OLEH
GATOT TRIARDI PRAMAJI 111421003
PROGRAM STUDI EKSTENSI S1 ILMU KOMPUTER FAKULTAS ILMU KOMPUTER DAN TEKNOLOGI INFORMASI
UNIVERSITAS SUMATERA UTARA MEDAN
SKRIPSI
Diajukan untuk melengkapi tugas akhir dan memenuhi syarat mencapai gelar sarjana Komputer
GATOT TRIARDI PRAMAJI 111421003
PROGRAM STUDI EKSTENSI S1 ILMU KOMPUTER FAKULTAS ILMU KOMPUTER DAN TEKNOLOGI INFORMASI
UNIVERSITAS SUMATERA UTARA MEDAN
udul : RANCANG BANGUN SISTEM PENDETEKSI BANIR PADA DAERAH ALIRAN SUNGAI DENGAN MENGGUNAKAN SCADA (upervisory Control And Data Acquisition) BERBASIS MIKROKONTROLER AT89S51
Kategori : SKRIPSI
Nama : GATOT TRIARDI PRAMAI
Nomor Induk Mahasiswa : 111421003
Program Studi : ILMU KOMPUTER
Fakultas : ILMU KOMPUTER DAN TEKNOLOGI INFOMASI UNIVERSITAS SUMATERA UTARA
Komisi Pembimbing :
Pembimbing 2 Pembimbing 1
Drs. Dahlan Sitompul, M.Eng Dr. Poltak Sihombing, M.kom 19670725 200501 1 002 19620317 199103 1 001
Diketahui/disetujui oleh S1 – ILMU KOMPUTER Ketua,
Dr. Poltak Sihombing, M.Kom 19620317 199103 1 001
RANCANG BANGUN SISTEM ENDETEKSI BANJIR ADA DAERAH ALIRAN SUNGAI DENGAN MENGGUNAKAN SCADA (upervisory Control
And Data Acquisition) BERBASIS MIKROKONTROLER AT89S51
DRAFT SKRISI
enulis mengakui bahwa skripsi ini adalah hasil karya sendiri, kecuali beberaapa ringkasan dan kutipan yang masing – masing disebutkan sumbernya.
Medan, Oktober 2014
PENGHARGAAN
Alhamdullilah, Puji dan syukur penulis ucapkan kehadirat Allah SWT,
yang telah memberikan rahmat dan hidayah-Nya serta karunianya sehingga
skripsi ini berhasil penulis selesaikan dalam waktu yang telah ditetapkan . dimana
skripsi ini sebagai syarat untuk memperoleh gelar Sarjana Komputer pada
Program Studi Ekstensi S1 Ilmu Komputer Universitas Sumatera Utara.
Shalawat beriring salaim saya hadiahkan kepada Nabi Besar Muhammad SAW.
Ucapan terima kasih penulis sampaikan kepada Bapak Dr. Poltak Sihombing,
M.Kom sebagai pembimbing I dan Bapak Drs. Dahlan Sitompul, M.Eng selaku
pembimbing II yang telah memberikan bimbingan, saran, dan masukan untuk
menyempurnakan kajian penelitian ini. Panduan ringkas dan padat serta profesional
telah diberikan kepada penulis untuk dapat menyelesaikan skripsi ini. Selanjutnya
kepada para Dosen penguji Bapak M. Andri Budiman, ST, M.Comp.Sc, MEM dan
Bapak Drs. Agus Salim Harahap, Msi atas saran dan kritikan yang sangat berguna
bagi penyelesaian skripsi ini. Ucapan terima kasih juga ditujukan kepada Ketua
Program Studi Ekstensi S1 Ilmu Komputer, Bapak Dr. Poltak Sihombing, M.Kom
Fakultas Ilmu Komputer dan Teknologi Informasi Universitas Suratera Utara, semua
dosen Program Studi S1 Ilmu Komputer USU, dan pegawai di Ilmu Komputer USU.
Untuk kedua orangtua dan keluarga saya yang telah memberikan
dukungan, do'a dan motivasi yang menggugah. Skripsi ini terutama penulis
persembahkan untuk Papa (H.Mulyadi), Mama (Hj.Sri Astuty) dan kakanda
Poppy E.H dan Puput D.H, adinda sayang Darayani yang membimbing saya
sampai saat ini dan saat yang akan datang. Dan tak lupa juga penulis ucapkan
kepada Project Manager PT.SIS, Bapak M.Sholihin dan Head Departement
Enginering & Estimation, Bapak Istadi atas kerendahan hatinya memberikan
Penulis menyadari bahwa skripsi ini masih jauh dari
kesempurnaan, karena kesempurnaan hanya milik Allah SWT. Oleh karena
itu saya menerima kritik dan saran yang bersifatnya membangun demi
kesempurnaan skripsi ini. Sehingga dapat bermanfaat bagi kita semuanya. Akhir
kata Penulis Ucapkan Terima Kasih.
Medan , Oktober 2014
banjir ke pada seluruh warga (main layer information), memiliki tingkat urgensi yang sangat tinggi. Banjir yang kerap kali datang secara tiba – tiba menimbulkan kerugian yang sangat besar, sehingga warga tidak dapat bersiaga mennghadapi bencana banjir. Pemecahan masalah banjir yang telah dibagun sejauh ini belum mampu untuk mereduksi kerugian dikarenakan informasi tersebut masih lamban. Visialisasi dan pencatatan sekala manual membutuhkan waktu yang cukup lama untuk dapat menyimpulkan bahwa terjadi kenaikan rata muka air secara signifikan. Untuk pemecahan masalah tersebut, dirancanglah sebuah sistem pendeteksi yang mampu memonitor ketinggian rata-rata air secara real time, serta dapat memberikan peringatan kepada pengguna informasi tentang banjir. Diawali oleh sensor ultrasonik yang mampu mendetaksi pergerakan tinggi muka air pada DAS, data hasil pengukuran tersebut akan diolah menggunakan Mikrokontroller tipe AT89S51 sebagai pusat pengolahan data, dan selanjutnya data tersebut dikirim menggunakan media komunikasi wireless infrared untuk selajutnya ditampilkan pada Grafik User Interface (GUI) pada PC. Sistem Superisory And Data Aquisition (SCADA) yang dibangun sudah dilengkapi pengolahan data secara real time, animasi lampu indikator, sirene sebagai tanda peringatan dini, dan data base sebagai media penyimpanan data monitoring hasil pengukuran. Dari percobaan yang telah dilakukan, didapat kesimpulan bahwa sistem sudah mampu mendeteksi tinggi – rendahnya muka air dengan akurat dan menampilkan hasil monitoring tersebut pada GUI.
BASE MICROCONTROLLER AT89S51
ABSTRACT
The need for a real time flooding information on watersheds (DAS) flood prone to the whole community (main layer information), has a ery high degree of urgency. Flooding that often come suddenly causing ery large losses, so that citizens can not prepare for flooding. Trouble sole the problem of flooding who has been built so far hae not been able to reduce the information loss due to still slowly. Visualizing and manual recording scale requires a long time to be able to conclude that an increase in The aerage water leel significantly. For to soling this problem, designed detection system that is able to monitoring the an aerage altitude of the water in real time, and can gie a warning to the user information about the flooding. Preceded by an ultrasonic sensing is able to detect the moement of water leel in the watershed, the measurement result data will be processed using microcontroller type AT89S51 as the data processing center, and then the data is sent using infrared wireless communication medium to hereinafter displayed on the Graphic User Interface (GUI) on PC. Superisory System And Data Acquisition (SCADA), which is built is equipped with data processing in real time, the animated indicator lights, sirens as early warning signs, and the data base for the storage of monitoring data of the measurement results. From the experiments hae been conducted, be concluded that system is already capable of detecting high - low water leel accurately and display the results of such monitoring on the GUI.
