DIRECT TORQUE CONTROL
BERBASIS ADAPTIVE FUZZY LOGIC CONTROLLER
SEBAGAI PENGENDALI KECEPATAN MOTOR INDUKSI TIGA FASA
Muhammad Syahrul Fitrah1, Iradatu DPK2 Jurusan Teknik Elektro
Fakultas Teknik Ilmu Kelautan. Universitas Hang Tuah Surabaya Jl. Arif Rahman Hakim No.150, Surabaya 60111
e-mail :[email protected]
Abstrak: Motor induksi merupakan motor yang banyak digunakan pada dunia industri, disamping harga yang relatif murah, perawatan yang mudah.motor ini memiliki kemapuan yang baik pada kecepatan putar. Kelemahan motor ini adalah pada saat terjadinya perubahan torsi beban, kecepatan motor akan berubah. Pada penelitian ini dibahas tentang sistem pengaturan kecepatan motor induksi dengan metode DTC (Direct Torque Control) yang dapat memberikan respon yang cepat pada saat terjadinya perubahan torsi beban sehingga motor tetap pada kedudukan
steady steate dan akan kembali kekedudukan setpoint dengan cepat.Untuk memperoleh performansi pengaturan kecepatan motor induksi tiga fasa dengan metode DTC (Direct Torque Control) memerlukan sistem kontrol yang baik, artinya sistem kontrol yang dapat mengikuti perubahan kecepatan (setpoint) dengan cepat. Maka dari itu pengaturan kecepatan motor induksi tiga fasa dengan menggunakan metode DTC (Direct Torque Control) dikembangkan dengan menggunakan kontrol kecerdasan Adaptive Fuzzy Controller. Hasil simulasi dengan simulink menunjukkan bahwa dengan kontroler Adaptive Fuzzy pengaturan kecepatan motor induksi saat start terjadi overshoot 0.10%, rise time 1 detik dan setling time 1.1 detik untuk kecepatan motor referensi 1800 rpm. Dengan menggunakan Direct Torque Control ( DTC ) berbasis Adaptive Fuzzy Controller mampu untuk mengikuti kecepatan referensi yang dinamis dengan baik serta dapat menekan ripple sampai ke derajat yang sangat rendah.
Kata Kunci: Motor Induksi, DTC (Direct Torque Control), Kontrol Logika,
Adaptive Fuzzy, Pengaturan Kecepatan
PENDAHULUAN
Motor DC adalah motor yang paling ideal untuk dipakai dalam pengemudian elektrik, karena motor tersebut adalah motor yang linier dan pengaturan kecepatannya mudah. Kelemahan dari motor dc adalah harganya cukup mahal, ukurannya relative besar, dan adanya komutator dan sikat-sikat dalam motor, memerlukan suatu pemeliharaan yang rutin dan selama pemeliharaan operasi system terhenti. Sedangkan motor induksi harganya murah, kokoh dan bebas dari pemeliharaan. Kelemahan motor induksi adalah bahwa motor induksi adalah motor yang tidak linier, dan metoda untuk mengatur kecepatan adalah rumit, disamping itu diperlukan suatu konverter yang akan menimbulkan harmonisa.
