1
RANCANG BANGUN SISTEM MONITORING ARUS DAN TEGANGAN
MULTICHANNEL MOTOR INDUKSI TIGA FASA MENGGUNAKAN
MIKROKONTROLER ATmega8535
Andi Setiawan
Jurusan Teknik Elektro
Fakultas Teknologi Industri Universitas Mercu Buana
Kampus Meruya, Jl. Meruya Selatan Kebon Jeruk, Jakarta Barat 11650 Indonesia
email : [email protected]
Abstrak
Telah dirancang dan direalisasikan sebuah sistem monitoring arus dan tegangan multichannel motor induksi tiga fasa menggunakan mikrokontroler ATmega8535. Alat tersebut dapat memonitoring arus dan tegangan dari motor induksi tiga fasa dengan jumlah lebih dari satu dalam waktu yang bersamaan. Selain itu, alat tersebut dapat menyimpan data monitoring ke dalam database Microsoft Access. Data yang tersimpan dapat digunakan untuk menganalisisi kinerja operasi dari motor induksi tiga fasa yang dimonitoring.
Sistem monitoring arus dan tegangan multichannel motor induksi tiga fasa menggunakan mikrokontroler ATmega8535 ini menggunakan 6 buah sensor arus tipe CR 9580-10 dengan rasio 10A AC/5V DC dan 2 buah sensor tegangan dengan rasio 400V AC/ 5V DC. Semua output dari sensor langsung dihubungkan ke ADC internal mikrokontroler ATmega8535 pada port PA.0 – PA.7. Data terukur dari semua sensor akan dikirimkan ke komputer dengan komunikasi serial menggunakan protocol RS-232. Borland Delphi 7 merupakan sebuah program aplikasi yang digunakan untuk menampilkan data arus dan tegangan pada komputer. Borland Delphi 7 juga dapat dihubungkan dengan database Microsoft Access untuk menyimpan semua data arus dan tegangan yang ditampilkan.
Dari penelitian yang telah dilakukan, diperoleh bahwa Borland Delphi 7 dapat menampilkan nilai arus dan tegangan motor induksi tiga fasa yang dimonitoring. Data ditampilkan secara kontinu dan tersimpan secara otomatis ke database Microsoft Access dengan interval waktu penyimpanan otomatis yang dapat diatur sesuai kebutuhan. Dari pengujian yang telah dilakukan dengan alat ukur standar digital power meter WT 130 dan multimeter digital fluke 289 diperoleh koefisien korelasi linier sebesar r = 100%.
Kata kunci : Monitoring arus dan tegangan, Multichannel, Motor induksi tiga fasa,
Mikrokontroler ATmega8535
1. Pendahuluan 1.1. Latar Belakang
Motor induksi tiga fasa merupakan salah satu jenis motor arus bolak-balik yang paling banyak digunakan secara luas di bidang industri, baik industri kecil, menengah maupun besar. Hal ini disebabkan motor induksi memiliki
kelebihan diantaranya torsi start yang besar, konstruksi sederhana dan mudah pengoperasiannya.
Dikarenakan sangat pentingnya kedudukan motor tiga fasa dalam bidang industri untuk menunjang proses produksi, maka dalam pengoperasian motor tiga
2 fasa, monitoring arus dan tegangan motor perlu dilakukan secara real time. Hal tersebut diperlukan untuk memantau kinerja motor tersebut. Sehingga gangguan pada motor dapat diketahui lebih dini dan diminimalisir melalui analisis arus dan tegangan motor yang termonitoring.
Perkembangan teknologi dibidang semikonduktor telah memberikan sumbangan yang sangat besar bagi perkembangan teknologi mikrokontroler. Salah satu perkembangan dari generasi mikrokontroler yang dibuat oleh Atmel adalah versi keluarga AVR (Alf and
Vegard’s Risc processor). Mikrokontroler
AVR memiliki arsitektur RISC 8 bit, dimana semua instruksi dikemas dalam kode 16-bit dan sebagian besar eksekusi dilakukan dalam 1 (satu) siklus clock. Mikrokontroler AVR seri ATmega8535 memiliki beberapa kelebihan, diantaranya memori lebih besar (8 Kb In-system self
programmable flash, 512 byte EEPROM,
512 SRAM), harga relatif murah, serta lebih cepat dalam mengeksekusi program.
Perkembangan teknologi dalam sistem kontrol dan monitoring sekarang ini mengarah pada sistem yang memiliki efisien tinggi serta harga relatif murah. Metode multichannel merupakan salah satu dari perkembangan teknologi tersebut yang dapat meningkatkan efisiensi dan meringankan biaya pengadaan serta perawatan. Dengan menerapkan metode
multichannel pada sistem monitoring,
jumlah obyek yang termonitoring dapat lebih dari satu.
Motor Current Signature Analysis
(MCSA) merupakan salah satu alat yang dapat memonitoring arus dan tegangan motor induksi tiga fasa yang sering digunakan sekarang ini. Alat tersebut dapat memonitoring arus, tegangan, sudut fasa, daya aktif, daya reaktif, dan bentuk gelombang sinusoidal tegangan dari motor induksi tiga fasa yang dimonitoring. Namun, alat tersebut hanya dapat memonitoring motor induksi tiga fasa satu persatu dan tidak dapat melakukan
monitoring dua buah motor induski tiga fasa dalam waktu yang bersamaan.
Berdasarkan latar belakang yang ada, maka pada penelitian ini akan dirancang sebuah sistem monitoring arus dan tegangan multichannel motor induksi tiga fasa menggunakan mikrokontroler ATmega8535.
2. Landasan Teori 2.1. Motor Induksi
Motor induksi terdiri dari dua bagian, yaitu stator atau bagian yang diam
dan rotor atau bagian yang berputar,
dimana kedua bagian tersebut dipisahkan oleh suatu celah udara (air gap) yang kecil dengan jarak antara 0.4 mm sampai dengan 4 mm tergantung daya output. Bagian stator dihubungkan ke sumber tegangan bolak-balik (AC), sedangkan bagian rotor tidak dihubungkan secara langsung ke sumber tegangan, tetapi memiliki arus yang dihasilkan oleh adanya arus induksi yang ditimbulkan dari arus
stator (Zaini, 2013).
Gambar 2.1 Motor Induksi (Fakhrizal, 2007)
Prinsip kerja motor induksi tiga fasa didasarkan pada hukum Faraday (tegangan induksi akan timbul akibat perubahan induksi magnetic pada suatu lilitan) dan hukum Lorentz (perubahan
magnetic akan menimbulkan gaya).