Persetujuan ii
Pernyataan iii
Penghargaan i
Abstrak
Abstrac i
Daftar Isi ii
Daftar Tabel xi
Daftar Gambar xii
Daftar Lampiran xi
BAB 1 PENDAHULUAN 1
1.1 Latar Belakang 1
1.2 Rumusan Masalah 2
1.3 Batasan Masalah 2
1.4 Tujuan Penelitian 3
1.5 Manfaat Penelitian 3
1.6 Metodologi Penelitian 3
2.2 Snar Infra Merah 6
2.3 Gelombang Ultrasonc 7
2.4 Perangkat Keras Sstem 8
2.4.1 Mkrokontroler 8
2.4.1.1 Arstektur Mkrokontroler AT89S51 8
2.4.1.2 Spesfkas Pentng AT89S51 9
2.4.1.3 Struktur Pengoperasan Port 12
2.4.2 Sensor 14
2.4.2.1 Tranduser Ultrasonc 15
2.4.2.2 Sensor Ultrasonc PING Parallax 15
2.4.3 MAX232 17
2.4.4 Komunkas Seral RS232 19
2.5 Perangkat Lunak Sstem 21
2.5.1 Bahasa Assembly 21
2.5.2 Software 8051 Edtor, Assembler, Smulator (IDE) 26
2.5.3 Software Downloader 27
2.5.4 Vsual Basc 6.0 27
2.5.4.1 Konsep Dasar Pemrograman Dalam Vsual Basc 6.0 28
2.6 Flow Chart 29
2.6.1 Data Flow Dagram (DFD) 30
BAB 3 ANALISIS DAN PERANCANGAN 32
3.1.3 Perancangan Sensor 33
3.1.4 Perancangan Power Supply (PSA) 35
3.1.5 Perancangan Rangkaian Mikrokontroler AT89S51 35
3.1.6 Perancangan Rangkaian Pengirim Data Melalui Infra Merah 37
3.1.7 Perancangan Rangkaian Penerima Data Melalui Infra Merah 39
3.2 Perancangan Software 40
3.2.1 Flow Chart Minimum sistem Mikrokontroler 41
3.2.2 Perancangan Permodelan Sistem Dengan Use Case Diagram 42
3.2.3 Perancangan Data Flow Diagram (DFD) 44
3.2.3.1 DFD Level 0 45
3.2.3.2 DFD Level 1 45
3.2.4 Perancangan Antar Muka (Interface) 45
3.2.4.1 Rancangan Menu Utama 46
3.2.4.2 Rancangan Form Connection Port 47
3.2.4.3 Rancangan Form Hasil Pengukuran Acquisition Data 47
3.2.4.4 Rancangan About 48
BAB 4 IMPLEMENTASI DAN PENGUJIAN SISTEM 49
4.1 Pengujian Perangkat Hardware 49
4.1.1 Pengujian Mikrokontroler AT89S51 49
4.1.2 Pengujian Sensor Ultrasonic 51
4.1.4.1 Pengujian Rangkaian Pengirim Data 57
4.1.4.2 Pengujian Rangkaian Penerima Data 60
4.2 Pengujian Perangkat Lunak 61
4.2.1 Spesifikasi Kebutuhan Hardware 61
4.2.2 Spesifikasi Kebutuhan Software 61
4.2.3 Tampilan Interface Sistem 62
4.2.3.1 Tampilan Menu Utama 62
4.2.3.2 Tampilan Form Koneksi Port Serial 62
4.2.3.3 Tampilan Hasil Pengukuran Acquisition Data 63
4.2.3.4 Tampilan About 64
4.3 Hasil Implementasi Dan Pengujian 64
4.3.1 Hasil Pengujian Keseluruhan Sistem 64
BAB 5 KESIMPULAN DAN SARAN 66
5.1 Kesimpulan 66
5.2 Saran 66
Hal.
TABEL 2.1 Simbol-simbol Flowchart Diagram 30
TABEL 2.2 Simbol-simbol Data Flow Diagram 31
TABEL 3.1 Naratif Use Case Sistem Akuisisi Data Pengukur Tinggi Muka Air 43
TABEL 4.1 Hasil Data Bit Aktual Dari Varian Jarak Sensor 53
TABEL 4.2 Hasil Analisis Ketelitian Alat 55
Hal.
GAMBAR 2.1 Spektrum Sinar 6
GAMBAR 2.2 Pembagian Rentang Frekuensi Gelombang Akustik 7
GAMBAR 2.3 Diagram Blok AT89S51 8
GAMBAR 2.4 Susunan Pin pada Mikrokontroler AT89S51 10
GAMBAR 2.5 Sensor Ultrasonic PING Paralla 15
GAMBAR 2.6 Diagram Waktu Sensor PING 17
GAMBAR 2.7 Jarak Ukur Sensor PING 17
GAMBAR 2.8 Skema Diagram IC MAX232 18
GAMBAR 2.9 Gelombang INformasi untuk Komunikasi Serial 19
GAMBAR 2.10 Konfigurasi Pin Konektor Serial DB9 20
GAMBAR 2.11 8051 Editor, Assembler, Simulator (IDE) 26
GAMBAR 2.12 Tampilan Software Downloader 27
GAMBAR 2.13 Interface Visual Basic 6.0 27
GAMBAR 3.1 Diagram Blok Sistem Pendeteksi Banjir 32
GAMBAR 3.2 Perancangan Sensor Ultrasonic PING 33
GAMBAR 3.3 Driver Sensor Ultrasonic PING 34
GAMBAR 3.4 Rangkaian Power Supply (PSA) 35
GAMBAR 3.5 Rangkaian Mikrokontroler AT89S51 36
GAMBAR 3.6 Rangkaian Pengirim Data Melalui Media Infra Merah 37
GAMBAR 3.9 Use Case Diagram Sistem Aplikasi 42
GAMBAR 3.10 Activity Diagram Sistem Akuisisi Data 44
GAMBAR 3.11 DFD Level 0 Proses Sistem Akuisisi Data Pendeteksi Banjir 45
GAMBAR 3.12 DFD Level 1 Proses Sistem Akuisisi Data dan Data Base 45
GAMBAR 3.13 Rancangan Menu Utama 46
GAMBAR 3.14 Rancangan Form Koneksi Port Serial 47
GAMBAR 3.15 Rancangan Form Acquisition Data 48
GAMBAR 3.16 Rancangan About 48
GAMBAR 4.1 Pengujian Rangkaian Mikrokontroler AT89S51 49
GAMBAR 4.2 Rangkaian Penguji Sensor Ultrasonic 51
GAMBAR 4.3 Grafik Data Teori vs Jarak 54
GAMBAR 4.4 Grafik Data Aktual Praktek vs Jarak 55
GAMBAR 4.5 Rangkaian LED Pemancar Infra Merah 57
GAMBAR 4.6 Rangkaian TSOP 1738 Penerima Infra Merah 60
GAMBAR 4.7 Tampilan Menu Utama 62
GAMBAR 4.8 Tampilan Form Sub Menu Connection Port 63
GAMBAR 4.9 Tampilan Form Sub Menu Acquisition Data 63
GAMBAR 4.10 Tampilan Sub Menu About 64
Hal.
LAMPIRAN 1 Listing Program Visual Basic 6.0 A – 1
LAMPIRAN 2. Listing Program Assembly B – 1
banjir ke pada seluruh warga (main layer information), memiliki tingkat urgensi yang sangat tinggi. Banjir yang kerap kali datang secara tiba – tiba menimbulkan kerugian yang sangat besar, sehingga warga tidak dapat bersiaga mennghadapi bencana banjir. Pemecahan masalah banjir yang telah dibagun sejauh ini belum mampu untuk mereduksi kerugian dikarenakan informasi tersebut masih lamban. Visialisasi dan pencatatan sekala manual membutuhkan waktu yang cukup lama untuk dapat menyimpulkan bahwa terjadi kenaikan rata muka air secara signifikan. Untuk pemecahan masalah tersebut, dirancanglah sebuah sistem pendeteksi yang mampu memonitor ketinggian rata-rata air secara real time, serta dapat memberikan peringatan kepada pengguna informasi tentang banjir. Diawali oleh sensor ultrasonik yang mampu mendetaksi pergerakan tinggi muka air pada DAS, data hasil pengukuran tersebut akan diolah menggunakan Mikrokontroller tipe AT89S51 sebagai pusat pengolahan data, dan selanjutnya data tersebut dikirim menggunakan media komunikasi wireless infrared untuk selajutnya ditampilkan pada Grafik User Interface (GUI) pada PC. Sistem Superisory And Data Aquisition (SCADA) yang dibangun sudah dilengkapi pengolahan data secara real time, animasi lampu indikator, sirene sebagai tanda peringatan dini, dan data base sebagai media penyimpanan data monitoring hasil pengukuran. Dari percobaan yang telah dilakukan, didapat kesimpulan bahwa sistem sudah mampu mendeteksi tinggi – rendahnya muka air dengan akurat dan menampilkan hasil monitoring tersebut pada GUI.
BASE MICROCONTROLLER AT89S51
ABSTRACT
The need for a real time flooding information on watersheds (DAS) flood prone to the whole community (main layer information), has a ery high degree of urgency. Flooding that often come suddenly causing ery large losses, so that citizens can not prepare for flooding. Trouble sole the problem of flooding who has been built so far hae not been able to reduce the information loss due to still slowly. Visualizing and manual recording scale requires a long time to be able to conclude that an increase in The aerage water leel significantly. For to soling this problem, designed detection system that is able to monitoring the an aerage altitude of the water in real time, and can gie a warning to the user information about the flooding. Preceded by an ultrasonic sensing is able to detect the moement of water leel in the watershed, the measurement result data will be processed using microcontroller type AT89S51 as the data processing center, and then the data is sent using infrared wireless communication medium to hereinafter displayed on the Graphic User Interface (GUI) on PC. Superisory System And Data Acquisition (SCADA), which is built is equipped with data processing in real time, the animated indicator lights, sirens as early warning signs, and the data base for the storage of monitoring data of the measurement results. From the experiments hae been conducted, be concluded that system is already capable of detecting high - low water leel accurately and display the results of such monitoring on the GUI.
BAB 1 PENDAHULUAN
1.1 Latar Belakang
Air sungai yang meluap diakibatkan oleh curah hujan yang tinggi dan dalam selang
waktu yang lama terjadi di bagian hulu sungai. Ketidak tersedianya daerah resapan
yang diakibatkan oleh penebangan liar yang terjadi di daerah aliran sungai (DAS)
megakibatkan air tidak dapat meresap, sehingga jalan satu-satunya aliran air
seluruhnya tertumpah ke aliran sungai, sehingga permukaan air pada sungai akan
meningkat.
Banjir kerapkali datang tidak terduga secara tiba-tiba tanpa adanya informasi
yang akurat. Akibatnya tidak sedikit masyarakat di hilir sungai harus menanggung
resiko terkena dampak bencana banjir yang dapat menelan kerugian harta benda, serta
mengganggu kegiatan perekonomian di daerah tersebut maupun kehilangan nyawa.
