RANCANG BANGUN PROTOTIPE PENGENDALI KECEPATAN MOTOR INDUKSI 3 FASA DENGAN PENGATURAN TEGANGAN
BERBASIS MIKROKONTROLER ARDUINO DAN ANDROID SMARTPHONE
Oleh
REJANI ERWANDA
Pada jaman sekarang ini, teknologi semakin berkembang pesat. Hal tersebut dapat dilihat dari otomasi pengoperasian berbagai equipment menggunakan kontroler sehingga lebih memudahkan penggunanya dalam mengoperasikan equipment tersebut. Salah satu equipment elektrik yang sering digunakan dalam kehidupan sehari hari yaitu motor induksi. Terutama di bidang industri seperti pada crane, pengoperasian motor induksi 3 fasa umumnya masih menggunakan metode manual. Hal tersebut mengharuskan operator untuk mengoperasikan motor tersebut melalui remote control kabel dengan cara mengikuti arah gerak motor dan jarak yang dekat dari motor sehingga cukup membahayakan operator.
Arduino merupakan suatu mikrokontroler yang dapat diprogram untuk mengatur tegangan, kecepatan dan kinerja motor dengan menerapkan instruksi yang sudah ditanamkan padanya. Arduino juga dapat diprogram untuk berinteraksi dengan smartphone android melalui fasilitas perangkat bluetooth yang telah terkoneksi dengannya. Dengan memanfaatkan hal tersebut, maka timbul suatu pemikiran untuk dapat menciptakan suatu prototipe alat pengendali kecepatan motor induksi 3 fasa menggunakan smartphone android. Dengan demikian operator akan lebih mudah dan lebih aman dalam mengendalikan motor induksi 3 fasa dari jarak jauh menggunakan smartphone android. Pengendalian kecepatan motor induksi 3 fasa dilakukan dengan menggunakan prinsip phase
angle ac chopper dengan memanfaatkan solid state relay MOC 3020 sebagai gate
driver triac dan rangkaian zero crossing detector untuk mendeteksi titik
persilangan nol sebagai acuan waktu tunda penyalaan triac.
Dari hasil dan pengamatan didapatkan kecepatan motor mengalami kenaikan pada nilai duty cycle 40% dengan nilai 875 Rpm untuk kondisi tanpa beban dan 720 Rpm pada beban 0,65Kg. Hingga pada nilai duty cycle 100% kecepatan motor mengalami kenaikan mencapai kecepatan nominal 1380 Rpm. Sedangkan pengereman plugging dilakukan dalam waktu kurang dari 3 detik.
3 PHASE INDUCTION MOTOR VOLTAGE REGULATED SPEED CONTROLLING DESIGN BASED ON ARDUINO AND ANDROID
SMARTPHONE
BY
REJANI ERWANDA
Nowadays technologies are increasing really fast. It can be concluded from automation of various equipment operations using control in order to ease its user . There are various electric devices that are being used in nowadays daily needs such as 3 phase induction motor. Generally on industry sector, It is usually manually operated in such big cranes that makes the operator should operate it nearby the device. This of course increases the risk of accident for the operator.
Arduino is a microcontroller that can be programmed to control voltage, and speed of the motor by implying instructions that had been given to it. Arduino can also interacts with android smartphone using bluetooth device that connected with it. Using this idea, the operator possibly operate the motor from further distance using android device.3 phase induction motor speed controlling is done by the principle of phase angle ac chopper which use solid state relay MOC 3020 as gate driver triac and zero crossing detector as the reference delay timer for the triac.
the result shows that by 40% duty cycle, the motor speed reaches to 875 rpm (no load condition) and 720 rpm (loaded condition, equals 0,65 kg). The speed of the motor is constanly increasing until 1380 Rpm in 100% duty cycle. The plugging breaking has done less than 3 seconds .
BERBASIS MIKROKONTROLER ARDUINO DAN ANDROID SMARTPHONE
(Skripsi)
Oleh
REJANIERWANDA
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK UNIVERSITAS LAMPUNG
RANCANG BANGUN PROTOTIPE PENGENDALI KECEPATAN MOTOR INDUKSI 3 FASA DENGAN PENGATURAN TEGANGAN
BERBASIS MIKROKONTROLER ARDUINO DAN ANDROID SMARTPHONE
Oleh
REJANI ERWANDA
Pada jaman sekarang ini, teknologi semakin berkembang pesat. Hal tersebut dapat dilihat dari otomasi pengoperasian berbagai equipment menggunakan kontroler sehingga lebih memudahkan penggunanya dalam mengoperasikan equipment tersebut. Salah satu equipment elektrik yang sering digunakan dalam kehidupan sehari hari yaitu motor induksi. Terutama di bidang industri seperti pada crane, pengoperasian motor induksi 3 fasa umumnya masih menggunakan metode manual. Hal tersebut mengharuskan operator untuk mengoperasikan motor tersebut melalui remote control kabel dengan cara mengikuti arah gerak motor dan jarak yang dekat dari motor sehingga cukup membahayakan operator.
Arduino merupakan suatu mikrokontroler yang dapat diprogram untuk mengatur tegangan, kecepatan dan kinerja motor dengan menerapkan instruksi yang sudah ditanamkan padanya. Arduino juga dapat diprogram untuk berinteraksi dengan smartphone android melalui fasilitas perangkat bluetooth yang telah terkoneksi dengannya. Dengan memanfaatkan hal tersebut, maka timbul suatu pemikiran untuk dapat menciptakan suatu prototipe alat pengendali kecepatan motor induksi 3 fasa menggunakan smartphone android. Dengan demikian operator akan lebih mudah dan lebih aman dalam mengendalikan motor induksi 3 fasa dari jarak jauh menggunakan smartphone android. Pengendalian kecepatan motor induksi 3 fasa dilakukan dengan menggunakan prinsip phase
angle ac chopper dengan memanfaatkan solid state relay MOC 3020 sebagai gate
driver triac dan rangkaian zero crossing detector untuk mendeteksi titik
persilangan nol sebagai acuan waktu tunda penyalaan triac.
Dari hasil dan pengamatan didapatkan kecepatan motor mengalami kenaikan pada nilai duty cycle 40% dengan nilai 875 Rpm untuk kondisi tanpa beban dan 720 Rpm pada beban 0,65Kg. Hingga pada nilai duty cycle 100% kecepatan motor mengalami kenaikan mencapai kecepatan nominal 1380 Rpm. Sedangkan pengereman plugging dilakukan dalam waktu kurang dari 3 detik.
3 PHASE INDUCTION MOTOR VOLTAGE REGULATED SPEED CONTROLLING DESIGN BASED ON ARDUINO AND ANDROID
SMARTPHONE
BY
REJANI ERWANDA
Nowadays technologies are increasing really fast. It can be concluded from automation of various equipment operations using control in order to ease its user . There are various electric devices that are being used in nowadays daily needs such as 3 phase induction motor. Generally on industry sector, It is usually manually operated in such big cranes that makes the operator should operate it nearby the device. This of course increases the risk of accident for the operator.
Arduino is a microcontroller that can be programmed to control voltage, and speed of the motor by implying instructions that had been given to it. Arduino can also interacts with android smartphone using bluetooth device that connected with it. Using this idea, the operator possibly operate the motor from further distance using android device.3 phase induction motor speed controlling is done by the principle of phase angle ac chopper which use solid state relay MOC 3020 as gate driver triac and zero crossing detector as the reference delay timer for the triac.
the result shows that by 40% duty cycle, the motor speed reaches to 875 rpm (no load condition) and 720 rpm (loaded condition, equals 0,65 kg). The speed of the motor is constanly increasing until 1380 Rpm in 100% duty cycle. The plugging breaking has done less than 3 seconds .
SMARTPHONE
Oleh
REJANI ERWANDA
Skripsi
Sebagai Salah Satu Syarat untuk Mencapai Gelar SARJANA TEKNIK
Pada
Jurusan Teknik Elektro
Fakultas Teknik Universitas Lampung
FAKULTAS TEKNIK
UNIVERSITAS LAMPUNG
Penulis dilahirkan di Lampung Tengah, pada tanggal 17 Juni 1993. Penulis merupakan anak Kedua dari tiga bersaudara dari pasangan Ayah Ersofyan dan Ibu Yuliyanti.
Riwayat pendidikan formal penulis dimulai di TK Satya Dharma Sudjana, Lampung Tengah dari tahun 1999 - 2000. Kemudian penulis melanjutkan pendidikan dasar di SDN 1 Gunung Madu, Lampung Tengah dari tahun 2000 - 2005, SMP Satya Dharma Sudjana Lampung Tengah dari tahun 2005 - 2008, dan SMAN 3 Bandar Lampung pada tahun 2008 hingga tahun 2011.
Karya ini kupersembahkan untuk
Ayahanda Tercinta dan Ibunda Tercinta
Ersofyan dan Yuliyanti
Kakak dan Adikku Tersayang
Nofin Erdiantama
Nova Tri Rahma Erwanti
MOTTO
“ Setiap Manusia Adalah Individu Yang Unik Dengan Paradigma Pemikiran,
Kreatifitas, dan Kepercayaannya Masing Masing”
( Rejani Erwanda, S.T.)
“ Mersudi Patitising Tindak Pusakane Titising Hening “
Mencari Sampai Mendapat Kebenaran Dalam Keheningan
( Merpati Putih)
“Dang Ngimpei Idup Bangek Lamun Niku Mak Agow Usaha jamo berdoa“
Jangan Bermimpi Hidup Enak Kalau Kamu Tidak Mau Berusaha Dan Berdoa
( Rejani Erwanda, S.T.)
