Informasi Dokumen
- Penulis:
- Windy Sura Wijaya Purwana
- Sekolah: Sekolah Tinggi Manajemen Informatika & Teknik Komputer Surabaya
- Mata Pelajaran: Sistem Komputer
- Topik: Rancang Bangun Pengendalian Motor Melalui PLC Festo Berbasis Mikrokontroler MCS-51
- Tipe: tugas akhir
- Tahun: 2004
- Kota: Surabaya
Ringkasan Dokumen
I. PENDAHULUAN
Bagian ini menjelaskan latar belakang masalah yang berkaitan dengan penggunaan PLC (Programmable Logic Controller) untuk mengontrol motor tiga fasa di laboratorium STIKOM. Penulis menyoroti pentingnya pengembangan sistem kontrol yang dapat mengendalikan perangkat analog, khususnya dalam konteks pendidikan teknik elektro. Tujuan dari penelitian ini adalah untuk merancang dan membangun sistem kontrol yang menghubungkan PLC dengan mikrokontroler MCS-51, yang mampu mengontrol kecepatan motor tiga fasa secara efektif.
1.1 Latar Belakang Masalah
Latar belakang masalah menjelaskan bahwa PLC adalah alat yang digunakan untuk mengontrol sistem otomatis di industri. Di laboratorium STIKOM, PLC Festo FST 101B-LED digunakan untuk mengontrol perangkat digital, namun belum digunakan untuk perangkat analog. Penulis ingin mengeksplorasi kemampuan PLC dalam mengontrol kecepatan motor tiga fasa melalui inverter, yang memerlukan konversi sinyal dari digital ke analog.
1.2 Perumusan Masalah
Perumusan masalah merangkum tantangan utama yang akan dipecahkan oleh penelitian ini, yaitu bagaimana merancang modul konversi digital ke analog dan membangun protokol komunikasi antara PLC dan mikrokontroler. Ini bertujuan untuk memastikan bahwa data yang dikirim dari PLC dapat diterjemahkan menjadi sinyal analog yang diperlukan oleh inverter untuk mengontrol motor.
1.3 Pembatasan Masalah
Pembatasan masalah ditetapkan untuk memperjelas ruang lingkup penelitian. Penelitian ini akan fokus pada penggunaan satu bit output PLC untuk berkomunikasi dengan motor tiga fasa, serta pengaturan kecepatan motor dan arah putaran. Ini juga mencakup penggunaan mikrokontroler sebagai jembatan antara PLC dan DAC.
1.4 Tujuan
Tujuan penelitian ini adalah untuk menghasilkan konverter digital ke analog yang dapat mengatur empat output analog dari satu bit input digital. Selain itu, penelitian ini bertujuan untuk mengembangkan protokol komunikasi yang efisien antara PLC dan mikrokontroler, serta menciptakan perangkat yang mudah digunakan di laboratorium.
1.5 Kontribusi
Kontribusi penelitian ini adalah pengembangan metode baru untuk mengontrol motor tiga fasa menggunakan PLC, yang diharapkan dapat menjadi dasar bagi penelitian selanjutnya. Ini juga memberikan wawasan baru bagi mahasiswa dalam memahami aplikasi praktis PLC dalam sistem kontrol industri.
1.6 Sistematika Penulisan
Sistematika penulisan dibagi menjadi beberapa bab yang mencakup pendahuluan, landasan teori, metode penelitian, pengujian sistem, dan penutup. Setiap bab akan membahas aspek-aspek penting dari penelitian ini secara mendalam.
II. LANDASAN TEORI
Bagian ini membahas teori dasar yang mendasari penelitian, termasuk konsep PLC, mikrokontroler MCS-51, dan berbagai komponen yang terlibat dalam sistem kontrol. Teori-teori ini memberikan pemahaman yang diperlukan untuk merancang sistem yang efektif dan efisien.
