BAB I
PENDAHULUAN
Dalam BAB I ini berisi Latar Belakang beserta Tujuan Praktikum. Berikut isi dari BAB I :
1.1 Latar Belakang
Dalam pembahasan Ergonomi, untuk mencapai tingkat kenyamanan manusia dalam pekerjaan, dihitung dan diukur untuk mencapai apa yang diinginkan untuk tingkat kenyamanan dalam pekerjaaan. Salah satu contoh konsep dasar biomekanika. Biomekanika dapat menjelaskan karakteristik, perilaku, dan respon sistem biologi tubuh secara mekanik.
Biomekanik adalah penggunaan konsep hokum-hukum fisika dan rekayasa untuk menggambarkan gerakan yang dialami oleh berbagai segmen tubuh dan gaya yang bekerja pada masing-masing bagian tubuh selama aktivitas sehari-hari. Dalam dunia industri biomekanika sering disebut secara khusus sebagai biomekanika kerja (occupational biomechanics). Biomekanika kerja sebagai ilmu yang mempelajari interaksi fisik antara manusia dengan mesin perkakas dan material yang digunakannya selama bekerja dalam rangka mengurangi resiko terjadinya keluhan dan meningkatkan performansi kerjanya (Chaffin dan Anderson, 1991)
Dalam praktikum modul 3 praktikan menghitung AL, MPL, RWL, dan LI dan mengukur seberapa panjang jarak beban kerja dengan manusia yang dilakukan dalam bekerja sehari-hari, sehingga praktikan bisa mengetahui permasalahan dalam bekerja dan juga mengetahui permasalahan pekerja dengan mesin.
1.2 Tujuan Praktikum
Dibawah ini tujuan praktikum modul 3 adalah :
a) Mampu menghitung besar gaya dan momen pada setiap segmen tubuh manusia saat dilakukan pengangkat beban.
b) Mampu menghitung besarnya gaya kompresi pada disc yang terletak lumbar ke-5 (L5) dan sacrum ke-1 (s1).
c) Mampu menganalisa postur kerja dengan metode REBA. d) Mampu menghitung besaran AL, MPL, RWL, LI.
BAB II
METODE PENELITIAN
2.1 Alat dan Bahan PercobaanDibawah ini alat dan bahan percobaan dalam praktikum modul 3 sebagai
5. Kamera (minimal 5 Mp)
6. Stopwatch
7. Meja Kerja
8. Lembar Pengamatan 9. Nampan
B. Bahan Percobaan
1. RWL (RecommendedWeightLimit) 2. LI (LiftingIndex)
3. AL (ActionLimit)
4. MPL (MaximumPermissibleLimit)
2.2 Subjek Percobaan
Berikut subjek operator pada saat praktikum : Nama Operator : Johan Pratama
Jenis Kelamin : Laki-laki Tinggi Badan : 162 cm Berat Badan : 50 kg Berat Beban : 10 kg
Uraian posisi yang didapatkan :
Posisi pertama mendapatkan posisi nomor 6, yaitu posisi berdiri – punggung membungkuk dengan beban didepan dada, kaki lurus.
Posisi kedua mendapatkan posisi nomor 7, yaitu posisi berdiri dengan punggung tegak dengan beban didepan perut.
2.3 Prosedur Percobaan
Berikut perosedur percobaan praktikum modul 3 :
a) Percobaan untuk analisi gaya dan momen serta AL dan MPL. 1. Menyiapkan beban dengan berat 10 kg.
2. Melakukan percobaan mengangkat beban dengan 2 postur tubuh berbeda diantar postur-postur berikut ini :
1) Berjongkok - punggung tegak dengan beban diatas lantai. 2) Berjongkok – punggung tegak dengan beban didepan dada.
3) Berdiri – kaki menekuk – punggung tegak dengan beban didepan dada.
6) Berdiri – punggung membengkuk dengan beban didepan dada.
7) Berdiri tegak lurus siap meletakkan beban diatas meja (beban lebih jauh didepan dada)
8) Berdiri membungkuk siap meletakkan beban di atas meja (beban lebih jauh didepan dada)
3. Ambil gambar operator pada setiap postur saat sedang mengangkat beban.
4. Melakukan pencatatan atau perhitungan data-data yang diperlukan untuk analisis gaya dan momen serta Action Limit (AL) dan Maximum Permisible Limit (MPL), seperti :
a) Berat badan.
b) Jarak sumbu pikul ke pusat massa beban.
c) Sudut inklinasi badan terhadap relatif terhadap horizontal. d) Sudut inklinasi kaki terhadap horizontal.
e) Berat badan yang ditanggung (diatas) disc L5/S1 f) Luas diafragma perut
g) Jarak dari gaya perut ke L5/S1
h) Jarak dari otot spinal erector ke L5/S1, dll. b) Percobaan untuk perhitungan RWL dan LI.
