian butuh arus yang cukup besar. Tegangan 12 volt DC langsung diambil dari keluaran jembatan dioda.
2. Rangkaian Mikrokontroler
Gambar 4.4 Rangkaian Skematik ATMega8535
Pada pin 9 dihubungkan dengan sebuah kapasitor 10 uF yang dihubungkan ke positip dan sebuah resistor 10 Kohm yang dihubungkan ke ground. Kedua komponen ini berfungsi agar program pada mikrokontroler dijalankan beberapa saat setelah power aktif. Lamanya waktu antara aktifnya power pada mikrokontroler dan aktifnya program adalah sebesar perkalian antara kapasitor dan resistor tersebut. Jika dihitung maka lama waktunya adalah :
10 10 1 det
t= =ΩR x C K =x µF m ik
3. Rangkaian Keypad
[image:65.595.226.431.194.357.2]Rangkaian ini merupakan sarana input untuk melakukan penyetelan terhadap nilai kecepatan motor. Berikut ini merupakan gambar rangkaian keypad yang digunakan pada rangkaian ini :
Gambar 4.5 Rangkaian Keypad
Dari gambar terlihat bahwa, ketika salah satu sakelar ditekan, maka sakelar tersebut akan mengirimkan logika 0 ke mikrokontroler. Namun jika dalam keadaan tidak ditekan, sakelar tersebut akan mengirimkan logika 1 ke mikrokontroler. Karakteristik inilah yang digunakan dalam rangkaian sehingga mikrokontroler dapat mengetahui adanya perubahan pada inputnya.
4. Rangkaian Driver Motor DC
[image:65.595.216.425.559.737.2]DC Chopper dirancang dari rangkaian dasar pada Gambar 4.1 tanpa menggunakan LPF (low pass filter). Hal ini karena DC gearhead motor yang digunakan sekaligus dianggap menjadi filter-nya atau simplikasi motor sebagai LPF orde 1. Rangkaian DC Chopper menggunakan MOSFET jenis BUZ11 (Q1) sebagai
komponen switchingnya, Rds (on) dari transistor ini cukup rendah sehingga disipasi daya yang dibangkitkan relatif rendah untuk rendah untuk arus maksimum yang diinginkan ( ± 5A).
Tegangan output yang dihasilkan akan berbentuk pulse (pulsa). BUZ11 (Q1) adalah
MOSFET jenis N Channel yang mampu melewatkan arus hingga 30 A. Transistor tersebut harus dilindungi dengan heatsink (pendingin) untuk menghindari panas berlebih akibat besarnya arus yang melewatinya.
5. Rangkaian LCD Karakter 2x16
[image:66.595.168.468.498.728.2]Rangkaian skematik LCD ini digunakan untuk menampilkan data kecepatan motor DC. Rangkaian skematik LCD dapat dilihat pada gambar di bawah ini:
Pada gambar rangkaian konektor LCD yang terdiri dari konektor Gnd (Ground), Vcc (5V), VEE, Reset, R/W (Read/Write), Enable, DB4-DB7 dihubungkan langsung ke konektor Mikrokontroler ATMega8535. Adapun potensiometer pada rangkaian diatas berfungsi untuk mengatur cahaya karakter yang ditampilkan pada LCD.
Mulai
Inisialisasi Pin dan Variabel yang
digunakan
Keypad up = 0?
A=A+1 Keypad down = 0?
A=A-1
Keypad enter = 0?
Nilai PWM = A
Putar motor sesuai nilai PWM
Keypad enter = 0? YA
Tidak
YA
Tidak
Tidak
Tidak
[image:68.595.208.451.83.550.2]YA YA
Gambar 4.8 Diagram Alir
Pada awal alat ini dinyalakan, alat ini akan menginisialisasi semua pin I/O dari mikrokontroler yang akan digunakan. Selain itu, program juga akan mennginisialisasi variable-variabel yang digunakan dalam program nantinya.
down ditekan, maka nilai varibel A akan dikurangi dengan 1. Variabel A ini lah yang nantinya akan digunakan penentu besar kecepatan motor.
Setelah itu, mikrokontroler akan menunggu keypad Enter ditekan. Ketika keypad enter ditekan, maka nilai A tadi dimasukkan ke dalam nilai PWM. Kemudian motor akan berputar sesuai dengan nilai PWM yang diberikan tadi. Motor akan tetap berputar sampai keypad Enter kembali ditekan. Ketika keypad Enter ditekan, program akan kembali mendeteksi adanya penekanan pada keypad Up atau down.