“ Every single piece of life was made from problem and lesson.And every person
had their ways to face it “
SANWACANA
Segala puji bagi Allah SWT atas nikmat kesehatan dan kesempatan yang diberikan kepada penulis sehingga penulis dapat menyelesaikan penelitian Tugas Akhir ini. Sholawat serta salam selalu penulis haturkan kepada Nabi Muhammad SAW sebagai suri teladan bagi umat manusia. Tugas Akhir dengan judul
“Rancang Bangun Prototipe Pengendali Kecepatan Motor Induksi 3 Fasa Dengan
Pengaturan Tegangan Berbasis Mikrokontroler Arduino dan Android
Smartphone” ini merupakan salah satu syarat untuk memperoleh gelar Sarjana
Teknik pada Jurusan Teknik Elektro, Fakultas Teknik, Universitas Lampung.
Pada kesempatan ini, penulis mengucapkan terima kasih kepada :
1. Bapak Prof. Dr. Ir. Hasriadi Mat Akin, M.P. selaku Rektor Universitas Lampung.
2. Bapak Prof. Suharno, M.Sc., Ph.D. selaku Dekan Fakultas Teknik, Universitas Lampung.
4. Bapak Ir. Noer Soedjarwanto, M.T. selaku Pembimbing Utama sekaligus Pembimbing Akademik penulis, yang selalu memberikan bimbingan, arahan, dan pandangan hidup kepada penulis di setiap kesempatan dengan baik dan ramah.
5. Bapak Osea Zebua, S.T., M.T. selaku Pembimbing Pendamping yang telah memberikan bimbingan dan arahan kepada penulis dengan baik dan ramah. 6. Bapak Ir. Abdul Haris, M.T. selaku Dosen Penguji yang telah memberikan
kritik yang membangun serta saran yang sangat baik kepada penulis dalam mengerjakan skripsi ini.
7. Segenap Dosen di Jurusan Teknik Elektro yang telah memberikan ilmu yang bermanfaat, wawasan, dan pengalaman yang sangat berarti bagi penulis. 8. Segenap Staff di Jurusan Teknik Elektro dan Fakultas Teknik yang telah
membantu penulis baik dalam hal administrasi dan hal – hal lainnya terutama Mbak Dian Rustiningsih.
9. Ayahanda Ersofyan dan Ibunda Yuliyanti Tercinta, serta abang Nofin Erdiantama dan adik Nova Tri Rahma Erwanti tersayang. Terima kasih atas kasih sayang, dukungan, serta doa yang selalu diberikan kepada penulis. 10. Teknisi Lab Pak Sugiyanto Segenap Asisten Lab KEE 2011 dan rekan rekan
tim Pak Noer Project (Adit, Deny, Frian, Apriwan, Habib, Richard).
11. Segenap Asisten Senior 2010 Lab KEE (Kak Nanang, Kak Maulana, Kak Melzi, Kak Reza, Kak Nuril, Kak Jaya, Kak Radi, Kak Rahmat, Mbak Devi) 12. Segenap Asisten Junior 2012 Lab KEE ( Guntur, Aji, Rio, Yayan, Ifan, Panji,
13. Teman – Teman Elevengineer Adit Riski, Adit Tanto, Adit Pratama, Agi, Alex, Alin, Anang, Andi, Andreas, Annida, Apriwan, (Alm) Arief, Arrosyiq, Choi, Darma, Deden, Denny, Dirya, Iyon, Edi, Eliza, Fadil, Fanny, Faris, Fikri, Havif, Pras, Najib, Habib, Rei, Rani, Gata, Aji, Nur, Vina, Yunita, Ryan, Grienda, Frian, Hajar, Reza, Restu, Randi, Abidin, Bastian, Oka, Farid, Gusmau, Sigit,Yoga, Yazir, Imam, Made, Richard, Petrus, Frisky, Rina. 12. Rekan – rekan Himatro Unila, serta Kakak - Kakak dan Adik – Adik Tingkat
di Jurusan Teknik Elektro.
13. Sahabat sahabat Tercinta Almamater SMAN3 BALAM ( Zakky, Adam, Algi, Heru, Mutia, Sherly, Oka, Uki, Rama).
14. Rekan Rekan Alumni LBI 2014/ 2015 ( Olan, Uul, Widya, Saputri, Haysi, Sophia dll).
15. Semua Pihak yang membantu penulis menyelesaikan skripsi ini.
Penulis menyadari bahwa masih banyak kekurangan dalam penulisan skripsi ini. Penulis mengharapkan kritik dan saran konstruktif dari semua pihak demi kemajuan bersama. Penulis berharap skripsi ini dapat bermanfaat bagi kita semua.
Bandar Lampung, 20 April 2016
DAFTAR ISI
DAFTAR ISI ... xv
DAFTAR GAMBAR ... xviii
DAFTAR TABEL ... xxii
I. PENDAHULUAN ... 1
1.1 Latar Belakang ... 1
1.2 Tujuan Penelitian ... 2
1.3 Manfaat Penelitian ... 3
1.4 Rumusan Masalah... 3
1.5 Batasan Masalah ... 4
1.6 Hipotesis... 4
1.7 Sistematika Penulisan ... 4
II. TINJAUAN PUSTAKA ... 6
2.1 Motor Induksi ... 6
2.1.1 Konsep Dasar Kopel dan Kontrol Kecepatan Motor Induksi 3 fasa[2] 8 2.1.2 Pengereman Motor Induksi[1] ... 11
2.1.3 Pengereman Plugging[6] ... 13
2.2 Relai Solid State[1] ... 15
2.3 Pemrograman Smartphone Android ... 19
2.3.2 Paket Bluetooth Android[8] ... 22
2.3.3 Pemrograman AppInventor[4] ... 24
2.4 Mikrokontroller Arduino MEGA2560[5]... 28
III. METODE PENELITIAN ... 33
3.1 Waktu dan Tempat Penelitian ... 33
3.2 Alat dan Bahan ... 33
3.3 Prosedur Penelitian ... 34
1. Studi literatur ... 35
2. Perancangan Alat ... 35
3. Pengujian alat ... 36
3.4 Realisasi Pembuatan Alat ... 39
3.5 Interfacing Android Smartphone ... 41
3.6 Perancangan Mikrokontroler Arduino ... 41
3.7 Diagram Alir Penelitian ... 44
IV. PEMBAHASAN ... 46
4.1 Hasil Perancangan Alat ... 46
4.1.1 Aplikasi Motor controller ... 46
4.1.2 Perangkat Bluetooth ... 48
4.1.3 Mikrokontroler Arduino... 50
4.1.4 Modul Power Supply ... 53
4.1.5 Modul Gate driver Triac ... 54
4.1.6 Modul Zerocrossing detector ... 57
4.1.7 Modul Pengereman Plugging ... 59
4.2 Motor Induksi 3 Fasa ... 61
4.3 Analisa Data Hasil Pengujian ... 62
4.3.2 Pengujian Perangkat Bluetooth ... 66
4.3.3 Pengujian Komunikasi UART ... 69
4.3.4 Pengujian Komunikasi I2C/ TWI ... 73
4.3.5 Pengujian Gelombang PWM ... 77
4.3.6 Pengujian Zerocrossing detector ... 83
4.3.7 Pengujian Driver Triac ... 84
4.3.8 Pengujian Modul Plugging dan Tahanan Tangga ... 91
4.3.9 Pengujian Keseluruhan ... 92
a. Pengujian tanpa beban/ beban nol ... 93
b. Beban A (0, 15 Kg) ... 94
c. Beban B (0,3 Kg) ... 95
d. Beban C (0,45 Kg) ... 96
e. Beban D (0,57 Kg) ... 97
f. Beban E (0,65 Kg)... 98
g. Pengujian Pengereman Plugging ... 99
V. KESIMPULAN DAN SARAN ... 101
5.1 Kesimpulan ... 101
5.2 Saran ... 102
DAFTAR PUSTAKA ... 103
DAFTAR GAMBAR
Gambar 2. 1Rangkaian Ekuivalen Motor Induksi[1] ... 8
Gambar 2. 2Karakteristik pengaturan tegangan terhadap torsi[2] ... 11
Gambar 2. 3 Kurva Torsi - Kecepatan Motor Induksi[6] ... 13
Gambar 2. 4 Induction Motor Plugging Wiring ... 14
Gambar 2. 5 Kurva Pengereman Plugging Dalam Kondisi Tanpa Beban ... 14
Gambar 2. 6 Kurva Pengereman Plugging Dalam Kondisi Beban Penuh ... 15
Gambar 2. 7 skematik solid state relay[1] ... 15
Gambar 2. 8 sinyal outputzerocrossing detector circuit dan ssr beban resistif[1] ... 17
Gambar 2. 9 rangkaian snubber komponen switching[1] ... 18
Gambar 2. 10 Siklus activity pemrograman android ... 20
Gambar 2. 11 Bluetooth Permission untuk mengaktifkan ... 24
Gambar 2. 12 design view Appinventor ... 25
Gambar 2. 13 Contoh Code Block Appinventor ... 26
Gambar 2. 14 Arduino MEGA2560[5] ... 28
Gambar 2. 15 Arduino Mega2560 PinMapping[5] ... 30
Gambar3. 1 Blok Diagram Sistem Alat Pengendali Motor Induksi 3 fasa ... 40
Gambar3. 2 Diagram alir interfacing aplikasi smartphone android ... 41
Gambar3. 3 Diagram alir mikrokontroler arduino ... 44
Gambar 4. 1 Tampilan Aplikasi Motor controller ... 47
Gambar 4. 2 Tampilan fisik Modul bluetooth HC-06 ... 48
Gambar 4. 3 3 buah mikrokontroler Arduino ... 50