1. Menyiapkan beban dengan berat 10 kg, dengan perbedaan pengankatan baik dan tidak baik.
2. Memilih dua kombinasi dari faktor-faktor yang terdapat pada table 3.3.
3. Melakukan percobaan, seorang operator memindahkan beban dari posisi awal keposisi akhir sebanyak 10 kali angkatan.
4. Mengambil gambar operator pada setiap postur saat mengangkat beban, yaitu : 1) Saat mulai mengangkat beban diposisi awal beban
2) Sedang mengangkat beban.
3) Saat meletakkan beban diposisi akhir beban.
5. melakukan pencatatan data-data yang diperlukan untuk menghitung RWL dan LI, seperti :
a) berat beban
b) jarak horizontal beban dari operator pada posisi awal c) jarak horizontal beban dari operator pada posisi akhir. d) Jarak vertikal beban dari lantai pada posisi awal e) Jarak vertikal beban dari lantai pada posisi akhir
f) Sudut asimetri yang terbentuk selama memindahkan beban g) Kategori pegangan
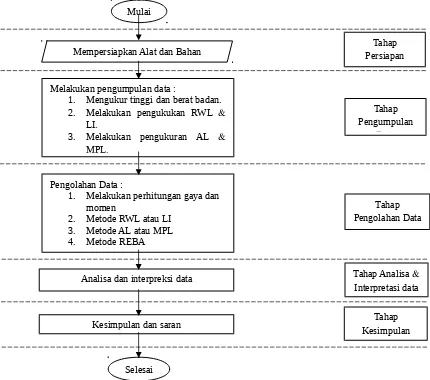
2.4 Flowchart Prosedur Praktikum
Gambar 3.2.x Berikut adalah flowchart prosedur praktikum modul 3:
Gambar. 3.2.1 Flowchart praktikum modul 3 Mulai
1. Mengukur tinggi dan berat badan. 2. Melakukan pengukukan RWL
LI.
3. Melakukan pengukuran AL MPL.
Pengolahan Data :
1. Melakukan perhitungan gaya dan momen
BAB III
PENGUMPULAN DAN PENGOLAHAN DATA
3.1 Pengumpulan Data
Berikut merupakan kumpulan data yang telah dilakukan setelah melaksanakan praktikum.
3.1.1 Data Tinggi dan Berat Badan Operator
Tabel 3.3.1 berikut merupakan data tinggi dan berat badan operator. Tabel 3.3.1 Data tinggi dan berat kelompok
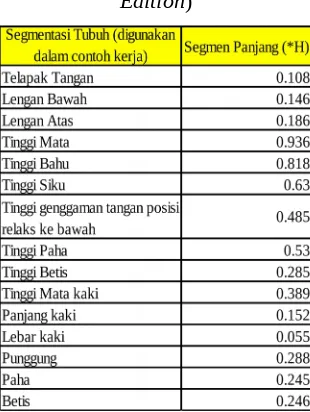
3.1.2 Data Segmen Panjang dan Segmen Berat
Tabel 3.3.2 berikut merupakan data panjang segmen tubuh. Tabel 3.3.2 Panjang segmen tubuh
(Sumber: Chaffin. D. B. dan Anderson, G.B.J., 1991 Occupational Biomechanics, Edition)
Tabel 3.3.3 berikut merupakan data berat segmen tubuh. Tabel 3.3.3 Berat SegmenTubuh
(Sumber: Tayyaari F, dan Smith, J. L., 1997 Occupational Ergonomics: Prinsiples and Applications)
Dimana: *W = total berat badan (Kg).
Tabel 3.3.4 berikut merupakan pusat massa tubuh. Tabel 3.3.4 Pusat Massa Tubuh
(Sumber: Tayyari F, dan Smith, J. L., 1997 Occupational Ergonomics: Prinsiples and Applications)
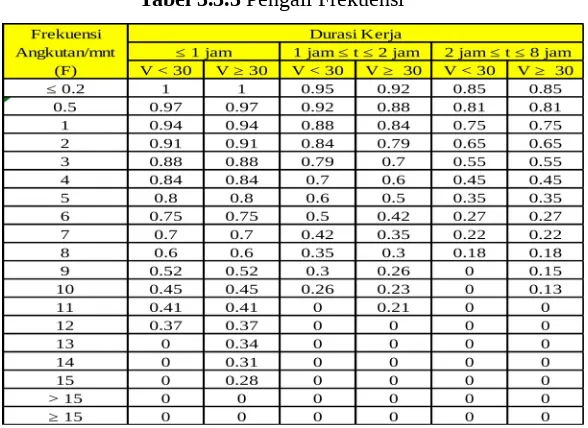
3.1.3 Data Pengali Frekuensi dan Kopling
Keterangan:
Untuk frekuensi pengangkatan kurang atau hanya 1 kali dalam 5 menit ditetapkan yaitu F = 2 Lift/menit.