6. Spesifikasi Alat pada Laboratorium
Penelitian mengenai kendali kecepatan motor DC dilakukan pada Laboratorium Konversi Energi Listrik FT-USU
1. Motor DC
2. Power Suply AC dan DC
3. Voltmeter DC
4. Amperemeter DC
Spesifikasi motor dc yang digunakan AEG Type GF 110/140 dengan data-data sebagai berikut :
Type : GF 110/140 Ia : 9.1 Ampere
Pout : 2KW Im : 0.64 Ampere
IV.3. Rangkaian Pengujian
[image:70.595.158.482.160.396.2]IV.3.1 Rangkaian Kendali Kecepatan Motor DC Penguatan Bebas
Gambar 4.9 Rangkaian pengujian kecepatan motor DC Penguatan Bebas
IV.3.1.1 Prosedur Pengujian Kecepatan Motor DC Penguatan Bebas
1. Rangkaian pengujian dibuat seperti gambar , dimana semua switch dansemua PT DC dalam posisi minimum.
2. Tutup S1, naikkan PT DC II sampai A2 nominal
3. Tutup S1, naikkan PT DC I sampai putaran mencapai nominal, lalu catat n
dan V1 pada saat ini.
IV.3.2 Rangkaian kendali kecepatan Motor DC Penguatan Bebas dengan menggunakan Mikrokontroler
IV.3.2.1 Prosedur Pengujian Kecepatan Motor DC Penguatan Bebas dengan menggunakan Mikrokontroler
1. Rangkaian percobaan dibuat sesuai gambar.
2. On kan Power supply pada rangkaian, pada saat awal dinyalakan set point PWM pada LCD rangkaian dalam keadaan 0.
3. Naikkan PTDC sampai 200V, besaran maksimal ini didapatkan sesuai dari percobaan kendali kecepatan motor DC tanpa mikrokontroler.
4. Berikan input secara bertahap pada PWM dan catat putaran(n) dan tegangan yang di dapat.
IV.4. Data Hasil Pengujian
IV.4.1 Data Hasil Pengujian Kecepatan Motor DC Penguatan Bebas
If = 0.57A
V RPM
40 150
60 200
80 300
100 400
120 450
140 550
160 650
180 700
IV.4.2 Data Hasil Pengujian Kecepatan Motor DC Penguatan Bebas dengan menggunakan Mikrokontroler
If = 0,57 A
PWM V RPM
50 39,21 148
75 58,82 197
100 78,43 298
125 98,03 397
150 117,64 448
175 156,86 549
200 176,46 645
225 176,46 699
250 196,07 747
255 197,20 748
IV.5. Analisa Data Pengujian
Dari data ujicoba kecepatan motor DC tanpa menggunakan mikrokontroler dan dengan menggunakan mikrokontroler di dapat :
% Ralat tegangan :
% 100 % x V V V ralat teori alat teori − = Maka : % 975 , 1 % 100 40 21 , 39 40
%ralat= − x =
% Ralat RPM :
Maka :
% 33 , 1 % 100 150
148 150
%ralat = − x =
Cara perhitungan yang sama dilakukan untuk data yang lain, sehingga di dapatkan seperti tabel
Data Persen Ralat Dengan Menggunakan Mikrokontroler
PWM % Ralat Tegangan % Ralat RPM
50 1,9750 % 1,3333 %
75 1,9667 % 1,5 %
100 1,9625 % 0,6666 %
125 1,9700 % 0,75 %
150 1,9667 % 0,4444 %
175 1,9643 % 0,1818 %
200 1,9625 % 0,7692 %
225 1,9667 % 0,1428 %
Dari data pengujian akan diperoleh grafik sebagai berikut
Putaran VS Tegangan
BAB V
KESIMPULAN
6.1 Kesimpulan
Dari hasil kendali kecepatan motor DC dengan menggunakan mikrokontroler maka diperoleh kesimpulan bahwa :
1. Jika nilai PWM yang diprogram pada mikrokontroler semakin besar, maka tegangan yang dihasilkan pada motor semakin besar, sehingga putaran motor pun meningkat. Dan sebaliknya, apabila nilai PWM diperkecil, besar tegangan pada motor akan berkurang, sehingga putaran motor pun melambat.