Kerugian yang cukup besar tersebut dikarenakan masih kurang dan terbatasnya sistem
pemantau dan peringatan dini akan bencana banjir pada DAS. Dewasa ini penerapan
teknologi informasi pada bendungan atau DAS di hulu sungai masih menggunakan
teknologi konvensional dengan memanfaatkan visualisasi manual yang dilakukan oleh
operator terhadap tinggi-rendahnya permukaan air, sehingga tidak dapat memantau
serta menginformasikan ketinggian dan debit air secara Real Time. Adapun upaya
yang lain sudah dilakukan secara sistem konvensional, salah satunya dengan
menggunakan informasi SMS (Short Message Service) dari warga yang berada di hulu
sungai. Tetepi cara konvensional ini masih mempunyai kelemahan, diantaranya
informasi yang disampaikan hanya kepada beberapa warga di hilir sungai dan bukan
kepada seluruh warga (Second layer), hal ini dipengaruhi juga terhadap ketersediaan
layanan provider dan jaringan pada daerah hulu sungai, sehingga warga tidak dapat
Seharusnya masalah banjir ini memiliki tingkat urgensi yang sangat tinggi,
sehingga harus dibangun sebuah sistem mandiri yang ditujukan kepada pengelola
informasi untuk disampaikan ke (Main layer) semua warga di hilir sungai.
Berangkat dari permasalahan ini maka dibutuhkan suatu prototipe sistem
pendeteksi banjir pada bendungan dengan menggunakan SCADA ( Supervisory
Control And Data Acquisition ), dimana di awali oleh proses pengukuran sensor
ketinggian (level sensing) air di aliran sungai, sehingga didapatlah besaran – besaran
paremeter tersebut secara Real Time dari keluaran sensor. Berdasar dari kebutuhan
real time inilah dibutuhkan data akurat yang selanjutnya mengirimkan informasi
secara cepat dan kontinyu pada pusat sistem, sehingga apabila terjadi kenaikan aliran
permukaan secara signifikan, sistem akan melakukan suatu tindakan
menginformasikan tinggi air serta memberikan peringatan kepada warga masyarakat
yang berada di hilir sungai.
Dengan adanya sistem ini diharapkan dapat menginformasikan tinggi air pada
aliran sungai Sehingga masyarakat yang berada di hilir sungai dapat bersiaga serta
dapat mereduksi kerugian – kerugian yang ditimbulkan oleh banjir tersebut.
1.2 Rumusan Masalah
Berdasarkan latar belakang di atas, perlu dibuat suatu sistem yang dapat memberikan
informasi secara dini tentang tinggi muka air pada aliran di hulu sungai, serta
pengelolaan informasi dan akuisisi data.
1.3 Batasan Masalah
Adapun batasan masalah pada masalah ini adalah sebagai berikut:
1. Hanya membahas mengenai rancang bangun pendeteksi banjir Jarak Jauh
menggunakan sistem komunikasi data wireless Infrared secara umum.
2. Sensor yang digunakan adalah sensor ultra sonic buatan PING ))) parallax.
3. Mikrokontroler yang digunakan adalah mikrokontroler MCS-51 tipe AT89S51.
4. Bahasa yang digunakan dalam pemrograman mikrokontroller adalah bahasa
visual basic 6.0 dan bahasa Assembly.
5. Pengiriman dan penerima data telemetri dilakukan secara wireless menggunakan
1.4 Tujuan Penelitian
Membuat suatu alat yang mampu mendeteksi kondisi debit air pada DAS serta
menyampaikan informasi tersebut kepada pengguna.
1.5 Manfaat penelitian
Diharapkan alat ini dapat memberikan data yang akurat dari pengukuran dan
selanjutnya peringatan dini kepada masyarakat di hilir sungai sehingga dapat
mereduksi kerugian – kerugian yang ditimbulkan oleh banjir tersebut pada daerah
aliran sungai rawan banjir.
1.6 Metodologi Penelitian
Untuk mempermudah pemahaman serta pembahasan bagaimana sebenarnya prinsip
kerja alat sistem pendeteksi banjir pada DAS dengan menggunakan SCADA dan
Mikrokontroller AT89S51, maka sistematika metodologi penelitian laporan tugas
akhir ini adalah sebagai berikut:
1. Studi Literatur
Pada studi literatur akan dilakukan studi kepustakaan melelui penelitian berupa
buku, jurnal dan artikel-artikel yang relevan, serta mempelajari lebih jauh tentang
cara pengukuran ketinggian (Level Sensing) muka air dan Mikrokontroller.
2. Pengumpulan Data
Dalam tahapan selanjutnya yaitu pengumpulan data-data yang valid mengenai
cara pengukuran ketinggian air menggunakan sensor ultra sonik.
3. Analisis dan Perancangan Sistem
Dilakukan analisis terhadap masalah-masalah yang terjadi untuk mendapatkan
solusi terbaik terhadap masalah tersebut dan membuat perencanaan struktur
rangkaian dasar yaitu : diagram blok rangkaian, flowchart (diagram alir) program,
skematik dari masing-masing sub rangkaian, serta program yang akan diisikan ke
mikrokontroller AT89S51 untuk menunjang kinerja sistem pengukuran tinggi
4. Pengujian sistem
Pada tahapan ini akan dilakukan pengujian sistem secara keseluruhan baik dari
perangkat keras maupun dari perangkat lunak untuk melihat apakah sistem sudah
sesuai dengan perancangan.
1.7 Sistematika Penulisan
Susunan penulisan Tugas Akhir ini disajikan dalam beberapa bab, yaitu:
BAB 1 : PENDAHULUAN
Dalam bab ini berisikan mengenai latar belakang, rumusan masalah, tujuan
penulisan, batasan masalah, serta sistematika penulisan.
BAB 2 : LANDASAN TEORI
Dalam bab ini dijelaskan tentang teori pendukung yang digunakan untuk
pembahasan dan cara kerja rangkaian. Teori pendukung yang di bahas antara lain:
sensor Ping ))), Mikrokontroller, bahasa pemograman yang digunakan,serta
karakteristik dari komponen-komponen pendukung.
BAB 3 : PERANCANGAN ALAT DAN PROGRAM
Pada bagian ini akan dibahas sistem perancangan alat yaitu: diagram blok
rangkaian, flowchart (diagram alir) dari rangkaian, skematik dari masing-masing sub
rangkaian, serta program yang akan diisikan ke mikrokontroller AT89S51.
BAB 4 : PENGUJIAN DAN ANALISA
Dalam bab ini akan dibahas tentang hasil pengujian dan analisa dari alat untuk
membuktikan kebenaran dari alat yang dibuat.
BAB 5 : PENUTUP
Bab ini menjelaskan kesimpulan dan saran dari alat ataupun data yang
BAB 2
LANDASAN TEORI
2.1.Pengukuran
Pada kenyataanya pengukuran sering dilakukan oleh manusia, dikarenakan untuk
mendapatkan perbandingan ataupun tolak ukur terhadap suatu keadaan. Secara
harafiah pengukuran yaitu kegiatan atau proses membandingkan sesuatu
besaran-besaran dasar (panjang, massa, waktu dan sebagainya) dan relevan yang dipakai untuk
tujuan mendifinisikan atau memberikan gambaran yang jelas tentang suatu objek
besaran yang diukur. Salah satu contohnya yaitu mengukur ketinggian muka air di
sungai sehingga didapat suatu definisi tertentu dari keadaan yang diukur yaitu tinggi
atau rendah pada permukaan air sungai tersebut.
Dilihat dari tinjauan tujuan pengukuran, setidaknya dapat memenuhi tiga aspek
diantaranya yaitu :
1. ketelitian (presision)
ketelitian alat menyatakan derajat kepastian hasil pengukuran. Suatu alat ukur
dikatakan memiliki tingkat ketelitian yang tinggi jika dilakukan pengukuran
beberapa kali, dimana nilai yang didapat mendekati sama atau konstan terhadap
besaran acuan.
2. Ketepatan (Akurasi)
Akurasi adalah kesesuaian antara hasil pengukuran dengan nilai yang sebenarnya
(standar). Dengan kata lain suatu alat ukur harus memiliki kehandalan terhadap
3. Sensitivitas (kepekaan)
Kepekaan suatu alat ukur adalah ukuran minimal yang masih terseteksi oleh alat
tersebut yang ditentukan berdasarkan respon terjadinya perbedaan suatu besaran
yang terdeteksi atau terbaca persatuan besaran sebenarnya.
2.2. Sinar Inframerah
Spektrum sinar matahari terdiri dari cahaya tampak dan tidak tampak yang dibawa
oleh materi gelombang elektromagnetik dari cahaya matahari. Sinar infra merah
merupakan sianar tidak tampak (antara 700 nm dan 1 mm) dikarenakan panjang
gelombang lebih besar dari cahaya tampak, sehingga tidak terlihat oleh mata. Namun
demikian, radiasi panas yang ditimbulkan infra merah masih terasa atau masih dapat
terdeteksi. Infra merah dapat dibedakan menjadi tiga,yaitu:NIR, MIR dan FIR.