Gambar 4. 4 Rangkaian Power Supply ... 53
Gambar 4. 5 Realisasi Rangkaian Power Supply ... 54
Gambar 4. 6 Rangkaian Gatedriver Triac ... 55
Gambar 4. 7 Hasil Realisasi rangkaian Gatedriver Triac ... 56
Gambar 4. 8 Rangkaian Zerocrossing detector ... 57
Gambar 4. 9 Hasil Realisasi Rangkaian Zerocrossing detector ... 58
Gambar 4. 10 rangkaian pengereman plugging ... 59
Gambar 4. 11 Hasil Realisasi Rangkaian Pengereman Plugging ... 60
Gambar 4. 12 Motor Induksi 3 Fasa ... 61
Gambar 4. 13 Tampilan Screen 1 Aplikasi Motor controller ... 62
Gambar 4. 14 Tampilan Screen 2 Aplikasi Motor controller ... 63
Gambar 4. 15 List alamat dan nama modul bluetoothclient yang akan dikoneksikan ... 65
Gambar 4. 16 Tampilan Screen 3 Aplikasi Motor controller. ... 65
Gambar 4. 17 Hasil Pengujian Komunikasi UART Dengan Instruksi 10% ... 70
Gambar 4. 18 Hasil Pengujian Komunikasi UART Dengan Instruksi 20% ... 71
Gambar 4. 19 Hasil Pengujian Komunikasi UART Dengan Instruksi 30% ... 71
Gambar 4. 20 Hasil Pengujian Komunikasi UART Dengan Instruksi 40% ... 71
Gambar 4. 21 Hasil Pengujian Komunikasi UART Dengan Instruksi 50% ... 71
Gambar 4. 22 Hasil Pengujian Komunikasi UART Dengan Instruksi 60% ... 72
Gambar 4. 23 Hasil Pengujian Komunikasi UART Dengan Instruksi 70% ... 72
Gambar 4. 24 Hasil Pengujian Komunikasi UART Dengan Instruksi 80% ... 72
Gambar 4. 26 Hasil Pengujian Komunikasi UART Dengan Instruksi 100% ... 73
Gambar 4. 27 Hasil Pengujian Komunikasi UART Dengan Instruksi STOP ... 73
Gambar 4. 28 Bus Komunikasi I2C ... 75
Gambar 4. 29 Indicator LED Komunikasi I2C ... 77
Gambar 4. 30 Grafik Hasil Pengukuran Vout PWM Terhadap Nilai Duty cycle ... 79
Gambar 4. 31 Hasil pengujian Gelombang PWM Duty cycle 10% ... 80
Gambar 4. 32 Hasil Pengujian Gelombang PWM Duty cycle 20% ... 80
Gambar 4. 33 Hasil Pengujian Gelombang PWM Duty cycle 30% ... 80
Gambar 4. 34 Hasil Pengujian Gelombang PWM Duty cycle 40% ... 81
Gambar 4. 35 Hasil Pengujian Gelombang PWM Duty cycle 50% ... 81
Gambar 4. 36 Hasil Pengujian Gelombang PWM Duty cycle 60% ... 81
Gambar 4. 37 Hasil Pengujian Gelombang PWM Duty cycle 70% ... 82
Gambar 4. 38 Hasil Pengujian Gelombang PWM Duty cycle 80% ... 82
Gambar 4. 39 Hasil Pengujian Gelombang PWM Duty cycle 90% ... 82
Gambar 4. 40 Hasil Pengujian Gelombang PWM Duty cycle 100% ... 83
Gambar 4. 41 Gelombang Sinyal OutputZerocrossing detector ... 84
Gambar 4. 42 Gelombang OutputDriver Triac Duty cycle 10 % ... 86
Gambar 4. 43 Gelombang OutputDriver Triac Duty cycle 20 % ... 86
Gambar 4. 44 Gelombang OutputDriver Triac Duty cycle 30 % ... 87
Gambar 4. 45 Gelombang OutputDriver Triac Duty cycle 40 % ... 87
Gambar 4. 46 Gelombang OutputDriver Triac Duty cycle 50 % ... 87
Gambar 4. 47 Gelombang OutputDriver Triac Duty cycle 60 % ... 88
Gambar 4. 48 Gelombang OutputDriver Triac Duty cycle 70 % ... 88
Gambar 4. 49 Gelombang OutputDriver Triac Duty cycle 80 % ... 88
Gambar 4. 50 Gelombang OutputDriver Triac Duty cycle 90 % ... 89
Gambar 4. 52 Grafik Hubungan Vout Gatedriver Terhadap Nilai Duty cycle ... 90
DAFTAR TABEL
Tabel 2. 1 Karakteristik Arduino MEGA2560 ... 29
Tabel 4. 1 Daftar Karakter Huruf Berdasarkan Instruksi yang dijalankan ... 49
Tabel 4. 2 Nilai InputRegister OCR Berdasarkan Nilai Duty cycle ... 52
Tabel 4. 3 Hasil pengujian jarak jangkauan koneksi modul bluetooth ... 67
Tabel 4. 4 Hasil pengujian jarak jangkauan koneksi modul bluetooth ... 68
Tabel 4. 5 Hasil Pengujian Komunikasi I2C ... 76
Tabel 4. 6 Hasil Pengukuran Tegangan Output Gelombang PWM ... 78
Tabel 4. 7 Sudut Penyalaan Triac ... 85
Tabel 4. 8 Hasil Pengukuran Tegangan Output Terhadap Nilai Duty cycle ... 90
Tabel 4. 9 Hasil Pengujian Relay Pengereman ... 91
Tabel 4. 10 Beban Motor Induksi dan Variasi Beratnya ... 93
Tabel 4. 11 Hasil Pengujian Prototipe Tanpa Beban ... 93
Tabel 4. 12 Hasil Pengujian Prototipe Dengan Beban 0,15Kg ... 94
Tabel 4. 13 Hasil Pengujian Prototipe dengan Beban 0,3 Kg ... 95
Tabel 4. 14 Hasil Pengujian Prototipe dengan Beban 0,45 Kg ... 96
Tabel 4. 15 Hasil Pengujian Prototipe dengan Beban 0,57 Kg ... 97
Tabel 4. 16 Hasil Pengujian Prototipe dengan Beban 0,65 Kg ... 98
I.
PENDAHULUAN
1.1Latar Belakang
Pada jaman sekarang ini, kemajuan teknologi semakin berkembang dengan pesat. Hal tersebut dapat dilihat dari munculnya otomasi pengoperasian berbagai
equipment dengan menggunakan kontroler sehingga lebih memudahkan operator
dalam mengoperasikan equipment tersebut. Kontroler yang digunakan pun mengalami perkembangan baik dari segi bentuk, ukuran, dan fasilitas yang diberikan.
Bukan hanya pada kontroler elektronika, perkembangan teknologi juga merambah kedunia telekomunikasi. Berbagai macam handphone bermunculan dengan fitur menarik dan sistem operasinya masing masing seperti android, ios, windows, dll. Pada umumnya, smartphone android yang banyak beredar telah dilengkapi oleh fasilitas yang sudah terintegrasi dengan perangkat bluetooth didalamnya.
Khususnya didunia industri, pemakaian motor induksi lebih banyak digunakan karena karakteristik konstruksinya yang kuat dan perawatannya yang lebih mudah. Salah satu contohnya diaplikasikan pada crane yang digunakan untuk mengangkat beban berat. Namun dalam pangaplikasiannya operator masih harus mengontrol crane tersebut melalui sebuah remote control kabel sehingga operator perlu mengikuti arah gerak dari crane tersebut. Hal ini cukup berbahaya mengingat jarak operator dengan crane yang membawa beban berat cukup dekat.
Dari beberapa kondisi diatas timbul suatu pemikiran untuk merancang bangun prototipe alat pengendali kecepatan motor induksi dengan pengaturan tegangan menggunakan android smartphone dengan cara mengirimkan instruksi berupa data melalui media bluetooth dengan kontroler yang terhubung dengan motor tersebut. Dengan demikian hal tersebut akan lebih memudahkan operator dalam mengoperasikan crane dengan smartphone android dalam jangkauan jarak yg lebih luas secara wireless (tanpa kabel).
1.2Tujuan Penelitian
Adapun penelitian ini memiliki beberapa tujuan antara lain yaitu:
1. Merancang prototipe alat kendali kecepatan dan pengereman motor induksi 3 fasa menggunakan kontroler tegangan.
2. Membangun aplikasi smartphone berbasis sistem operasi android yang digunakan sebagai alat pengendali kecepatan motor .
1.3Manfaat Penelitian
Adapun manfaat yang didapat dari penelitian ini yaitu:
1. Dapat menghasilkan suatu prototipe kontroler motor induksi yang bersifat interaktif dengan memanfaatkan mikrokontroler arduino tipe mega 2560 2. Dapat mengetahui hubungan antara besaran tegangan sumber terhadap
kecepatan motor yang dihasilkan dengan mengatur sudut penyalaannya. 3. Dapat memanfaatkan smartphone android untuk mengendalikan
mikrokontroler secara wireless dalam batasan jarak tertentu.
4. Memudahkan operator crane dalam mengoperasikan dan mengontrol kecepatan motor induksi secara otomatis secara wireless dalam batasan jarak tertentu.
1.4Rumusan Masalah
Adapun rumusan masalah yang akan dibahas dalam penelitian ini antara lain: 1. Bagaimana mengontrol putaran motor induksi dengan mengatur tegangan
sumber dan sudut penyalaannya menggunakan mikrokontroler.
2. Bagaimana merancang modul pengereman motor dengan menggunakan metode plugging braking.
3. Bagaimana membangun komunikasi antara mikrokontroler dengan
1.5Batasan Masalah
Adapun batasan masalah dalam penelitian ini antara lain:
1. Pengendalian mencakup kontrol kecepatan dan kontrol pengereman motor induksi jenis rotor sangkar menggunakan mikrokontroler arduino tipe mega 2560.
2. Sistem pengereman motor induksi dilakukan dengan menerapkan metode pengereman secara plugging.
3. Tidak membahas pemrograman mikrokontroler/ android.
1.6Hipotesis
Pada penelitian ini akan dirancang suatu prototipe kontroler untuk mengendalikan motor induksi. Adapun pengendalian meliputi kecepatan putaran dan pengereman motor induksi. Mula mula operator akan mengirimkan intruksi dari smartphone android yang kemudian akan diterima oleh mikrokontroler melalui perangkat
bluetooth. Selanjutnya mikrokontroler akan memproses intruksi tersebut dan
memerintahkan komponen pengendali untuk mengatur kecepatan putaran motor ataupun melakukan pengereman pada motor induksi.
1.7Sistematika Penulisan
Bab ini berisi tentang latar belakang penelitian, tujuan penelitian, manfaat penelitian, rumusan masalah, batasan masalah, hipotesis, dan sistematika penulisan laporan penelitian.
II. TINJAUAN PUSTAKA
Bab kedua ini berisi tentang materi dan dasar teori yang menjadi landasan perancangan alat maupun referensi referensi dari berbagai sumber yang berkaitan dengan permasalahan dalam penelitian ini.
III. METODE PENELITIAN
Bab ketiga ini berisi tentang alat/ komponen, prosedur, dan metode yang digunakan dalam perancangan prototipe dalam penelitian ini.
IV. HASIL DAN PEMBAHASAN
Bab keempat ini berisi tentang hasil yang didapat dari penelitian, pembahasan, dan analisa yang dilakukan berdasarkan hasil penelitian yang didapat.
V. PENUTUP
II.
TINJAUAN PUSTAKA
2.1Motor Induksi
Motor induksi merupakan jenis motor ac yang paling banyak digunakan. Penamaan induksi berasal dari cara kerja dari motor ini yaitu dimana rotor yang berputar akibat induksi dari medan putar yang dihasilkan pada stator. Perbedaan putaran relatif antara stator dan rotor disebut dengan slip. Pertambahan beban akan memperbesar kopel motor sehingga arus yang terinduksi ke rotor akan bertambah besar. Hal tersebut menyebabkan slip antara medan putar pada stator dan putaran rotor pun akan bertambah besar. Jadi, ketika beban motor bertambah maka putaran akan cenderung menurun.
(2.1)
Dimana:
Khususnya pada dunia industri, motor induksi 3 fasa merupakan alat penggerak yang banyak digunakan dan mulai menggeser motor dc dengan alasan motor induksi memiliki kontruksi yang lebih kokoh dan sederhana, perawatan yang mudah dan harganya yang relatif murah dibanding motor dc. Namun motor induksi memiliki beberapa parameter yang bersifat nonlinier salah satunya resistansi rotor.
Resistansi rotor pada motor induksi bervariasi pada setiap kondisi yang berbeda. Kelemahan tersebut menyebabkan motor induksi tidak dapat mempertahankan kecepatannya secara konstan bila terjadi perubahan beban. Motor induksi akan mengalami penurunan kecepatan ketika beban bertambah. Untuk memperbaiki masalah tersebut, maka diperlukan suatu pengontrol atau kontroler yang akan bekerja untuk mempertahankan kecepatan secara konstan sehingga menghasilkan performansi yang lebih baik dari sebelumnya.
Berdasarkan kumparannya, rotor motor induksi dibagi menjadi rotor sangkar
(squirrel-cage rotor) dan rotor kumparan (wound rotor). Perbedaan mendasar dari
rotor sangkar dengan rotor kumparan adalah terdapat pada kontruksi rotor[1].
1. Rotor Sangkar (Squirrel - Cage Rotor)
• Tahanan rotor tetap. • Arus starting tinggi. • Torsi starting rendah.
2. Rotor Kumparan
Rotor kumparan merupakan kumparan yang dihubungkan bintang dibagian dalam dan ujung yang lain dihubungkan dengan cincin geser (slipring) ke tahanan luar. Kumparan dapat dikembangkan menjadi pengaturan. Untuk kecepatan putaran motor, pada kerja normal cincin geser hubung singkat secara otomatis, sehingga rotor bekerja seperti rotor sangkar. Rotor kumparan mempunyai karakteristik:
• Memungkinkan tahanan luar dihubungkan ke tahanan rotor melalui slipring yang terhubung singkat.
• Arus starting yang rendah. • Torsi starting yang tinggi. • Power faktor baik.
2.1.1 Konsep Dasar Kopel dan Kontrol Kecepatan Motor Induksi 3 fasa[2]
Gambar 2.1 diatas merupakan gambar rangkaian ekuivalen dari motor induksi. Dari rangkaian ekuivalen pada gambar diatas, maka besarnya arus I2 adalah:
(2.2)
Dimana:
=Tegangan Induksi Stator
= Arus Rotor
=
= Resistansi Rotor
= Reaktansi Rotor
= Slip
(2.3)
Daya input rotor adalah:
(2.4)
Kecepatan sudut
Dimana besarnya daya input rotor 3 fasa adalah:
(2.5)
Bila persamaan 2.5 disubstitusikan ke persamaan 2.4 maka didapat kopel motor induksi 3 fasa:
(2.6)
Motor pada umumnya berputar dengan kecepatan konstan, mendekati kecepatan sinkronnya. Meskipun demikian pada penggunaan tertentu dikehendaki juga adanya pengaturan putaran. Pengaturan motor induksi memerlukan biaya yang lumayan tinggi. Pengaturan kecepatan putaran motor induksi tiga fasa dapat dilakukan dengan beberapa cara :
1. Mengubah jumlah kutub motor 2. Mengubah frekuensi jala jala
3. Mengatur tegangan jala jala/ sumber
Bila dianggap kecil sehingga E1 dianggap sama dengan V1 dan
persamaan 2.2 dan 2.3 disubstitusikan ke persamaan 2.6, maka besarnya kopel motor induksi 3 fasa yaitu:
(2.7)
[image:34.612.226.423.414.548.2]Persamaan kopel motor induksi diatas menerangkan bahwa kopel motor induksi 3 fasa sebanding dengan nilai tegangan yang diberikan dikuadratkan. Ketika merubah nilai tegangan sumber pada beban tertentu dengan mengabaikan besarnya tahanan rotor, reaktansi rotor yang konstan, serta nilai slip maka akan terjadi perubahan kecepatan. Pengaturan kecepatan motor induksi dengan mengubah nilai tegangan sumber ini memiliki jangkauan kerja yang lebih luas.
Gambar 2. 2Karakteristik pengaturan tegangan terhadap torsi[2]
2.1.2 Pengereman Motor Induksi[1]
cenderung masih berputar beberapa saat. Waktu yang dibutuhkan oleh motor tersebut untuk benar benar berhenti tergantung pada kelembaman motor, beban dan friksi motor itu sendiri. Pada pengereman secara elektrik torsi pengereman dihasilkan berdasarkan nilai arus injeksi yang diberikan pada belitan stator. Energi putaran rotor diubah menjadi energi elektrik yang kemudian dikembalikan ke suplai daya, atau dengan memberikan suatu medan magnet stasioner pada stator sehingga putaran rotor akan berkurang dengan sendirinya.pengereman secara elektrik memiliki keunggulan yaitu lebih halus dan tidak ada hentakan yang terjadi. Pengereman secara elektrik tidak dapat menghasilkan torsi untuk menahan beban dalam keadaan sudah berhenti dan membutuhkan sumber energi listrik untuk mengoperasikannya.
Menghentikan motor dilakukan dengan cara menghilangkan tegangan sumber hingga diperoleh kecepatan putaran sama dengan nol. Terdapat beberapa metode sistem pengereman yaitu:
1. Dengan memakai perangkat friksi mekanik untuk memberhentikan dan menahan beban (mekanis).
2. Dengan menginjeksikan arus DC terhadap lilitan motor pada saat suplai AC diputuskan (dinamik).
3. Mengandalkan energi yang dihasilkan motor pada saat motor tersebut digerakkan beban (regeneratif).
Pada penelitian ini akan membahas sistem pengereman motor induksi 3 fasa dengan metode pengereman plugging.
2.1.3 Pengereman Plugging[6]
[image:36.612.217.416.368.496.2]Pada umumnya pabrik industri dengan skala besar membutuhkan beberapa pengaturan yang mensyaratkan motor harus dapat berhenti dalam durasi waktu yang cepat untuk keperluan perlindungan. Pengereman plugging merupakan pengereman yang mampu menghentikan motor dengan durasi waktu yang cepat. Karakteristik torsi kecepatan motor induksi dapat dilihat pada gambar dibawah ini.
Gambar 2. 3 Kurva Torsi - Kecepatan Motor Induksi[6]
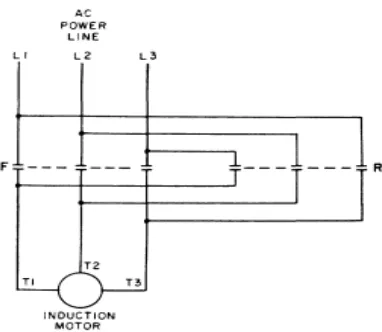
Gambar 2. 4 Induction Motor Plugging Wiring
Gambar 2.5 dan 2.6 menjelaskan hubungan antara torsi motor dengan waktu yang ditempuh motor untuk berbalik arah (plugging) dalam kondisi tidak berbeban dan beban penuh. Dari gambar menununjukkan bahwa waktu yang dibutuhkan motor untuk dapat berhenti/ pengereman yaitu sekitar 1,78s pada keadaan tanpa beban dan 1,28s dalam keadaan berbeban. Namun torsi pengereman yang dihasilkan pada pengereman plugging ini memiliki kekurangan yaitu torsi pengereman yang dihasilkan transient sehingga dapat mengurangi umur pemakaian motor tersebut.
Gambar 2. 6 Kurva Pengereman Plugging Dalam Kondisi Beban Penuh
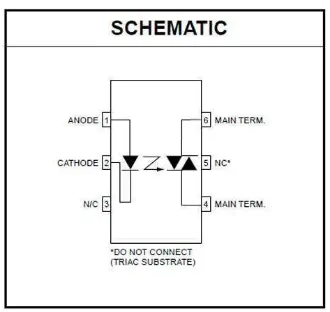
2.2Relai Solid State[1]
Berbeda dengan relai elektromagnetis, SSR ( solid state relay ) merupakan relai yang tidak memiliki kumparan dan kontak sesungguhnya dan sebagai penggantinya maka digunakan alat penghubung semikonduktor seperti transistor bipolar, mosfet, scr, atau triac. Relai solid state tidak memiliki bagian yang berputar, relai tersebut tahan terhadap goncangan dan getaran serta tertutup rapat terhadap kotoran dan kelembaban.
Tegangan kontrol untuk SSR dapat arus searah atau bolak balik, dan biasanya berkisar antara 3 sampai 32 volt untuk versi dc dan 80 sampai 280V untuk versi ac. Pada sebagian besar aplikasi, SSR digunakan sebagai perantara antara rangkaian kontrol tegangan rendah dengan tegangan line ac yang lebih tinggi.
SSR memiliki beberapa keuntungan dibandingkan dengan relai elektromagnetis. SSR lebih dipercaya mempunyai umur pemakaian yang lebih panjang karena SSR tidak memiliki bagian yang bergerak, dapat digabungkan dengan rangkaian transistor dan sikuit IC, serta tidak banyak menimbulkan interferensi elektromagnetis. SSR lebih tahan terhadap goncangan dan terhadap getaran serta memiliki waktu respon yang lebih cepat.
Zero crossing detector merupakan rangkaian elektronika yang berfungsi untuk
Gambar 2. 8 sinyal output zero crossing detector circuit dan ssr beban resistif[1]
Dalam pengaplikasiannya pada rangkaian elektronika dengan beban induktif akan menimbulkan lonjakan tegangan yang berasal dari proses induksi beban induktor tersebut. Lonjakan yang berasal dari proses induksi dari beban induktor memiliki level tegangan yang cukup besar sehingga lonjakan tegangan dari beban induktif ini dapat mengganggu kinerja rangkaian yang lain. Terjadinya lonjakan tegangan induktif pada beban induktor ini terjadi pada saat beban induktor tersebut pertama kali diberikan sumber tegangan (ON) dan pada saat tegangan sumber diputuskan (OFF).
kapasitor dan resistor paralel pada beban induktif tersebut seperti terlihat pada gambar berikut:
Gambar 2. 9 rangkaian snubber komponen switching[1]
Output dari opto- isolator akan mengendalikan TRIAC yang dihubungkan secara
seri dengan beban pada tiap fasa. Optoisolator ini hanya akan beroperasi pada posisi zero voltage crossing bahkan jika switching berada pada tegangan puncak, beban akan kembali ON setelah melewati zero voltage crossing. Dari penerapan ZVS tersebut akan menghasilkan efisiensi yang lebih baik saat proses switching. ZVS akan meningkatkan umur pemakaian dari kontroler serta beban dan mengurangi kemungkinan pembentukan busur di relai. Tanpa ZVC, optoisolator dapat beroperasi, namun pada tegangan yang kuat dapat mengakibatkan busur api( spark)[7].
power on-board, Kontrol lalu lintas, Kontrol Elevator, trafo, valve, motor, solenoid dll[7].
2.3Pemrograman Smartphone Android
Smartphone android merupakan suatu perangkat seluler yang menawarkan
usernya untuk dapat mengembangkan dan membuat aplikasi dengan sistem operasi android. Untuk membuat suatu aplikasi android digunakan pemrograman dengan bahasa pemrograman berbasis java. Beberapa software yang dapat digunakan untuk membangun/ merancang aplikasi android antara lain eclipse dan appinventor.
2.3.1 Konsep Umum[3]
Gambar 2. 10 Siklus activity pemrograman android
Selama siklus ini berjalan, activity bisa mempunyai lebih dari 2 status seperti yang terlihat pada gambar 2.10. Kita tidak bisa mengontrol setiap status karena semuanya sudah ditangani oleh sistem. Namun kita akan mendapat pesan saat terjadi perubahan status melalaui method onXX(). Berikut penjelasan setiap status:
a. onCreate(Bundle): Dipanggil saat pertama kali aplikasi dijalankan. Kita dapat
menggunakan ini untuk deklarasi variabel atau membuat user interface.
b. onStart() Mengindikasikan activity yang ditampilkan ke pengguna (user).
c. onResume() Dipanggil saat aplikasi kita mulai berinteraksi dengan pengguna.
Disini sangat cocok untuk meletakkan animasi ataupun musik.
d. onPause() Dipanggil saat aplikasi yang kita jalankan kembali ke halaman
e. onStop() Dipanggil saat aplikasi Kita berjalan di belakang layar dalam waktu cukup lama.
f. onRestart() Activity kembali menampilkan user interface setelah status stop.
g. onDestroy() Dipanggil saat aplikasi benar-benar berhenti.
h. onSaveInstanceState(Bundle) Method ini mengijinkan activity untuk
menyimpan setiap status intance. Misalnya dalam mengedit teks, kursor bergerak dari kiri ke kanan.
i. onRestoreInstanceState(Bundle) Diapanggil saat activity kembali
meng-inisialisasi dari status sebelumnya yang disimpan oleh onSaveInstanceState(Bundle).
Sebagai programmer diharuskan mengetahui beberapa komponen aplikasi yang sangat penting seperti activities, intens, service, dan content providers.
a. Activity
b. Service
Service tidak memliki user interface, namun berjalan di belakang layar. Misalnya music player, sebuah activity digunakan untuk memilih lagu kemudian di-play. Agar music player bisa berjalan dibelakang aplikasi lain maka harus menggunakan service.
c. Intens
Intens adalah mekanisme untuk menggambarkan sebuah action secara detail
seperti bagaimana cara mengambil sebuah poto.
d. Content Providers
Menyediakan cara untuk mengakses data yang dibutuhkan oleh suatu activity, misalnya kita menggunakan aplikasi berbasis peta (MAP). Activity membutuhkan cara untuk mengakses data kontak untuk prosedur navigasi. Disinilah peran content providers.
2.3.2 Paket Bluetooth Android[8]
Platform android terdapat sebuah stack bluetooth yang memungkinkan pengguna
untuk bertukar data dengan perangkat bluetooth lainnya secara nirkabel. Kerangka aplikasi ini memberikan akses fungsi bluetooth ini melalui APIs bluetooth android. API ini memungkinkan aplikasi nirkabel terhubung dengan perangkat bluetooth lainnya, yang bisa akses point-to-point ataupun multipoint.
Dengan menggunakan API bluetooth ini, sebuah android dapat melakukan beberapa hal, antara lain:
• Memindai perangkat bluetooth lainnya.
• Membuat sambungan RFCOMM.
• Membangun sebuah sambungan dengan menggunakan pencarian layanan pencarian.
• Mengirimkan data dari dan ke perangkat lainnya. • Mengatur banyak koneksi.
Semua API bluetooth ini dapat ditemukan dalam paket android.bluetooth. Berikut ini class dan interface yang akan dibutukan untuh membuat sebuah komunikasi bluetooth.
a. BluetoothAdapter
b. BluetoothDevice
c. BluetoothSocket
d. BluetoothServerSocket
e. BluetoothClass
f. BluetoothProfile
g. BluetoothHeadset
h. BluetoothA2dp
i. BluetoothHealth
j. BluetoothHealthCallback
k. BluetoothHealthAppConfiguration
l. BluetoothProfileServiceListener
menampilkan komunikasi bluetooth, seperti meminta sebuah sambungan, menerima sebuah sambungan, dan transfer data. Contoh pendeklarasian perizinan bluetooh dapat dilihat pada kode program berikut.
Gambar 2. 11 Bluetooth Permission untuk mengaktifkan
2.3.3 Pemrograman AppInventor[4]
AppInventor adalah program yang sangat bagus yang dibuat oleh Google dan sekarang dikembangkan oleh MIT. Program ini dapat digunakan untuk membuat dan mendesain aplikasi Android yang berbasis Web page dan Java interface. Hanya dengan pengetahuan pemograman yang sedikit kita sudah bisa membuat sebuah aplikasi Android yang sederhana. Jika kita sudah berpengalaman menggunakan App Inventor kita juga bisa membuat program yang sangat rumit
<manifest ... > <uses-permission
android:name="android.permission.BLUETOOTH" />
...
dan berguna hanya dengan menggukan App Inventor. App Inventor merupakan aplikasi untuk membuat program yang terdiri dari dua bagian yaitu: Design view dan Block Editor.
a. Design view
Gambar 2. 12 design view Appinventor
terlihat tapi sangat berguna seperti database dan pengaturan layar. Design view terdiri dari lima komponen dasar:
• Palette
• Viewer
• Component
• Media
• Properties
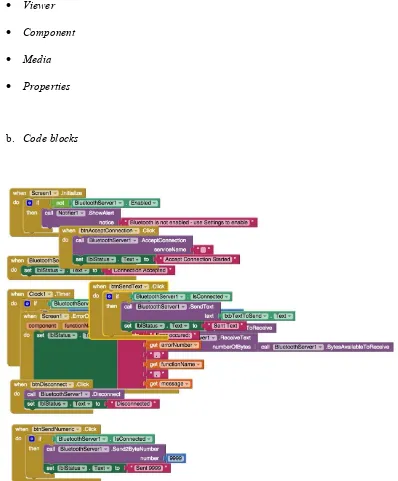
[image:49.612.127.525.162.643.2]b. Code blocks
Code blocks pada App Inventor digunakan untuk melakukan atau mengatur jalannya si program. Code blocks merupakan bagian paling penting dalam pemograman karena code block merupakan inti dari pemograman. Code blocks terdiri dari beberapa grup yang memilki fungsi berbeda-beda. Grup yang ada pada
Code blocks Antara lain:
• Controlblocks
Code blocks pada pada grup ini digunakan untuk mengatur bagaimana alur
aplikasi yang kita buat itu berjalan.
• Logicblocks
Logic blocks berisikan block block yang mengindikasikan nilai Boolean yang
mana nilai boolean ini sering digunakan untuk menentukan kondisi.
• Mathblocks
Block ini digunakan untuk memanipulasi angka dan memasukkan angka.
• Textblocks
Block yang berada dalam grup ini digunakan untuk memanipulasi, mengolah,
dan menyeleksi argumen dalam bentuk text.
• List blocks
Block yang berada dalam grup ini digunakan untuk memanipulasi, mengolah,
dan menyeleksi list atau kumpulan dari nilai(variabel).
• Colorsblocks
Block yang berada dalam grup ini digunakan untuk memanipulasi dan
mengolah warna.
Block yang berada dalam grup ini digunakan untuk memanipulasi dan mengolah variable.
• Procedureblocks
Block yang berada dalam grup ini digunakan untuk membuat dan memanggil
procedure, jadi kita tidak akan menulis ulang kode yang sama.
2.4Mikrokontroller Arduino MEGA2560[5]
Arduino mega2560 merupakan mikrokontroler berbasis ATmega2560. Arduino mega 2560 Ini memiliki fasilitas 54 digital pin input / output (15 pinnya dapat digunakan sebagai output PWM), 16 analog input, 4 UART (hardware port serial), osilator kristal 16 MHz, koneksi USB, socket jack, header ICSP, dan tombol reset. Semua fasilitas tersebut digunakan untuk mendukung mikrokontroler hanya dengan menghubungkannya ke komputer dengan kabel USB atau kabel power dengan adaptor AC-DC atau baterai untuk dapat digunakan. Arduino Mega2560 ini kompatibel dengan sebagian shield yang dirancang untuk Arduino Duemilanove atau Diecimila.
Arduino Mega2560 merupakan revolusi dari Arduino mega yang digantikan. Arduino Mega2560 berbeda dari semua tipe sebelumnya yang tidak menggunakan FTDI chip driver USB-to-serial. Sebaliknya, fitur ATmega16U2 (ATmega8U2 dalam revisi1 dan revisi2) diprogram sebagai converter USB-to-serial.
Revisi 2 dari Mega2560 memiliki resistor pulling yang menghubungkan 8U2 HWB dari sumber ke ground, sehingga lebih mudah berada dalam mode DFU. Sedangkan Revisi 3 dari arduino ini memiliki fitur-fitur baru sebagai berikut:
• 1.0 pinout: menambahkan pin SDA dan pin SCL yang berada dekat dengan
pin AREF dan dua pin baru lainnya ditempatkan dekat dengan pin RESET, IOREF memungkinkan shield untuk beradaptasi dengan tegangan yang disediakan dari board. Pada desain selanjutnya, shield akan kompatibel baik dengan board yang menggunakan AVR dan beroperasi dengan 5V maupun dengan Arduino due yang beroperasi dengan tegangan 3.3V.
• circuit RESET.
• Atmega 16U2 menggantikan 8U2.
Tabel 2. 1 Karakteristik Arduino MEGA2560 Karakteristik Arduino Mega2560
Mikrokontroler ATmega2560 Tegangan operasi 5V
Tegangan input (batas) 6 – 20V
Digital I/O Pins 54 ( 15 pin output PWM)
Analog input pin 16
Arus DC per I/O Pin 40mA Arus DC pada pin 3,3V 50mA
Flash Memory 256 KB, 8 KB digunakan untuk bootloader
SRAM 8KB
EEPROM 4KB
[image:53.612.167.473.376.602.2]Frekuensi clock 16MHz
Suplai daya
Suplai daya pada arduino mega didapatkan melalui koneksi USB atau dengan catu daya eksternal. Sumber daya dapat dipilih secara otomatis. Suplai daya Eksternal (non-USB) bisa didapat melalui adaptor AC-DC (wall-wart) atau baterai. Adaptor dihubungkan dengan mencolokkan steker 2.1mm ke colokan listrik pada board.
board dapat beroperasi pada pasokan eksternal 6 sampai 20 volt. Jika suplai kurang dari 7V, maka pin 5V akan memasok kurang dari lima volt dan board mungkin tidak stabil. Jika menggunakan lebih dari 12V, regulator tegangan bisa panas dan merusak board. Kisaran yang disarankan adalah 7 sampai 12 volt. Pin power antara lain sebagai berikut:
• VIN. Tegangan input ke Arduino board ketika menggunakan sumber daya
eksternal (5 volt dari koneksi USB atau power regulator lainnya). Kita dapat menyediakan tegangan melalui pin ini, atau jika memasok tegangan melalui colokan listrik, dapat diakses melalui pin ini.
• 5V. Pin ini memiliki output 5V yang diatur dari regulator pada board. Board
dapat disuplai melalui beberapa sumber yaitu colokan listrik DC (7 - 12V), konektor USB (5V), atau pin VIN pada boars (7-12V). menyuplai tegangan melalui pin 5V atau pin 3.3V dapat mem-bypass regulator, dan dapat merusak board.
• 3V3. Suplay daya 3,3 volt yang dihasilkan oleh regulator
on-board. Mempunyai arus maksimum sebesar 50 mA.
• IOREF. Pin ini digunakan untuk memberikan tegangan referensi sesuai
III.
METODE PENELITIAN
3.1Waktu dan Tempat Penelitian
Pelaksanaan penelitian tugas akhir ini diestimasikan berlangsung mulai dari bulan juni 2015 hingga September 2015. Sedangkan perancangan, pengerjaan perangkat keras (hardware), dan penyusunan laporan akan dilakukan di Laboratorium Terpadu Teknik Elektro Universitas Lampung.
3.2Alat dan Bahan
Alat dan bahan yang digunakan dalam penelitian ini terbagi menjadi 2 yaitu perangkat keras( hardware) dan perangkat lunak (software). Perangkat keras yang akan digunakan antara lain:
1. PC (Komputer) berfungsi sebagai media perancangan alat dan pnyusunan laporan penelitian.
2. 1 unit solder, timah, kabel dan beberapa unit PCB board untuk realisasi rangkaian.
3. 1 unit project board sebagai pengujian rangkaian. 4. Akrilik sebagai media casing rangkaian
6. Bor PCB sebagai alat bantu perancangan alat.
Disamping itu, didalam penelitian ini terdapat komponen komponen utama yang akan penulis gunakan dalam merancang prototipe alat antara lain:
1. Mikrokontroler Arduino MEGA2560 2. Modul Bluetooth HC 05
3. Komponen Catu Daya
4. Komponen gate driver dan kontrol pengereman 5. LCD ( Licuid Dislay Crystal)
6. Motor AC 3 Fasa 7. Beban Motor
8. Smartphone Android
Sedangkan perangkat lunak (software)yang akan digunakan antara lain:
1. Arduino Integrated Development Environment (IDE) untuk pembuatan kode
program (sketch) yang akan diunggah ke dalam mikrokontroler Arduino.
