PERANCANGAN PROTOTYPE KONVEYOR MULTI LEVEL SEBAGAI ALAT PEMINDAHAN BARANG BERBASIS ATMEGA 8535
SKRIPSI Diajukan Oleh:
NIM : 070821012 RYANDA AULIA RAJADIN
DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATERA UTARA
PERANCANGAN PROTOTYPE KONVEYOR MULTI LEVEL SEBAGAI ALAT PEMINDAHAN BARANG BERBASIS ATMEGA 8535
SKRIPSI
Diajukan untuk melengkapi tugas dan memenuhi syarat mencapai gelar sarjana sains
NIM : 070821012 RYANDA AULIA RAJADIN
DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATERA UTARA
PERSETUJUAN
Judul : PERANCANGAN PROTOTYPE KONVEYOR MULTI LEVEL SEBAGAI ALAT PEMINDAHAN BARANG BERBASIS ATMEGA 8535
Kategori : SKRIPSI
Nama : RYANDA AULIA RAJADIN
NIM : 070821012
Program Studi : SARJANA (S1) FISIKA Departemen : FISIKA
Fakultas : MATEMATIKA DAN ILMU PENGETAHUAN ALAM (FMIPA) UNIVERSITAS SUMATERA UTARA
Diluluskan di, Medan, 15 Juni 2010
Diketahui/Disetujui oleh
Departemen Fisika FMIPA USU Pembimbing
Ketua
Dr. Marhaposan Situmorang Drs. Kurnia Brahmana, M.Si
PERNYATAAN
PERANCANGAN PROTOTYPE KONVEYOR MULTI LEVEL SEBAGAI ALAT PEMINDAHAN BARANG BERBASIS ATMEGA 8535
SKRIPSI
Saya mengakui bahwa skripsi ini adalah hasil kerja saya sendiri, kecuali beberapa kutipan dan ringkasan yang masing-masing disebutkan sumbernya.
Medan, 2010
PENGHARGAAN
Syukur Alhamdulillah penulis panjatkan kehadirat Allah SWT yang telah memberikan rahmat dan karunia-Nya sehingga penulis dapat menyelesaikan skripsi ini dengan judul: PERANCANGAN PROTOTYPE KONVEYOR MULTI LEVEL SEBAGAI ALAT PEMINDAHAN BARANG BERBASIS ATMEGA 8535.
Skripsi ini disusun untuk memenuhi syarat kelulusan untuk memperoleh gelar sarjana sains dari Program Studi Fisika Fakultas MIPA Universitas Sumatera Utara.
Dalam menyelesaikan skripsi ini penulis menyadari bahwa tersusunnya skripsi ini tidak terlepas dari perhatian, bimbingan dan dukungan dari berbagai pihak, sehingga dengan keikhlasan dan kerendahan hati pada kesempatan ini penulis mengucapkan terima kasih kepada:
1. Bapak Drs. Kurnia Brahmana, M.Si selaku dosen pembimbing yang telah bersedia dengan sabar meluangkan waktunya untuk membimbing dan mengarahkan penulis dalam menyelesaikan skripsi ini.
2. Bapak Dr. Marhaposan Situmorang selaku ketua Departemen Fisika FMIPA – USU.
3. Prof. Dr. Eddy Marlianto selaku Dekan Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Sumatera Utara.
4. Seluruh dosen dan karyawan Departemen Fisika – Fakultas Matematika dan Ilmu Pengetahuan Alam – Universitas Sumatera Utara yang juga sangat berperan membantu penulis dalam menyelesaikan skripsi ini baik secara langsung maupun tidak langsung. 5. Rekan-rekan mahasiswa Fisika Ekstensi: Rakimen, Andika, Hotmaida, Fitri, Juli, Susi,
Secara khusus dan tulus dengan penuh rasa cinta penulis menyampaikan rasa hormat dan terima kasih kepada Ayahanda Ir. M. Roem MSi dan Ibunda Yasniati Lubis yang selama ini tiada henti-hentinya memberikan dukungan semangat, perhatian dan selalu mendoakan penulis dalam menyelesaikan studi di Fisika Ekstensi – Departemen Fisika – Fakultas Matematika dan Ilmu Pengetahuan Alam – Universitas Sumatera Utara.
Penulis juga menyadari bahwa Skripsi ini masih belum sempurna dalam materi dan penyajiannya. Untuk itu dengan segala kebesran hati, penulis mengharapkan saran dan kritik yang bersifat membangun dari semua pihak yang dapat menjadi bahan masukan bagi penulis.
Semoga Skripsi ini dapat menjadi suatu masukan dalam perkembangan dunia pendidikan terutama generasi penerus Fisika Instrumentasi USU.
Medan, Juni 2010 Penulis
NIM: 070821012
ABSTRAK
ABSTRACT
DAFTAR ISI
Daftar Gambar ... viii
BAB 1 – PENDAHULUAN ... 1
1.1. Latar Belakang ... 1
1.2. Tujuan Penelitian ... 2
1.3. Batasan Masalah ... 2
1.4. Manfaat Penelitian ... 2
1.5. Metode Pengumpulan Data... 3
1.6. Sistematika Penulisan ... 3
BAB 2 – LANDASAN TEORI ... 5
2.1. Mikrokontroler ATMEGA8535 ... 5
2.2. Konfigurasi Pin ATMEGA8535 ... 6
2.3. Arsitektur Mikrokontroler ATMEGA8535 ... 8
2.4. Sistem Minimum ATMEGA8535 ... 10
2.5. Sistem Clock ... 11
2.6. Organisasi Memori AVR ATMEGA8535 ... 12
2.6.1. Memori Data ... 12
2.10.1. Warna Dalam Cahaya ... 16
2.10.2. Warna Dalam Bentuk Gelombang ... 20
2.11. Internal ADC dari ATMEGA8535 ... 24
2.12. Sistem Penggerak Motor ... 24
2.12.1. Motor DC ... 24
2.12.2. Motor Servo ... 30
BAB 3 – PERANCANGAN ALAT ... 35
3.1. Diagram Block Rangkaian ... 35
3.2. Rangkaian Power Supplay (PSA) ... 36
3.3. Rangkaian Mikrokontroler ATMEGA8535 ... 37
3.4. Rangkaian Jembatan H ... 38
3.5. Rangkaian Sensor LDR ... 40
3.6. Rangkaian Sensor Kedekatan ... 42
3.7. Rangkaian Driver Motor DC ... 44
3.8. Rangkaian Motor Servo ... 47
3.9. Flowchart Sistem ... 48
BAB 4 – PENGUJIAN ALAT... 49
4.1. Pengujian Rangkaian Power Suppaly (PSA) ... 49
4.2. Pengujian Rangkaian Mikrokontroler ATMEGA8535 ... 49
4.3. Pengujian Rangkaian Jembatan H ... 51
4.4. Pengujian Rangkaian Sensor LDR ... 53
4.5. Pengujian Rangkaian Sensor Kedekatan... 54
4.6. Pengujian Motor DC ... 56
4.7. Pengujian Motor Servo ... 57
4.8. Analisa Ketelitian Alat... 58
BAB 5 – KESIMPULAN DAN SARAN ... 60
5.1. Kesimpulan ... 60
5.2. Saran ... 61
DAFTAR TABEL
DAFTAR GAMBAR
Gambar 2.1. Deskripsi Pin ATMEGA8535 ... 6
Gambar 2.2. Arsitektur Mikrokontroler ATMEGA8535 ... 8
Gambar 2.3. Sistem Minimum ATMEGA8535 ... 10
Gambar 2.4. Sistem Clock ... 11
Gambar 2.5. Konfigurasi Data AVR ATMEGA8535 ... 12
Gambar 2.6. Memori Program ATMega8535 ... 13
Gambar 2.7. Interrupt Service Routine ... 14
Gambar 2.8. Sensor Cahaya LDR ... 15
Gambar 2.9. Spektrum Cahaya pada Prisma ... 17
Gambar 2.10. Mata Melihat Apel Berwarna Merah ... 17
Gambar 2.11. Diagram Percobaan Maxwell ... 19
Gambar 2.12. Gelombang Frekuensi Warna Cahaya ... 21
Gambar 2.13. Panjang Gelombang ... 21
Gambar 2.14. Spektrum Warna ... 22
Gambar 2.15. Spektrum Gelombang Elektromagnetik ... 23
Gambar 2.16. Konstruksi Dasar Motor DC ... 25
Gambar 2.17. Gaya Medan Magnet ... 25
Gambar 2.18. Ilustrasi Sinyal PWM ... 26
Gambar 2.19. Motor DC ... 27
Gambar 2.20. Loop Kawat dalam Medan Magnet ... 28
Gambar 2.21. Loop Kawat Mendekati Bidang ... 28
Gambar 2.22. Sikat Kontak Lingkaran Kawat yang akan Merotasi ... 29
Gambar 2.23. Hitec HS-322HD Standartd Heavy Duty Servo ... 30
Gambar 2.24. Fase dan Frekuensi yang Benar Mode PWM, Waktu Diagram ... 33
Gambar 2.25. Diagram dari ATMEGA8 ... 34
Gambar 3.1. Diagram Block Perancangan Konveyor Multi Level sebagai Alat Pemindahan Barang Berbasis ATMEGA8535 ... 35
Gambar 3.2. Rangkaian Power Supplay (PSA) ... 36
Gambar 3.3. Sistem minimum ATMega8535 ... 38
Gambar 3.4. Rangkaian Jembatan H ... 39
Gambar 3.5a. Susunan Sensor Warna ... 40
Gambar 3.5b. Rangkaian Pemancar ... 40
Gambar 3.5c. Rangkaian Penerima ... 40
Gambar 3.6. Rangkaian ADC ... 41
Gambar 3.7. Rangkaian Pemancar Infra Merah ... 42
Gambar 3.8. Rangkaian Penerima Sinar Infra Merah ... 43
Gambar 3.9. Rangkaian Driver Motor DC ... 45
Gambar 3.10. Rangkaian Motor Servo ... 47
Gambar 3.11. Flowchart Perancangan Konveyor Multi Level sebagai Alat Pemindahan Barang Berbasis ATMEGA8535 ... 48
ABSTRAK
ABSTRACT
BAB I
PENDAHULUAN
1.1. LATAR BELAKANG
Dewasa ini gerakan pengautomatisasi di dunia industri sudah tidak dapat
dielakkan lagi dan merupakan suatu kewajiban untuk meningkatkan efisiensi
produksi. Efisiensi produksi dapat ditingkatkan dengan pengautomatisasi karena
mesin bisa bekerja lebih akurat dengan tingkat ketelitian yang lebih tinggi.