Gambar 2.1 Spektrum sinar
Infra merah dapat dibedakan menjadi tiga daerah yakni:
1. Near Infra Merah (0.75 - 1.5 µm)
Near IR atau NIR, yaitu infra merah dengan panjang gelombang pendek ( =0.75- 1.5µm), banyak digunakan untuk pencitraan pandangan malam seperti pada
2. Mid Infra Merah (1.50 - 10 µm)
Mid IR atau MIR, yaitu infra merah dengan panjang gelombang menengah ( =1.50-10µm), banyak digunakan pada teropong bintang pada Observatorium. 3. Far Infra Merah (10 - 100 µm)
Far IR atau FIR, yaitu infra merah dengan gelombang panjang ( =10-100µm)
digunakan pada alat-alat kesehatan, yang kemudian dikembangkan lagi pada
bidang-bidang lainnya, seperti keamanan di bandara berupa pengecekkan senjata
biasa, senjata kimia, senjata biologi serta senjata lainnya serta dapat dimanfaatkan
sebagai media pengirim dan penerima data dalam jalur komunikasi wireless.
2.3 GelombangUltrasonic
Gelombang Ultrasonik atau gelombang suara yaitu suatu gelombang yang
dirambatkan sebagai gelombang mekanik yang menjalar dalam beberapa medium,
diantaranya medium padat, cair atau pun gas. Gelombang suara ini merupakan getaran
antar molekul zat yang saling beradu satu sama lain. Namun demikian zat tersebut
terkoordinasi menjadi suatu gelombang dan mentransmisikan energi tampa adanya
perpindahan partikel.
Gambar 2.2. Pembagian rentang Frekuensi gelombang Akustik
Gelombang ultrasonik merupakan gelombang mekanik dengan frekuensi diatas
20 kHz sehingga tidak terdengar oleh telinga manusia. Gelombang ini banyak
dimanfaatkan dalam bidang dunia industri, maritim, dan kedokteran. Dalam dunia
industri sering dijumpai pengukuran ketinggian atau sound test untuk melihat retakan
pada material, sedangkan didunia kedokteran gelombang ultrasonik digunakan sebagai
2.4 Prangkat Keras Sistem
2.4.1 Mikrokontroler
Dalam merancang aplikasi elektronika digital dibutuhkan sebuah alat/komponen yang
dapat menghitung, mengingat, dan mengambil pilihan serta digunakan sebagai
pemrosesan data. Kemampuan ini dimiliki oleh sebuah komputer, namun tidaklah
efisien jika harus menggunakan komputer hanya untuk keperluan tersebut. Untuk itu
peran komputer dapat digantikan dengan sebuah minimun sistem mikrokontroler.
Sistem kerja Mikrokontroler sama dengan mikroprosesor, namun
mikrokontroller lebih efisien untuk keperluan aplikasi elektronika digital sederhana
dikarenakan pada device ini sudah terdapat RAM, ROM, dan prosesor dalam satu
chip. Mikrokontroler seri MCS-51 termasuk sederhana, murah dan mudah didapat
dipasaran. Salah satu mikrokontroler seri MCS-51 adalah mikrokontroler AT89S51.
2.4.1.1 Arsitektur Mikrokontroler AT89S51
Mikrokontroler AT89S51 adalah mikrokontroler keluaran ATMEL.Inc.
Mikrokontroler ini kompatibel dengan keluaran mikrokontroler 80C51.
Mikrokontroller AT89S51 terdiri dari 40 pin dan sudah memiliki memory flash
didalamnya, sehingga sangat praktis untuk digunakan. Berikut diagram blok AT89S51
secara umum terdapat 4 port untuk I/O serta tersedianya akumulator, RAM, Stac
pointer, ALU, pengunci (latch) dan rangkaian osilasi.
Beberapa kemampuan (fitur) yang dimiliki adalah sebagai berikut :
1. Memiliki 4K Flash EPROM yang digunakan untuk menyimpan program.
Flash EPROM(Erasable Programmable Read Only Memory) dapat ditulis dan
dihapus sebanyak 1000 kali (menurut manual).
2. Memiliki internal RAM 128 byte.
RAM (Random Access Memory), suatu memori yang datanya akan hilang bila
catu padam, diakses secara random, tidak sekuensial, artinya dialamat mana saja
dapat dicapai secara langsung dengan cepat.
3. 4 buah 8-bit I/O (Input/Output) port
Port ini berfungsi sebagai terminal input dan output. Selain itu, dapat digunakan
sebagai terminal komunikasi paralel, serta komunikasi serial (pin10 dan 11).
4. Dua buah timer/counter 16 bit.
5. Operasi clock dari 0 hingga 24 MHz
6. Program bisa diproteksi, sehingga tidak dapat dibaca oleh orang lain.
7. Menangani 6 sumber interupsi.
2.4.1.2 Spesifikasi penting AT89S51 :
Untuk mendukung fungsi pengendalian, mikrokontroller AT89S51
memiliki spesipikasi yaitu:
1. Tegangan kerja 4-5.0V .
2. Bekerja dengan rentang 0 – 33MHz.
3. 256x8 bit RAM internal.
4. 32 jalur I/0 dapat deprogram.
5. 3 buah 16 bit Timer/Counter.
6. 8 sumber interrupt.
7. Saluran full dupleks serial UART yang dapat digunakan sebagai
media transfer data serial atau pun parallel ke PC.
Berikut adalah gambar susunan pin pada Mikrokontroller AT89S51:
Gambar 2.4 Susunan Pin pada Mikrokontroller AT89S51
Keterangan fungsi-fungsi masing-masing pin adalah sebagai berikut :
Pin 40 : Vcc, Masukan catu daya +5 volt DC
Pin 20 : Gnd, Masukan catu daya 0 volt DC
Pin 32-39 : P0.0-P0.7, Port input/output delapan bit dua arah yang juga dapat
berfungsi sebagai bus data dan bus alamat bila mikrokontroler
menggunakan memori luar (eksternal).
Pin 1-8 : P1.0-P1.7, Port input/output dua arah delapan bit dengan internal
pull up.
Pin 10-17 : P3.0-P3.7Port input/output delapan bit dua arah, selain itu Port 3
juga memiliki alternativef fungsi sebagai :
RXD (pin 10) : Port komunikasi input serial
INT0 (pin 12) : Saluran Interupsi eksternal 0 (aktif rendah)
INT1 (pin 13) : Saluran Interupsi eksternal 1 (aktif rendah)
T0 (pin 14) : Input Timer 0
T1 (pin 15) : Input Timer 1
WR (pin 16) : Berfungsi sebagai sinyal kendali tulis, saat prosesor akan menulis
data ke memori I/O luar.
RD (pin 17) : Berfungsi sebagai sinyal kendali baca, saat prosesor akan membaca
data dari memori I/O luar.
Pin 9 : RESET, Pin yang berfungsi untuk mereset mikrokontroller
AT89S51 ke keadaan awal.
Pin 30 : ALE (Address Latch Enable), berfungsi menahan sementara
alamat byte rendah pada proses pengalamatan ke memori eksternal.
Pin 29 : PSEN (Program Store Enable), Sinyal pengontrol yang berfungsi
untuk membaca program dari memori eksternal.
Pin 31 : EA, Pin untuk pilihan program, menggunakan program internal : atau eksternal. Bila „0‟, maka digunakan program eksternal.
Pin 19 : X1, Masukan ke rangkaian osilator internal. Sumber osilator
eksternal atau quartz crystal kristal dapat digunakan.
Pin 18 : X2, Masukan ke rangkaian osilator internal, koneksi quartz crystal
2.4.1.3 Struktur Pengoperasian Port
Struktur pengoperasian port terdiri atas :
a. Port Input/Output
One chip mikrokontroller ini memiliki 32 jalur port yang dibagi menjadi 4 buah port 8
bit. Masing-masing port ini bersifat bidirectional sehingga dapat digunakan sebagai
input port atau output port. Pada bok diagram AT89S51 dapat dilihat latch tiap bit
pada keempat port : port 0, port 1, port 2, port 3. Masing-masing jalur port terdiri dari
latch, output driver dan input buffer. Port 0 dan port 2 dapat digunakan sebagai
saluran data dan alamat. Port 0 sebagai saluran data, sedangkan port 2 sebagai saluran
data dan alamat sekaligus yang dimultipleks. Untuk mengakses memory eksternal,
port 0 akan mengeluarkan alamat bawah memori eksternal yang dimultipleks dengan
data yang dibaca dan ditulis. Sedangkan port 2 mengeluarkan bagian atas memory
eksternal sehingga total alamat semuanya 16 bit.
Latch yang digunakan dapat dipresentasikan dengan D-FlipFlop. Data dari bus
internal di-latch saat CPU memberi sinyal tulis ke latch dan output latch diberikan ke
bus internal sebagai respon dari sinyal baca pin dari CPU. Beberapa instruksi yang
berfungsi membaca port mengaktifkan sinyal baca latch dan yang lain mengaktifkan
sinyal baca pin. Port 1, port 2, dan port 3 mempunyai pull-up internal, sedangkan port
0 dengan open drain. Masing-masing jalur I/O dapat digunakan sebagai input atau
output. Bila digunakan sebagai input, port latch harus 1. Untuk port 1, 2 dan 3, pin-pin
akan di pull-up tinggi oleh pull-up internal, dan bisa juga di pull-up rendah dengan
sumber eksternal.
b. Timer/Counter
One chip mikrokontroller ini memilik dua timer yang dapat dikonfigurasikan
beroperasi sebagai timer atau counter. Saat berfungsi sebagai timer, isi register timer
ditambah 1 untuk tiap siklus mesin, sedangkan untuk fungsi counter isi register akan
bertambah 1 setiap ada transisi sinyal pada pin input eksternal.