2. Diptrace untuk membangun rangkaian yang digunakan dalam penelitian.
3. Microsoft office Visio dan ISIS PROTEUS yang berfungsi sebagai media pembuatan
bagan Flowchart penelitian dan skematik rangkaian.
3.3Prosedur Penelitian
1. Studi literatur
Pada tahap studi literatur ini akan dilakukan pengumpulan referensi yang akan digunakan sebagai pedoman dalam melakukan perancangan alat. Dari referensi referensi tersebut akan dipelajari komponen, metode, rangkaian, dan hal hal lainnya yang berhubungan dengan perancangan alat. Tahap ini juga bertujuan untuk mendapatkan hasil yang sesuai dengan karakteristik dan prinsip kerja dari komponen komponen maupun program yang akan digunakan dalam merancang alat. Beberapa referensi yang dikumpulkan antara lain:
a. Prinsip kerja motor induksi 3 fasa b. Pengereman motor induksi 3 fasa
c. Pengaturan kecepatan motor induksi 3 fasa d. Pemrograman aplikasi android
e. Arduino MEGA2560 dan pemrogramannya
f. Rangkaian dan karakteristik komponen yang akan digunakan (Data sheet)
2. Perancangan Alat
Dalam tahap perancangan alat ini terdiri dari beberapa tahap yang akan dilakukan antara lain:
a. Perancangan modul catu daya
b. Perancangan modul pengereman plugging c. Perancangan modul kontrol gate driver d. Perancangan beban motor
f. Pemrograman dan perancangan aplikasi smartphone android
3. Pengujian alat
Dalam tahap pengujian ini akan dilakukan untuk melihat keberhasilan alat sesuai dengan prinsip kerjanya dan referensi yang digunakan. Selain itu, saat engujian berlangsung akan dilakukan pengambilan data data yang akan digunakan sebagai acuan untuk menganalisa hasil pengujian. Tahap pengujian ini terdiri dari beberapa proses antara lain:
a. Pengujian Mikrokontroler Arduino MEGA2560
Pengujian mikrokontroler ini dilakukan dengan melihat output yang dihasilkan daripada mikrokontroler seperti tampilan lcd dan gelombang PWM yang dihasilkan.
b. Pengujian modul gate driver
Gate driver merupakan penghubung antara mikrokontroler dan rangkaian daya.
c. Pengujian aplikasi smartphone android
Pengujian ini dilakukan dengan melihat proses yang berjalan dari aplikasi yang dibangun. Proses yang dimaksud berupa tampilan menu dan fungsi dari setiap sub menu yang ada yang disesuaikan dengan program yang telah ditanamkan pada sub menu tersebut.
d. Pengujian komunikasi Bluetooth
Pengujian komunikasi bluetooth ini dilakukan dengan melihat kesesuaian antara instruksi yang diberikan dari setiap sub menu pada aplikasi smartphone android dengan aksi yang diberikan oleh mikrokontroler. Pengujian juga dilakukan dengan mengukur jarak koneksi antara perangkat modul bluetooth dengan smartphone android. Dari pengujian tersebut akan didapatkan hasil berupa batas jarak koneksi maksimal antara keduanya. Pengujian ini akan dilakukan pada dua kondisi yaitu pada ruangan tertutup dan pada ruangan terbuka.
e. Pengujian beban motor
f. Pengujian modul pengereman
Pengujian ini dilakukan dengan melihat proses interlocking yang terjadi pada setiap
relay yang digunakan yaitu relay pengereman dan relay daya pada motor. Pengujian
lainnya juga berupa rentang waktu yang ditempuh untuk motor dapat berhenti secara total.
g. Pengujian keseluruhan
Pengujian ini merupakan pengujian tahap akhir dimana pengujian dilakukan secara menyeluruh. Pengujian ini dilakukan dengan melihat interaksi yang terjadi antara
smartphone android yang digunakan dengan aksi daripada motor yaitu berupa
kecepatan yang dihasilkan serta pengereman yang akan dilakukan motor.
1. Analisa data hasil pengujian
3.4Realisasi Pembuatan Alat
Tahap realisasi pembuatan alat merupakan tahap penentuan rangkaian dan nilai-nilai komponen yang digunakan. Pembuatan alat akan dilakukan setelah perancangan selesai dan dilanjutkan dengan pembuatan program mikrokontroler dan aplikasi smartphone android. Prototipe alat dibangun oleh beberapa subsistem yaitu modul catu daya, modul kendali gate driver, modul pengereman, mikrokontroler dan aplikasi android. Sebagai pelengkap ditambahkan juga antarmuka keluaran menggunakan LCD (Licuid Crystal Display).
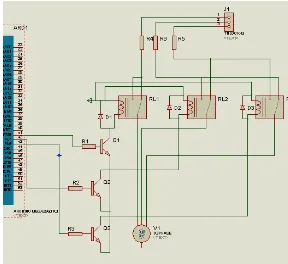
Modul pengereman dibangun dengan mengaplikasikan rangkaian relay pengereman yang terdiri dari beberapa komponen elektronika yaitu transistor, resistor, relay, dioda dll. Pembuatan kode program (sketch) untuk mikrokontroler Arduino menggunakan
software Arduino integrated development environment (IDE). Selanjutnya, program di
upload / diunggah ke dalam mikrokontroler melalui kabel USB sebagai konektor antara
komputer dengan mikrokontroler arduino. Adapun beberapa proses yang dilakukan dalam tahapan ini adalah :
a. Perangkat keras (hardware):
1. Menggambar rangkaian elektronika menggunakan komputer dengan bantuan program aplikasi Diptrace.
2. Memplot hasil gambar rangkaian pada PCB.
3. Melakukan pemasangan komponen pada PCB.
b. Perangkat lunak (Arduino)
1. Mencari referensi program dan library program yang akan digunakan 2. Menuliskan kode program (sketch) pada komputer.
3. Mengupload kode program dari komputer ke mikrokontroler arduino.
c. Aplikasi Android
1. Mencari referensi program yang akan digunakan untuk membangun aplikasi 2. Mendesain tampilan dan user interface aplikasi yang akan dibuat
3. Memasukkan program kedalam user interface yang telah dibuat
3.5Interfacing Android Smartphone
Dalam perancangan aplikasi android ini terdiri atas beberapa menu dan submenu. Setiap submenu berisikan instruksi instruksi yang nantinya akan dikirimkan oleh aplikasi ke mikrokontroler melalui komunikasi bluetooth. Kemudian mikrokontroler akan menerima intruksi intruksi tersebut untuk selanjutnya diproses dan dikirimkan ke komponen pengendali motor.
Gambar3. 2 Diagram alir interfacing aplikasi smartphone android
3.6Perancangan Mikrokontroler Arduino
yang terdapat pada mikrokontroler. Ketika melakukan konfigurasi koneksi terhadap perangkat bluetooth, perlu dipastikan perangkat dalam keadaan aktif dan tidak terkoneksi dengan perangkat nirkabel lainnya. Untuk mengatur koneksi terhadap
bluetooth, konfigurasi default bluetooth yang digunakan yaitu:
Baudrate: 9600 bps
Nama: Linvor Pairing kode: 1234
konfigurasi tersebut dapat diatur melalui serial monitor pada arduino IDE. Untuk menguji koneksi arduino terhadap bluetooth dengan mengirimkan perintah “AT” dan jika berhasil maka bluetooth akan menjawab “OK”. Untuk mengatur konfigurasi
baudrate yaitu dengan mengirimkan perintah “AT+BAUD(no.kode)”. jika bluetooth
terhubung maka bluetooth akan menjawab “OK”. Untuk mengatur konfigurasi nama maka dapat kita ubah dengan mengirimkan perintah “AT+NAME(nama yang diinginkan)”. Jika berhasil maka bluetooth akan menjawab “OKsetname”. Sedangkan untuk mengatur konfigurasi kode pin kita dapat mengubahnya dengan mengirimkan perintah "AT+PIN(kode)” dan jika berhasil maka bluetooth akan menjawab “OKsetPIN”. Contoh perintah konfigurasi:
AT+BAUD4 AT+NAMEcharlie AT+PIN111210
1 :1200bps 2 :2400bps 3 :4800bps 4 :9600bps 5 :19200bps 6 :38400bps 7 :57600bps 8 :115200bps 9 :230400bps A :460800bps B :921600bps C :1382400bps
Gambar3. 3 Diagram alir mikrokontroler arduino
3.7Diagram Alir Penelitian
IV.
PEMBAHASAN
4.1Hasil Perancangan Alat
Dari penelitian tugas akhir ini dihasilkan sebuah prototipe alat pengendali kecepatan motor induksi 3 fasa menggunakan android smartphone. Pengendalian ini dilakukan dengan cara mengirimkan sebuah instruksi dari android kepada alat pengendali (prototipe) melalui media bluetooth. Prototipe yang dibangun terdiri dari beberapa modul rangkaian pengendali diantaranya yaitu modul power supply, modul zero crossing detector, modul pengereman dan tahanan tangga, modul gate driver, bluetooth hc 06, dan mikrokontroler arduino mega 2560. Sedangkan pada android yaitu berupa aplikasi program berbasis java yang dibangun dengan menggunakan software appinventor.
4.1.1 Aplikasi Motor controller
Aplikasi motor controller yang telah dibuat merupakan aplikasi yang dibangun dengan menggunakan software pengembang berbasis web page dan java
interface, yaitu appinventor. Aplikasi motor controller ini didesain dengan
.