Salah satu sarana industri adalah konveyor. Konveyor digunakan sebagai
alat transportasi barang. Agar mobilitas barang lebih efisien dan efektif, maka
dirancang suatu konveyor otomatis. Disebut konveyor otomatis karena konveyor
tersebut diletakkan sebuah pendeteksi warna (sensor warna). Pendeteksi warna
yang dipasang dapat membedakan suatu objek agar tidak bercampurnya jenis
warna yang berbeda.
Dunia otomatisasi tidak bisa lepas dari dunia komputer. Artinya,
automatisasi dilakukan dengan komputer, baik itu berupa mikroprosesor,
mikrokontroler, maupun PC. Mikrokontroler merupakan pusat kendali untuk
menghitung, mengingat dan mengambil pilihan. Mikrokontroler adalah suatu
terobosan teknologi mikroprosesor dan mikro komputer, hadir memenuhi
kebutuhan pasar (market need) dan teknologi baru. Sebagai teknologi baru, yaitu
teknologi semikonduktor dengan kandungan transistor yang banyak namun hanya
membutuhkan ruang yang kecil serta dapat diproduksi secara massal (dalam
jumlah yang banyak) membuat harganya menjadi lebih murah (dibandingkan
dengan mikroprosesor). Sebagai kebutuhan pasar, mikrokontroler hadir memenuhi
selera industri dan para konsumen akan kebutuhan dan keinginan alat-alat bantu
bahkan mainan yang lebih baik dan canggih.
Mikrokontroler berupa sebuah chip atau IC (Integrated Circuit) yang
atau ditulis suatu data yang dapat dihapus kemudian diisi kembali dengan data
yang sesuai dengan kebutuhan.
1.2. TUJUAN
Tujuan dalam penulisan skripsi ini yaitu :
1. Memanfaatkan Mikrokontroler ATMEGA8535 sebagai pusat pengolahan data
pada alat konveyor otomatis dengan sensor warna
2. Merancang konveyor otomatis yang menggunakan sensor warna berbasis
ATMEGA8535
3. Merancang alat yang dapat mengelompokkan benda berdasarkan warnanya
dan mudah untuk digunakan
1.3. PERMASALAHAN
Permasalahan dalam skripsi ini yaitu :
1. Pengurangan tenaga kerja manusia pada industri – industri besar untuk
mengurangi biaya produksi industri.
2. Penggunaan waktu dan tenaga yang dapat diatur agar kinerja lebih efisien
sehingga produktivitas dapat ditingkatkan.
3. Penggunaan konveyor multilevel sebagai pengganti konveyor biasa.
1.4. BATASAN MASALAH
Penulis membatasi masalah skripsi dalam beberapa hal :
1. Jenis Mikrokontroler yang digunakan adalah ATMEGA 8535 sebagai pusat
pengolahan data pada alat konveyor otomatis dengan sensor warna
2. Sensor yang digunakan adalah LDR
3. ADC yang digunakan adalah internal ADC dari ATMEGA 8535
4. Motor yang digunakan adalah motor DC jenis brusless motor dc dan motor
1.5. MANFAAT PENELITIAN
Manfaat yang diharapkan dari penelitian ini adalah :
1. Untuk meningkatkan pemahaman tentang penggunaan Mikrokontroler
ATMEGA 8535 sebagai pusat pengolahan data pada alat Konveyor Otomatis
dengan sensor warna
2. Untuk mengetahui prinsip kerja LDR dan ADC internal
3. Meningkatkan pemahaman tentang prinsip kerja motor servo dan motor dc
1.6. METODE PENGUMPULAN DATA
Data yang diperoleh dalam laporan praktek proyek diperoleh melalui beberapa
cara, yaitu :
1. Melakukan studi ke perpustakaan
2. Melakukan searching dan browsing internet
3. Mencari dan mempelajari data sheet dari komponen yang dikeluarkan oleh
pabrik pembuatnya
4. Meminta pengarahan, bimbingan dan penjelasan dari dosen pembimbing
1.7. SISTEMATIKA PENULISAN
Untuk mempermudah pembahasan dalam penulisan Skripsi ini, maka penulis
membuat suatu sistematika penulisan. Adapun sistematika penulisan tersebut
adalah sebagai berikut :
BAB I : PENDAHULUAN
Bab ini berisikan tentang latar belakang, tujuan, batasan masalah,
BAB II : LANDASAN TEORI
Bab ini berisikan tentang teori-teori dasar serta pembahasan
komponen-komponen yang digunakan dalam perancangan alat
yang akan dibuat.
BAB III : PERANCANGAN ALAT
Dalam bab ini penulis menyajikan perancangan alat, antara lain
diagram blok dari rangkaian, skematik dari masing-masing
rangkaian, diagram alir dari program yang akan diisikan ke
mikrokontroler.
BAB IV : PENGUJIAN ALAT
Bab ini berisikan tentang pengujian alat, apakah alat telah
berjalan sesuai dengan yang diinginkan.
BAB V : KESIMPULAN DAN SARAN
Bab ini berisikan tentang kesimpulan yang dapat diambil penulis
BAB II
LANDASAN TEORI
Rahasia keberhasilan suatu desain terletak pada keahlian seorang desainer dalam
merancang dan membangun desain tersebut. Dalam hal ini akan dijelaskan desain
hardware dengan menggunakan mikrokontroler AVR (Alf and Vegard's Risc
processor) seri ATMEGA 8535.
2.1. Mikrokontroler ATMEGA 8535
Mikrokontroler adalah suatu keping IC dimana terdapat mikroprosesor dan
memori program (ROM) serta memori serbaguna (RAM), bahkan ada beberapa
jenis mikrokontroler yang memiliki fasilitas ADC, PLL, EEPROM dalam satu
kemasan. Penggunaan mikrokontroler dalam bidang kontrol sangat luas dan
populer.
Ada beberapa perusahaan yang membuat mikrokontroler diantaranya Intel,
Microchip, Winbond, Atmel, Philips, Xemics dan lain – lain. Dari beberapa
perusahaan tersebut, yang paling populer digunakan adalah mikrokontroler buatan
Atmel.
Mikrokontroler AVR memiliki arsitektur RISC (Reduced Instruction Set
Computing) 8 bit, di mana semua instruksi dikemas dalam kode 16-bit dan
sebagian besar instruksi dieksekusi dalam 1 siklus clock, berbeda dengan instruksi
MCS 51 yang membutuhkan 12 siklus clock. Kedua jenis mikrokontroler tersebut
memiliki arsitektur yang berbeda. AVR berteknologi RISC sedangkan seri MCS
51 berteknologi CISC (Complex Instruction Set Computing). Secara umum, AVR
dapat dikelompokkan menjadi 4 kelas, yaitu keluarga ATtiny, keluarga AT90Sxx,
keluarga ATMega dan AT86RFxx. Pada dasarnya yang membedakan masing –
masing kelas adalah memori, peripheral, dan fungsinya. Dari segi arsitektur dan
instruksi yang digunakan, mereka bisa dikatakan hampir sama. Oleh karena itu,
didapatkan dan lebih murah ATMega8535 juga memiliki fasilitas yang lengkap.
Untuk tipe AVR ada 3 jenis yaitu AT Tiny, AVR klasik, AT Mega. Perbedaannya
hanya pada fasilitas dan I/O yang tersedia serta fasilitas lain seperti
ADC,EEPROM dan lain sebagainya. Salah satu contohnya adalah AT Mega 8535.
Memiliki teknologi RISC dengan kecepatan maksimal 16 MHz membuat
ATMega8535 lebih cepat bila dibandingkan dengan varian MCS 51. Dengan
fasilitas yang lengkap tersebut menjadikan ATMega8535 sebagai mikrokontroler
yang powerfull.
2.2. Konfigurasi Pin AT MEGA 8535
Gambar 2.1. Deskripsi Pin AT Mega 8535
Dari gambar tersebut dapat dijelaskan secara fungsional konfigurasi pin
ATMega8535 sebagai berikut:
2. GND merupakan pin ground.
3. Port A (PA0..PA7) merupakan pin I/O dua arah dan pin masukan ADC.
Port A berfungsi sebagai input analog pada A/D Konverter. Port A juga
berfungsi sebagai suatu Port I/O 8-bit dua arah, jika A/DKonverter tidak
digunakan. Pin - pin Port dapat menyediakanresistor internal pull-up (yang
dipilih untuk masing-masing bit). Port A output buffer mempunyai
karakteristik gerakan simetrisdengan keduanya sink tinggi dan kemampuan
sumber. Ketika pin PA0 ke PA7 digunakan sebagai input dan secara eksternal
ditarik rendah, pin – pin akan memungkinkan arus sumber jika resistor
internal pull-up diaktifkan. Pin Port A adalah tri-stated manakala suatu
kondisi reset menjadi aktif, sekalipun waktu habis.
4. Port B (PB0..PB7) merupakan pin I/O dua arah dan pin fungsi khusus, yaitu
Timer/Counter,komparator analog,dan SPI.
Port B adalah suatu Port I/O 8-bit dua arah dengan resistor internalpull-up
(yang dipilih untuk beberapa bit). Port B output buffer mempunyai
karakteristik gerakan simetris dengan keduanya sink tinggi dan kemampuan
sumber. Sebagai input, pin port B yang secara eksternal ditarik rendah akan
arus sumber jika resistor pullup diaktifkan. Pin Port B adalah tri-stated
manakala suatu kondisi reset menjadi aktif, sekalipun waktu habis.
