STUDI PENGONTROL TEMPERATUR MOTOR DC UNTUK MEMPERTAHANKAN KESTABILAN KECEPATAN MOTOR BERBASIS
MIKROKONTROLER AT89S52 SKRIPSI
Diajukan untuk melengkapi tugas dan memenuhi syarat mencapai gelar Sarjana Sains
ABDULLAH
050801022DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATERA UTARA
PERSETUJUAN
Judul : STUDI PENGONTROL
TEMPERATUR MOTOR DC UNTUK
MEMPERTAHANKAN KESTABILAN
KECEPATAN MOTOR BERBASIS
MIKROKONTROLER AT89S52
Kategori : SKRIPSI
Nama : ABDULLAH
Nomor Induk Mahasiswa : 050801022
Program Studi : SARJANA (S1) FISIKA
Departemen : FISIKA
Fakultas : MATEMATIKA DAN ILMU PENGETAHUAN
ALAM (FMIPA) UNIVERSITAS SUMATERA UTARA
Diluluskan di Medan,
Diketahui/Disetujui oleh Pembimbing
Departemen Fisika FMIPA USU Ketua
DR. Marhaposan Situmorang DR. Marhaposan Situmorang NIP : 195510301980031003 NIP : 195510301980031003
PERNYATAAN
STUDI PENGONTROL TEMPERATUR MOTOR DC UNTUK
MEMPERTAHANKAN KESTABILAN KECEPATAN MOTOR BERBASIS MIKROKONTROLER AT89S52
SKRIPSI
Saya mengaku bahwa skripsi ini adalah hasil kerja saya sendiri, kecuali beberapa kutipan dan ringkasan yang masing-masing disebutkan sumbernya
Medan,
ABDULLAH 050801022
PENGHARGAAN
Segala puji dan syukur penulis panjatkan kepada Allah SWT yang maha pemurah dan maha penyayang, dengan limpahan karunia-Nya sehingga skripsi ini berhasil diselesaikan dalam waktu yang ditetapkan.
Ucapan banyak terimakasih saya sampaikan kepada Bpk DR. Marhaposan Situmorang , selaku ketua Departemen Fisika FMIPA USU dan pembimbing yang telah banyak membimbing dan memberi masukan serta koreksi kepada penulis dalam penyelesaian skripsi ini. Ucapan terimakasih juga saya ajukan kepada Bpk Drs.Takdir Tamba M.Eng,Sc, Bpk Drs. Nasruddin M.Eng.Sc dan Bpk Drs. Bisman P, M.Eng.Sc, selaku dosen pembanding yang banyak memberikan masukan.Ucapan terimakasih juga saya ajukan kepada Bpk Drs.Luhut Sihombing MS selaku dosen wali selama mengikuti perkuliahan dan terimakasih banyak juga kepada Ibu Dra. Yustinon,MS, Dekan dan Pembantu Dekan FMIPA Universitas Sumatera Utara, serta semua dosen dan Staf pada Departemen Fisika FMIPA USU. Teman temanku Gilang, Oki, Masthura dan rekan-rekan fisika semuanya khususnya Stambuk’05 terima kasih atas semangat, bantuan dan motivasinya..
Akhirnya tidak terlupakan dan yang teristimewa kepada Ayahanda Azharruddin, Ibunda Siti Ainun, Kakak-kakak ku Umi dan Erni. Terima kasih atas dukungan, bantuan dan semangat yang kalian berikan kepadaku selama ini. Semoga Allah SWT akan membalasnya.
ABSTRAK
Telah dirancang sebuah alat pengukuran dan pengontrolan yang mampu mengukur kecepatan putar dan temperatur motor dc serta mengontrol temperatur motor dengan menggunakan dua kipas yang diaktifkan secara otomatis, untuk mempertahankan kestabilan kecepatan putar dari sebuah motor dc. Sensor yang digunakan untuk mendeteksi kecepatan putar dalam penelitian ini adalah sensor Optocoupler dan sensor yang digunakan untuk mengukur dan mengontrol temperatur motor dc adalah sensor LM35. Sementara yang menjadi pusat pengendalian dari seluruh alat ini digunakan mikrokontroler AT89S52, keseluruhan bagian dari alat ini merupakan gabungan dari empat buah blok dasar yaitu sensor Optocoupler, sensor LM 35, ADC dan mikrokontroller. Alat ini juga memiliki ketelitian yang cukup baik dalam hal mengukur dengan kesalahan sebesar 0,498 % (kecepatan putar) dan 0,841 % (temperatur). Adapun kelemahan dari perancangan ini adalah alat ini hanya mampu mengukur kecepatan putar dan temperatur motor dc serta mengontrol temperatur motor dc, suhu yang dapat diukur dari -55 ºC sampai +150 ºC (sesuai jangkauan maksimal sensor suhu LM35).
ABSTRACT
Had designed a control and measuring instrument who can measure rotation speed and temperature from a dc motor and also control temperature from a dc motor with use two fans who actived otomaticly for defend dc motor rotation speed stability. The sensor was used for detecting speed rotation in this research is Optocoupler sensor and the sensor was used for measuring and control dc motor temperatur is LM 35 sensor. And the main of control from all system is microcontroller type AT89S52. All the part from this research instrument are stand of from four basic of block that is Optocoupler sensor, LM35 sensor, ADC, and microcontroller. The instrument also have good carefullness in measuring with 0,498% error (speed rotation) and 0,841%
error (temperature). The weakness of this instrument is instrument just can measure dan control rotation speed and temperature from a dc motor. Temperature who can be measured from -55 ºC to +150 ºC (from max range LM35 temperature sensor).
DAFTAR ISI
Bab 2 Tinjauan Pustaka
2.1 Motor 5
2.5 ADC (Analog to Digital Converter) 16
Bab 3 Perancangan Dan Kerja Alat
3.1 Diagram Balok 30
3.1.1 Flowchart 32
3.2 Sensor Optocoupler 33
3.3 Sensor LM 35 35
3.4 Rangkaian ADC 35
3.5 Rangkaian Mikrokontroler AT89S52 37
3.6 Rangkaian Relay 38
3.7 Display LCD Character 2x16 39
3.8 Teknik analisa data 42
Bab 4 Hasil dan Pembahasan
4.1 Pengujian Rangkaian Mikrokontroller AT89S52 45
4.2 Interfacing LCD 2x16 47
4.3 Pengujian Rangkaian ADC ( Analog to Digital Converter ) 49
4.4 Pengujian Sensor LM 35 52
4.5 Pengujian Rangkaian Relay 55
4.6 Hasil Pengukuran Alat 56
4.6.1 Pengukuran kecepatan putar (rps) 56 4.6.2 Pengukuran temperatur(oC) 59
4.7 Analisa Ketelitian Alat 59
4.8 Hasil Pengontrolan Alat 63
Bab 5 Kesimpulan dan Saran
5.1 Kesimpulan 69
5.2 Saran 69
Daftar Pustaka 70
Lampiran
DAFTAR TABEL
Halaman
Tabel 2.1 Fungsi Khusus Port 3 21
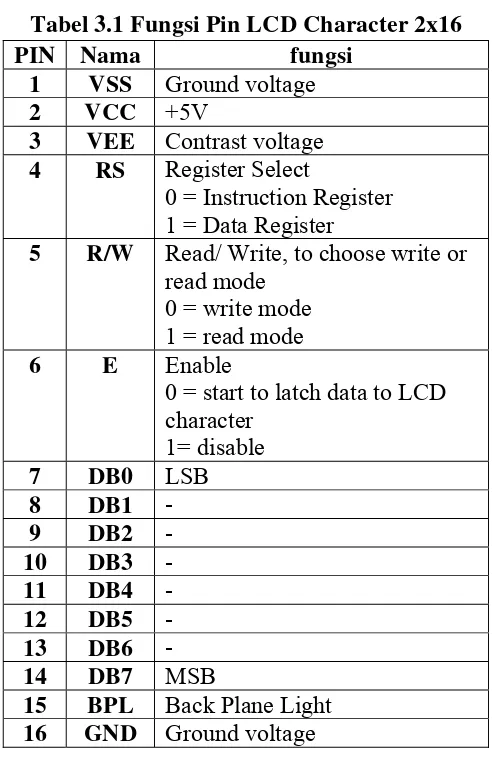
Tabel 3.1 Fungsi Pin LCD Character 2x16 41
Tabel 3.2 Pengamatan Nilai Kecepatan Putar Pada Motor DC 45 Tabel 3.3 Pengamatan Perbandingan Nilai Kecepatan Putar Alat Rancangan 45
Dengan Nilai Kecepatan Putar Menggunakan Multimeter
Tabel 3.4 Pengamatan Perbandingan Nilai Temperatur Yang Terukur Pada Alat 46 Dengan Temperatur Yang Terukur Pada Termometer
Tabel 3.5 Pengamatan Tegangan, Suhu, Kecepatan Putar Serta Keadaan Kipas 46
Tabel 4.1 Data Hasil Pengujian ADC 54
Tabel 4.2 Data Konversi ke Bilangan Digital dari Output Sensor 56
Tabel 4.3 Pengukuran Kecepatan Putar 61
Tabel 4.4 Pengukuran Temperatur 62
Tabel 4.5 Penyimpangan Dan % Kesalahan Pada Pengukuran Kecepatan Putar 63 Motor DC
Tabel 4.6 Penyimpangan dan % kesalahan pada pengukuran suhu 64
Tabel 4.7 Data Pengontrolan Motor 66
Tabel 4.8 Data Pengontrolan Motor 68
Tabel 4.9 Data Pengontrolan Motor 70
DAFTAR GAMBAR
(b) Bentuk Fisik Optocoupler
Gambar 2.5 LED Inframerah 10
Gambar 2.6 Fototransistor 11
Gambar 2.7 (a) Bentuk Fisik Sensor LM35 13
(b) Konfigurasi Pin LM35 Dilihat Dari Bagian Bawah (c) Spesifikasi Sensor LM35
Gambar 2.8 Karakteristik Sensor LM35 13
Gambar 2.9 Konfigurasi Pin IC ADC 0804 16
Gambar 2.10 Diagram ADC Secara Umum 17
Gambar 2.11 Blok Diagram Fungsional AT89S52 19
Gambar 2.12 Konfigurasi Pin AT89S52 20
Gambar 2.13 Tampilan M-IDE Studio MCS 51 sebagai 8051 Editor Menulis 26 Program
Gambar 2.14 ISP- Flash Programmer 3.a 27
Gambar 2.15 Diagram blok Tampilan Kristal cair (LCD) 28
Gambar 2.16 Relay 29
Gambar 2.17 Susunan Relay Sederhana 29
Gambar 3.1 Diagram Blok Rangkaian 31
Gambar 3.2 Rangkaian Penguat Sinyal Optocoupler 35 Gambar 3.3 Penempatan Posisi Optocoupler Pada Piringan 35
Gambar 3.4 Sensor LM35 36
Gambar 3.5 Rangkaian ADC 37
Gambar 3.6 Rangkaian Skematik Sistem Minimum Mikrokontroler AT89S52 38
Gambar 3.7 Rangkaian Relay Pengendali Kipas 39
Gambar 3.8 LCD Character 2x16 41
Gambar 3.9 Peta memory LCD character 2x16 44
Gambar 4.1 Pengujian Rangkaian Mikrokontroller AT89S52 48 Gambar 4.2 Interfacing LCD 2x16 Dengan Mikrokontroller AT89S52 50
Gambar 4.3 Rangkaian Pengujian ADC 0804 53
Gambar 4.4 Rangkaian Pengujian Sensor 50
Gambar 4.5 Pengukuran Sensor Kecepatan Putar Menggunakan Multimeter 60