Pada pemanfaatan sebagai counter, sinyal input yang dimaksudkan dapat
yang ada sesuai inisialisasi harga awal dari counter pada nilai hitungan untuk tiap
sampling. Inisialisasi harga awal ini berupa nilai preset negatif counter yang diatur
sebelum counter dijalankan.
Demikian halnya dengan pemanfaatan timer yang memerlukan inisialisasi
awal berupa konstanta waktu yang menentukan sampai berapa lama akan terjadi roll
over. Penentuan harga preset ini berhubungan dengan penggunaan frekuensi clock dari
sistem penentu waktu sampling dari counter untuk mencacah suatu pulsa masukan
dari luar dengan memanfaatkan kontrol interupsi yang ada serta pengaturan program.
Sebagai tambahan pada pemilihan countr/timer, timer 0 dan timer 1 mempunyai 4
buah modul yang dapat dipilih dengan menentukan pasangan bit M0 dan M1 pada
register TMOD. Untuk pemilihan timer/counter dikontrol dengan bit C/T di TMOD.
1. Mode 0
Overflow dari TL1 tidak hanya menset TF1 tapi juga mereload TL1 dengan isi TH1.
Setelah reload isi TH1 tidak akan berubah. Operasi mode ini juga sama dengan
timer/counter 0.
4. Mode 3
Pada mode ini timer 1 tidak akan bekerja. Sedangkan timer 0 menjadi 2 counter yang
terpisah. TL0 digunakan sebagai bit kontrol untuk timer 0; C/T, GATE, TR0, INT0,
2.4.2 Sensor
Definisi umum sensor adalah perangkat atau divais yang digunakan untuk merubah
suatu besaran fisis atau kimia menjadi besaran listrik sehingga dapat dianalisa dengan
rangkaian listrik tertentu [Jacob Fraden,2004]. Sensor dapat diklasifikasikan sesuai
dengan jenis transfer energi yang dapat dideteksi yaitu:
a. sensor Thermal
Sensor thermal adalah sensor yang digunakan untuk mendeteksi gejala perubahan
panas/temperatur/suhu pada suatu dimensi benda atau dimensi ruang tertentu.
Contohnya thermocouple, Resistan Temprature Detektor (RTD). Kedua contoh
tersebut menggunakan prisip termoelektris. Dua buah logam metal konduktor diatur
suhunya pada salah satu logam sehingga jika terjadi perbedaan suhu akan
menghasilkan tegangan listrik yang variabel.
b. Sensor Radiasi Optik
Sensor optik adalah sensor yang dapat mendeteksi perubahan cahaya dari sumber
cahaya, pantulan cahaya ataupun bias cahaya yang mengenai benda atau ruangan.
Prinsip kerja dari sensor cahaya yaitu mengubah energi foton menjadi elektron.
Dimana 1 foton akan membangkitkan 1 elektron. Penggunaan sensor cahaya sangat
luas, yang paling populer dan sering digunakan adalah kamrea digital. Pada saat ini
juga sudah ada alat yang digunakan untuk mengukur cahaya yang mempunyai 1 buah
foton saja, sebagai contohnya yaitu photo cell, phototransistor, photodioda, photo
voltaik, photomultiplier, pyrometer optic.
c. Sensor Mekanik
Sensor mekanis yaitu sensor yang mendeteksi perubahan gerak mekanis, seperti
perpindahan atau pergeseran posisi, gerak lurus atau melingkar, tekanan, aliran, level
dan lain sebagainya. Prinsip kerja dari sensor mekanis yaitu mengubah besaran
mekanik menjadi sinyal-sinyal elektrik digital Contoh: Strain gauge, Linear Variabel
2.4.2.1 Tranduser Ultra Sonic
Sensor ultra sonic merupakan sensor yang bekerja dengan memanfaatkan gelombang
ultrasonic dengan cara memancarkan gelombang ultrasonik pada frekuensi 40 KHz
dan kemudian pantulan dari objek akan ditangkap oleh receiver sensor, dengan
demikian akan terjadi beda potensial pada kedua blok transmitter dan receiver. Beda
potensial inilah yang akan membangkitkan pulsa, sehingga lamanya pancaran dari
transmitter yang memantul pada objek dan tertangkap oleh receiver dapat
mengindikasi jarak suatu objek dari pangkal sensor.
2.4.2.2 Sensor Ultra Sonic Ping Parallax
Sensor ultrasonic digunakan untuk mengetahui jarak suatu objek dengan cara
memancarkan gelombang ultra sonic pendek, kemudian menunggu pantulan yang
dipancarkan tesebut kembali ke sensor. Pada perinsipnya pengendalian sensor ultra
sonic menggunakan mikrokontroller yaitu untuk mengeluarkan pulsa pemicu. Di
bagian Transmitter (Tx) gelombang pendek yang di pancarkan sebesar 40Khz akan
melalui udara kira – kira 1130 ft/S, membentur suatu objek dan kemudian kembali ke
sensor dengan diterima pada bagian Reciver (Rx). Sensor ultra sonic memiliki 3 kaki
(pin) yang berfungsi sebagai berikut:
a. Pin Ground
b. Pin supply
c. Pin Input dan Output
Gambar 2.5 Sensor Ultrasonik ping parallax
Spesifikasi sensor :
a. Kisaran pengukuran 3cm-3m.
c. Echo hold off 750uS dari fall of trigger pulse.
d. Delay before next measurement 200uS.
e. Burst indicator LED menampilkan aktifitas sensor.
Keluaran sensor ini yaitu sebuah pulsa (Frekwensi) yang berhubungan
langsung dengan waktu yang dibutuhkkan gelombang yang tepantul samapai
kebagiain Rx. Dengan mengukur waktu dari gelombang pantulan yang sampai ke
sensor ini maka jarak objek dapat dihitung. Sensor Ping mendeteksi jarak obyek
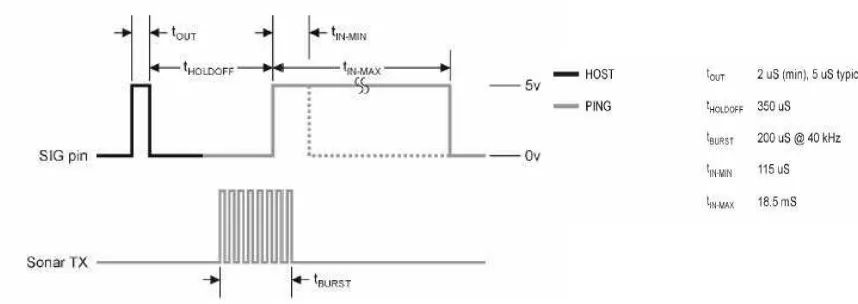
dengan cara memancarkan gelombang ultrasonik (40 kHz) selama tBURST (200 s)
kemudian mendeteksi pantulannya. Sensor Ping memancarkan gelombang ultrasonic
sesuai dengan kontrol dari mikrokontroler pengendali (pulsa trigger dengan tOUT min. 2 s). Gelombang ultrasonik ini melalui udara dengan kecepatan 344 meter per detik, mengenai obyek dan memantul kembali ke receiver sensor.
Untuk menghitung waktu yang dibutuhkan setiap 1cm pada gelombang
pantulan dapat dihitung dengan menggunakan rumus :
�
=
(���)�
...
(1)Dimana:
s = Jarak pantulan (m)
v = Kecepatan rambat gelombang ultra sonic pada udara (344 m/s)
t = waktu (s)
dihitung dengan membandingkan waktu pantulan (tp) dengan waktu per cm (t) lalu
dikalikan dengan 1cm.
Gambar 2.6 Diagram Waktu Sensor Ping
Sensor Ping mengeluarkan pulsa output high pada pin SIG setelah
memancarkan gelombang ultrasonik dan setelah gelombang pantulan terdeteksi Ping
akan membuat output low pada pin SIG. Lebar pulsa High (tIN) akan sesuai dengan
lama waktu tempuh gelombang ultrasonik untuk 2x jarak ukur dengan obyek. Maka
jarak yang diukur adalah :
=
� ∗344 /2 ...(2)
Gambar 2.7. Jarak Ukur Sensor Ping
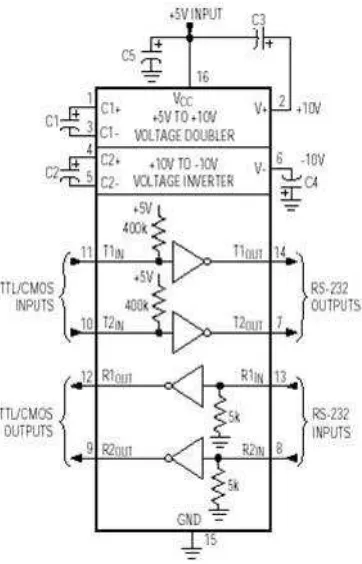
2.4.3 Max232
Untuk dapat berkomunikasi antara mikrokontroller dengan komputer, maka
diperlukan suatu penyetaraan level tegangan. Besarnya level tegangan komunikasi
+25 V untuk logika low (0). Hal ini sangat berbeda dengan level tegangan pada
mikrokontroller (Level Tegangan TTL/CMOS) dimana untuk logika high (1) level
tegangannya adalah 5 V dan untuk logika low (0) level tegangannya adalah 0 V. Oleh
karena itu diperlukan sebuah antarmuka yang dapat menyamakan level tegangan dari
komunikasi serial pada komputer dengan mikrokontroller, yaitu IC RS232 produksi
MAXIM yang disebut MAX232.
