PENGUBAH KECEPATAN PUTAR MOTOR DC
MENJADI TEGANGAN DC PADA APLIKASI
PENGATUR KECEPATAN PUTAR MOTOR DC
TUGAS AKHIR
Diajukan Untuk Memenuhi Salah Satu Syarat Memperoleh Gelar Sarjana Teknik
Program Studi Teknik Elektro
Disusun Oleh: A. WAHYU WIDODO
NIM: 005114013
PROGRAM STUDI TEKNIK ELEKTRO
FAKULTAS TEKNIK
UNIVERSITAS SANATA DHARMA
YOGYAKARTA
CONVERTER OF DC MOTOR ROTATION SPEED TO DC
VOLTAGE
IN APPLICATION OF DC MOTOR ROTATION SPEED
CONTROLLER
FINAL PROJECT
Presented as a partial fulfillment of the requirements for the degree of SARJANA TEKNIK of Electrical Engineering Study Program
By:
A. WAHYU WIDODO Student Number: 005114013
ELECTRICAL ENGINEERING STUDY PROGRAM ELECTRICAL ENGINEERING DEPARTMENT
ENGINEERING FACULTY SANATA DHARMA UNIVERSITY
Pernyataan Keaslian Karya
Saya menyatakan dengan sesungguhnya bahwa tugas akhir yang saya tulis ini tidak memuat karya atau bagian karya orang lain, kecuali yang telah disebutkan dalam kutipan dan daftar pustaka, sebagaimana layaknya karya ilmiah.
Yogyakarta, 31 Juli 2007 Penulis
HALAMAN MOTTO DAN PERSEMBAHAN
“ Kegagalan dalam hidupku akan
menjadikanku mengerti apa arti dari hidup
yang sesungguhnya”
“ Janganlah kamu melangkah dalam
keraguan, karena akan membawamu dalam
kegagalan”
“ Never give up, cause life is too
beautiful for that”
KUPERSEMBAHKAN UNTUK
BAPA DI SURGA, PUTERANYA YESUS, DAN BUNDA MARIA
Aku percaya Engkau akan memberikan apa yang aku
minta jika aku meminta kepadaMU.
Ayahku Alm. V. Wahyudi, aku percaya engkau
selalu menemaniku disetiap langkahku.
Ibuku M. Gunarti,terima kasih atas dorongan dan
INTISARI
Motor dc merupakan komponen yang sering digunakan sebagai penggerak dalam alat industri maupun alat-alat lain yang membutuhkan penggerak. Untuk itu diperlukan alat pengukur kecepatan putaran motor dc sebagai pengontrol kinerja sistem penggerak tersebut. Selain itu dengan mengetahui besarnya kecepatan, pengaturan besarnya kecepatan dapat dilakukan dengan mudah.
Pengubah Kecepatan Putar Motor DC Menjadi Tegangan DC Pada Aplikasi Pengatur Kecepatan Putar Motor DC merupakan alat ukur yang terpasang pada motor DC yang dipakai untuk mengukur kecepatan putaran motor serta mengkonversi kecepatan putaran motor mnjadi tegangan dc. Alat ini menampilkan besaran kecepatan dalam rotation per minute (rpm), frekuensi putaran motor dalam HZ dengan 4 digit seven segment dan tegangan dc dalam volt dengan digital volt meter.
Alat ini terdiri dari beberapa bagian. Optocoupler sebagai sensor pendeteksi putaran motor, pencacah baik dekade maupun BCD, rangkaian pengunci, rangkaian konverter data digital menjadi data analog, rangkaian penguat, seven segment dan digital volt meter sebagai penampil.
Alat ini mampu mengubah kecepatan putar motor dc dengan jangkauan 1383 rpm sampai 2424 rpm menjadi tegangan keluaran dc 2.74 volt sampai 4.80 volt dengan kesalahan sebesar 2 %
ABSTRACT
The DC motor represents the component which is often used as an activator in industrial appliance and others, dissimilar appliance requiring activator. For that needed by the measuring instrument of DC motor rotation as controller of the performance system activator. Beside, given the level of speed, arrangement of its level of speed can be done easily.
Converter of DC Motor Rotation Speed to DC Voltage in Application of DC Motor Rotation Speed Controller is a measuring instrument attached at DC motor applied to measure motor rotation speed and convert it to DC voltage. The instrument present the level of speed in rotation per minute (rpm), motor rotation frequency in Hz with 4 digits of seven segments and DC voltage in volt with digital volt meter.
This instrument consisted of some parts. Optocoupler as sensor of motor rotation speed detector, decade and BCD counter, latch circuit, digital to analog converter, amplifier circuit, seven segment and digital volt meter as display of the level of speed.
This instrument was able to measure the rotation speed of the DC motor within the range of 1383 rpm to 2424 rpm resulting output DC voltage 2.74 volt to 4.80 volt with level of error 2 percent.
KATA PENGANTAR
Puji Syukur penulis panjatkan kehadirat Tuhan Yang Maha Esa, oleh karena pemimpinan dan penyertaannya sehingga penulis dapat menyelesaikan Tugas Akhir yang berjudul” Pengubah Kecepatan Putar Motor DC Menjadi Tegangan DC pada Aplikasi Pengatur Kecepatan Putar Motor DC”. Tugas Akhir ini disusun sebagai salah satu syarat untuk memperoleh gelar sarjana Teknik dalam penyusunannya, banyak pihak yang telah membantu dan memberikan dukungan pada penulis, oleh karena itu penulis ingin mengucapkan terimakasih kepada:
1. Bapak Agustinus Bayu Primawaan, S.T, M.Eng, selaku Ketua Jurusan Teknik Elektro Fakultas Teknik Universitas Sanata Dharma Yogyakarta.
2. Bapak Martanto, ST., MT., Selaku Pembimbing yang telah membimbing dalam penulisa Tugas Akhir.
3. Pimpinan Fakultas Teknik, Dosen-dosen Teknik Elektro dan karyawan laboratorium TE yang sangat membantu penulis selam kuliah dan juga penelitian.
4. Alm. Bapak, Ibu tercinta, terimakasih atas segala doa, bimbingan dan perhatian.
5. Kakak dan adikku, Mas Adit, Mbak Tami, Bowo dan Keponakanku Bintang, Terimakasih atas dukungan kalian.
6. Mbah Jondit, Terimakasih untuk semua perlengkapannya.
8. Sahabat-sahabatku yang spesial: Rani, Reni, Lia, Frans, Cristy, Moko, kalian telah memberikanku keceriaan dalam hidupku.
9. Semua pihak yang tidak bisa disebutkan satu persatu, terima kasih .
Penulis menyadari bahwa Tugas akhir ini masih jauh dari sempurna, karena itu dengan segala kerendahan hati, kritikan dan saran yang membangun dari semua pihak akan penulis terima dengan senang hati. Harapan penulis semoga tugas akhir ini bermanfaat bagi para pembacanya.
Yogyakarta, 31 Juli 2007 Penulis
DAFTAR ISI
Halaman
HALAMAN JUDUL... i
HALAMAN PERSETUJUAN PEMBIMBING ... ii
HALAMAN PENGESAHAN... iii
PERNYATAAN KEASLIAN KARYA ... iv
HALAMAN MOTTO DAN PERSEMBAHAN... v
INTISARI... vi
ABSTRACT... vii
KATA PENGANTAR ... viii
DAFTAR ISI ... x
DAFTAR GAMBAR ... xiii
DAFTAR TABEL... xv
DAFTAR LAMPIRAN... xvi
BAB 1. PENDAHULUAN ... 1
1.1. Latar Belakang ... 1
1.2. Rumusan Masalah ... 2
1.3. Batasan Masalah... 2
1.4. Tujuan Masalah ... 3
1.5. Manfaat Penelitian... 3
1.6. Motodologi Penelitian ... 4
1.7. Sistematika Penulisan... 4
BAB II. DASAR TEORI ... 6
2.1. Pengertian Kecepatan ... 7
2.1.1. Kecepatan Linier Objek Berputar... 7
2.1.2. Kecepatan Sudut Objek Berputar ... 8
2.2. Sensor putaran motor... 10
2.2.1. Kecepatan Putar Motor... 11
2.3. Pembagi Frekuensi ... 11
2.4.1. Gerbang AND... 12
2.4.2. Gerbang NOT ... 13
2.4.3. Gerbang NAND... 14
2.5. Rangkaian Generator Basis Waktu... 15
2.6. Penggerbangan ... 16
2.7. Pemicu Schmitt... 18
2.8. Pencacah Module 256 (8 bit)... 19
2.9. Pencacah BCD... 20
2.10. Pengancing CD-LATCH ... 22
2.11. Pengendali LATCH dan RESET ... 23
2.12. Penyandi BCD to 7-segmen ... 24
2.13. Seven Segment ... 25
2.14. Digital to Analog Converter (DAC) ... 27
2.15. Penguat ... 29
2.15.1. Penguat Penjumlah (summing Amplifier)... 29
2.15.2. Penguat Pembalik (Inverting)... 30
2.16. Pengendali ... 31
2.16.1. Kendali Proporsional ... 32
2.16.2. Kendali Integral ... 33
2.16.3. Kendali Propersional Integral... 34
2.17. Penggerak Motor ... 36
2.18. Motor DC ... 37
BAB III. PERANCANGAN ALAT... 39
3.1. Sensor Putaran Motor ... 39
3.1.1. Keceptan Putaran Motor... 41
3.2. Perwaktu Stabil... 41
3.3. Rangkaian Basis Waktu dan Penggerbangan ... 42
3.4. Rangkaian Pengendali Lacth dan Reset ... 43
3.5. Rangkaian Pencacah Biner ... 44
3.6. Rangkaian Pencacah BCD Hingga Penampil... 45
3.7. Konverter Digital ke Analog (DAC) ... 48
3.9. Penguat Proporsional... 51
3.9.1. Penguat Integral... 52
3.9.2. Penguat Proporsional Integral ... 54
BAB IV. DATA DAN PEMBAHASAN ... 57
4.1. Hasil Akhir Perancangan... 57
4.2. Data Kecepatan Putar Motor DC... 58
4.3. Perbandingan Pengukuran Kecepatan Menggunakan Osiloskop Digital dengan Rancangan ... 60
4.3.1. Perhitungan Kesalahan Pengukuran pada Tampilan Digital... 63
4.4. Data Konversi Digital ke Analog ... 65
4.4.1. Perbandingan DAC Pada Rancangan dengan Hasil Perhitungan ... 69
4.5. Pengendali Proporsional Integral... 71
BAB V. KESIMPULAN DAN SARAN... 76
5.1. Kesimpulan ... 76
5.2. Saran... 76
DAFTAR GAMBAR
Halaman Gambar 2.1. Diagram kotak pengubah frekuensi kecepatan motor DC menjadi
tegangan DC pada aplikasi pengatur kecepatan motor DC secara
umum ... 6.