Ada banyak metode untuk pengaturan kecepatan motor induksi. Diantara kontrol tersebut adalah kontrol tegangan / frekuensi (v/f) kontrol ini paling sederhana, karena banyak digunakan di industri. Dan juga dikenal sebagai kontrol skalar yang
menggunakan metode antara tegangan / frekuensi konstan Kontrol ini digunakan tanpa umpan balik kecepatan.Menurut pendapat
Casadei, 2006
kelemahan dari kontrol ini belum mencapai nilai yang akurat pada respon kecepatan, dimana kontrol fluks stator dan torka masih menggunakan kontrol tidak langsung. Vektor Kontrol, untuk jenis ini ada loops kontrol untuk mengontrol torka dan fluks. Yang umum digunakan adalah transformasi vektor. Dalam aplikasinya motor induksi pengaturan kecepatanya sulit dilakukan, tetapi setelah adanyaField Oriented Control (FOC)
masalah tersebut dapat diatasi. Sehingga dengan adanya metodeFOC,
motor induksi banyak digunakan diindustri.Field Oriented Control (FOC)
adalah suatu metode pengaturan medan pada motor ac, dimana dari sistemcoupled
dirubah menjadi sistemdecoupled
. Dengan sistem ini arus penguatan dan arus beban motor dapat dikontrol secara terpisah, dengan demikian torsi dan fluksi juga dapat diatur secara terpisah, seperti halnya motor dc.Dengan menggunakan Metode Direct Torque Control untuk mengontrol secara langsung fluks stator dan torsi. Hasil simulasi dengan simulink menunjukkan bahwa dengan kontroler Adaptive Fuzzy pengaturan kecepatan motor induksi tidak berbeban saat start terjadi overshoot 0.8%, rise time 1 detik dan setling time 1.3 detik untuk kecepatan referensi 1800 rpm, dan saat di beri beban 100Nm terjadi overshoot 0.27% pada kecepatan referensi 1500Rpm. Dengan menggunakan
Direct Torque Control
( DTC ) berbasisAdaptive Fuzzy
mampu untuk mengikuti kecepatan referensi yang dinamis dengan baik serta dapat menekan ripple sampai ke derajat yang sangat rendah.DASAR TEORI
Motor Induksi Tiga Fasa
Motor induksi merupakan motor arus bolak balik (AC) yang paling luas digunakan, terutama pada industri-industri. Prinsip kerja motor ini berdasarkan proses induksi yang terjadi pada bagian rotor, dimana arus yang mengalir pada kumparan rotor merupakan arus yang terinduksi sebagai akibat adanya perbedaan antara putaran rotor dengan medan putar stator, yang dihasilkan oleh kumparan stator.
Motor induksi pada umumnya berputar dengan kecepatan konstan, mendekati kecepatan sinkronnya. Meskipun demikian pada penggunaan tertentu dikehendaki juga adanya pengaturan putaran. Pengaturan putaran motor induksi memerlukan biaya yang agak tinggi, sedangkan daerah pengaturan yang diperoleh tidak begitu lebar. Biasanya pengaturan ini dapat dilakukan dengan beberapa cara yaitu dengan mengubah jumlah kutub motor, mengubah frekwensi jala-jala, mengatur tegangan jala-jala, dan mengatur tahanan luar (belly YD, 2014).
Field Oriented Control
Field Oriented Control
(FOC) adalah suatu metode pengaturan medan padamotor ac, dimana dari sistem coupled dirubah menjadi sistem decoupled. Dengan sistem ini arus penguatan dan arus beban motor dapat dikontrol secara terpisah, dengan demikian torsi dan fluksi juga dapat diatur secara terpisah, seperti halnya motor dc. Diagram blok yang menggambarkan prinsip dasar sistem decoupled field oriented control (FOC Decoupled) motor induksi ditunjukkan pada gambar 1.
Gambar 1. Diagram Blok FOC
Decoupled
Motor Induksi ( Ari, 2002) Transformasi Clarke dan Part FOCTransformasi Clarke didalam
field oriented control
motor induksi digunakan untuk mentransformasikan arus stator tiga fasa (ia, ib, dan ic) pada bidang stasioner(
stationary reference frame
) ke arus stator ortogonal dua fasa (i dan i) pada bidangortogonal (
orthogonal reference frame
). Sedangkan Transformasi Part digunakan untuk mentransformasikan arus stator (i dan i) ke arus stator dua fasa (ids dan iqs) padabidang putar (
rotating reference frame
).Direct Torque Control
(DTC)Direct Torque Control
(DTC) merupakan suatu teknik kontrol yang lebihmengarah pada pengaturan dengan torsi yang berubah – ubah sesuai kebutuhan beban pada motor khususnya motor induksi. Secara umum prinsip dari metode DTC adalah memilih satu dari enam vektor egangan inverter dan dua diantaranya adalah vektor nol( Endro dkk, 2009 ). Metode DTC adalah suatu metode yang digunakan dalam
variable frequency drive
untuk mengontrol torsi dan kecepatan pada motor induksi tiga fasa. Metode ini meliputi perhitungan estimasi fluks dan torsi motor berdasarkan tegangan dan arus pada motor. Fluks stator diestimasi berdasarkan tegangan stator. Torsi diestimasi dari estimator vektor fluks stator dan arus motor. Magnitude fluks dan torsi yang diestimasi kemudian dibandingkan dengan nilai referensinya.Gambar 2.