Prinsip dasarnya sebagai berikut :
1. Tegangan induksi akan timbul pada setiap konduktor diakibatkan oleh medan magnet yang memotong konduktor (hukum Faraday).
2. Karena konduktor dihubungkan menjadi satu, membuat tegangan induksi menghasilkan arus yang mengalir dari konduktor ke konduktor lain.
3 3. Karena terjadi arus diantara medan
magnet maka timbul gaya (hukum Lorentz).
4. Gaya akan selalu menarik konduktor untuk bergerak sepanjang medan magnet (Fakhrizal, 2007).
2.2. Current Transformer
Current Transformer (CT) adalah
suatu peralatan listrik yang dapat men-transformasikan dari arus yang besar ke arus yang kecil guna pengukuran atau proteksi, current transformer
dipergunakan dalam rangkaian arus bolak-balik. Current transformer digunakan pada pengukuran arus yang besarnya ratusan amper yang mengalir pada jaringan tegangan tinggi. Jika arus yang hendak diukur mengalir pada tegangan rendah dan besarnya dibawah 5 ampere, maka pengukuran dapat dilakukan secara langsung. Sedangkan, pada pengukuran arus yang besar harus dilakukan secara tidak langsung dengan menggunakan
current transformer (Suryawan, 2012).
Gambar 2.2 Current transformer
(Wibowo, 2012)
Sensor arus CR9580-10 merupakan salah satu current sensor dari seri CR9500 dengan tipe CT splitcore ber-diameter 0.40 inchi. Input dari current sensor CR9580-10 adalah arus AC 0-CR9580-10 A dengan output
0-5 VDC. Dengan output berupa tegangan DC, maka output current sensor CR9580-10 dapat langsung dihubungkan dengan sebuah koneksi analog input dari mikrokontroler tanpa tambahan pengkondisian sinyal. Current sensor ini sering digunakan pada proses kontrol dan peralatan instrumentasi di bidang industri. Spesifikasi dari current sensor CR9580-10 adalah accuracy ± 0.5 %, ripple 1 % max,
maximal signal output 12 VDC, frequency
50 - 400 Hz, insulation class 600 V,
response time 250 ms maximal, serta
current sensor ini dapat bekerja pada
temperature -30 oC sampai 60 oC.
Gambar 2.3 Current sensor CR9580-10 (Anonim, 2005)
2.3. Potential Transformer
Potential transformer adalah suatu
peralatan listrik yang berfungsi memperkecil besaran tegangan pada sistem tenaga listrik menjadi besaran tegangan untuk sistem pengukuran dan mengisolasi rangkaian sekunder terhadap primer.
Potential transformer memiliki angka
perbandingan lilitan/tegangan primer dan sekunder yang menunjukkan kelasnya.
Klasifikasi potential transformer
menurut konstruksinya dapat dibedakan menjadi. Pertama, potential transformer
induktif, yang terdiri dari belitan primer dan belitan sekunder, serta tegangan pada belitan primer akan menginduksikannya pada belitan sekunder melalui core. Kedua, potential transformer capasitif, yang terdiri dari rangkaian kondensator yang berfungsi sebagai pembagi tegangan tinggi dari trafo pada tegangan menengah yang menginduksikan tegangan ke belitan sekunder melalui media capasitor
(Anonim, 2005).
Gambar 2.4 Potential transformer
(Anonim, 2005)
2.4. Mikrokontroler ATmega8535 Mikrokontroler AVR (Alf and
4 satu produk mikrokontroler dari Atmel. Mikrokontroler AVR memiliki arsitektur RISC 8-bit, dimana semua instruksi dikemas dalam kode 16-bit dan sebagian besar instruksi dieksekusi dalam 1 (satu) siklus clock. AVR berteknologi RISC
(Reduced Instruction Set Computing).
Secara umum AVR dapat dikelompokkan menjadi 4 kelas, diantaranya keluarga ATiny, keluarga AT90Sxx, keluarga ATmega, dan AT86RFxx. Pada dasarnya yang membedakan masing-masing kelas adalah memori, peripheral dan fungsinya. Dari segi arsitektur dan instruksi yang digunakan, mereka bisa dikatakan hampir sama (Wardhana, 2006)
Gambar 2.5 Pin mikrokontroler ATmega8535 (Anonim, 2003)
Spesifikasi dari mikrokontroler ATmega8535 adalah sebagai berikut : 1. Sistem mikroprosesor 8-bit berbasis
RISC (Reduced Instruction Set
Computing) dengan kecepatan
maksimal 16 MHz.
2. Memori flash 8K Bytes, SRAM sebesar 512 Bytes dan EEPROM
(Electrically Erasable Programable
Read Only Memory) sebesar 512
Bytes.
3. ADC internal dengan resolusi 10-bit
sebanyak 8 channel.
4. Dua Timer/Counter 8-bit dengan
separate prescalers dan compare
modes.
5. Satu Time/Counter 16-bit dengan
separate prescalers, compare modes
dan capture mode.
6. Real time counter dengan separate
oscillator.
7. Portal komunikasi serial (USART)
dengan kecepatan maksimal 2,5 Mbps. 8. Enam pilihan mode sleep menghemat
penggunaan daya listrik (Wardhana, 2006).
2.5. Borland Delphi 7
Borland Delphi 7 merupakan bahasa pemrograman yang memberikan fasilitas pembuatan aplikasi visual. Keunggulan bahasa pemrograman ini terletak pada produktivitas, kualitas, pengembangan perangkat lunak, kecepatan kompilasi, pola desain yang menarik serta diperkuat dengan pemrogramannya yang terstruktur. Keunggulan lain dari Borland Delphi 7 adalah dapat digunakan untuk merancang program aplikasi yang memiliki tampilan seperti aplikasi program lain yang berbasis Windows. Khusus untuk pemrograman database, Borland Delphi 7 menyediakan fasilitas objek yang kuat dan lengkap yang memudahkan programmer
dalam membuat program. Format database
yang dimiliki Borland Delphi 7 adalah
database Paradox, dBase, Microsoft
Access, SyBASE, SQL dan Oracle (Madcoms, 2003).
Borland Delphi 7 menggunakan bahasa object Pascal sebagai bahasa dasar. Dengan pendekatan visual, maka dapat diciptakan aplikasi yang canggih tanpa banyak menulis kode. Borland Delphi 7 merupakan bahasa pemrograman yang mempunyai cakupan kemampuan yang luas. Berbagai jenis aplikasi dapat dibuat menggunakan Borland Delphi 7, termasuk aplikasi untuk mengolah teks, grafik, angka, basis data dan aplikasi web. Bahkan Borland Delphi 7 dapat digunakan untuk menggerakkan perangkat keras
(hardware).