Gambar 2.2. Sensor putaran motor ... 10
Gambar 2.3. Diagram Kotak Pembagi Frekuensi ... 11
Gambar 2.4. Simbol logika gerbang AND... 12
Gambar 2.5. Simbol logika gerbang NOR ... 13
Gambar 2.6. Simbol logika gerbang NAND... 14
Gambar 2.7. Diagram basis waktu (Time base)... 15
Gambar 2.8. Penggerbangan ... 16
Gambar 2.9. Timing diagram penggerbangan ... 17
Gambar 2.10. Karakteristik pemicu Schmitt... 18
Gambar 2.11. Pencacah biner 8 bit ... 19
Gambar 2.12. Pencacah BCD... 20
Gambar 2.13. Bentuk gelombang keluaran pencacah BCD... 22
Gambar 2.14. Rangkaian D Latch... 22
Gambar 2.15. Pulsa Latch dan Reset ... 23
Gambar 2.16. Rangkaian pengendali Latch dan Reset ... 24
Gambar 2.17. Untai penampil tujuh segmen... 26
Gambar 2.18. Penampil tujuh segmen ... 26
Gambar 2.19. Tujuh segmen dalam digit decimal ... 26
Gambar 2.20. Rangkaian LED ... 27
Gambar 2.21. Dasar rangkain DAC 8 bit... 28
Gambar 2.22. Rangkaian DAC dengan satu keping IC ... 28
Gambar 2.23. Penguat penjumlah ... 29
Gambar 2. 24. Penguat pembalik ... 31
Gambar 2.25. Pangkalan pengendali. Proposional ... 32
Gambar 2.26. Rangkaian Kendali Integral... 33
Gambar 2.28.Rangkaian penguat arus ... 37
Gambar 2.29.Rangkaian ekiuvalen motor DC ... 38
Gambar 3.1. Diagram blok rangkaian pengubah Frekuensi kecepatan motor DC menjadi tegangan DC pada aplikasi pengatur kecepatan motor DC ... 39
Gambar 3.2.Gambar Sensor putaran motor DC ... 40
Gambar 3.3.Gambar rangkaian pewaktu stabil ... 42
Gambar 3.4.Rangkaian baris waktu dan penggerbangan ... 43
Gambar 3.5.Rangkaian pengendali latch dan reset ... 43
Gambar 3.6.Rangkaian IC 4040... 44
Gambar 3.7.Rangkaian percacah decade ... 45
Gambar 3.8.Rangkaian pengunci hingga penampil ... 47
Gambar 3.9.Perancangan rangkaian DAC ... 48
Gambar 3.10.Gambar rangkaian penjumlah Beda ... 51
Gambar 3.11.Rangkaian penguat Proposional ... 52
Gambar 3.12.Rangkaian penguat Integral ... 53
Gambar 3.13.Hubungan antara input dan output pada kendali PI ... 55
Gambar 3.14.Rangkaian penguat proposional Integral ... 56
Gambar 4.1.Hasil perancangan ... 57
Gambar 4.2.Gambar Sinyal Keluaran Sensor Kecepatan Motor DC dengan Vi = 3.5 V... 58
Gambar 4.3.Gambar Sinyal Keluaran Sensor Kecepatan Motor DC dengan Vi = 4 V... 59
Gambar 4.4.Grafik Perbandingan Pengukuran Osiloskop Digital Dengan Percobaan. ... 62
Gambar 4.5.Respon output kontrol PI, dengan KP=1, Ki=1, Vset = 0.5 V... 72
Gambar 4.6.Respon output kontrol P1, dengan KP=1, Ki=1, Vset = 2 V. ... 73
Gambar 4.7. Respon output kontrol PI, dengan KP=1, Ki=1, Vset = 3 V... 73
DAFTAR TABEL
Halaman
Tabel 2.1.Tabel kebenaran gerbang AND 2 masukan ... 12
Tabel 2.2.Tabel kebenaran gerbang NOT ... 13
Tabel 2.3. Tabel kebenaran gerbang NAND... 15
Tabel 2.4. Tabel kebenaran pencacah BCD ... 21
Tabel 2.5.Tabel kebenaran penggrendel D ... 23
Tabel 2.6.Jalur segment yang Aktif ... 25
Tabel 3.1.Besarnya pengeluaran DAC menurut perhitungan ... 50
Tabel 4.1.Perbandingan antara data percobaan pada tampilan digital dengan pengukuran menggunakan Osiloskop Digital. ... 61
Tabel 4.2.Tabel Kesalahan Pengukuran Kecepatan Motor DC ... 64
Tabel 4.3.Data perhitungan dan pengukuran pada DAC ... 66
Tabel 4.4.Perubahan keluaran setiap tingkat pengukuran... 68
Tabel 4.5.Perbandingan output DAC perancangan dengan hasil perhitungan... 69
DAFTAR LAMPIRAN
Lampiran 1. Ganbar keseluruhan rangkaian Lampiran 2. Data sheet optocoupler H21A2 Lampiran 3. Data sheet IC 4040
Lampiran 4 . Data sheet IC 4017 Lampiran 5. Data sheet IC 74 LS 75 Lampiran 6. Data sheet IC 74 LS 90 Lampiran 7. Data sheet IC 74 LS 47 Lampiran 8. Data sheet IC 74 LS 132 Lampiran 9. Data sheet IC 74 LS 14 Lampiran 10. Data sheet IC MC 1408 Lampiran 11. Data sheet IC LM 741
BAB I PENDAHULUAN
1.1. Latar Belakang
Dalam sistem kontrol kecepatan putar motor DC hal penting yang harus dilakukan adalah mendefisinikan struktur sistem tersebut secara tepat. Jika sebuah sistem kontrol adalah sistem yang stabil dan hanya memerlukan perbaikan respon baik mengurangi atau memperbesar kecepatan respon, maka yang dilakukan adalah membuat sistem kontrol dari jenis proporsional dan integral. Kontrol ini merupakan gabungan antara kontrol proporsional dan kontrol integral yang mampu melakukan perbaikan sistem kontrol. Dalam kontrol kecepatan motor DC dibutuhkan suatu umpan balik ( feed back ) agar sistem menjadi stabil. Pengubah kecepatan putar motor DC pada aplikasi pengatur kecepatan putar motor DC pada rancangan ini merupakan
feed back dalam sistem kontrol kecepatan motor DC.
Karena masukan sistem kontrol berupa tegangan DC maka frekuensi kecepatan motor DC diubah menjadi tegangan DC menggunakan rangkaian pengubah kecepatan putar motor DC menjadi tegangan DC. Pengubah kecepatan putar motor DC menjadi tegangan DC pada aplikasi pengatur kecepatan motor DC ini, merupakan rangkaian yang mampu mengubah frekuensi kecepatan motor DC menjadi tegangan DC. Rangkaian ini didasarkan pada sistem digital dan sistem analog. Pada rangkaian ini pulsa – pulsa digital dari keluaran sensor kecepatan motor DC akan diubah kedalam data analog (tegangan). Secara umum rangkaian ini terdiri dari motor DC,
sensor kecepatan, pencacah frekuensi yang hasil cacahannya ditampilkan oleh unit penampil (display) serta sebuah pengontrol.
1.2. Rumusan Masalah
Sistem yang akan dirancang ini terdiri dari pengendali,motor DC, sensor kecepatan, pencacah frekuensi, penguat serta unit penampil. Pengubah kecepatan putar motor DC menjadi tegangan DC pada aplikasi pengatur kecepatan motor DC mempunyai beberapa rumusan masalah sebagai berikut: 1. Membuat pengontrol motor DC dengan menentukan sistem
pengontrolan serta besar penguatan agar sistem menjadi stabil dan memiliki nilai error yang kecil.
2. Membuat pengubah frekuensi putar motor menjadi tegangan DC
(frequency to voltage) dengan sistem digital dengan masukan yang
berupa frekuensi kecepatan motor DC.
3. Menampilkan hasil dari pengubah frekuensi menjadi tegangan DC
(frequency to voltage) dan nilai tegangan DC dengan menggunakan
penampil digital.
1.3. Batasan Masalah
Sistem pengubah kecepatan putar motor DC menjadi tegangan DC
pada aplikasi pengatur putaran motor DC dirancang memiliki spesifikasi sebagai berikut :
2. Frekuensi maksimum putaran motor DC pada rancangan ini sebesar 42 Hz.
3. Time base (waktu buka) yang digunakan pencacah untuk mencacah
sebesar 1 detik.
4. Tegangan DC keluaran pada rancangan ini antara 0 V saampai 5 V. 5. Penampil yang digunakan yaitu penampil digital berupa seven segment
dan DVM (Digital Volt Meter).
1.4. Tujuan Penelitian
1. Membuat pengubah kecepatan putar motor DC menjadi tegangan DC
menggunakan rangkaian digital.
2. Dapat mengetahui proses pengkonversian kecepatan putar motor DC
menjadi tegangan DC.
3. Dapat mengukur dan mengetahui kecepatan putar motor DC dengan menggunakan sensor kecepatan .
4. Dapat mengetahui nilai rpm dan frekuensi putar motor dengan menggunakan seven segment dan nilai tegangan DC dan DVM (Digital
Volt Meter).
1.5. Manfaat Penelitian
1. Merealisasikan salah satu bentuk teknik pengkonversian dari data digital menjadi data analog.
3. Hasil penelitian ini dapat dikembangkan untuk keperluan yang lainnya, misalnya untuk mengubah frekuensi kecepatan putar motor AC menjadi tegangan DC.
1.6. Metodologi Penelitian
1. Studi literatur yang ada serta mempelajari cara kerja dan cara merencanakan dalam pembuatan peralatan tersebut.
2. Perancangan alat mennggunakan teori yang sudah ada untuk mendapatkan karakteristik yang sesuai dengan keinginan ke dalam rangkaian yang disusun menjadi kesatuan utuh.
3. Melakukan pengamatan pada titik-titik uji penting melalui percobaan di laboratorium.
1.7. Sistematika Penulisan
Sistem penulisan digunakan dalam laporan tugas akhir ini disusun dalam bentuk sebagai berikut :
BAB I. Pendahuluan yang berisi mengenai latar belakang penulisan, perumusan masalah, pembatasan masalah, tujuan dan manfaat penelitian serta sistematika penulisan.
BAB II. Dasar teori yang berisi mengenai dasar-dasar teori yang mendasari perangkat pengubah kecepatan putar motor DC menjadi tegangan
DC pada aplikasi pengatur putaran motor DC
perancangan tiap bagian dari pengubah kecepatan putar motor DC menjadi tegangan DC pada aplikasi pengatur putaran motor DC. BAB IV. Hasil dan pembahasan terisi data hasil percobaan alat yang telah
dibuat beserta pembahasannya.
BAB II DASAR TEORI
Pengubah kecepatan putar motor DC menjadi tegangan DC pada aplikasi pengatur kecepatan motor DC adalah suatu rangkaian yang digunakan untuk mengetahui nilai tegangan DC hasil dari konversi frekuensi masukan. Frekuensi kecepatan putar motor DC akan diketahui dengan menggunakan sensor (opto
coupler). Dengan menggunakan pembagi frekuensi maka akan didapat frekuensi
putar maksimal sebesar 42 Hz. Frekuensi tersebut yang akan menjadi masukan bagi frekuensi counter dan hasil cacahan akan ditampilkan oleh penampil
(display). Setelah dicacah maka menjadi data digital yang kemudian oleh DAC
akan dikonversi menjadi data analog (tegangan). Kemudian nilai tegangan tersebut dimasukkan ke summing amplifier bersama-sama tegangan set point. Tegangan error keluaran dari summing amplifier selanjutnya akan menjadi masukan pengontrol proportional integrator. Tegangan keluaran kontrol ini yang akan menjadi pengontrol kecepatan putar motor DC.
Set point +
-
Gb. 2.1. Diagram kotak pengubah frekuensi kecepatan motor DC menjadi tegangan DC pada aplikasi pengatur kecepatan motor DC secara umum
∑ P I Penguat
Motor
SENSOR Freq to Voltage
2.1 Pengertian Kecepatan
Kecepatan adalah perpindahan oleh suatu objek tiap satu satuan waktu. Misalkan suatu objek mempunyai kecepatan 10 m/s, artinya tiap satu second objek mengalami perpindahan sebesar 10 m. Pengertian di atas merupakan pengertian secara umum. Pada kenyataanya terdapat bermacam-macam kecepatan. Berikut ini akan dijelaskan tentang kecepatan pada objek berputar.
2.1.1 Kecepatan Linier (kecepatan Tangensial) Objek Berputar
Kecepatan linier objek yang berputar didefinisikan sebagai panjang lintasan (busur) yang ditempuh oleh suatu objek oleh satu satuan waktu. Besarnya kecepatan tangensial adalah
t S
v= ... (2.1)
ketarangan:
v : kecepatan linier objek berputar (m/s)
S : panjang lintasan yang ditempuh oleh objek berputar (m) t : waktu tempuh lintasan
untuk satu putaran, lintasan objek yang berputar sama dengan keliling lingkaran itu sendiri:
R
Bila waktu yang dibutuhkan untuk satu kali putaran adalah T second, maka:
f T dengan T
R
v= 2.π. : = 1
Sehingga: R f
v=2.π. . ... (2.3) ketarangan
T = periode putaran 9s) f = frekuensi (Hz)
Dari persamaan di atas diketahui hubungan antara kecepatan sudut dengan kecepatan liniernya:
ω π
π =
= f R dengan f
v 2. . . 2. .
R
v=ω. ... (2.4) Artinya lininer sebading dengan kecepatan sudut dan sebanding dengan jari-jari putarannya.
2.1.2 Kecepatan Sudut Objek Berputar
Kecepatan sudut berputar atau disebut juga kecepatan anguler objek berputar, didefinisikan sebagai besar perubahan sudut yang terjadi tiap satau satuan waktu. Besarnya kecepatan sudut dapat diperoleh dengan persamaan:
∆θ
ω = ... (2.5)
Untuk satu kali putaran diperoleh perubahan sudut (∆θ) sebesar 2π radian dalam waktu t = T second
Sehingga:
f T dengan T
R 1
;
2 =
= π
ω
maka: f
v=2.π. ... (2.6a) Keterangan:
ω = Kecepatan sudut objek yang berputar (rad/s)
∆θ = Perubahan sudut (rat)
Untuk mendapatkan ω dalam satuan rpm (rotation per minute),
maka:
1 putaran/s = 2π.rad/s = 60 rpm sehingga 1 rad/s = 30/π rpm
maka persamaan 2-6 dapat di ubah menjadi,
ω(rpm) = 60 f ... (2.6b)
keterangan:
2.2 Sensor Putaran Motor
Sensor putaran motor berupa perangkat yang terdiri dari piringan bercelah yang dipasang pada poros motor dan optocoupler yang dilewatkan padanya piringan tersebut, sebagaimana ditunjukkan pada gambar 2.2.
Gambar 2.2. Sensor putaran motor: (a) piringan bercelah, (b) rangkaian
optocoupler
Optocoupler berupa komponen yang terdiri dari dioda inframerah
2.1.1. Kecepatan Putar Motor
Telah diketahui bahwa kecepatan putaran motor dibaca dari celah-celah pada piringan motor yang dilewatkan pada optocoupler. Kecepatan dinyatakan dengan :
n = dalam satuan rotasi per menit ( rpm )
buka waktu
detik 60 celah
jumlah
n ditampilka yang
angka
n= •
2.3 Pembagi Frekuensi
Pembagi frekuensi digunakan untuk mendapatkan frekuensi yang diinginkan. Frekuensi yang diinginkan tergantung pada pencacah yang digunakan, misalnya pencacah 6 berarti akan menurunkan frekuensi dan time base menjadi 1/6 dari frekuensi semula. Sama halnya untuk pencacah modulo 10, 1/10 dari frekuensi semula.
Penurunan frekuensi dilakukan dengan cara seperti pada gambar 2.3 berikut:
Frekuensi awal Pembagi frekuensi Frekuensi hasil Frekuensi dari
Pewaktu dasar (X Hz)
Pencacah dengan modulo Y
Frekuensi akhir (X/Y Hz)
2.4 Gerbang Logika Dasar 2.4.1 Gerbang AND
Gerbang AND mempunyai dua atau lebih masukan dan satu keluaran. Keluaran dari gerbang AND akan bernilai logika 1 jika semua masukan bernilai juga logika 1. Oleh karena itu gerbang AND
kadang-kadang juga disebut ”gerbang semua atau tidak”.
Simbol logika gerbang AND dua masukan dapat dilihat pada gambar 2.4 di bawah ini.
Gambar 2.4. Simbol logika gerbang AND
Dalam Aljabar Boolean, persamaan untuk gerbang AND dapat ditulis sebagai berikut :
Y = A • B ... (2.7)
AND2
A
B
Y
Tabel 2.1
Tabel kebenaran untuk gerbang AND dua masukan
B A Y
0
0
1
1
0
1
0
1
0
0
0
2.4.2 Gerbang NOT
Semua gerbang logika diatas mempunyai paling sedikit dua masukan dan satu keluaran. Akan tetapi gerbang NOT hanya mempunyai satu masukan dan satu keluaran. Gerbang NOT berfungsi untuk memberikan suatu keluaran yang tidak sama (terbalik) dengan masukan. Jika nilai masukan gerbang NOT bernilai logika 0, maka keluaran akan bernilai logika 1. Sebaliknya jika masukan gerbang bernilai logika 1, maka keluarannya akan bernilai logika 0. Oleh karena itu gerbang NOT sering kali disebut ”pembalik”.
Gerbang NOT disimbolkan seperti pada gambar 2.5 di bawah ini :
NOT
Y A
Gambar 2.5. Simbol logika gerbang NOT
Aljabar Boolean untuk gerbang NOT adalah sebagai berikut :
A
Y = ………...……… (2.8)
Tabel 2.2
Tabel kebenaran gerbang NOT
A Y 0
1
2.4.3 Gerbang NAND
Gerbang NAND terdiri dari dua buah atau lebih masukan dan sebuah keluaran.Gerbang NAND tersusun dari dua gerbang yaitu gerbang NOT dan gerbang AND sehingga keluaran akhir NAND adalah hasil operasi NOT-AND.
Simbol gerbang NAND dapat dilihat digambar 2.6 berikut.
NAND2
Y A
B
Gambar 2.6. Simbol logika gerbang NAND
Aljabar boolean untuk gerbang NAND
B
A
Y
=
•
... (2.9)Tabel 2.3
Tabel kebenaran gerbang NAND
B A A•B
0
0
1
1
0
1
0
1
1
1
1
0
2.5 Rangkaian Generator Basis Waktu
Rangkaian generator basis waktu adalah suatu rangkaian yang
berfungsi untuk menghasilkan lamanya pengukuran dan sekaligus
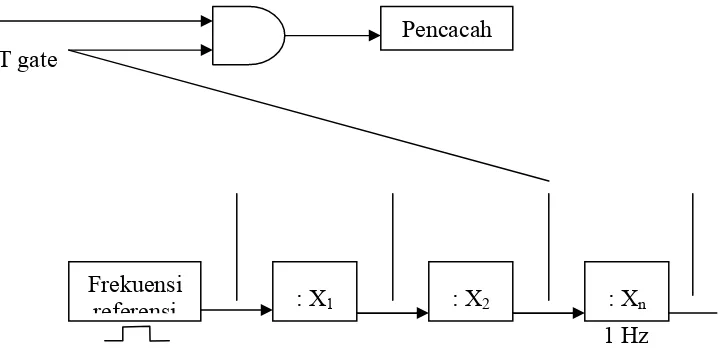
Ketepatan perioda yang dihasilkan oleh basis waktu akan sangat berpengaruh pada pengukuran frekuensi. Rangkaian basis waktu dapat diperlihatkan seperti gambar 2.7. dari frekuensi kecepatan putaran motor DC
T gate
1 Hz Frekuensi
referensi : X1 : X2 : Xn
Pencacah
Gambar 2.7. Diagram basis waktu (time base)
Cara kerjanya: gelombang kotak (pulsa) dari sebuah pembangkit frekuensi dimasukkan ke pembagi atau disebut juga pencacah, sehingga menghasilkan basis waktu. Pulsa-pulsa yang dihasilkan osilator dibagi oleh pencacah X1 sampai Xn. Pembagi X1 sampai Xn membagi frekuensi dasar osilator hingga diperoleh basis waktu yang diinginkan.
Untuk menghasilkan waktu pencacahan yang baik maka pulsa keluaran dari pembangkit frekuensi diharapkan mencapai 1 Hz. Hasil dari
time base ini akan menjadi pulsa bagi penggerbangan.
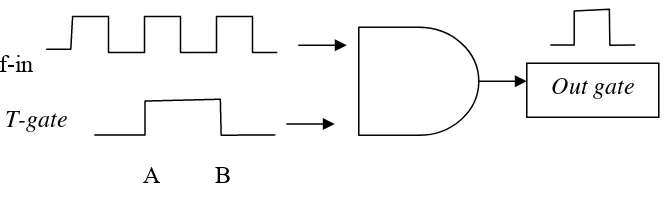
2.6 Penggerbangan
pulsa yang tibapadamasukannya.Gambar 8.memperlihatkan cara sederhana penggerbangan. Gerbang NAND melewatkan pulsa f-in. Pulsa F-in ditempatkan pada masukan NAND yang satu, sedang pada masukan satu lagi pulsa T-gate seperti terlihat dalam Gambar 2.8.
f-in
T-gate
A B
Gambar 2.8. Penggerbangan
Gerbang NAND akan terbuka saat pulsa f-in dan T-gate pada logika tinggi. Bila pulsa masukan T-gate pada logika rendah maka keluaran pada outgate adalah kebalikan dari pulsa f-in.
Waktu pulsa antara A dan B disebut gating time atau waktu buka. Selama waktu buka yang ditentukan, pencacah akan melakukan pencacahan. Waktu buka atau gating time sangat berpengaruh pada pengukuran. Bila
gating time atau waktu buka pengukuran lebih lama maka keakuratan dari
data yang akan diperoleh cukup baik.
Banyaknya pulsa yang dapat dilewatkan oleh gerbang NAND adalah frekuensi yang terukur. Waktu buka yang dipilih akan menentukan banyaknya pulsa yang masuk ke pencacah. Misal gating time yang dipergunakan adalah 1 detik, gerbang NAND dapat melewatkan 50 pulsa, maka frekuensi terukur adalah 50 Hz. Jadi,
(Hertz)
buka waktu
ah yang dicac pulsa
Banyaknya Fterukur =
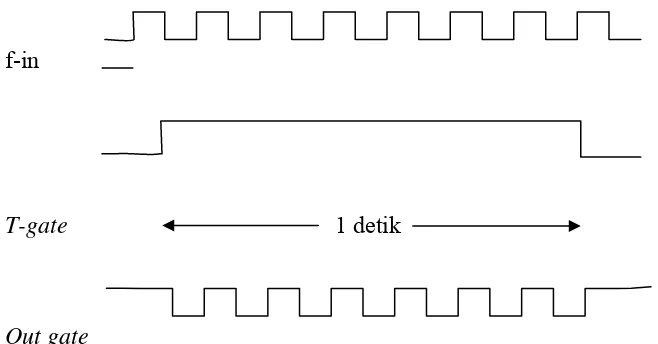
Bentuk gelombang hasil penggerbangan dan rangkaian basis waktu diperlihatkan gambar 2.9 berikut :
f-in
T-gate 1 detik
Out gate
Gambar 2.9. Timing diagram penggerbangan
F-in adalah sinyal dalam bentuk gelombang frekuensi dari media yang diukur, sesudah dibentuk oleh pemicu schmitt, T-gate adalah bentuk gelombang dari gating time yang digunakan dalam pengukuran yang berasal dari rangkaian basis waktu, dan out gate adalah bentuk gelombang keluaran selama waktu buka yang dipilih, selanjutnya menjadi input bagi pencacah dekade dan pencacah biner.
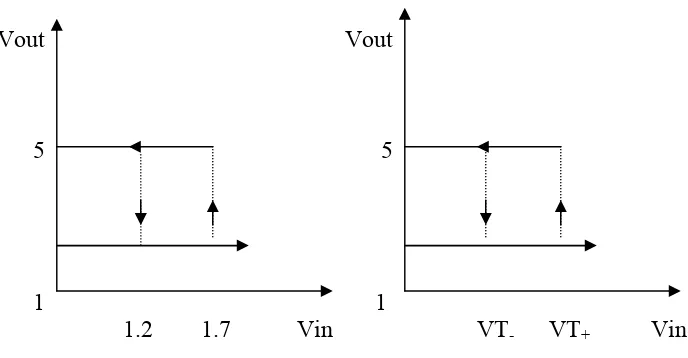
2.7 Pemicu Schmitt
Vout Vout
5 5
1 1
1.2 1.7 Vin VT- VT+ Vin
Gambar 2.10. Karakteristik pemicu schmitt
Nilai Vin yang menyebabkan keluaran berubah dari keadaan rendah ke
tinggi disebut tegangan ambang positip (VT+) dan, demikian sebaliknya Vin
yang menyebabkan keluaran berubah dari keadaan tinggi ke rendah disebut tegangan ambang negatif (VT). Bila Vout berada pada keadaan rendah diperlukan untuk menaikkan Vin sedikit diatas 1,7 Volt guna menghasilkan suatu perpindahan. Setelah berada pada keadaan tinggi Vout tetap. Vout tetap berada pada tegangan 5 Volt sampai Vin menurun sedikit dibawah 1,2 Volt.
Pada saat ini keluaran kembali berubah ke keadaan rendah. Garis putus-putus menandakan perubahan yang sangat cepat.
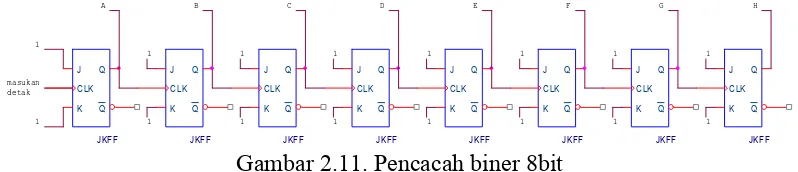
2.8 Pencacah Modulo-256 (8 BIT)
biner dari 00000000 sampai 11111111,seperti yang ditunjukkan gambar 18,dapat disebut sebagai pencacah modulo 256. Modulus dari satu pencacah adalah jumlah hitungan yang dilaluinya.Istilah”modulo” kadang disingkat dengan ”mod”.
Diagram logika dari pencacah modulo 256 yang menggunakan flip-flop JK dapat dilihat pada gambar 18. Mula-mula perhatikan bahwa masukan data J dan K dari flip-flop tersebut digabungkan ke logika 1. Hal ini berarti bahwa masing-masing flip-flop berada dalam mode togel. Kemudian, masing-masing pulsa clock akan menyebabkan flip-flop mentogel ke keadaan berlawanan. Perhatikan juga bahwa, keluaran Q dari FF1 dihubungkan secara langsung ke masukan clock (CK) dari unit berikutnya (FF2),dan seterusnya. A merupakan indikator LSB (Least Significan Bit, bit yang paling kurang penting), sedangkan H merupakan MSB (Most Significan Bit), bit yang paling berbobot.
Pada pencacah digital tak sinkron / asinkron perubahan output flip-flop yang terjadi secara serempak , karena pulsa yang akan dicacah hanya dimasukan pada flip-flop yang terdepan (LSB).Sedang sebagai pulsa clock dari flip-flop yang lain diperoleh dari output flip-flop di depannya.Dengan demikian perubahan dari output flip-flop akan terjadi secara berurutan dari depan ke belakang sehingga disebut ripple counter / free running counter.
1
2.9 Pencacah BCD
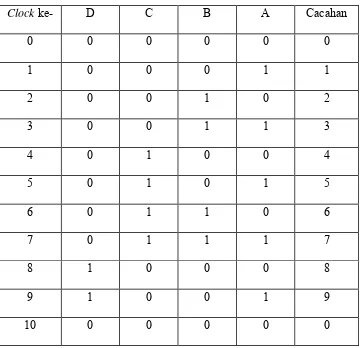
Pencacah BCD merupakan pencacah dekade (mod-10) dengan keluaran 10 keadaan diskrit. Pencacah ini akan menghasilkan sandi BCD (8421) menurut urutan clock yang diberikan. Pada pencacah ini begitu mencapai clock ke 10, cacahan akan dimulai lagi dari nol. Diagram logika dari pencacah ini dapat dilihat pada gambar 2.12.
Gambar 2.12. Pencacah BCD
Pada awal keadaan, pencacah dalam keadaan reset atau 0000. Saat pulsa clock pertama tiba, flip-flop pertama (FF1) mengalami toggle (D=1) sehingga keluaran akhir 0001, pada saat clock kedua tiba maka FF1 mengalami toggle (D0=0) dan menyebabkan FF2 mengalami toggle (D1=1), sehingga keluaran pada clock ke-dua adalah 0010. Demikian seterusnya hingga keluaran pencacah 1010 yang mengaktifkan gerbang AND sehingga pencacah direset ke keadaan awal atau 0000. Tabel kebenaran dari pencacah ini dapat dilihat pada Tabel 4.
CK
CLR
JKFF
J CLK K
Q
Q
CLR JK=1
B D
CLR CLR
C
JKFF
J CLK K
Q
Q
JKFF
J CLK K
Q
Q
A
JKFF
J CLK K
Q
Tabel 2.4
Kebenaran Pencacah BCD
Clock ke- D C B A Cacahan
0 0 0 0 0 0 1 0 0 0 1 1 2 0 0 1 0 2 3 0 0 1 1 3 4 0 1 0 0 4 5 0 1 0 1 5 6 0 1 1 0 6 7 0 1 1 1 7 8 1 0 0 0 8 9 1 0 0 1 9 10 0 0 0 0 0
Dari tabel kebenaran tersebut dapat digambarkan bentuk keluaran sebagai mana diagram waktu pada Gambar 2.13.
2.10Pengancing (D-LATCH)
Rangkaian ini adalah penggerendel D (D latch) yang keluarannya mengikuti masukan pada saat clock tinggi. Jika bit data berubah pada saat
clock tinggi, nilai terakhir D sebelum clock berubah keadaan dari logika
tinggi ke rendah merupakan nilai D yang tersimpan. D Latch dapat dibentuk dari SRFF dan gerbang logika AND dan NOT sebagaimana pada gambar 2.14
C out
D
out S Q
R Q
Gambar 2.14 Rangkaian D Latch
Saat clock rendah (0) keadaan maka keluaran Q tetap. Dan pada saat
clock tinggi (1), keluaran Q mengikuti masukan. Tabel kebenaran bagi D
Latch ini dapat dilihat pada tabel 5.
Tabel 5.
Tabel kebenaran Penggerendel D
D C Q
0 0 0
0 1 Keadaan terakhir
1 0 0
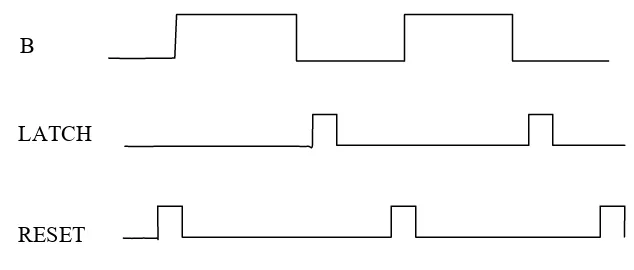
2.11Pengendali LATCH dan RESET
Rangkaian pengendali Latch dan Reset diperlukan untuk mempertahankan nilai yang dibaca selama waktu buka dan mereset cacahan kembali ke awal sesaat sebelum masuk waktu buka berikutnya. Pengoperasian Latch dan Reset dilakukan pada saat pulsa B dalam keadaan rendah. Untuk lebih jelasnya dapat diperhatikan diagram logika pada gambar 2.15.
B
LATCH
RESET
Gambar 2.15 Pulsa Latch dan Reset
Untuk menghasilkan pulsa sempit digunakan kombinasi C dan R sebagai diferensiator dengan tetapan waktu t = R.C, sebagaimana diperlihatkan pada Gambar 2.16.
R
LATCH C
RESET C
R B
2.12Penyandi BCD to 7-Segmen
Sebelum segmen dinyalakan, keluaran system digital harus diubah ke dalam isyarat yang sesuai untuk menyalakan tampilan. Masukan dari sistem digital biasanya dalam bentuk sandi biner (BCD) harus diubah menjadi isyarat tujuh jalur untuk menyalakan masing-masing segmen. Perubahan ini dilakukan oleh penyandi BCD ke tujuh segmen. Sebagai contoh, jika karakter 2 akan ditampilkan, maka jalur keluaran S0, S1, S3, S4, S6 akan
di-SET berlogika satu untuk menghidupkan transistor yang sesuai dengan segmen S0, S1, S3, S4, S6. Jalur yang lain tetap berlogika nol. Tabel 6 menunjukkan jalur-jalur yang harus diaktifkan untuk membentuk karakter yang dimaksud.
2.13Seven Segment
Pada dasarnya penampil tujuh segmen terdiri dari tujuh buah LED
(Light Emmitting Diode). Menurut cara pemberian tegangan, maka suatu
tujuh segmen terdiri dari dua macam, yaitu : common anoda dan common
katoda. Perbedaan antara keduanya hanya terletak pada penyambungan antara LED yang terdapat pada segmen yang satu dengan yang lain. Pada
common anoda, anoda dari ketujuh LED terhubung menjadi satu (gambar
2.17a) sedangkan pada common katoda, katoda dari ketujuh LED yang terhubung menjadi satu (gambar 2.17b) Pada umumnya ketujuh LED pada
seven segment diberi label S0 sampai S6 seperti disajikan pada gambar 2-8.
Ketujuh LED itu merupakan cacahan segmen minimum yang diperlukan untuk menampilkan angka 0 sampai 9 seperti diilustrasikan pada gambar 2.17
a) anoda bersama b) katoda bersama
Gambar 2.17.Penampil tujuh segmen
Gambar 2.19.Tujuh segmen dalam digit desimal
Kecerahan LED tergantung dari arusnya. Idealnya, cara terbaik untuk mengendalikan kecemerlangan ialah dengan menjalankan LED dengan sumber arus. Cara berikutnya yang terbaik setelah sumber arus adalah dengan tegangan catu yang besar dan resistansi seri yang besar. Dalam hal ini, arus LED diberikan oleh :
s led cc
R V V
Vc c
R s
I led
D1 LED
Gambar 2.20. Rangkaian LED
Makin besar tegangan sumber, makin kecil pengaruh Vled. Dengan kata lain
Vcc yang besar menghilangkan pengaruh perubahan pada tegangan LED.
2.14Digital to Analog Converter (DAC)
DAC adalah rangkaian yang mengubah tegangan biner digital menjadi
log. Ada banyak bentuk rangkaian DAC ini, yang biasanya sudah terpaket
pada satu keping IC. DAC terdiri dari rangkaian jaringan resistor dan
penguat penjumlah atau disebut juga konveter arus ke tegangan (I to V
Converter, IVC). Jaringan resistor yang dipakai biasanya jaringan R-2R sebagaimana ditunjukkan pada gambar 2.20. Pada saat saklar D1 dihubung
singkat maka besarnya arus keluaran meningkat dua kali dari arus pada saat
R R
Gambar 2.21. Dasar rangkaian DAC 8 bit
Dengan jaringan resistor R-2R akan didapatkan kenaikan yang sama
setiap tingkatnya. Biasanya DAC sudah terpaket dalam satu keping IC
sebagaimana ditunjukkan pada Gambar 29.Do merupakan masukan LSB dan
D7 sebagai masukan MSB. Dengan masukan sebanyak n bit didapatkan 2n
tingkat keluaran. Sehingga dengan masukan sebanyak 8 bit akan didapatkan
256 tingkat keluaran.
Vref
Besar atau kecilnya arus keluaran (Io) DAC tergantung atas keadaan masukan logika 1 dan 0. Arus dari IC DAC sebesar :
)
Io : Arus keluaran konverter DAC (dalam A) Rref : Resistor Referensi (dalam Ohm)
Vref : Tegangan Referensi (dalam Volt)
D0-D7 : sinyal-sinyal masukan biner
Persamaan di atas dapat disederhanakan menjadi:
)
dengan N : bobot masukan desimal
2.15Penguat
2.15.1 Penguat Penjumlah (Summing Amplifier)
Penguat penjumlah dapat dibentuk dari penguat inverting, dimana bisa menjumlahkan dua atau lebih masukan-masukan bebas
(independent). Rangkaian penguat penjumlah untuk dua masukan
dapat diperlihatkan dalam Gambar 2.22
R1
Penguat penjumlah untuk masing-masing masukan berdasarkan persamaan:
Penguat tegangan pertama
1 1
R R
V V
A f
i o
V = =− ... (2.12) Penguat tegangan kedua
2 2
2
R R
V V
AV = o =− f ... (2.13)
Sehingga tegangan keluarannya adalah penjumlahan dari persamaan (2.12) dan (2.13)
⎟⎟ ⎠ ⎞ ⎜⎜
⎝ ⎛
+
= 2
2 1 1
V R R V R R
Vo f f ... (2.14)
Dengan harga (R) semua sama, maka persamaan (2.15) menjadi :
Vo = - (V1 + V2)... (2.15)
2.15.2 Penguat Pembalik (Inverting)
Sebuah penguat menerima arus atau tegangan kecil pada masukannya dan menbangkitkan arus atau tegangan yang lebih besar pada keluarannya, keluarannya dikendalikan sebagai fungsi daripada masukan.
Penguat membalik op-amp dasar diperlihatkan dalam Gambar 2.24
VOUT
3 2
7
4
6
+
-V+
V-OUT
VIN
Ri
Rf
Gambar 2.24 Penguat membalik
Penguatan tegangan dalam rangkaian penguat membalik ditentukan menurut
i o
V V
Av= ... (2.16)
Sementara faktor penguatan dalam modus loop tertutup untuk penguat membalik dinyatakan dalam
Ri Rf
Av=− ... (2.17)
Tegangan keluaran diperoleh dengan jalan mengalikan tegangan masukan yang diketahui dengan faktor penguatan, atau
Vo = - (Av . Vi)
i i f
V R R
Vo ⎟⎟
⎠ ⎞ ⎜⎜ ⎝ ⎛ −
= ... . (2.18)
2.16Pengendali
Pengendali adalah elemen yang mendeteksi perbedaan antara keluaran yang dikehendaki dengan keluaran aktual.
2.16.1 Kendali Proportional
Apapun wujud mekanisme yang ada dan apapun bentuk daya penggeraknya, kendali proporsional pada dasarnya merupakan penguat dengan penguatan yang dapat diatur. Gambar 2.25 merupakan rangkaian dari kendali proporsional.
+
Gambar 2.25 Rangkaian kendali proporsional
Sehingga dari gambar 2.25 diperoleh persamaan sebagai berikut :
( )
inatau dalam transformasi laplace,
Misal sinyal keluaran dari sistem kendali proporsional adalah m(t) dan sinyal kesalahan penggerak adalah e(t) maka :
m(t) = Kp . et
atau dalam transformasi Laplace,
E(s) M(s)
Kp
M(s) = Kp . E(s)
p
K s E
s
M =
) (
) (
Kp merupakan konstanta pengendali proporsional atau penguatan.
2.16.2 Kendali Integral
Sedangkan rangkaian kendali integral ditunjukkan pada gambar 2.26 dibawah ini.
-12
C
R
Vin
+
-V+
V
-out
+12
Vout
Gambar 2.26 Rangkaian kendali integral
Dari gambar 2.26 diperoleh persamaan seperti berikut ini :
∫
−
= V t dt
RC t
Vout( ) 1 in( ) ... (2.20)
dt
Dalam transformasi Laplace,
)
Pada kendali dengan aksi kendali integral, nilai keluaran kendali m(t) diubah dengan laju yang sebanding dengan sinyal kesalahan penggerak e(t) sehingga:
m(t) = Ki∫ e(t)dt
atau dalam transformasi Laplace,
E(s) M(s)
Ki merupakan konstanta integrasi yang dapat diatur. Jika nilai sinyal
kesalahan penggerak e(t) diduakalikan, maka nilai sinyal keluaran m(t) berubah dengan laju perubahan menjadi dua kali semula. Jika
kesalahan penggerak e(t) nol, maka nilai keluaran m(t) tetap stasioner.
2.16.3 Kendali Proportional Integrator
Sedangkan gabungan dari kendali proporsional dan kendali integral disebut kendali proporsional integral.
V1
Vin
Vi Vout
P
I
(a)
+
-V+
V-out
R7
A2
-12
+
-V+
V
-out
Vout
A1
R3
Vin
R2
+
-V+
V-out
-12
Cf
-12
+12 Vi
+12
R1
+12 Vp
R6
A3
(b)
Gambar 2.27. a) Diagram kotak kendali proporsional integral b) Rangkaian kendali proporsional integral Dari gambar 2.27 diperoleh suatu persamaan :
( )
( )
⎟⎟Aksi kendali dari kendali proporsional integral dapat didefinisikan sebagai berikut :
M(t) = Kp . e(t) +
Atau dalam besaran transformasi Laplace,
E(s) Kp : konstanta proporsional
Ti : waktu integral = R.C
e(t) : sinyal kesalahan penggerak
Waktu integral Ti mengatur aksi kendali integral, sedangkan
penguat Kp mempengaruhi baik bagian proporsional maupun bagian
2.17Penggerak Motor
Penggerak motor diperlukan untuk menggerakkan motor adalah penguat arus karena arus yang keluar dari penguat pembalik hanya kecil kurang kuat untuk memutar motor dc.
Gambar rangkaian penguat arus yang digunakan dapat dilihat pada Gambar 2.27
Q1
BD239C
MOTOR DC
-+
-V+
V-out
Vcc +15V
+
Gambar 2.28 Rangkaian Penguat Arus
Dari rangkaian pada gambar 2.28 dapat diperoleh dari persamaan
Vcc – Vce – Ie.Re = 0 ... (2.22) Dengan
Vout = Vin ... (2.23) Maka
IRE = Ie = Re
Vout
... (2.24)
2.18Motor DC
Rangkaian ekivalen motor dc dapat dilihat pada gambar 2.28.
R
Es
Eo I
V1
Gambar 2.29. Rangkaian ekivalen motor DC
Arus I yang mengalir pada rangkaian tersebut adalah:
R E E
I= s − 0 ... (2.25)
Eo adalah tegangan induksi yang disebut sebagai
counter-electromotive force (cemf), yang senantiasa berlawanan dengan tegangan
sumber Es. Pada saat motor tidak berputar (the motor is rest), maka besarnya
Eo = 0, sehingga arus yang dibutuhkan untuk starting sebesar
R E
I= s ... ... (2.26)
Pada saat putaran motor meningkat, tegangan Eo juga akan meningkat
sehingga menghasilkan tegangan selisih (Es – Eo).
BAB III
PERANCANGAN ALAT
Pada dasarnya alat yang dirancang mempunyai sistem seperti yang digambarkan pada diagram blok gambar 3.1. yang terdapat 2 blok yaitu rangkaian utama dan rangkaian tambahan.
PENCACAH BCD PENAMPIL PENGUBAHBCD KE
7-SEGMEN
E
+
-PENGONTROL
PENCACAH BINER PENGUNCI
RANGKAIAN TAMBAHAN
Set Point
SENSOR
PENGUNCI
MOTOR DC
DAC
KENDALI LATCH DAN RESET RANGKAIAN UTAMA
TIME BASE 1 DETIK
Gambar 3.1. Diagram blok rangkaian pengubah frekuensi kecepatan motor DC menjadi tegangan DC pada aplikasi pengatur kecepatan motor DC
3.1. Sensor Putaran Motor
Dalam perancangan sensor putaran motor ini dibuat piringan dengan 60 celah sebagai penghalang sinar inframerah. Dengan demikian sekali motor berputar akan dibaca sebanyak 60 pulsa. Sedangkan untuk optocoupler
digunakan divais H21A2 spesifikasi dari komponen ini adalah sebagai berikut:
a. Arus maju maksimum Dioda Inframerah (Id) 60 mA
b. Tegangan maksimum Dioda Inframerah (Vdioda) 1,7 V
c. Arus maksimum CE fototransistor 100mA
Foto transistor akan aktif jika terkena sinar dari dioda inframerah, sehingga keluaran pemicu menjadi rendah, sebaliknya jika sinar terhalang keluaran pemicu Schmitt akan tinggi.
Rd 330
74LS14 H21A2
5V
Rc 1K
Vo
Gambar 3.2 Gambar Sensor Putaran Motor
Untuk menentukan besarnya hambatan pada dioda inframerah digunakan hubungan :
d dioda cc
d
I V V
R = −
Dengan mengambil Vcc = 5 V, Vdioda = 1,7 V dan Id = 10 mA, maka
besarnya Resistor R1 sebesar:
Ω
Sedangkan untuk menentukan besarnya hambatan Rc, diketahui bahwa
arus maksimum adalah 100 mA, diambil arus 5 mA. Dengan menganggap arus Ic = Ie maka kondisi keluaran maksimal ketika VCE = 0, didapatkan :
Pemicu Schmitt menggunakan gerbang NOT IC 74LS14 dengan menghubungkan masukannya pada keluaran transistor. Pada saat keluaran transistor tinggi maka keluaran pemicu ini rendah begitu sebaliknya. Gambar rangkaian diperlihatkan pada Gambar 3.2
3.1.1 Kecepatan Putaran Motor
Pada perancangan dalam membaca kecepatan putaran motor, digunakan celah sebanyak 60 buah, sehingga dalam satu putaran didapatkan 60 pulsa. Kecepatan yang dihasilkan sebesar untuk waktu buka selama 1 detik adalah :
rpm
Sehingga besarnya kecepatan putaran sebesar tampilan tujuh segmen lama dengan nilai kecepatan motor.
3.2Pewaktu Stabil
Frekuensi yang diinginkan pada pewaktu ini adalah 1 Hz sehingga akan menghasilkan periode sebesar 1 detik. Dengan memanfaatkan frekuensi jala-jala PLN yang terdapat pada transformator maka didapatkan frekuensi stabil yang besarnya 50 Hz.
Frekuensi stabil 50 Hz agar didapatkan frekuensi sebesar 1 Hz maka harus dibagi 10 kemudian dibagi 5 dengan menggunakan 2 buah IC 4017. Agar pulsa keluaran 1 Hz berbentuk pulsa kotak maka dilewatkan sebuah
Schmitt triger 74LS14.
OUT
Gambar 3.3 Gambar Rangkaian Pewaktu Stabil
3.3 Rangkaian Basis Waktu dan Penggerbangan
Pewaktu stabil mempunyai frekuensi keluaran 1 Hz, ini berarti mempunyai waktu periode sebesar 1 detik. Penggerbangan suatu pencacah berarti menghidupkan hanya selama 1 periode. Dan dalam periode ini pencacah akan mencacah banyaknya pulsa yang masuk (tiba pada masuknya) pulsa ini akan dilewatkan selama waktu buka (gating time). Penggerbangan
yang dilakukan menggunakan IC TTL 74LS132 yaitu gerbang NAND dengan 2 masukan. Satu masukan berasal dari frekuensi kecepatan motor yang lain sebagai pengontrol lamanya penggerbangan. Pada perancangan ini memilih waktu buka selama 1 detik.
