LAPORAN KERJA PRAKTEK
PERANCANGAN DAN PEMBUATAN ROBOT KRI 2010
STIKOM SURABAYA
Oleh :
M.Fahmi Ibnu M. (08.41020.0074) Chokoh Sety Utomo (08.41020.0068)
SEKOLAH TINGGI
MANAJEMEN INFORMATIKA & TEKNIK KOMPUTER
SURABAYA
2011
STIKOM
ABSTRAKSI
Kontes Robot Indonesia merupakan agenda tahunan yang diadakan oleh
Dirjen Pendidikan Nasional Indonesia. Di mana STIKOM Surabaya melalui
jurusan S1-Sistem Komputer mengirimkan wakil terbaiknya untuk mnegikuti
perlombaan ini.
Setiap tahun tema perlombaan berubah-ubah yang disamakan dengan
kontes tingkat internasional (ABU Robocon) yang pada tahun 2010 diadakan di
Mesir yang bertemakan ”ABU Robocon Egypt”. Di mana ada tiga robot yang
bekerja sesuai dengan tugasnya masing-masing yang sudah ditentukan dalam
peraturan pertandingan.
Dalam kerja praktek ini membahas perancangan robot otomatis Mankara.
Robot ini dikendalikan secara otomatis dengan sebuah chip mikrokontroler sebagai otaknya. Di mana dalam pembuatannya diperlukan pembuatan mekanik,
elektro, dan program untuk dapat mengendalikan robot secara otomatis.
Dalam pertandingan banyak terjadi trouble shoting yang mengakibatkan performa robot kurang sempurna, diantaranya adalah sistem kontrol robot yang
kurang sempurna dan kurang sempurnanya pembuatan mekanik robot.
STIKOM
DAFTAR ISI
Halaman
ABSTRAKSI..………...i
KATA PENGANTAR…..….………...ii
DAFTAR ISI.………...iv
DAFTAR GAMBAR………....vii
DAFTAR TABEL…..…...………....ix
BAB I PENDAHULUAN 1..1 Latar Belakang Masalah...1
1..2 Perumusan Masalah... ...2
1..3 Batasan Masalah... ...2
1..4 Tujuan... ... ...2
1..5 Kontribusi... ...3
1..6 Sistematika Penulisan... ...3
BAB II GAMBARAN UMUM STIKOM SURABAYA 2.1 Sejarah dan Perkembangan... ...5
STIKOM
2.2 Jenis Usaha... ... ...10
2.3 Lokasi... ...11
2.4 Visi, Misi dan Komitmen STIKOM Surabaya... ...11
2.4.1 Visi STIKOM Surabaya...11
2.4.2 Misi STIKOM Surabaya... ...11
2.4.3 Komitmen STIKOM Surabaya... ...13
2.5 Struktur Organisasi STIKOM Surabaya... ...13
2.6 Departement... ...14
2.7 Filosofi... ...15
BAB III TEORI PENUNJANG 3.1 Mikrokontroler ATMega16... ...17
3.1.1 Port SebagaiInput/Output Digital... ...20
3.1.2 Timer... ...22
3.1.2.1 Gambaran Umum... ...22
3.1.2.2 Timing DiagramTimer/Counter...23
3.2 Relay....24
3.2.1 Prinsip Kerja Relay...24
3.3 Driver H-Bridge... ...25
3.4 Motor DC... ...26
3.5 Rotary Encoder... ...28
3.6 Sensor Cahaya...28
3.6.1 Photodiode...29
STIKOM
3.6.2 Komparator... ...29
3.7 Limit Switch... ...29
3.8 Rangkaian Reset... ...30
BAB IV METODE KERJA PRAKTEK 4.1 Pembuatan Minimum Sistem... ...32
4.2 CVAVRProgrammer... ...45
BAB V HASIL DAN PEMBAHASAN 5.1 Hasil PercobaanRunning Test I Regional IV...54
5.2 Hasil PercobaanRunning TestII Regional IV...55
5.3 Hasil PercobaanRunning TestIII Regional IV.... ...56
5.4 Hasil Percobaan Babak Penyisihan Regional IV...56
5.5 Hasil Percobaan Babak 16 Besar Regional IV...57
5.6 Hasil Percobaan Babak 8 Besar Regional IV...57
5.7 Hasil Percobaan Babak Semifinal Regional IV...58
5.8 Hasil Percobaan Babak Final Regional IV...58
5.9 Hasil PercobaanRunning Test I Nasional...59
5.10 Hasil PercobaanRunning TestII Nasional...59
5.11 Hasil PercobaanRunning TestIII Nasional...60
5.12 Hasil Percobaan Babak Penyisihan Nasional...60
5.13 Hasil Percobaan Babak 16 Besar Nasional...61
5.14 Prestasi Tim Robot KRI...61
STIKOM
BAB VI PENUTUP, KESIMPULAN DAN SARAN
6.1 Kesimpulan... ...62 6.2 Saran... ...62 DAFTAR PUSTAKA………...64
STIKOM
BAB I PENDAHULUAN
Pada bab satu penulis menjelaskan latar belakang mengapa penulis membuat robot KRI, menjelaskan perumusan dan batasan masalah yang ada pada kerja praktek dan menjelaskan tujuan dari kerja praktek.
1.1 Latar Belakang Masalah
Kontes Robot Indonesia merupakan agenda tahunan yang diadakan oleh Dirjen Pendidikan Nasional Indonesia. Setiap perguruan tinggi yang bergerak di bidang informatika di seluruh Indonesia mengirimkan mahasiswa terbaiknya untuk mengikuti perlombaan tersebut. Begitu juga STIKOM Surabaya melalui jurusan S1-Sistem Komputer juga mengirimkan wakil terbaiknya untuk mengikuti perlombaan ini.
Setiap tahun tema perlombaan berubah-ubah yang disamakan dengan kontes tingkat internasional (ABU Robocon) yang biasanya mengikuti budaya tuan rumah penyelenggara yang pada tahun 2010, tuan rumah adalah Mesir. Tema ABU Robocon 2010 adalah ”ABU Robocon Egypt” sedangkan Kontes Robot Indonesia 2010 adalah “Membangun Candi Prambanan” di mana terdapat satu robot manual dan tiga robot otomatis yaitu dua robot Khafraa dan satu robot Mankara. Setiap robot bekerja sesuai dengan tugasnya masing-masing yang sudah ditentukan dalam peraturan pertandingan. Dalam peraturan pertandingan robot otomatis Mankara hanya diperbolehkan me-reload satu balok dan robot otomatis
STIKOM
Khafraa dapat me-reload balok sebanyak-banyaknya. Dalam laporan ini akan membahas robot otomatis Mankara. Tugas robot otomatis Mankara yaitu membangunpyramid terakhir yang terdiri dari dua susunan yaitu susunanpyramid atas danbase.
Untuk menjalankan tugas robot secara otomatis dibutuhkan perancangan-perancangan mekanik dan sistem kontrol yang baik. Dalam perjalanan pembuatan robot juga diadakan beberapa research yang bertujuan menyempurnakan kinerja robot terutama robot Mankara.
1.2 Perumusan Masalah
Dalam perumusan masalah yang ada pada kerja praktek yang dilakukan oleh penulis terdapat beberapa masalah yang harus diselesaikan. Adapun masalah yang harus diselesaikan dan dibahas adalah sebagai berikut :
1. Bagaimana desain mekanik robot? 2. Bagaimana desain sistem kontrol?
1.3 Batasan Masalah
Adapun batasan masalah yang perlu diperhatikan yaitu :
1. Desain robot disesuaikan dengan tema “Kontes Robot Indonesia” 2010
1.4 Tujuan
STIKOM
Tujuan dari kerja praktek ini adalah memberikan pengalaman kerja terhadap mahasiswa. Dengan adanya kerja praktek diharapkan mahasiswa lebih siap menghadapi tantangan di dunia kerja.
1.5 Kontribusi
Adapun kontribusi dari kerja praktek ini terhadap instansi STIKOM Surabaya dengan membawa nama baik STIKOM Surabaya dalam Kontes Robot Indonesia 2010 yang diadakan di Malang, Jawa Timur.
1.6 Sistematika Penulisan
Penulisan laporan disusun dengan sistematika sebagai berikut :
BAB I PENDAHULUAN
Bab ini membahas tentang uraian mengenai latar belakang masalah, perumusan masalah, pembatasan masalah, tujuan, kontribusi, serta sistematika penulisan dalam penyusunan laporan kerja praktek.
BAB II GAMBARAN UMUM STIKOM SURABAYA
Bab ini berisi sejarah dan perkembangan, lokasi, jenis usaha, visi, misi, struktur organisasi, departemen, dan komitmen STIKOM Surabaya sebagai tempat kerja praktek.