Tabel 3.3.6 berikut merupakan data pengali kopling. Tabel 3.3.6 Tabel Pengali Kopling
3.1.4 Data Faktor Level AL dan RWL
Tabel 3.3.7 berikut merupakan data faktor AL. Tabel 3.3.7 Faktor Level AL
Tabel 3.3.8 berikut merupakan data faktor RWL. Tabel 3.3.8 Faktor Level RWL
3.2 Pengolahan data
Biomekanika adalah rentang postur atau posisi aktifitas kerja, ukuran beban, dan ukuran manusia yang dievaluasi. Sedangkan kriteria keselamatan adalah berdasar pada beban tekan (compression load) pada intebral disk antara Lumbar nomor lima dan
sacrum nomor satu (L5/S1) (Hasibuan, 2012). 3.2.1 Gaya dan momen pada setiap segmen tubuh
3.2.1.1 Posisi 6
Gambar 3.3.2 segmen tubuh pada posisi 6
Tabel 3.3.9 Data segmen tubuh posisi 6
1. Telapak Tangan
Gambar 3.3.4 gaya yang bekerja pada telapak tangan posisi 6 Diketahui :
= gaya berat benda (N)
= gaya berat yang diterima tangan (N)
= resultan gaya (y) pada tangan (N)
= resultan momen pada tangan (Nm)
= panjang tangan (m)
θ = sudut inklinasi tangan relatif terhadap horizontal
Diketahui : W0 = mo x g
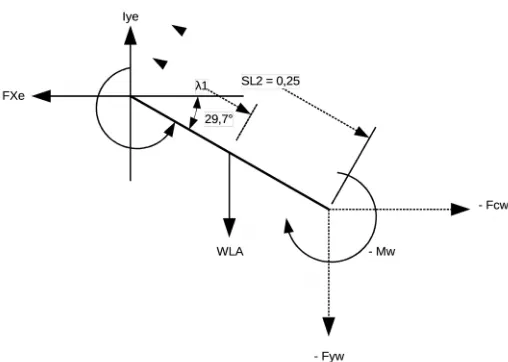
2. Lengan Bawah
Gambar 3.3.5 gaya yang bekerja pada lengan bawah posisi 6
Diketahui: = gaya berat yang diterima lengan bawah (N)
= resultan gaya (y) pada lengan bawah (N)
= resultan gaya (y) pada pergelangan lengan (N)
= resultan momen pada pergelangan lengan ( )
= resultan momen pada lengan bawah ( )
SL2 = panjang lengan bawah (m)
λ2 = proporsi jarak pusat massa ke siku
θ2 = sudut inklinasi lengan bawah relatif terhadap horizontal
= 29.7°
cos = 0.87
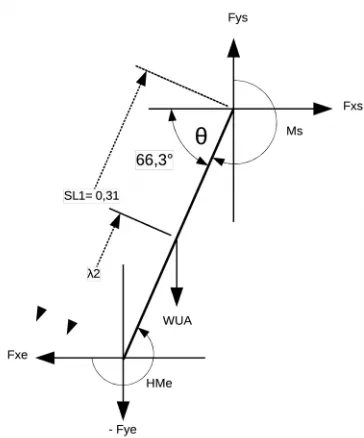
Gambar 3.3.6 gaya yang bekerja pada lengan atas posisi 6
Diketahui: = gaya berat yang diterima lengan atas (N)
= resultan gaya (y) pada lengan atas ( )
= resultan momen pada lengan atas ( ) SL3 = panjang lengan atas (m)
λ3 = proporsi jarak pusat massa ke bahu
θ3 = sudut inklinasi lengan atas relatif terhadap horizontal
= 66.3°
cos = 0.40
λ3 = 56.40% SL3 = 0.31 m Fye = 61.5 N ME = 19.33 Nm
∑Fx = 0 tidak ada gaya horizontal
WUA = 2.8% x Wbadan WUA = 2.8% x 500 N WUA = 14 N
Fys-Fye-WUA =0 Fys=Fye+WUA Fys=61.5 N + 14 N Fys=75.5 N
∑M=0
MS-ME –[WUA x ( λ3 x SL3 ) x cos ] – [ Fye x SL3 x cos ] = 0
MS-ME –[WUA x ( λ3 x SL3 ) x cos 66.3°] – [ Fye x SL3 x cos 66.3°] = 0
MS=19.33 Nm +[14 N x ( 56.40% x 0.31 m ) x 0.40] + [ 61.5 N x 0.31 m x 0.40]
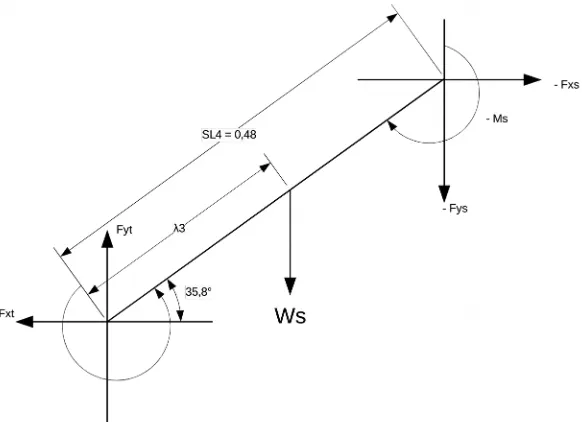
4. Punggung
Gambar 3.3.7 gaya yang bekerja pada punggung posisi 6 Diketahui: = gaya berat yang diterima punggung (N)
= resultan gaya (y) pada punggung ( )
= resultan momen pada punggung ( ) SL4 = panjang punggung (m)
λ4 = proporsi jarak pusat massa ke L5/S1
θ4 = sudut inklinasi punggung relatif terhadap horizontal
= 35.8°
cos = 0.81