DAFTAR GRAFIK
Halaman
Grafik 4.1 Hubungan Data Out ADC Dengan Tegangan Input 54 Grafik 4.2 Hubungan Output LM35 Dengan Temperatur 57 Grafik 4.3 Hubungan Tegangan Dengan Kec.Putar Yang Tedrukur Pada Alat 61
& Kecepatan Putar Yang Terukur Pada Multimeter
Grafik 4.4 Hubungan Antara Waktu Dan Temperatur 66 Grafik 4.5 Hubungan Antara Temperatur Dan Kecepatan Putar Motor dc 67 Grafik 4.6 Hubungan Antara waktu Dan Temperatur Motor 68 Grafik 4.7 Hubungan Antara Temperatur Dan Kecepatan Putar Motor dc 69 Grafik 4.8 Hubungan Antara Waktu Dan Temperatur Motor 71 Grafik 4.9 Hubungan Antara Temperatur Dan Kecepatan Putar Motor dc 71
ABSTRAK
Telah dirancang sebuah alat pengukuran dan pengontrolan yang mampu mengukur kecepatan putar dan temperatur motor dc serta mengontrol temperatur motor dengan menggunakan dua kipas yang diaktifkan secara otomatis, untuk mempertahankan kestabilan kecepatan putar dari sebuah motor dc. Sensor yang digunakan untuk mendeteksi kecepatan putar dalam penelitian ini adalah sensor Optocoupler dan sensor yang digunakan untuk mengukur dan mengontrol temperatur motor dc adalah sensor LM35. Sementara yang menjadi pusat pengendalian dari seluruh alat ini digunakan mikrokontroler AT89S52, keseluruhan bagian dari alat ini merupakan gabungan dari empat buah blok dasar yaitu sensor Optocoupler, sensor LM 35, ADC dan mikrokontroller. Alat ini juga memiliki ketelitian yang cukup baik dalam hal mengukur dengan kesalahan sebesar 0,498 % (kecepatan putar) dan 0,841 % (temperatur). Adapun kelemahan dari perancangan ini adalah alat ini hanya mampu mengukur kecepatan putar dan temperatur motor dc serta mengontrol temperatur motor dc, suhu yang dapat diukur dari -55 ºC sampai +150 ºC (sesuai jangkauan maksimal sensor suhu LM35).
ABSTRACT
Had designed a control and measuring instrument who can measure rotation speed and temperature from a dc motor and also control temperature from a dc motor with use two fans who actived otomaticly for defend dc motor rotation speed stability. The sensor was used for detecting speed rotation in this research is Optocoupler sensor and the sensor was used for measuring and control dc motor temperatur is LM 35 sensor. And the main of control from all system is microcontroller type AT89S52. All the part from this research instrument are stand of from four basic of block that is Optocoupler sensor, LM35 sensor, ADC, and microcontroller. The instrument also have good carefullness in measuring with 0,498% error (speed rotation) and 0,841%
error (temperature). The weakness of this instrument is instrument just can measure dan control rotation speed and temperature from a dc motor. Temperature who can be measured from -55 ºC to +150 ºC (from max range LM35 temperature sensor).
BAB I
PENDAHULUAN
1.1.LATAR BELAKANG
Motor arus searah (motor dc) telah ada selama lebih dari seabad, semenjak
Hans Christian Oersted (1777-1851 orang Denmark) menemukan adanya medan
magnet disekitar arus listrik. Motor merupakan sebuah perangkat elektromagnetis
yang mengubah energi listrik menjadi energi mekanik. Energi mekanik inilah yang
digunakan misalnya, memutar fan atau blower, menggerakan kompresor, mengangkat
bahan, dan lain-lain. Motor digunakan juga di rumah seperti menggerakkan mixer, bor
listrik, fan angin, bahkan sebagian besar mainan anak-anak pun menggunakan motor.
Di industri motor disebut “kuda kerja” nya industri sebab diperkirakan bahwa motor
menggunakan sekitar 70% beban listrik total di industri, tetapi kebanyakan alat-alat
tersebut tidak dapat bertahan lama, karena sifat dari motor adalah apabila motor
beroperasi secara terus menerus maka temperatur dari motor juga akan terus
meningkat. Apabila motor telah mencapai temperatur yang tinggi dan motor terus
digunakan maka akan membuat kinerja kecepatan motor akan menurun dan tidak
efektif lagi serta dapat menimbulkan kerusakan.
Sudah tentu hal itu akan sangat merugikan manusia apabila alat tersebut rusak
dan membutuhkan biaya yang mahal untuk memperbaikinya atau rusak dan terbuang
sia-sia. Oleh sebab itu diperlukan suatu cara yang dapat mengontrol kecepatan putar
dan temperatur motor dc dengan baik agar motor dapat beroperasi lebih lama dan
dapat bekerja secara efektif serta tanpa harus takut motor tersebut kecepatannya
menurun dan panas atau bekerja pada temperatur yang tinggi
Berdasarkan sifat motor dc ini maka penulis mencoba merancang suatu alat
dua buah kipas dengan sistem otomatis, sistem ini dimaksudkan untuk mengontrol
suhu motor agar tetap stabil sehingga tidak mengganggu kecepatan putar motor
(kecepatan motor juga stabil). Disaat suhu mulai naik maka kipas akan beropersi
untuk mempertahankan suhu yang diinginkan dan kipas akan berhenti beroperasi
setelah mencapai suhu yang diinginkan.
Dengan demikian diharapkan penelitian ini dapat bermanfaat, karena akhir dari
penelitian ini nantinya akan menghasilkan suatu alat pengukuran dan pengontrolan
motor dc agar penggunaan motor dapat dikontrol dengan baik, beroperasi lebih lama
dan bekerja secara efektif tanpa harus takut terjadinya kerusakan pada motor.
1.2. BATASAN MASALAH
Adapun batasan masalah yang akan dibahas dalam penelitian ini adalah :
1. Penelitian ini difokuskan pada alat yang mampu mengukur dan mengontrol
kecepatan putar dan temperatur motor dc secara otomatis.
2. Mikrokontroler yang digunakan adalah jenis AT89S52.
3. Sensor kecepatan putar yang digunakan adalah sensor optocoupler.
4. Sensor suhu yang digunakan sensor LM 35.
5. Motor yang digunakan adalah jenis motor dc 12 volt tanpa beban.
6. Untuk menampilkan kecepatan putar dan temperatur motor dc digunakan LCD
2x16.
1.3 TUJUAN PENULISAN
Adapun tujuan dari penelitian ini adalah:
1. Studi terhadap suatu alat yang dapat mengontrol temperatur motor dc untuk
mempertahankan kestabilan motor dc berbasis mikrokontroler AT89S52.
2. Untuk mengetahui pengaruh temperatur dengan kecepatan putar motor.
3. Untuk mengetahui keefektifan sistem pengontrolan temperatur motor dc untuk
mempertahankan kestabilan kecepatan putar motor.
4. Untuk mengetahui keefektifan sensor LM35 dalam mengukur suhu dan sensor
1.4. MANFAAT PENELITIAN
Manfaat yang diharapkan dari penelitian ini adalah:
1. Meningkatkan pemahaman terhadap karakteristik sensor kecepatan putar
Optocoupler dan sensor suhu LM35, ADC dan memperluas aplikasi
mikrokontroler.
2. Sebagai informasi bagaimana dasar membangun sebuah instrumen yang
mampu mengukur dan mengontrol motor dc.
3. Mempermudah dalam hal pengukuran kecepatan putar dan temperatur motor
dc serta pengontrolan temperatur pada motor dc.
1.6. TEMPAT PENELITIAN
LABORATORIUM INSTRUMENTASI DIGITAL FMIPA USU, MEDAN.
1.7. SISTEMATIKA PENULISAN
Untuk mempermudah pembahasan dan pemahaman maka penulis membuat
sistematika pembahasan bagaimana sebenarnya prinsip kerja dari alat pengontrol
kecepatan putar dan temperatur motor dc berbasis mikrokontroller AT89S52, maka
penulis menulis laporan ini dengan sistematika penulisan sebagai berikut:
BAB I. PENDAHULUAN
Dalam bab ini berisikan mengenai latar belakang, rumusan masalah, tujuan
penulisan, batasan masalah, manfaat penelitian serta sistematika penulisan.
BAB II. LANDASAN TEORI
Dalam bab ini dijelaskan tentang teori pendukung yang digunakan untuk
pembahasan. Teori pendukung itu antara lain tentang motor, motor dc, sensor
optocoupler, sensor LM 35, mikrokontroler AT89S52 (hardware dan software),
ADC 0804, LCD, relay, serta cara kerja dari sensor optocoupler, sensor LM 35,
BAB III. PERANCANGAN ALAT DAN PROGRAM
Pada bagian ini akan dibahas perancangan dari alat, yaitu diagram blok dari
rangkaian, skematik dan system kerja dari masing-masing rangkaian, bahasa
program yang digunakan, dan program yang akan diisikan ke mikrokontroler
AT89S52.
