TUGAS AKHIR
Oleh
FLAMY PUSPA NUGRAHENI
2013 301 0036
PROGRAM STUDI D3 TEKNIK ELEKTROMEDIK
PROGRAM VOKASI
UNIVERSITAS MUHAMMADIYAH YOGYAKARTA
TUGAS AKHIR
Oleh
FLAMY PUSPA NUGRAHENI
2013 301 0036
PROGRAM STUDI D3 TEKNIK ELEKTROMEDIK
PROGRAM VOKASI
UNIVERSITAS MUHAMMADIYAH YOGYAKARTA
ii
TUGAS AKHIR
Ditunjukan Kepada Universitas Muhammadiyah Yogyakarta Untuk Memenuhi Sebagian Persyaratan Guna Memperoleh Gelar Ahli Madya (A.Md)
Program Studi Teknik Elektromedik
Oleh :
Flamy Puspa Nugraheni
NIM. 2013 301 0036
PROGRAM STUDI D3 TEKNIK ELEKTROMEDIK
PROGRAM VOKASI
UNIVERSITAS MUHAMMADIYAH YOGYAKARTA
iii
Penulis menyatakan bahwa dalam Tugas Akhir ini tidak terdapat karya yang pernah diajukan untuk memperoleh derajat Profesi Ahli Madya atau gelar kesarjanaan pada suatu perguruan tinggi dan sepanjang pengetahuan penulis juga tidak terdapat pendapat yang pernah ditulis atau diterbitkan oleh orang lain, kecuali yang secara tertulis diacu dalam naskah ini serta disebutkan dalam daftar pustaka.
Yogyakarta, 22 Oktober 2016
Yang menyatakan,
Flamy Puspa Nugraheni
iv
Alhamdulillah, Puji syukur kami panjatkan kehadirat Allah SWT, yang telah memberikan taufik dan hidayahnya berupa akal pikiran sehingga penulis
dapat menyelesaikan Tugas Akhir dengan judul “SIMULASI THERAPY
MASSAGE BERBASIS MICROCONTROLLER ATMega8535”. Laporan
Tugas Akhir ini disusun sebagai syarat untuk mendapatkan kelulusan dengan gelar Ahli Madya (A.Md).
Shalawat serta salam semoga senantiasa tercurah kepada Rasulullah Muhammad SAW dan para sahabatnya yang telah menunjukan jalan kebenaran berupa keislaman serta menjauhkan kita dari zaman kebodohan dan menuntun kita menuju zaman yang terang dan penuh ilmu pengetahuan seperti sekarang ini. Semoga beliau selalu menjadi suri tauladan dan sumber inspirasi bagi kita semua. Dalam melakukan penelitian dan penyusunan laporan tugas akhir ini penulis mendapat banyak bantuan dalam bentuk saran, dorongan, dan bimbingan dari banyak pihak. Oleh karena itu dengan segala hormat dan kerendahan hati perkenankan penulis mengucap banyak terimakasih kepada :
1. Bapak Dr. Sukamta, S.T., M.T., selaku Direktur Program Vokasi Universitas Muhammadiyah Yogyakarta dan Bapak Tatiya Padang Tunggal, S.T. selaku Kepala Program Studi Teknik Elektromedik yang telah memberikan izin kepada penulis untuk belajar.
v
3. Para Dosen Program Studi Teknik Elektromedik Universitas Muhammadiyah Yogyakarta yang telah memberikan bekal ilmu kepada penulis.
4. Para Karyawan/wati Program Studi Teknik Elektromedik Universitas Muhammadiyah Yogyakarta yang telah membantu penulis dalam proses belajar.
5. Keluarga, Bapak Hamid Siswanto dan Ibu Liswati terima atas kasih sayang, doa, dukungan, dan bimbingan yang tidak pernah ada kata lelah dan bosan.
“Terimakasih telah menjadi panutan, menjadi guru, merawat tanpa pamrih dari
penulis lahir sampai waktu sekarang ini”. Untuk kakak tercinta Lanjar Annas Pambayun terima kasih telah memberikan banyak motivasi sehingga karya tulis ini dapat terwujud, dan untuk adik tersayang Humanika Anbi Yudha maaf kalau selama ini belum bisa jadi panutan kakak yang baik. Terakhir untuk kakak ipar tercinta Anisa Wahyu Tri Utami terima kasih atas semua dukungan yang telah diberikan.
6. Seluruh Teman-teman angkatan 2013 Teknik Elektromedik Universitas Muhammadiyah Yogyakarta yang banyak memberikan masukan-masukan dan semangat serta dorongan kepada penulis “SEMOGA KITA SELALU DIDALAM JALAN KESUKSESAN! AMIIIN.
vi
Penulis menyadari sepenuhnya bahwa laporan Tugas Akhir ini masih jauh dari sempurna, untuk itu semua jenis saran, kritik dan masukan yang bersifat membangun sangat penulis harapkan. Akhir kata, semoga tulisan ini dapat memberikan manfaat dan memberikan wawasan tambahan bagi para pembaca dan khususnya bagi penulis sendiri.
Yogyakarta, Oktober 2016
vii
DAFTAR ISI ... ix
DAFTAR TABEL ... xi
DAFTAR GAMBAR ... xii
ABSTRAK ... xiii
ABSTRACT ... xiv
BAB I PENDAHULUAN...1
1.1 Latar Belakang ... 1
1.2 Perumusan Masalah... 2
1.3 Pembatasan Masalah ... 2
1.4 Tujuan Penelitian... 2
1.4.1 Tujuan umum... 2
1.4.2 Tujuan khusus... 2
1.5 Manfaat Penelitian... 3
1.5.1 Manfaat Teoritis... 3
1.5.2 Manfaat Praktis... 3
BAB II TINJAUAN PUSTAKA ... 4
2.1 Kajian Pustaka... .... 4
2.2 Therapy Massage ... 4
2.3 Teknik Pemijat ... 10
2.4 Microcontroller ATMega8535 ... 12
2.5 Motor DC ... 14
2.6 Tombol Pemilihan (Push Button) ... 16
2.7 Liquid Crystal Display (LCD)2X16 ... 17
BAB III METODE PENELITIAN... 21
3.1 Alat dan Bahan... 21
3.1.1 Alat... 21
3.1.2 Bahan...21
viii
3.4.2 Rancang Bangun Modul... 25
3.4.3 Pembuatan Casing Box... 27
3.4.4 Perakitan Rangkaian Power Supply... 29
3.4.5 Perakitan Rangkaian LED... 30
3.5 Perancangan Perangkat Lunak ... 31
3.5.1 Diagram Alir Program... 31
3.5.2 Listing Program Timer....... 33
3.5.3 Jenis Penelitian... 34
BAB IV HASIL DAN PEMBAHASAN... . 37
4.1 Prosedur Pemakaian ... 37
4.2 Prosedur Pemakaian... 38
4.3 Kelebihan dan Kekurangan... 38
4.3.1 Kelebihan... 38
4.3.2 Kekurangan... 39
4.4 Pengujian dan Hasil Pengujian Timer ... 39
4.5 Hasil Perhitungan Rata-rata Timer ... 43
4.6 Data Pengukuran Tegangan pada Modul ... 43
4.7 Analisa Data ... 45
4.7.1 Saat Motor Low... 45
4.7.2 Saat Motor Medium... 46
4.7.3 Saat Motor High... 46
4.8 Akurasi Data... 47
4.8.1 Akurasi data pada pengukuran timer... 47
4.8.2 Akurasi data pada pengukuran tegangan motor... 48
BAB V KESIMPULAN DAN SARAN ... 49
5.1 Kesimpulan... 49
5.2 Saran ... 50
DAFTAR PUSTAKA ... 51
ix
Tabel 2.2 Spesifikasi Port B... 13
Tabel 2.3Spesifikasi Port C... 13
Tabel 2.4Spesifikasi Port D... 14
Tabel 2.5Spesifikasi Pin LCD 2 x 16... 19
Tabel 4.1 Hasil Pengukuran Modul Timer 5 menit... 39
Tabel 4.2 Hasil Pengukuran Modul Timer 10 menit... 40
Tabel 4.3 Hasil Pengukuran Modul Timer 15 menit... 41
Tabel 4.4 Data pengukuran rata-rata keseluruhan timer... 43
Tabel 4.5 Hasil Pengukuran Tegangan Posisi MotorLow, Mdium, High... 43
x
Gambar 2.1 Letak penyakit lower back pain...7
Gambar 2.2 Vertebral Column...8
Gambar 2.3 Konfigurasi pin ATMega8535...12
Gambar 2.4 Skema MotorDC...16
Gambar 2.5 Tombol pemilihan...17
Gambar 2.6 Skematik LCD 2x16...20
Gambar 3.1 Alur Penelitian...23
Gambar 3.2 Diagram Blok Sistem...24
Gambar 3.3 Rancang Bangun Modul...26
Gambar 3.4 Modul box...28
Gambar 3.5 Sistematika Modul Rangkaian Power Supply...29
Gambar 3.6 Layout PCB Power Supply...29
Gambar 3.9 Sistematika Modul Rangkaian LED...30
Gambar 3.10Layout PCBLED...30
Gambar 3.11 Diagram alir program...31
LAMPIRAN
1. Spesifikasi Modul
2. Listing Program Keseluruhan Modul
3. Data Sheet Microcontroller ATMega8535 4. Data Sheet Diode IN4007
5. Data Sheet IC Regulator 7805 6. Data Sheet LCD 16X2
7. Kartu Bimbingan Tugas Akhir
xiii
Program Study DIII Teknik Elektromedik
Program Vokasi
Universitas Muhammadiyah Yogyakarta
ABSTRAK
Lower back pain (LBP) adalah nyeri yang dirasakan didaerah punggung bagian bawah, Kesulitan saat menegakkan badan setelah membungkuk karena timbulnya rasa kaku atau rasa sakit adalah gejala atau keluhan yang sangat sering terjadi dari masalah nyeri punggung bawah atau lower back pain (LBP).