∑Fx = 0 tidak ada gaya horizontal
WT = 50% x Wbadan WT = 50% x 500 N WT = 250 N
∑Fy = 0 Fyt-Fys-WT=0 Fyt=Fys+WT
Fyt=75.5 N+250 N Fyt=325.5 N ∑M = 0
MT-2MS - [ WT x(λ4 x SL4 ) x cos ] – [2Fys x SL4 x cos ]=0
MT-2MS - [ WT x(λ4 x SL4 ) x cos 35.8°] – [2Fys x SL4 x cos 35.8°]=0
MT= 2 x 27.94 Nm + [ 250 Nx(39.60% x 0.48 m ) x 0.81] + [2 x 75.5 N x 0.48 m x 0.81]
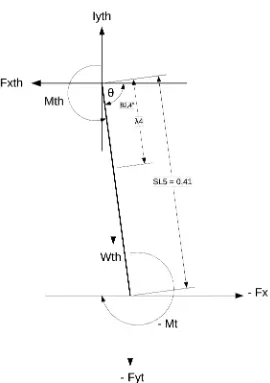
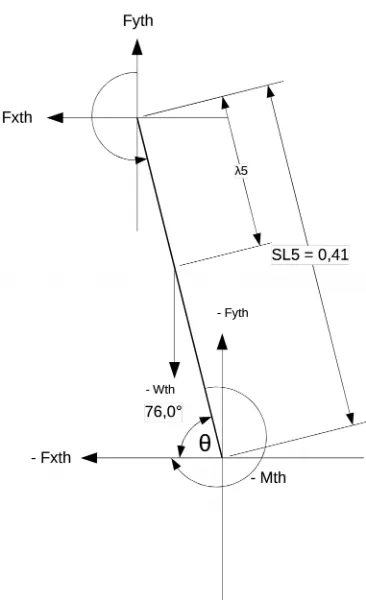
5. Paha
Gambar 3.3.8 gaya yang bekerja pada paha posisi 6
Diketahui: = gaya berat yang diterima paha (N)
= resultan gaya (y) pada paha ( )
= resultan momen pada paha ( )
SL5 = panjang paha (m)
λ5 = proporsi jarak pusat massa ke paha
θ5 = sudut inklinasi paha relatif terhadap horizontal
= 82.4°
λ5 = 56.70% SL5 = 0.41 m Fyt = 325.5 N MT = 153.08 Nm
∑Fx=0 tidak ada gaya horizontal
WTH= 10% x 500 N WTH= 50 N
∑Fy=0
FyTH-FyT-WTH=0 FyTH=325.5 N +50 N FyTH=375.5 N
∑M=0
MTH -1/2 MT – [ WTH x (λ5 x SL5) x cos ]-[1/2 FyTH x SL5 x cos ] =0
MTH -1/2 MT – [ WTH x (λ5 x SL5) x cos 82.4°]-[1/2 FyTH x SL5 x cos 82.4°] =0 MTH=1/2 x 153.08 Nm + [ 50 N x ( 56.70% x 0.41 m) x 0.13]+[(1/2 x 375.5 N) x 0.41 m x 0.13]
6. Betis
Gambar 3.3.9 gaya yang bekerja pada betis posisi 6
Diketahui: = gaya berat yang diterima betis (N)
= resultan gaya (y) pada betis ( )
= resultan momen pada betis ( )
SL6 = panjang betis (m)
λ6 = proporsi jarak pusat massa ke betis
θ6 = sudut inklinasi betis relatif terhadap horizontal
= 76°
cos = 0.24
MTH = 88.06
Gambar 3.3.10 gaya yang bekerja pada kaki posisi 6
Diketahui: = gaya berat yang diterima kaki (N)
= resultan gaya (y) pada kaki ( )
SL7 = panjang kaki (m)
λ7 = proporsi jarak pusat massa ke kaki
θ7 = sudut inklinasi kaki relatif terhadap horizontal
3.2.1.2 Posisi 7
Gambar 3.3.11 posisi 7
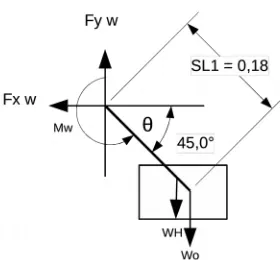
1. Telapak Tangan
Gambar 3.3.12 gaya yang bekerja pada telapak tangan posisi 7
Diketahui : = gaya berat benda (N)
= gaya berat yang diterima tangan (N)
= resultan gaya (y) pada tangan (N)
= resultan momen pada tangan (Nm)
= panjang tangan (m)
θ = sudut inklinasi tangan relatif terhadap horizontal
WH= 3 N ∑Fy=0
Fyw-W0/2-WH=0 Fyw = W0/2 +WH Fyw = 100/2 N + 3 N Fyw = 53 N
∑M=0
Mw-[(W0/2+WH)xSL1 x cos ]=0
Mw=[(100 N/2+3 N)x 0.18 m x 0.71] Mw=[53 N x 0.18 m x 0.71]
Mw=[9.54 N x 0.71 m] Mw=6.75 Nm
2. Lengan Bawah
Gambar 3.3.13 gaya yang bekerja pada lengan bawah posisi 7
Diketahui: = gaya berat yang diterima lengan bawah (N)
= resultan gaya (y) pada lengan bawah (N)
= resultan gaya (y) pada pergelangan lengan (N)
= resultan momenpadalenganbawah ( )
SL2 = panjang lengan bawah (m)
λ2 = proporsi jarak pusat massa ke siku
θ2 = sudut inklinasi lengan bawah relatif terhadap horizontal
3. Lengan Atas