BAB IV. ANALISA RANGKAIAN DAN SISTEM KERJA ALAT
Pada bab ini akan dibahas hasil analisa dari rangkaian dan sistem kerja alat,
penjelasan mengenai program-program yang digunakan untuk mengaktipkan
rangkaian, dan penjelasan mengenai program yang diisikan ke mikrokontroler
AT89S52.
BAB V. KESIMPULAN DAN SARAN
Bab ini merupakan penutup yang meliputi tentang kesimpulan dari
pembahasan yang dilakukan dari tugas akhir ini serta saran apakah
rangkaian ini dapat dibuat lebih efisien dan dikembangkan
perakitannya pada suatu metode lain yang mempunyai sistem kerja
BAB II
TINJAUAN PUSTAKA
2.1 Motor
Motor merupakan sebuah perangkat elektromagnetis yang mengubah energi
listrik menjadi energi mekanik. Energi mekanik inilah yang digunakan untuk berbagai
keperluan, misalnya menggerakkan pompa, menggerakan kompresor, mengangkat
bahan, dan lain-lain. Motor juga banyak digunakan untuk keperluan rumah seperti
menggerakkan mixer, bor listrik, kipas angin angin dan lain-lain. Di industri motor
bahkan disebut “kuda kerja” nya industri sebab diperkirakan bahwa motor-motor
menggunakan sekitar 70% beban listrik total di industri.
2.2 Motor DC
Motor arus searah (motor dc) adalah salah satu jenis motor yang telah ada
selama lebih dari seabad. Keberadaan motor dc telah membawa perubahan besar sejak
dikenalkan motor induksi yang nama lain dari motor listrik arus bolak balik (ac)
karena motor dc mempunyai keunggulan dalam kemudahan untuk mengatur dan
mengontrol kecepatan dibandingkan motor ac (motor bolak-balik yang bekerja
memerlukan suplay tegangan bolak balik ). Motor dc dapat berfungsi sebagai motor
apabila didalam motor listrik tersebut terjadi proses konversi dari energi listrik
menjadi energi mekanik. Motor dc itu sendiri memerlukan suplai tegangan yang
searah pada kumparan jangkar dan kumparan medan untuk diubah menjadi energi
mekanik. Pada motor dc kumparan medan disebut stator (bagian yang tidak berputar)
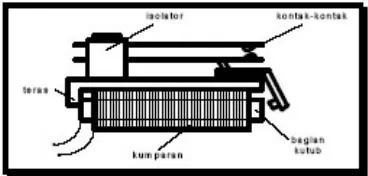
Gambar 2.1 Bagian – bagian Motor dc
Bagian – bagian motor dc secara umum, yaitu :
1. Badan Mesin
Badan mesin ini berfungsi sebagai tempat mengalirnya fluks magnet yang
dihasilkan kutub magnet, sehingga harus terbuat dari bahan ferromagnetik.
Fungsi lainnnya adalah untuk meletakkan alat-alat tertentu dan mengelilingi
bagian-bagian dari mesin, sehingga harus terbuat dari bahan yang benar-benar
kuat, seperti dari besi tuang dan plat campuran baja.
2. Inti kutub magnet dan belitan penguat magnet
Inti kutub magnet dan belitan penguat magnet ini berfungsi untuk
mengalirkan arus listrik agar dapat terjadi proses elektromagnetik. Adapun
aliran fluks magnet dari kutub utara melalui celah udara yang melewati badan
mesin.
3. Sikat-sikat
Sikat-sikat ini berfungsi sebagai jembatan bagi aliran arus jangkar dengan
bebas, dan juga memegang peranan penting untuk terjadinya proses komutasi.
4. Komutator
Komutator ini berfungsi sebagai penyearah mekanik yang akan dipakai
bersama-sama dengan sikat. Sikat-sikat ditempatkan sedemikian rupa sehingga
komutasi terjadi pada saat sisi kumparan berbeda.
5. Jangkar
Jangkar dibuat dari bahan ferromagnetik dengan maksud agar kumparan
jangkar terletak dalam daerah yang induksi magnetiknya besar, agar ggl
6. Belitan jangkar :
Belitan jangkar merupakan bagian yang terpenting pada mesin arus searah,
berfungsi untuk tempat timbulnya tenaga putar motor.
2.2.1. Jenis – Jenis Motor dc
Secara umum motor dc dibagi atas 2 (dua) macam, yaitu ;
1. Motor DC dengan sikat yang berfungsi sebagai pengubah arus pada
kumparan sedemikian rupa sehingga arah putaran motor akan selalu sama.
2. Motor DC tanpa sikat menggunakan semi konduktor untuk merubah
maupun membalik putarannya untuk menggerakkan motor, tingkat
kebisingan motor jenis ini rendah karena putarannya halus.
Hal-hal dasar yang dapat menurunkan efisiensi kerja motor dc:
1. Kelebihan supplay tegangan kerja dari batas maksimum motor dc
2. Pemanasan terhadap mesin sehingga akan menaikkan temperatur motor
3. Pembebanan diluar maksimum motor
4. Menurunkan efisiensi dari motor itu sendiri, biasanya karena proses
penggulungan ulang motor.
Sifat umum dari motor dc
Apabila motor beroperasi secara terus menerus maka temperatur dari motor
juga akan terus meningkat. Apabila motor telah mencapai temperatur yang tinggi dan
motor terus digunakan maka akan membuat kinerja kecepatan motor akan menurun
dan tidak efektif lagi serta dapat menimbulkan kerusakan.
Ini dapat dilihat pada hubungan resistansi pada kawat kumparan/lilitan motor
dengan temperatur , yaitu :
R = Ro ( 1+ α T )
Dimana :
R = Resistansi konduktor pada temperatur t
Ro = Resistansi konduktor pada suhu referensi
α = koefisien temperatur dari resistansi
Apabila temperatur kawat lilitan/kumparan pada motor semakin panas maka
akan menaikkan resistansi pada kawat tersebut, yang berarti naiknya resistansi pada
kawat meyebabkan penurunan arus pada motor. Penurunan arus inilah yang akan
menyebabkan adanya daya terdisipasi (energi yang hilang) menjadi panas. Karena
terjadinya kehilangan energi itulah yang menyebabkan pemanasan terhadap motor
sehingga akan menaikkan temperatur motor yang menurunkan efisiensi dari kerja
motor itu sendiri.
Pengaruh panas pada motor dc
Panas yang berlebihan akan menyebabkan penurunan kondisi atau kerusakan
pada motor , sehingga mengurangi umur pakai. Secara umum dikatakan bahwa setiap
penambahan temperatur 10 oC pada motor dengan waktu lama atau terus menerus,
mengakibatkan umur motor berkurang setengahnya.
Contoh:
Sebuah motor jika dioperasikan pada temperatur normal diperkirakan
mencapai umur 20 tahun. Tapi jika motor harus beroperasi 10 oC diatas normal, maka
umurnya menjadi 1/2 X 20 tahun. Jika motor harus beroperasi 40 oC diatas normal,
maka umurnya menjadi 1/16 x 20 tahun. Dari hasil survei, kerusakan pada motor 60 %
dikarenakan overheating.
Motor dc banyak sekali dipakai dalam kehidupan sehari-hari seperti pemutar
kaset, pemutar piringan magnetik di harddisk komputer, kipas pendingin komputer,
dan lain-lain bahkan mainan anak-anak menggunakan motor dc, sedangkan untuk
keperluan-keperluan yang berdaya besar, motor dc masih dipakai misalkan pada
elevator, conveyor yang digunakan dipabrik-pabrik.
2.2.2 Prinsip kerja Motor DC
Daerah kumparan medan yang yang dialiri arus listrik akan menghasilkan
medan magnet yang melingkupi kumparan jangkar dengan arah tertentu. Konversi
dari energi listrik menjadi energi mekanik (motor) maupun sebaliknya berlangsung
melalui medan magnet, dengan demikian medan magnet disini selain berfungsi
sebagai tempat untuk menyimpan energi, sekaligus berfungsi sebagai tempat
berlangsungnya proses perubahan energi dan daerah tersebut dapat dilihat pada
Gambar 2.2 Prinsip Kerja Motor dc
Dengan mengacu pada hukum kekekalan energi :
Proses energi listrik = energi mekanik + energi panas + energi didalam medan magnet
Maka dalam medan magnet akan dihasilkan kumparan medan dengan
kerapatan fluks sebesar B dengan arus adalah I serta panjang konduktor sama dengan
L maka diperoleh gaya sebesar F, dengan persamaan sebagai berikut :
F = B I L (2.1)
dengan : F = Gaya magnet pada sebuah arus (Newton)
B = Medan magnet (Tesla)
I = Arus yang mengalir (Ampere)
L = Panjang konduktor (meter)
Arah dari gaya ini ditentukan oleh aturan kaidah tangan kiri, adapun kaidah
tangan kiri tersebut adalah sebagai berikut :
Gambar 2.3 Kaidah Tangan Kiri
Ibu jari sebagai arah gaya ( F ), telunjuk jari sebagai fluks ( B ), dan jari tengah
sebagai arus ( I ). Saat gaya ( F ) tersebut dibandingkan, konduktor akan bergerak
merupakan reaksi lawan terhadap tegangan sumber. Agar proses perubahan energi
mekanik tersebut dapat berlangsung secara sempurna, maka tegangan sumber harus
lebih besar dari pada tegangan gerak yang disebabkan reaksi lawan. Dengan memberi
arus pada kumparan jangkar yang dilindungi oleh medan maka menimbulkan
perputaran pada motor.
2.3 Sensor Optocoupler
Optocoupler diartikan sebagai Opto (Optic) dan Coupler (Penghubung). Jadi
optocoupler adalah suatu komponen penghubung (coupling) yang bekerja berdasarkan
picu dari cahaya optik. Optocoupler menggabungkan LED IR dan phototransistor
dalam satu kemasan. Pada optocoupler terdiri dari dua bagian, yaitu bagian transmitter
dan receiver. Transmitter biasanya dibangun dari sebuah led infra merah, untuk
memperoleh ketahanan yang lebih baik terhadap cahaya tampak dari pada jika
menggunakan LED biasa. Receiver dibangun dengan dasar komponen
phototransisitor, yang akan menghasilkan bias maju/ON bila mendapat cahaya (infra
merah) dari transmitter dan sebaliknya menghasilkan cutoff/OFF bila tidak mendapat
cahaya (infra merah) dari LED transmitter
(a) (b)
Bagian-bagian optocoupler:
1. Led inframerah yang berfungsi sebagai transmitter
Sinar infra merah termasuk dalam gelombang elektromagnetik yang tidak
tampak oleh mata telanjang. Sinar ini tidak tampak oleh mata karena mempunyai
panjang gelombang berkas cahaya yang terlalu panjang bagi tanggapan mata manusia.
Sifat-sifat cahaya infra merah:
1. tidak tampak manusia
2. tidak dapat menembus materi yang tidak tembus pandang
Led inframerah adalah suatu bahan semikonduktor yang memancarkan cahaya
monokromatik (cahaya yang hanya terdiri atas satu warna dan satu panjang
gelombang) yang tidak koheren ketika diberi tegangan maju. Pengembangan led
inframerah dimulai dengan alat inframerah dibuat dengan galliumarsenide. Cahaya
infra merah pada dasarnya adalah radiasi elektromagnetik dari panjang gelombang
yang lebih panjang dari cahaya tampak, tetapi lebih pendek dari radiasi gelombang
radio, dengan kata lain infra merupakan warna dari cahaya tampak dengan gelombang
terpanjang, yaitu sekitar 700 nm sampai 1 mm.
Gambar 2.5 Led Inframerah
Cahaya led inframerah timbul sebagai akibat penggabungan elektron dan hole
pada persambungan antara dua jenis semikonduktor dimana setiap penggabungan
disertai dengan pelepasan energi. Pada penggunaannya led inframerah ini merupakan
komponen elektronika yang memancarkan cahaya infra merah dengan konsumsi daya
sangat kecil. Led inframerah dapat diaktifkan dengan tegangan dc untuk transmisi atau
sensor jarak dekat, dan dengan tegangan ac (30–40 KHz) untuk transmisi atau sensor
Karakteristik dari LED Infra merah:
1.Dapat dipakai dalam waktu yang sangat lama.
2.Membutuhkan daya yang kecil.
3.Tidak mudah panas.
4.Dapat digunakan dalam jarak yang lebar.
2. Fototransistor yang berfungsi sebagai receiver
Receiver yang digunakan oleh sensor infra merah adalah jenis fototransistor,
yaitu jenis transistor bipolar yang menggunakan kontak (junction) base-collector
untuk menerima atau mendeteksi cahaya dengan gain internal yang dapat
menghasilkan sinyal analog maupun digital. Fototransistor ini akan mengubah energi
cahaya menjadi arus listrik dengan sensitivitas yang lebih tinggi dibandingkan
fotodioda ,tetapi dengan waktu respon yang secara umum akan lebih lambat daripada
fotodioda. Hal ini terjadi karena transistor jenis ini mempunyai kaki basis terbuka
untuk menangkap sinar,dan elektron yang ditimbulkan oleh foton cahaya pada
junction ini di-injeksikan di bagian basis dan diperkuat dibagian kolektornya.
Gambar 2.6 Fototransistor
Pada fototransistor, jika kaki basis mendapat sinar maka akan timbul tegangan
pada basisnya dan akan menyebabkan transistor berada pada daerah
jenuhnya(saturasi), akibatnya tegangan pada kaki kolektor akansama dengan ground
(Vout=0 V). Sebaliknya jika kakibasis tidak mendapat sinar, tidak cukup tegangan
untuk membuat transistor jenuh, akibatnya semua arus akan dilewatkan ke keluaran
Foto transistor memiliki karakteristik :
1.Pendeteksi jarak dekat Infra merah.
2.Dapat dikuatkan sampai 100 sampai 1500.
3.Respon waktu cukup cepat.
4.Dapat digunakan dalam jarak lebar.
5.Dapat dipasangkan dengan (hampir) semua penghasil cahaya atau cahaya yang
dekat dengan inframerah, seperti Led inframerah, Neon, Fluorescent, lampu
bohlam, cahaya laser dan api.
6.Mempunyai karakteristik seperti transistor, kecuali bagian basis digantikan
oleh besar cahaya yang diterima.
Ditinjau dari penggunaannya, Optocoupler dapat digunakan untuk mendeteksi
adanya nya penghalang antara transmitter dan receiver dengan cara bagian tengah
(antara Led Inframerah dan phototransistor) diberi suatu penghalang. Contoh
aplikasinya yaitu Optocoupler dengan piringan berlubang untuk deteksi kecepatan
putar motor, sistem deteksi lubang penanda disket pada disk drive komputer, dan
sistem limit switch pada printer dan lain-lain.
2.3.1 Prinsip kerja Optocoupler
Proses terjadinya pancaran cahaya pada LED infra merah dalam optocoupler
yaitu disaat dioda menghantarkan arus, elektron lepas dari ikatannya karena
memerlukan tenaga dari catu daya listrik. Setelah elektron lepas, banyak elektron yang
bergabung dengan lubang yang ada di sekitarnya (memasuki lubang lain yang
kosong). Pada saat memasuki lubang yang lain, elektron melepaskan tenaga yang akan
diradiasikan dalam bentuk cahaya, sehingga dioda akan menyala atau memancarkan
cahaya pada saat dilewati arus. Cahaya infra merah yang terdapat pada optocoupler
tidak perlu lensa untuk memfokuskan cahaya karena dalam satu kemasan mempunyai
jarak yang dekat dengan penerima cahaya infra merah yaitu fototransistor.
Fototransistor memiliki sambungan kolektor–basis yang besar dengan cahaya infra
merah, karena cahaya ini dapat membangkitkan pasangan lubang elektron. Dengan
diberi prasikap maju, cahaya yang masuk akan menimbulkan arus pada kolektor.
Fototransistor merupakan komponen elektronika yang berfungsi sebagai detektor
2.4 Sensor LM35
Sensor LM35 merupakan sensor yang digunakan untuk mendeteksi suhu
dengan cara mengubah besaran suhu menjadi besaran elektris dalam bentuk tegangan.
Dikemas dalam bentuk Integrated Circuit (IC) .
(a) (b)
Gambar 2.7 (a). Bentuk Fisik Sensor LM 35
(b). Konfigurasi Pin LM 35 Dilihat Dari Bagian Bawah
Sensor LM35 ini merupakan sensor yang banyak digunakan dalam melakukan
pengukuran dan pengontrolan suhu, dikarenakan sensor LM35 ini memiliki
keakuratan yang tinggi, kemudahan perancangan jika dibandingkan dengan sensor
suhu yang lain serta memiliki karakteristik sensor yang cukup baik.
Gambar 2.8 Karakteristik Sensor LM 35
Dimana karakteristik dari sensor LM 35 ini, yaitu:
1. Dapat dikalibrasi langsung ke dalam besaran Celcius karena sensor suhu jenis
LM35 ini sudah difungsikan untuk mendeteksi besaran suhu dalam skala
2. Memiliki sensitivitas suhu dengan faktor skala linier antara tegangan dan suhu
10 mVolt/ºC , sehingga sensor akan melakukan penginderaan pada saat
perubahan suhu setiap suhu 1 ºC akan menunjukan tegangan sebesar 10 mV.
Karena itu LM35 tidak lagi memerlukan kalibrasi ekternal.
3. Memiliki tingkat kelinieran yang tinggi, yaitu suhu akan naik 1ºC setiap
kenaikan 10 mV dan suhu akan turun setiap pengurangan 10mV.
4. Mudah dalam penempatan, yaitu pada penempatannya LM35 dapat
ditempelkan dengan perekat atau dapat pula ditempatkan pada permukaan
semen akan tetapi suhunya akan sedikit berkurang sekitar 0,01 ºC karena
terserap pada suhu permukaan tersebut.
5. Memiliki pemanasan sendiri yang rendah (low self heating) yaitu kurang dari
0,5ºC,sehingga tingkat kesalahan dalam pembacaan suhu rendah.
6. Memiliki jangkauan maksimal operasi suhu antara -55 ºC sampai +150 ºC.
7. Bekerja pada tegangan 4 sampai 30 volt dengan arus rendah yaitu 60 µA.
2.4.1 Prinsip Kerja LM35
LM35 merupakan IC yang digunakan sebagai sensor suhu. IC tersebut
mengubah kondisi suhu lingkungan disekitarnya menjadi sinyal listrik. Sinyal listrik
keluaran LM35 ini memiliki nilai yang sebanding dengan suhu lingkungan dalam
bentuk derajat celcius (ºC). Kerja dari sensor suhu LM35 ini adalah perubahan nilai
tahanannya akan semakin besar apabila suhu lingkungannya semakin rendah dan nilai
tahanannya akan menjadi kecil apabila suhu lingkungannya semakin tinggi. Maka
adanya perubahan suhu akan menyebabkan nilai tahanan dari LM35 juga akan
berubah. Pada saat LM35 aktif elektron-elektron pada pita valensi akan melakukan
pergerakan dari katoda ke anoda sehingga menimbulkan perbedaan potensial.
Perbedaan potensial inilah yang menjadi tegangan keluaran dari LM35. Dimana nilai
tegangan LM35 akan semakin besar jika nilai suhu besar sebaliknya nilai tegangan
LM35 akan semakin kecil jika nilai suhu yang dibaca kecil. LM35 memiliki tingkat
kelinieran yang tinggi dimana kenaikan 1ºC akan menghasilkan tegangan sebesar
2.5. ADC (Analog to Digital Converter)
Analog to Digital Converter (ADC) adalah sebuah piranti yang dirancang
untuk mengubah sinyal-sinyal analog menjadi sinyal-sinyal digital. Proses
pengubahan ini dikenal juga dengan nama sistem akusisi data. ADC merupakan
piranti masukan, artinya mikrokontroler mendapatkan data dari ADC. ADC
memerlukan sinyal write dan read. Sinyal write digunakan sebagai perintah bagi ADC
untuk memulai konversi. A/D Converter ini dapat dipasang sebagai pengonversi
tegangan analog dari suatu peralatan sensor ke konfigurasi digital yang akan
diumpankan ke suatu sistem minimum. Terdapat 4 macam ADC yang memenuhi
standar industri, yaitu integrating, tracking, flash/paralel. dan successive
approximation
Menurut cara pengkonversiannya, ADC dapat dikelompokkan dalam beberapa
jenis yaitu:
1. Tipe integrating
Tipe integrating menawarkan resolusi tertinggi dengan biaya terendah. ADC
tipe ini tidak dibutuhkan rangkaian sample hold. Tipe ini memiliki kelemahan
yaitu waktu konversi yang agak lama, biasanya beberapa milidetik.
2. Tipe tracking
Tipe tracking menggunakan prinsip up down counter (pencacah naik dan
pencacah turun). Binary counter (pencacah biner) akan mendapat masukan
clock secara kontinyu dan hitungan kan bertambah atau berkurang tergantung
pada kontrol dari pencacah apakah sedang naik (up counter) atau sedang turun
(down counter). ADC tipe ini tidak menguntungkan jika dipakai pada sistem
yang memerlukan rangkaian sample hold. ADC tipe ini sangat tergantung pada
kecepatan clock pencacah, semakin tinggi nilai clock yang digunakan, maka
proses konversi akan semakin singkat.
3. Tipe flash/ paralel
Tipe ini dapat menunjukkan konversi secara lengkap pada kecepatan 100 MHz
dengan rangkaian kerja sederhana. Sederetan tahanan mengatur masukan
konverter sebelumnya jadi untuk tegangan masukan Vin denagn full scale
range, komparator dengan bias di bawah Vin akan mempunyai keluaran
rendah. Keluaran komparator ini tidak dalam bentuk biner murni. Suatu
dekoder dibutuhkan untuk membentuk suatu keluaran yang biner. Beberapa
komparator berkecepatan tinggi, dengan waktu tunda (delay) kurang dari 6 ns
banyak digunakan karena itu dihasilkan kecepatan konversi yang sangat tinggi.
Jumlah komparator yang dibutuhkan untuk suatu konversi n bit adalah 2n-1.
4. Tipe successive approximation convertion
Tipe successive approximation convertion merupakan suatu konverter yang
paling sering ditemukan dalam dasar perangkat keras yang menggunakan
ADC. Tipe ini memiliki kecepatan konversi cukup tinggi meskipun dari segi
harga relatif mahal. Prinsip kerja konverter tipe ini adalah menggunakan nilai
digital terhadap nilai tegangan analog yang dikonversikan.
Jenis ADC yang biasa digunakan dalam perancangan adalah jenis successive
approximation convertion (SAR) atau pendekatan bertingkat yang memiliki waktu
konversi jauh lebih singkat . IC ADC 0804 merupakan salah satu dari sekian banyak
pengubah data analog menjadi data digital
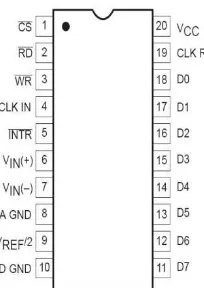
Jenis 0804 ini merupakan ADC yang simpel dan mudah digunakan .IC ADC
0804 ini mempunyai 20 pin dengan konfigurasi seperti gambar berikut :
Pada ADC 0804 ini, terdapat dua jenis prinsip didalam melakukan konversi,
yaitu free running dan mode control. Pada mode free running, ADC akan
mengeluarkan data hasil pembacaan input secara otomatis dan berkelanjutan
(continue). Prinsip yang kedua yaitu mode control, pada mode ini ADC baru akan
memulai konversi setelah diberi instruksi dari mikrokontroler. Instruksi ini dilakukan
dengan memberikan pulsa rendah kepada masukan WR sesaat, kemudian membaca
keluaran data ADC setelah keluaran INTR berlogika rendah. Pada penelitian ini,
prinsip konversi yang digunakan adalah mode control.
Secara umum Rangkaian di dalam IC ADC memiliki 2 bagian utama, yaitu:
1. Bagian Sampling dan Hold, yang berfungsi menangkap atau menahan tagangan
analog input sesaat untuk seterusnya diumpankan ke rangkaian pengonversi.
2. Rangkaian Konversi A/D (plus rangkaian kontrolnya).
Gambar dibawah ini menggambarkan bagaimana aliran sinyal analog diubah ke
sinyal digital.
Gambar 2.10 Diagram ADC Secara Umum
Rangkaian di atas dioperasikan sebagai berikut. Pertama, kontroler, dalam hal
ini mikroprosesor / mikrokontroller menghubungi ADC dengan mengirim sinyal CE. Artinya, ADC diaktifkan. Kemudian SOC (start of conversion) dikirimkan sehingga ADC mulai melakukan sampling sinyal dan diikuti dengan konversi ke digital.
Bila konversi selesai maka ADC akan mengirimkan tanda selesai EOC (end of conversion) yang artinya hasil konversi telah siap dibaca di (PB7-PB0). ). Program
mikroprosesor harus dimuati dengan suatu program loop tertutup dan menunggu tanda
untuk membaca data dari ADC. Meski tanda ini tidak harus diperhatikan, tetapi
berakibat data yang dipaksa dibaca akan sering invalid karena CPU tidak dapat
membedakan keadaan ambang (ketika ADC tengah melakukan konversi) dengan
keadaan data siap (valid). Agar lebih efektif, fungsi interrupt harus diaktifkan untuk
menghindari terjebaknya CPU dalam loop saat menunggu ADC siap. Dengan
demikian CPU hanya akan membaca data bila mendapatkan interrupt.
Secara singkat, ADC memerlukan bantuan sekuensi kontrol untuk menangkap
dan mengkonversi sinyal. Seberapa lama ADC dapat sukses mengkonversi suatu nilai
sangat tergantung dari kemampuan sampling dan konversi dalam domain waktu.
Makin cepat prosesnya, makin berkualitas pula ADC tersebut. Karena inilah maka
karakteristik ADC yang paling penting adalah waktu konversi (conversion time).
Namun demikian, kemampuan riil ADC dalam kontrol loop tertutup dalam sebuah
sistem lengkap justru sangat dipengaruhi oleh kemampuan kontroler atau prosesor
dalam mengolah data input-output secara cepat, dan bukan hanya karena kualitas
ADC-nya.
2.6 Mikrokontroler
Mikrokontroler adalah single chip yang memiliki kemampuan untuk
diprogram dan dirancang khusus untuk aplikasi kontrol serta dilengkapi dengan ROM,
RAM dan fasilitas I/O pada satu chip. Mikrokontroler merupakan suatu hasil dari
pekembangan teknologi semikonduktor yang menghasilkan suatu chip dengan
kemampuan komputasi yang sangat cepat dengan bentuk yang kecil dan harga yang
murah. Mikrokontroler terus berkembang dengan tujuan untuk memenuhi kebutuhan
pasar terhadap alat-alat elektronik dengan perangkat cerdas, cepat sebagai pengontol
dan pemprosesan data.
2.6.1 Mikrokontroler AT89S52
Mikrokontroler AT89S52 adalah salah satu anggota dari keluarga MCS-51 seri
8052 merupakan pengembangan dari seri 8051,dirancang oleh atmel yang paling
(Programmable and Erasable Read Only Memory), yang memungkinkan memori
program untuk dapat diprogram berkali-berkali (1000 siklus baca/tulis).
Gambar 2.11 Blok Diagram Fungsional AT89S52
Mikrokontroler AT89S52 memiliki spesifikasi sebagai berikut :
1. Read Only Memory (ROM) sejumlah 8 kilobyte
ROM atau Read Only Memory merupakan memori penyimpanan data yang isinya
tidak dapat diubah atau dihapus (hanya dapat dibaca). ROM biasanya diisi dengan
program untuk menjalankan mikrokontrolersetelah power dinyalakan dan berisi
data-data konstanta /kode yang diperlukan oleh program. Kapasitas memori yang
disediakan oleh AT89S52 ini adalah 8 kilobyte
2. Read Only Memory (RAM) sejumlah 256 byte
RAM atau Random Access Memory merupakan memori penyimpanan data yang
isinya dapat diubah atau dihapus .RAM biasanya berisi data-data variabel dan
register. Data yang tersimpan pada RAM bersifat volatile (hilang jika catu daya
3. Empat buah port I/O, yang masing masing terdiri dari 8 bit
I/O (Input/Output) port merupakan sarana yang dipergunakan oleh mikrokontroler
untuk mengakses peralatan-peralatan lain, berupa pin-pin yang dapat berfungsi
untuk mengeluarkan data-data digital atau berfungsi untuk menginput data .Selain
itu, dapat digunakan sebagai terminal komunikasi paralel, serta komunikasi serial
(pin10 dan 11).
4. Tiga buah 16 bit timer/counter/time/
16 bit (2 byte) timer/counter merupakan salah satu register khusus yang berfungsi
sebagai pencacah/penghitung eksekusi program mikrokontroler.
5. Interface komunikasi serial
Interface komunikasi serial merupakan suatu fungsi port yang terdapat dalam
mikrokontroler dalm melakukan antarmuka (interface) secara serial yaitu pada P3.0
dan P3.1.
6. Memiliki kemampuan Arithmetic and Logic Unit (ALU)
Arithmetic and Logic Unit (ALU) memiliki kemampuan mengerjakan roses-proses
arimatika (penjumlahan,pengurangan,pengalian,pembagian) dan operasi logika
(AND,OR,XOR,NOT) terhadap bilangan bulat 8 atau 16 bit.
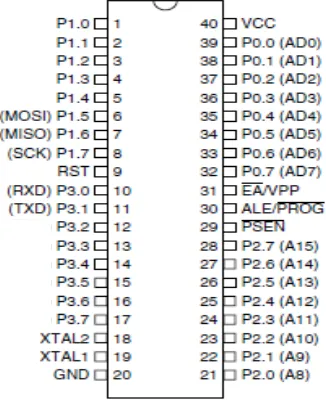
Arsitektur hardware mikrokontroler AT89S52 dari perspektif luar atau biasa
disebut pinout digambarkan pada gambar di bawah ini:
Berikut adalah penjelasan mengenai fungsi dari tiap-tiap pin (kaki) yang ada
pada mikrokontroler AT89S51 :
a. Port 0 (Pin 39 – Pin 32)
Merupakan dual-purpose port (port yang memiliki dua kegunaan). Pada disain
yang minimum (sederhana), port 0 digunakan sebagai port Input/Output (I/O).
Sedangkan pada disain lebih lanjut pada perancangan dengan memori eksternal
digunakan sebagai data dan address (alamat) yang di-multiplex.
b. Port 1 (Pin 1 – Pin 8)
Port 1 berfungsi sebagai I/O biasa, pada kaki ke 6, ke 7 dan ke 8 terdapat Mosi,
Miso dan Sck sebagai masukan dari ISP Programmer yang terhubung ke komputer.
Tanpa adanya port ini maka mikrokontroler tidak dapat diprogram oleh ISP
Programmer.
c. Port 2 (Pin 21 – pin 28)
Merupakan dual-purpose port. Pada disain minimum digunakan sebagai port I/O
(Input/Output). Sedangkan pada disain lebih lanjut digunakan sebagai high byte dari
address (alamat).
d. Port 3 (Pin 10 – pin 17)
Merupakan dual-purpose port. Selain sebagai port I/O (Input/Output), port 3 juga
mempunyai fungsi khusus. Fungsi khusus tersebut diperlihatkan pada tabel 2.1. Port 3
terdapat pada pin 10-17.
Tabel 2.1 Fungsi Khusus Port 3 No. Pin Port Pin Nama Port Fungsi
16 P3.6 WR Memori data eksternal writestrobe 17 P3.7 RD Memori data eksternal readstrobe
e. PSEN (pin 29)
PSEN (Program Store Enable) adalah sinyal kontrol yang mengizinkan untuk mengakses program (code) memori eksternal. Pin ini dihubungkan ke pin OE (Output
instruksi. PSEN akan selalu bernilai “1” (HIGH) pada pembacaan program memori
internal.
f. ALE (pin 30)
ALE (Address Latch Enable) digunakan untuk men-demultiplex address (alamat) dan data bus. Ketika menggunakan program memori eksternal, port 0 akan
berfungsi sebagai address (alamat) dan data bus. Pada setengah paruh pertama memori
cycle ALE akan bernilai “1” (HIGH) sehingga mengizinkan penulisan address
(alamat) pada register eksternal. Dan pada setengah paruh berikutnya akan bernilai “1”
(HIGH) sehingga port 0 dapat digunakan sebagai data bus.
g. EA (pin 31)
EA (External Access) pada kondisi low, pin ini akan berfungsi sebagai EA yaitu mikrokontroler akan menjalankan program yang ada pada memori eksternal setelah
sistem di-reset. Jika kondisi high, pin ini akan berfungsi untuk menjalankan program
yang ada pada memori internal.
h. RST (pin 9)
Jika pada pin ini diberi input “1” (HIGH) selama minimal 2 cycle, maka sistem
akan di-reset ( kembali ke awal )
i. On-Chip oscillator
AT89S52 telah memiliki on-chip oscillator yang dapat bekerja jika didrive
menggunakan kristal. Tambahan kapasitor diperlukan untuk menstabilkan sistem.
Nilai kristal yang biasa digunakan pada AT89S52 ini adalah 12 MHz. On-Chip
Oscillator pada AT89S52 terdiri dari XTAL1 (pin 19) input untuk clock internal dan
XTAL2 (pin 18) output dari osilator.
j. Koneksi power
AT89S52 beroperasi pada tegangan 5 volt. Pin Vcc terdapat pada pin 40,
sedangkan pin Gnd (ground) terdapat pada pin 20.
Intruksi-instruksi dalam mikokontroler
Intruksi-instruksi yang dimaksud merupakan seperangkat intruksi yang disusun
menjadi sebuah program untuk memerintahkan microcomputer melakukan suatu
Instruksi-instruksi yang digunakan dalam memprogram suatu program yang diisikan
pada AT89S52 adalah instruksi bahasa pemograman assembler.
2.6.2 Instruksi Transfer Data
Instruksi transfer data terbagi menjadi dua kelas operasi sebagai berikut :
• Transfer data umum ( General Purpose Transfer ), yaitu : MOV, PUSH dan POP.
• Transfer spesifik akumulator ( Accumulator Specific Transfer ), yaitu : XCH, XCHD, dan MOVC.
Instruksi transfer data adalah intruksi pemindahan /pertukaran data antara
operand sumber dengan operand tujuan. Operand-nya dapat berupa register, memori
atau lokasi suatu memori. Penjelasan instruksi transfer data tersebut dapat dijelaskan
sebagai berikut.
MOV : Transfer data dari Register satu ke Register yang lainnya, antara Register
dengan Memory.
PUSH : Transfer byte atau dari operand sumber ke suatu lokasi dalam stack yang
alamatnya ditunjuk oleh register penunjuk.
POP : Transfer byte atau dari dalam stack ke operand tujuan.
XCH : Pertukaran data antara operand akumulator dengan operand
sumber.
XCHD : Pertukaran nibble orde rendah antara RAM internal ( lokasinya
ditunjukkan oleh R0 dan R1 )
MOVC : Pertukaran data dengan menjumlahkan isi data pointer dengan isi
akumulator
2.6.3 Instruksi Aritmatik
Operasi dasar aritmatik seperti penjumlahan, pengurangan, perkalian dan
pembagian dimiliki oleh AT89S52 dengan mnemonic : INC, ADD, SUBB, DEC,
MUL dan DIV. Penjelasan dari operasi mnemonic tersebut dijelaskan sebagai berikut :
INC : Menambah satu isi sumber operand dan menyimpan hasilnya ke operand
tersebut
ADD : Penjumlahan antara akumulator dengan sumber operand dan hasilnya
SUBB : Pengurangan akumulator dengan sumber operand, hasilnya disimpan
dalam operand tersebut.
DEC : Mengurangi sumber operand dengan 1. dan hasilnya disimpan pada
operand tersebut.
MUL : Perkalian antara akumulator dengan Register B.
DIV : Pembagian antara akumulator dengan Register B dan hasilnya disimpan
dalam akumulator, sisanya di Register B.
2.6.4. Instruksi Logika
Mikrokontroller AT89S52 dapat melakukan operasi logika bit maupun
operasi logika byte. Operasi logika tersebut dibagi atas dua bagian yaitu :
• Operasi logika operand tunggal, yang terdiri dari CLR, SETB, CPL, RL, dan RR.
• Operasi logika dua operand seperti : ANL, ORL, dan XRL.
Operasi yang dilakukan oleh AT89S52 dengan pembacaan instruksi logika tersebut
dijelaskan dibawah ini :
CLR : Menghapus byte atau bit menjadi nol.
SETB : Membuat bit menjadi satu.
CPL : Mengkomplemenkan akumulator.
RL : Rotasi akumulator 1 bit ke kiri.
RR : Rotasi akumulator 1 bit ke kanan.
ANL : Meng-AND kan data bit secara langsung dengan isi akumulator.
ORL : Meng-OR kan data bit secara langsung dengan isi akumulator.
XRL : Meng_XOR kan data bit secara langsung dengan isi akumulator.
2.6.5 Instruksi Percabangan
Instruksi percabangan terdiri dari (3) tiga kelas operasi yaitu :
• Lompatan tidak bersyarat ( Unconditional Jump ) seperti : SJMP, AJMP, LJMP
• Lompatan bersyarat ( Conditional Jump ) seperti : JB, JNB, JZ, JNZ, JC, JNC, CJNE, dan DJNZ.
Penjelasan dari instruksi diatas sebagai berikut :
SJMP : Lompatan untuk percabangan dengan jangkauan maksimum 1 byte
AJM : Lompatan untuk percabangan maksimum 2 Kbyte.
LCALL : Pemanggilan subroutine yang mempunyai alamat antara 2 Kbyte – 64
Kbyte.
JB : Percabangan yang akan lompat ke label atau ke alamat yang dituju jika
dalam keadaan bit.
JNB : Percabangan yang akan lompat ke label atau ke alamat yang dituju jika
dalam keadaan tidak bit.
JZ : Percabangan akan dilakukan jika akumulator adalah nol.
JNZ : Percabangan akan dilakukan jika akumulator adalah tidak nol.
JC : Percabangan terjadi jika CF (Carry Flag) diset “1”.
JNC : Percabangan terjadi jika CF (Carry Flag) diset “0”.
CJNE : Operasi perbandingan operand pertama dengan operand kedua,
jika tidak sama akan dilakukan percabangan.
DJNZ : Mengurangi nilai operand sumber dan percabangan akan
dilakukan apabila isi operand tersebut tidak nol.
RET : Kembali ke subroutine.
RETI : Kembali ke program interupsi utama
2.7 Liquid Crystal Display (LCD)
LCD merupakan salah satu komponen yang banyak dipilih untuk
dipergunakan sebagai tampilan karena kemudahannya dalam mengatur tampilan agar
lebih menarik. Salah satu contoh LCD yang banyak digunakan yaitu LCD M1632
(LCD 2x16).
LCD display module M1632 terdiri dari dua bagian, yang pertama merupakan
panel LCD sebagai media penampil informasi dalam bentuk huruf/ angka dua baris,
masing – masing baris bisa menampung 16 huruf/ angka.
Bagian kedua merupakan sebuah sistem yang dibentuk dengan mikrokontroler
yang ditempel dibalik pada panel LCD, berfungsi mengatur tampilan LCD. Dengan
demikian pemakaian LCD M1632 menjadi sederhana, sistem lainnya cukup
mengirimkan kode – kode ASCII dari informasi yang ditampilkan .
Spesifikasi LCD M1632, yaitu ;
a. Tampilan 16 karakter2 baris.
b. RAM data tampilan dan RAM pembangkit karakter dapat dibaca dari unit
mikroprosesor.
c. Beberapa fungsi perintah antara lain adalah penghapusan tampilan (display
clear), posisi kursor awal (cursor home), tampilan karakter kedip (display
character blink), pengeseran krusor (cursor shift) dan penggeseran tampilan
(display shif).
d. Rangkaian otomatis reset saat daya dinyalakan.
e. Catu daya tunggal +5 volt.
2.8 Relay
Relay adalah komponen elektronika berupa saklar elektronik yang digerakkan
oleh arus listrik. Secara prinsip, relai merupakan tuas saklar dengan lilitan kawat pada
batang besi (solenoid) di dekatnya. Ketika solenoid dialiri arus listrik, tuas akan
tertarik karena adanya gaya magnet yang terjadi pada solenoid sehingga kontak saklar
akan menutup. Pada saat arus dihentikan, gaya magnet akan hilang, tuas akan kembali
ke posisi semula dan kontak saklar kembali terbuka. Relay biasanya digunakan untuk
menggerakkan arus/tegangan yang besar (misalnya peralatan listrik 4 ampere AC 220
V) dengan memakai arus/tegangan yang kecil (misalnya 0.1 ampere 12 Volt DC).