Untuk mengatasi masalah tersebut maka penulis membuat simulasi alat terapi yang dapat mengatasi penyakit lower back pain (LBP). Alat
tersebut adalah “Simulasi Therapy Massage Berbasis Microcontroller ATMega8535”, dengan pijatan yang memanfaatkan getaran motor yang dapat menjadi solusi dalam mengatasi masalah tersebut.
Setelah melalui proses study literatur dan eksperimen “Simulasi Therapy Massage Berbasis Microcontroller ATMega8535” melakukan keakurasian timer dengan stopwatch. Akurasi hasil pengukuran timer yang dilakukan adalah sebesar 99,94%, dengan error sebesar 0,06%.
xiv
Program Study DIII Teknik Elektromedik
Program Vokasi
Universitas Muhammadiyah Yogyakarta
ABSTRACT
Lower back pain ( LBP ) is pain felt lower back area . Difficulties when straightened after bending due to the onset of numbness or pain is a symptom or complaint is very common on the problem of lower back pain or lower back pain ( LBP ) .
To overcome these problems, the author makes a simulation tool that can overcome disease therapy lower back pain ( LBP ). To overcome these problems, the author makes a simulation tool that can overcome disease therapy lower back or Lower Back Pain ( LBP )
The tool is a " Simulation Therapy Massage Based Microcontroller ATMega 8535 " , with a massage that utilizes vibration motor can be a solution to overcome these problems .
After a thorough study of literature and experimental " Simulation Therapy Massage Based Microcontroller ATMega 8535 " perform the accuracy of timer with stopwacth. Accuracy of the results of measurements performed timers amounted to 99.94%, with an error of 0.06%.
PENDAHULUAN
1.1 Latar Belakang
Lower back pain (LBP) adalah nyeri yang dirasakan didaerah punggung bawah,
Kesulitan saat menegakkan badan setelah membungkuk karena timbulnya rasa kaku atau rasa sakit adalah gejala / keluhan yang sangat sering terjadi dari masalah nyeri punggung bawah atau lower back pain. Berdasarkan prevalensi nyeri punggung di Inggris pada tahun 1993 sekitar 16 juta populasi penyakit lower back pain semakin meningkat. Pada pengambilan data sekitar 80% manusia dalam perjalanan hidupnya pernah menderita lower back pain. Lower back pain merupakan diagnosa yang paling sering dibuat oleh dokter, sekitar 90% penderita lower back pain akut maupun kronis adalah jinak dan dapat sembuh dalam waktu 4-6 minggu. Namun cenderung berulang sekitar 15-20 %.
Menurut Sahala (2014) pada penanganan penyakit ini dilakukan dengan cara terapi antiinflamasi, fisioterapi, dan olahraga lower impact (berenang), namun cara tersebut dapat efektif 4-6 minggu dalam mengatasi masalah lower back pain. Berdasarkan hasil identifikasi tersebut, maka penulis ingin mengembangkan kinerja alat fisioterapi dalam mengatasi penyakit punggung bagian bawah atau lower back
pain. Pada tugas akhir ini dibuat “Simulasi Therapy Massage Berbasis
MicrocontrollerATMega8535” dilengkapi dengan pengaturan waktu.
1.2 Perumusan Masalah
Belum tersedianya alat terapi yang efektif dalam mengatasi masalah lower back pain.
Agar dalam pembahasan alat ini tidak terjadi pelebaran masalah dalam penyajiannya, maka penulis membatasi pokok-pokok batasan yang akandibahas yaitu: 1. Pergerakan pijatan diarea punggung bagian bawah untuk mengatasi penyakit
lower back pain.
2. Proses pemijatan terdiri dari 3 pemilihan lama waktu yaitu 5 menit, 10 menit,dan 15 menit.
3. Kecepatan motor terdiri dari 3 pemilihan yaitu Low,Medium,High.
1.4 Tujuan Penelitian
1.4.1 Tujuan Umum
Mensimulasikan alat therapy dengan sistem microcontroller ATMega8535 yang digunakan sebagai salah satu alternative alat terapi pada penyakit lower back pain.
1.4.2 Tujuan Khusus
Setelah menganalisa permasalahan yang ada, tujuan khusus pembuatan alat ini antara lain :
1. Membuat sebuah alat therapy dengan sistem microcontroller
ATMega8535.
2. Mengukur lamanya proses pemijatan dengan menggunakan timer dengan waktu maksimal untuk therapy adalah 15 menit.
1.5 Manfaat Penelitian
alat terapi lower back pain bagi mahasiswa khususnya mahasiswa jurusan Teknik Elektromedik Universitas Muhammadiyah Yogyakarta.
1.5.2 Manfaat Praktis
BAB II
TINJAUAN PUSTAKA
2.1. Kajian Pustaka
Berdasarkan penelitian Octariani (2006) dengan judul Health Massage
Therapy. Alat yang digunakan berbasis microcontroller AT89s51,
dilengkapi dengan heater dan setting timer sebagai pengatur waktu, serta menggunakan LCD 16x2 sebagai display. Alat tersebut sudah cukup baik untuk dijadikan alat terapi, kekurangan alat ini yaitu hanya untuk terapi relaksasi.
Berdasarkan penelitian Yunita (2006) dengan judul Alat Therapeutic
Apparatus alat yang digunakan berbasis microcontroler ATMega 8 sebagai
pengendali, dilengkapi settingtimer sebagai pengatur waktu dan LCD 16x2 sebagai display. Alat tersebut sudah cukup baik untuk dijadikan alat terapi, kekurangan alat ini hanya untuk terapi akupuntur belum tertuju pada penyakit lower back pain.
2.2. Therapy Massage
Menurut Wahyono (2009) lower back pain (LBP) adalah nyeri yang dirasakan didaerah punggung bawah, dapat merupakan nyeri local maupun nyeri radikuler atau keduanya. Nyeri yang berasal dari daerah punggung bawah dapat menuju ke daerah lain atau sebaliknya ,nyeri yang berasal dari daerah lain dirasakan di daerah punggung bawah ( reffered pain / nyeri yang menjalar ). Kesulitan saat menegakkan badan setelah membungkuk
karena timbulnya rasa kaku atau rasa sakit adalah gejala atau keluhan yang sangat sering terjadi dari masalah nyeri punggung bawah atau lower back
pain. Nyeri bersifat sangat subjektif serta mempunyai manifestasi yang
unik untuk masing-masing individu. Nyeri merupakan pengalaman yang kompleks yang melibatkan beberapa dimensi, yaitu :
1. Dimensi fisiologis, meliputi lokasi, onzet, durasi, etiologi dan
syndrome.
2. Dimensi sensoris yang meliputi intensitas, kualitas dan pola nyeri. 3. Dimensi afektif yang meliputi suasana hati, ketidaknyamanan,
depresi dan kesejahteraan.
4. Dimensi kognitif meliputi pengertian nyeri, pandangan diri terhadap nyeri, strategi dan kemampuan menanggulangi nyeri, perilaku dan keyakinan serta faktor-faktor yang mempengaruhi nyeri itu sendiri. 5. Dimensi behavioural yang meliputi komunikasi, interaksi
interpersonal, aktifitas fisik.
6. Dimensi sosiokultural dan etnokultural yang meliputi kehidupan keluarga dan sosial, responsibility di rumah dan di tempat kerja, rekreasi dan leisure, faktor lingkungan dan pengeruh sosial.
Menurut Waddell (1993) apabila saat duduk nyeri bertambah, maka gerak fleksi pasti juga bertambah nyeri. Sehingga aktifitas mengangkat, memutar dan menekuk vertebrae berakibat nyeri bertambah pula, serta disertai terjadinya nyeri menjalar hingga bawah lutut. Hal itu menunjukkan letak cideranya adalah discus. Menurut Hall (1992) problem pada discus
lutut. Dengan demikian akan terdapat nyeri pada punggung bawah dan tungkai, yang mana nyeri pada tungkai lebih dominan. Bila berbaring (terutama tengkurap) nyeri bertambah, berarti ekstensi juga meningkatkan nyeri. Bila tengkurap meningkatkan nyeri kemungkinan LBP neurogenic
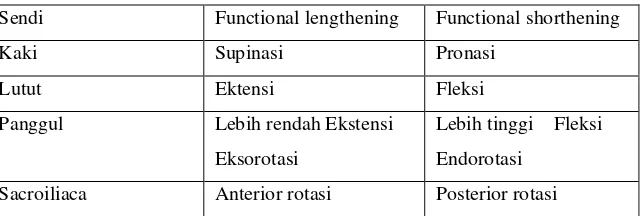
atau lesi intervertebrae seperti pada Tabel 2.1 yang menunjukan function
limb lenght difference sebagai berikut.
Tabel 2.1 Functional limb length difference.
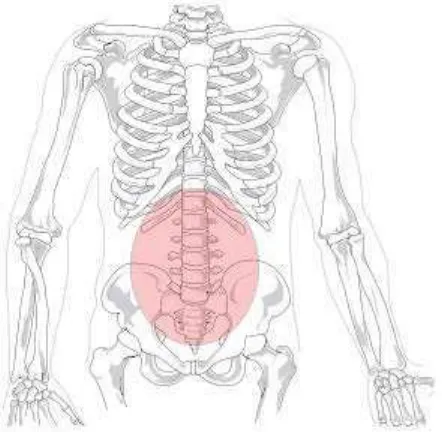
Pada umumnya timbulnya rasa sakit pada pinggang bagian bawah disebabkan karena adanya tekanan pada susunan saraf tepi daerah pinggang atau saraf terjepit seperti yang ditunjukan lingkarang merah pada Gambar 2.1 adalah letak penyakit lower back pain.