Gambar 3.3.14 gaya yang bekerja pada lengan atas posisi 7
Diketahui: = gaya berat yang diterima lengan atas (N)
= resultan gaya (y) pada lengan atas ( )
= resultan momen pada lengan atas ( ) SL3 = panjang lengan atas (m)
λ3 = proporsi jarak pusat massa ke bahu
θ3 = sudut inklinasi lengan atas relatif terhadap horizontal
= 75.4°
cos = 0.25
λ3 = 56.40% SL3 = 0.31 m Fye = 61.5 N ME = 13.26 Nm
∑Fx = 0 tidak ada gaya horizontal
WUA = 14 N ∑Fy=0
Fys-Fye-WUA =0 Fys=Fye+WUA Fys=61.5 N + 14 N Fys=75.5 N
∑M=0
MS-ME –[WUA x ( λ3 x SL3 ) x cos ] – [ Fye x SL3 x cos ] = 0
MS-ME –[WUA x ( λ3 x SL3 ) x cos 75.4°] – [ Fye x SL3 x cos 75.4°] = 0
MS=13.26 Nm +[14 N x ( 56.40%x 0.31 m ) x 0.25] + [ 61.5 N x 0.31 m x 0.25] MS=13.26 Nm +0.61 Nm + 4.77 Nm
4. Punggung
Gambar 3.3.15 gaya yang bekerja pada punggung posisi 7
Diketahui: = gaya berat yang diterima punggung (N)
= resultan gaya (y) pada punggung ( )
= resultan momen pada punggung ( ) SL4 = panjang punggung (m)
λ4 = proporsi jarak pusat massa ke L5/S1
θ4 = sudut inklinasi punggung relatif terhadap horizontal
= 90°
cos = 0
∑Fx = 0
WT = 50% x Wbadan WT = 50% x 500 N WT = 250 N
∑Fy = 0 Fyt-Fys-WT=0 Fyt=Fys+WT
Fyt=75.5 N+250 N Fyt=325.5 N
∑M = 0
MT-2MS - [ WT x(λ4 x SL4 ) x cos ] – [2Fys x SL4 x cos ]=0
MT=2 x (18.64 Nm ) Nm+ [ 250x(39.60% x 0.48 ) x 0] + [2 x 75.5 x 0.48 m x 0]
5. Paha
Gambar 3.3.16 gaya yang bekerja pada paha posisi 7
Diketahui: = gaya berat yang diterima paha (N)
= resultan gaya (y) pada paha ( )
= resultan momen pada paha ( )
SL5 = panjang paha (m)
λ5 = proporsi jarak pusat massa ke paha
θ5 = sudut inklinasi paha relatif terhadap horizontal
= 83.8°
cos = 0.11
∑Fx=0 tidak ada gaya horizontal
WTH= 10% x 500 N WTH= 50 N
∑Fy=0
FyTH-FyT-WTH=0 FyTH=325.5 N +50 N FyTH=375.5 N
∑M=0
MTH -1/2 MT – [ WTH x (λ5 x SL5) x cos ]-[1/2 FyTH x SL5 x cos ] =0
MTH=1/2 x (37.28) Nm+ [ 50 N x ( 56.70% x 0.41 m ) x 0.11]+[1/2 x 375.5 N x 0.41 m x 0.11]
MTH= 18.64 Nm+ 1.28 Nm + 8.47 Nm MTH= 28.39 Nm
Gambar 3.3.17 gaya yang bekerja pada betis posisi 7
Diketahui: = gaya berat yang diterima betis (N)
= resultan gaya (y) pada betis ( )
= resultan momen pada betis ( )
SL6 = panjang betis (m)
λ6 = proporsi jarak pusat massa ke betis
θ6 = sudut inklinasi betis relatif terhadap horizontal
7. Kaki
Gambar 3.3.18 gaya yang bekerja pada kaki
Diketahui: = gaya berat yang diterima kaki (N)
= resultan gaya (y) pada kaki ( )
= resultan momen pada kaki ( )
SL7 = panjang kaki (m)
λ7 = proporsi jarak pusat massa ke kaki λ7 = 57.10%
7 = 21.8°
SL7 = 0.26 m Fyc = 347.5 N Mc = 56.91 Nm
R = ½ SL7 = ½ x 0,26 m = 0.13 m
∑Fx=0 tidak ada gaya horizontal
WF=7 N
3.2.1.3 Analisa Gaya dan Momen Pada Setiap Segmen Tubuh
Tabel 3.3.11 Berikut merupakan analisa gaya dan momen pada setiap segmen tubuh.
Tabel 3.3.11 Analisa gaya dan momen pada setiap segmen tubuh
Dari tabel 3.3.11 di atas, dapat dilihat bahwa momen yang terjadi lebih besar adalah saat melakukan posisi 6. Jadi dapat ditarik kesimpulan bahwa pekerjaan yang membutuhkan momen yang sangat besar, disarankan untuk memakai posisi 6 dari pada posisi 7. Kemudian untuk tiap segmen, paga segmen telapak tangan dapat dilihat terdapat kesamaan karena pada posisi 6 dan posisi 7 tidak dapat perbedaan untuk posisi tangan. Kemudian untuk segmen lengan bawah dapat diketahui bahwa posisi 6 lebih besar momennya dari pada posisi 7 dan juga hal ini lebih besar dari sebelumnya.
3.2.2 Perhitungan MPL
Merupakan batas besarnya gaya tekan pada segmen L5/S1 dari kegiatan pengangkatan dalam satuan Newton yang distandarkan oleh NIOSH (National Instiute of Occupational Safety and Health) tahun 1981. Besar gaya tekannya adalah di bawah 6500 N pada L5/S1. Sedangkan batasan gaya angkatan normal (the Action Limit) sebesar 3500 pada L5/S1. Sehingga, apabila Fc < AL (aman), AL < Fc < MPL (perlu hati-hati) dan apabila Fc > MPL (berbahaya). Batasan gaya angkat maksimum yang diijinkan , yang direkomendasikan NIOSH (1991) adalah berdasarkan gaya tekan sebesar 6500 N pd L5/S1 , namun hanya 1% wanita dan 25% pria yang diperkirakan mampu melewati batasan angkat ini.
Tabel 3.3.12 Rekapan data pada setiap segmen tubuh posisi 6
3.2.2.1 Posisi 6
Perhitungan MPL untuk posisi 6 adalah sebagai berikut. a. Gaya perut (FA) dan tekanan perut (PA) untuk Posisi 4
Keterangan : PA = Tekanan perut
FA = Gaya perut (Newton)
AA = Luas Diafragma (465 cm2 ) = 0,0465 m2
T = Sudut inklinasi kaki
Wtot = Gaya keseluruhan yang terjadi
b. Gaya Otot Pada Spinal Erector FM= (M(L5/S1) – FA.D)/E (Newton)
FM= (153.08 Nm – 2.36 N x 0.11 m )/ 0.05 m FM= 3056.41 N
Keterangan :
FM = Gaya otot pada Spinal Erector
E = Panjang lengan momen otot Spinal Erector dari L5/S1 (estimasi 0,05 m. sumber : Nurmianto; 1996)
M (L5/S1)= MT = momen resultan pada L5/S1 D = Jarakdari gaya perut ke L5/S1 (0,11 m)
(sumber: Nurmianto; 1996)
c. Gaya Kompresi Pada L5/S1
Fc L5/S1 = Wtot.cos - FA + FM
d. Gaya Kompresi Pada Kaki Wtot = 2 Wth + 2 Wc + 2 Wf
= {(2 Wpaha) + (2 Wbetis) + (2 Wkaki)}
= {(2 x 50.00 N) + (2 x 21.50 N) + (2 x 7.00 N)} = {(100 N) + ( 43 N) + (14 N)}
3.2.2.2 Posisi 7
Perhitungan MPL untuk posisi 7 adalah sebagai berikut. a. Gaya perut (FA) dan teckanan perut (PA) untuk Posisi 4
PA= (N/m2)
PA= (N/m2)
PA= (N/m2)
PA= (N/m2)
PA= (N/m2)
PA= N/m2
FA = PA AA FA = 177.75
N/m2 x 0.0465 m2 FA = 8.27 N
Wtot = Wo + 2.WH + 2.WLA + 2.WUA + Wt
Wtot = 100 N + 2 x 3 N+ 2 x 8.5 N + 2 x 14 N + 2 x 250 N Wtot = 100 N + 6 N+ 17 N + 28 N + 500 N
Wtot = 651 N
Keterangan : PA = Tekanan perut
AA = Luas Diafragma (465 cm2 ) = 0,0465 m2
H = Sudut inklinasi perut
T = Sudut inklinasi kaki
Wtot = Gaya keseluruhan yang terjadi b. Gaya Otot Pada Spinal Erector
FM= (M(L5/S1) – FA.D)/E (Newton)
FM = Gaya otot pada Spinal Erector
E = Panjang lengan momen otot Spinal Erector dari L5/S1 (estimasi 0,05 m. sumber : Nurmianto; 1996)
M (L5/S1)= MT = momen resultan pada L5/S1 D = Jarakdari gaya perut ke L5/S1 (0,11 m)
(sumber: Nurmianto; 1996) c. Gaya Kompresi Pada L5/S1
Fc L5/S1 = Wtot.cos - (FA + FM)
Fc L5/S1 = 651 N x cos - 8.27 N + 727.4 N
Fc L5/S1 = 651 N x 0 – 735.67 N Fc L5/S1 = –735.67 N
d. Gaya Kompresi Pada Kaki Wtot = 2 Wth + 2 Wc + 2 Wf
= {(2 Wpaha) + (2 Wbetis) + (2 Wkaki)}
= {(2 x 50.00 N) + (2 x 21.50 N) + (2 x 7.00 N)} = {(100 N) + ( 43 N) + (14 N)}
3.2.3 Perhitungan AL dan MPL
Action Limit merupakan kelanjutan tindakan untuk mengantisipasi, mencegah dan mengkoreksi proses produksi yang tidak sesuai dan memastikan bahwa proses tersebut tidak berulang. Untuk menghitung AL dan MPL hanya diperlukan untuk mengetahui berat obyek yang diangkat, lokasi beban yang berhubungan dengan pekerja, jarak dan frekuensi angkat, dan durasi dari kegiatan mengangka (simata, 2011).
Tabel 3.3.14 Data Vertikal rata-rata
Periode Lokasi vertikal rata-rata
Berdiri, V > 75 cm Membungkuk, V≤ 75
1 jam 18 15
8 jam 15 12
(Waters dalam Marras dan Karwowski (editor), 2006)
3.2.3.1 Posisi 6
Gambar 3.3.19 Posisi awal dan akhir 6 Diketahui :
k = 50 kg
V = 56 cm
D = │85 –56│ = 29cm
H = 58 cm
3.2.3.2 Hasil Analisa AL dan MPL
Setelah dihitung AL dan FC, maka akan dianalisa dengan perbandingan AL, FC, dan konstanta MPL. Kesimpulan ditarik berdasarkan hal berikut.
Kesimpulan : Fc<AL Aman
AL < Fc < MPL perlu Hati-hati Fc > MPL Berbahaya
(Sumber: Maras and Karwowski, 2006) Adapun tabelnya adalah sebagai berikut.
Dari tabel 3.3.15, dapat ditarik sebuah analisa bahwa hal tersebut aman karena gaya pada kompresi L5/S1 mempunyai nilai -735.67. masih lebih kecil dari Al yang mempunyai nilai 107.79.
3.2.4 Perhitungan RWL dan LI
Menurut Winter, 1979. Recommended Weight Limit merupakan rekomendasi batas beban yang dapat diangkat oleh manusia tanpa menimbulkan cidera meskipun pekerjaan tersebut dilakukan secara repetitive dan dalam jangka waktu yang cukup lama. RWL ini ditetapkan oleh NIOSH pada tahun 1991 di Amerika Serikat.
Setelah nilai RWL diketahui, selanjutnya perhitungan Lifting Index, untuk mengetahui index pengangkatan yang tidak mengandung resiko cidera tulang belakang.
Dalam tubuh manusia terdapat tiga jenis gaya:
1. Gaya Gravitasi, yaitu gaya yang melalui pusat massa dari tiap segmen tubuh manusia dengan arah ke bawah. Besar gayanya adalah massa dikali percepatan gravitasi ( F = m.g )
2. Gaya Reaksi yaitu gaya yang terjadi akibat beban pada segmen tubuh atau berat segmen tubuh itu sendiri.
3. Gaya otot yaitu gaya yang terjadi pada bagian sendi, baik akibat gesekan sendi atau akibat gaya pada otot yang melekat pada sendi. Gaya ini menggambarkan besarnya momen otot.
3.2.4.1 RWL 1 (Pegangan Baik)
a. Posisi Awal
Gambar 3.3.20 Posisi awal pegangan baik Diketahui :
LC = 10 kg FM = 0.45 CM = 1 H=66 cm V= 57
D = | 87-57 | = 30 A = 0°
HM = 25/66 = 0.38
VM (Indonesia) = 1 – 0,00326 │V -69│ VM (Indonesia) = 1 – 0,00326 │-12│ VM (Indonesia) = 1 – 0.03912
VM (Indonesia) = 0.96
DM = 0,82 + = 2.32
AM = 1
RWL = LC x HM x VM x DM x AM x FM x CM RWL = 10 x 0.38 x 0.96 x 2.32 x 1 x 0.45 x 1 RWL = 3.81
Keterangan:
LI=
Jika LI < 1, maka aktivitas tersebut tidak mengandung resiko cidera tulang belakang. Jika LI ≥ 1, maka aktivitas tersebut mengandung resiko cidera tulang belakang.