MAX232 adalah saluran driver/receiver ganda yang termasuk pembangkit
tegangan kapasitip yang menyediakan level tegangan RS232 dari sebuah sumber
tegangan 5V. Setiap receiver pada IC MAX232 ini mengkonversikan level tegangan
RS232 ke level tegangan TTL/CMOS sebesar 5 V. Dan setiap receiver ini mempunyai
ambang batas sebesar 1.3 V, dan histeresis sebesar 0.5 V, serta dapat menerima
masukan level tegangan ±30 V. Sedangkan untuk setiap driver pada IC MAX232 ini
mengkonversikan level tegangan masukan TTL/CMOS menjadi level tegangan
RS232.
2.4.4 Komunikasi Serial RS232
RS232 adalah standar komunikasi serial yang didefinisikan sebagai antarmuka antara
perangkat terminal data dan perangkat komunikasi data menggunakan pertukaran data
biner secara serial. Untuk melakukan komunikasi serial dengan standar RS232
digunakan IC Max 232 sebagai sebagai driver, yang akan mengkonversi tegangan atau
kondisi logika TTL dari hardware agar sesuai dengan tegangan pada komputer/
mikrokontroller ataupun sebaliknya sehingga data dapat dibaca.
Komunikasi RS-232 dilakukan secara asinkron (asynchronous), yaitu
komunikasi serial yang tidak memiliki clock bersama antara pengirim dan penerima,
masing-masing dari pengirim maupun penerima memiliki clock sendiri. Yang
dikirimkan dari pengirim ke penerima adalah data dengan baudrate tertentu yang
ditetapkan sebelum komunikasi berlangsung. Setiap word atau byte disinkronkan
dengan start bit, stop bit dan clock internal masing-masing pengirim atau penerima
data.
Gambar 2.9 Gelombang informasi untuk komunukasi serial
Data yang dikirimkan dengan cara seperti pada gambar 2.7 ini disebut data
yang terbingkai (to be framed) oleh start dan stop bit. Jika stop bit dalam keadaan
LOW, berarti telah terjadi framing error. Biasanya hal ini terjadi karena perbedaan
kecepatan komunikasi antara pengirim dengan penerima. Bentuk gelombang
komunikasi serial dengan 8-bit data, tanpa parity, 1 stop bit. Pada keadaan idle atau
menganggur, jalur RS-232 ditandai dengan mark state atau logika high. Pengiriman
data diawali dengan start bit yang berlogika 0 atau LOW, berikutnya data dikirimkan
bit per bit mulai dari LSB (Least Significant Bit) atau bit ke-0. Pengiriman setiap byte
diakhiri dengan stop bit yang berlogika HIGH.
Selanjutnya jika kondisi LOW setelah stop bit, ini adalah start bit yang
menandakan data berikutnya akan dikirimkan. Jika tidak ada lagi data yang ingin
disebut „break signal‟, yaitu keadaan LOW yang lamanya cukup untuk mengirimkan 8-bit data. Jika pengirim menyebabkan jalur komunikasi dalam keadaan seperti ini, penerima akan menganggap ini adalah „break signal‟ atau sinyal rusak. Secara ringkas, pengiriman data cukup dilakukan dengan mengisi register SBUF dengan data
yang akan dikirimkan, byte selanjutnya dikirim ketika bit TI berubah menjadi HIGH.
Sedangkan penerimaan ada cukup dilakukan dengan mengambil data dari SBUF
setelah bit RI menjadi HIGH.
Untuk menghubungkan RS232 dengan mikrokontroller dapat dilakukan dengan cara
mensinkronkan tegangan TTL antar device. Standar sinyal serial RS232 memiliki
ketentuan level tegangan sebagai berikut:
1. Logika „1‟ disebut „mark‟ terletak antara -3 volt hingga -25 volt.
2. Logika „0‟ disebut „space‟ terletak antara +3 volt hingga +25 volt.
3. Daerah tegangan antara -3 volt hingga +3 volt adalah invalid level, yaitu daerah
tegangan yang tidak memiliki level logika pasti sehingga harus dihindari.
Demikian juga level tegangan lebih negatif dari -25 volt atau lebih positif dari
+25 volt juga harus dihindari karena dapat merusak line driver pada saluran
RS232. Berikut konfigurasi dari RS232 (DB9-connector).
Keterangan mengenai fungsi saluran RS232 pada konektor DB9 adalah sebagai
berikut:
1. Receive Line signal detect, dengan saluran ini DCE (Data Circuit-Terminating
Equipment) memberitahukan ke DTE (Data Terminal Equipment) bahwa pada
terminal input mendeteksi adanya data yang masuk.
2. Receive Data, digunakan DTE menerima data dari DCE.
3. Transmit Data, digunakan DTE mengirimkan data ke DCE.
4. Data Terminal Ready, pada saluran ini DTE memberitahukan kesiapan
terminalnya.
5. Signal Ground, digunakan untuk saluran ground.
6. Ring Indicator, pada saluran ini DCE memberitahukan ke DTE bahwa sebuah
device menghendaki untuk berhubungan dengan sistem.
7. Clear To Send, dengan saluran ini DCE memberitahukan bahwa DTE dapat mulai
mengirimkan data.
8. Request To Send, dengan saluran ini DCE diminta untuk mengirim data oleh
DTE.
9. DCE Ready, sinyal aktif pada saluran ini menunjukkan bahwa DCE sudah dapat
digunakan.
2.5 Perangkat Lunak sistem
2.5.1 Bahasa Assembly
Secara fisik, kerja dari sebuah mikrokontroller dapat dijelaskan sebagai siklus
pembacaan intruksi bahasa mesin (Assembly) yang tersimpan di dalam memori.
Mikrokontroller menentukan alamat dari memori program yanng akan dibaca, dan
melakukan proses baca data di memori. Data yang dibaca diinterpretasikan sebagai
disebut sebagai program counter. Di sisi lain perbedaan bahasa assembly untuk
mikrokontroller yaitu seperti intruksi MOV untuk Byte pada pengalamatan bit
dikelompokkan sesuai dengan metode pengalamatan (addressing modes). Mode
pwngalamatan menjelaskan bagaimana operan dioprasikan. Berikut bentuk program
bahasa assembly sesara umum:
Bahasa yang digunakan untuk memprogram IC mikrokontroler AT89S51 adalah
bahasa assembly untuk MCS-51. angka 51 merupakan jumlah instruksi pada bahasa
ini hanya ada 51 instruksi. Dari 51 instruksi, yang sering digunakan orang hanya 10
instruksi. Instruksi –instruksi tersebut antara lain :
1. Instruksi MOV
Perintah ini merupakan perintah untuk mengisikan nilai ke alamat atau register
tertentu. Pengisian nilai dapat secara langsung atau tidak langsung.
Contoh : pengisian nilai secara langsung.
MOV R0,#20h
Perintah di atas berarti : isikan nilai 20 Heksadesimal ke register 0 (R0). Tanda #
sebelum bilangan menunjukkan bahwa bilangan tersebut adalah nilai.
Contoh pengisian nilai secara tidak langsung
MOV 20h,#80h
...
...
MOV R0,20h
Label Mnemonic Operan 1 operan 2 komentar
(isi memori) (opcode)
Perintah di atas berarti : isikan nilai yang terdapat pada alamat 20 Heksadesimal ke
register 0 (R0).Tanpa tanda # sebelum bilangan menunjukkan bahwa bilangan tersebut
adalah alamat.
2. Instruksi DJNZ
Decreament Jump If Not Zero (DJNZ) ini merupakan perintah untuk mengurangi nilai
register tertentu dengan 1 dan lompat jika hasil pengurangannya belum nol. Contoh ,
MOV R0,#80h
Loop: ...
...
DJNZ R0,Loop
...
R0 - 1, jika belum 0 lompat ke loop, jika R0 = 0 maka program akan meneruskan ke
perintah pada baris berikutnya.
3. Instruksi ACALL
Instruksi ini berfungsi untuk memanggil suatu rutin tertentu.
Contoh :
...
ACALL TUNDA
...
TUNDA:
...
4. Instruksi RET
Instruksi Return (RET) ini merupakan perintah untuk kembali ke rutin pemanggil
setelah instruksi ACALL dilaksanakan. Contoh,
ACALL TUNDA
TUNDA:
...
RET
5. Instruksi JMP (Jump)
Instruksi ini merupakan perintah untuk lompat ke alamat tertentu. Contoh:
Loop:
...
...
JMP Loop
6. InstruksiJB (Jump if bit)
Instruksi ini merupakan perintah untuk lompat ke alamat tertentu, jika pin yang
dimaksud berlogika high (1).
Contoh:
Loop:
JB P1.0,Loop
...
7. Instruksi JNB (Jump if Not bit)
Instruksi ini merupakan perintah untuk lompat ke alamat tertentu, jika pin yang
dimaksud berlogika Low (0).
Contoh:
Loop:
JNB P1.0,Loop
8. Instruksi CJNZ (Compare Jump If Not Equal)
Instruksi ini berfungsi untuk membandingkan nilai dalam suatu register dengan suatu
nilai tertentu.