Lingkungan Borland Delphi 7 ditata dalam bentuk yang sangat menarik. Modul ini bertujuan untuk memperkenalkan Integrated Development
Environment (IDE) atau Lingkungan
5 Delphi 7. Modul ini juga menunjukkan cara untuk mengolah IDE sesuai dengan selera pemrogram. IDE adalah sebuah lingkungan yang berisi tool-tool yang diperlukan untuk desain, menjalankan dan mengetes sebuah aplikasi, disajikan dan terhubung dengan baik sehingga memudahkan pengembangan program. Pada Borland Delphi 7 IDE terdiri dari
Main Window, ToolBar, Component
Palette, Form Designer, Code Editor,
Code Explorer, Object Inspector, dan
Object Tree View (Husni, 2004).
3. Perancangan Alat
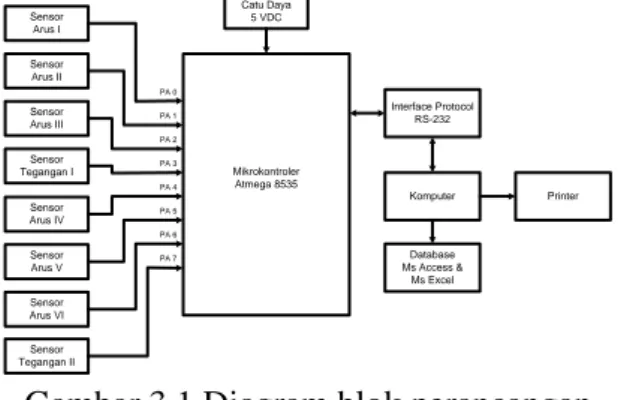
3.1. Diagram Blok Perancangan Diagram blok dari perancangan alat sistem monitoring arus dan tegangan
multichannel motor induksi tiga fasa
menggunakan mikrokontroler ATmega 8535 diperlihatkan gambar 3.1. Mikrokontroler Atmega 8535 Sensor Tegangan I Sensor Arus I Sensor Arus II Sensor Arus III Sensor Arus IV Sensor Arus V Sensor Arus VI Sensor Tegangan II PA 0 PA 1 PA 2 PA 3 PA 4 PA 5 PA 6 PA 7 Interface Protocol RS-232 Komputer Database Ms Access & Ms Excel Printer Catu Daya 5 VDC
Gambar 3.1 Diagram blok perancangan alat
Pada perancangan alat ini, digunakan 3 sensor arus dan 1 sensor tegangan yang dihubungkan langsung dengan port A0 – A3 mikrokontroler ATmega8535, dan digunakan untuk memonitoring motor induksi tiga fasa ke-1. Kemudian, 3 sensor arus dan 1 sensor tegangan lagi yang dihubungkan langsung dengan port A4 – A7 mikrokontroler ATmega8535, dan digunakan untuk memonitoring motor induksi tiga fasa ke-2. Tegangan analog output dari semua sensor akan dikonversi menjadi sinyal digital oleh ADC internal 10 bit mikrokontroler ATmega8535 terlebih
dahulu, sebelum dikirim ke komputer menggunakan komunikasi data secara serial. Data dari mikrokontroler ATmega8535 yang diterima komputer tersebut, akan ditampilkan dan diolah menggunakan software Borland Delphi 7. Data hasil pengolahan Borland Delphi 7 dapat disimpan secara otomatis dengan interval waktu yang dapat ditentukan ke database Microsoft Access, di-export ke Microsoft Excel dan dicetak menggunakan printer.
3.2. Rangkaian Sensor Arus CR 9580-10 dan Sensor Tegangan Sensor arus tipe CR 9580-10 berfungsi mengkonversi besaran arus dengan range 0-10 AC menjadi tegangan 0-5 VDC. Dengan nilai range output tersebut, maka keluaran dari sensor arus CR 9580-10 dapat langsung dihubungkan ke port ADC mikrokontroler ATmega8535 tanpa menggunakan pengkondisian sinyal terlebih dahulu. Rangkaian sensor arus CR 9580-10 ditunjukkan pada gambar 3.2
Gambar 3.2 Rangkaian sensor arus CR 9580-10
Sensor tegangan berfungsi mengkonversi besaran tegangan dengan
range 400 VAC menjadi tegangan
0-5VDC. Pada sensor ini, digunakan 2 buah transformer. Transformer 1 memiliki ratio tegangan 400VAC/220VAC dan transformer 2 memiliki ratio tegangan 220VAC/6VAC. Prinsip kerja dari sensor ini adalah, tegangan input sensor sebesar 400VAC akan diturunkan menjadi 220VAC oleh transformer 1. Karena output transformer 1 langsung dihubungkan ke input transformer 2 maka, tegangan output 220VAC transformer 1 akan langsung diturunkan kembali menjadi
Current Sensor CR9580-10 10A/5VDC To ADC Mikrokontroler + 0-10 AC 0-5 VDC
6 6VAC oleh transformer 2. Dengan menggunakan diode penyearah gelombang penuh, tegangan output transformer 2 diubah menjadi 6VDC, yang kemudian disetting menjadi 5 VDC menggunakan
resistor variable sebagai pembagi
tegangan. Sebuah kapasitor ditambahkan sebagai filter pada sensor tengangan ini sebelum dihubungkan langsung ke port
ADC mikrokontroler ATmega8535. Rangkaian sensor tengangan ditunjukkan pada gambar 3.3.
Gambar 3.3 Rangkaian sensor tegangan
3.3. Rangkaian Mikrokontroler ATmega8535
Rangkaian mikrokontroler yang dipakai merupakan sistem minimum mikrokontroler ATmega8535. Rangkaian sisitem minimum ini terdiri dari sebuah kristal 11.0592 MHz dan 2 kapasitor non polar 33pF untuk mendukung rangkaian osilator internal mikrokontroler. Tegangan catu daya untuk sistem minimum mikrokontroler ATMega8535 ini hanya diperbolehkan dalam range 2.7 – 5.5V, jika tegangan melebihi range tersebut, mikrokontroler akan rusak. Pada rangkaian mikrokontroler ATMega8535 ini akan dioptimalkan penggunaa ADC internalnya, karena sensor yang digunakan berjumlah 8 buah yang kemudian dihubungkan ke port
A0 - A7. ADC internal 10 bit mikrokontroler ATmega8535 tersebut akan mengkonversi tegangan output sensor arus dan sensor tegangan menjadi diskrit data-data digital 10 bit. Setiap perubahan tegangan input ADC akan sebanding dengan perubahan data digital yang dihasilkan. Range tegangan input ADC yang akan dikonversi berada pada 0 - 5V, sesuai dengan tegangan referensi yang digunakan, yaitu 5 VDC. Data-data digital
keluaran ADC akan mewakili tegangan masukkan dari range tersebut. Rangkaian mikrokontroler ATmega8535 ditunjukkan pada gambar 3.4.
Gambar 3.4 Rangkaian mikrokontroler ATmega8535
3.4. Rangkaian Komunikasi Serial Mikrokontroler ATmega8535
Interface antara komputer dengan
mikrokontroler ATmega8535 menggunkan komunikasi serial. Karena pada komputer telah dilengkapi dengan protocol sistem komunikasi serial UART (Universal
Asyncron Transmitte and Receive), maka
kedudukan mikrokontroler ATmega8535 dalam komunikasi serial ini adalah sebagai perangkat interface serial komputer. Oleh karena itu, untuk keperluan ini pada port
serial mikrokontroler ATmega8535 perlu ditambahkan IC RS-232, sebagai penyesuaian tegangan sebesar 12VDC. Komunikasi data secara serial antara mikrokontroler ATmega8535 dengan komputer dilakukan secara asinkron dengan jumlah data 8 bit, no parity, dan menggunakan boudrate 9600 bps. Untuk mengirim data, pada sistem minimum mikrokontroler ATMega8535 menggunakan port PD0 (RXD) dan PD1 (TXD) serta konektor DB-9 sebagai penghubung antara mikrokontroler dengan PC. Rangkaian komunikasi serial mikrokontroler ATmega8535 ditunjukkan pada gambar 3.5. T1 400V/220V T2 220V/6V 5K 1A 1000uF/16V To ADC Mikrokontroler 0-5 VDC PB0 (XCK/T0) 1 PB1 (T1) 2 PB2 (AIN0/INT2) 3 PB3 (AIN1/OC0) 4 PB4 (SS) 5 PB5 (MOSI) 6 PB6 (MISO) 7 PB7 (SCK) 8 RESET 9 PD0 (RXD) 14 PD1 (TXD) 15 PD2 (INT0) 16 PD3 (INT1) 17 PD4 (OC1B) 18 PD5 (OC1A) 19 PD6 (ICP) 20 PD7 (OC2) 21 XTAL2 12 XTAL1 13 GND 11 PC0 (SCL) 22 PC1 (SDA) 23 PC2 24 PC3 25 PC4 26 PC5 27 PC6 (TOSC1) 28 PC7 (TOSC2) 29 AREF 32 AVCC 30 GND 31 PA7 (ADC7) 33 PA6 (ADC6) 34 PA5 (ADC5) 35 PA4 (ADC4) 36 PA3 (ADC3) 37 PA2 (ADC2) 38 PA1 (ADC1) 39 PA0 (ADC0) 40 VCC 10 ATm ega8535-16PC 33pF 33pF 1 2 1 1 .0 5 9 2 M H z 5V
7 Gambar 3.5 Rangkaian komunikasi serial
mikrokontroler ATmega8535
3.5. Pemrograman pada
Mikrokontroler ATmega8535 Pemrograman pada sistem minimum mikrokontroler ATMega8535 terbagi menjadi beberapa subroutine
program. Pertama kali mikrokontroler ATMega8535 akan melakukan aktivasi inisialisasi stack pointer dan register
-register yang digunakan. Setelah
inisialisasi stack pointer, pemrograman mikrokontroler ATmega8535 dilanjutkan dengan setting fungsi port mikrokontroler ATmega8535 dan inisialisasi komunikasi serial. Pada subroutine program setting fungsi port, semua port I/O pada mikrokontroler ATmega8535 difungsikan sebagai masukan. Inisialisasi komunikasi serial dilakukan untuk men-setting
register-register yang berhubungan
dengan komunikasi serial, serta memberikan nilai baudrate untuk kecepatan komunikasinya.
Setelah mejalankan subroutine
program inisialisasi stack pointer, setting fungsi port dan inisialisasi komunikasi serial, maka pemrograman mikrokontroler Atmega8535 dilanjutkan dengan inisilisasi ADC. Pada subroutine program ini meliputi beberapa proses, diantaranya penentuan clock, penentuan tegangan referensi, format data output dan mode pembacaan. Register yang perlu di-setting nilainya adalah ADMUX (ADC
Multiplexer Slection Register) dan
ADCSRA (ADC Control and Status
Register A). Setelah proses inisialisasi
dilakukan, maka mikrokontroler Atmega8535 akan langsung mengkonversi tegangan analog output sensor menjadi data digital yang kemudian disimpan dalam sebuah register.
Data hasil konversi ADC akan tetap disimpan hingga ada permintaan kirim data dari komputer. Prosedur pengiriman data hasil konversi ADC mikrokontroler ATmega8535 diawali dengan permintaan dari komputer. Kemudian mikrokontroler ATmega8535 akan melakukan pencocokan permintaan dari komputer dan mengirim data ADC yang diinginkan. Secara keseluruhan urutan pemrograman pada mikrokontroler ATmega8535 ditunjukkan dengan
flowchart pada gambar 3.6
Mulai
Apa ada perintah 2 dan 3 dari PC? Inisialisasi stack pointer
Inisialisasi port Inisialisasi komunikasi serial
Inisialisasi ADC Ambil data, konversi dan simpan data ADC
Kirim data ADCL dan ADCH Arus phase R motor 1
Tunda
Kirim data ADCL dan ADCH Arus phase S motor 1
Tunda
Kirim data ADCL dan ADCH Arus phase T motor 1
Tunda
Kirim data ADCL dan ADCH Tegangan motor 1
Tunda Tidak
Apa ada perintah 4 dan 5 dari PC?
Tidak
Apa ada perintah 6 dan 7 dari PC?
Tidak
Ya Ya Ya
Apa ada perintah 8 dan 9 dari PC?
Tidak
Ya
Kirim data ADCL dan ADCH Arus phase R motor 2
Tunda
Kirim data ADCL dan ADCH Arus phase S motor 2
Tunda
Kirim data ADCL dan ADCH Arus phase T motor 2
Tunda Apa ada perintah 10 dan 11 dari PC?
Tidak
Apa ada perintah 12 dan 13 dari PC?
Tidak
Ya Ya
Apa ada perintah 14 dan 15 dari PC?
Tidak
Ya
Kirim data ADCL dan ADCH Tegangan motor 2
Tunda Apa ada perintah 16 dan 17 dari PC? Tidak Ya Ulangi? Selesai Tidak Ya
Gambar 3.6 Flowchart pemrograman mikrokontroler ATmega8535 PB0 (XCK/T0) 1 PB1 (T1) 2 PB2 (AIN0/INT2) 3 PB3 (AIN1/OC0) 4 PB4 (SS) 5 PB5 (MOSI) 6 PB6 (MISO) 7 PB7 (SCK) 8 RESET 9 PD0 (RXD) 14 PD1 (TXD) 15 PD2 (INT0) 16 PD3 (INT1) 17 PD4 (OC1B) 18 PD5 (OC1A) 19 PD6 (ICP) 20 PD7 (OC2) 21 XTAL2 12 XTAL1 13 GND 11 PC0 (SCL) 22 PC1 (SDA) 23 PC2 24 PC3 25 PC4 26 PC5 27 PC6 (TOSC1) 28 PC7 (TOSC2) 29 AREF 32 AVCC 30 GND 31 PA7 (ADC7) 33 PA6 (ADC6) 34 PA5 (ADC5) 35 PA4 (ADC4) 36 PA3 (ADC3) 37 PA2 (ADC2) 38 PA1 (ADC1) 39 PA0 (ADC0) 40 VCC 10 ATm ega8535-16PC 5V C1+ 1 VDD 2 C1-3 C2+ 4 C2- 5 VEE 6 T2OUT 7 R2IN 8 R2OUT 9 T2IN 10 T1IN 11 R1OUT 12 R1IN 13 T1OUT 14 GND 15 VCC 16 MAX232CPE 1 627 384 95 D C o n n e c to r 9 33pF 33pF 1 2 1 1 .0 5 9 2 M H z 1uF 1uF 1uF 1uF 1uF 5V TXD RX RXD TX
8 3.6. Perancangan Software
Menggunakan Borland Delphi 7 Pada komputer, untuk dapat menerima data ADC dari mikrokontroler ATmega8535 yang dikirim dengan komunikasi data serial, diperlukan program aplikasi yang dapat membaca data dari serial port tersebut, dan bahasa pemrograman Borland Delphi 7 yang dipilih dalam penelitian ini. Perancangan program aplikasi yang telah dibuat dengan Borland Delphi 7 pada penelitian ini dapat dikelompokkan menjadi :
1. Form password, berisi kolom edit
tempat memasukkan password sebagai persyaratan melanjutkan program aplikasi ini, form ini dibuat sebagai langkah pengamanan dari penyalahgunaan program aplikasi ini. Jika password yang dimasukkan salah, akan muncul peringatan dan tidak dapat melanjutkan ke form splash
screen.
Gambar 3.7 Form password
2. Form splash screen, form yang berisi
judul penelitian, nama penulis dan
progress bar loading. Form ini dibuat
untuk menampilkan judul penelitian dan identitas penulis selama 10 detik sebelum melanjutkan ke form
monitoring.
Gambar 3.8 Form splash screen
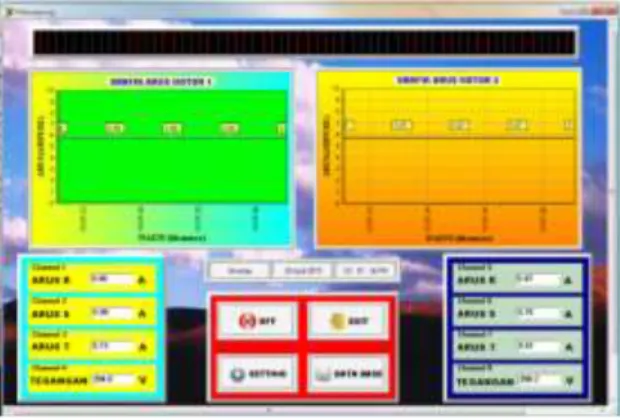
3. Form monitoring, berisi tampilan arus
fasa R,S,T dan tegangan dari ke-2 motor induksi tiga fasa yang dimonitoring. Data arus juga ditampilkan dalam bentuk grafik sehingga bisa dilihat fluktuasi kenaikan dan penurunannya.
Gambar 3.9 Form monitoring
4. Form database, berisi record data arus
fasa R,S,T dan tegangan dari ke-2 motor induksi tiga fasa yang dimonitoring dengan interval waktu
recording yang dapat diatur. Form ini
juga dilengkapi dengan fasilitas pencarian data berdasarkan tanggal, waktu, arus fasa (R,S,T) dan tegangan. Data pencarian tersebut dapat ditampilkan di Microsoft excel setra dicetak menggunakan printer.
9 Gambar 3.10 Form database
4. Analisa dan Pengujian Alat Pada BAB ini, akan dibahas tentang hasil pengujian alat yang telah dirancang, dari sisi hardware dan
software-nya. Pengujian hardware dan
software tersebut meliputi :
1. Pengujian sensor arus CR 9580-10 dan sensor tegangan, pengujian ini dimaksudkan untuk mengetahui bahwa sensor dapat berfungsi dengan baik dengan perubahan output sensor yang mengikuti perubahan inputannya. 2. Pengujian ADC mikrokontroler
ATmega8535, pengujian ini dimaksudkan untuk mengetahui respon ADC mikrokontroler ATmega8535 terhadap tegangan input ADC serta resolusi ADC-nya.
3. Pengujian sensor arus CR 9580-10 dan sensor tegangan pada komputer, dilakukan untuk menguji komunikasi
serial antara sensor arus dan tegangan
dengan komputer.
4. Pengujian sistem keseluruhan, dilakukan untuk mastikan program aplikasi yang telah dibuat menggunakan Borland Delphi 7 dapat berkomunikasi dengan mikrokontroler ATmega8535, menampilkan data, dan mengolah data yang dikirim mikrokontroler ATmega8535 serta menyimpannya di database Microsoftt Access
4.1. Pengujian sensor Arus CR 9580-10
Pengujian sensor arus CR 9580-10, dilakukan untuk mengetahui respon tegangan keluaran sensor terhadap perubahan arus di sisi primer yang di-injeksikan. Pengujian dilakukan dengan cara menghubungkan kaki output positif sensor ke kabel positif multimeter digital dan kaki output negatif sensor ke kabel negatif multimeter digital. Arus AC yang di-injeksikan ke sisi primer sensor arus sebesar 1 - 10 amper dengan kenaikan 0.5 amper. Kemudian, tegangan output sensor arus dicatat setiap kenaikan 0.5 amper. Data hasil pengujian tersebut dapat dibuat grafik hubungan antara arus (A AC) dengan tegangan output sensor arus CR 9580-10 (VDC) yang ditunjukkan pada grafik 4.1.
Grafik 4.1 Output sensor arus CR 9580-10 Berdasarkan grafik 4.1, diperoleh persamaan garis y = 0.489x – 0.031, dimana x adalah nilai arus yang di-injeksikan di sisi primer sensor arus dan y adalah tegangan output sensor arus CR 9580-10. Dari grafik tersebut juga dapat diketahui bahwa kenaikan tegangan output
sensor arus CR 9580-10 mengikuti kenaikan arus yang di-injeksikan di sisi primer sensor arus
y = 0.489x - 0.031 R² = 1 0 1 2 3 4 5 0 5 10 V out Se ns or A rus C R 9580 -10 (V D C )
10 4.2. Pengujian Sensor Tegangan
Pengujian sensor tegangan, dilakukan untuk mengetahui respon tegangan keluaran sensor terhadap perubahan tegangan di sisi primer yang di-injeksikan. Pengujian dilakukan dengan cara menghubungkan kaki output positif sensor ke kabel positif multimeter digital dan kaki output negatif sensor ke kabel negatif multimeter digital. Tegangan AC yang di-injeksikan ke sisi primer sensor tegangan sebesar 100 - 400 VAC dengan kenaikan 10 VAC. Kemudian, tegangan
output sensor tegangan dicatat setiap
kenaikan 10 VAC. Data hasil pengujian tersebut dapat dibuat grafik hubungan antara tegangan (VAC) dengan tegangan
output sensor tegangan (VDC) yang
ditunjukkan pada grafik 4.2.
Grafik 4.2 Output sensor tegangan
Berdasarkan grafik 4.2, diperoleh persamaan garis y = 0.014x – 0.702, dimana x adalah nilai tegangan AC yang di-injeksikan di sisi primer sensor tegangan dan y adalah tegangan output
sensor tegangan. Dari grafik tersebut juga dapat diketahui bahwa kenaikan tegangan
output sensor tegangan mengikuti
kenaikan tegangan AC yang di-injeksikan di sisi primer sensor tegangan.
4.3. Pengujian ADC Mikrokontroler ATmega8535
Pengujian ADC mikrokontroler ATmega8535, dilakukan untuk mengetahui respon ADC internal mikrokontroler terhadap tegangan input
tyang diberikan, resolusi ADC dan komunikasi serial dengan komputer dapat berjalan dengan baik. Pengujian ini dilakukan dengan menggunakan rangkaian komunikasi serial mikrokontroler ATmega8535, dengan ditambahkan
resistor variable yang dirangkai sebagai
pembagi tegangan dan dihubungkan ke PA.0 serta VCC. Selain itu, tegangan referensi ADC yang digunakan adalah sebesar 5 VDC dan dihubungkan ke pin AVCC. Tegangan input ADC diatur oleh
resistor variable dengan range 0-5000
mVDC dan bobot biner yang tampil di komputer dicatat sebagai bukti pengujian. Data hasil pengujian tersebut dapat dibuat grafik hubungan antara tegangan input
ADC (mVDC) dengan bobot biner yang ditunjukkan pada grafik 4.3.
Grafik 4.3 Pengujian ADC mikrokontroler ATmega8535
Berdasarkan grafik 4.3, diperoleh persamaan garis y = 4.962x – 5.481, dimana x adalah nilai bobot biner yang tampil di komputer dan y adalah tegangan
input ADC. Dari grafik tersebut juga dapat
diketahui bahwa resolusi ADC yang diperoleh adalah 4.962 mV/bit, hasil yang diperoleh ini mendekati hitungan secara teoritis sebesar 4.88 mV/bit.
4.4. Pengujian Sensor Arus CR 9580-10 pada Komputer
Pengujian ini dilakukan untuk mengetahui respon perubahan bobot biner yang ditampilkan di komputer terhadap perubahan tegangan output sensor arus CR
y = 0.014x - 0.702 R² = 0.999 0 1 2 3 4 5 6 100 200 300 400 V out Se ns or Teg angan (V D C )
Tegangan Primer (VAC)
y = 4.962x - 5.481 R² = 1 0 1000 2000 3000 4000 5000 6000 0 500 1000 1500 V in A D C (m V D C ) Bobot Biner
11 9580-10. Pengujian dilakukan dengan menggunakan rangkaian pengujian ADC mikrokontroler ATmega8535 dengan input
ADC pada PA.0 diganti dengan dihubungkan pada kaki output positif sensor arus dan kaki ground sensor arus dihubungkan ke kaki ground
mikrokontroler ATmega8535. Kemudian, arus AC di-injeksikan ke sisi primer sensor arus dengan range 1 - 10 amper dan kenaikan 0.5 amper. Bobot biner yang tampil di komputer dicatat setiap kenaikan 0.5 amper. Data hasil pengujian tersebut dapat dibuat grafik hubungan antara arus AC yang di-injeksikan di sisi primer sensor arus dengan bobot biner yang tampil di komputer dan ditunjukkan pada grafik 4.4.
Grafik 4.4 Pengujian sensor arus CR 9580-10 pada computer
Berdasarkan grafik 4.4, diperoleh persamaan garis y = 0.01x + 0.072, dimana x adalah nilai bobot biner yang tampil di komputer dan y adalah arus AC yang di-injeksikan di sisi primer sensor arus. Persamaan garis yang diperoleh pada pengujian ini adalah persamaan yang juga akan digunakan di Borland Delphi 7 untuk mengkonversi perubahan nilai bobot biner menjadi arus AC yang terukur sensor arus. 4.5. Pengujian Sensor Tegangan pada
Komputer
Pengujian ini dilakukan untuk mengetahui respon perubahan bobot biner yang ditampilkan di komputer terhadap perubahan tegangan output sensor tegangan. Pengujian dilakukan dengan
menggunakan rangkaian pengujian ADC mikrokontroler ATmega8535 dengan input
ADC pada PA.0 diganti dengan dihubungkan pada kaki output positif sensor tegangan dan kaki ground sensor tegangan dihubungkan ke kaki ground
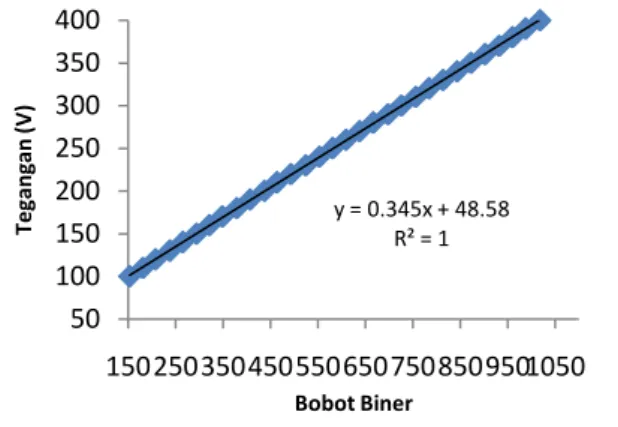
mikrokontroler ATmega8535. Kemudian, tegangan AC di-injeksikan ke sisi primer sensor tegangan dengan range 100 - 400 VAC dan kenaikan 10 VAC. Bobot biner yang tampil di komputer dicatat setiap kenaikan 10 VAC. Data hasil pengujian tersebut dapat dibuat grafik hubungan antara tegangan AC yang di-injeksikan di sisi primer sensor tegangan dengan bobot biner yang tampil di komputer dan ditunjukkan pada grafik 4.5.
Grafik 4.5 Pengujian sensor tegangan pada komputer
Berdasarkan grafik 4.5, diperoleh persamaan garis y = 0.345x + 48.58, dimana x adalah nilai bobot biner yang tampil di komputer dan y adalah tegangan AC yang di-injeksikan di sisi primer sensor tegangan. Persamaan garis yang diperoleh pada pengujian ini adalah persamaan yang juga akan digunakan di Borland Delphi 7 untuk mengkonversi perubahan nilai bobot biner menjadi tegangan AC yang terukur sensor tegangan.
4.6. Pengujian Sistem Keseluruhan Pengujian sistem keseluruhan dilakukan untuk mengetahui bahwa alat yang dibuat dari sisi hardware dan
y = 0.01x + 0.072 R² = 1 0 1 2 3 4 5 6 7 8 9 10 90 190 290 390 490 590 690 790 890 990 A rus (A )
Bobot Biner ADC
y = 0.345x + 48.58 R² = 1 50 100 150 200 250 300 350 400 1502503504505506507508509501050 Teg angan (V ) Bobot Biner
12
software dapat berfungsi dengan baik.
Keberhasilan alat diukur dengan cara mikrokontroler ATmega8535 dapat mengkonversi perubahan tegangan output
sensor menjadi data ADC kemudian mengirimkannya ke komputer dengan komunikasi serial untuk ditampikan di program Borland Delphi 7. Di Borland Delphi 7 data ADC di kalkulasi dengan menggunakan rumus yang diperoleh dari hasil uji sensor arus atau tegangan pada komputer. Kemudian hasil kalkulasi tersebut di tampilkan pada kolom edit dan dalam bentuk grafik di form monitoring. Pada form database data yang ditampilkan akan di-auto saving dengan interval 5 detik ke database Microsoftt Access dan dapat diolah ulang kembali dengan
meng-eksport ke Microsoftt Excel. Jika
dibutuhkan data berupa hardcopy, maka data yang ditampilkan di form database
dapat diprint menggunakan printer.
Pengujian sistem keseluruhan juga telah dilakukan dengan membandingkan pembacaan arus dan tegangan dari alat yang telah dibuat dengan pembacaan alat ukur standar. Untuk pembacaan nilai arus dari sensor CR 9580-10 dibandingkan dengan pembacaan dari digital power
meter WT 130. Sedangkan, untuk
pembacaan tegangan oleh sensor tegangan dibandingkan dengan pembacaan multimeter digital fluke 289. Grafik yang menunjukkan data perbandingan pembacaan arus dan tegangan dari alat yang dibuat dengan alat ukur standar ditunjukkan pada grafik 4.6 dan grafik 4.7.
Grafik 4.6 Grafik perbandingan pembacaan arus dari sensor CR 9580-10
dengan digital power meter WT 130 Berdasarkan grafik 4.6, diperoleh koefisien korelasi linear r = 100%. Hal ini menunjukkan pembacaan arus oleh sensor CR 9580-10 dengan digital power meter
WT 130 adalah sama.
Grafik 4.7 Grafik perbandingan pembacaan tegangan dari sensor tegangan
dengan multimeter digital fluke 289 Berdasarkan grafik 4.7, diperoleh koefisien korelasi linear r = 100%. Hal ini menunjukkan pembacaan arus oleh sensor tegangan dengan multimeter digital fluke
289 adalah sama.
Pengambilan data telah dilakukan pada tanggal 31 maret 2015, yang bertempat di ruang MCC Boiler unit 5 PLTU Suralaya. Object motor induksi tiga fasa yang diukur arus dan tegangannya adalah motor mill lube oil C1 dan mill lube oil D2. Pengambilan data dimulai pukul 14:04 PM sampai pukul 14:29 PM dan diperoleh data arus dan tegangan sebanyak 260 data. Berikut ini adalah tampilan dari program aplikasi yang telah dibuat saat pengambilan data. y = x R² = 1 0 2 4 6 8 10 12 0 5 10 15 A rus S e ns or C R 9580 -10 (A A C )
Arus Digital Power Meter WT 130 (A AC)
y = 1.000x + 0.272 R² = 1 0 100 200 300 400 0 200 400 Teg angan Se ns or Teg angan (V A C )
13 Gambar 4.1 Tampilan form monitoring
saat pengambilan data
Pada gambar 4.1 merupakan tampilan dari form monitoring sebelum pengambilan data dimulai. Tampilan grafik dan kolom edit belum menunjukkan data arus dan tegangan motor induksi tiga fasa yang dimonitor. Sebelum pengambilan data dimulai perlu dilakukan penentuan port komunikasi serial yang akan digunakan. Penentuan port serial tersebut dapat dilakukan dengan memilih
button setting.
Gambar 4.2 Tampilan formdatabase saat pengambilan data
Pada gambar 4.2, terlihat data
ter-record terdiri dari Tanggal, Waktu,
Amp1_R, Amp1_S, Amp1_T, Volt1, Amp2_R, Amp2_S, Amp2_T dan Volt2. Pada form database dilengkapi fasilitas data kontrol yang memudahkan dalam melakukan navigasi pada database dan mengontrol jumlah data yang ter-record. Fasilitas data searching juga disediakan pada form ini yang memudahkan dalam
melakukan pencarian data yang diinginkan berdasarkan Tanggal, Waktu, Amp1_R, Amp1_S, Amp1_T, Volt1, Amp2_R, Amp2_S, Amp2_T dan Volt2.
Gambar 4.3 Tampilan database Microsoftt Access dengan data ter-record
Pada database Microsoft Access data arus dan tegangan motor induksi tiga fasa yang dimonitor di simpan di tabel motor.
Interval penyimpanan data pada database
ini adalah setiap 5 detik dan dapat diubah sesuai kebutuhan di form database.
Gambar 4.4 Tampilan Microsoft Excel dengan data ter-record
Data yang ditampilan pada Microsoft Excel merupakan data yang ter-record di
form database. Di Microsoft Excel data
dapat diolah kembali dengan menggunakan formula matematis yang disediakan Microsoft Excel guna menunjang analisis data.
14 Gambar 4.5 Tampilan print preview data
yang ter-record
Dengan disediakannya fasilitas cetak pada
form database, maka data yang ter-record
dapat dicetak menggunakan printer. Pada gambar 4.5 menunjukkan preview laporan
database dari arus dan tegangan motor
induksi tiga fasa yang dimonitor dan siap untuk dicetak.
5. Kesimpulan dan Saran 5.1. Kesimpulan
Dari penelitian yang telah dilakukan dalam merancang dan merealisasikan alat monitoring arus dan tegangan multichannel motor induksi tiga fasa menggunakan mikrokontroler ATmega8535, dapat ditarik beberapa kesimpulan, diantaranya :
1. Alat monitoring arus dan tegangan
multichannel motor induksi tiga fasa
menggunakan mikrokontroler ATmega8535 telah berhasil direalisasikan dengan pembacaan alat memiliki koefisien korelasi linear sebesar r = 100 % terhadap digital power meter WT 130 untuk pembacaan arus listrik dan multimeter digital fluke 289 untuk pembacaan tegangan listrik.
2. Borland Delphi 7 dapat berkomunikasi secara serial dengan mikrokontroler ATmega8535 dengan menggunakan protokol RS-232 untuk memonitoring arus dan tegangan multichannel motor induksi tiga fasa.
3. Dengan menggunakan komponen ADO pada Borland Delphi 7, data
arus dan tegangan yang dimonitoring dapat disimpan dengan baik di Microsoft Access dengan interval auto
saving data yang dapat diatur sesuai
keinginan. Data yang ter-record
meliputi Tanggal, Waktu, Amp1_R, Amp2_S, Amp1_T, Volt1, Amp2_R, Amp2_S, Amp2_T dan Volt2.
4. Dari data pengujian sensor arus CR 9580-10 didapatkan hasil bahwa setiap kenaikan 1 A AC, output sensor arus naik 0.25 VDC.
5. Dari data pengujian sensor tegangan didapatkan hasil bahwa setiap kenaikan 10 VAC, output sensor tegangan naik 0.15 VDC.
6. Dari data pengujian ADC internal mikrokontroler ATmega8535 diperoleh resolusi setiap kenaikan 1 bit sebesar 4.962 mVDC/bit, mendekati perhitungan teoritis sebesar 4.88mVDC/bit. Perbedaan ini diakibatkan tegangan input maksimal uji ADC internal mikrokontroler ATmega8535 tidak murni actual 5.0 VDC.
5.2. Saran
1. Basis data dapat dikembangkan dengan menggunakan database seperti
oracle atau mySQL untuk
penyimpanan data dengan kapasitas lebih besar sehingga penyimpanan data dapat dilakukan secara real time.
2. Perlu dikembangkan lagi agar alat dapat menampilkan bentuk gelombang sinusoidal dari tegangan motor induksi tiga fasa yang dimonitoring sehingga dapat diamati pula jika timbul harmonisa tegangan
DAFTAR PUSTAKA
[1] Anonim. 2003. Datasheet AVR
ATmega8535. San Jose: Atmel Corp.
[2] Anonim. 2005. Datasheet Current
Sensor CR9500 Series. St. Louis MO :
CR Magnetic Inc.
[3] Anonim, 2005. Potential Transformer. Jakarta : PT PLN (Persero) P3B.
15 [4] Arifianto, B. 2009. Modul Training
Microcontroller For Beginer.
http://www. max-tron.com diunduh tanggal 5/3/2015.
[5] Fakhrizal R., Sukmadi T., dan Facta M., 2007. Aplikasi Programmable
Logic Controller (PLC) pada
Pengahasutan dan Proteksi Bintang –
Segitiga Motor Induksi Tiga Fasa.
Semarang: Jurusan Teknik Elektro UNDIP.
[6] Husni. 2004. Pemrograman Database
Dengan Delphi. Yogyakarta: Graha
Ilmu.
[7] Madcoms. 2003. Pemrograman
Borland Delphi 7 (Jilid 1).
Yogyakarta: Andi.
[8] Mangkulo, H, A. 2004. Pemrograman Database Menggunakan Delphi 7.0
Dengan Metode ADO. Jakarta: PT.
Elex Media Komputindo.
[9] Musa, P. 2009. Cara Menginstall
Komponen CportLib di Borland
Delphi 7.
http://purnawarmanmusa.blogsome.co m diunduh tanggal 21/1/2015.
[10] Suryawan D. W., Sudjadi, dan karnoto. 2012. Rancang Bangun Sistem Monitoring Tegangan, Arus dan Temperatur pada Sistem Pencatu Daya Listrik di Teknik Elektro
Berbasis Mikrokontroler ATmega128.
Semarang: Jurusan Teknik Elektro UNDIP.
[11] Tanoto, 2009. Transformer. http://tanotocentre.wordpress.com/200 9/ 06/06/ transformator/ diunduh tanggal 21/1/2015.
[12] Wahana, K. 2006. Teknik Antarmuka Mikrokontroller Dengan Komputer
Berbasis Delphi. Semarang: Salemba
Infotek.
[13] Wardhana, L. 2006. Belajar Sendiri
Mikrokontroler AVR Seri
ATmega8535 Simulasi, Hardware,
dan Aplikasi. Yogyakarta: Andi.
[14] Wibowo O. K., dan Nugroho A. 2012.
Pemeliharaan Trafo Arus (CT) Pada Gardu Induk Krapyak 150 KV PT. PLN (PERSERO) P3B Jawa-Bali APP
Semarang. Semarang: Jurusan Teknik
Elektro UNDIP.
[15] Zaini, Rusdi E. 2013. Monitoring
Motor Induksi Tiga Fasa
Menggunakan Software Labview
Berbasis Webserver. Padang: Jurusan
Teknik Universitas Andalas.
[16] Zhanggischan, Z. 2004. Prinsip Dasar
Elektroteknik. Jakarta: PT. Gramedia
Pustaka Utama.