Sendi Functional lengthening Functional shorthening
Kaki Supinasi Pronasi
Lutut Ektensi Fleksi
Panggul Lebih rendah Ekstensi
Eksorotasi
Lebih tinggi Fleksi
Endorotasi
Gambar 2.1 Letak penyakit lower back pain
Jepitan pada saraf ini dapat terjadi karena : 1. Gangguan pada otot dan jaringan sekitarnya 2. Gangguan pada saraf tulang belakang
3. Trauma tulang belakang, dan kelainan tulang belakang
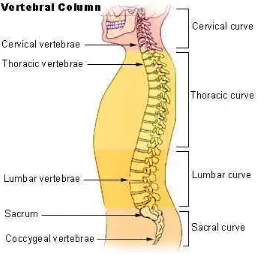
LBP juga dapat terjadi karena kelainan di tempat lain, misalnya infeksi batu ginjal, kehamilan, masalah pada organ reproduksi, dan tumor yang terjadi lokal pada tulang pinggang, namun mengalami penyebaran ke tulang belakang. Gejala LBP antara lain nyeri otot, nyeri menusuk atau tajam, rasa tidak nyaman atau nyeri di daerah pinggang, nyeri yang menjalar ke tungkai bawah sampai ke kaki, fleksibilitas atau rentang gerak sendi punggung terbatas, serta kesulitan untuk berdiri tegak. Gejala LBP terletak pada sekeliling lumbar curve atau lebih tepatnya pada lumbar vertebrae
Gambar 2.2 Vertebral Column
menangani penyakit lower back pain yaitu dengan terapi pijat, terapi pijat yang dilakukan antara lain:
1. Pijatan yang dilakukan diarea lumbarcurve.
2. Proses lamanya waktu pemijatan maksimal 15 menit.
3. Terapi dilakukan 2-3 minggu untuk menghilangkan penyakit lower back pain.
Namun, dari penanganan di atas untuk menunjang dan memperbaiki kualitas hidup pasien agar tidak terjadi penyakit pada punggung bagian bawah maka perlu dilakukan diantaranya:
1. olahraga yang teratur, khususnya berenang
2. mengatur asupan dengan menghindari makanan-makanan yang mengandung banyak lemak dan asam urat untuk memperlambat terjadinya pengapuran tulang belakang
3. mencegah terjadinya kelebihan berat badan
4. hidup yang teratur dan menghindari stres
Apabila terdapat kelainan anatomi pada struktur tulang belakang maka perlu dipertimbangkan tindakan operatif untuk memperbaiki kelainan anatomi atau struktur tulang belakang yang menimbulkan keluhan pasien. Tindakan operatif dapat dipertimbangkan bila:
1. keluhan nyeri dan tidak nyaman tersebut tidak juga berkurang atau membaik setelah program penatalaksanaan konservatif
2. terjadi gangguan fungsi saraf akibat kelainan struktur tulang belakang
3. terjadi perubahan struktur tulang belakang yang berpotensi menimbulkan
2.3. Teknik Pemijatan
Teknik pemijatan ini sangat penting dalam alat therapy massage. Pada alat terapi ini terdapat mekanik pijat berbentuk bulat dan digunakan untuk memijat pada punggung bagian bawah. Untuk lebih membuat pengguna lebih nyaman mekanik pemijat ini desain sedemikian rupa sehingga pada saat digunakan alat ini mampu memijat bagian punggung secara nyaman dan tidak menimbulkan rasa sakit ataupun melukai pengguna, sehingga mampu mengobati sakit pada punggung bagian bawah atau lower back pain. Alat ini tidak membutuhkan ruang tertentu dalam penggunaanya, dapat dilakukan disemua tempat. Pada proses terapi teknik pemijatan yang dilakukan menggunakan teknik fanning, yaitu memberikan pijatan pada kedua sisi tulang belakang punggung bagian bawah antara lain:
1. Pastikan untuk memijat di kedua sisi tulang belakang, bukan pada tulang belakang itu sendiri. Memijat tulang belakang bisa menyebabkan rasa tidak nyaman serta sangat berbahaya jika dilakukan dengan tidak benar.
2. Hindari memberikan tekanan kuat pada tulang belakang.
3. Selalu pijat punggung bagian bawah dengan lembut. Ingatlah bahwa tidak ada tulang rusuk yang melindungi organ-organ dalam tubuh dari tekanan pijatan.
4. Hindari kulit yang terluka, melepuh, atau bagian yang mungkin terinfeksi lainnya.
6. Proses pemijatan dilakukan dengan maksimal waktu selama 15 menit.
2.4. Microcontroller ATMega8535
Microcontroler adalah IC yang dapat diprogram berulang kali, baik
ditulis atau dihapus Bejo (2007). Microcontroler dibuat semakin kompak dengan bahasa pemrograman yang juga ikut berubah. Salah satunya adalah
microcontroler AVR (alf and vegard’s risc processor) ATmega8535 yang
menggunakan teknologi RISC (reduce instruction set computing) dimana program berjalan lebih cepat karena hanya membutuhkan satu siklus clock
untuk mengeksekusi satu instruksi program. Secara umum, AVR dapat dikelompokkan menjadi 4 kelas, yaitu kelas ATtiny, keluarga AT90Sxx, keluarga ATmega, dan AT86RFxx. Pada dasarnya yang membedakan masing-masing kelas adalah memori, peripheral, dan fungsinya. Dari segi arsitektur dan instruksi yang digunakan, mereka bisa dikatakan hampir sama. microcontroler AVR ATmega8535 memiliki fitur yang cukup lengkap. microcontroler AVR ATmega8535 telah dilengkapi dengan ADC
internal, EEPROM internal, Timer/Counter, PWM, analog comparator, dll
(M.Ary Heryanto, 2008). Sehingga dengan fasilitas yang lengkap ini memungkinkan kita belajar microcontroler keluarga AVR dengan lebih mudah dan efisien, serta dapat mengembangkan kreativitas penggunaan
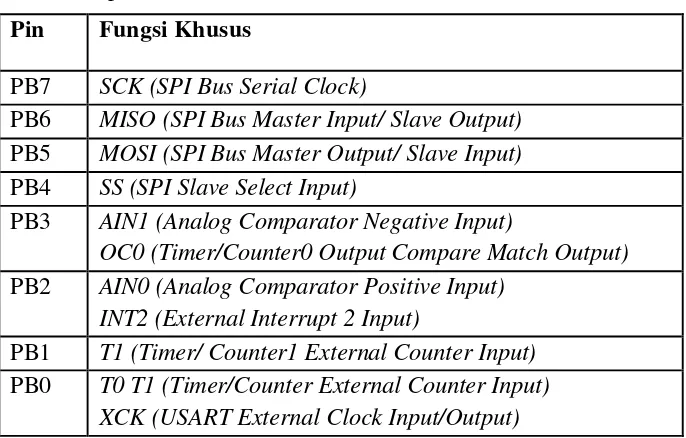
Gambar 2.3 Konfigurasi pin ATMega8535
Konfigurasi pin ATmega8535 dengan kemasan 40 pin DIP (Dual
Inline Package) dapat dilihat pada Gambar 2.1. Dari gambar 2.1 dapat
dijelaskan fungsi dari masing-masing pin Atmega8535 sebagai berikut: 1. VCC merupakan pin yang berfungsi sebagai masukan catu daya. 2. GND merukan pin Ground.
3. Port A (PortA0…PortA7) merupakan pin input/output dua arah dan
pin masukan ADC.
4. Port B (PortB0…PortB7) merupakan pin input/output dua arah dan
Tabel 2.2 Spesifikasi Port B.
5. Port C (PortC0…PortC7) merupakan pin input/output dua arah dan
pin fungsi khusus, seperti dapat dilihat pada Tabel 2.3. Tabel 2.3 Spesifikasi PORT C.
6. Port D (PortD0…PortD7) merupakan pin input/output dua arah dan
pin fungsi khusus, seperti yang terlihat pada Tabel 2.4.
Pin Fungsi Khusus
PB7 SCK (SPI Bus Serial Clock)
PB6 MISO (SPI Bus Master Input/ Slave Output)
PB5 MOSI (SPI Bus Master Output/ Slave Input)
PB4 SS (SPI Slave Select Input)
PB3 AIN1 (Analog Comparator Negative Input)
OC0 (Timer/Counter0 Output Compare Match Output)
PB2 AIN0 (Analog Comparator Positive Input) INT2 (External Interrupt 2 Input)
PB1 T1 (Timer/ Counter1 External Counter Input)
PB0 T0 T1 (Timer/Counter External Counter Input) XCK (USART External Clock Input/Output)
Pin Fungsi khusus
PC7 TOSC2 ( Timer Oscillator Pin2)
PC6 TOSC1 ( Timer Oscillator Pin1)
PC5 Input/Output
PC4 Input/Output
PC3 Input/Output
PC2 Input/Output
PC1 SDA ( Two-wire Serial Buas Data Input/Output Line)
Tabel 2.4 Spesifikasi PORT D
7. RESET merupakan pin yang digunakan untuk me-reset
mikrokontroler.