Gambar 3.4 Rangkaian Basis Waktu dan Penggerbangan ke pencacah
FIN
FIN
74LS132
1
2
3
14
7
-OUT
1 detik
+
T GATE
3.4 Rangkaian Pengendali Latch dan Reset
Latch dan reset bekerja setelah pencacah mencacah selama waktu yang ditentukan, ini berarti terjadi ketika pulsa rendah dari pembagi frekuensi. Pada perancangan kali ini digunakan gerbang logika NAND 4011 untuk menghasilkan kedua keluaran tersebut. Agar keduanya bisa bekerja dengan cepat diperlukan kombinasi R dan C, sebagaimana ditunjukkan pada Gambar 3.5.
1/4 4011 R1
1K
C1
R2 1K
B
10uF
1/4 4011
C2
1/4 4011 10uF
RESET LATCH
Gambar 3.5 Rangkaian Pengendali Latch dan Reset
Waktu tinggi yang diperlukan sebesar 0,01dt dengan mengambil C =
3.5Rangkaian Pencacah Biner
Pada rancangan ini digunakan pencacah biner 8 bit up Counter
Asyncron Modulo 256 yang bekerja untuk mengurutkan data dari 0000 0000
sampai 1111 1111 (desimal 0 sampai 255). Karena keluaran dari frekuensi kecepatan motor setelah dilakukan pengukuran sebesar 2700 rpm. Maka angka tersebut dibagi 10 menggunakan IC 4017 agar pencacah mampu bekerja dengan baik.
Pada rancangan ini digunakan IC 4040 yang merupakan pencacah asinkron. Ini berarti pulsa masukan hanya diberikan pada flip-flop pertama dan flip-flop berikutnya hanya menerima output flip-flop sebelumnya.
IC 4040 tersusun dari 12 master-slave flip-flop. Dalam rancangan ini IC hanya digunakan sampai modulus 256 (8 bit) sehingga pada Qg
dihubungkan ke reset, hal ini dapat dilihat pada Gambar 3.6
Gambar 3.6 Rangkaian IC 4040
3.6Rangkaian Pencacah BDC Hingga Penampil
Pencacah yang digunakan dalam perancangan ini adalah pencacah modulo-10 atau yang disebut juga pencacah decade. Pencacah ini digunakan adalah pencacah modulo-10 tak serempak. Pencacah jenis ini merupakan pencacah yang paling banyak digunakan. Pencacah modulo-10 dibangun atas 4 buah J – K flip-flop. Pencacah dekade yang digunakan IC TTL 74LS90 yang mencacah dalam sandi 8421 atau dalam biner dari 0000 sampai 1001.
Untuk mencacah frekuensi sampai 2700 hertz maka setidaknya dibutuhkan 4 buah pencacah dekade. Pada perancangan ini pencacah dekade yang dipakai adalah pencacah serial yang berarti keluaran dari IC TTL 74LS90 sebelumnya menjadi masukan (pulsa lonceng) pada IC TTL 74LS90 selanjutnya. Rangkaian pencacah ditunjukkan oleh Gambar 3.7
Qc
Gambar 3.7 Rangkaian Pencacah Dekade
Sebelum data hasil pencacah ditampilkan, data hasil pencacahan tersebut terlebih dahulu dikirimkan ke pengunci yang direpresentasikan oleh IC TTL 74LS75. Data hasil pencacahan pada IC ini akan disimpan sementara rangkaian penampil digital yang dibangun dalam perancangan ini dengan menggunakan 4 buah penampil dengan kapasitas jangkauan 9.999 Hz. Penampil tersebut dihubungkan dengan penggerak dekoder to seven segment seperti terlihat dalam gambar 3.8
Masukan pencacah bereaksi terhadap periode yang negatif. Apabila pencacah pertama telah mencapai cacahan ke sepuluh (1001) maka pencacah akan kembali ke kondisi semula (0000). Pada saat transisi denyut tersebut pencacah kedua berubah keadaan. Jalan masuk data pada pencacah dibumikan
atau diberi logika rendah (pin 6, 7) dan jalan masuk beban (pin 3) diberi masukan tinggi untuk fungsi pencacahan dengan cacahan awal (0000). Jalan masuk reset pencacah aktif pada logika high (1) dengan denyut reset yang diberikan oleh rangkaian kendali seperti terlihat dalam Gambar 3.5.
Denyut reset akan me-reset pencacah untuk memulai proses penghitungan jumlah denyut yang masuk dari pintu penggerbangan. Denyut
latch dari rangkaian kendali digunakan untuk mengambil dan menyimpan data
hasil cacahan dari rangkaian pencacah 74LS90. Rangkaian latch direalisasikan dengan IC TTL 74LS75 yang menerapkan flip-flop D, pada saat denyut latch
berada logika tinggi, maka data pada jalan masuk akan diteruskan ke jalan keluar, dan apabila latch pada logika rendah, maka data akan disimpan sementara.
Gambar 3.8.Rangkaian Pengunci Hingga Penampil
Denyut latch dan reset tersebut dikendalikan oleh rangkaian kendali sesuai dengan waktu buka yang diberikan generator basis waktu. IC 74LS347 berfungsi untuk men-dekoder data biner 4 bit dari keluaran register penyangga 74LS75 ke dalam bentuk desimal yang kemudian ditampilkan dalam penampil
seven segment. Seven segment yang digunakan dalam perancangan ini adalah
common anode karena keluaran IC 74LS347 aktif rendah.
Dari gambar 3.8. dapat dilihat antatara 74LS347 denganseven segment
terpasang resistor. Hal itu dimaksudkan agar arus yang masuk pada seven
segment tidak melebihi ambang diperbolehkan yaitu sebesar 20 mA. Dengan
tegangan 5 Volt dan arus maksimum, maka nilai resistor diperoleh dari : Ω
165 mA
20 V 1,7 V 5 I
∆V R
max
= −
= =
Dengan : R = hambatan (Ω)
∆V = selisih tegangan (Volt)
Imax = arus maksimum LED (amper)
Dari perhitungan di atas dapat dilihat bahwa dengan nilai R yang kecil akan menyebabkan nilai I menjadi besar , maka perancangan ini digunakan nilai R sebesar 300 Ω.
3.7 Konverter Digital ke Analog (DAC)
Pada blok rangkaian ini dibuat dengan konfigurasi yang umum digunakan dengan IC MC 1408, sebagaimana ditunjukkan pada Gambar 3.9
D4
Gambar 3.9. Perancangan Rangkaian DAC
Tegangan referensi adalah +5 Volt, maka pin 15 harus dihubungkan ke ground. Untuk menekan osilasi tegangan yang timbul pada Vee (-12 V) maka diperlukan kapasitor yang dihubungkan dengan pin kompensasi (pin 16).
Pada perancangan DAC ini diharapkan tegangan keluaran mempunyai jangkauan 0 V sampai 5 V. Dengan menerapkan persamaan 2.20.
f o.R
I
VI= ... (3.1) dengan mengambil Rf = 4,7.103Ω, maka dapat diketahui besarnya arus-arus
yang mengalir dari keluaran pin 4 IC MC 1408 pada saat keluaran maksimum 5 V yaitu :
Menurut persamaan 2.20 besarnya arus keluaran dari IC MC 1408 adalah :
Tegangan referensi (Vref) yang digunakan sebesar 5 V, maka
Sehingga didapatkan tahanan referensi (Rref) sebesar 4680,89 Ω atau
4,68 KΩ. Digunakan potensiometer sebesar 5 KΩ.
Arus yang masuk melalui masukan biner (Ii) ditentukan minimum
sebesar 1 mA, maka digunakan tahanan masukan (Ra-h) sebesar
KΩ
Pada penerapannya diambil tahanan sebesar 4,7 KΩ, sehingga arus yang masuk sebesar
A
Dengan menyusun ulang persamaan 3.1. dan persamaam 3.2 serta memasukkan nilai-nilai komponen yang diperoleh didapatkan
Dengan memasukkan nilai N yang berbeda maka akan didapatkan besarnya V1 sesuai dengan besarnya bobot masukan. Sebagai contoh pada masukan 01111111 mempunyai bobot desimal N = 127, maka besarnya VI adalah
V1 = 0,0196 (127) = 2,4892 V
Tabel 3.1. menunjukkan besarnya keluaran DAC menurut perhitungan pada persamaan 3.3 dan arah putaran yang diharapkan.
Tabel 3.1. Keluaran DAC
Masukan ∆/V V1(Volt)
00000000 01111111
1 127
0 2,4892
10000000 128 2,5089 10000001
11111111
129 255
2,5284 4.998
3.8 Penguat Penjumlah (Summing Amplifier)
Pada rancangan ini penguat penjumlah digunakan untuk menjumlahkan 2 masukan tegangan yaitu tegangan yang satu berasal dari set
point dan yang lain berasal dari keluaran DAC.
Di rancangan ini tegangan set point (V1) dirancang dari 0 sampai 5 V,
sehingga digunakan potensiometer yang berfungsi sebagai pengatur tegangan yang diinginkan. Dengan membuat masukan V2 beda tegangannya dan nilai R
dianggap semua sama maka dihasilkan sebuah penjumlah beda.
Rf 1K
V2
+ Rpot 10K
R1 1K
+
- LM741
3 2
6
7 1
4 5
VCC 5V
Vo
-R2 1K
Gambar 3.10 Gambar Rangkaian Penjumlah Beda
Maka bisa diketahui nilai V0 akan sama dengan V0 = - (Vset point-V2)
3.9 Penguat Proporsional
Karena penguat proporsional integral merupakan gabungan dari penguat proporsional dan penguat integral (integrator) maka penguat ini mempunyai dua mode yaitu mode P dan mode I.