Maka nilai LI = = 2.62
Gambar 3.3.21 Posisi akhir pegangan baik
3.2.4.2 RWL 2 (Pegangan Buruk)
RWL 2 dalam pegangan buruk dapat dihitung kemudian dijabarkan sebagai berikut:
Gambar 3.3.22 Posisi awal pegangan buruk Diketahui :
LC = 10 kg FM = 0.45 CM = 0.9 H=58 cm V= 56
D = | 85-56 | = 29 A = 0°
HM = 25/58 = 0.43
VM (Indonesia) = 1 – 0,00326 │V -69│ VM (Indonesia) = 1 – 0,00326 │-13│ VM (Indonesia) = 1 – 0.042
VM (Indonesia) = 0.96
AM = 1 – 0,0032 . 0 AM = 1
RWL = LC x HM x VM x DM x AM x FM x CM RWL = 10 x 0.43 x 0.96 x 2.38 x 1 x 0.45 x 1 RWL = 4.42
Keterangan:
LI=
Jika LI < 1, maka aktivitas tersebut tidak mengandung resiko cidera tulang belakang. Jika LI ≥ 1, maka aktivitas tersebut mengandung resiko cidera tulang belakang.
b. Posisi Akhir
Gambar 3.3.23 Posisi akhir pegangan buruk
3.2.4.3 Hasil Analisis RWL dan LI
Tabel 3.3.16 Berikut menjelaskan analisis RWL dan LI. Tabel 3.3.16 Kesimpulan Analisa RWL dan LI
besar dari pada pegangan buruk. Hal ini disebabkan pegangan bruuk yang digunakan tidak ergonomis dan mempunyai beban yang sangat berat sehingga aktivitas tersebut mengandung resiko cedera tulang belakang
3.2.5. Pengolahan dan Analisis Data Menggunakan Metode REBA
Rapid Entire Body Assessment ( REBA ) REBA dikembangkan oleh Hignett dan McAtamney pada tahun 2000 sebagai alat untuk menilai postur terhadap risiko
Musculoskeletal Disorders ( MSDs ). Membentuk penilaian kuantitatif dari tubuh yang berkaitan dengan beban dan aktivitas. Dapat digunakan baik pada postur pergerakan dinamis dan statis, serta menilai hampir semua aktivitas. REBA adalah metode yang didesain sebagai metode analisis postur yang cepat untuk seluruh aktivitas tubuh, baik statis maupun dinamis. REBA merupakan desain yang sama dengan RULA , menyediakan pengukuran yang objektif terhadap risiko MSDs yang disebabkan oleh aktivitas tapi hanya untuk penilaian aktivitas yang kurang pergerakan dan melibatkan seluruh tubuh (Albugis, 2009).
Tabel 3.3.17 REBA Decission
3.2.5.1 Pengolahan Menggunakan Metode REBA pada posisi 6
Gambar 3.3.24 REBA posisi 6 3.2.5.2 Hasil Analisis REBA pada posisi 6
Hasil metode reba pada posisi 6 adalah sebagai berikut.
Gambar 3.3.25 REBA employee assesment worksheet posisi 6 (Sumber : Pengolahan data primer)
3.2.5.1 Pengolahan Menggunakan Metode REBA pada posisi 7
Pengolahan menggunakan metode reba pada posisi 7 adalah sebagai berikut.
Gambar 3.3.26 REBA posisi 7
3.2.5.2 Hasil Analisis REBA pada posisi 7
Gambar 3.3.27 REBA employee assesment worksheet posisi 7
Dari gambar 3.3.27, dengan perhitungan REBA didapat nilai 6 yang berarti dapat ditarik kesimpulan bahwa pekerjaan tersebut memiliki medium risk. Kemudian solusinya sebaiknya diinvestigasi mana yang salah dan seharusnya diberi tindakan segera.
3.3 Rancangan Metode Kerja Berdasarkan Prinsip Biomekanika
Banyak metode-metode kerja yang dapat dipergunakan dalam meningkatkan produktivitas, seiring dengan variabilitas kerja itu sendiri. Sehingga pada akhirnya akan menghasilkan banyak alternatif dalam pemilihan metode kerja tersebut, untuk membandingkan metode kerja yang terbaik adalah melihat kriteria waktu. Waktu penyelesaian suatu pekerjaan yang lebih singkat, akan menghasilkan produktivitas yang lebih tinggi, karena jumlah keluaran atau output persatuan waktu akan semakin banyak. Metode MTM (Method Time Measurement) merupakan salah satu solusi yang baik, karena metode ini mempunyai keunggulan dapat mendeteksi waktu penyelesaian suatu pekerjaan dalam suatu metode yang diusulkan sebagai alternatif, sebelum metode kerja tersebut diterapkan atau dijalankan, dengan menggunakan metode MTM ini dapat diketahui gerakan-gerakan yang dilakukan operator dalam melakukan pekerjaannya, baik dengan menggunakan tangan kanan maupun tangan kiri dengan meminimasi waktu yang dibutuhkan dalam melaksanakan pekerjaan.