5. Port C (PC0..PC7) merupakan pin I/O dua arah dan pin fungsi khusus, yaitu
TWI,komparator analog dan Timer Oscillator.
Port C adalah suatu Port I/O 8-bit dua arah dengan resistor internalpull-up
(yang dipilih untuk beberapa bit). Port C output buffer mempunyai
karakteristik gerakan simetris dengan keduanya sink tinggi dan kemampuan
sumber. Sebagai input, pin port C yangsecara eksternal ditarik rendah akan
arus sumber jika resistor pullup diaktifkan. Pin Port C adalah tri-stated
manakala suatu kondisi reset menjadi aktif, sekalipun waktu habis.
6. Port D (PD0..PD7) merupakan pin I/O dua arah dan pin fungsi khusus, yaitu
komparator analog,interupsi eksternal,dan komunikasi serial.
Port D adalah suatu Port I/O 8-bit dua arah dengan resistor internalpull-up
(yang dipilih untuk beberapa bit). Port D output buffer mempunyai
sumber. Sebagai input, pin port D yangsecara eksternal ditarik rendah akan
arus sumber jika resistor pullup diaktifkan. Pin Port D adalah tri-stated
manakala suatu kondisi reset menjadi aktif, sekalipun waktu habis.
7. RESET merupakan pin yang digunakan untuk me-reset mikrokontroler.
8. XTAL1 (Input Oscillator) dan XTAL2 (Output Oscillator) merupakan pin
masukan clock ekstenal.
9. AVCC merupakan pin masukan tegangan untuk ADC.
10. AREF merupakan pin masukan tegangan referensi ADC.
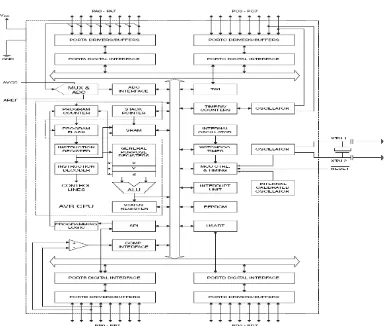
2.3. Arsitektur Mikrokontroller AT MEGA 8535
SISTEM MINIMUM AT MEGA 8535
Gambar 2.2. Arsitektur Mikrokontroller ATMEGA 8535
Dari gambar tersebut dapat dilihat bahwa ATMega8535 memiliki bagian
sebagai berikut:
1. Saluran I/O sebanyak 32 buah, yaitu Port A, Port B, Port C, dan Port D.
3. Tiga buah Timer/Counter dengan kemampuan pembandingan.
4. CPU yang terdiri atas 32 buah register.
5. Watchdog Timer dengan osilator internal.
6. SRAM sebesar 512 byte.
7. Memori Flash sebesar 8 kb dengan kemampuan Read While Write.
8. Unit interupsi internal dan eksternal.
9. Port antarmuka SPI.
10. EEPROM sebesar 512 byte yang dapat diprogram saat operasi.
11. Antarmuka komparator analog.
12. Port USART untuk komunikasi serial.
Fitur ATMega8535 Kapabilitas detail dari ATMega8535 adalah sebagai
berikut:
1. Sistem mikroprosesor 8 bit berbasis RISC dengan kecepatan maksimal 16 Mhz.
2. Kapabilitas memory flash 8KB,SRAM sebesar 512 byte,dan EEPROM
(Electrically Erasable Programmable Read Only Memory) sebesar 512 byte.
3. ADC internal dengan fidelitas 10 bit sebanyak 8 channel.
4. Portal komunikasi serial (USART) dengan kecepatan maksimal 2,5 Mbps.
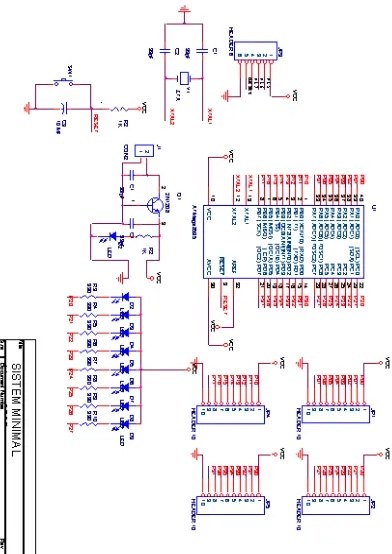
2.4. Sistem Minimum AT MEGA 8535
Sistem diatas bekerja sebagai berikut:
Kapasitor C1 dan Resistor R1 digunakan untuk sistem Reset, saat pertama
suplay diberikan ke mikrokontroler maka kaki 9 akan berlogika 1, selama 2 siklus
mesin. Setelah itu pin 9 akan berlogika 0 kembali. Proses seperti ini bisa terjadi
berdasarkan proses pengisian dan pengosongan kapasitor.
Kapasitor C2 dan C3, dipasang bersamaan dengan keramik resonator (x-tal) untuk
menghasilkan Clock internal. Nilai dari clok ini tergantung dari keramik resonator
(x-tal) yang diberikan.
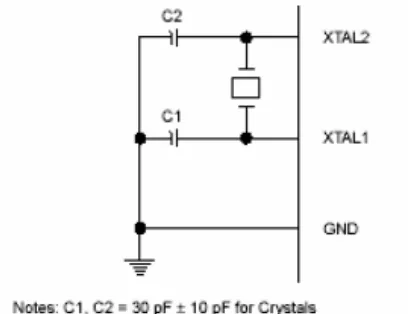
2.5. Sistem Clock
Mikrokontroler, mempunyai sistem pewaktuan CPU, 1 siklus clock. Artinya
setiap 1 siklus yang dihasilkan oleh ceramic resonator maka akan menghasilkan
satu siklus mesin. Nilai ini yang akan menjadi acuan waktu operasi CPU. Untuk
mendesain sistem mikrokontroler kita memerlukan sistem clock, sistem ini bisa di
bangun dari clock eksternal maupun clock internal. Untuk clock internal, kita
tinggal memasang komponen seperti di bawah ini:
2.6. Organisasi Memori AVR ATMega8535
AVR ATMega8535 memiliki ruang pengamatan memori data dan memori
program yang terpisah. Sebagai tambahan, ATmega8535 memiliki fitur suatu
EEPROM Memori untuk penyimpanan data. Semua tiga ruang memori adalah
reguler dan linier.
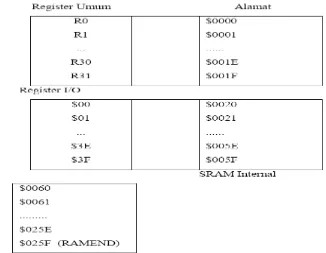
2.6.1. Memori Data
Memori data terbagi menjadi 3 bagian, yaitu 32 register umum,64 buah register
I/O,dan 512 byte SRAM Internal. Register keperluan umum menempati space data
pada alamat terbawah, yaitu $00 sampai $1F. Sementara itu, register khusus untuk
menangani I/O dan kontrol terhadap mikrokontroler menempati 64 alamat
berikutnya, yaitu mulai dari $20 hingga $5F. Register tersebut merupakan register
yang khusus digunakan untuk mengatur fungsi terhadap berbagai peripheral
mikrokontroler, seperti kontrol register, timer/counter, fungsi – fungsi I/O, dan
sebagainya. Alamat memori berikutnya digunakan untuk SRAM 512 byte, yaitu
pada lokasi $60 sampai dengan $25F. Konfigurasi memori data ditunjukkan pada
Gambar 2.5. Konfigurasi Data AVR AT Mega 8535
2.6.2. Memori Program
ATmega8535 berisi 8K bytes On-Chip di dalam sistem Memoriflash
Reprogrammable untuk penyimpanan program. Karena semua AVR instruksi
adalah 16 atau 32 bits lebar, Flash adalah berbentuk 4K x16. Untuk keamanan
perangkat lunak, Flash Ruang program memori adalah dibagi menjadi dua bagian,
bagian boot program dan bagian aplikasi program dengan alamat mulai dari $000
sampai $FFF. Flash Memori mempunyai suatu daya tahan sedikitnya
10,000write/erase Cycles. ATmega8535 Program Counter (PC) adalah 12 bit
lebar, alamat ini 4K lokasi program memori.
Gambar 2.6. Memori Program AT Mega 8535
ATmega8535 mempunyai empat buah port yang bernama PortA, PortB, PortC,
dan PortD. Keempat port tersebut merupakan jalur bi-directional dengan pilihan
internal pull-up. Tiap port mempunyai tiga buah register bit, yaitu DDxn,
PORTxn, dan PINxn. Huruf ‘x’ mewakili nama huruf dari port sedangkan huruf
‘n’ mewakili nomor bit. Bit DDxn terdapat pada I/O address DDRx, bit PORTxn
terdapat pada I/O address PORTx, dan bit PINxn terdapat pada I/O address PINx.
Bit DDxn dalam regiter DDRx (Data Direction Register) menentukan arah pin.
Bila DDxn diset 1 maka Px berfungsi sebagai pin output. Bila DDxn diset 0
makaPx berfungsi sebagai pin input.
2.8. Interupsi
Interupsi adalah suatu kejadian atau peristiwa yang menyebabkan mikrokontroler
berhenti sejenak untuk melayani interupsi tersebut. Cara menggunakan interupsi
adalah, harus mengetahui sumber-sumber interupsi, vektor layanan interupsi dan
yang terpenting rutin layanan interupsi, yaitu subrutin yang akan dikerjakan bila
terjadi interupsi .
Analoginya adalah sebagai berikut, seseorang sedang mengetik laporan,
mendadak telephone berdering dan menginterupsi orang tersebut sehingga
menghentikan pekerjaan mengetik dan mengangkat telephone. Setelah
pembicaraan telephone selesai maka orang tersebut kembali meneruskan
pekerjaannya mengetik. Demikian pula pada sistem mikrokontroler yang sedang
menjalankan programnya, saat terjadi interupsi, program akan berhenti sesaat,
melayani interupsi tersebut dengan menjalankan program yang berada pada
alamat yang ditunjuk oleh vektor dari interupsi yang terjadi hingga selesai dan
kembali meneruskan program yang terhenti oleh interupsi tadi. Seperti yang
Gambar 2.7. Interrupt Service Routine
Pada AVR terdapat 3 pin interupsi eksternal, yaitu INT0, INT1,dan INT2.
Interupsi eksternal dapat dibangkitkan apabila ada perubahan logika atau logika 0
pada pin interupsi pengaturan kondisi keadaan yang menyebabkan terjadinya
interupsi eksternal diatur oleh register MCUCR ( MCU Control Register).
2.9. Sensor Cahaya
Resistor jenis lainnya adalah Light dependent resistor (LDR). Resistansi LDR
berubah seiring dengan perubahan intensitas cahaya yang mengenainya. Dalam
keadaan gelap resistansi LDR sekitar 10MΩ dan dalam keadaan terang sebesar
1KΩ atau kurang. LDR terbuat dari bahan semikonduktor seperti kadmium
sulfida. Dengan bahan ini energi dari cahaya yang jatuh menyebabkan lebih
banyak muatan yang dilepas atau arus listrik meningkat. Artinya resistansi bahan
telah mengalami penurunan.
LDR digunakan untuk mengubah energi cahaya menjadi energi listrik.
Saklar cahaya otomatis dan alarm pencuri adalah beberapa contoh alat yang
menggunakan LDR. Akan tetapi karena responsnya terhadap cahaya cukup
lambat, LDR tidak digunakan pada situasi dimana intesitas cahaya berubah secara
drastis.
Sensor cahaya berfungsi untuk mendeteksi cahaya yang ada di sekitar kita.
Sensor yang terkenal untuk mendeteksi cahaya ialah LDR(Light Dependent
Resistor). Sensor ini akan berubah nilai hambatannya apabila ada perubahan
tingkat kecerahan cahaya.
Prinsip inilah yang akan digunakan untuk mengaktifkan transistor untuk
dapat menggerakkan motor DC (mirip dengan dinamo pada mainan
mobil-mobilan anak-anak). Perubahan nilai hambatan pada LDR tersebut akan
menyebabkan perubahan beda tegangan pada input basis transistor, sehingga akan
mengaktif/nonaktifkan transistor. Penerapan lain dari sensor LDR ini ialah pada
Alarm pencuri.
2.10. Teori Warna
2.10.1. Warna dalam Cahaya
Warna dapat didefenisikan sebagai bagian dari pengamatan indera penglihatan,
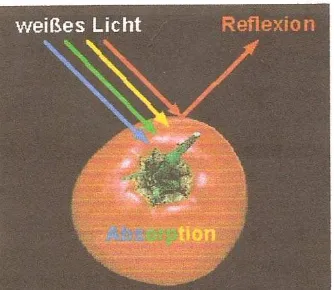
atau sebagai sifat cahaya yang dipancarkan. Proses terlihatnya warna adalah
dikarenakan adanya cahaya yang menimpa suatu benda, dan benda tersebut
memantulkan cahaya ke mata (retina) kita hingga terlihatlah warna. Benda
berwarna merah karena sifat pigmen benda tersebut memantulkan memantulkan
warna merah dan menyerap warna lainnya. Benda berwarna hitam karena sifat
pigmen benda tersebut menyerap semua wana. Sebaliknya suatu benda berwarna
putih karena sifat pigmen benda tersebut memantulkan semua warna. Teori dan
pengenalan warna telah banyak dipaparkan oleh para ahli, diantaranya sebagai
berikut :
a. Teori Newton (1642-1727)
Pembahasan mengenai keberadaan warna secara ilmiah dimulai dari hasil temuan
Sir Isaac Newton yang dimuat dalam bukunya ”Optics”(1704). Ia mengungkapkan
setiap benda. Asumsi yang dikemukakan oleh Newton didasarkan pada
penemuannya dalam sebuah eksperimen. Di dalam sebuah ruang gelap, seberkas
cahaya putih matahari diloloskan lewat lubang kecil dan menerpa sebuah prisma.
Ternyata cahaya putih matahari yang bagi kita tidak tampak berwarna, oleh
prisma tersebut dipecahkan menjadi susunan cahaya berwarna yang tampak di
mata sebagai cahaya merah, jingga, kuning, hijau, biru, nila dan ungu, yang
kemudian dikenal sebagai susunan spektrum dalam cahaya. Jika spektrum cahaya
tersebut dikumpulkan dan diloloskan kembali melalui sebuah prisma, cahaya
tersebut kembali menjadi cahaya putih (seperti cahaya matahari) sesungguhnya
meupakan gabungan cahaya berwarna dalam spektrum.
Gambar 2.9. Spektrum Cahaya pada Prisma
Newton kemudian menyimpulkan bahwa benda-benda sama sekali tidak
berwarna tanpa ada cahaya yang menyentuhnya. Sebuah benda tampak kuning
karena fotoreseptor (penangkapan/penerima cahya) pada mata manusia
menangkap cahaya kuning yang dipantulkan oleh benda tersebut. Sebuah apel
tampak merah bukan karena apel tersebut berwarna merah, tetapi karena apel
tersebuthanya memantulkan cahaya merah dan menyerap warna cahaya lainnya
Gambar 2.10. Mata Melihat Apel Berwarna Merah
Cahaya yang dipantulkan hanya merah, lainnya diserap. Maka warna yang
tampak pada pengamatan adalah merah. Sebuah benda berwarna putih karena
benda tersebut memantulkan semua cahaya spektrum yang menimpanya dan tidak
satupun diserapnya. Dan sebuah benda tampak hitam jika benda tersebut
menyerap semua unsur warna cahaya dalam spektrum dan tidak satupun
dipantulkan atau benda tersebut berda dalam gelap. Cahaya adalah satu-satunya
sumber warna dan benda-benda yang tampak berwarna semuanya hanyalah
pemantul, penyerap dan penerus warna-warna dalam cahaya.
b. Teori Young (1801) dan Helmholtz (1850)
Thomas Young seorang ilmuan berkebangsaan Inggris adalah orang pertama yang
memberi dukungan yang masuk akal terhadap pernyataan Newton tentang
penglihatan warna. Asumsi Newton tentang penglihatan, cahaya dan keberadaan
warna-warna benda diuji kembali. Young membenarkan beberapa asumsi-asumsi
Newton, tapi Young menolak pernyataan Newton yang menyatakan bahwa mata
memiliki banyak reseptor untuk menerima bermacam warna. Pada tahun 1801
Thomas Young mengemukakan hipotesa bahwa mata manusia hanya memiliki 3
buah reseptor penerima cahaya, yaitu reseptor yang peka terhadap cahaya biru,
merah dan hijau. Seluruh penglihatan warna didasarkan pada ketiga reseptor
tersebut. Tetapi Young hampir tidak melakukan eksperimen apapun untuk
mendukung pernyataannya.
Seorang ahli penglihatan Jerman Hermann Von Helmholtz menghidupkan
terkenal dengan “Teori Young-Helmholtz” atau “Teori Penglihatan 3 Warna” atau
“Teori 3 Reseptor”. Melalui ketiga reseptor pada retina mata kita dapat melihat
semua warna dan membeda-bedakannya. Jika cahaya menimpa benda, maka
benda tersebut akan memantulkan satu atau lebih cahaya dalam spektrum. Jika
cahaya yang dipantulkan tersebut menimpa mata, maka reseptor-reseptor di retina
akan terangsang salah satunya, dua, atau ketiganya sekaligus, Jika cahaya biru
sampai ke mata, reseptor yang peka birulah yang terangsang, dan warna yang
tampak adalah biru. Jika reseptor hijau yang terangsang , maka warna yang
tampak adalah hijau, dan kalau reseptor merah yang terangsang warna yang
tampak adalah merah.
c. Eksperimen James Clerck Maxwell (1855-1861)
Penemuan Young dan Helmholtz membuktikan bahwa terdapat hubungan antara
warna cahaya yang datang ke mata dengan warna yang diterima di otak. Hal ini
merupakan dukungan awal terhadap asumsi Newton tentanng cahaya dan
warna-warna benda. Asumsi Newton menyatakan bahwa benda yang tampak berwarna-warna
sebenarnya hanyalah penerima, penyerap, dan penerus warna cahaya yang ada
dalam spektrum. James Clerck Maxwell membuat serangkaian percobaan dengan
menggunakan proyektor cahaya dan penapis (filter) berwarna.3 buah proyektor
yang telah diberi penapis (filter) warna yang berbeda disorotkan ke layar putih di
ruang gelap. Penumpukkan dua atau tiga cahaya berwarna ternyata menghasilkan
warna cahaya yang lain (tidak dikenal) dalam pencampuran warna dengan
menggunakan tinta/cat/bahan pewarna. Penumpukan (pencampuran) cahaya hijau
dan cahaya merah, misalnya mennghasilkan warna kuning.
Hasil eksperimen Maxwell menyimpulkan bahwa warna hijau, merah dan
biru merupakan warna-warna primer (utama) dalam pencampuran warna cahaya.
Warna primer adalah warna-warna yang tidak dapat dihasilkan lewat
pencampuran warna apapun. Melalui warna-warna primer cahaya ini (biru, hijau
dan merah) semua warna cahaya dapat dibentuk dan diciptakan. Jika ketiga warna
eksperimen 3 proyektor yang didemonstrasikan Maxwell, maka ditunjukkan
sebagai berikut:
Gambar 2.11. Diagram Percobaan Maxwell
Eksperimen Maxwell merupakan model atau tiruan yang bagus sekali
untuk memudahkan pemahaman kita tentang bagaimana reseptor mata menangkap
cahaya sehingga menimbulkan penglihatan berwarna di otak.
Pencampuran warna dalam cahaya dan bahan pewarna menunjukkan
gejala yang berbeda. Sekalipun begitu, dengan memperhatikan hasilnya secara
seksama pada percampuran masing-masing warna primer, dapatkah diperkirakan
adanya suatu hubungan yang saling terkait satu sama lain. Warna kuning dalam
cahaya ternyata dapat dihasilkan dengan menambahkan warna cahaya primer
hijau pada cahaya merah. Cara menghasilkan warna cahaya baru dengan
mencampurkan 2 atau lebih warna cahaya disebut “pencampuran warna secara
aditif” (additive=penambahan). Warna-warna utama cahaya (merah, hijau, biru)
selanjutnya kemudian dikenal juga sebagai warna-warna utama aditif (additive
primaries).Pencampuran warna secara aditif hanya dipergunakan dalam
percampuran warna cahaya.
Hasil percampuran warna ini menunjukkan gejala yang berbeda bidang
pencampuran warna seperti pada cat. Dengan pencampuran bahan pewarna (cat) ,
waarna cat merah dapat dihasilkan dengan mencampur cat warna primer magenta
dan cat warna primer yellow. Mencampurkan 2 atau lebih cat berwarna pada
hakekatnya adalah mengurangi intensitas dan jenis warna cahaya yang dapat
terpantul kembali oleh benda /cat tersebut. Pencampuran warna serupa ini dengan
menggunakan pewarna/cat kemudian disebut dengan pencampuran warna secara
pewarna kemudian lazim disebut dengnan warna-warna utama/primer substraktif
(substractive primaries).
2.10.2. Warna Dalam Bentuk Gelombang
Gelombang pada dasarnya adalah suatu cara perpindahan energi dari satu tempat
ke tempat lainnya. Energi dipindahkan melalui pergerakan lokal yang relatif kecil
pada lingkungan sekitarnya. Energi pada sinar berjalan karena perubahan lokal
yang fluktuatif pada medan listrik dan medan magnet, oleh karena itu disebut
radiasi elektromagnetik.
a. Panjang gelombang, frekuensi, dan kecepatan cahaya
Setiap warna mempunyai panjang gelombang dan frekuensi yang berbeda.
Bentuknya dapat ditunjukkan dalam suatu bentuk gelombang sinusoida. Berikut
gambar gelombang dari berbagai macam frekuensi warna:
Gambar 2.12. Gelombang Frekuensi Warna Cahaya
Jika kita menggambarkan suatu berkas sinar sebagai bentuk gelombang, jarak
antara dua puncak atau jarak antara dua lembah atau dua posisi lain yang identik
dalam gelombang dinamakan panjang gelombang.
Puncak-puncak gelombang ini bergerak dari kiri ke kanan. Jika dihitung
banyaknya puncak yang lewat tiap detiknya, maka akan didapatkan frekuensi.
Pakar fisika kebangsaan Jerman Heinrich Rudolf Hertz yang mengemukakan
fenomena ini pertama kali, lalu hasil perhitungan ini dinyatakan dalam satuan
hertz (Hz). Frekuensi sebesar 1 Hz menyatakan peristiwa gelombang yang terjadi
satu kali per detik. Sebagai alternatif, dapat diukur waktu antara dua buah
kejadian/ peristiwa (dan menyebutnya sebagai periode), lalu ditentukan frekuensi
(f) sebagai hasil kebalikan dari periode (T), seperti nampak dari rumus dibawah
ini:
T
f = 1...(2.1)
Sinar orange, mempunyai frekuensi sekitar 5 x 1014 Hz (dapat dinyatakan
dengan 5 x 108 MHz-megahertz). Artinya terdapat 5 x 1014 puncak gelombang
yang lewat tiap detiknya. Sinar mempunyai kecepatan tetap pada media apapun.
Sinar selalu melaju pada kecepatan sekitar 3 x 108 meter per detik pada kondisi
hampa, dan dikenal dengan kecepatan cahaya. Terdapat hubungan yang sederhana
antara panjang gelombang dan frekuensi dari suatu warna dengan kecepatan
cahaya:
Hubungan ini artinya jika kita menaikkan frekuensi, maka panjang
gelombang akan berkurang. Sebagai contoh, jika kita mendapatkan mendapatkan
sinar warna merah mempunyai panjang gelombang 650 nm, dan hijau 540 nm,
maka dapat diketahui bahwa warna hijau memiliki frekuensi yang besar daripada
warna merah.
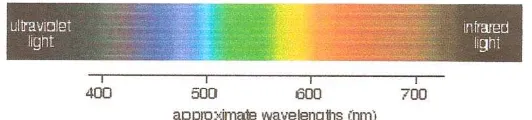
Warna yang kita lihat diinterpretasikan dalam bentuk spektrum warna atau
spektrum sinar tampak :
Gambar 2.14. Spektrum Warna
Dan warna-warna utama dari spektrum sinar tampak adalah :
Tabel 2.1. Spektrum Warna
Warna Panjang Gelombang (nm)
Ungu 380 – 435
Biru 435 – 500
Sian (biru pucat) 500 – 520
Hijau 520 – 565
Kuning 565 – 590
Orange 590 – 625
Merah 625 – 740
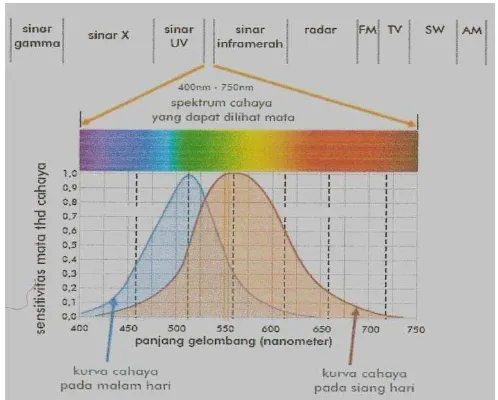
Pada kenyataannya, warna saling bercampur satu sama lain. Spektrum
warna tidak hanya terbatas pada warna-warna yang dapat kita lihat. Sangat
mungkin mendapat panjang gelombang yang lebih pendek dari sinar ungu atau
lebih panjang dari sinar merah. Pada spektrum yang lebih lengkap, akan
ditunjukkan ultra-ungu dan infra-merah, tetapi dapat diperlebar lagi hingga
sinar-X dan gelombang radio, diantara sinar lain. Gambar berikut menunjukkan posisi
Gambar 2.15. Spektrum Gelombang Elektromagnetik
2.11. Internal ADC dari ATMEGA 8535
ADC (Analog Digital Converter) merupakan sebuah interface yang dapat
merubah tegangan analog menjadi digital. Karena mikrokontroler hanya
memiliki masukan berupa data-data digital, maka agar mikrokontroler dapat
membaca tegangan analog, ADC lah temannya.
ATmega8535 memiliki 8 saluran ADC, maka untuk keperluan konversi
sinyal analog menjadi data digital yang berasal dari sensor cahaya dapat langsung
dilakukan prosesor utama. Beberapa karakteristik ADC internal ATmega8535
adalah :
a. Mudah dalam pengoperasian.
b. Resolusi 10 bit.
c. Memiliki 8 masukan analog.
d. Konversi pada saat CPU sleep.
e. Interrupt waktu konversi selesai.
2.12. Sistem Penggerak Motor
Pemilihan motor untuk pergerakan benda adalah sangat penting dalam
menentukan unjuk kerja sistem dalam melakukan pergerakan. Motor harus
2.12.1. Motor DC
Motor DC (Direct Current Motor) adalah peralatan elektromekanik dasar yang
berfungsi untuk mengubah tenaga listrik menjadi tenaga mekanik. Bagian utama
dari motor dc terdiri dari dua bagian yaitu bergerak yang disebut rotor (jangkar),
dan bagian yang diam disebut stator.
Gambar 2.16. Konstruksi Dasar Motor DC
Masing – masing bagian mempunyai lilitan kawat. Pada stator, lilitan
kawat berfungsi sebagai pembangkit medan magnet, sedangkan pada rotor, lilitan
berfungsi sebagai pembangkit gaya gerak listrik. Rotor yang dialiri arus listrik
diletakkan dalam medan magnet tetap. Akibatnya tercipta gaya pada kumparan
baik pada sisi A maupun pada sisi B (dapat diihat pada gambar 2.17). Gaya yang
ditimbulkan tersebut adalah gaya lorentz, yaitu gaya interaksi arus atau muatan
listrik yang bergerak dengan medan magnet homogen yang mempengaruhinya,
yang dinyatakan dalam:
F = B i l sin Ɵ………(2.3)
Sehungga gaya tarik menarik atau tolak menolak yang terjadi antara rotor dengan
Gambar 2.17. GayaMedan Magnet
Perputaran motor DC secara umum berbanding lurus dengan tegangan yang
diinputkan pada terminalnya. Oleh karena itu untuk mendapatkan putaran rendah
mka terminal diberi tegangan rendah minimal 3 volt dan untuk mendapatkan
putaran tinggi maka terminal input diberi tegangan yang tinggi maksimal 12 volt.
Untuk dapat mengendalikan perputaran motor DC, maka kita harus membuat
tegangan out put yang bervariasi ( dapat diatur mulai dari 0 volt hingga tegangan
maksimum secara linier).
Solusi dari permasalahan diatas adalah PWM. PWM (Pulse Width
Modulation) adalah suatu teknik manipulasi dalam pengendalian motor
mengunakan prinsip cut-off dan saturasi. Dalam satu siklus perioda diatur lebar
pulsa low. Lebar pulsa high pada saat saturasi dan lebar pulsa low pada saat
cut-off. Dengan mengatur lebar pulsa high dan lebar pulsa low dalam satu siklus,
dapat ditentukan siklus kerja atau duty cycle.
………(2.4)
Gambar 2.18. Ilustrasi Sinyal PWM
Motor akan berputar selama lebar pulsa high, dan tidak akan berputar
selama lebar pulsa low. Pada gambar diketahui duty cycle adalah 75%, artinya
kecepatan motor hanya akan berputar 75% dari kecepatan penuh. Begitu juga
pada gambar duty cycle yang 50% artinya kecepatan motor hanya akan berputar
50% dari kecepatan penuh. Dengan demikian kecepatan motor dapat di control.
Dari penjelasan di atas dapat diketahui bahwa jika dikehendaki kecepatan penuh
maka diberi lebar pulsa high secara konstan. Jika dikehendaki kecepatan
bervariasi maka diberikan pulsa yang lebar high dan lownya bervariasi.