Contoh:
Loop:
...
CJNE R0,#20h,Loop
...
Jika nilai R0 tidak sama dengan 20h, maka program akan lompat ke rutin Loop. Jika
nilai R0 sama dengan 20h,maka program akan melanjutkan instruksi selanjutnya.
9. InstruksiDEC(Decreament)
Instruksi ini merupakan perintah untuk mengurangi nilai register yang dimaksud
dengan 1.
Contoh:
MOV R0,#20h R0 = 20h
...
DEC R0 R0 = R0 – 1
...
10. InstruksiINC (Increament)
Instruksi ini merupakan perintah untuk menambahkan nilai register yang dimaksud
dengan 1.
Contoh:
MOV R0,#20h R0 = 20h
INC R0 R0 = R0 + 1
...
.
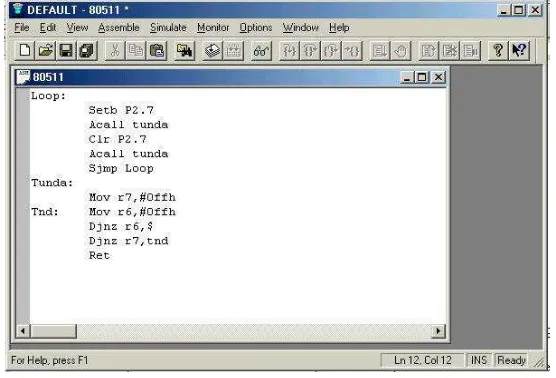
2.5.2 Software 8051 Editor, Assembler, Simulator (IDE)
Instruksi-instruksi yang merupakan bahasa assembly tersebut dituliskan pada sebuah
editor, yaitu 8051 Editor, Assembler, Simulator (IDE). Tampilannya seperti di bawah
ini.
Gambar 2.11 8051 Editor, Assembler, Simulator (IDE)
Setelah program selesai ditulis, kemudian di-save dan selanjutnya di-compile. Pada
saat di-compile akan tampil pesan peringatan dan kesalahan. Jika masih ada kesalahan
atau peringatan, itu berarti ada kesalahan dalam penulisan perintah atau ada nama
subrutin yang sama, sehingga harus diperbaiki terlebih dahulu sampai tidak ada pesan
kesalahan lagi.Software 8051IDE ini berfungsi untuk merubah program yang dibuat
di-converter ke dalam bilangan heksadesimal, proses perubahan ini terjadi pada saat
meng-compile program. Bilangan heksadesimal inilah yang akan di-download ke
2.5.3 Software Downloader
Untuk men-download bilangan-bilangan heksadesimal ini ke mikrokontroller
digunakan software ISP- Flash Programmer 3.0a berupa software open source
dandapat didownload dari internet. Tampilannya seperti gambar berikut ini.
Gambar 2.12 Tampilan software downloader
Cara menggunakannya adalah dengan meng-klik Open File untuk mengambil
file heksadesimal dari hasil kompilasi 8051IDE, kemudian klik Write untuk
mengisikan hasil kompilasi tersebut ke mikrokontroller.
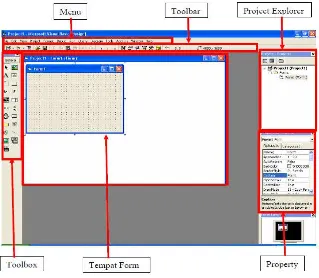
2.5.4 VISUAL BASIC 6.0
Pada projek system akuisisi data pada SCADA, Grapic User Interface (GUI) sangat
diperlukan sebagai antar muka keluaran data output objek yang dikontrol. Rancang
bangun dari interfacing dapat dibangun menggunakan Microsoft Visual Basic 6.0. Microsoft Visual Basic merupakan sebuah bahasa pemrograman yang
menawarkan Integrated Development Environment (IDE) untuk membuat program
perangkat lunak berbasis sistem operasi Microsoft Windows dengan menggunakan
BASIC dan menawarkan pengembangan perangkat lunak komputer berbasis GUI.
Visual Basic 6.0 adalah perkembangan dari versi sebelumnya dengan beberapa
penambahan komponen yang sedang tren saat ini, seperti kemampuan pemrograman
internet dengan DHTML (Dynamic HyperText Mark Language), dan beberapa
penambahan fitur database dan multimedia yang semakin baik. Sampai saat buku ini
ditulis bisa dikatakan bahwa Visual Basic 6.0 masih merupakan pilih pertama di
dalam membuat program aplikasi yang ada di pasar perangkat lunak nasional. Hal ini
disebabkan oleh kemudahan dalam melakukan proses development dari aplikasi yang
dibuat. Interface antar muka Visual Basic 6.0, berisi menu, toolbar, toolbox, form,
project explorer dan property seperti terlihat pada gambar berikut:
Gambar 2.13 Interface antar muka Visual Basic 6.0
2.5.4.1 Konsep Dasar Pemrograman Dalam Visual Basic 6.0
Konsep dasar pemrograman Visual Basic 6.0, adalah pembuatan form dengan
a. Property
Setiap komponen di dalam pemrograman Visual Basic dapat diatur propertinya sesuai
dengan kebutuhan aplikasi. Property yang tidak boleh dilupakan pada setiap komponen adalah “Name”, yang berarti nama variabel (komponen) yang akan digunakan dalam scripting. Properti “Name” ini hanya bisa diatur melalui jendela Property, sedangkan nilai peroperti yang lain bisa diatur melalui script seperti
Command1.Caption=”Play” Text1.Text=”Visual Basic” Label1.Visible=False
Timer1.Enable=True
b. Metode
Bahwa jalannya program dapat diatur sesuai aplikasi dengan menggunakan metode
pemrograman yang diatur sebagai aksi dari setiap komponen. Metode inilah tempat untuk
mengekpresikan logika pemrograman dari pembuatan suatu prgram aplikasi.
c. Event
Setiap komponen dapat beraksi melalui event, seperti event click pada command button
yang tertulis dalam layar script Command1_Click, atau event Mouse Down pada picture
yang tertulis dengan Picture1_MouseDown. Pengaturan event dalam setiap komponen
yang akan menjalankan semua metode yang dibuat.
2.6 Flow Chart
Flowchart adalah bagan (chart) yang menggambarkan aliran (Flow) dan digambarkan
dengan simbol-simbol grafis bertujuan untuk menggambarkan arus data dari program,
sehingga memudahkan untuk merancang program aplikasi. Simbol-simbol yang
Tabel 2.1 Simbol-simbol Flowchart program
Simbol Nama Keterangan Fungsi
TERMINATOR Permulaan / akhir program
GARIS ALIR
(FLOW LINE) Arah aliran program
PREPARATION Proses inilisasi/pemberian harga awal
PROCESS Proses pengolahan data
INPUT / OUTPUT DATA
proses input/output data, prameter, informasi
PREDEFINED PROCESS (SUB-PROGRAM)
Permulaan sub program/proses menjalankan sub program
Decision Perbandingan pernyataan, seleksi kondisi
2.6.1 Data Flow Diagram (DFD)
Data flow diagram adalah alat pembuatan model network dengan menggunakan
notasi-notasi untuk menggambarkan arus dari data sistem yang bertujuan untuk
membantu memahami sistem secara logika, terstruktur dan jelas. Adapun
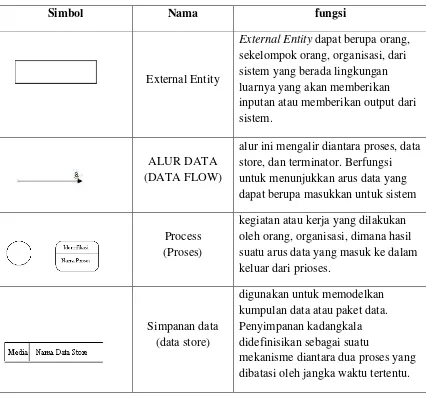
Tabel 2.2 Simbol-simbol Data Flaw Diagram
Simbol Nama fungsi
External Entity
External Entity dapat berupa orang,
sekelompok orang, organisasi, dari sistem yang berada lingkungan luarnya yang akan memberikan inputan atau memberikan output dari sistem.
ALUR DATA (DATA FLOW)
alur ini mengalir diantara proses, data store, dan terminator. Berfungsi untuk menunjukkan arus data yang dapat berupa masukkan untuk sistem
Process (Proses)
kegiatan atau kerja yang dilakukan oleh orang, organisasi, dimana hasil suatu arus data yang masuk ke dalam keluar dari prioses.
Simpanan data (data store)
digunakan untuk memodelkan kumpulan data atau paket data. Penyimpanan kadangkala didefinisikan sebagai suatu
mekanisme diantara dua proses yang dibatasi oleh jangka waktu tertentu.
Tahapan diagram arus data dibagi dalam beberapa bagian yaiu:
1. Diagram Koteks
Diagram ini berisi gambaran umum (secara garis besar) sistem yang akan dibuat. Secara kalimat, dapat dikatakan bahwa diagram konteks ini berisi “siapa saja yang memberi data (dan data apa saja) ke sistem, serta kepada siapa saja informasi (dan
informasi apa saja) yang harus dihasilkan sistem.