BAB III LANDASAN TEORI
STIKOM
Bab ini membahas tentang toeri penunjang yang digunakan sebagai acuan dalam kerja praktek tersebut.
BAB IV METODE KERJA PRAKTEK
Bab ini membahas tentang jenis metode yang digunakan dalam pelaksanaan kerja praktek sampai pada tahap penyusunan laporan.
BAB V HASIL DAN PEMBAHASAN
Bab ini membahas tentang proses pembuatan program serta menampilkan foto-foto hasil robot yang telah dikerjakan.
BAB VI PENUTUP
Bab ini merupakan bagian akhir dari laporan kerja praktek yang membahas tentang kesimpulan dari keseluruhan hasil dari kerja praktek serta saran disesuaikan dengan hasil dan pembahasan pada bab-bab yang sebelumnya.
STIKOM
BAB II
GAMBARAN UMUM STIKOM SURABAYA
2.1 Sejarah dan perkembangan
Di tengah kesibukan derap pembangunan nasional, kedudukan informasi semakin penting. Hasil suatu pembangunan sangat ditentukan oleh materi informasi yang dimiliki oleh suatu negara. Kemajuan yang dicitakan oleh suatu pembangunan akan lebih mudah dicapai dengan kelengkapan informasi. Cepat atau lambatnya laju pembangunan ditentukan pula oleh kecepatan memperoleh informasi dan kecepatan menginformasikan kembali kepada yang berwenang.
Kemajuan teknologi telah memberikan jawaban akan kebutuhan informasi, komputer yang semakin canggih memungkinkan untuk memperoleh informasi secara cepat, tepat, dan akurat.
Hasil informasi canggih ini telah mulai menyentuh kehidupan kita. Penggunaan dan pemanfaatan komputer secara optimal dapat memacu laju pembangunan. Kesadaran tentang hal inilah yang menuntut pengadaan tenaga-tenaga ahli yang terampil untuk mengelola informasi, dan pendidikan adalah salah satu cara yang harus ditempuh untuk memenuhi kebutuhan tenaga tersebut.
Atas dasar pemikiran inilah, maka untuk pertama kalinya di wilayah Jawa Timur dibuka Pendidikan Tinggi Komputer, Akademi Komputer & Informatika Surabaya (AKIS) pada tanggal 30 April 1983 oleh Yayasan Putra Bhakti
STIKOM
berdasarkan SK Yayasan Putra Bhakti No. 01/KPT/PB/III/1983. Tokoh pendirinya pada saat itu adalah :
1. Laksda. TNI (Purn) Mardiono 2. Ir. Andrian A. T
3. Ir. Handoko Anindyo 4. Dra. Suzana Surojo 5. Dra. Rosy Merianti, Ak
Kemudian berdasarkan rapat BKLPTS tanggal 2-3 Maret 1984 kepanjangan AKIS dirubah menjadi Akademi Manajemen Informatika & Komputer Surabaya yang bertempat di jalan Ketintang Baru XIV/2. Tanggal 10 Maret 1984 memperoleh Ijin Operasional penyelenggaraan program Diploma III Manajemen Informatika dengan surat keputusan nomor: 061/Q/1984 dari Direktorat Jendral Pendidikan Tinggi (Dikti) melalui Koordinator Kopertis Wilayah VII. Kemudian pada tanggal 19 Juni 1984 AKIS memperoleh status TERDAFTAR berdasar surat keputusan Direktorat Jendral Pendidikan Tinggi (Dikti) nomor: 0274/O/1984 dan kepanjangan AKIS berubah lagi menjadi Akademi Manajemen Informatika & Teknik Komputer Surabaya. Berdasar SK Dirjen DIKTI nomor: 45/DIKTI/KEP/1992, status DIII Manajemen Informatika dapat ditingkatkan menjadi DIAKUI.
Waktu berlalu terus, kebutuhan akan informasi juga terus meningkat. Untuk menjawab kebutuhan tersebut AKIS ditingkatkan menjadi Sekolah Tinggi dengan membuka program studi Strata 1 dan Diploma III jurusan Manajemen Informatika. Dan pada tanggal 20 Maret 1986 nama AKIS berubah menjadi
STIKOM
STIKOM SURABAYA , singkatan dari Sekolah Tinggi Manajemen Informatika & Teknik Komputer Surabaya berdasarkan SK Yayasan Putra Bhakti nomor: 07/KPT/PB/03/86 yang selanjutnya memperoleh STATUS TERDAFTAR pada tanggal 25 Nopember 1986 berdasarkan Keputusan Mendikbud nomor: 0824/O/1986 dengan menyelenggarakan pendidikan S1 dan D III Manajemen Informatika. Di samping itu STIKOM SURABAYA juga melakukan pembangunan gedung Kampus baru di jalan Kutisari 66 yang saat ini menjadi Kampus II STIKOM SURABAYA . Peresmian gedung tersebut dilakukan pada tanggal 11 Desember 1987 oleh Bapak Wahono Gubernur Jawa Timur pada saat itu. Secara berturutan perkembangan dapat dijelaskan sebagai berikut :
19 Juni 1984 AKIS membuka program DIII dengan status TERDAFTAR. 30 Maret 1986 AKIS ditingkatkan menjadi Sekolah Tinggi Manajemen
Informatika & Teknik Komputer Surabaya (STIKOM SURABAYA ) 25 Nopember 1986 STIKOM SURABAYA mendapatkan status
TERDAFTAR untuk program S1 dan DIII Manajemen Informatika. 11 Desember 1987 Peresmian Gedung STIKOM SURABAYA Jl. Kutisari
66 Surabaya oleh Bapak Wahono Gubenur Jawa Timur saat itu. Membuka bidang studi DI Program Studi Komputer Akuntansi.
1990 Membuka bidang studi DI Program Studi Komputer Keuangan / Perbankan
1 Januari 1992 Membuka Program S1 jurusan Teknik Komputer dengan status TERDAFTAR
19 Maret 1992 DIII Manajemen Informatika memperoleh status DIAKUI.
STIKOM
21 Januari 1993 Program S1 Manajemen Informatika memperoleh status DIAKUI.
1 November 1994 Membuka program DI program studi Komputer Grafik Multimedia
31 Januari 1995 STIKOM SURABAYA memperoleh kenaikan status DISAMAKAN untuk Program S1 dan DIII Manajemen Informatika
28 Oktober 1997 Pemancangan tiang pertama gedung baru STIKOM SURABAYA Cybercampus di Jl. Raya Kedungbaruk Surabaya.
12 Mei 1998 STIKOM SURABAYA membuka tiga program pendidikan baru sekaligus, yaitu :
DIII bidang studi Sekretari Berbasis Komputer DII bidang studi Komputer Grafik Multimedia DI bidang studi Jaringan Komputer
30 Juni 1998 STIKOM SURABAYA menerima Status DISAMAKAN untuk :
Program DII bidang studi Grafik Multimedia
Program DI semua bidang studi ( Komputer Akuntansi, Jaringan Komputer, Komputer Grafik Multimedia).
Desember 1998 Memperoleh status TERAKREDITASI dari Badan Akreditasi Nasional, untuk Program Pendidikan S1 Jurusan Manajemen Informatika.
Maret 1999 Perpindahan ke Kampus baru, Jl. Raya Kedung Baruk 98, dari Kampus STIKOM SURABAYA SIER Jl. Rungkut Industri I / 1 Surabaya.
STIKOM
Juni 1999 Pemisahan program studi DI Grafik Multimedia menjadi
program studi.
DI Grafik dan program studi DI Multimedia, serta perubahan program studi DII Grafik Multimedia menjadi program studi DII Multimedia. Agustus 2000 Memperoleh status TERAKREDITASI dari Badan
Akreditasi Nasional, untuk Program Pendidikan S1 Jurusan Teknik Komputer.
Mei 2002 Memperoleh status TERAKREDITASI dari Badan Akreditasi Nasional, untuk Program Pendidikan DIII Jurusan Manajemen Informatika.
Juli 2003 Membuka bidang studi DIII Program Studi Komputer Percetakan & Kemasan.
13 Agustus 2003 Program Studi Strata 1 Teknik Komputer berubah nama menjadi Program Studi Strata 1 Sistem Komputer berdasar surat dari Dikti tentang Perpanjangan Ijin Penyelenggaraan nomor: 1904/D/T/2003. 2 September 2003 Membuka bidang studi DIII Program Studi Komputer
Percetakan & Kemasan.
4 Juni 2004 STIKOM SURABAYA memperoleh status “TERAKREDITASI (B)” untuk Jurnal Ilmiah GEMATIKA (Jurnal Manajemen Informatika) dan “TERAKREDITASI (C)” untuk Jurnal Ilmiah GEMATEK (Jurnal Teknik Komputer).
STIKOM
3 Maret 2005 Program Studi Diploma III Komputer Akuntansi memperoleh ijin perpanjangan berdasar surat dari Dikti tentang Ijin Penyelenggaraan nomor: 644/D/T/2005.
10 Mei 2005 Program Studi DIII Komputer Multimedia memperoleh Perpanjangan Ijin Penyelenggaraan berdasar surat dari Dikti nomor: 1402/D/T/2005.
3 Juni 2005 Program Studi Strata 1 Sistem Informasi memperoleh status
“TERAKREDITASI” (SK BAN-PT nomor:
012/BAN-PT/Ak-IX/S1/VII/2005 dengan nilai 333 (B)).
27 Desember 2005 Program Studi Strata 1 Sistem Komputer memperoleh status “TERAKREDITASI” (SK BAN-PT nomor: 024/BAN-PT/Ak-IX/S1/XII/2005 dengan nilai 330 (B)).
16 Januari 2006 Program Studi Diploma III Komputer Sekretari & Perkantoran Modern berubah nama menjadi Program Diploma III Komputerisasi Perkantoran dan Kesekretariatan berdasar surat dari Dikti tentang Ijin Penyelenggaraan nomor: 75/D/T/2006.
2.2 Jenis Usaha
Adapun kegiatan usaha STIKOM Surabaya adalah menyelenggarakan jasa pendidikan Perguruan Tinggi. Dalam operasional STIKOM Surabaya dibagi menjadi beberapa dapartemen, dimana dari masing-masing departemen akan bertanggungjawab terhad spesifikasi pekerjaan tertemtu. Departmen tersebut meliputi :
STIKOM
• PSDM (Pengembangan Sumber Daya Manusia) • BAAK (Bagian Administrasi dan Akademik) • AU (Administrasi Umum)
• Prodi (Program Studi) • PA (Penelitian Akademik) • PM (Pengabdian Masyarakat) • Labkom (Laboratorium Komputer)
• PPTI (Pengembangan dan Penerapan Teknologi Informasi) • Perpustakaan
• Kemahasiswaan • Research Center • Kendali Mutu
2.3 Lokasi
Lokasi kerja praktek diselenggarakan di Laboratorium (Lab.) MicrokontrollerSekolah Tinggi Manajemen dan Teknik Komputer Surabaya yang terletak di Jl. Raya Kedung Baruk 98 Surabaya lantai 8.
2.4 Visi, Misi dan Komitmen STIKOM Surabaya 2.4.1 Visi STIKOM Surabaya
Tercapainya kepeloporan karena keunggulan manusia pada peringkat benchmark yang pada tahun 2018 mendekati keunggulan sumber daya manusia Singapura dalam upaya mendukung keunggulan studi dalam arti luas tentang
STIKOM
Teknologi Informasi (TI) untuk menjamin kesejahteraan manusia yang pluralism danmultikulturalisme.
2.4.2 Misi STIKOM Surabaya
1. Meningkatkan strata pendidikan secara terus-menerus untuk semua lapisan pada bauran kompetensi: bukan hanya pada kognisi dan pada psikomotor keahlian, tapi terutama pada kompetensi sikap mental untuk semua manusianya yang ada di STIKOM Surabaya agar semakin produktif dan inspiratif, dengan hidup hanya melayani dan melayani.
2. Mengembangkan corporate governance yang sehat dan produktif secara sistematik tapi bersifat emerging, demi terciptanya habitat organisasi yang socio-cultural economic sekaligus inovatif.
3. Melakukan integrasi mulai dari perolehan intake mahasiswa walaupun pada standar biasa, tetapi akan selalu dijaga dan diproses tidak hanya pada tingkat maksimum tetapi terutama optimum, sampai dengan suatu hasiloutcome yang luar biasa pada hardskill dan terutama padasoftskill-nya, demi perkembangan masyarakat, negara dan bangsa.
4. Meningkatkan produktivitas dengan mengoptimalisasi pengelolaan sumber daya, terutama sekali sumber daya manusianya dan sumber daya keuangan berdasarkan pada kegiatan yang relevan dan sesuai dengan harkat manusia. 5. Meningkatkan kesejahteraan untuk semua manusianya berdasarkan
keseimbangan pada keadilan dan prestasi kontribusi organisasional setiap anggota organisasi di STIKOM Surabaya ini secara merata dan menyeluruh.
STIKOM
6. Melakukan perluasan pengabdian masyarakat, berbasis pada pengembangan ilmu dan teknologi yang dikuasai, untuk peningkatan kesejahteraan semua manusia, khususnya dengan peduli pada kaum miskin.
7. Melakukan peningkatan dan penajaman serta perluasan semangat penelitian, bukan demi ilmu dan teknologi itu sendiri, tapi untuk menguak kebenaran realitas kehidupan agar kehidupan manusianya lebih manusiawi dan manusianya berguna bagi seluruh umat manusia.
8. Berjejaring secara proaktif dan sehat dengan stakeholders untuk konsolidasi dan adaptasi organisasi dalam rangka perkembangan dan pertumbuhan organisasi.
2.4.3 Komitmen STIKOM Surabaya
Dengan saling bergandengan tangan baik ke dalam maupun ke luar, semoga visi dan misi ini tidak hanya dipahami, tetapi juga dihayati dan lebih daripada itu dilaksanakan secara konsisten dan semakin meningkat oleh setiap individu yang berada di STIKOM Surabaya untuk menghidupi (bukan mencari kehidupan dari) STIKOM Surabaya yang kita banggakan dan akan terus kita cintai dengan semangat hanya melayani dan melayani.
2.5 Struktur Organisasi STIKOM Surabaya Ketua Sementara : Ir. Andrian A. T
Wakil Ketua I (Bidang Akademik) : Pantjawati Sudarmaningtyas, S.Kom., OCA Wakil Ketua II (Bidang Sumber Daya) : Lilis Binawati, S.E., M.Ak
Wakil Ketua III (Bidang Kemahasiswaan & Alumni) : Drs. Bambang Hariadi, M.Pd
STIKOM
Sekretaris : Sisca Novaria Fitri, A.Md.
Kaprodi S1-SK : Yuwono Marta Dinata, S.T., M.Eng.
Kaprodi S1-DKV & DIV-MM : Abdul Aziz, S.Sn., M.Med.Kom Kaprodi DIII-MI & DIII-KPK : Titik Lusiani, M.Kom, OCA Kaprodi DIII-KGC : Ir. Hardman Budiardjo, M.Med.Kom., MOS Kabag AAK : Vivine Nurcahyawati, S.Kom., OCA
Kabag LABKOM : Anjik Sukmaaji, S.Kom., M.Eng. Kabag PENMARU : Januar Wibowo, S.T., M.M Kabag AU : Hendro Poerbo P., S.T., OCA
Kabag KM : Ayuningtyas, S.Kom., M.MT., MOS Kabag HUMAS : Arifin Puji Widodo, S.E., M.SA Kabag SSI : Tan Amelia, S.Kom., MCP
Kabag PERPUS : Rudi Santoso, S.Sos.
Kabag PM : Susijanto Tri Rasmana, S.Kom., MT Kasie SCC : Sri Suhandiah, S.S., M.M.
Kasie Rumah Tangga : Marhonip, S.E.
Kasie Pengadaan : A. B. Tjandrarini, S.Si., M.Kom. Kasie Perbaikan & Peralatan : Heri Pratikno, S.T.
2.6 Departement
Dalam Operasionalnya STIKOM Surabaya dibagi menjadi beberapa departemen, di mana dari masing-masing departemen akan bertanggung jawab
STIKOM
terhadap spesifikasi pekerjaan tertentu. Dengan demikian diharapkan kinerja seluruh karyawan dapat optimal. Departemen tersebut meliputi :
1. Administrasi Akademik & Kemahasiswaan 2. Administrasi Umum
3. Laboratorium Komputer 4. Perpustakaan
5. Kemahasiswaan, Alumni Dan Bursa Kerja 6. Hubungan Masyarakat
7. Penerimaan Mahasiswa Baru
8. Pengembangan Sumber Daya Manusia
9. Pengembangan & Penerapan Teknologi Informasi 10. Solusi Sistem Informasi
11. Kendali Mutu 12. Sekretaris Lembaga 13. S1 Sistem Informasi 14. S1 Sistem Komputer
15. DIII Manajemen Informatika
16. Komputerisasi Perkantoran & Kesekretariatan 17. DIII Komputer Grafis Dan Cetak
18. DIII/DIV Multimedia 19. Keuangan
20. Business Development
21. Pengabdian Masyarakat
STIKOM
22. Penelitian Akademik 23. Hubungan Antar Instansi
24. Staff Khusus Program Smk/Umum
2.7 Filosofi
STIKOM Surabaya menganut falsafah bahwa pendidikan adalah hak setiap warga negara Indonesia, sehingga dalam menyelenggarakan pendidikan dan atau melaksanakan tugas-tugas yang lain, STIKOM Surabaya mengutamakan kemandirian/independence yaitu tidak membedakan golongan, suku, agama, ras dan tidak berpolitik, serta penuh dengan kesadaran berperan aktif dan peduli terhadap lingkungan.
Sekolah Tinggi Manajemen Informatika & Teknik Komputer adalah sebuah sekolah tinggi yang khusus sifatnya. Kehidupan umum maupun kehidupan ekonomi, khususnya kehidupan teknologi sangat besar mengandalkan diri pada informasi.
Informasi makin besar jumlahnya, baik karena kemajuan ilmu pengetahuan dan teknologi yang menghasilkan dalam jumlah besr pengetahuan dan informasi, maupun karena kebutuhan manusia akan informasi tentang berbagai hal begitu meningkat. Semua informasi yang jumlahnya luar biasa besar sekarang ini tidak akan dimanfaatkan manusia jika tidak diatur dalam suatu sistem atau cara yang sekarang ini lazim disebut di “manage”, karenanya manajemen informasi begitu penting untuk dipelajari.
STIKOM
Informasi untuk kemajuan teknologi dan industri terutama, informasi untuk kemajuan business, informasi untuk kemajuan perbankan dan seterusnya; Semua ini dalam jumlah yang begitu besar dan dalam kompleksitas ragamnya, membutuhkan keahlian manajemen, dagar dapat disajikan kepada para manager dan lain ahli dalam berbagai bidang untuk dimanfaatkan.
Di samping semua di atas, maka keahlian tentang alat komputer itu sendiri sangatlah besar artinya. Komputer adalah “jantung”nya sistem informasi yang begitu menguasai dunia ini, dan pengetahuan dan keahlian mengenai hal ini sama pentingnya dengan kemampuan manajemen informasi.
Alat komputer makin hari makin canggih dan makin besar keahlian untuk mengenalnya dan memakainya.
Kedua tersebut di atas, manajemen informasi dan teknik komputer adalah dua sisi dari satu mata uang yang sama. Tertanda Prof.Dr.Marsetio Donosepoetro (Mantan Dubes UNESCO).
STIKOM
BAB III
TEORI PENUNJANG
Pada bab tiga penulis menjelaskan tentang teori penunjang kerja praktek yang
telah dikerjakan.
3.1 Mikrokontroler ATMega16
AVR merupakan seri mikrokontroler CMOS 8-bit buatan Atmel, berbasis
arsitektur Reduced Instruction Set Computer (RISC). Hampir semua instruksi dieksekusi dalam satu siklus clock. AVR mempunyai 32 register general-purpose, timer/counter fleksibel dengan mode compare, interrupt internaldaneksternal, serial UART, programmable watchdog timer, dan mode power saving, Analog to Didital Converter (ADC) danPulse With Modulation (PWM) internal.
AVR juga mempunyai In-system programmable flash on-chip yang
mengijinkan memori program untuk diprogram ulang dalam sistem menggunakan
hubungan Serial Peripheral Interface (SPI). ATMega16. ATMega16 mempunyai throughput mendekati 1 MIPS per MHz membuat disainer sistem untuk mengoptimasi konsumsi daya versus kecepatan proses. Beberapa keistimewaan dari
AVR ATMega16 antara lain:
1. Advanced RISC Architecture
130 Powerful Instructions–Most Single Clock Cycle Execution
32 x 8 General Purpose Fully Static Operation
STIKOM
Up to 16 MIPS Throughput at 16 MHz
On-chip 2-cycle Multiplier
2. Nonvolatile Program and Data Memories
8K Bytes of In-System Self-Programmable Flash
Optional Boot Code Section with Independent Lock Bits 512 Bytes EEPROM
512 Bytes Internal SRAM
Programming Lock for Software Security 3. Peripheral Features
Two 8-bit Timer/Counters with Separate Prescalers and Compare Mode Two 8-bit Timer/Counters with Separate Prescalers and Compare Modes One 16-bit Timer/Counter with Separate Prescaler, Compare Mode, and
Capture Mode
Real Time Counter with Separate Oscillator Four PWM Channels
8-channel, 10-bit ADC
Byte-oriented Two-wire Serial Interface Programmable Serial USART
4. Special Microcontroller Features
Power-on Reset and Programmable Brown-out Detection Internal Calibrated RC Oscillator
STIKOM
Six Sleep Modes: Idle, ADC Noise Reduction, Power-save, Powerdown, Standby and Extended Standby
5. I/O and Package
32 Programmable I/O Lines
40-pin PDIP, 44-lead TQFP, 44-lead PLCC, and 44-pad MLF 6. Operating Voltages
2.7-5.5V for ATMega16L 4.5-5.5V for ATMega16
Gambar 3.1 Mikrokontroler ATMega16
Sumber: ATMEL, 2011a
STIKOM
Pin-pin pada ATMega16 sebanyak 40-pin DIP (dual inline package)
ditunjukkan oleh gambar 3.1. Guna memaksimalkan performa, AVR menggunakan
arsitekturHarvard (dengan memori dan bus terpisah untuk program dan data).
3.1.1 Port SebagaiInput/Output Digital
ATMega16 mempunyai empat buah port yang bernamaPortA, PortB, PortC, dan PortD. Keempat port tersebut merupakan jalur bidirectional dengan pilihan internal pull-up. Tiap port mempunyai tiga buah register bit, yaitu DDxn, PORTxn,
dan PINxn. Huruf ‘x’mewakili nama huruf dari port sedangkan huruf ‘n’ mewakili nomor bit. Bit DDxn terdapat pada I/O address DDRx, bitPORTxn terdapat pada I/O address PORTx, dan bit PINxn terdapat pada I/O address PINx. Bit DDxn dalam register Data Direction Register (DDRx) menentukan arah pin. Bila DDxn diset 1
maka Px berfungsi sebagai pinoutput.
Bila DDxn diset 0 maka Px berfungsi sebagai pininput.Bila PORTxn diset 1 pada saat pin terkonfigurasi sebagai pininput, maka resistorpull-up akan diaktifkan.
Untuk mematikan resistor pull-up, PORTxn harus diset 0 atau pin dikonfigurasi sebagai pin output. Pin port adalah tri-state setelah kondisi reset. BilaPORTxn diset 1 pada saat pin terkonfigurasi sebagai pinoutput maka pinport akan berlogika 1. Dan
bila PORTxn diset 0 pada saat pin terkonfigurasi sebagai pin output maka pin port akan berlogika 0.
Saat mengubah kondisi port dari kondisi tri-state (DDxn=0, PORTxn=0) ke
STIKOM
itu kondisipull-up enabled (DDxn=0, PORTxn=1) atau kondisioutput low (DDxn=1, PORTxn=0).
Biasanya, kondisi pull-up enabled dapat diterima sepenuhnya, selama lingkungan impedansi tinggi tidak memperhatikan perbedaan antara sebuah strong high driverdengan sebuahpull-up. Jika ini bukan suatu masalah, maka bit PUD pada
register SFIOR dapat diset 1 untuk mematikan semuapull-up dalam semuaport. Peralihan dari kondisi input dengan pull-up ke kondisi output low juga menimbulkan masalah yang sama. Kita harus menggunakan kondisi tri-state
(DDxn=0, PORTxn=0) atau kondisi output high (DDxn=1, PORTxn=0) sebagai kondisi transisi.
Tabel 3.1 Konfigurasi pinport
Sumber :IT TelkomLibrary, 2008
Bit 2 – PUD :Pull-up DisableBila bit diset bernilai 1 makapull-up padaport
I/O akan dimatikan walaupun register DDxn dan PORTxn dikonfigurasikan untuk menyalakanpull-up (DDxn=0, PORTxn=1).
STIKOM
3.1.2 Timer
Timer/counter adalah fasilitas dari ATMega16 yang digunakan untuk
perhitungan pewaktuan. Beberapa fasilitas chanel dari timer/counter antara lain: counter channel tunggal, pengosongan data timer sesuai dengan data pembanding,
bebasglitch, tahap yang tepat PWM, pembangkitfrekwensi, event counter external..
3.1.2.1 Gambaran Umum
Gambar diagramblock timer/counter 8 bit ditunjukan pada gambar 3.2 Untuk penempatan pin I/O telah dijelaskan pada bagian I/O di atas. CPU dapat diakses
register I/O, termasuk dalam pin-pin I/O dan bit I/O. Device khusus register I/O dan
lokasi bit terdaftar pada deskripsitimer/counter 8 bit.
Gambar 3.2 Blok diagramtimer/counter
STIKOM
Sumber : Atmel, 2011b
3.1.2.2 Timing DiagramTimer/Counter
Timer/counter didesain sinkron clock timer (clkT0) oleh karena itu ditunjukkan sebagai sinyal enable clock pada gambar 3.3. Gambar ini termasuk
informasi ketika flag interrupt dalam kondisi set. Data timing digunakan sebagai dasar dari operasitimer/counter.
Gambar 3.3 Timing diagramtimer/counter, tanpaprescaling
Sumber : Atmel, 2011c
Sesuai dengan gambar 3.3 timing diagram timer/counter dengan prescaling
maksudnya adalahcounter akan menambahkan datacounter (TCNTn) ketika terjadi pulsa clock telah mencapai 8 kali pulsa dan sinyal clock pembagi aktif clock dan ketika telah mencapai nilai maksimal maka nilai TCNTn akan kembali ke nol. Dan
kondisiflag timerakan aktif ketika TCNTn maksimal.
STIKOM
3.2 Relay
Pengertian relay yang ada pada wikipedia (2010) adalah “suatu peranti yang
menggunakan elektromagnet untuk mengoperasikan seperangkat kontak saklar.
Susunan paling sederhana terdiri dari kumparan kawat penghantar yang dililit pada
inti besi. Bila kumparan ini dienergikan, medan magnet yang terbentuk menarik
armatur berporos yang digunakan sebagai pengungkit mekanisme saklar”.
3.2.1 Prinsip Kerja Relay
Relay pada dasarnya sama dengan prinsip kerja pada saklar, namun pada relay saklar dijalankan secara otomatis dengan memberikan catu daya pada coil
sebagai tegangan system pada relay. Ketikacoil mendapat energi listrik, maka akan timbul gaya elektromagnetik yang akan menarik armature yang berpegas yang juga akan menutup kontak yang terhubung padaoutput.
Relay memiliki tiga jenis kutub yaitu common (kutub acuan), normally close
(kutub yang dalam keadaan awal terhubung pada common), dan Normally Open (kutub yang pada awalnya terbuka dan akan terhubung dengan common saat kumparanrelay diberi arus listrik).
STIKOM
Dalam kerja praktek ini relay digunakan sebagai driver motor tangan pada robot yang dikombinasikan dengan beberapa komponen lain yang membantu kinerja
relay. Berikut rangkaianrelay.
Gambar 3.4 Gambar rangkaianrelay
Sumber :depokinstrument, 2010
3.3 Driver H-Bridge
“Sebuah h-bridge adalah suatu pengaturan transistor yang memungkinkan kontrol atas sirkuit motor DC. Artinya, dengan jembatan-H mikrokontroler, chip
STIKOM
logika, atau remot kontrol elektronik dapat memerintah motor untuk maju, mundur,
dan rem” (wikipedia, 2011a).
Driver h-bridgejuga merupakan salah satu pengendali motor DC dengan arus
yang lebih tinggi daripada menggunakan driver motor biasa seperti l298 atau l293. Driver h-bridge dapat mengendalikan motor DC lebih dari 3A.
Dimana besar arus yang dikeluarkan motor DC tergantung besar motor DC
dan beban pada robot, maka dari itu driver h-bridge membantu menstabilkan arus yang berasal dari tegangan sumber. Berikut rangkaiandriver h-bridge.
STIKOM
Gambar 3.5 Rangkaiandriver h-bridge Sumber : Cook, 2011
3.4 Motor DC
STIKOM
Motor arus searah, sebagaimana namanya, menggunakan arus langsung yang
tidak langsung/direct-unidirectional. Motor DC digunakan pada penggunaan khusus
di mana diperlukan penyalaantorqueyang tinggi atau percepatan yang tetap.
Komponen utama motor DC :
1. Kutub medan
Secara sederhana digambarkan bahwa interaksi dua kutub magnet akan
menyebabkan perputaran pada motor DC. Motor DC memiliki kutub medan yang
stasioner dan dynamo yang menggerakan bearing pada ruang di antara kutub medan. Motor DC sederhana memiliki dua kutub medan yaitu kutub utara dan
kutub selatan.
2. Dynamo
Bila arus masuk menuju dynamo, maka arus ini akan menjadi dynamo magnet. Dynamo yang berbentuk silinder, dihubungkan ke as penggerak untuk
menggerakan beban. Untuk kasus motor DC yang kecil, dynamo berputar dalam medan magnet yang dibentuk oleh kutub-kutub, sampai kutub utara dan selatan
magnet berganti lokasi. Jika hal ini terjadi, arusnya berbalik untuk merubah
kutub-kutub utara dan selatandynamo. 3. Commutator
Kegunaan komponen ini adalah untuk membalikan arah arus listrik dalam
dynamo. Commutator juga membantu dalam transmisi arus antara dynamo dan
sumber daya.
STIKOM
Gambar 3.6 Motor DC
Sumber :Artha, 2011
3.5 Rotary Encoder
Fungsi rotary encoder pada robot KRI adalah untuk menghitung jumlah putaran yang telah terjadi pada motor ketika robot berbelok. Pengertian dari rotary
encoder seperti adalah “Rotary encoders digunakan dalam berbagai aplikasi yang
membutuhkan sensor perputaran yang presisi” (wikipedia, 2011b).
3.6 Sensor Cahaya
Sensor cahaya ini terdiri dari sebuah LED ultrabright dan photodiode. Di mana LEDultrabright digunakan sebagaitransmiter danphotodide sebagaireceiver.
Antara kakiphotodiode dan resistor akan mengeluarkan tegangan sesuai denganinput tegangan yang diterima olehphotodiode dari pantulan LED.
STIKOM
Gambar 3.7 Rangkaian sensor cahaya
Sumber : Kuncoro, 2009
3.6.1 Photodiode
“Photodiode adalah jenis photodetektor yang mampu mengubah cahaya
menjadi tegangan” (wikipedia, 2011c).
STIKOM
3.6.2 Komparator
Komparator adalah sebuat rangkaian yang dapat membandingkan besar
tegangan masukan. Komparator biasanya menggunakan Op-Amp atau ic LM339
sebagai piranti utama dalam rangkaian.
Gambar 3.8 Rangkaian komparator
Sumber : Atmelmikrokontroler, 2010
3.7 LimitSwitch
Pada dasarnya prinsip kerja limitswitch sama dengan prinsip kerjarelay yaitu sesuai dengan sakelar. Di mana pada kaki-kakinya memiliki 3 inputan yaitunormally
STIKOM
close, normally open, dan common. Pada keadaan awal kaki normally close tersambung dengan kaki common dan jika ditekan, maka kaki normally open akan
tersambung dengancommon. Adapun rangkaian limitswitch seperti yang ditunjukkan pada gambar berikut.
Gambar 3.9 Limitswitch
Sumber : Garage, 1998
3.8 Rangkaian Reset
STIKOM
Chandra MDE (2011) menjelaskan sebagai berikut :
Rangkaian reset adalah Pin reset pada mikrokontroler ATMEL AVR adalah
aktif low. Jika sebuah sinyal low diaplikasikan pada pin ini, maka mikrokontroler
akan direset. Peresetan sistem dilakukan dengan tujuan :
1. Untuk ‘melepas’ semua pin (kecuali pin-pin XTAL) untuk masuk ke keadaan
tri-state, menginisialisasi semua register I/O, dan mereset program counter
(PC=0).
2. Untuk memasuki mode pemrograman paralel.
Jalur reset memiliki resistor pull-up internal berukuran 100k-500k ohm. Secara teori, resistor pull-up tersebut berfungsi menahan pin reset pada logika high dan tidak mengambang. Resistor pull-up juga berfungsi sebagai penahan dari noise yang diakibatkan oleh pengaruh lingkungan luar yang tinggi.
STIKOM
Gambar 3.10 Rangkaian reset AVR
STIKOM
BAB IV
METODE KERJA PRAKTEK
Pada bab empat menjelaskan tentang metode dalam pengerjaan kerja
praktek yang disertai dengan cara-cara pembuatan sistem kontrol dan
pemrograman robot menggunakanCode Vision AVR (CVAVR).
Metode yang digunakan dalam pengerjaan kerja praktek ini adalah sebagai
berikut :
1. Wawancara, yaitu bertanya secara langsung kepada asisten laboratorium
mikrokontroler untuk mendapatkan data-data serta informasi yang
berhubungan dengan kerja praktek.
2. Studi literatur, yaitu dengan mempelajari dan membaca buku, maupun
literatur lainnya yang berkaitan dengan objek kerja praktek termasuk
permasalahan yang dihadapi.
Berikut merupakan cara-cara pembuatan sistem kontrol dengan
menggunakanOrcad 9.23 dan pemrograman menggunakan CVAVR.
4.1 Pembuatan Minimum Sistem
ProgramOrcad 9.23 merupakansoftwareyang digunakan penulis sebagai,
pembuatan schematic rangkaian elektronika beserta cara pembuatan layout
Printed Circuit Board (PCB). Berikut langkah-langkah untuk menjalankan Orcad
9.23 :
1. Jalankan programOrcad 9.23 yang ada pada komputer mulai dari
STIKOM
Start windows pilihall program
Setelah all program pilih Orcad unison suite pilih capture
(digunakan untuk membuatschematic elektronik) seperti yang tampak
pada Gambar 4.1.
STIKOM
Gambar 4.1 Cara membuka programOrcad 9.23 dan jendela awalcapture pada
Orcad 9.23
STIKOM
2. Persiapan untuk membuat project baru, langkah-langkahnya sebagai
berikut:
Klik menu file, kemudian pilih new project. Sehingga akan
tampil seperti pada Gambar 4.2.
STIKOM
Gambar 4.2 Dialognew file project
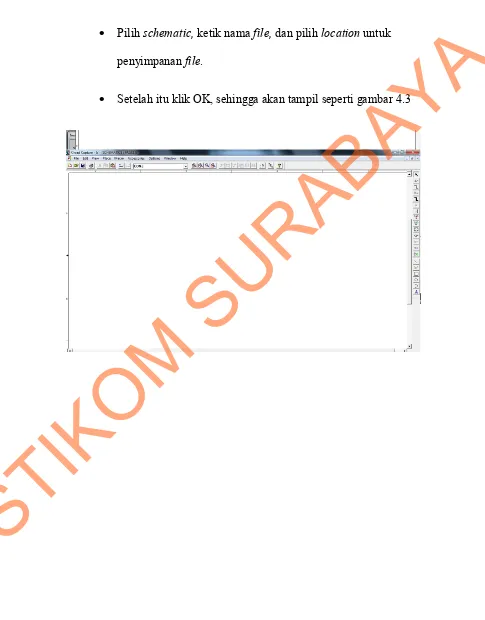
Pilihschematic, ketik namafile, dan pilihlocation untuk
penyimpananfile.
Setelah itu klik OK, sehingga akan tampil seperti gambar 4.3
STIKOM
Gambar 4.3 Lembar kerjaOrcad 9.23
3. Siap untuk membuat sistem kontrol pada robot.
4. Sebagai berikut merupakan rangkaian sistem kontrol pada robot mankara.
STIKOM
STIKOM
Gambar 4.4 Rangkaianh-bridge
STIKOM
Gambar 4.5 Schematic minimum system
STIKOM
Gambar 4.6 Rangkaianrelay
5. Untuk membuat schematic menjadi PCB maka langkah berikutnya
membuatlayout, langkah-langkah sebagai berikut :
Gambar schematic yang telah dibuat merupakan file yang ber
ekstensi (.dsn). Untuk membuat layout PCB membutuhkan file
yang berekstensi (.MNL) langkah yang harus dilakukan adalah
minimize project hingga terlihat dialog seperti gambar 4.7.
STIKOM
STIKOM
Gambar 4.7 Dialogfile ekstensi (.dsn)
Lalu klik padaproject lalu pilih menuTool creat netlist,
sehingga tampil seperti pada gambar 4.8.
STIKOM
Gambar 4.8 Create netlist
STIKOM
Setelah create netlist akan tampil diolog seperti gambar 4.8
lalu pilihlayout pada menuoption pilihuser properties are in
inches lalu klik OK. Selanjtnya lihat pada dialog project tadi
pastikan pada Outputnya sudah membentuk ekstension file .mnl
seperti pada gambar 4.9.
STIKOM
STIKOM
Gambar 4.9 fileekstensi (.mnl)
6. Setelahfile telah berekstensikan (.mnl), maka langkah selanjutnya sebagai
berikut :
Start windows pilihall program
Setelah allprogram pilih Orcad unison suite pilih layout
(digunakan untuk membuat layout PCB) seperti yang tampak pada
Gambar 4.10.
STIKOM
Gambar 4.10 Cara membuka programOrcad 9.23 dan jendela awallayout pada
Orcad 9.23
Klik filenew
STIKOM
Lalu pilihdirectory c: cadenceOrcad 9.23tools layout
data default.tch.
Gambar 4.11 Pencariandefault.tch
STIKOM
Setelah memilihdefault.tch, carifile daricaptureyang telah dibuat
yang telah berekstensikan (.mnl), hingga muncul dialog seperti
pada gambar 4.12.
Gambar 4.12 Memilih tipe komponen
Kemudian pilihlink exiting footprint to component, hingga muncul
gambar untuk pemilihan komponen.
STIKOM
Gambar 4.13 Langkah pencarian komponen
Setelah semua komponen telah dipilih, langkah selanjutnya adalah
me-routing jalur untuk dibuat menjadi PCB. Ada dua cara untuk
me-routing jalur yaitu dengan manual route dan auto route.
Berikut contoh gambar desain PCB yang sudah jadi.
STIKOM
Gambar 4.14 Desain PCBminimum system
6..2CVAVRProgrammer
CVAVR Programmer adalah software yang digunakan untuk membuat
program dengan menggunakan bahasa C. Di dalam program CVAVR hanya
digunakan untuk mikrokontroler tipe Atmel yang memiliki beberapa kelebihan
daripada tipe MCS. Salah satu kelebihan CVAVR yaitu program yang diketikkan
dengan menggunakan bahasa C dapat dicompile secara langsung tanpa compiler
STIKOM
lain untuk mendownload ke dalamchip mikrokontroler. Berikut langkah-langkah
menjalankan CVAVR :
1. Jalankan program CVAVR yang ada pada komputer,hingga muncul
jendela awal sesuai pada Gambar 4.15.
STIKOM
Gambar 4.15 Tampilan awal CVAVR
2. Langkah-langkah membuat program sebagai berikut :
Pilih menufilenew, jika muncul dialog seperti pada gambar
4.16 pilihproject.
Gambar 4.16 Create new file
Setelah itu pilih OK dan akan muncul dialog konfirmasi pilihyes.
Setelah itu akan muncul pemilihan tipe ic mikrokontroler yang
akan dibuat.
STIKOM
Gambar 4.17 pemilihan tipeic mikrokontroler
Kemudian muncul codewizardAVR yang digunakan untuk
konfigurasi pin I/O, LCD, komunikasi serial, komunikasi I2C,
timer/counter, dll.
STIKOM
Gambar 4.18 CodewizardAVR
STIKOM
Langkah selanjutnya pilih programgenerate, save and exit
Setelah itu akan muncul dialog untuk penyimpananfile dan dialog tersebut
akan muncul sebanyak 3 kali dengan ekstensi .c, .prj, dan .cwp.
Mikrokontroler siap diprogram seperti pada gambar 4.19
STIKOM
Gambar 4.19 Lembar kerja CVAVR
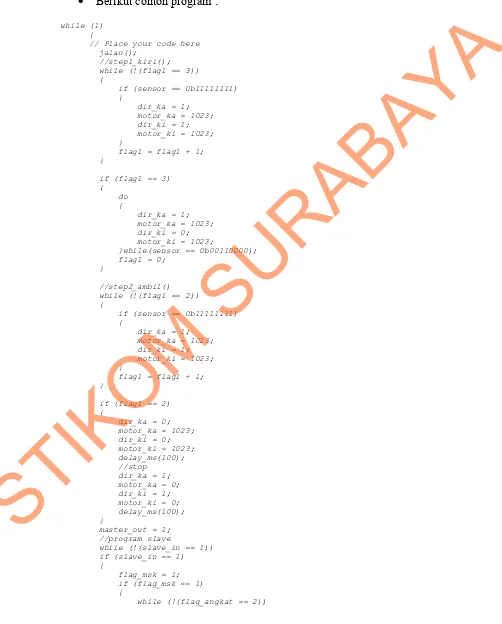
Berikut contoh program :
while (1) {
// Place your code here jalan();
//step1_kiri(); while (!(flag1 == 3)) {
if (sensor == 0b11111111) {
dir_ka = 1; motor_ka = 1023; dir_ki = 1;
motor_ki = 1023; }
flag1 = flag1 + 1; }
if (flag1 == 3) {
do {
dir_ka = 1; motor_ka = 1023; dir_ki = 0; motor_ki = 1023;
}while(sensor == 0b00110000); flag1 = 0;
}
//step2_ambil() while (!(flag1 == 2)) {
if (sensor == 0b11111111) {
dir_ka = 1; motor_ka = 1023; dir_ki = 1;
motor_ki = 1023; }
flag1 = flag1 + 1; }
if (flag1 == 2) {
dir_ka = 0; motor_ka = 1023; dir_ki = 0;
motor_ki = 1023; delay_ms(100); //stop
dir_ka = 1; motor_ka = 0; dir_ki = 1; motor_ki = 0; delay_ms(100); }
master_out = 1; //program slave
while (!(slave_in == 1)) if (slave_in == 1) {
flag_msk = 1; if (flag_msk == 1)
STIKOM
{
angkat_ka = 1;
flag_angkat = flag_angkat + 1; }
if (flag_angkat == 2) {
angkat_ka = 0; naik = 1; delay_ms(1000); naik = 0; flag_angkat = 0; }
while (!(sensor_ptr == 0))
if (sensor_ptr == 1) {
while (!(flag_angkat == 2)) {
angkat_ka = 1;
flag_angkat = flag_angkat + 1; }
if (flag_angkat == 2) {
angkat_ki = 1; naik = 1; delay_ms(1000); naik = 0; flag_angkat = 0; }
}
flag_msk = 0; }
slave_out = 1; }
//balik ke master if (master_in == 1) {
flag_in = 1; if (flag_in == 1) {
master_out = 0; //mundur } } }; } /* void step1_kiri() { }*/ void jalan() {
if (sensor == 0b11000000) {
dir_ka = 1; motor_ka = 1000; dir_ki = 1; motor_ki = 1023; }
if (sensor == 0b00110000) {
dir_ka = 1; motor_ka = 1110;
STIKOM
if (sensor == 0b00001100) {
dir_ka = 1; motor_ka = 1023; dir_ki = 1;
motor_ki = 1110; }
if (sensor == 0b00000011) {
dir_ka = 1; - motor_ka = 1023; dir_ki = 1; motor_ki = 1023; }
if (sensor == 0b00001100) {
dir_ka = 1; motor_ka = 1023; dir_ki = 1;
motor_ki = 1023; }
if (sensor == 0b00000110) {
dir_ka = 1; motor_ka = 1000; dir_ki = 1; motor_ki = 1023; }
if (sensor == 0b00000011) {
dir_ka = 0; motor_ka = 950; dir_ki = 1; motor_ki = 1023; }
if (sensor == 0b00000001) {
dir_ka = 0; motor_ka = 1023; dir_ki = 1; motor_ki = 1023; }
}
Setelah pembuatan program selesai, maka program siap di
download ke mikrokontroler.
Sebelumdownload programsetting project configure : pilih menu
projectpilihafter build centangprogram the chip.
STIKOM
Gambar 4.20 Configure project
Setelah itu OK
STIKOM
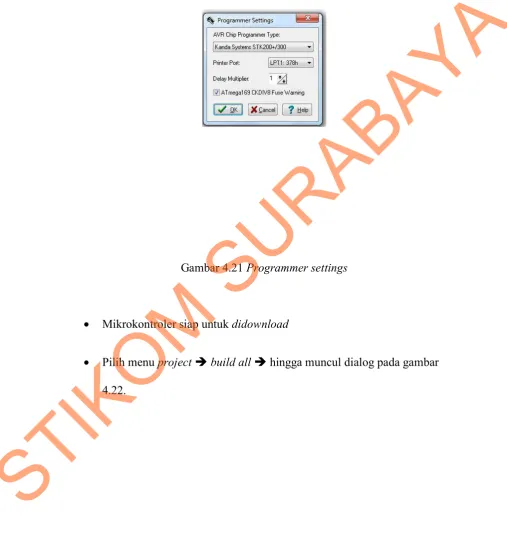
Kemudian pilih menu settings programmer pilih kanda system
[image:72.595.47.555.171.714.2]STK200+/300 (untuk konfigurasi paralel port), seperti muncul pada
gambar 4.21.
Gambar 4.21 Programmer settings
Mikrokontroler siap untuk didownload
Pilih menu projectbuild all hingga muncul dialog pada gambar
4.22.
STIKOM
Jika tidak adaerror, klik program the chip
Gambar 4.22 Prosesdownload program
Program telah masuk dan siap untuk dicoba.
STIKOM
BAB V
HASIL DAN PEMBAHASAN
Pada Kontes Robot Indonesia yang mengusung tema “Membangun Candi
Prambanan”, tim robot STIKOM Surabaya dengan nama “O3STAD_11K”
merancang sebuah robot yang sesuai dengan tema perlombaan. Di mana dalam
pebahasan kerja praktek ini hanya membahas tentang robot Mankara.
Pada rule pertandingan tugas robot Mankara adalah meletakkan balok
pada base yang telah disediakan di lapangan pertandingan. Setelah robot selesai
meletakkan balok pada base, robot kembali ,mengambil golden block secara
otomatis yang akan di letakkan di atas balok pertama. Point untuk meletakkan
balok pada base sempurna adalah 4 point dan point untuk meletakkan golden
block adalah 20 point. Gambar 5.1 adalah foto tim robot O3STAD_11K.
STIKOM
Gambar 5.1 Tim O3TAD_11K
[image:75.595.111.553.167.462.2]5.1 Hasil PercobaanRunning Test I Regional IV
Tabel 5.1 Running testI
Percobaan ke Base Golden block Permasalahan Solusi 1 Tidak berhasi l Tidak berhasi l Bentuk lapangan
tidak sama dengan
rule pertandingan. Program ulang 2 Tidak berhasi l Tidak berhasi l Sensor tidak mendeteksi dapat mendeteksi garis dengan baik
Set ulang sensor.
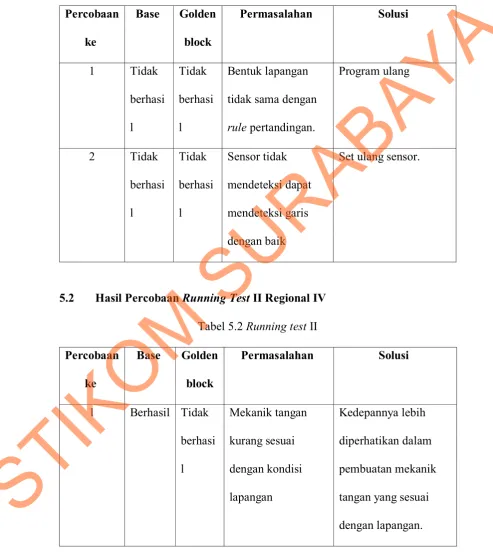
5.2 Hasil PercobaanRunning TestII Regional IV
Tabel 5.2 Running testII
Percobaan
ke
Base Golden
block
Permasalahan Solusi
1 Berhasil Tidak
berhasi l Mekanik tangan kurang sesuai dengan kondisi lapangan Kedepannya lebih diperhatikan dalam pembuatan mekanik
tangan yang sesuai
dengan lapangan.
STIKOM
5.3 Hasil PercobaanRunning TestIII Regional IV
Tabel 5.3 Running testIII
Percobaan
ke
Base Golden
block
Permasalahan Solusi
1 Berhasil Tidak
berhasi l Mekanik tangan kurang sesuai dengan kondisi lapangan
Kedepannya lebih
diperhatikan dalam
pembuatan mekanik
yang sesuai dengan
lapangan.
5.4 Hasil Percobaan Babak Penyisihan Regional IV
Tabel 5.4 Babak penyisihan
Babak ke- Base Golden
block
Permasalahan Solusi
I Berhasil Tidak
berhasi l Mekanik tangan kurang sesuai dengan kondisi lapangan
Kedepannya lebih
diperhatikan dalam
pembuatan mekanik
yang sesuai dengan
lapangan.
II Berhasil Tidak
berhasi
Mekanik tangan
kurang sesuai
Kedepannya lebih
diperhatikan dalam
STIKOM
l dengan kondisi
lapangan
pembuatan mekanik
yang sesuai dengan
lapangan.
5.5 Hasil Percobaan Babak 16 Besar Regional IV
Tabel 5.5 Babak 16 besar
Percobaan
ke
Base Golden
block
Permasalahan Solusi
I Berhasil Tidak
berhasil
Mekanik tangan
kurang sesuai
dengan kondisi
lapangan
Kedepannya lebih
diperhatikan dalam
pembuatan mekanik
yang sesuai dengan
lapangan.
5.6 Hasil Percobaan Babak 8 Besar Regional IV
Tabel 5.6 Babak 8 besar
Percobaan ke Base Golden block Permasalahan Solusi I Tidak berhasil Tidak berhasil Sensor tengah tidak dapat mendeteksi garis dengan baik Retry
II berhasil Tidak
berhasil
Mekanik tangan
kurang sesuai
Kedepannya lebih
diperhatikan dalam
STIKOM
dengan kondisi
lapangan
pembuatan mekanik
yang sesuai dengan
lapangan.
5.7 Hasil Percobaan Babak Semifinal Regional IV
Tabel 5.7 Babak semifinal
Percobaan
ke
Base Golden
block
Permasalahan Solusi
I Berhasil Tidak
berhasil
Terjadi tabrakan
dengan Pens
Surabaya
Semoga kedepannya
tidak bertemu Pens di
babak semifinal
melainkan di babak
final
5.8 Hasil Percobaan Babak Final Regional IV
Tabel 5.8 Babak final
Percobaan ke Base Golden
II Berhasil Tidak berhasi l Mekanik tangan kurang sesuai dengan kondisi lapangan
Kedepannya lebih
diperhatikan dalam
pembuatan mekanik
yang sesuai dengan
lapangan.
5.9 Hasil PercobaanRunning Test I Nasional
Tabel 5.9 Running testI
Percobaan ke Base Golden block Permasalahan Solusi 1 Tidak berhasi l Tidak berhasi l
Sensor tidak peka
terhadap lapangan
Set ulang sensor
2 Tidak berhasi l Tidak berhasi l
Sensor garis tidak
dapat mendeteksi
garis dengan baik
dikarenakan sorot
lampu yang sangat
terang.
Memberi penutup pada
sensor agar tidak
terkena intervensi dari
luar.
5.10 Hasil PercobaanRunning TestII Nasional
Tabel 5.10 Running testII
1 Berhasil Tidak berhasi l Mekanik tangan kurang sesuai dengan kondisi lapangan Kedepannya lebih diperhatikan dalam pembuatan mekanik
tangan yang sesuai
dengan lapangan.
5.11 Hasil PercobaanRunning TestIII Nasional
Tabel 5.11 Running testIII
Percobaan
ke
Base Golden
block
Permasalahan Solusi
1 Berhasil Tidak
berhasi l Mekanik tangan kurang sesuai dengan kondisi lapangan
Kedepannya lebih
diperhatikan dalam
pembuatan mekanik
yang sesuai dengan
lapangan.
5.12 Hasil Percobaan Babak Penyisihan Nasional
Tabel 5.12 Babak penyisihan
Babak ke- Base Golden
block
Permasalahan Solusi
I Berhasil Tidak
berhasi
Mekanik tangan
kurang sesuai
Kedepannya lebih
diperhatikan dalam
STIKOM
l dengan kondisi
lapangan
pembuatan mekanik
yang sesuai dengan
lapangan.
II Berhasil Tidak
berhasi l Mekanik tangan kurang sesuai dengan kondisi lapangan
Kedepannya lebih
diperhatikan dalam
pembuatan mekanik
yang sesuai dengan
lapangan.
5.13 Hasil Percobaan Babak 16 Besar Nasional
Tabel 5.13 Babak 16 besar
Percobaan
ke
Base Golden
block
Permasalahan Solusi
I Berhasil Tidak
berhasil
Mekanik tangan
kurang sesuai
dengan kondisi
lapangan
Kedepannya lebih
diperhatikan dalam
pembuatan mekanik
yang sesuai dengan
lapangan.
5.14 Prestasi Tim Robot KRI
Pada ajang tahunan yang diadakan oleh Dirjen Pendidikan Nasional
Indonesia, dimana tim robot STIKOM Surabaya mengirimkan wakil terbaiknya
untuk beradu ketangkasan robot dengan perguruan tinggi di seluruh Indonesia.
STIKOM
Tahun 2010 adalah pencapaian terbaik tim robot STIKOM Surabaya selama ini.
Tim “O3TAD_11K” berhasil meraih prestasi sebagai berikut:
1. Mencapai juara IV tingkat regional IV.
2. Mencapai babak 16 besar tingkat nasional.
STIKOM
BAB VI
PENUTUP
6.1 Kesimpulan
Dari hasil percobaan pada pertandingan dapat disimpulkan sebagai
berikut:
1. Robot tidak pernah berhasil memasukkangoden block. Hal ini disebabkan
mekanik tangan yang kurang sempurna.
2. Gerak robot masih kurang sempurna yang diakibatkan sistem kontrol yang
kurang baik, terutama di bagianline tracer.
3. Robot selalu mampu meletakkan balok pada base pertama, tetapi
terkadanng sensor kurang peka terhadap kondisi lapangan yang
menyebabkan harus melakukanretry dalam pertandingan.
6.2 Saran
1. Untuk kedepannya tim robot STIKOM Surabaya untuk tetap ikut dalam
kontes tahunan yang diadakan oleh Dirjen Pendidikan Nasional demi
mngasah keterampilan mahasiswa..
2. Diharapkan anggota tim robot STIKOM Surabaya diikut sertakan dalam
berbagai workshop tentang robotika yang akan menambah wawasan
mereka.
3. Dalam pembuatan mekanik robot kedepannya diharapkan menggunakan
beberapa perhitungan, misalnya mencari titik berat, torsi yang dihasilkan
STIKOM
motor DC, dan torsi yang dibutuhkan oleh robot keseluruhan. Sehingga
akan didapatkan gerak robot yang seimbang.
4. Melakukan research tentang motor driver, karena motor driver yang
digunakan selama ini masih kurang sempurna.
5. Metode pengontrolan robot harus lebih disempurnakan.
6. Diharapkan tim robot generasi selanjutnya dapat meraih prestasi yang
lebih tinggi dan mempertahankan prestasi yang sudah ada.
STIKOM
DAFTAR PUSTAKA
Artha, Zulfikar, 2011. Motor DC dan Servo. (Online).
(httphttp://zulfikarartha.blogspot.com/2010_11_01_archive.html,
diakses 23 Maret 2011).
Atmel Corporation, 2011a. ATMega16. (Online).
(http://www.datasheetdir.com/ATMEGA16-16AI+AVR-microcontroll
ers, diakses 23 Maret 2011).
Atmel Corporation, 2011b. Blog diagram timer/counter.
(Online).(http://www.datasheetdir.com/ATMEGA16-16AI+AVR-micr
ocontrollers, diakses 23 Maret 2011).
Atmel Corporation, 2011c. Timing diagram timer/counter, tanpa prescaling.
( O n l i n e ) .
(http://www.datasheetdir.com/ATMEGA16-16AI+AVR-microcontroll
ers, diakses 23 Maret 2011).
Atmelmikrokontroler, 2010. Komparator tegangan. (Online).
(http://atmelmikrokontroler.wordpress.com/2009/06/25/komparator-te
gangan/, diakses 23 Maret 2011).
Chandra MDE, 2011. AVR-rangkaian reset (Online).
(http://telinks.wordpress.com/2008/12/31/rangkaian-reset/, diakses 23
Maret 2011).
Cook, David, 2011. H-Bridge Motor Driver Using Bipolar Transistors. (Online).
(http://en.wikipedia.org/wiki/H_bridge, diakses 23 Maret 2011).
STIKOM
Depokinstrument, 2010. Seulas teori relay. (Online).
(http://depokinstruments.com/2010/02/20/seulas-teori-relay/, diakses
23 Maret 2011).
Garage, Clark’s, 1998. Limit Switch (Online).
(http://www.clarks-garage.com/shop-manual/elect-18.htm, diakses 23
Maret 2011).
IT Telkom Library, 2008. Konfigurasi pin port. (Online).
(http://www.ittelkom.ac.id/library/, diakses 23 Maret 2011).
Kuncoro, Giri, 2009. Membuat Robot Line Follower Sederhana. (Online).
(http://pentriloquist.wordpress.com/2009/01/09/membuat-robot-line-fo
llower-sederhana/, diakses 23 Maret 2011).
Wikipedia, 2010. relai. (Online). (http://id.wikipedia.org/wiki/Relai, diakses 23
Maret 2011).
Wikipedia, 2011a. Driver H-Bridge. (Online).
(http://en.wikipedia.org/wiki/H_bridge, diakses 23 Maret 2011).
Wikipedia, 2011b. Rotary Encoder. (Online).
(http://en.wikipedia.org/wiki/Rotary_encoder, diakses 23 Maret 2011).
Wikipedia, 2011c. Photodiode. (Online).
(http://en.wikipedia.org/wiki/Photodiode, diakses 23 Maret 2011).