Pembangkitan pulsa PWM diperoleh melalui fasilitas timer yang terdapat pada
mikrokontroler ATMEGA8535 dengan memberikan tundaan pada saat high dan
saat low.
Kecepatan perputaran motor dinyatakan dalam rotation per minute (rpm)
atau dapat diartikan sebagai jumlah putaran dalam satu menitnya. Kecepatan
motor DC berbanding terbalik dengan torsi yang dihasilkannya. Torsi pada motor
DC dapat diartikan dengan perbandingan daya kerja motor DC dengan kecepatan
perputarannya. Sehingga dapat dirumuskan dengan :
……….(2.5)
Dengan P adalah daya kerja motor dalam satuan watt dan adalah kecepatan
perputaran motor dalam satuan rotation per minute (rpm).
Motor DC banyak digunakan di robotik untuk ukuran kecil dan output
energi tinggi. Harganya murah, kecil, dan kuat. Khas motor DC beroperasi
yang beroperasi pada 6, 12, atau 24 volt. Menjalankan motor DC dengan
kecepatan dari beberapa ribu sampai sepuluh ribu RPM. Tegangan rendah
(misalnya, 12 volt atau kurang) motor DC dapat menarik dari 100 milliamps ke
beberapa ampli, tergantung pada desain. Karakteristik utama DC Motors meliputi:
kecepatan tinggi, torsi rendah, pembalik dan gerak terus menerus.
Gambar 2.19. Motor DC
Jika menempatkan sebuah loop kawat dalam medan magnet yang
kuat dengan cara yang ditunjukkan (Gambar 2.17) , maka loop tersebut akan
mengalami tindakan motor sedemikian rupa sehingga loop kawat akan mencoba
untuk berpaling.
Efek ini hanya akan terjadi ketika kawat diletakkan berdekatan atau sejalan
dengan magnetik bidang (Gambar 2.18).
Gambar 2.21. Loop Kawat Mendekati Bidang
sisi kanan kontak dan kontak loop asli membuat kontak dengan sisi ruas kiri. Jika
meneliti konsep ini dengan hati-hati dapat dilihat bahwa sementara arus
diterapkan pada sikat kontak lingkaran kawat akan merotasi melalui kontak 180
derajat di mana akan dibuat lagi dan rotor (yang berputar hal) akan terus rotasi.
Gambar 2.22. Sikat Kontak Lingkaran Kawat yang akan Merotasi
Arah rotasi tergantung pada: Polaritas baterai (Power Source).
dalam yang berputar. Masing-masing ujung kawat diatur untuk menghubungkan
himpunan disebut komutator. Torsi dari motor adalah gaya putar yang dihasilkan
pada poros output. Ketika motor itu mogok menghasilkan jumlah maksimum torsi
yang dapat menghasilkan. Oleh karena rating torsi biasanya diambil ketika motor
telah terhenti dan disebut torsi kios. Kekuatan sebuah motor adalah produk dari
kecepatan dan torsi. Daya output terbesar dibongkar di suatu tempat antara
kecepatan (kecepatan maksimum, tidak ada torsi) dan terhenti (torsi maksimum,
tidak ada kecepatan). Motor yang menarik lebih banyak arus akan memberikan
kekuasaan yang lebih besar. Juga, motor tertentu menarik lebih banyak arus
memberikan lebih banyak output torsi. Praktis motor rotor terdiri dari beberapa set
kawat setiap rangkaian yang terdiri dari sepotong kawat dibungkus mungkin
sekali mengelilingi loop.
2.12.2. Motor Servo
Gambar 2.23
Alasan penggunaan motor ini dikarenakan penggunaan motor servo tidak
memerlukan gearbox serta rangkaian driver, hal ini disebabkan pada motor servo
itu sendiri sudah terdapat gearbox dan driver elektronik sehingga motor servo
dapat langsung dihubungkan dengan mikrokontroler. Selain itu untuk motor
seukurannya motor servo mempunyai daya torsi yang cukup besar. Motor servo
memiliki tiga kabel terhubung untuk power supply dengan besar tegangan
berkisar 5 sampai 7 volt. Kabel ketiga merupakan kabel pengendali yang dapat
langsung dihubungkan ke mikrokontroller. Posisi perputaran motor dapat
servo untuk mengontrol pergerakan motor digunakan metoda PWM (Pulse Width
Modulation). PWM adalah merupakan suatu metoda untuk mengatur pergerakan
motor dengan cara mengatur prosentase lebar pulsa high terhadap perioda dari
suatu sinyal persegi dalam bentuk tegangan periodik yang diberikan ke motor.
Motor servo akan dapat menerima pulsa setiap 20 ms. Panjang dari pulsa
akan berpengaruh terhadap perputaran dari motor, sebagai contoh jika panjang
pulsa 1,5 ms, akan membuat motor berputar sebanyak 900, jika lebar pulsa lebih
besar dari 1.5 ms, motor akan berputar mendekati 1800 sedangkan jika lebih kecil
dari 1,5 ms motor akan berputar mendekati 00. Motor servo dapat berputar
sebanyak 900 sampai 1800, selain itu ada juga yang dapat berputar 3600.
Mikrokontroler ATmega 8535 diprogram sebagai controlled PWM generator.
Didalam mikrokontroler ATmega 8535 akan dilakukan pemrosesan data yang
diterima dari prosesor menjadi sinyal persegi yang telah termodulasi lebar
pulsanya. PWM_01, PWM_02, PWM_.., dan PWM_12 adalah jalur keluaran
gelombang pulsa, karena arah perputaran motor servo bergantung pada nilai pulsa
yang diberikan hanya bergantung pada dua belas output pin ini.
Karena motor servo sudah mempunyai rangkaian driver maka
mikrokontroler ATmega 8535 dapat langsung memberikan arus output maksimal
ke motor servo sehingga sinyal PWM yang dihasilkan dapat langsung digunakan
untuk mengoperasikan motor agar dapat beroperasi.
2.12.2.1. Menghasilkan sinyal PWM menggunakan Timer di chip ATMega
Ini adalah panduan untuk mengendalikan unhacked servos menggunakan Timer1
pada ATMega8 chip. Penggunaan Timers ATMega128 atau berbeda,
teknik-teknik dan ide-ide dapat dengan mudah diterapkan. Pertama sedikit informasi
mengenai pengendalian servo. Servos memiliki tiga input kabel: Merah = Vcc
(antara 4.8V dan 6V merupakan standar), Black = Ground, White = PWM.
Masukan Servo kontrol dilakukan dengan mengirimkan modulator lebar pulsa
PWM sinyal ke input pin. Servo membandingkan sinyal ke posisi yang
PWM 50Hz sinyal konstan (a 50 Hz sinyal adalah salah satu yang berulang setiap
20 ms).
1 / 50 Hz = 20 ms
Sinyal akan memberikan servo salah satu yang tinggi (5V) untuk 1-2ms dan
rendah (0V) untuk remainer dari periode 20ms. Durasi sinyal tinggi menentukan
posisi servo upaya untuk mempertahankan. Servo harus terus-menerus menerima
sinyal ini untuk mempertahankan posisinya.
1.0ms = penuh kiri
1.5ms = tengah
2.0ms = penuh kanan
Dengan asumsi menggunakan servo yang memiliki 90 derajat rotasi:
penuh kiri = 0 derajat
tengah = 45 derajat
penuh kanan = 90 derajat
Berbeda servo memiliki rentang yang berbeda putaran penuh sendiri kiri, tengah,
dan hak penuh mungkin sesuai dengan sudut yang berbeda. Mungkin juga
menemukan bahwa dalam rangka untuk mencapai kisaran penuh gerak harus
mengirim servo pulsa tinggi lagi yang 2.0ms atau lebih singkat dari 1.0ms.
Fase dan Frekuensi modus Benar:
Untuk menghasilkan sinyal 50Hz dengan sinyal yang tinggi yang
bervariasi antara 1-2ms, menggunakan Frekuensi Fase dan modus dari Timer pada
ATMega Atmel chip.
Dalam Fase dan Frekuensi modus Benar timer akan dimulai dari nol,
menghitung sampai dengan nilai yang ditetapkan pengguna yang disebut ICRn (n
adalah nomor timer. Dalam contoh ini, akan menggunakan Timer1 dan dengan
demikian ICR1), dan kemudian menghitung kembali ke nol.
Dalam rangka untuk menentukan nilai ICR1, harus mengetahui dua hal:
a. Sistem clock speed
b. Timer clock speed
Menggunakan papan MDMicro Maveric, itu kemungkinan besar akan 16MHz.
Prescaler diatur oleh CSn2: 0 bit yang berlokasi di TCCRn register (di mana n
adalah nomor timer). Sebagai contoh, kecepatan Timer1 diatur oleh bit CS1 yang
berlokasi di TCCR1B.
Untuk menghitung bagaimana untuk menghasilkan frekuensi yang
dikehendaki, lembar data yang ATMega menyediakan persamaan ini:
Persamaan ini memberitahu jam sistem berhubungan dengan frekuensi (fclk_I /
O), prescaler (N = 1, 8, 64, 256, atau 1024), ICR1 (TOP) dan output PWM
frekuensi (fOCnxPFCPWM). Untuk mendapatkan 50 Hz dengan jam sistem
frekuensi 16 MHz, akan perlu menggunakan TOP berikut (ICR1) nilai untuk
prescalers berikut:
Prescaler N = 1 maka TOP (ICR1) = 160.000
Prescaler N = 8 maka TOP (ICR1) = 20.000
Prescaler N = 64 maka TOP (ICR1) = 2500
Prescaler N = 256 maka TOP (ICR1) = 625
Prescaler N = 1024 maka TOP (ICR1) = 156,25
Catatan: tidak dapat menggunakan prescaler 1 atau 1024 untuk menghasilkan 50
Hz PWM dengan 16 MHz: Prescaler 1 tidak dapat digunakan sejak 160.000
terlalu besar untuk muat di TCR1. TCR1 adalah sebuah 16 bit register dengan
kisaran 0-65.535.
Prescaler 1024 tidak boleh digunakan karena tidak dapat menambahkan
desimal ke ICR1. Untuk prescaler 8 dan mengatur ICR1 sampai 20000 ini akan
memungkinkan untuk mengubah OCR1A antara 1000 dan 2000 untuk
mendapatkan 1-2 ms pulsa tinggi.
Perbedaan antara ICRn dan OCRxn adalah ICRn menciptakan sinyal
Gambar 2.24. Fase dan Frekuensi yang Benar Mode PWM, Waktu Diagram
Setelah menetapkan ICRn (ICR1 untuk Timer1), dan tidak akan berubah lagi.
Namun akan terus berubah OCRxn (OCR1A untuk Timer1 servo A) untuk
mengontrol posisi servo.
BAB III
PERANCANGAN ALAT
3.1 Diagram Block Rangkaian
Benda
Konveyor Utama
Gambar 3.1. Diagram Blok Perancangan Konveyor Multi Level sebagai
Alat Pemindahan Barang Berbasis ATMEGA8535
Berdasarkan gambar diatas, benda dimasukkan ke konveyor utama dibaca oleh
sensor kemudian sensor mengirim data pada mikrokontroler. kemudian benda
bergerak ke konveyor 1, konveyor 2 atau konveyor 3 sesuai data yang dikirim.
Setelah benda masuk ke konveyor 1, konveyor 2 atau konveyor 3 kemudian motor
menggerakkan konveyor menuju tempat barang masing - masing.
3.2 Rangkaian Power Supplay (PSA)
Rangkaian ini berfungsi untuk mensupplay tegangan ke seluruh rangkaian yang
ada. Rangkaian PSA yang dibuat terdiri dari dua keluaran, yaitu 5 volt dan 12
Vreg
sedangkan keluaran 12 volt digunakan untuk mensuplay tegangan ke motor servo.
Rangkaian power supplay ditunjukkan pada gambar 3.2 berikut ini :
Gambar 3.2. Rangkaian Power Supplay (PSA)
Trafo CT merupakan trafo stepdown yang berfungsi untuk menurunkan
tegangan dari 220 volt AC menjadi 12 volt AC. Kemudian 12 volt AC akan
disearahkan dengan menggunakan dua buah dioda, selanjutnya 12 volt DC akan
diratakan oleh kapasitor 2200 μF. Regulator tegangan 5 volt (LM7805CT)
digunakan agar keluaran yang dihasilkan tetap 5 volt walaupun terjadi perubahan
pada tegangan masukannya. LED hanya sebagai indikator apabila PSA
dinyalakan. Transistor PNP TIP 32 disini berfungsi untuk mensupplay arus
apabila terjadi kekurangan arus pada rangkaian, sehingga regulator tegangan
(LM7805CT) tidak akan panas ketika rangkaian butuh arus yang cukup besar.
Tegangan 12 volt DC langsung diambil dari keluaran 2 buah dioda penyearah.
3.3 Rangkaian Mikrokontroler ATMega8535
Rangkaian ini berfungsi sebagai pusat kendali dari seluruh sistem yang ada.
Komponen utama dari rangkaian ini adalah Mikrokontroler ATMega8535. Pada
sesuai dengan yang dikehendaki. Mikrokontroler ini merupakan suatu keping IC
dimana terdapat mikroprosesor dan memori program (ROM) serta memori
serbaguna (RAM), bahkan ada fasilitas ADC, PLL, EEPROM dalam satu
kemasan.
Penggunaan mikrokontroler dalam bidang kontrol sangat luas dan populer.
Ada beberapa vendor yang membuat mikrokontroler diantaranya Intel, Microchip,
Winbond, Atmel, Philips, Xemics danlain-lain. Dari beberapa vendor tersebut,
yang paling popular digunakan adalah mikrokontroler buatan Atmel. Atmel
adalah mikrokontroler produk Intel yang dilepas ke pasaran untuk pengembangan
lebih lanjut.
ATMega8535 adalah mikrokontroler CMOS 8-bit berbasis AVR dengan
konsumsi daya rendah yang dikembangkan dari arsitektur RISC. Dengan Instruksi
yang dapat dijalankan dalam satu siklus clock, ATMega8535 mempunyai
throughputs sistem 1 MIPS per MHz. ATMega8535 mempunyai 32 register yang
secara langsung terhubung dengan Arithmatic Logic Unit (ALU). Mikrokontroler
ATMega8535 juga dilengkapi dengan port serial, yang memungkinkan bagi kita
mengirimkan data dalam format serial.
Mikrokontroler ATMega8535 mempunyai 40 pin dengan catu daya
tunggal 5 volt. Ke-40 pin dalam keluarga mikrokontroler ATMega8535
Gambar 3.3. Rangkaian Mikrokontroler ATMega
3.4 Rangkaian Jembatan H
Rangkaian jembatan H ini berfungsi untuk memutar motor servo
searah/berlawanan arah dengan arah jarum jam. Mikrokontroler tidak dapat
langsung mengendalikan putaran dari motor servo, karena itu dibutuhkan driver
sebagai perantara antara mikrokontroler dan motor servo, sehingga perputaran
dari motor servo dapat dikendalikan oleh mikrokontroler. Rangkaian jembatan H
ditunjukkan pada gambar 3.4 berikut ini :
II IV
Gambar 3.4 Rangkaian jembatan H
Untuk mempermudah penjelasan, maka rangkaian di atas dikelompokkan
menjadi 4 rangkaian. Pada rangkaian di atas, jika salah input rangkaian I yang
dihubungkan ke mikrokontroler diberi logika high dan input pada rangkaian
lainnya diberi logika low, maka kedua transistor tipe NPN C945 pada rangkaian I
akan aktip. Hal ini akan membuat kolektor dari kedua transistor C945 pada
rangkaian I akan mendapat tegangan 0 volt dari ground. Kolektor dari transistor
C945 yang berada di sebelah kiri atas diumpankan ke basis dari transistor tipe
PNP TIP 127 sehingga basis dari transistor TIP 127 mendapatkan tegangan 0 volt
yang menyebabkan transistor ini aktip (transistor tipe PNP akan aktip jika
tegangan pada basis lebih kecil dari 4,34 volt). Aktipnya transistor PNP TIP 127
ini akan mengakibatkan kolektornya terhubung ke emitor sehingga kolektor
mendapatkan tegangan 15 volt dari Vcc.
Kolektor dari transistor TIP 127 dihubungkan ke kumparan, sehingga
kumparan akan mendapatkan tegangan 15 volt. Hal ini akan mengakibatkan
kumparan menimbulkan medan magnet. Medan magnet inilah yang akan menarik
motor untuk mengarah ke arah kumparan yang menimbulkan medan magnet
Sedangkan rangkaian II, III dan IV karena pada inputnya diberi logika
low, maka kumparannya tidak menimbulkan medan magnet, sehingga motor tidak
tertarik oleh kumparan-kumparan tersebut.
Demikian seterusnya untuk menggerakkan motor agar berputar maka harus
diberikan logika high secara bergantian ke masing input dari
masing-masing rangkaian.
3.5 Rangkaian Sensor LDR
Rangkaian sensor warna ini berfungsi untuk mengetahui warna dari benda yang
berada di atas sensor, Sensor warna ini dirancang dengan menggunakan 3 buah
LED yang terdiri dari 1 LED warna merah, 1 LED warna hijau, dan 1 LED warna
biru. Dimana ketiga LED ini mengelilingi sebuah LDR yang diserikan dengan
sebuah resistor. Rangkaian sensor warna ditunjukkan pada gambar 3.5 berikut
ini:
Gambar 3.5a Gambar 3.5b Gambar 3.5c
Susunan Sensor Warna Rangkaian pemancar Rangkaian Penerima
Rangkaian pemancar pada gambar 3.5b menggunakan 3 buah LED dengan
warna – warna seperti yang telah disebutkan di atas. Ke enam LED ini disusun
sesuai dengan susunan pada gambar 3.5a.
4.7k VCC
5V
LDR
ADC
Rangkaian penerima terdiri dari sebuah resistor 4K7 dan sebuah LDR
yang disusun secara seri. Keluaran dari rangkaian penerima dihubungkan ke
rangkaian ADC untuk diubah datanya menjadi data biner agar dapat dikenali oleh
mikrokontroler ATMEGA8535. Rangkaian ADC ditunjukkan pada gambar 3.6
berikut ini:
Gambar 3.6. Rangkaian ADC
Input ADC dihubungkan ke sensor warna, sehingga setiap perubahan
tegangan yang dihasilkan oleh sensor warna akan dideteksi oleh ADC.
Agar output yang dihasilkan oleh ADC bagus, maka tegangan refrensi
ADC harus benar-benar stabil, karena perubahan tegangan refrensi pada ADC
akan merubah output ADC tersebut. Oleh sebab itu pada rangkaian ADC di atas
tegangan masukan 12 volt dimasukkan ke dalam IC regulator tegangan 9 volt agar
keluarannya menjadi 9 volt, kemudian keluaran 9 volt ini dimasukkan kedalam
regulator tegangan 5 volt , sehingga keluarannya menjadi 5 volt. Tegangan 5 volt
inilah yang menjadi tegangan refrensi ADC. Dengan demikian walaupun tegangan
masukan turun setengahnya, yaitu dari 12 volt menjadi 6 volt, tegangan refrensi
Output dari ADC dihubungkan ke mikrokontroler, sehingga setiap
perubahan output ADC yang disebabkan oleh perubahan inputnya (tegangan
baterai) akan diketahui oleh mikrokontoler.