Dalam pemakaiannya biasanya relay yang digerakkan dengan arus DC dilengkapi
dengan sebuah dioda yang di-paralel dengan lilitannya dan dipasang terbalik yaitu
mengantisipasi sentakan listrik yang terjadi pada saat relay berganti posisi dari on ke
off agar tidak merusak komponen di sekitarnya
Gambar 2.14 Relay
Penggunaan relay perlu memperhatikan tegangan pengontrolnya serta kekuatan
relay men-switch arus/tegangan. Biasanya ukurannya tertera pada body relay.
Misalnya relay 12VDC/4 A 220V, artinya tegangan yang diperlukan sebagai
pengontrolnya adalah 12Volt DC dan mampu men-switch arus listrik (maksimal)
sebesar 4 ampere pada tegangan 220 Volt. Sebaiknya relay difungsikan 80% saja dari
kemampuan maksimalnya agar aman, lebih rendah lagi lebih aman. Relay merupakan
komponen yang menggunakan prinsip kerja medan magnet untuk menggerakan saklar.
Saklar ini digerakkan oleh magnet yang dihasilkan oleh kumparan didalam relay yang
dialiri arus listrik. Susunan relay sederhana adalah sebagai berikut.
Gambar 2.15 Susunan Relay Sederhana
Relay adalah suatu komponen elektronika yang akan bekerja bila ada arus
yang melalui kumparannya. Sebuah relay terdiri dari kumparan yang dililitkan pada
inti besi dan kontak-kontak penghubung. Apabila kumparan yang melilit inti besi
dilalui arus listrik maka akan menimbulkan induksi medan magnet, dan induksi ini
akan menarik kontak-kontak penghubung relay.
1. Kontak NC (Normally Close),
Kontak penghubung dalam kondisi menutup atau terhubung bila relay tidak
mendapat masukan tegangan pada kumparannya. Tetapi bila diberi tegangan
yang mencukupi pada kumparannya maka kontak penghubung menjadi
terbuka (kondisi awal sebelum diaktifkan close).
2. Kontak NO (Normally Open).
Kontak penghubung dalam kondisi terbuka bila relay tidak mendapat
tegangan pada kumparannya. Tetapi bila diberi tegangan yang mencukupi
pada kumparannya maka kontak penghubung menjadi tertutup atau
BAB III
PERANCANGAN DAN CARA KERJA ALAT
3.1 Diagram blok
Alat pengontrolan temperatur motor dc untuk mempertahankan kestabilan
kecepatan putar motor yang akan dirancang pada penelitian ini, berfungsi untuk
mengukur kecepatan putar dan temperatur motor dc serta mengontrol temperatur
motor agar penggunaan motor dapat dikontrol dengan baik, beroperasi lebih lama dan
bekerja secara efektif serta tanpa harus takut terjadinya kerusakan pada motor karena
motor tersebut beroperasi dengan temperatur yang tinggi.
Berdasarkan cara kerja dan fungsinya alat ini dibagi atas beberapa bagian/
blok. Berikut ini disajikan diagram blok rancangan penelitian dan penjelasan
masing-masing blok.
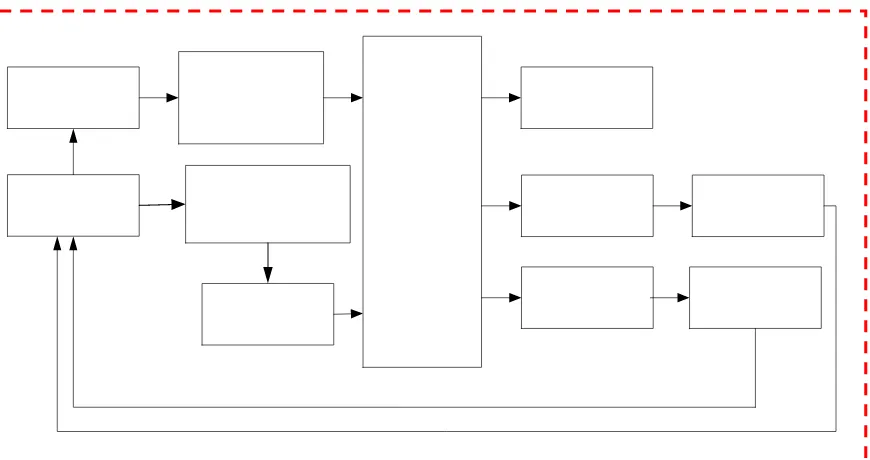
Gambar 3.1 Diagram Blok Rangkaian
ntuk dapat mengukur kecepatan motor dc digunakan sensor perpaduan antara
infra m U
erah dan fototransistor yaitu sensor optocoupler. Sensor optocoupler sebagai
piringan yang digerakkan oleh motor. Output sensor optocoupler dirancang berupa
data digital melalui rangkaian pengkondisi sinyal agar kompatibel dan dapat diproses
lebih lanjut oleh mikrokontroler dan akan ditampilkan pada LCD (baris kedua)
sebagai nilai kecepatan putar motor.
Sensor kecepatan akan memberikan data yang akan dimasukan ke
mikrok
pabila temperatur dari motor meningkat atau berada lebih besar atau sama
dengan
emikian diharapkan alat ini dapat mempermudah kita dalam hal
mengu
ontroler, sensor suhu juga akan memberikan data temperatur motor dc.
Keluaran sensor suhu akan dirangkaikan pada masukan ADC, dalam ADC ini data
dari sensor yang berupa data tegangan analog akan di ubah menjadi data bentuk
digital. Data temperatur dan kecepatan putar yang masuk ke mikrokontroler akan
diolah oleh mikrokontroler dan kemudian data temperatur ditampilkan ke LCD (baris
kedua). Kipas 1 dan kipas 2 bekerja secara otomatis (hidup/mati) oleh mikrokontroler
sesuai dengan pengaturan batas temperatur. Kipas 1 diletakkan pada bagian depan
motor dc dan kipas 2 diletakkan pada bagian kanan motor dc.
A
batas atas (batas atas diset 29 oC) maka kipas 1 dan kipas 2 diaktifkan oleh
mikrokontroler sehingga kedua kipas pendingin beroperasi, apabila temperatur motor
berada pada batas bawah (diset 28 oC) maka kipas 1 diaktifkan dan kipas 2 tidak
diaktifkan sehingga hanya kipas 1 saja yang diaktifkan mikrokontroler, tetapi jika
temperatur motor pada batas bawah tersebut (batas bawah diset 28 oC) dalam waktu
1(satu) menit belum turun menjadi temperatur < 28 oC maka kipas 1 dan kipas 2 akan
aktif agar mempercepat turunnya temperatur motor menjadi < 28 oC serta apabila
temperatur motor berada dibawah batas bawah (< 28 oC) maka kipas 1 dan kipas 2
tidak diaktifkan mikrokontroler sehingga kedua-dua kipas tidak beroperasi. Sehingga
temperatur motor dapat dikontrol dan kecepatan putar motor dapat beroperasi dalam
keadaan stabil .
Dengan d
Program diawali dengan start yang artinya program dimulai, kemudian
program melakukan inisialisasi (inisialisasi untuk timer, kipas 1 dan kipas 2 serta
untuk LCD). Program akan mengatur batas temperatur pada motor yaitu temperatur
batas atas dan temperatur batas bawah. Setelah melakukan pengaturan pada
temperatur motor, maka program akan melakukan perhitungan kecepatan putar motor,
kemudian membandingkan apakah sudah 1 detik, jika tidak lanjutkan perhitungan
kecepatan sampai 1 detik (agar kecepatan putar dapat membaca putaran motor per 1
detik (RPS), jika ya baca kecepatan, baca temperatur. Lalu program akan
membandingkan batas temperatur (temperatur batas bawah diatur 28 oC, temperatur
batas atas 29 oC). Apakah temperatur lebih kecil dari batas bawah? Jika ya, kipas 1
dan kipas 2 tidak diaktifkan (kipas1 dan kipas 2 dalam keadaan off), dan langsung
mengupdate display. Jika tidak, program akan membandingkan lagi apakah
temperatur lebih besar atau sama dengan batas atas? Jika ya, kipas 1 dan kipas 2
diaktifkan (kipas1 dan kipas 2 dalam keadaan on), dan langsung mengupdate display.
Jika tidak, program akan mengaktifkan kipas 1 dan tidak mengaktifkan kipas 2 (kipas
1 on dan kipas 2 off), artinya suhu berada tidak lebih besar atau sama dengan batas
atas dan tidak berada dibawah batas bawah, yaitu berada pada batas bawah, lalu
membandingkan apakah keadaan kipas 1 on dan kipas 2 off sudah beroperasi selama
1 menit (waktu untuk peralihan keadaan kipas 1 on dan kipas 2 off menjadi kipas 1
dan kipas 2 on agar mempercepat temperatur turun menjadi < batas bawah) ? Jika ya,
kipas 1 dan kipas 2 akan menjadi aktif dan langsung mengupdate display. Jika tidak
program juga akan langsung mengupdate display (baik display untuk temperatur
maupun display untuk kecepatan putar motor.
3.2 Sensor optocoupler
Sensor yang digunakan dalam penelitian ini adalah sensor optocoupler. Sensor
optocoupler adalah sensor kecepatan yang dapat mengukur kecepatan putar motor.
Sensor ini merupakan perpaduan led inframerah (transmitter) dan fototransistor
(receiver). Tujuan utama dari digunakan sensor optoupler dan piringan bercelah
Gambar 3.2 Rangkaian Penguat Sinyal Optocoupler
Saat lubang terlewati sinar dari led inframerah dan diterima fototransistor,
maka fototransistor akan saturasi dan saat sinar led inframerah tidak diterima
fototransistor, maka fototransistor akan cut-off. Susunan rangakaian yang terdiri dari
transistor C945 dan pemicu Schmitt (74LS14) digunakan sebagai pengkondisi sinyal
agar keluaran menjadi sinyal persegi (high/low) yang kompatibel dengan
mikrokontroler.