2. Kecepatan motor DC dapat dikendalikan oleh mikrokontroler dan konverter arus searah.
3. Siklus kerja MOSFET mempengaruhi tegangan yang masuk ke motor, Sehingga semakin besar siklus kerja MOSFET semakin besar tegangan yang masuk ke motor, begitu juga sebaliknya.
4. Konverter arus searah dapat diaplikasikan dengan menggunakan MOSFET.
6.2Saran
DAFTAR PUSTAKA
1. Chapman Stephen J., “Electric Machinery Fundamentals, Mc Graw-Hill International Edition, 1999.
2. Desphande MV, “Electric Motors Application and Control”,A.H Wheeler & C.O. Privated Limited,Bombay,1985.
3. Dubey Gopal K, “Power Semiconductor Controlled Driver”, Prentice Hall,Engle Wood Cliffs,New Jersey,1989.
4. Eugene C Lister,”Mesin dan Rangkaian Listrik”,Edisi keenam,Erlangga, Jakarta.
5. Kadir Abdul, “Mesin Arus Searah”,Djambatan,Jakarta,1980.
6. Mehta V K dan Rohit,”Principles of Electrical Machines”,S.Chand dan Company LTD, Ram Nagar New Delhi,2002.
7. Rashid M.H,”Elektronika Daya : Rangkaian, Devais dan Aplikasinya”, Prenhallindo,Jakarta.1999
8. Theraja B.L., “A Text Book of Electrical Technology”, Nurja Construction & Development,New Delhi, 1980.
9. Wijaya, Mochtar, Dasar-dasar Mesin Listrik, Penerbit Djambatan, 2001. 10.Wardhana, Lingga. 2006. Belajar Sendiri Mikrokontroler AVR seri
ATMega8535. Yogyakarta: Penerbit ANDI.
11.Winoto, Ardi. 2008. Mikrokontroler AVR ATMega8/32/16/8535 dan Pemrogramannya. Bandung: Penerbit Informatika.
DATA SHEET ATMEGA8535
Konfigurasi pin ATmega8535 dengan kemasan 40 pin DIP (Dual Inline Package) dapat dilihat pada gambar. Dari gambar di atas dapat dijelaskan fungsi dari masing-masing pin Atmega8535 sebagai berikut:
1. VCC merupakan pin yang berfungsi sebagai masukan catu daya. 2. GND merukan pin Ground.
3. Port A (PortA0…PortA7) merupakan pin input/output dua arah dan pin masukan ADC.
Tabel Fungsi Khusus Port B
PIN FUNGSI KHUSUS
PB7 SCK (SPI Bus Serial Clock)
PB6 MISO (SPI Bus Master Input/ Slave Output) PB5 MOSI (SPI Bus Master Output/ Slave Input) PB4 SS (SPI Slave Select Input)
PB3 AIN1 (Analog Comparator Negative Input) OC0 (Timer/Counter0 Output Compare Match Output) PB2 AIN0 (Analog Comparator Positive Input)
INT2 (External Interrupt 2 Input) PB1 T1 (Timer/ Counter1 External Counter Input) PB0 T0 T1 (Timer/Counter External Counter Input)
XCK (USART External Clock Input/Output)
4. Port C (PortC0…PortC7) merupakan pin input/output dua arah dan pin fungsi khusus, seperti dapat dilihat pada tabel dibawah ini.
Tabel Fungsi Khusus Port C
PIN FUNGSI KHUSUS
PC7 TOSC2 ( Timer Oscillator Pin2) PC6 TOSC1 ( Timer Oscillator Pin1)
PC5 Input/Output
PC4 Input/Output
PC3 Input/Output
PC2 Input/Output
PC1 SDA ( Two-wire Serial Buas Data Input/Output Line) PC0 SCL ( Two-wire Serial Buas Clock Line)
Tabel 2.3 Fungsi Khusus Port D
PIN FUNGSI KHUSUS
PD7 OC2 (Timer/Counter Output Compare Match Output) PD6 ICP (Timer/Counter1 Input Capture Pin)
PD5 OC1A (Timer/Counter1 Output Compare A Match Output) PD4 OC1B (Timer/Counter1 Output Compare B Match Output) PD3 INT1 (External Interrupt 1 Input)
PD2 INT0 (External Interrupt 0 Input)
PD1 TXD (USART Output Pin)
PD0 RXD (USART Input Pin)
6. RESET merupakan pin yang digunakan untuk me-reset mikrokontroler. 7. XTAL1 dan XTAL2 merupakan pin masukan clock eksternal.