Direct Torque Control
(DTC) pada Motor Induksi)
t
sin(
)
t
cos(
e e r
i
i
i
*cs * bs * as
s q r s d r
s q s s d si
i
*ds * qsPers.
(2.28)
&
(2.29)
Pers.
(2.28)
&
(2.29)
FOC
Decoupled
FOC
Decoupled
Rotor Flux
Position and
Amplitude
Calculator
Rotor Flux
Position and
Amplitude
Calculator
DTC ini terdiri dari empat bagian utama, yaitu
VoltageSource Inverter
(VSI), fluks stator dan torsiestimator, table switching
sertahysterisis
fluks dan torque estimator.Hysterisis band controller
akan menentukanswitchingvector
untuk mengurangi errorfluk stator dan torsi menuju nol (Endro dkk, 2009).Adaptive fuzzy
Adaptif fuzzy Sistem kendali logika adaptif fuzzy akan mengubah dan menyesuaikan parameter kendali secara otomatis sesuai dengan kelakuan sistem yang dikehendaki ( Wang Xin-Li, 1997). Sistem adaptif fuzzy dapat dipandang sebagai sistem logika fuzzy yang memiliki kemampuan membangkitkan aturan-aturan (rule) secara otomatis melalui pembelajaran.Salah satu algoritma pembelajaran yang dapat digunakan yaitu pembelajaran dengan gradient descent yang disebut juga dengan error backpropagation (Wang XiLin, 1997). Sistem logika fuzzy yang akan digunakan yaitu fuzzyfikasi singleton, defuzzyfikasi rata-rata tengah (center average defuzzifier),dan fungsi keanggotaan gaussian, sehingga keluaranadaptif fuzzy dapat dinyatakan dalambentuk pers. (1)
Parameter yang dapat diubah dari sistem logika fuzzy di atas yaitu :
Dimana V adalah semesta pembicaraan pada keluaran sedangkan Ui adalahsemesta pembicaraan pada masing-masing masukannya.M adalah banyaknya fungsi keanggotaan fuzzy dan N adalah banyaknya masukan sedangkan F(x) adalah sinyal keluaran jaringan fuzzy. Variabel l i x dan σi l masing-masing adalah parameter titik tengah dan lebar fungsi keanggotaan masukan Gaussian, sedangkan titik titik tengah fungsi keanggotaan keluarannya adalah yl . Diasumsikan l i a = 1 karena harga dari fungsi keanggotaan maksimum berharga 1.
METODE PENELITIAN Diagram Blok Sistem
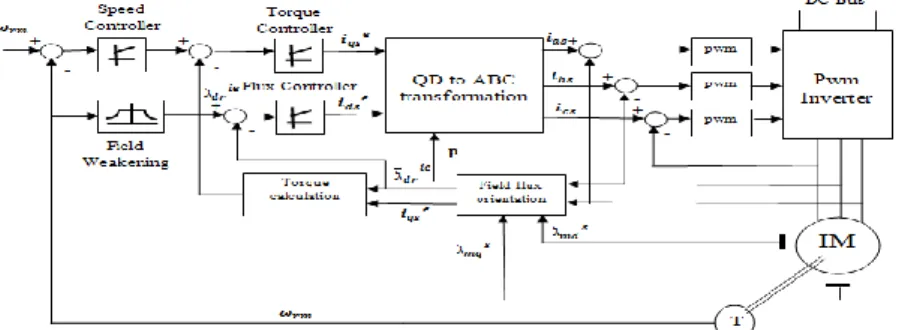
Gambar dibawah ini merupakan blok diagram secara keseluruhan sistem yang dibuat pada penelitian ini.
Gambar 3. Blok Diagram Pengaturan Kecepatan Motor Menggunakan Metode Direct Torque Control
Perancangan Simulasi Sistem
Perancangan simulasi ini terdiri dari beberapa bagian yaitu perancangan pemodelan motor induksi tiga fasa,
direct field orientation methods
dan kontrollerAdaptive Fuzzy
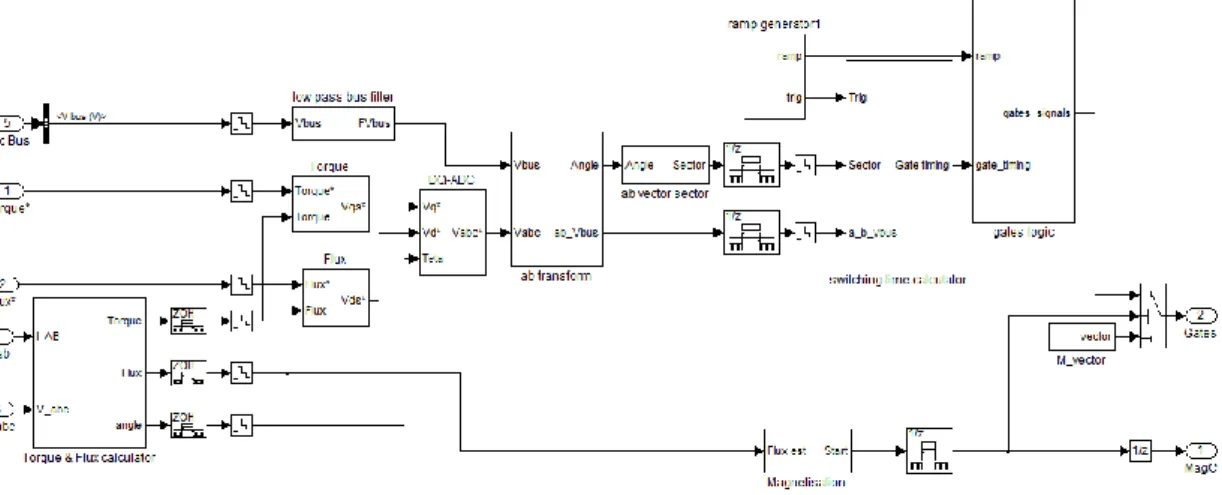
.Gambar 4. Pemodelan Motor Induksi Tiga Fasa Dengan
Direct Torque Control
.Perancangan Kontroler Logika
AdaptiveFuzzy
Pada penelitian ini menggunakan
fuzzy logic controller
untuk mengatur kecepatan motor induksi dan mengatasi perubahan torsi beban. Telah banyak dikembangkan algoritma untuk inverter ini diantaranya adalahswitching
inverter dimana keluaran dari inverter ini adalah tegangan maksimal, min atau nol saja sehingga respon kecepatan terhadapsetpoint
terdapatripple
. Dalam penelitian ini akan dikembangkan inverter jenis sumber tegangan (voltage source inverter
) dengan menggunakan kontroler logikafuzzy
sebagai algoritmaswitching
dari inverter. Penggunaan kontroler logikafuzzy
dapat memperbaiki respon dari motor induksi. DiagramSimulink
kontrolerfuzzy
yang digunakan untuk penelitian ini ditunjukkan pada gambar 5.Gambar 5. Diagram
simulink
kontroler logikafuzzy
HASIL DAN PEMBAHASAN
Berikut di bawah ini hasil simulasi menggunakan kontroler Adaptive Fuzzy dan konvensional sebagai pembanding, dengan melakukan percobaan pada beberapa keadaan yang berbeda-beda mengubah nilai beban, speed referensi dari system.
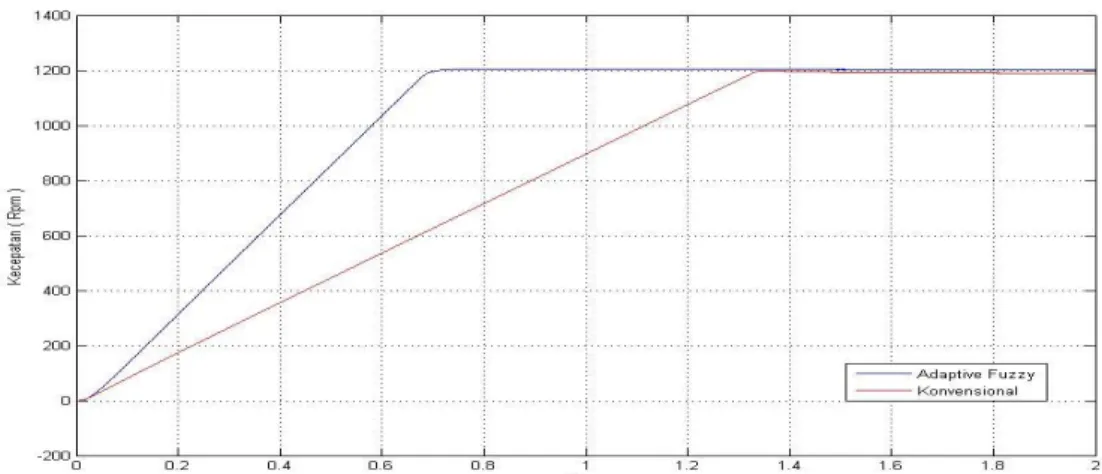
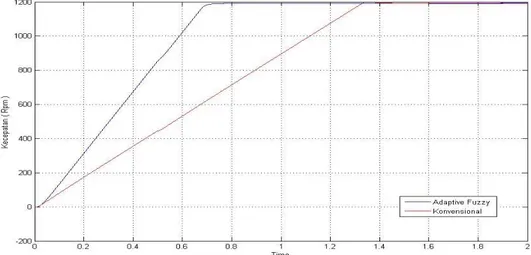
Simulasi Respon Kecepatan A. Speed referensi 1200 Rpm
Gambar 6. Perbandingan Respon Kecepatan Kontroller PI dan Adaptive Fuzzy Pada Kecepatan 1200 Rpm.
Pada gambar 6 menunjukkan bahwa hasil dari Kontroller Adaptive Fuzzy lebih baik di banding PI.Pada saat starting awal speed referensi yg di inputkan ialah 1200 dan terbukti kontroller Adaptive bisa mendahului di waktu 0.7 detik, kemudian untuk kontroller PI hanya mampu di kecepatan 1190 pada waktu 1.3 detik.
B. Speed referensi 1000 Rpm
Gambar 7. Perbandingan Respon Kecepatan Kontroller PI dan Adaptive Fuzzy Pada Kecepatan 1000 Rpm.
Pada gambar 7 menunjukkan bahwa hasil dari Kontroller Adaptive Fuzzy lebih baik di banding PI.Pada saat starting awal speed referensi yg di inputkan ialah 1000 dan terbukti kontroller Adaptive bisa mendahului di waktu 0.6 detik, kemudian untuk kontroller PI hanya mampu di kecepatan 965 pada waktu 1.2 detik.
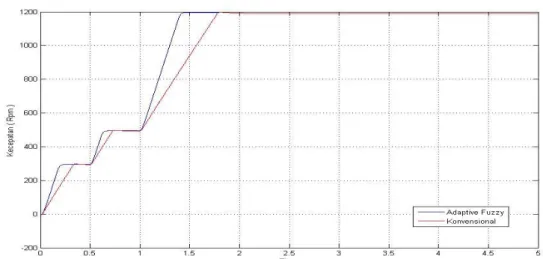
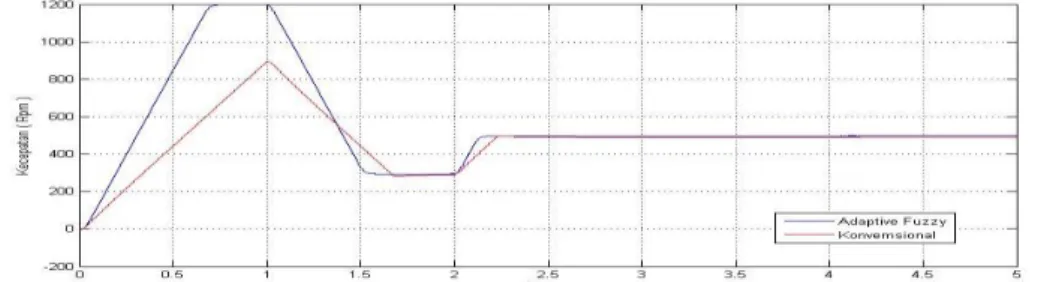
C. Speed referensi 300, 500, 1200 Rpm Tanpa Beban.
Gambar 8. Perbandingan Respon Kecepatan Kontroller PI dan Adaptive Fuzzy Pada Kecepatan 300, 500, 1200 Rpm Tanpa Beban.
Pada gambar 8 menunjukkan bahwa hasil dari Kontroller Adaptive Fuzzy lebih baik di banding PI.Pada saat starting awal speed referensi yg di inputkan ialah 300, 500, dan 1200.Terbukti kontroller Adaptive bisa mendahului di waktu 0.3 detik untuk kecepatan 500, lanjut kecepatan meningkat menjadi 1000 pada waktu 1,3 detik, setelah itu kecepatan meningkat lagi menjadi 1190 pada waktu 2,2 detik dan pada akhirnya menunjukan
steady state di kecepatan
1180. Kemudian untuk kontroller PI hanya mampu di kecepatan 460 pada waktu 0.6 detik.Lalu kecepatan meningkat menjadi 980 pada waktu 1,6 detik, setelah itu kecepatan meningkat lagi menjadi 1185 pada waktu 2,4 detik dan pada akhirnya menunjukansteady state di kecepatan
1200. Pengujian Simulasi Respon Kecepatan dengan Torsi Beban TetapPengujian berikutnya adalah pengujian dengan memberikan torsi beban (TL) tetap pada pengujian ini akan diberikan tetap sebesar 20Nm dan sistem harus bisa mempertahankan kecepatan sesuai dengan sinyal referensi yang diberikan. Pada pengujian ini akan diberikan sinyal referensi konstan 1200rpm.
Terlihat bahwa keluaran berupa kecepatan putaran rotorterjadi penurunan kecepatan pada daerah keadaan tunak (
steady state
).Respon kecepatan pada daerah keadaan tunak dengan torsi beban tetap dapat dilihat pada gambar 9.kemudian dibuat perbandingan kesalahan keadaan tunak terhadap perubahan torsi beban (TL) yang ditunjukan pada Table 4.1.Tabel 1. Perbandingan kesalahan dengan beban tetap
Speed Referensi
(1200 rpm) TL (Nm)Error
(%)Kontroler logika Adaptive
fuzzy
20 0.05Kontroller PI 20 0.1
Pengujian Simulasi Respon Kecepatan dengan Torsi Beban Variasi
Pengujian berikutnya adalah pengujian dengan memberikan torsi beban (TL) variasi.Pada pengujian ini akan diberikan beban sebesar 10, 30, 60Nm dan sistem harus bisa mempertahankan kecepatan sesuai dengan sinyal referensi yang diberikan. Pada pengujian ini akan diberikan sinyal referensi variasi1200, 500, 1000 rpm.