Gambar 4. 1 Tampilan Aplikasi Motor controller
Pada sub sistem design view dilakukan desain User interface yaitu cara aplikasi agar dapat berinteraksi dengan pengguuna melalui tampilan. Tampilan tersebut dibuat dengan memanfaatkan komponen komponen yang ada pada user interface component antara lain yaitu label, textbox, button, dan wallpaper dengan layout
arrangement. walaupun tampilan user interface telah dibuat, namun aplikasi
4.1.2 Perangkat Bluetooth
Perangkat bluetooth digunakan sebagai media pengiriman instruksi dari android ke prototipe pengendali. Adapun pengiriman instruksi menggunakan modul
bluetooth ini dapat berupa karakter, angka, maupun teks. Setiap tombol
pengendali berisikan instruksi yang akan dikirim oleh android kepada prototipe pengendali kemudian diterjemahkan untuk selanjutnya dieksekusi oleh rangkaian dan komponen pengendali. Agar dapat menggunakan komunikasi bluetooth diperlukan sebuah perangkat bluetooth tambahan yang berfungsi sebagai client. Adapun perangkat bluetooth yang digunakan memiliki spesifikasi yaitu:
1. Tipe perangkat : Bluetooth HC-06 2. Mode perangkat : slave
3. Nama perangkat : HC-06
4. Password : 1234 (default)
5. Baudrate : 9600 (default)
Gambar 4. 2 Tampilan fisik Modul bluetooth HC-06
baudrate dan password modul bluetooth dapat disetting/ diubah dengan menggunakan perangkat usb-ttl converter.
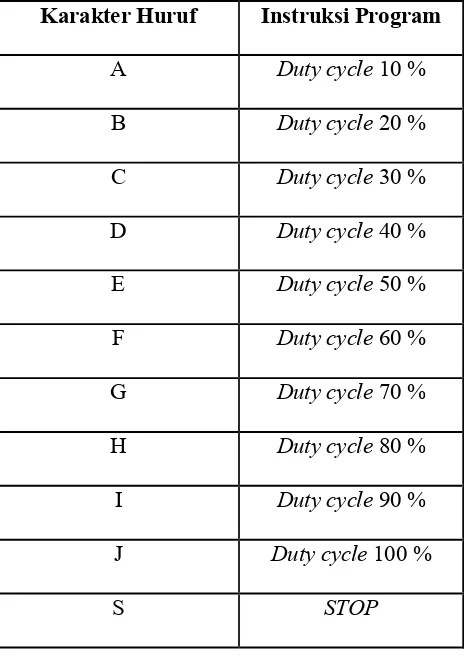
[image:72.612.206.438.288.616.2]Pengiriman instruksi dari perangkat android ke mikrokontroler yang dilakukan berdasarkan karakter. Setiap karakter yang dikirim dari setiap tombol pengendali pada aplikasi mewakili instruksi yang akan dieksekusi oleh mikrokontroler. Daftar karakter huruf yang digunakan dapat dilihat pada table 4.1
Tabel 4. 1 Daftar Karakter Huruf Berdasarkan Instruksi yang dijalankan Karakter Huruf Instruksi Program
A Duty cycle 10 %
B Duty cycle 20 %
C Duty cycle 30 %
D Duty cycle 40 %
E Duty cycle 50 %
F Duty cycle 60 %
G Duty cycle 70 %
H Duty cycle 80 %
I Duty cycle 90 %
J Duty cycle 100 %
4.1.3 Mikrokontroler Arduino
Perancangan mikrokontroler arduino dilakukan dengan menentukan pin pin yang akan digunakan untuk mengendalikan modul/ komponen pengendali dan pengereman. Dalam penelitian ini digunakan 3 buah mikrokontroler yang berfungsi untuk mengendalikan tegangan di setiap fasanya.
Gambar 4. 3 3 buah mikrokontroler Arduino
Masing masing mikrokontroler akan mengatur tegangan disetiap fasa dengan memanfaatkan program rutin layanan interupsi (interrupt Service Routine) eksternal 0 dan layanan interupsi timer 1. Rutin layanan interupsi eksternal (ISR) merupakan program arduino yang bekerja dengan memanfaatkan interupsi. Pemicu program interrupt terbagi menjadi dua yaitu interrupt internal dan eksternal. Pada penelitian ini memanfaatkan interupsi eksternal berupa sinyal
output dari rangkaian zero crossing detector. Ketika program interrupt ini
3 buah mikrokontroler yang akan menangani 1 sinyal interupsi disetiap fasanya yang berasal dari modul rangkaian zero crossing detector. Untuk menggunakan layanan ISR ini yaitu dengan cara mendeklarasikannya pada program berikut: Attachinterrupt( interrupt, function, mode);
Untuk mengefisiensikan waktu delay pada program interupsi diperlukan sebuah program yang berperan untuk dapat menghitung delay secara tepat. Oleh karena itu digunakan program layanan interupsi timer 1. Ketika program layanan interupsi timer 1 ini diaktifkan, maka timer 1 akan menghitung waktu delay (setperiode) yang diberikan untuk selanjutnya mengaktifkan pwm yang akan mengendalikan gate driver triac yaitu optocoupler moc 3021.
Setiap arduino memiliki jumlah pin yang berbeda yang memiliki fasilitas kedua program diatas. Pada penelitian ini yaitu menggunakan arduino mega 2560 yang memiliki 6 buah pin interrupt (int.0- int.5) dan 6 buah pin timer (timer 0- timer 5). Pemilihan timer harus tepat karena setiap timer memiliki fungsi spesifiknya masing masing. Adapun pin yang digunakan pada kedua program diatas pada penelitian ini yaitu pin 2 untuk program rutin layanan interupsi eksternal 0 (int. 0) dan pin3 untuk layanan interupsi timer 1 yang bernilai 16 bit.
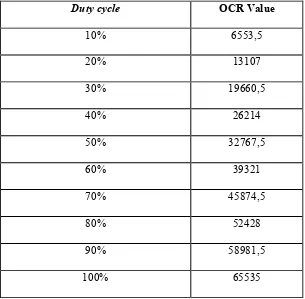
Untuk menentukan nilai duty cycle gelombang PWM yaitu dengan mengatur nilai register OCR pin. Nilai register OCR yang diatur adalah nilai duty cycle yang dikalikan dengan jumlah counter maksimal pada pin timer yang digunakan. Adapun nilai resgister OCR dapat dilihat pada tabel 4.2.
Tabel 4. 2 Nilai Input Register OCR Berdasarkan Nilai Duty cycle
Duty cycle OCR Value
10% 6553,5
20% 13107
30% 19660,5
40% 26214
50% 32767,5
60% 39321
70% 45874,5
80% 52428
90% 58981,5
4.1.4 Modul Power Supply
Gambar 4.4 merupakan gambar rangkaian catu daya yang digunakan pada prototipe kontroler motor induksi 3 fasa. Pada penelitian ini terdapat 2 buah
power supply yang akan digunakan yaitu masing-masing power supply 9 Volt, dan
12 Volt. Power supply 9 Volt digunakan sebagai catu daya mikrokontroler arduino sedangkan power supply 12 Volt digunakan sebagai catu daya kipas pendingin. Secara umum kedua power supply memiliki metode dan komponen yang sama yaitu trafo, dioda bridge, kapasitor, ic regulator LM7809 (untuk supply daya 9v) dan LM7812 (untuk supply daya 12v).
Gambar 4. 4 Rangkaian Power Supply
Gambar 4. 5 Realisasi Rangkaian Power Supply
4.1.5 Modul Gate driver Triac
Untuk mengendalikan atau mengontrol switching triac diperlukan sebuah gate
driver. Gate driver ini berfungsi sebagai interface antara mikrokontroler arduino
dengan rangkaian saklar daya triac. Gate driver ini juga berfungsi sebagai pengaman yang mengisolasi antara arduino dengan rangkaian saklar daya yang bertegangan tinggi sehingga ketika terjadi kerusakan atau short circuit pada rangkaian daya tidak akan berimbas atau menimbulkan kerusakan pada mikrokontroler.
Gambar 4. 6 Rangkaian Gate driver Triac
Dalam rangkaian terdapat kapasitor dan resistor atau yang biasa disebut rangkaian
snubber. Rangkaian ini berfungsi untuk memproteksi triac dari lonjakan tegangan
Dari hasil perhitungan tersebut digunakan resistor dengan nilai yang mendekati yaitu bernilai 200 ohm. Triac yang digunakan pada rangkaian gate driver adalah Triac BT-137 600D yang berjenis sensitive gate triac dengan batas arus maksimal yang dibutuhkan triac untuk dapat melakukan switching yaitu sebesar 8A dengan tegangan <
![Gambar 2. 2 Karakteristik pengaturan tegangan terhadap torsi[2]](https://thumb-ap.123doks.com/thumbv2/123dok/678299.175299/34.612.226.423.414.548/gambar-karakteristik-pengaturan-tegangan-terhadap-torsi.webp)
![Gambar 2. 3 Kurva Torsi - Kecepatan Motor Induksi[6]](https://thumb-ap.123doks.com/thumbv2/123dok/678299.175299/36.612.217.416.368.496/gambar-kurva-torsi-kecepatan-motor-induksi.webp)
![Gambar 2. 15 Arduino Mega2560 PinMapping[5]](https://thumb-ap.123doks.com/thumbv2/123dok/678299.175299/53.612.167.473.376.602/gambar-arduino-mega-pinmapping.webp)