8. XTAL1 dan XTAL2 merupakan pin masukan clock eksternal.
9. AVCC merupakan pin masukan tegangan untuk ADC.
10. AREFF merupakan pin masukan tegangan referensi ADC.
2.5 Motor DC
Motor DC fahmi (2014) adalah piranti elektronik yang mengubah energi listrik menjadi energi mekanik berupa gerak rotasi. Pada motor DC
terdapat jangkar dengan satu atau lebih kumparan terpisah. Tiap kumparan berujung pada cincin belah (komutator). Dengan adanya insulator antara komutator, cincin belah dapat berperan sebagai saklar kutub ganda (double
pole, double throw switch). Motor DC bekerja berdasarkan prinsip gaya
Lorentz, yang menyatakan ketika sebuah konduktor beraliran arus
diletakkan dalam medan magnet, maka sebuah gaya (yang dikenal dengan gaya Lorentz) akan tercipta secara ortogonal diantara arah medan magnet dan arah aliran arus. Motor DC jenis ini memiliki dua buah magnet permanen sehingga timbul medan magnet di antara kedua magnet tersebut.
Pin Fungsi khusus
PD7 OC2 (Timer/Counter Output Compare Match Output)
PD6 ICP (Timer/Counter1 Input Capture Pin)
PD5 OC1A (Timer/Counter1 Output Compare A Match Output)
PD4 OC1B (Timer/Counter1 Output Compare B Match Output)
PD3 INT1 (External Interrupt 1 Input)
PD2 INT0 (External Interrupt 0 Input)
PD1 TXD (USART Output Pin)
Di dalam medan magnet inilah jangkar/rotor berputar. Jangkar yang terletak di tengah motor memiliki jumlah kutub yang ganjil dan pada setiap kutubnya terdapat lilitan. Lilitan ini terhubung ke area kontak yang disebut
komutator. Sikat (brushes) yang terhubung ke kutub positif dan negatif
motor memberikan daya ke lilitan sedemikian rupa sehingga kutub yang satu akan ditolak oleh magnet permanen yang berada di dekatnya, sedangkan lilitan lain akan ditarik ke magnet permanen yang lain sehingga menyebabkan jangkar berputar. Ketika jangkar berputar, komutator
digunakan untuk mengendalikan kecepatan motor DC adalah dengan teknik modulasi lebar pulsa atau Pulse Width Modulation (PWM). Motor DC
merupakan jenis motor yang menggunakan tegangan searah sebagai sumber tenaganya. Dengan memberikan beda tegangan pada kedua terminal tersebut, motor akan berputar pada satu arah, dan bila polaritas dari tegangan tersebut dibalik maka arah putaran motor akan terbalik pula.
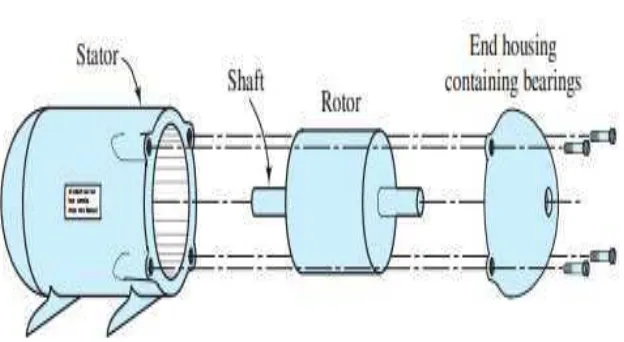
Sebuah motor DC terdiri dari komponen statis atau disebut stator dan komponen yang berputar pada sumbunya yang disebut rotor. Berdasarkan tipe mesinnya, baik stator maupun rotor mengandung konduktor untuk mengalirkan arus listrik yang berbentuk lilitan. Biasanya stator dan rotor
dibuat dari besi untuk meperkuat medan magnet. Skema dari sebuah motor
[image:32.595.149.461.459.630.2]DC ditunjukkan pada Gambar 2.2.
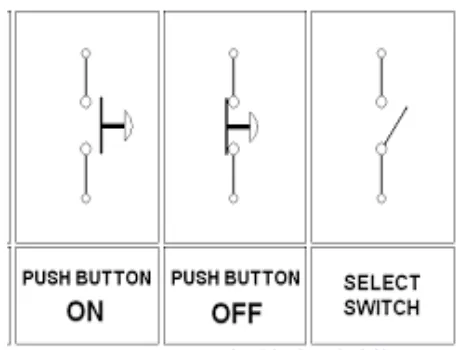
2.6 Tombol pemilihan (push button)
Push button disini digunakan untuk mengatur waktu yang akan
[image:33.595.215.444.262.437.2]digunakan untuk proses pemijatan. Output dari push buttton akan diolah pada microcontroller, sehingga memudahkan proses pemijatan seperti pada Gambar 2.3 menunjukan tombol pemilihan.
Gambar 2.5. Tombol pemilihan
2.7 Liquid crystal display (LCD) 2x16
Menurut Abdul Kadir (2013 : 196), LCD adalah komponen yang dapat menampilkan tulisan. Salah satu jenisnya memiliki dua baris dengan setiap baris terdiri atas enam belas karakter. LCD seperti itu biasa disebut LCD
16x2. Ada dua jenis utama layar LCD yang dapat menampilkan numerik (digunakan dalam jam tangan, kalkulator, dll) dan menampilkan teks
alfanumerik (sering digunakan pada mesin foto copy dan telepon genggam).
Setiap kristal memiliki sambungan listrik individu sehingga dapat dikontrol secara independen. Ketika kristal off' (yakni tidak ada arus yang melalui kristal) cahaya kristal terlihat sama dengan bahan latar belakangnya, sehingga kristal tidak dapat terlihat. Namun ketika arus listrik melewati kristal, itu akan merubah bentuk dan menyerap lebih banyak cahaya.
Hal ini membuat kristal terlihat lebih gelap dari penglihatan mata manusia sehingga bentuk titik atau bar dapat dilihat dari perbedaan latar belakang. Sangat penting untuk menyadari perbedaan antara layar LCD dan layar LED. Sebuah LED display (sering digunakan dalam radio jam) terdiri dari sejumlah LED yang benar-benar mengeluarkan cahaya (dan dapat dilihat dalam gelap). Sebuah layar LCD hanya mencerminkan cahaya, sehingga tidak dapat dilihat dalam gelap. LMB162A adalah modul LCD
matrix dengan konfigurasi 16 karakter dan 2 baris dengan setiap karakternya
dibentuk oleh 8 baris pixel dan 5 kolom pixel (1 baris terakhir adalah kursor). Memori LCD terdiri dari 9.920 bir CGROM, 64 byte CGRAM dan 80x8 bit DDRAM yang diatur pengalamatannya oleh Address Counter dan akses datanya (pembacaan maupun penulisan datanya) dilakukan melalui
register data.
Pada LMB162A terdapat register data dan register perintah. Proses akses data ke atau dari register data akan mengakses ke CGRAM, DDRAM atau CGROM bergantung pada kondisi Address Counter, sedangkan proses akses data ke atau dari register perintah akan mengakses Instruction
Decoder (dekoder instruksi) yang akan menentukan perintah–perintah yang
Tabel 2.5. SpesifikasiPin LCD 2 x 16
No Pin
Nama Pin
I/O Keterangan
1 VSS Power Catu daya, ground (0V) 2 Vdd Power Catu daya positif
3 V0 Power Pengatur kontras. Menurut datasheet, pin ini perlu dihubungkan dengan pin VSS melalui resistor 5Kohm. Namun, dalam praktik, resistor yang digunakan sekitar 2,2Kohm
4 RS Input Registerselect
RS= HIGH: untuk mengirim data RS=LOW: untuk mengirim intruksi 5 R/W Input Read/Writecontrol bus
R/W=HIGH: Mode untuk membaca data di LCD R/W=LOW: Mode penulisan ke LCD
Dihubungkan dengan LOW untuk pengiriman data ke layar 6 E Input Data enable, untuk mengontrol ke LCD. Ketika bernilai
LOW, LCD tidak dapat diakses. 0 = start to lacht data to LCD character I = disable
7 DB0 I/O Data
8 DB1 I/O Data
9 DB2 I/O Data
10 DB3 I/O Data
11 DB4 I/O Data
12 DB5 I/O Data
13 DB6 I/O Data
14 DB7 I/O Data
15 BPL Power Catu daya layar, positif
16 BLK/ GND
Gambar 2.6Skematik LCD 2x16
EN, RS, RW, yaitu untuk jalur EN dinamakan enable. Jalur ini difungsikan untuk memberitahu LCD bahwa anda sedang mengirimkan sebuah data. Untuk mengirimkan data ke LCD, maka melalui program EN harus dibuat logika low “0” dan set pada dua jalur kontrol yang lain RS dan RW. Ketika dua jalur yang lain telah siap, set EN dengan logika “1” dan tunggu untuk sejumlah waktu tertentu ( sesuai dengan datasheet dari LCD tersebut ) dan berikutnya set EN ke logika low “0” lagi. Kemudian untuk jalur RS adalah jalur register select. Ketika RS berlogika low “0”, data akan dianggap sebagai sebuah perintah atau instruksi khusus ( seperti clear screen, posisi kursor, dll ). Ketika RS berlogika high “1”, data yang dikirim adalah data teks yang akan ditampilkan pada display LCD. Sebagai contoh, untuk menampilkan huruf “T” pada layar LCD maka RS harus diset logika high
“1”. Selanjutnya yang terakhir jalur RW adalah jalur kontrol Read/Write.