Gambar 10. Perbandingan Respon Kecepatan Kontroller PI dan Adaptive Fuzzy Berbeban Variasi.
Pada gambar 10. menunjukkan bahwa hasil dari Kontroller Adaptive Fuzzy lebih baik di banding PI.Pada saat starting awal speed referensi yg di inputkan ialah 1200, 500, dan 1000. Kontroller Adaptive ketika di beri beban variasi hanya mampu mencapai di kecepatan 1185 rpm pada waktu 0.6 detik untuk kecepatan 500 mengalami penurunan dahulu sebelum mencapai kecepatan 500. lanjut kecepatan meningkat menjadi 990 rpm pada waktu 2,7 detik.
Pengujian Respon Kecepaatan Pada Kondisi Berbeban sesaat A. Pemberian beban sesaat
Pengujian Simulasi Respon Kecepatan dengan Torsi Beban Tetap
Pengujian berikutnya adalah pengujian dengan memberikan torsi beban (TL) tetap pada pengujian ini akan diberikan tetap sebesar 20Nm dan sistem harus bisa mempertahankan kecepatan sesuai dengan sinyal referensi yang diberikan. Pada pengujian ini akan diberikan sinyal referensi konstan 1200rpm.
Gambar 12. Respon kecepatan dengan beban tetap sebesar 20Nm
Terlihat bahwa keluaran berupa kecepatan putaran rotor dapat mengikuti sinyal referensi yang diberikan walaupun masih terjadi penurunan kecepatan pada daerah keadaan tunak (
steady state
).Respon kecepatan pada daerah keadaan tunak dengan torsi beban tetap dapat dilihat pada gambar 12 kemudian dibuat perbandingan kesalahan keadaan tunak terhadap perubahan torsi beban.Pengujian Simulasi Respon Kecepatan Hingga Mencapai Beban Maksimal Pengujian berikutnya adalah pengujian dengan memberikan torsi beban
bertingkat.Pada pengujian ini akan diberikan beban bertingkat sebesar , 200 Nm, 225 Nm, 230 Nm. Dan sistem harus bisa mempertahankan kecepatan sesuai dengan sinyal referensi yang diberikan. Pada pengujian ini akan diberikan sinyal referensi konstan 500rpm.
A. Pemberian beban 220 Nm pada Referensi Konstan 500 Rpm
Gambar 13. Respon kecepatan pemberian beban 200 Nm pada referensi konstan 500 Rpm
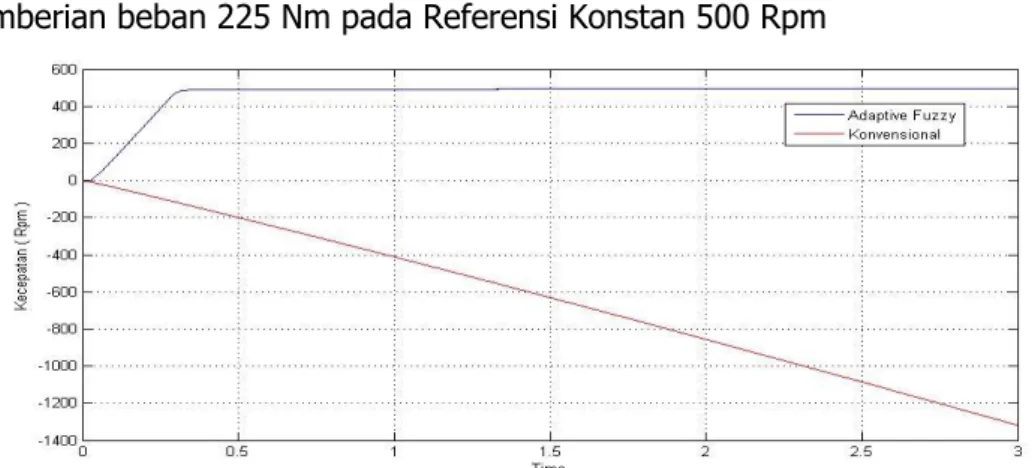
. B. Pemberian beban 225 Nm pada Referensi Konstan 500 Rpm
Gambar 14. Respon kecepatan pemberian beban 225 Nm pada referensi konstan 500 Rpm
. C. Pemberian beban 230 Nm pada Referensi Konstan 500 Rpm
Gambar 15. Respon kecepatan pemberian beban 230 Nm pada referensi konstan 500 Rpm
KESIMPULAN