3.6 Rangkaian Sensor Kedekatan
Sensor ini berfungsi untuk mengetahui ketika ada benda (tangan) yang
mendekat ke alat. Pada alat ini sensor kendekatan yang digunakan adalah sebuah
pemancar infra merah dengan sebuah potodioda dan sebuah rangkaian penerima
sinyal infra merah. Prinsip kerjanya adalah dengan memanfaatkan pantulan dari
sinar infra merah yang dipancarkan oleh LED infra merah. LED infra merah dan
potodioda dipasang sejajar, sehingga dalam keadaan normal, tidak ada benda yang
mendekat, maka sinar infra merah akan terus ke depan (tidak ada yang
dipantulkan). Namun ketika ada benda yang mendekat, kemudian sinar infra
merah mengenai benda tersebut, maka sebagian sinar akan dipantulkan dan
pantulannya akan mengenai potodioda. Potodioda yang terkena pantulan sinar
infra merah akan mengalami perubahan hambatan, sehingga tegangan yang
dihasilkan juga akan berubah. Perubahan tegangan inilah yang kemudian diolah
oleh rangkaian pengolah sinyal agar menjadi sinyal digital, kemudian dikirimkan
ke mikrokontroler. Rangkaian pemancar infra merah tampak seperti gambar di
bawah ini:
Gambar 3.7. Rangkaian Pemancar Infra Merah
Pada rangkaian di atas digunakan sebuah LED infra merah yang diserikan
dengan sebuah resistor 18 ohm. Resistor ini berfungsi untuk membatasi arus yang VCC
5V
masuk ke LED infra merah agar LED infra merah tidak rusak. Resistor yang
digunakan adalah 18 ohm sehingga arus yang mengalir pada LED infra merah
adalah sebesar:
V = I.R I = V = 5 = 0,277 A atau 277 mA R 18
Dengan besarnya arus yang mengalir ke LED infra merah, maka intensitas
pancaran infra merah akan semakin kuat, yang menyebabkan jarak pancarannya
akan semakin jauh.
Pancaran dari sinar infra merah akan diterima oleh potodioda, kemudian
akan diolah oleh rangkaian penerima agar menghasilkan sinyal tertentu, dimana
jika potodioda menerima pancaran sinar infra merah maka output dari rangkaian
penerima ini akan mengeluarkan logika low (0), namun jika potodioda tidak
menerima pancaran sinar infra merah, maka output dari rangkaian penerima akan
mengeluarkan logika high (1). Rangkaian penerima infra merah seperti gambar di
bawah ini:
Gambar 3.8. Rangkaian Penerima Sinar Infra Merah
Potodioda memiliki hambatan sekitar 15 s/d 20 Mohm jika tidak terkena
Kohm jika terkena sinar infra merah tergantung dari besarnya intensitas yang
mengenainya. Semakin besar intensitasnya, maka hambatannya semakin kecil.
Pada rangkaian di atas, output dari potodioda diumpankan ke basis dari
transistor tipa NPN C828, ini berarti untuk membuat transistor tersebut aktip
maka tegangan yang keluar dari potodioda harus lebih besar dari 0,7 volt.
Aktipnya transistor C828 akan menyebabkan kolektornya terhubung ke
emitor, sehingga kolektor mandapat tegangan 0 volt dari ground, tegangan ini
diumpankan ke basis dari transistor ke-2 tipe PNP A733, sehingga transistor ini
juga aktip. Seterusnya aktipnya transistor A733 akan menyebabkan kolektornya
terhubung ke emitor, sehingga kolektor mandapat tegangan 5 volt dari Vcc,
tegangan ini diumpankan ke basis dari transistor ke-3 tipe NPN C945, sehingga
transistor ini juga aktip.
Kolektor dari transistor C945 dihubungkan mikrokontroler ATMega8535
sehingga jika transistor ini aktip, maka kolektor akan mendapatkan tegangan 0
volt dari ground. Tegangan 0 volt inilah yang merupakan sinyal low (0) yang
diumpankan ke mikrokontroler ATMega8535, sehingga mikrokontroler dapat
mengetahui bahwa sensor ini mengirimkan sinyal, yang berarti bahwa ada benda
yang berada di dekat sensor sehingga pantulan sinar infra merah mengenai sensor.
Namun ketika tidak ada benda di dekat sensor, maka pantulan sinar infra
merah tidak ada yang mengenai potodioda, sehingga sensor akan mengirimkan
sinyal high ke mikrokontroler.
Transistor ke-4 tipe PNP A733 berfungsi untuk menyalakan LED sebagai
indikator bahwa sensor ini menerima pantulan sinar infra merah dari pemancar.
LED ini akan menyala jika sensor menerima sinar infra merah, dan akan mati jika
sensor tidak menerima sinar infra merah.
3.7. Rangkaian Driver Motor DC
Pada saat sensor membaca sinyal output dari benda/objek berwarna maka
gunakan pengait yang mengatur saat benda berada tepat didepan sensor. Pengait
tersebut digerakkan dengan menggunakan sebuah motor dc. Motor dc tidak bisa
langsung dikendalikan oleh mikrokontroler. Oleh karena itu dibutuhkan sebuah
driver yang menghubungkan dengan mikrokontroler. Driver yang digunakan
adalah sebuah rangkaian driver motor dc. Rangkaian driver motor dc, ditunjukkan
pada gambar dibawah ini :
Gambar 3.9. Rangkain Driver Motor DC
Pada rangkaian diatas, jika p2.2 diset high yang berarti p2.2 mendapat
tegangan 5 volt, maka kedua kapasitor tipe NPN C945 yang disebelah kiri akan
aktif. Hal ini akan membuat kolektor dari kedua transistor C945 itu akan
mendapat tegangan 0 volt dari ground.
Kolektor dari transistor C945 yang berada disebelah kiri atas diumpankan
kebasis dari transistor tipe PNP TIP 127 sehingga basis dari transistor TIP 127
mendapatkan tegangan 0 volt yang menyebabkan transistor ini aktif (transistor
tipe PNP akan aktif jika tegangan pada basis lebih kecil dari 4,34 volt). Aktifnya
transistor PNP TIP 127 ini akan mengakibatkan kolektornya terhubung ke emitor
sehingga kolektor mendapatkan tegangan 12 volt dari Vcc.
Sedangkan kolektor dari transistor C945 yang berada disebelah kiri bawah di
umpankan ke basis dari transistor tipe NPN TIP 122 sehingga basis dari transistor
TIP 122 mendapatkan tengangan 0 volt yang menyebabkan transistor ini tidak
aktif (transistor tipe NPN akan aktif jika tegangan pada basis lebih besar dari 0,7
ke emitor, sehingga kolektor tidak mendapatkan tegangan 0 volt dari ground.
Karena kolektor TIP 122 dihubungkan dengan kolektor TIP 127 yang
mendapatkan tegangan 5 volt dari Vcc, maka kolektor TIP 122 juga mendapatkan
tegangan yang sama. Hal ini menyebabkan kaki motor sebelah kiri mendapatkan
tegangan 5 volt (polaritas positif).
Agar motor dapat berputar ke satu arah maka kaki sebelah kanan harus
mendapatkan tegangan 0 volt (polaritas negatif). Hal ini diperoleh dengan
memberikan logika low (0) pada P2.3 mikrokontroler ATMega8535.
Pada rangkaian di atas, jika P2.3 diset low yang berarti P2.3 mendapat
tegangan 0 volt, maka kedua transistor jenis NPN C945 yang disebelah kanan
tidak akan aktif. Hal ini membuat kolektor dari kedua transistor C945 akan
mendapat tegangan 5 volt dari Vcc.
Kolektor dari transistor C945 yang berada di sebelah kanan akan di
umpankan ke basis dari transistor tipe PNP TIP 127 sehingga basis dari transistor
TIP 127 mendapatkan tegangan 5 volt yang menyebabkan transistor ini tidak
aktif. Karena transistor PNP TIP 127 tidak aktif maka kolektornya tidak
terhubung ke emitor sehingga kolektor tidak mendapatkan tegangan 12 volt dari
Vcc, tetapi mendapatkan teganganyang berasal dari transistor TIP 122 yang
berada di bawahnya.
Sedangkan kolektor dari transistor C945 yan berada disebelah kanan bawah
diumpankan ke basis dari transistor jenis NPN TIP 122 sehingga basis dari
transistor TIP 122 mendapatkan tegangan 5 volt yang menyebabkan transistor ini
aktif. Karena transistor TIP 122 ini menjadi aktif, menyebabkan kolektornya
terhubung ke emitor, sehingga kolektor mendapatkan tegangan 0 volt dari ground.
Karena kolektor TIP 122 yang mendapatkan tegangan 0 volt dari ground
dihubungkan dengan kolektor TIP 127, maka kolektor dari TIP 127 juga
mendapatkan tegangan yang sama. Hal ini akan menyebabkan motor akan
berputar ke satu arah tertentu. Sedangkan untuk memutar motor kearah
sebaliknya, maka logika yang diberikan ke P2.2 adalah low (0) dan logika yang di
3.8. Rangkaian Motor Servo
Motor servo jika terhubung pada PortC.0 pada rangkaian
mikrokontroler. Motor servo mempunyai tiga masukan yaitu input, Vcc. Ground.
Jika mikrokontroller di berikan logika 1 ( high) pada salah satu inputan motor
servo maka motor servo tidak berkerja sedangkan jika mikrokontroler diberikan
logika 0 (low) maka servo berkerja sesuai fungsi yang dibutuhkan oleh motor
servo seperti yang terlihat pada Gambar 3.10.
Gambar 3.10. Rangkaian Motor Servo
Paralaks servo standar yang sangat ideal untuk robotika dan gerakan dasar
proyek. Motor Servo ini akan memungkinkan suatu gerakan kisaran 0-180 derajat.
Output Servo Parallax poros gear standar konfigurasi.
Servo motor menggunakan sinyal PWM untuk mengendalikan motor.
Motor servo akan bekerja dengan baik pada 50 Hz dari frekuensi PWM, ini berarti
sinyal PWM memiliki periode 20ms. Sirkuit elektronik di dalam motor servo akan
respons terhadap sinyal PWM width yang 0.7ms untuk 1ms PWM lebar akan
membuat motor servo untuk memutar searah jarum jam (CW), maka untuk 2ms
PWM 1.7ms lebar akan membuat motor servo untuk memutar berlawanan arah
jarum jam ( CCW). Untuk standar PWM servo yang lebar 1.5ms akan memutar
motor servo pusatnya.
Lebar PWM yang tepat tergantung pada jenis motor servo dan Parallax
Servo yang digunakan masing – masing 1ms dan 2ms. Paralaks servo motor yang