BAB III
METODE PENELITIAN
3.1 Alat dan Bahan
3.1.1 Alat
1. Toolset 2. Solder 3. Amplas 4. Bor Listrik
5. Cutter
6. Multimeter
3.1.2 Bahan
1. Trafo tipe CT 220VACStep down
2. Dioda bridge 3. Dioda bridge 2
4. Icregulator
5. Capacitor elektrolit 16V 1000uf
6. Transistor npn tipe 2N2222 7. Dioda penyearah tipe 1N4007
8. Relay dc 5v/10a
9. 4 push button n/o
10.Resistor variabel 10k ohm
11. Alphanumeric lcd alphanumeric 16x2
12. Led red led 3mm
13. Resistor led 150r
14. Buzzer 5v dc
15.Trafo 1 A
16.fuse
17.Sistem minimum ATMega8535
18.Kabel pelangi
19.Power on/off
20.Timah
21.Lem,Isolasi Bakar
22.Mur,Baut,Ring
23.Kabel Steker
24.Fleritclorida
3.2 Variabel Penelitian
1 Variabel Bebas
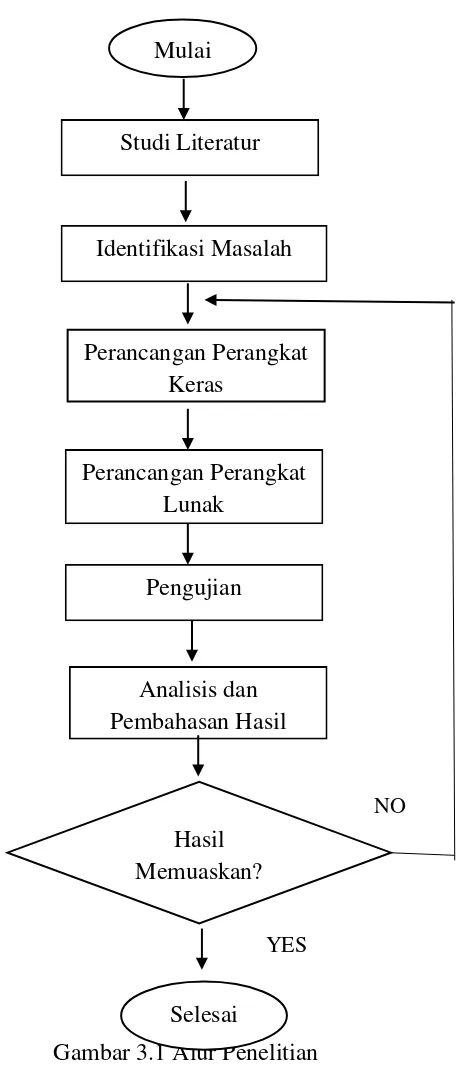
3.3Alur Penelitian
[image:40.595.247.475.173.707.2]Penelitian ini dijalankan dengan tahapan-tahapan yang diperlihatkan oleh Gambar 3.1.
Gambar 3.1 Alur Penelitian Selesai
Pengujian
Analisis dan Pembahasan Hasil Perancangan Perangkat
Lunak
Hasil Memuaskan? Perancangan Perangkat
Keras
Identifikasi Masalah Mulai
Studi Literatur
NO
3.4 Perancangan Perangkat Keras
3.4.1 Diagram Blok Sistem
[image:41.595.147.538.244.561.2]Pembuatan Diagram Blok dirancang sedemikian rupa sehingga alat dapat bekerja dengan baik dan dirancang sesuai dengan mekanik yang digunakan seperti pada Gambar 3.2.
Gambar 3.2Diagram Blok Sistem
Pada mulanya tegangan dari jala-jala PLN masuk kedalam trafo 1
Ampere dengan output 12V AC yang masuk ke dalam rangkaian power
supply sehingga merubah tegangan bolak-balik (AC) menjadi tegangan
(DC). Dari tegangan (DC) yang dihasilkan dari rangkaian power supply
Setting Waktu Driver
Motor DC
Power Supply
ATMega8535
Reset SettingSpeed
Mekanik Pemijat
tersebut akan memberikan tegangan pada seluruh rangkaian yang ada. Untuk output power supply terdiri dari tegangan 5V DC yang digunakan untuk memberikan tegangan pada microcontroller, sedangkan untuk tegangan 200V DC digunakan untuk memberikan tegangan pada motor
Langkah pertama yang dilakukan untuk menjalankan modul ini adalah dengan menekan swicth ON. Kemudian setting Speed dengan 3 pemilihan kecepatan yaitu Low, Medium, High. Berikutnya setting timer dengan memilih diantara 3 waktu yang telah disediakan yaitu 5 menit, 10 menit, 15 menit. Maka proses pada microcontroller akan berlangsung yang ditandai lampu indikator menyala dengan aktifnya driver yang membuat motor
bekerja dan proses pemijatan berlangsung. Apabila dalam pemilihan waktu di awal terjadi kesalahan maka dapat dikembalikan dalam posisi awal dengan menekan tombol RESET. Selanjutnya apabila dalam pemilihan waktu terapi sudah selesai maka secara otomatis motor berhenti ditandai dengan buzzer menyala dan lampu indikator pun mati. Untuk mengakhiri modul ini yaitu dengan menekan switch OFF.
3.4.2 Rancang Bangun Modul
Gambar 3.3 Rancang Bangun Modul
Keterangan
LED 1 : Lampu indikator timer 5 menit
LED 2 : Lampu indikator timer 10 menit
LED 3 : Lampu indikator timer 15 menit
Kontras : Ketajaman LCD
Buzzer : Sebagai alarm
Timer 1 : Proses terapi selama 5 menit
Timer 2 : Proses terapi selama 10 menit
Timer 3 : Proses terapi selama 15 menit
Setting Speed : Setting kecepatan terdiri dari, Low, Medium, High
Reset : Membersihkan program
TIMER 1
KONTRAS TIMER 2 TIMER 3
RESET LCD
LED 3 LED1
BUZZE
SETTING SPEED
3.4.3 Pembuatan Casing box
1. Bahan :
1) 1 box kosong (ukuran menyesuaikan kebutuhan) 2) Lem tembak
3) Lem Plastik stile
4) Cat pilox warna hitam
5) Stiker
2. Alat :
1) Cutter
2) Penggaris besi
3) Solder listrik/obeng yang dipanaskan 4) Bor listrik
5) Amplas halus
3. Langkah pembuatan.
1) Menggambar pola pada box sesuai desain yang diinginkan. 2) Menyesuaikan pola dengan komponen-komponen yang
dipasang.
4) Merapikan bekas potongan dengan menggunakan cutter
tajam dan juga amplas.
5) Melubangi untuk tempat pemasangan baut dengan bor (sesuikan dengan baut yang akan dipasang). Setelah pola terpotong semua amplas box dengan merata.
6) Memberi cat menggunakan pilox (pertama lapisan tipis sebagai dasar, tunggu sampai setengah kering kemudian semprot lagi dengan merata dan rapikan agar hasil dapat maksimal).
7) Setelah box kering dari cat, rakit komponen sesuai pola (seperti: LCD, tombol push bottom, tombol on/off, dll).
[image:45.595.218.505.486.688.2]8) Merekatkan dengan lem plastik stile, tunggu hingga benar-benar kering seperti pada Gambar 3.4 tersebut.
3.4.4 Perakitan Rangkaian Power Supply
[image:46.595.174.546.251.430.2]Rangkaian sistematika rangkaian Power Supply pada moduldengan mengunakan aplikasi pada laptop, aplikasi yang digunakan pada pembuatan modul ini adalah proteus. Untuk gambar sistematika pada aplikasi dapat dilihat pada Gambar 3.5.
Gambar.3.5 Sistematika Modul Rangkaian Power Supply
Setelah sistematika rangkaian jadi, tahap selanjutnya membuat
lay out nya pada aplikasi eangle cadsoft. Untuk gambar layout Power
Supply pada papan PCB dapat dilihat pada Gambar 3.6.
Gambar 3.6 Layout PCB Power Supply
OUT 230 VDC 230 VDC
[image:46.595.205.480.576.697.2]3.4.5 Perakitan Rangkaian LED
Rangkain sistematika rangkaian LED dengan mengunakan aplikasi pada laptop, aplikasi yang digunakan pada pembuatan modul ini adalah proteus. Untuk gambar sistematika rangkaian pada aplikasi dapat dilihat pada Gambar 3.9.
[image:47.595.177.477.244.401.2]
Gambar 3.9 Sistematika Modul Rangkaian LED
Setelah sistematika rangkaian jadi, tahap selanjutnya membuat
lay out nya aplikasi eangle cadsoft dan. Untuk gambar layout LED
pada papan PCB dapat dilihat pada Gambar 3.10.
[image:47.595.184.499.541.687.2]3.5 Perancangan Perangkat Lunak
3.5.1 Diagram Alir Program
[image:48.595.133.535.173.716.2]Pembuatan diagram alir program dapat dilihat pada Gambar 3.11.
Pada saat saklar utama ON maka microcontroller akan melakukan scanning terhadap tombol input apa yang ditekan, dapat dilihat pada Gambar 3.11. Apabila tombol 5 menit ditekan maka akan terhubung ke portd, Jika tidak maka akan melakukan instruksi dibawahnya yaitu melakukan scanning terhadap tombol 10 menit yang terhubung ke portd.1, dan apabila tidak ditekan maka akan diteruskan lagi. Jika tombol 15 menit ditekan maka tidak akan melakukan scanning lagi terhadap instruksi yang dibawahnya yakni tombol reset, dan begitu terus untuk siklus berikutnya. Namun apabila ada salah satu tombol yang ditekan, yaitu tombol 5 menit, maka jalannya program selanjutnya adalah menyamping yakni akan membuat timer on, relay motoron, dan 1 buah led indicator 5 menit
on, dilanjutkan lagi dengan batasan set timer selama 5 menit yaitu apabila tombol telah ditekan dan timer sudah berjalan dan menunjukkan limit 5 menit, maka akan melakukan instruksi/ output
berupa timer=off, relay motor=off, dan 1 buah led indicator 5 menit akan off, disusul dengan indikasi bunyi dari buzzer sebagai tanda bahwa timer 5 menit telah mencapai limit. Begitu pula untuk instruksi tombol 10 menit dan 15 menit, yang membedakan diantara ketiganya hanya nyala led nya saja (kalau 10 menit 2 buah led yang on, sedangkan untuk 15 menit 3 buah led yang on). Untuk instruksi tombol reset dapat dilihat pada Gambar 3.11 , apabila tombol reset
ditekan berarti portd.3=0 dan akan mematikan seluruh led, relay
Sedangkan apabila seluruh tombol (tombol 5 menit, tombol 10 menit, tombol 15 menit, dan tombol reset tidak ada yang ditekan) maka alur program selanjutnya adalah kembali lagi ke menu mulai (kembali
scanning tombol).