Dengan dibantu lempeng lingkaran yang diberi celah, sensor kecepatan akan
menghasilkan pulsa high (1) jika terdapat lubang sebaliknya sensor kecepatan akan
menghasilkan pulsa low (0) jika terdapat halangan ditengah-tengah sensor. Posisi
sensor secara mekanis dapat dilihat pada gambar 3.3. Perlu diingat bahwa jumlah
lubang yang dibuat akan mempengaruhi hasil pengukuran. Makin banyak lubang
maka pembacaan akan makin akurat dan jika dikonversi ke RPS akan didapat hasil
yang makin mendekati kondisi aslinya. Rangkaian Sensor Kecepatan berfungsi untuk
endeteksi jumlah putaran per detik. m
3.3 Sensor LM35
Sensor yang digunakan dalam penelitian ini adalah sensor LM35. Sensor
LM35 dapat mengukur dan mengontrol suhu yang terdapat disekitarnya. Sensor ini
mempunya 3 pin. Masing masing Pin mempunyai fungsi yaitu:
a. +Vs (4V – 20V)
b. Vout (-55 oC - +150 oC)
c. Gnd
Gambaran umu ikut:
Gambar 3.4 Sensor LM35
ensor LM35 adalah sensor suhu yang cukup presisi. LM35 memiliki tingkat
kelinie
bungkan ke Vcc 5V , dan gnd dihubungkan ke
ground.
3.4 Rangkaian ADC
Rangkaian ADC ini berfungsi untuk merubah data analog yang dihasilkan oleh
sensor suhu LM35 menjadi bilangan digital. Output dari ADC dihubungkan ke
mikrokontroler. Sehingga mikrokontroler dapat mengetahui besar suhu yang
dihasilkan oleh sensor melalui tegangan keluaran yang dihasilkan oleh sensor yang di m sensor efek suhu LM 35 dapat dilihat pada gambar ber
S
ran yang tinggi dimana kenaikan 1ºC akan menghasilkan tegangan sebesar
10mV atau 10 mVolt/ºC. Sehingga VLM35 = Suhu(ºC )* 10 mV. Jika LM35 membaca
suhu 27 ºC maka tegangan keluaran LM35 sebesar 270 mV. dimana nilai tegangan
LM35 akan semakin besar jika nilai suhu besar sebaliknya nilai tegangan LM35 akan
semakin kecil jika nilai suhu yang dibaca kecil. Sehingga jika adanya perubahan suhu
maka nilai tegangan LM35 juga akan mengalami perubahan. Jangkau suhu yang
dapat dibaca LM35 yaitu dari -55 ºC sampai 150 ºC. Pada rangkaian, Vout
ubah menjadi data digital. Dengan demikian proses pengukuran suhu dapat dilakukan.
keluarannya menjadi 5 volt. Tegangan 5 volt inilah yang menjadi tegangan
refrensi ADC. Dengan demikian walaupun tegangan masukan turun setengahnya,
adi 6 volt, tegangan refrensi ADC tetap 5 volt. Gambar rangkaian ADC ditunjukkan pada gambar di bawah ini:
LM
3
5
Gambar 3.5 Rangkaian ADC
Input ADC dihubungkan ke sensor suhu LM35, sehingga setiap perubahan
tegangan pada sensor suhu LM35 akan dideteksi oleh ADC. Agar output yang
dihasilkan oleh ADC bagus, maka tegangan refrensi ADC harus benar-benar stabil,
karena perubahan tegangan refrensi pada ADC akan merubah output ADC tersebut.
Oleh sebab itu pada rangkaian ADC di atas tegangan masukan 12 volt dimasukkan
ke dalam IC regulator tegangan 9 volt (7809) agar keluarannya menjadi 9 volt,
kemudian keluaran 9 volt ini dimasukkan kedalam regulator tegangan 5 volt (7805),
sehingga
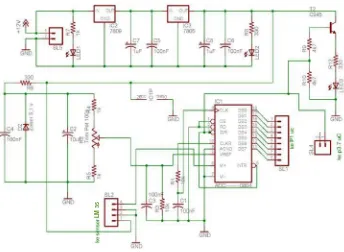
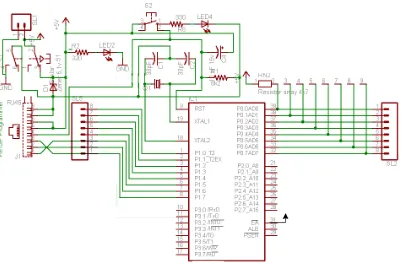
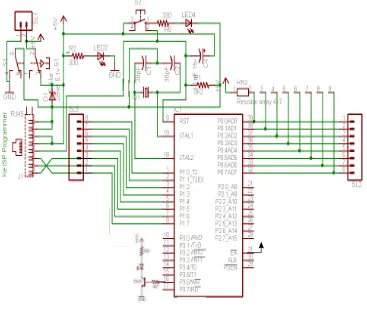
3.5 Rangkaian mikrokontroller AT89S52
Rangkaian skematik dan layout PCB sistem minimum mikrokontroler
T89S51 dapat dilihat pada gambar 3.6 di bawah ini: A
Gambar 3.6. Rangkaian Skematik Sistem Minimum Mikrokontroler AT89S52
Pada rangkaian, Pin 31 External Access Enable (EA) diset high (H). Ini
dilakukan karena mikrokontroller AT89S52 tidak menggunakan memori eskternal.
Pin 18 dan 19 dihubungkan ke XTAL 12 MHz dan capasitor 30 pF. XTAL ini akan
mempengaruhi kecepatan mikrokontroller AT89S52 dalam mengeksekusi setiap
perintah dalam program. Pin 9 merupakan masukan reset (aktif tinggi). Pulsa transisi
dari rendah ke tinggi akan me-reset mikrokontroller ini. Pin 32 sampai 39 adalah Port
0 yang merupakan saluran/bus I/O 8 bit open collector dapat juga digunakan sebagai
ultipleks bus alamat rendah dan bus data selama adanya akses ke memori program
ksternal. Pada Port 0 ini masing masing pin dihubungkan dengan resistor 4k7 ohm.
yan dihubungkan ke port 0 befungsi sebagai pull up (penaik
ikrokontroller dapat mentrigger transistor. Pin 1 sampai
adalah Port 1. Pin 21 sampai 28 adalah Port 2. Dan Pin 10 sampai 17 adalah Port 3. m
e
Resistor 4k7 ohm
tegangan) agar output dari m
Pin 20 merupakan ground dihubungkan dengan ground pada power supplay. Pin 40
krokontroler, Mosi, Miso, Sck,
Reset, Vcc dan Gnd dari kaki mikrokontroler dihubungkan ke RJ45. RJ45 sebagai
konektor yang akan dihubungkan ke ISP Programmer. Dari ISP Programmer inilah
dihubungkan ke komputer melalui port paralel.
Kaki Mosi, Miso, Sck, Reset, Vcc dan Gnd pada mikrokontroler terletak pada
kaki 6, 7, 8, 9, 40 dan 20. Apabila terjadi keterbalikan pemasangan jalur ke ISP
Programmer, maka pemograman mikrokontroler tidak dapat dilakukan karena
mikrokontroler tidak akan bisa merespon.
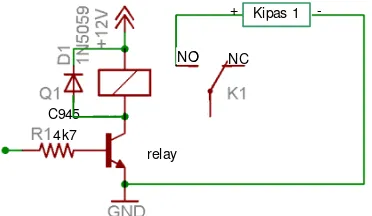
3.6Rangkaian Relay
Relay berfungsi sebagai saklar elektronik yang dapat menghidupkan atau
mematikan peralatan elektronik (dalam hal ini kipas). Rangkaian relay pengendali
ipas tampak seperti gambar 3.7 berikut :
merupakan sumber tegangan positif dihubungkan dengan + 5 volt dari power supplay.
Untuk men-download file heksadesimal ke mi
k
Kipas 1
+
-4k7 C945
relay NO
NO NC
Gambar 3.7 Rangkaian Relay Pengendali Kipas
Relay merupakan salah satu komponen elektronik yang terdiri dari lempengan
logam sebagai saklar dan kumparan yang berfungsi untuk menghasilkan medan
Pada rangkaian ini untuk mengaktipkan atau menon-aktipkan relay digunakan
transistor tipe NPN. Dari gambar dapat dilihat bahwa negatip relay dihubungkan ke
kolektor dari transistor NPN (C945) dan positif relay dihubungkan pada tegangan 12
ai Normali Close sudah mendapatkan
lt. Sementara kaki-kaki relay yang berfungsi sebagai Normali open
asih
idalam rangkaian berfungsi sebagai pull up
ntuk menaikkan tegangan agar inputan mikrokontroler sanggup mengaktifkan relay.
Kumparan pada relay akan menghasilkan tegangan singkat yang besar ketika
relay d
ara terbalik untuk mengantisipasi sentakan
listrik yang terjadi pada saat relay berganti posisi dari on ke off agar tidak merusak
komponen di sekitarnya, sentakan itu hanya terjadi ketika relay dinonaktipkan, pada
saat ini arus akan terus mengalir melalui kumparan dan arus ini akan dialirkan ke
dioda. Tanpa adanya dioda sentakan listrik itu akan mengalir ke transistor, yang
mengakibatkan kerusakan pada transistor.
3.7 Display LCD Character 2x16
Display LCD 2x16 berfungsi sebagai penampil nilai temperatur motor dc
dengan 16 pin konektor, yang
didifinisikan sebagai berikut:
volt., ini berarti jika transistor dalam keadaan aktip maka kolektor akan terhubung ke
emitor dimana emitor langsung terhubung ke ground yang menyebabkan tegangan di
kolektor menjadi 0 volt, keadaan ini akan mengakibatkan relay aktip. Disaat relay
aktif maka kaki-kaki relay yang berfungsi sebag
tegangan 12 vo
m belum mendapatkan tegangan 12 volt sebelum ada inputan (inputan berupa
logika high atau 5 volt). Sebaliknya jika transistor tidak aktip, maka kolektor tidak
terhubung ke emitor, sehingga tegangan pada kolektor menjadi 12 volt, keadaan ini
menyebabkan relay tidak aktip. Resistor d
u
inon-aktipkan dan ini dapat merusak transistor yang ada pada rangkaian ini.
Untuk mencegah kerusakan pada transistor tersebut sebuah dioda harus dihubungkan
ke relay tersebut. Dioda dihubungkan sec
(baris pertama) dan nilai kecepatan putat motor dc (baris kedua) yang terukur oleh
alat. LCD yang digunakan pada alat ini mempunyai lebar display 2 baris 16 kolom