2. Diagram nol
Diagram nol memberikan pandangan menyeluruh mengenai system yang di tangani
BAB 3
ANALISIS DAN PERANCANGAN
3.1 Perancangan Hardware
3.1.1 Diagram Blok
Secara garis besar, diagram blok dari rangkaian projek Tugas Akhir ini terdiri dari 2
blok besar dengan keseluruhan memiliki 7 bagian. Diagram blok rangkaian dapat
ditunjukkan pada gambar 3.1 berikut ini:
SENSOR
Gambar 3.1 Diagram Blok Sistem Pendeteksi Banjir
3.1.2 Prinsip kerja Diagram Blok
Pada keadaan awal sistem diaktifkan, dimana proyek tugas akhir ini penulis
menggunakan sensor ultra sonic ping Parallax sebagai pengukur besaran tinggi
permukaan air. Ketika sensor ultra sonik Ping Parallax bekerja dengan mengeluarkan
gelombang ultra sonik dan mengenai objek serta mendeteksi pantulannya, maka
sensor akan mengeluarkan frekwensi tertentu terhadap besaran jarak tertentu.
Dikarenakan sensor sudah mengeluarkan tegangan digital, maka selanjutnya data
sudah dapat diteruskan ke pusat pengolahan data yaitu mikrokontroller
mikrokontroller AT89S51 (mikrikontroller 1) data yang didapat dari pengukuran akan
dikirimkan melalui infrared sebagai media pengiriman data nirkabel (wireless).
Data yang dikirimkan melalui media infrared akan dideteksi oleh penerima
infrared yaitu modul TSOP 1738. Data yang telah diterima akan diteruskan ke
mikrokontroller AT89S51 (mikrikontroller 2) untuk membandingkan data.
Selanjutnya data yang telah di bandingkan akan dikirim ke PC melelui modul RS 232
untuk menampilkan data pengukuran yang telah di dapat.
3.1.3 Perancangan Sensor
Sensor ultrasonic merupakan sensor yang memanfaatkan gelombang ultra sonic
sebagai device yang akan mengukur ketinggian muka air. Pada kenyataannya suatu
gelombang dapat terserep atau terbias pada benda-benda yang transparan seperti pada
air ataupun kaca. Untuk dapat menempatkan sensor ini, sehingga dapat bekerja secara
efisien, maka dapat diperhatikan untuk benda penghalang yang tidak dapat menyerap
atau membiaskan gelombang ultrasonik sehingga gelombang dapat terpantul
sempurna pada modul receiver sensor.
Output sensor ultrasonic yaitu berupa frekwensi yang mempresentasikan
lamanya waktu pantulan yang terjadi dari mulai gelombang dipancarkan hingga
diterima pada modul penerima sensor. Pada pin SIG ini akakn di sambungkan pada
port I/O pada mikrokontroller. Sementara masukan pada pin VCC tegangan untuk
dapat mengoprasikan tegangan ini yaitu sebasar 5V yang di dapat dari Power Supply
sebagai sumber tegangan . pin GND merupakan grounding yang akan disambungkakn
pada kutub negatif power supply. Secara keseluruhan sensor ultrasonic ini dirancang
dapat dilihat pada gambar 3.2 .
VCC
To PIN I/O Microkontroller
Dikarenakan pin input dan output sensor (SIG) merupakan satu-satunya media
yang dapat mengaktifkan rangkaian sensor maupun sebagai media data out yang akan
menjadi input pada mikrokontroller (1), maka dibutuhkanlah sebuah sparete worker
yaitu berupa rangkaian driver yang dapat mengaktifkan sensor untuk mengukur dan
mengeluarkan data dikala sensor telah selesai mengukur ketinggian. Pada perancangan
driver sensor ultrasonik, keluaran sensor akan dimodifikasi sehingga input pada
mikrokontroller (1) hanya berupa tegangan high (1) dan low (0). Berikut gambar
rangkaian driver untuk sensor ultra sonik pada gambar 3.3 .
Gambar 3.3 Driver sensor ultra sonic ping
Pada rangkin driver transistor jenis NPN merupakan drain tegangan yang akan
aktif jika diberi tegangan lebih besar dari 0,9V. Mikrokontroller (1) akan
mengaktifkan sensor untuk mengukur dengan cara memberikan logika high (1) pada
pin 1.1 sehingga sensor dapat aktif untuk melakukan pengukuran, dan sebaliknya jika
pin 1.1 diberi logika low (0) maka pin 1.0 akan berlogika high (1) sehingga membuat
transistor akan aktif sehingga data hasil pengukuran dapat diterima. Fungsi resistor
pada rangkaian adalah sebagai tahanan arus yang masuk ataupun yang keluar dari
sensor, sehingga rangkaian tidak mengalami over current yang dapat merusak sensor
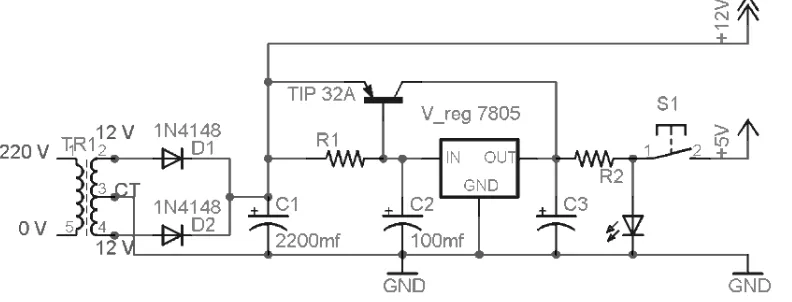
3.1.4 Perncangan Power Supply (PSA)
Rangkaian PSA ini berfungsi untuk mensupplay tegangan ke seluruh rangkaian yang
ada. Dikarenakan beberapa rangkaian memerlukan 2 besaran tegangan, maka PSA
yang dibuat terdiri dari dua keluaran, yaitu 5 volt dan 12 volt, keluaran 5 volt
digunakan untuk mensupplay tegangan ke seluruh rangkaian. Rangkaian power
supplay ditunjukkan pada gambar 3.2 berikut ini :
Gambar 3.4 Rangkaian Power Supplay (PSA)
Trafo CT adalah trafo stepdown yang berfungsi untuk menurunkan tegangan
dari 220 volt AC (arus bolak-balik) menjadi 12 volt AC (arus searah). Kemudian 12
volt AC akan disearahkan dengan menggunakan dua buah dioda, selanjutnya 12 volt
DC akan diratakan oleh kapasitor 2200 F. Regulator tegangan 5 volt (LM7805CT)
digunakan untuk keluaran yang dihasilkan setabil pada 5 volt walaupun terjadi
perubahan pada tegangan masukannya, sementara LED hanya berfungsi sebagai
indikator apabila PSA diaktifkan. Transistor PNP TIP 32 disini berfungsi untuk
mensupplay arus apabila terjadi kekurangan arus pada rangkaian, sehingga regulator
tegangan (LM7805CT) tidak akan panas ketika rangkaian butuh arus yang cukup
besar. Tegangan 12 volt DC langsung diambil dari keluaran 2 buah dioda penyearah.
3.1.5 Perancangan Rangkaian Mikrokontroler AT89S51
Untuk dapat mengendalikan rangkaian yang mandiri diperlukan device yang dapat
menghitung, mengingat, dan mengambil pilihan serta digunakan sebagai pemrosesan
digital. Minimum sistem dari Rangkaian mikrokontroler ditunjukkan pada gambar
berikut ini:
Gambar.3.5 Rangkaian mikrokontroller AT89S51
Pin 31 External Access Enable (EA) diset high (H). Ini dilakukan karena
mikrokontroller AT89S51 tidak menggunakan memori eskternal. Pin 18 dan 19
dihubungkan ke XTAL 12 MHz dan capasitor 33 pF. XTAL ini akan mempengaruhi
kecepatan mikrokontroller AT89S51. dalam mengeksekusi setiap perintah dalam
tinggi akan me-reset mikrokontroller ini. Pin 32 sampai 39 adalah Port 0 yang
merupakan saluran/bus I/O 8 bit open collector dapat juga digunakan sebagai
multipleks bus alamat rendah dan bus data selama adanya akses ke memori program
eksternal. Pada port 0 ini masing masing pin dihubungkan dengan resistor 4k7 ohm.
Resistor 4k7 ohm yang dihubungkan ke port 0 befungsi sebagai pull up ( penaik
tegangan ). Pin 1 sampai 8 adalah port 1. Pin 21 sampai 28 adalah port 2. Dan Pin 10
sampai 17 adalah port 3.. Pin 20 merupakan ground dihubungkan dengan ground pada
power supplay. Pin 40 merupakan sumber tegangan positif dihubungkan dengan + 5
volt dari power supplay.
Mikrokontroller AT89S51 memerlukan 12 clock untuk mengeksekusi 1 siklus
perintah pada rangkaian. Hal ini diakibatkan karena mikrokontroller menggunakkan
kristal yang besarnya 12 MHz, sehingga waktu yang dibutuhkan mengeksekusi 1
siklus mesin tersebut membutuhkakn waktu =12� ��
12MHz = 1mikrodetik.
3.1.6 Perancangan rangkaian Pengirim Data Melalui Infra Merah
Data yang telah diproses pada mikrokontroller AT89S51 (mikrokontroller 1) akan
dikirimkan melalui media transmisi data secara wireless yaitu dengan memanfaatkan
LED infra merah sebagai jalur nirkabel. Rangkaian pemancar infra merah dapat dilihat
pada gambar 3.6 berikut: