DESAIN
SISTEM
KONTROL
SUHU TJNTTJKPEMBIUSAN
UDANG WINDU
(Penaeusnonodon
Fab.)
SECARA
BERTAHAP
DENGAN
LOGIKA
FUZZY
Ardiansyahr , sam Herodian'?, Budilndra setiawanr
Jurusan Teknik Pefianian, FATETA
-
IPBKampus IPB Darmaga PO Box 220 Bogor 16002 E-mail : [email protected]
Abstruct
Problen solying wing
fuae
logicis
based on the n^ture that lhe k€J eletnet
it1 hurnnthougllt is not stated in nunber,
but
stared according ta the |abehin
fuzzy sets. The AppLicationaf
Juzq
logiccantrol rrill
reduce
rc Jluctuetiort whichis
usually occurin
on-of one.
The fonner resedrch hds shawntllat
there'sa
certain
systenxfor
tiqer
shrinp
(Petaeus monadon Fab) dnaestheting boa. The temperature rcducfion rclativelJ fast and the tenperuture distributionrelai,/el\
unifotm in the atnesthetic box. The purpose of control i't araestheting iSer shrimp is nointatfiing the tempetatureto go
down along theprofk
\rhich
have k6own basedon
the qstem
abo')e- Thetemperature reduction stuns at room temperature,
abofi
26 "- 28 "C, utxil the optimum tenlpenturefor
annestheting. The time of red ctiotlis
conlrolledin
60 minutes.Wen the temperaiure reachis
critical one, the cantral actiafi
is to nnintain
this conditionin
]0
minutesin
ordetto
ensure thatshrimp hd.s aheadJ a@estheted. The
peianwnce
oJ thecoftrol
using fu74r logic hasprawd
that v,ecan reach stabilitJ
i
the eftot in the levelneeded-K\,v,ards: Fuz4 logic, errar, error di|ference, set
point,
anaestheting baxI.
PENDAHIJLUANPembiusan merupatan perlakuan yang penting unnrk menyiapkan transportasi udaDg windu
(Penaeus onodan Fab) dengan sistem kering, maka untuk mendapatkan hasjl yang makimal, perlu
dilakukan pengafuran terhadap proses pembiusan tersebut. Salah
salu cara untuk
melakukan pengaturan yaitu dengan menggxnakan kontrol otomatis.Pada metode pembiusan dengan pendinghan befiahap, suhu
air
diturunkan perlahan-lahandari suhu ruangan sekitar 26
-
28 "C hingga suh\t 15 " C. Setpoint
adalah nilai yang harus dicapai olehsistem dengan adanya pengontrolan. Karena pembiusan udang dilakukan
dengan
pendinginan bertahap, maka .ret point harus berubah menurut waktu. Dengan kata l^inretpoint
adalah merupakanfungsi
waku.
Fungsi tersebut akan mencapai suhu 15 " C jika waktu pengont.olan menunjukkan menil ke 60. Kemudian setpoint
akan d\perlahankan pada nilaitersebut-Fungsi,retpoint diperoleh dari p€nelitian pendahuluan. Ekperimen yang dilakukan terhadap
air
dalambak
anesthesis menunjukkanuntuk tinggi
aL
tertentu terdapat beberapaprofil
kuraapenurunan
suhu
di
titik
yang
berbeda. Dengan mengacu kepadatitjk
yang mewakili,
maka disimpulkan bahwa kapasitas pendinginan mesin pendingin sesuai dengan profil penurunan suhu padaMahasiswa Jurusan Teknik Pcrlanian, Fakultas Tehologi Pertanian, IPB ' Saf Pengajar Jurusar Teknik Pertanian, Fakulias Tcknologi Pcrtanian, IPB
Seninar Nasio al Toknik PertaIiAn-AE2Oo0, Bogor
titik tersebut. Karena pengontrolan hanya dapat menurunkan kapasitas (tidak pernah
ak"
men'mh2h kapasitas), sifat sistem pengontiolan yang dirancang ditujukan untukmempft+alkal
performalrsi mesin pendingin pada kapasitas maksimumnya- Penelitianini
merupakalr simulasi yang dilakukan untuk menentukan karakteristiksitem
kontrol yaag akan dirancang, yaitu untuk meuentrkan nilai error. beda error, dan besamya pendinginan yarg harus diberikar pada sislemII.
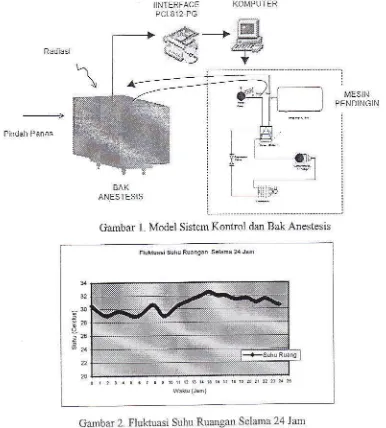
BAHAN DAN METODEMod€l
sistemkontiol
dan
bak
alestesis dapatdilihat
pada
ga$bar
I
Bak
tersebulnenggunakan bahan stainless steel dengan dimensi 0.5
x
i
x
0 5m
Dalam bak teffebut tcrdapat airseba!-ai media hidup udang dengan volume 0.065 m'?(tinggi air 13
cm)
Suhu arr dalam bak teaebutdipengaruhi oleh suhu ruangan, radiasi lampu dan refrigerasi yang diberikan uftuk air tersebut'
Suhu terukru pada ruangar mengikuti flukuasi sesuai dengan suhu luar seperti pada gambsr 2' Radiasi datang dari sinar
la
pu
neon 40 Watt yang ada di langit-langit ruangan Melalui perlitungan {lapat dikctahui mdiasiI'arg
sampai ke balt anestesis sebesar 5Watl
Refrigerasi diberikan untuk-"nu*nkun
suhu air rc;sebut sehingga nencapai I50 C dinana udang benar_benar dalanr kcadean pingsan .'-t
t r
i
,i
[image:2.595.127.513.275.703.2]ILNTERFACE
Gambar
L
Model Sistem Konhol dan Bak An€stesisw,ku(r3f,)
Vol2-i1
Keseimbangan energi dalam modei
bak
anestesis dapat ditunjukkanmelalui
hubunganmatematis, drrnana digunalan asurnsi bahwa
bat
zdalah satu sistem daIr suhu bahan (udang) aka"roma dengrr suhu arr' Persamaan rersebut adalai nt,C
"
ff:
nv Ct
"(r.,'
-
T,)
+ q,"o-
s,.t
- UA(T"
r*,)
(l)
Error
Ilcda Enor
dimana :
"
:
massatotal sistemyait!
massa air dan massa udang (kg)nt'
= aliran massa air pendingin (kg/jan)Cp,
= kalor spesifik sisteln, diarnbil nilai }'ang paling berpengaruh yaitu udang (kJ/kg C)1,
= suhu air dalam bak anestesis ("C)7"",
= suhu m:.ngan ("C)4;
= radiasi )'ang ada di ruangan 0vatt)4,E
= relrigeresi dari alal pendingin ovatl)Pada peDgontrola[
Or
Orf meDggunakan thennostat, aldivitas pendinginan dihcnrrkan ijkasLrhu atcual beiada di bawah set poinr dan akan dijalankan lagi iika suhu
akuai
berada diatas sei poinr.Narnun {:lengan pengonlrolan tersebut set poinl harya menliliki
nilai ya[g
tetap menrinjr\\aklu
dan kurang peka lcrhadap pcrubahan kondisi lingkungan )'angkecil
Der€an penggunaanRczy
I'ctgittirrtrol,
pengakrilan alat pendiDgin direntukar dad nilai error (E) da:r beda error (dE)' Error adalslrpenvinrpangan nilai akua] dari nilai set point, sedangkan beda crror adalah selisih
eror
pada t dcrgaicrror pada !-Llt. Secera matenatis dilltlis :
dE(t)
(2)
(3)
AI
Fungsi keaoggotaan error
dal
bedaelror
dan oulputdi
definisikan sesuai dengan sistefll ko.rttol. Dalam peneiitraaini
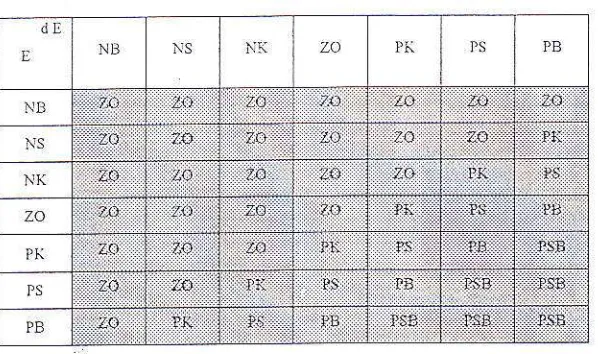
ketiga fungsi keanggotaan tenebul ditunjukkan pada Gambar 3 dar 4' l'ada simulasi pengontolan, elror dibedkan skala 0 25:
1 67'C sedangkan beala error diberikan skala 0.25 : 0.75'C. Pengambilan keputusan yang dilalarkan berdasarkan elror dan beda error dapat dilihatpada Tabel
L
E(t)
=7",(1')
r"t(!)
dE(t) _
E(1)
E(t
At)
'dtAl
dt
dE(t)
(1-""(a
-
T"pQ\-
(r",(t
-
Lt')-T.p(/
Lt))
At
Q".(t)
-r*(
-
N))
-
Q",(t)
-
r",
^n
dt
G:mbar 3.
Furgsi
Keanggolaan Elror dan BedaElror
4
t
'i
)
trSeminer Nasio at Tekrik Pert nial-AE2000. Bogor
[image:4.595.194.420.78.191.2]0.ls
Gambar 4 lungsi Kangeotatur Keludatr
Tabel 1. Matr ik Kcputusar
I
.HASIL
DAN PEMBAI{ASANFlulduasi suhu udara pada saal belum dilakukan pengontrolan ditunjukkan pada Cambar 2. Pul_ul 14.52 menunjukkan suhu paling panas sepanjang hari
laitu
sebesar 32.5'C sedalgkan suhu terdingin berada padapukul
5.30Fitu
sebesar28.9'C
Suhuluar
mempunyai pengaruh l'a.ng signiflkan terhadap suhu air di bak pemingsan. Karena itu pengakil:n sistem kontrol pada saat suhu ruangan tjnggi ak .n menyebabkan pedormaNi sistem kontrol akan menunrn pulaSimulasi pengontolan dilakukan pada pukul 10.00 dimana suhu awal air diasunuikan sebesar
28'C.
Daya pendinginan yang digunatan adalai sebesar 2800Watt
Nilai
ini
adalah asumsi yangdiambil dari kapasitas
sebuah
esin pendingin sebesar 2 hp. Dengan mempertinba.ngkan keburuhandala untuk mendinginkan ajr hingga mencapai .rel Poi,?/, maka digunakan dua bua! mesin pendingin
vang masirg-masing mempunyai daya 1400
Watt.
Pengontrolan terhadap pendinginan dilatu!'an secanon-of.
Namun keputusan sistem kontrol untuk menghidupkan dan mematikaa pendinginandilakukan melalui inlerensia dengan
logikafz4r.
Performansisiste
kontrol pada pengontroiantzz} dapat dilihat scperti pada Cambar 5. [image:4.595.171.470.253.430.2]Gambar5'suhuAirdalamBakAnesthesisPadaPengontrolan,ra}MulaidariAwalPengontrolan
Grafik
diatas
enunjukkan bahwa sebelum penSontrolandimulai'
suhuair
berflulluasi.""git
ii-.tft
.Ju.^
Iuar. Padapukul
10 00 ketika pengontrolan dimulai' perlahan Iahan suhu airi"i"iri-lrf. ^t.u".i.
menurun hingga mencapaisuh't
152
"C
padapuklil
1100
Dari
a\r'aliirielntrotan
fringga suhu tersebLrt. lima waktu yang diperlukan untuk menurunkan suhu adalah 1 iam 'n:iro].ut,uai'
sel;4r.r24j.m
drlat
drlinal pada Crnrbar 6Ganbar
6
SuhuAir
dalam Bak Aresdesis daiam 24 JamDari kedua grafik diatas dapat dilihat bahwa suhu air dalam bak mempunyai kecenderungan menunrn vans sana dengan
sq
paiinr' Stthuair
pada akhir pensontrolaJroam
tl00r
menunjukkan"'i"ilJ*'r,
isloi"
c.'s.cangti"n
nitui ser pofur' padajam ini adalah sebesarl5
oc
Beralri rerdapdt""""i-"^."""
,""-,
sebesard.2i
"C.
Sisiem kontrol pada saa( lewaljarn I1
00 tidak bekerjalagi
ffi; lil; ;;;
penaingin tetap dihidupkao pada davamakimunnva
yaiflr
1400watt'
Dengan periakuan mesin pindingin yang selalu
akif
tersibut dapat dilihat bahwa suhu air akan berada""ii"iii'
*tit.
14"Cda;
15"c. P;da jam 24.00 mesin pendingh te$ebut diinatikan'** *;";;tk;ro.
i iiirr^
trt
poiit
yang digunakan untuk sistem bak anestesis sesuai dengank.ukt";;i';;'t;;lingin
yang 'beterja-pad1 kalasitas makimumnva tanpa pengontrolan' Apabilapral'-".i.
p""ai.gi.
,e..-"uritai6erlt^n'pi"gontrolan.
maka yang bisa dilakukan adalah penurunan iapasitas pendinginannya Dengan menggunikan sahi buah mesinpendingu
pedormansi sislemi"iir"r
tait
,lpiJi
v"ig
aiiraraitan.raiJna
itu untuk keperluan pengontrolan diperluan penambahanirpJ",
-"ri.ip"nd;tgin
atau menanbairjuniah
mesinpendingil
Pensontrolan dilakukan terhadapkedua mesin
---
- pendingin.Fl-6rft"n
Jn"rgl yang tedadi selana pengonrolan dengan dua mesin pendingin dapat dilihatp"d"
c"-;;;;r.
l't.nu"*i
gtint
ini,
nilai reirigirasi
sebelum pengontrolan bemilainol
Denganirf",.*i^l"aaf
ai"nakan
lama penyalaan mesin-pendingin pada saat setelah,sampling (akuisisi datake komouLelr. Jika Dada s"at Iru lama penlalaar )ang drdapar
lebil
be'iar darlnol
lnak" alal Dadai""ar""
|jr'
a"t"
tirJ-".;-
l.amun jit<a lama'pen1al";n drperoleh sdma dengannol
maka aLr akan berada pada keadaan Orf.Cambar 8. Keputusan l-ama Penyalaan Mesin Pendingin Seliap Kali Sampli4
Pada Gambar
6.
dapat diketahui berapa lzma dan kapan mesiD pendingin harus nyala. Darigambar tersebut juga dikeiahui bahwa mesin pendingin harus dimatikan pada
jam
10.00, 10.37, 10-45, 10.52 dan padajam
11.00. Keputusan untuk menyalakan alau nematikan mesin pendinginini
akanterus diperbarui setiap
kali
dilakukan pengambilan datadari
sensor. Jika padajam
10.33 diberi kepulusan bahwa mesin pendingin harus nyala selama2.5
menit, maka padajam
10.37 mesin pendingin harus mati hingga keputusan pada sampling berikutnya diberikanSeminar Nasional 'l'eknik Per!.arnan AE2000, Bogor
Ganbar 7. Flukuasi Daya Pendingilun pada PengontrolanrAllr dengan Aksj
Ko
trol,r-Olf
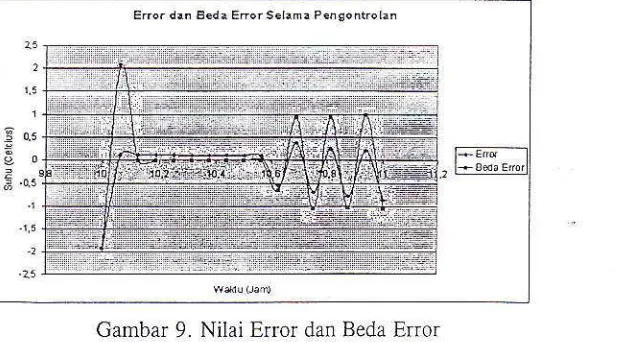
9q:
Nilai error pada n)enunjukkan
profil
yang [image:6.595.181.498.535.706.2]Voi.2
i8
Gambar 9. Nilai Error dan Beda Error awal pengo,rlrolan cukulr linggi yaitu sebesar
menurun tajarn, error berada pada nilai yang
1.9,1. Kcrika
knt\a
set point stabil yaitu sekilar0.I
hinggaa R.rrire.an s6lanr P.n gohtolrn
a
EnF
iaatSeminar
^
1r sF.trnekan ketrka kuwa setpoi
menunjukkanprofil
yanS menurun landai (mulaijafi
10 37).!,ii
ii#'i".nriJ"*,
ai."tit".'-r
dan 0.5. 3ecara grafis, nitai beda error menunjukkan keseslaian1::
#;;;;il;;"J
rur',"
,erp,inr
aengan penurunan subu sebenamva Affara jam 10 7 hingsalilj
fl:',";,;;
t.diJrot
"J"ii..u"r".
"0.
Iierarti laju
penumnan suhuair
sesuai dengan lajulT
,::;;;
;;;";;;iJr'
s.p.rti
paa^.no''
beda error juga mempunvai niiai vang flulduatif setelahLl'ir
-'
"'
,r,
"'D;;i
,r,rr'-.""il"kkan
profil yang landai' Nilai ini berada pada kisaran -1 dan l;;il;an
diatas dapat d-iketahui karakeristik sistem kontrol dan mesin pendingin yang.aipr,i1tiL"i'"lr"r,
faa
error, dan daya pendinginan yang harus diberikan Dengan demikian simulasil",u[J"*in
tonuof
,ni sangat diperlukan sebelttm melak'kan serizg eksperimen dengan lardw'?/e 'IV.
KESIMPIJLAN
Pensontrolan (lerm.rsuk J4la1' hanya bisa
mengll"ngi
kapa\jra'alal
lidak
2kan mena'nbal'kr"rri"r;i;; i;;
i,,
,"*r
"r.ia"prlr"
performdn.i
.r.rem konrro, yang maksimal diperlukanal;t dengan kaPasiras Yang besar'
''" "' 'iii"iiJ"i
.itigirasi
pada"imulasi setara dengan 2 buah mesin
pendingin yaitn sebesar 2800
wrtt.
unrui
mendapatkil hasil yangoptimal
AhenEtif yang bisa ditat"ukan adalah mengguakan rnesiir"''"-'^
pendingin dengan kapasilas yang lebih besar''suk ;n"rt..ii
aeng;n volume air yang berbeda akan memberikan perbedaan pada penurunan.ut,uni,",
t^r"n"
itufungsi.tetPol,t
merupakan fungsi spesifik yang tergantung pada besamya beban pendirlginin.V,
DAFTAR PUSTAKARoss, Timothy
J.
lggl
F
zq
Logic with Engineeing APPticaion Mc GrawHill'lnc
Singapore Saptomo,SK.
1995-Pensatura
Suhu dengan PengonlrolFuuy
skripsi
Jurusan TeknikPertanian-lnstitul Pertanian Bogor'
Subarkah, Danden. TggS Pe gaturan Suhu den|an
I'ogikt
Fuzqt unfirkfylsp.?xati
Udag
windu'""'"'-ii;;;;
^;r"don
t'ib1
Hiaup Srsten"Kenzg
stripsi
JurusanTeknik
Pertanian lnstitutPertanian Bogor'