Dari hasil pengujian simulasi kecepatan motor induksi terhadap perubahan setpoint hingga mencapai titik maksimum, yaitu 1200 rpm seperti ditampilkan pada lampiran, dapat kita simpulkan bahwa kontrol logika Adaptive Fuzzy yang dikembangkan ini memiliki kemampuan mengontrol terhadap perubahan kecepatan dengan baik, waktu pencapaian settling time relative cepat dibandingkan dengan konvensional. Dari respon kecepatan motor induksi berbeban sesaat, seperti yang terlihat bahwa kontrol kecerdasan Adaptive Fuzzy memiliki kemampuan mengatasi perubahan torsi beban secara tiba-tiba, dengan waktu pemilihan (
restore time
) kembali relatif cepat, serta error kecepatan mendekati nol.Sedangkan hasil simulasi bertujuan untuk menguji ketangguhan sistem kontrol yang dirancang terhadap kondisi pembebanan secara permanen (tetap). Dalam hal ini, kondisi beban yang diamati dan dianalisis adalah respon sistem pada saat torsi beban sebesar 220NM, 225 Nm, dan 230 Nm dengan respon kecepatan yang digunakan 1800 rpm. Dari hasil yang ditampilkan pada gambar beban permanen, kita dapat melihat respon system tetap setabil dengan adanya pergantian beban yang bervariasi.DAFTAR PUSTAKA
[1] Nugraha, Ikhsan. 2011. “Prinsip Kerja Motor Induksi”, http://icannugraha.blogspot.com/2011/08/prinsip-kerja-motor-induksi.html,
(Diakses 21 Agustus 2014).
[2] Dewantara, Belly Yan. 2014. “DesainSvpwm
Inverter Sebagai DriverPpengendali
Kecepatan
Motor Induksi Tiga Fasa Berbasis Fuzzy Logic Controller.. Teknik elektro
Universitas Hang Tuah Surabaya.
[3] Kusumo, Ari. 2002. “Pengaturan Kecepatan Motor Induksu Tiga Fasa dengan Metode
Field-Oriented Control
menggunakan Kontroler LogikaFuzzy”.
Skripsi:Surabaya.
[4] H. Soebagio, Peran Pengemudian Dalam Menghadapi Kompetisi Global, Departemen Pendidikan Nasional Institut teknologi Sepuluh November Surabaya, 2003.
[5] Son Kuswadi, Kendali Cerdas, EEPIS Press, 2003.
[6] B.K. Bose, Power Electronics And AC Driver, Prentice Hall New Jersey, 1986.
[7] .W. Novontny And T.A. Lipo, Vector Control And Dynamic Of AC Driver, Clarendon Press-Oxford, 1996.
[8] Chee-Mung Ong, Dynamic Simulation of Electric Machinery, Prentice Hall PTR, 1997.
[9] Ari Dwi Susanto, Tugas Akhir Judul Aplikasi Kontrol Logika Fuzzy Dalam Pengaturan Kecepatan Motor Induksi Tiga Fasa, Fakultas Teknik Universitas Hang Tuah, Surabaya, 2004.