2.1 Programmable Logic Controller (PLC)
PLC adalah perangkat elektronik yang dirancang untuk mengontrol proses otomatisasi industri. Penelitian ini membahas sejarah, fungsi, dan aplikasi PLC dalam sistem kontrol. PLC dapat diprogram untuk melakukan berbagai fungsi logika, memantau proses, dan mengontrol perangkat keras dengan efisien.
2.1.1 Sistem Komponen dari PLC
Sistem komponen PLC terdiri dari beberapa bagian penting, termasuk Central Control Unit (CCU), modul I/O, dan perangkat pemrograman. Setiap komponen memiliki peran spesifik dalam memastikan bahwa PLC dapat berfungsi dengan baik dalam mengontrol peralatan industri.
2.1.2 Central Control Unit (CCU)
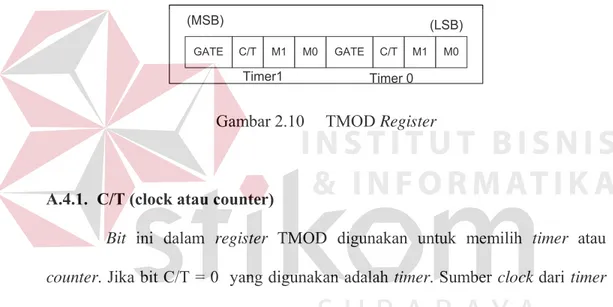
CCU adalah jantung dari PLC yang bertanggung jawab untuk memproses data dan menjalankan program yang telah diprogram. CCU menggunakan mikroprosesor untuk mengolah sinyal input dan menghasilkan sinyal output yang diperlukan untuk mengontrol aktuator.
2.1.3 Unit Input Output
Modul input-output (I/O) berfungsi untuk menghubungkan PLC dengan perangkat luar seperti sensor dan aktuator. Modul input mengubah sinyal dari sensor menjadi format yang dapat diproses oleh PLC, sementara modul output mengubah sinyal dari PLC menjadi sinyal yang dapat menggerakkan aktuator.
2.1.4 Kelebihan dan Kekurangan PLC
PLC memiliki banyak kelebihan dibandingkan sistem kontrol konvensional, seperti fleksibilitas, kemudahan dalam mendeteksi dan memperbaiki kesalahan, serta kecepatan operasi yang tinggi. Namun, PLC juga memiliki kekurangan, seperti ketergantungan pada lingkungan yang sesuai dan kebutuhan untuk pelatihan bagi pengguna baru.
2.1.5 Konsep PLC
Konsep dasar PLC mencakup kemampuan untuk diprogram, mengolah logika, dan mengontrol proses. Ini memungkinkan pengguna untuk mengadaptasi PLC sesuai dengan kebutuhan spesifik dari sistem yang sedang dikendalikan, menjadikannya alat yang sangat berguna dalam industri.
III. METODE PENELITIAN
Metode penelitian ini menjelaskan langkah-langkah yang diambil untuk merancang dan membangun sistem kontrol yang diusulkan. Ini mencakup perancangan perangkat keras dan perangkat lunak, serta proses pembuatan dan pengujian sistem.
3.1 Perancangan
Perancangan sistem mencakup pengembangan perangkat keras dan perangkat lunak yang diperlukan untuk membangun sistem kontrol. Ini melibatkan pemilihan komponen yang tepat dan pengembangan diagram alur untuk memastikan bahwa semua bagian sistem berfungsi dengan baik.
3.1.1 Perancangan Perangkat Keras
Perancangan perangkat keras mencakup pemilihan dan pengaturan komponen seperti mikrokontroler, DAC, dan inverter. Ini juga melibatkan pengembangan rangkaian untuk menghubungkan semua komponen agar dapat berfungsi secara sinergis.
3.1.2 Perancangan Perangkat Lunak
Perancangan perangkat lunak melibatkan pengembangan program yang akan dijalankan pada PLC dan mikrokontroler. Ini termasuk penulisan kode untuk mengontrol aliran data antara PLC dan DAC, serta untuk mengatur kecepatan motor berdasarkan input dari pengguna.
3.2 Pembuatan
Bagian ini menjelaskan proses pembuatan perangkat keras dan perangkat lunak yang telah dirancang. Ini mencakup langkah-langkah praktis dalam merakit komponen, menginstal perangkat lunak, dan menguji sistem untuk memastikan bahwa semuanya berfungsi dengan baik.
3.3 Pengujian
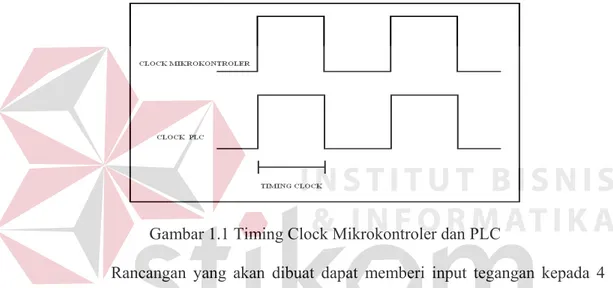
Pengujian sistem dilakukan untuk memastikan bahwa semua fungsi berjalan sesuai dengan yang diharapkan. Ini mencakup pengujian komunikasi antara PLC dan mikrokontroler, serta pengujian kinerja motor yang dikendalikan oleh sistem.
IV. PENGUJIAN DAN EVALUASI SISTEM
Bagian ini membahas prosedur pengujian yang dilakukan untuk mengevaluasi kinerja sistem yang telah dibangun. Pengujian ini bertujuan untuk memastikan bahwa sistem berfungsi dengan baik dan memenuhi tujuan yang telah ditetapkan.
4.1 Prosedur Pengujian
Prosedur pengujian meliputi langkah-langkah yang diambil untuk menguji komunikasi data antara PLC dan mikrokontroler, serta pengujian fungsi setiap komponen dalam sistem. Ini juga mencakup pengujian terhadap kecepatan dan akurasi pengendalian motor.
4.2 Hasil Pengujian
Hasil pengujian menunjukkan bahwa sistem dapat berfungsi dengan baik dalam mengontrol motor tiga fasa. Data yang diperoleh dari pengujian menunjukkan bahwa sistem dapat mengatur kecepatan dan arah putaran motor sesuai dengan input yang diberikan.
4.3 Analisa
Analisa hasil pengujian dilakukan untuk mengevaluasi efektivitas sistem yang telah dibangun. Ini mencakup identifikasi kekuatan dan kelemahan dari sistem, serta rekomendasi untuk perbaikan di masa depan.
V. PENUTUP
Bagian ini menyimpulkan hasil penelitian dan memberikan rekomendasi untuk penelitian lebih lanjut. Penulis menekankan pentingnya pengembangan sistem kontrol yang lebih canggih dan aplikatif di bidang industri.
5.1 Kesimpulan
Kesimpulan penelitian ini adalah bahwa sistem kontrol yang dirancang dapat berfungsi dengan baik dalam mengendalikan motor tiga fasa menggunakan PLC dan mikrokontroler. Sistem ini menunjukkan potensi untuk digunakan dalam aplikasi praktikum di laboratorium.
5.2 Saran
Saran untuk penelitian lebih lanjut mencakup pengembangan sistem kontrol yang lebih kompleks, termasuk penggunaan umpan balik untuk meningkatkan akurasi pengendalian. Penulis juga menyarankan agar penelitian ini dapat dijadikan dasar untuk pengembangan teknologi kontrol yang lebih inovatif.
Referensi Dokumen
- Controlling the word with your PC ( Bergsman Paul )
- Traing Dasar Progammale Logic Controller ( Indrijono Dwi, S.Kom )
- Elektronika Komputer Digital ( Malvino A.P )
- Panduan praktis Teknik Antarmuka dan Pemrograman Mikrokontroller AT89C51 ( Nalwan P.A. )
- Mengenal Teknik Elektronika ( Rusmadi Dedy )