3.5.2 Listing Program Timer
Dalam pembuatan program penulis menggunakan bahasa C, berikut adalah isi program yang di buat untuk mengisi microcontroler
menggunakan Code Vision AVR seperti pada Gambar 3.12.
Gambar 3.12 Listing Program Timer
Berdasarkan program diatas adalah untuk mengkalkulasi nilai
timer apabila telah mencapai 60 detik maka nilai menit haruslah naik
interrupt [TIM1_OVF] void timer1_ovf_isr(void) {
TCNT1H=0xC2F6 >> 8; TCNT1L=0xC2F6 & 0xff; detik++;
} void start()
{
TIMSK=0x04;
}
void hitung_detik() {
if(detik>=60&&PORTA.0==1&&PORTB.1==0&&PORTB.2==1&&PORTB.3==1) {
lcd_clear(); lcd_gotoxy(0,0);
lcd_puts(" Set 5 Menit "); menit++;
detik=0; }
if(detik>=60&&PORTA.0==1&&PORTB.1==0&&PORTB.2==0&&PORTB.3==1) {
lcd_clear(); lcd_gotoxy(0,0);
lcd_puts(" Set 10 Menit "); menit++;
detik=0; }
if(detik>=60&&PORTA.0==1&&PORTB.1==0&&PORTB.2==0&&PORTB.3==0) {
lcd_clear(); lcd_gotoxy(0,0);
lcd_puts(" Set 15 Menit "); menit++;
[image:50.595.171.523.294.700.2]1 tingkat setiap kelipatan 60, karena 1 menit=60 detik dan menampilkan tulisan pada LCD “setting timer 5 menit, setting timer
10 menit, dan setting timer 15 menit” berdasarkan kondisi dari LED
dan Relay.
3.5.3 Jenis Penelitian
Jenis penelitian yang dipakai untuk melakukan penelitian ini adalah post test only. Pada rancangan ini, peneliti hanya melihat hasil tanpa mengukur keadaan sebelumnya. Dalam penelitian terdapat kelompok kontrol. Pengukuran modul dilakukan sebanyak 30 kali dalam percobaan dan dicari nilai standar deviasi (STDV), simpangan,
error, dan rata-rata dengan rumus sebagai berikut.
X O
Non Random ---
( - ) O
dengan ,
X= Treatmen/perlakuan yg diberikan ( variabel
Independen)
0= Observasi (variabel dependen)
1. Rata – rata
Rata – rata adalah nilai atau hasil pembagian dari jumlah data yang diambil atau diukur dengan banyaknya pengambilan data atau banyaknya pengukuran.
X
4. Standart Deviasi
Rumus standart deviasi (SD) adalah:
(
)
( )
1
1
2
−
−
=
∑
=n
X
X
SD
n i
i
(3-4)
dengan ,
SD = standart Deviasi
= nilai yang dikehendaki
BAB IV
PENELITIAN DAN PEMBAHASAN
4.1 Prosedur Pemakaian
1. Menekan tombol Switch ON, maka LCD akan menyala dengan kalimat pembuka setting timer.
2. Melakukan setting timer yang terdiri dari 3 pemilihan lama waktu yaitu, 5 menit, 10 menit, dan 15 menit.
3. Melakukan setting speed dengan 3 pemilihan kecepatan yaitu, low,
medium, dan high.
4. Apabila layar LCD kurang jelas kecerahannya maka lakukan setting
kontras.
5. Selanjutnya mekanik pemijat aktif dengan ditandainya lampu indikator menyala.
6. Memulai proses terapi pemijatan dengan batas maksimal waktu selama 15 menit.
7. Apabila proses pemijatan telah selesai maka ditandai dengan buzzer
aktif sebagai alarm bahwa proses terapi telah berakhir.
8. Menekan tombol swicth off, untuk mengakhiri proses pemijatan. 9. Selesai
4.2 Perawatan Modul
1. Merapikan kembali semua kabel ke posisi semula, apabila modul telah selesai digunakan.
2. Membersihkan bagian-bagian utama menggunakan kain lembut dan tidak boleh menggunakan tiner,bensin atau cairan pembersih lainnya. 3. Menyimpan modul dengan posisi yang benar, serta mekanik pemijat
tidak boleh diletakan secara terbalik.
4. Menyimpan modul jauh dari jangkauan anak-anak, serta jauh dari kelembapan, temperatur yang tinggi, sinar matahari langsung dan percikan air.
4.3 Kelebihan dan Kekurangan
4.3.1 Kelebihan
1. Proses terapi menggunakan modul ini jauh lebih efektif proses penyembuhannya.
2. Pada proses terapi menggunakan modul ini jauh lebih efisien waktu penyembuhannya dibandingkan dengan terapi antiinflamasi, fisioterapi, dan olahraga low impact (berenang).
3. Dilengkapi dengan LCD, sehingga fungsi-fungsi intensitas waktu terapi dapat dengan jelas ditampilkan baik.
4.3.2 Kekurangan
1. Pada tampilan layar LCD hanya ditampilkan setting timer. 2. Pada mekanik pemijat terlalu berat, sehingga memberatkan user
dalam proses terapi.
3. Design pada casing modul kurang elegan atau kurang rapi.
4.4 Pengujian dan Hasil Pengujian Timer
[image:56.595.141.382.354.747.2]Hasil data pengukuran modul timer 5 menit dengan stopwatch ditunjukan pada Tabel 4.1 sebagai berikut.
Tabel 4.1 Hasil pengukuran modul timer 5 menit Percobaan Stopwatch Modul 5 menit
1 300 300
2 300 302
3 300 300
4 300 300
5 300 301
6 300 301
7 300 300
8 300 300
9 300 300
10 300 300
11 300 301
12 300 300
13 300 300
14 300 300
15 300 300
16 300 301
17 300 300
18 300 300
19 300 301
20 300 300
21 300 300
22 300 300
23 300 300
24 300 301
Berdasarkan Tabel 4,1 merupakan hasil dari pengukuran stopwatch
terhadap timer 5 menit. Pada stopwatch dan Modul memiliki nilai simpangan 0,3333 detik.
Hasil data pengukuran modul timer 10 menit dengan stopwatch
[image:57.595.141.384.98.244.2]ditunjukan pada Tabel 4.2 sebagai berikut.
Tabel 4.2 hasil data pengukuran modul terhadap timer 10 menit Percobaan Stopwatch Modul 5 menit
26 300 300
27 300 300
28 300 301
29 300 300
30 300 301
Rata-rata 300,3333detik Simpangan 0,3333 detik
SD 0,5466 detik
Percobaan Stopwatch Modul 10 menit
1 600 600
2 600 600
3 600 600
4 600 602
5 600 600
6 600 600
7 600 600
8 600 600
9 600 601
10 600 600
11 600 600
12 600 601
13 600 601
14 600 600
15 600 600
16 600 600
Berdasarkan Tabel 4.2 merupakan hasil dari pengukuran stopwatch terhadap
timer 10 menit. Pada stopwacth dan Modul memiliki nilai standar devisiasi
0,5959 detik.
[image:58.595.137.372.96.368.2]Data hasil pengukuran modul timer 15 menit dengan stopwatch ditunjukan pada Tabel 4.3 sebagai berikut.
Tabel 4.3 Hasil pengukuran modul 15 menit Percobaan Stopwatch Modul 10 menit
18 600 602
19 600 600
20 600 600
21 600 601
22 600 600
23 600 600
24 600 600
25 600 600
26 600 600
27 600 600
28 600 600
29 600 600
30 600 601
Rata-rata 600,3 detik Simpangan 0,3 detik
SD 0,5959 detik
Percobaan Stopwatch Modul 15 menit
1 900 900
2 900 900
3 900 900
4 900 900
5 900 900
6 900 900
7 900 900
8 900 900
9 900 900
Berdasarkan Tabel 4.3 merupakan hasil dari pengukuran stopwacth terhadap
timer 15 menit. Pada stopwatch dan Modul memiliki selisih 2 detik pada
percobaan ke 18 nilai simpangan 0,133 detik . Percobaan Stopwatch Modul 15 menit
11 900 900
12 900 900
13 900 900
14 900 900
15 900 901
16 900 900
17 900 900
18 900 902
19 900 900
20 900 900
21 900 900
22 900 900
23 900 901
24 900 900
25 900 900
26 900 900
27 900 900
28 900 900
29 900 900
30 900 900
Rata-rata 900,133 detik Simpangan 0,133 detik
4.5 Hasil Perhitungan Rata-rata Timer
Hasil dari pengukuran terhadap stopwatch dihitung kembali untuk dianalisis. Analisis data menggunakan rumus yang sudah ditentukan, yaitu
X/rata-rata, simpangan, error (%), standar devisiasi. Berikut merupakan
[image:60.595.145.520.262.346.2]hasil dari perhitungan yang ditunjukan oleh Tabel 4.4. Tabel 4.4 Data pengukuran rata-rata keseluruhan timer
Dari hasil data Tabel 4.4, didapatkan sebagai berikut:
1. Persentase error terbesar terdapat pada timer 5 menit, yaitu mencapai 0,11%
2. Persentase error terkecil terdapat pada tekanan timer 15menit dengan presentase yaitu sebesar 0,01%
4.6 Data Pengukuran Tegangan pada modul
Hasilpengukuran data pada saat motor dalam posisi low, nedium, dan
high ditunjukan oleh Tabel 4.5.