Diinginkan nilai penguatan dari kendali proporsional (Kp) adalah 1 kali.
Kp = 1
Dari persamaan (2-7) :
1 R R
R R K
V x R R V
1 2
1 2 p
in 1 2 p
= = =
Jika R2 = 100 KΩ
Ω
Karena R2 merupakan hambatan yang besarnya sama dengan R1 sehingga nilai
penguatan/konstanta pengendali proporsional juga dapat diketahui 1 kali. Rancangan dari rangkaian kendali proporsional dapat dilihat pada Gambar 3.15.
Gambar 3.11. Rangkaian Penguat Proporsional
3.9.1 Penguat Integral
Sedangkan pada rangkaian penguat integral diinginkan mempunyai penguatan sampai 1 kali, sehingga nilai dari hambatan R4
dan capasitor Cf dapat diketahui.
Ditentukan nilai dari hambatan R = 100 KΩ
µF 10
KΩ 100
1 R
1 C maka, f
= = =
sehingga,
f i
i i
R.C T
T 1 K
= =
karena Ti = 1 maka Ki = 1
Besar kecilnya waktu Ti berpengaruh pada kecepatan tanggapan sistem
terhadap masukan. Hal ini ditunjukkan dalam gambar berikut ini. E(t)
RC
t
Untuk mengubah nilai penguatan kendali integral sampai 1 kali maka nilai dari hambatan R diambil nilai 0,1 MΩ. Semakin besar nilai hambatan R maka nilai penguatannya akan semakin kecil.
Saat R = 0,1MΩ, maka konstanta pengendali integral = 1 kali Sehingga rangkaian penguat integralnya adalah sebagai berikut :
Vin
Gambar 3.12. Rangkaian Penguat Integral 3.9.2 Penguat Proporsional Integral
Pada perancangan rangkaian penguat proporsional integral dengan penguat penjumlah ini diinginkan penguatan untuk keluaran kendali proporsional (Vp) adalah besar 1 kali dan untuk penguatan
keluaran kendali integral (Vi) adalah sebesar 1 kali. Keluaran dari
kendali proporsional dikalikan dengan 1 dan keluaran dari kendali integral dikalikan dengan 1 baru kemudian dijumlahkan sehingga akan diperoleh penguatan maximal sebesar 2.
Untuk kendali proporsional : - 1 R
Sehingga tegangan keluaran dari kendali proporsional adalah :
Karena tegangan masukan adalah antara –5 sampai 5 volt maka tegangan keluarannya antara –5 sampai 5 volt.
Sehingga besar penguatan dari kendali proporsional adalah 1. Untuk kendali integral :
1 R R
6 7 =
Jika R7 = 10 KΩ
KΩ
10 1
KΩ
10 1 R
R 7
6
= = =
maka nilai hambatan R6 = 10 KΩ
f i
i i
R.C T
T 1 K
= =
karena dalam perancangan nilai Ti sampai 1 maka nilai dari konstanta
pengendali integral berkisar 1. M(t) a
b a : output integral b : output proporsional
E(t) Gambar 3.13. Hubungan antara input dan output pada kendali PI
Semakin besar nilai dari Kp dan Ki maka nilai tegangan
keluarannya juga akan semakin besar. Hambatan R2 pada rangkaian
proporsional digunakan untuk mengatur besar kecilnya penguatan pada kendali proporsional dan hambatan R pada rangkaian integral digunakan untuk mengatur besar kecilnya penguatan pada kendali integral.
A2
Vin
10uF
Vout
10K
0,1M
-12
-12
R4
A1 100K
10K R3
Cf
+12
Vp
A3
+
-V+
V-out
-12
R2
+
-V+
V-out
+12
R1
R7
10K
+12 Vi
R6 100K
+
-V+
V-out
Gambar 3.14. Rangkaian Penguat Proporsional Integral
BAB IV
DATA DAN PEMBAHASAN
Pada bab ini akan dibuktikan hasil perancangan dengan menampilkan beberapa data hasil percobaan beserta analisa dengan membandingkan antar data percobaan alat dan pengukuran.
4.1 Hasil akhir perancangan
Pada gambar 4.1 tampak sebuah alat pengubah kecepatan putar motor dc dan pencacah frekuensi serta pengontrol kecepatan motor DC. Roda cacah yang terpasang pada motor dibuat dari piringan CD yang diberi celah kemudian dipasang sensor untuk mendeteksi putaran motor.
Gambar 4.1 Hasil akhir rancangan
Pada tampilan terlihat sebuah digital voltmeter dan 4 digit seven
segment untuk tampilan digital.
Untuk mendapatkan hasil perhitungan putaran motor yang sesungguhnya maka perlu diketahui besarnya frekuensi putaran motor DC. Maka gunakan sebuah osiloskop digital untuk mengetahui besarnya kecepatan motor sesungguhnya. Pengukuran dengan osiloskop digital inilah yang dijadiakan acuan dalam pengambilan data.
57
4.2 Data Kecepatan Putar Motor DC
Percobaan 1
Gambar 4.2. Gambar Sinyal Output Sensor Kecepatan Motor DC Dengan Vi = 3,5 V.
Dari gambar 4.2.
Diketahui perioda ( T2) = 594,6 uS.
Maka frekuensi kecepatan motor dc = 1 : 594,5 uS. = 1681,8 Hz. Rpm = Fin
= 1681,8 rpm.
Percobaan 2
Gambar 4.3.Gambar Sinyal Output Sensor Kecepatan Motor DC Dengan Vi=4 V. Diketahui Perioda ( T2 ) = 466,8 uS.
Frekuensi kecepatan motor dc = 1 : 466,8 uS. = 2142,2 Hz.
Rpm = Fin.
= 2142,2 rpm.
4.3 Perbandingan Pengukuran Kecepatan dengan Osiloskop Digital dan Hasil Perancangan Sistem
Sesuai dengan perancangan, tegangan masukan 0 sampai 5 volt akan dikalibrasi dalam skala kecepatan putaran motor DC rotation per minute
(rpm).
Persamaan yang dipakai untuk memperoleh kecepatan putarannya adalah:
Rpm = x ik
h jumlahcela
Fin
det 60
Karena jumlah celahnya 60 buah, maka persamaannya dapat disederhanakan menjadi:
Rpm = Fin ………...…(4-1)
Dari percobaan diketahui bahwa pada putaran rendah terjadi ripple
rpm yang lebih besar atau dengan kata lain peritungan kecepatan motor oleh sensor kecepatan ini lebih stabil pada putaran tinggi. Hal ini juga dikarenakan motor kurang stabil pada putaran rendah.
Tabel. 4.1 Perbandingan antara data percobaan pada tampilan digital dengan pengukuran menggunakan Osiloskop Digital.
No Vi (volt) Pengukuran dengan
Osiloskop Digital (rpm)
Pengukuran Hasil Rancangan
(rpm)
Frekuensi putar motor
( Hz )
1 3.0 1384 1383 23
2 3.1 1448 1441 24
3 3.2 1492 1488 24
4 3.3 1518 1514 25
5 3.4 1592 1558 25
6 3.5 1741 1730 28
7 3.6 1810 1805 30
8 3.7 1854 1840 30
9 3.8 1896 1890 31
10 3.9 1926 1925 32
11 4.0 2124 2115 35
12 4.1 2162 2190 36
13 4.2 2262 2262 37
14 4.3 2298 2297 38
15 4.4 2361 2350 39
16 4.5 2384 2380 39
17 4.6 2412 2412 40
18 4.7 2416 2413 40
19 4.8 2420 2415 40
20 4.9 2421 2418 40
21 5.0 2428 2424 40
Pada percobaan 1 sampai 21 data diambil dengan masukkan frekuensi dari putaran motor. Jika motor DC yang terpasang memiliki kecepatan maksimal 2428 rpm, maka tidak dapat membuktikan bahwa alat ukur mampu mengukur hingga kecepatan 9999 rpm. Untuk membuktikan harus ada masukan frekuensi tertentu dari AFG.
Berikut adalah grafik yang menunjukkan perbandingan antara pengukuran osiloskop digital dengan percobaan.
0 500 1000 1500 2000 2500 3000
1000 1200 1400 1600 1800 2000 2200 2400
lxxxi
Hasil Perco
b
aan ( rp
Hasil Pengukuran Dengan Osiloskop Digital ( rpm )
Gambar 4.4.Grafik Perbandingan Pengukuran Osiloskop Digital dengan percobaan
4.5.1 Perhitungan Kesalahan Pengukuran pada Tampilan Digital
Hasil pengukuran pada tampilan digital juga masih memiliki kesalahan. Dengan melihat tabel 4.2 di atas, perhitungan kesalahan dapat dilakukan dengan persamaan.
E = 1 rpm pengukuran – rpm tampilan digital……… (4-2)
ε = .100%
ran rpmpenguku
galat
Keterangan:
E = galat (true error)
ε = Persen galat
Contoh perhitungan kesalahan pengukuran pada tampilan digital untuk Percobaan I :
Rpm tampilan digital = 1383 Rpm pengukuran = 1384 Maka :
ε = .100% 0,07 1384
1
= rpm
Hasil perhitungan kesalahan pengukuran pada tampilan digital untuk tiap percobaan tampak pada tabel 4.2. berikut:
Perhitungan Kesalahan Percobaan Pengukuran
osiloskop digital (rpm)
Tampilan digital
E (rpm) ε (%)
1 1384 1383 1 0,07 2 1448 1441 7 0,48 3 1492 1488 4 0,26 4 1518 1514 4 0,26 5 1592 1558 34 2,13 6 1741 1730 11 0,63 7 1810 1005 5 0,27 8 1854 1840 14 0,75 9 1896 1890 6 0,31
10 1926 1925 1 0,07
11 2124 2115 9 0,42
12 2198 2190 8 0,36
13 2262 2262 0 0