Tabel 4.5 hasil pengukuran tegangan posisi motorlow, medium, high.
PERCOBAAN LOW MEDIUM HIGH
1 163 179 200
2 163 184 200
3 162 180 200
4 163 181 200
5 165 180 200
6 162 180 200
7 162 182
PERCOBAAN RATA-RATA SIMPANGAN ERROR SD
5 MENIT 300,3333 detik 0,3333 detik 0,11% 0,5466
10 MENIT 600,3 detik 0,3 detik 0,05% 0,5959
15 MENIT 900,133 detik 0,133 detik 0,01% 0,4341
[image:60.595.139.458.601.750.2]PERCOBAAN LOW MEDIUM HIGH
8 162 184 200
9 161 183 200
10 162 184 200
11 161 184 200
12 162 183 200
13 162 183 200
14 161 182 200
15 162 184 200
16 162 183 200
17 163 183 200
18 161 182 200
19 162 181 200
20 162 183 200
21 161 182 200
22 162 183 200
23 162 183 200
24 161 182 200
25 162 182 200
26 161 183 200
27 161 182 200
28 162 182 200
29 161 182 200
30 162 183 200
RATA-RATA 162,15 Volt 182,25 Volt 200 Volt SIMPANGAN 132,15 Volt 152,25 Volt 0
SD 0,868345 Volt 1,316998 Volt 0
Berdasarkan Tabel 4.5 merupakan hasil dari pengukuran tegangan saat posisi motorlow, medium, dan high. Pada saat motorlow diperoleh standar
devisiasi 0,868345, medium sebesar 1,316998, dan high sebesar 0. Pada
motor high, simpangan dan standar deviasi sebesar 0 karena pada posisi ini
Tabel 4.6 hasil pengukuran tegangan keseluruhan modul
4.7 Analisis data
Pada rangkaian power supply dibutuhkan tegangan 150-220 Volt DC
untuk menjalankan motor, untuk menghambat tegangan pada saat motor dalam posisi low dibutuhkan resistor sebesar 1k Ω, pada saat motor dalam
posisi medium dibutuhkan resistor sebesar 405Ω, dan pada saat motor
dalam posisi high tidak dibutuhkan resistor. Sedangkan pada motornya
sendiri terdapat hambatan sebesar 2k Ω.
4.7.1 Saat motor low
Pada saat motor dalam posisi low di dapat V (Volt) rata-rata sebesar, 162,15 Volt. Maka perhitungan mencari I (Ampere) sebagai berikut:
Diketahui : V = 162,15 Volt
R = 1K Ω
I pengukuran = 60 mA Maka : I = V/Rtot
= 162,15/(1K+2K) = 162,15/3000 = 0,05405 A
TEGANGAN
RATA-RATA SIMPANGAN SD
MODUL LOW 162,15
132,15 0,86834
MODUL MEDIUM
182,25 152,25 1,317
MODUL HIGH
= 54,05 mA
Berdasarkan dari percobaan pada saat motor berada dalam posisi low
di dapat, I pengukuran = 60 mA dan I perhitungan = 54,05 mA. Hasil I pengukuran berbeda dengan I perhitungan, Hal ini dikarenakan arus pada modul tersebut dipengaruhi oleh resistansi maka arus yg dihasilkan semakin kecil.
4.7.2 Saat motor medium
Pada saat motor dalam posisi medium di dapat V (Volt) sebesar, 182,25 volt. Maka perhitungan mencari I (Ampere) sebagai berikut : Diketahui : V = 179 Volt
R = 405 Ω I pengukuran = 80 mA Maka : I = V/R
= 182,25/(405+2K) = 182,25/2405 = 0,076 A = 76 mA
Berdasarkan dari percobaan pada saat motor berada dalam posisi
medium di dapat, I pengukuran = 80 mA dan I perhitungan = 76 mA.
4.7.3 Saat motor high
Pada saat motor dalam posisi High di dapat V (Volt ) sebesar, 200 Volt. Maka perhitungan mencari I (Ampere) sebagai berikut : Diketahui : V = 200 Volt
R =2K Ω I pengukuran = 100 mA
Maka : I = V/Rtot
= 200/(2K)
= 200/2000
= 0,1 A
= 100 mA
Berdasarkan dari percobaan pada saat motor berada dalam posisi High
di dapat, I pengukuran = 100mA maka I perhitungan = 100 mA, Arus tersebut sama karena tidak dipengaruhi oleh resistansi maka arus yg dihasilkan tetap.
4.8 Akurasi Data
4.8.1 Akurasi data pada pengukuran timer
Diketahui : Rata-rata error = 0,06 % Maka = 100% - Rata-rata error
Berdasarkan perhitungan akurasi pada pengukuran timer didapat data sebesar 99,94 %, sehingga dapat disimpulkan bahwa pengukuran timer pada modul ini cukup akurat.
4.8.2 Akurasi data pada pengukuran tegangan motor
Diketahui : Rata-rata error = 3,09 % Maka = 100% - Rata-rata error
= 100% - 3,09% = 96,91%
BAB V
PENUTUP
5.1 KESIMPULAN
Setelah melakukan proses pembuatan, percobaan, pengujian alat dan pendataan, penulis dapat menyimpulkan sebagai berikut :
1. Pembuatan modul ini digunakan pada penderita penyakit lower back
pain yang menggunakan motor DC dengan pengendali sistem
microcontroller ATMega8535.
2. Akurasi hasil pengukuran timer yang dilakukan adalah sebesar 99,94%, sehingga berdasarkan data tersebut dapat disimpulkan bahwa pengukuran timer pada modul ini cukup akurat.
3. Akurasi hasil pengukuran tegangan motor yang dilakukan didapat akurasi sebesar 96,91%.
5.2 Saran
Setelah melakukan proses pembuatan, percobaan, pengujian alat dan pendataan, penulis memberikan saran sebagai pengembangan peneliti selanjutnya sebagai berikut:
1. Dalam setiap melakukan pekerjaan agar lebih memperhatikan keselamatan terutama saat pembutan modul.
2. Pembuatan casing dapat diperbaiki lagi dan diperindah dengan pola yang lebih elegant.
3. Penampilan pada layar LCD saat motor berputar pada posisi Low,
Medium, High.
DAFTAR PUSTAKA
Bishop, Owen. 2004. Electronics a first course. Jakarta: Erlangga
Fridayanti, Octaviani. 2006. Health Massage Therapy. Tugas Akhir. Poltekes Kemenkes Surabaya
Ikasari, Yunita. 2006. Therapeutic Apparatus. Tugas Akhir . Poltekes Kemenkes Surabaya
Miti.2013. Master Micro. Yogyakarta: Inkubator Teknologi
Rangkuti, Syahban. 2011. Microcontroller Atmel AVR. Bandung: Informatika Sahala, Aldo. 2014. 45 Penyakit dan Gangguan Syaraf. Yogyakarta: Rapha Publishing.
Wallace.1986. Mechanical Evaluation and Treatment. Edinburgh: Churchill Livingstone
Waluyo,Joko. 2012. Pengantar Mesin-mesin Listrik. Yogyakarta: Akprind Fahmi, Zaleeits. 2014. Motor DC.
https://fahmizaleeits.wordpress.com. . Motor DC. 2014 (Di unduh pada tanggal
25 Agustus 2015)
Wordpress, 2009. Low Back Pain (LBP).
1. Nama : Therapy Massage
2. Jenis : Pijat Terapi
3. Display : LCD Karakter 16x2
4. Daya : 150-220 VoltDC
unsigned char detik,menit=0,temp[16];
#include <mega8535.h>
#include <alcd.h>
#include <delay.h>
#include <stdio.h>
interrupt [TIM1_OVF] void timer1_ovf_isr(void) {
TCNT1H=0xC2F6 >> 8; TCNT1L=0xC2F6 & 0xff; detik++; } void start() { TIMSK=0x04; } void hitung_detik() { if(detik>=60&&PORTA.0==1&&PORTB.1==0&&PORTB.2==1&&PORTB.3==1) { lcd_clear(); lcd_gotoxy(0,0);
lcd_puts(" Set 5 Menit "); menit++; detik=0; } if(detik>=60&&PORTA.0==1&&PORTB.1==0&&PORTB.2==0&&PORTB.3==1) { lcd_clear(); lcd_gotoxy(0,0);
lcd_puts(" Set 10 Menit "); menit++; detik=0; } if(detik>=60&&PORTA.0==1&&PORTB.1==0&&PORTB.2==0&&PORTB.3==0) { lcd_clear(); lcd_gotoxy(0,0);
lcd_puts(" Set 15 Menit "); menit++; detik=0; } } void reset_tombol() { if(PIND.3==0) { lcd_clear();
lcd_puts(" RESET TIMER "); delay_ms(700);
lcd_clear(); lcd_gotoxy(0,0);
} void reset_otomatis() { lcd_clear(); lcd_gotoxy(0,0); lcd_puts("Therapy Massage"); PORTA.0=0;PORTB.1=1;PORTB.2=1;PORTB.3=1; TIMSK=0x00; detik=0; menit=0; delay_ms(100); } void menit_5() { if(PIND.0==0) { reset_otomatis(); lcd_clear();
lcd_puts(" Set 5 Menit "); start(); PORTA.0=1;PORTB.1=0;PORTB.2=1;PORTB.3=1; } } void menit_10() { if(PIND.1==0) { reset_otomatis(); lcd_clear();
lcd_puts(" Set 10 Menit "); start(); PORTA.0=1;PORTB.1=0;PORTB.2=0;PORTB.3=1; } } void menit_15() { if(PIND.2==0) { reset_otomatis(); lcd_clear();
lcd_puts(" Set 15 Menit ");; start(); PORTA.0=1;PORTB.1=0;PORTB.2=0;PORTB.3=0; } } void time_up() { lcd_clear(); lcd_gotoxy(0,0);
lcd_puts(" Set Time Lagi ");
if(menit==10&&PORTB.1==0&&PORTB.2==0&&PORTB.3==1) { time_up(); }; if(menit==5&&PORTB.1==0&&PORTB.2==1&&PORTB.3==1) { time_up(); } } void tombol() { if(PIND.0==0&&PIND.1==1&&PIND.2==1) { menit_5(); }
else if (PIND.0==1&&PIND.1==0&&PIND.2==1) {
menit_10(); }
else if (PIND.0==1&&PIND.0==1&&PIND.2==0) { menit_15(); } } void tampil_lcd() { lcd_gotoxy(3,1); sprintf(temp,"Time= %d:%d",menit,detik); lcd_puts(temp); } void main(void) { PORTA=0x00; DDRA.1=0xFF; PORTB.0=0; PORTB.1=1; PORTB.2=1; PORTB.3=1; DDRB=0xFF; PORTC=0x00; DDRC=0x00; PORTD=0xFF; DDRD=0x00; TCCR1B=0x05; TCNT1H=0xC2; TCNT1L=0xF8; ACSR=0x80; SFIOR=0x00; lcd_init(16); lcd_gotoxy(0,0); lcd_putsf("Therapy Massage");
#asm("sei")
while (1) {
menit_15(); kondisi(); };
– Fully Static Operation
– Up to 16 MIPS Throughput at 16 MHz – On-chip 2-cycle Multiplier
• Nonvolatile Program and Data Memories
– 8K Bytes of In-System Self-Programmable Flash Endurance: 10,000 Write/Erase Cycles
– Optional Boot Code Section with Independent Lock Bits In-System Programming by On-chip Boot Program True Read-While-Write Operation
– 512 Bytes EEPROM
Endurance: 100,000 Write/Erase Cycles – 512 Bytes Internal SRAM
– Programming Lock for Software Security
• Peripheral Features
– Two 8-bit Timer/Counters with Separate Prescalers and Compare Modes
– One 16-bit Timer/Counter with Separate Prescaler, Compare Mode, and Capture Mode
– Real Time Counter with Separate Oscillator – Four PWM Channels
– 8-channel, 10-bit ADC 8 Single-ended Channels
7 Differential Channels for TQFP Package Only
2 Differential Channels with Programmable Gain at 1x, 10x, or 200x for TQFP Package Only
– Byte-oriented Two-wire Serial Interface – Programmable Serial USART
– Master/Slave SPI Serial Interface
– Programmable Watchdog Timer with Separate On-chip Oscillator – On-chip Analog Comparator
• Special Microcontroller Features
– Power-on Reset and Programmable Brown-out Detection – Internal Calibrated RC Oscillator
– External and Internal Interrupt Sources
– Six Sleep Modes: Idle, ADC Noise Reduction, Power-save, Power-down, Standby and Extended Standby
• I/O and Packages
– 32 Programmable I/O Lines
– 40-pin PDIP, 44-lead TQFP, 44-lead PLCC, and 44-pad QFN/MLF
• Operating Voltages
– 2.7 - 5.5V for ATmega8535L – 4.5 - 5.5V for ATmega8535
• Speed Grades
– 0 - 8 MHz for ATmega8535L – 0 - 16 MHz for ATmega8535
8-bit
Microcontroller
with 8K Bytes
In-System
Programmable
Flash
ATmega8535
ATmega8535L
Summary
2502KS–AVR–10/062
ATmega8535(L)
2502KS–AVR–10/06
Disclaimer Typical values contained in this data sheet are based on simulations and
characteriza-tion of other AVR microcontrollers manufactured on the same process technology. Min and Max values will be available after the device is characterized.
(SS) PB4 (MOSI) PB5 (MISO) PB6 (SCK) PB7 RESET VCC GND XTAL2 XTAL1 (RXD) PD0 (TXD) PD1 (INT0) PD2 (INT1) PD3 (OC1B) PD4 (OC1A) PD5 (ICP1) PD6
PA4 (ADC4) PA5 (ADC5) PA6 (ADC6) PA7 (ADC7) AREF GND AVCC PC7 (TOSC2) PC6 (TOSC1) PC5 PC4 PC3 PC2 PC1 (SDA) PC0 (SCL) PD7 (OC2)
1 2 3 4 5 6 7 8 9 10 11 33 32 31 30 29 28 27 26 25 24 23
(MOSI) PB5 (MISO) PB6 (SCK) PB7 RESET VCC GND XTAL2 XTAL1 (RXD) PD0 (TXD) PD1 (INT0) PD2
PA4 (ADC4) PA5 (ADC5) PA6 (ADC6) PA7 (ADC7) AREF GND AVCC PC7 (TOSC2) PC6 (TOSC1) PC5 PC4
44 43 42 41 40 39 38 37 36 35 34
12 13 14 15 16 17 18 19 20 21 22
(INT1) PD3 (OC1B) PD4 (OC1A) PD5 (ICP1) PD6 (OC2) PD7 VCC GND
(SCL) PC0 (SDA) PC1 PC2 PC3 PB4 (SS) PB3 (AIN1/OC0) PB2 (AIN0/INT2) PB1 (T1) PB0 (XCK/T0) GND VCC PA0 (ADC0) PA1 (ADC1) PA2 (ADC2) PA3 (ADC3)
7 8 9 10 11 12 13 14 15 16 17 39 38 37 36 35 34 33 32 31 30 29
(MOSI) PB5 (MISO) PB6 (SCK) PB7 RESET VCC GND XTAL2 XTAL1 (RXD) PD0 (TXD) PD1 (INT0) PD2
PA4 (ADC4) PA5 (ADC5) PA6 (ADC6) PA7 (ADC7) AREF GND AVCC PC7 (TOSC2) PC6 (TOSC1) PC5 PC4
6 5 4 3 2 1 44 43 42 41 40
18 19 20 21 22 23 24 25 26 27 28
(INT1) PD3 (OC1B) PD4 (OC1A) PD5 (ICP1) PD6 (OC2) PD7 VCC GND
(SCL) PC0 (SDA) PC1 PC2 PC3 PB4 (SS) PB3 (AIN1/OC0) PB2 (AIN0/INT2) PB1 (T1) PB0 (XCK/T0) GND VCC PA0 (ADC0) PA1 (ADC1) PA2 (ADC2) PA3 (ADC3)
PLCC
[image:75.612.199.563.85.444.2]3
2502KS–AVR–10/06
enhanced RISC architecture. By executing instructions in a single clock cycle, the ATmega8535 achieves throughputs approaching 1 MIPS per MHz allowing the system designer to optimize power consumption versus processing speed.
Block Diagram Figure 2. Block Diagram
INTERNAL OSCILLATOR OSCILLATOR WATCHDOG TIMER MCU CTRL. & TIMING OSCILLATOR TIMERS/ COUNTERS INTERRUPT UNIT STACK POINTER EEPROM SRAM STATUS REGISTER USART PROGRAM COUNTER PROGRAM FLASH INSTRUCTION REGISTER INSTRUCTION DECODER PROGRAMMING LOGIC SPI ADC INTERFACE COMP. INTERFACE PORTA DRIVERS/BUFFERS
PORTA DIGITAL INTERFACE
GENERAL PURPOSE REGISTERS X Y Z ALU + -PORTC DRIVERS/BUFFERS
PORTC DIGITAL INTERFACE
PORTB DIGITAL INTERFACE
PORTB DRIVERS/BUFFERS
PORTD DIGITAL INTERFACE
PORTD DRIVERS/BUFFERS XTAL1 XTAL2 RESET CONTROL LINES VCC GND MUX & ADC AREF
PA0 - PA7 PC0 - PC7
PD0 - PD7 PB0 - PB7
[image:76.612.201.565.150.718.2]4
ATmega8535(L)
2502KS–AVR–10/06 The ATmega8535 provides the following features: 8K bytes of In-System Programmable Flash with Read-While-Write capabilities, 512 bytes EEPROM, 512 bytes SRAM, 32 general purpose I/O lines, 32 general purpose working registers, three flexible Timer/Counters with compare modes, internal and external interrupts, a serial program-mable USART, a byte oriented Two-wire Serial Interface, an 8-channel, 10-bit ADC with optional differential input stage with programmable gain in TQFP package, a program-mable Watchdog Timer with Internal Oscillator, an SPI serial port, and six software selectable power saving modes. The Idle mode stops the CPU while allowing the SRAM, Timer/Counters, SPI port, and interrupt system to continue functioning. The Power-down mode saves the register contents but freezes the Oscillator, disabling all other chip functions until the next interrupt or Hardware Reset. In Power-save mode, the asynchronous timer continues to run, allowing the user to maintain a timer base while the rest of the device is sleeping. The ADC Noise Reduction mode stops the CPU and all I/O modules except asynchronous timer and ADC, to minimize switching noise during ADC conversions. In Standby mode, the crystal/resonator Oscillator is running while the rest of the device is sleeping. This allows very fast start-up combined with low-power consumption. In Extended Standby mode, both the main Oscillator and the asynchro-nous timer continue to run.
The device is manufactured using Atmel’s high density nonvolatile memory technology. The On-chip ISP Flash allows the program memory to be reprogrammed In-System through an SPI serial interface, by a conventional nonvolatile memory programmer, or by an On-chip Boot program running on the AVR core. The boot program can use any interface to download the application program in the Application Flash memory. Soft-ware in the Boot Flash section will continue to run while the Application Flash section is updated, providing true Read-While-Write operation. By combining an 8-bit RISC CPU with In-System Self-Programmable Flash on a monolithic chip, the Atmel ATmega8535 is a powerful microcontroller that provides a hi