LAPORAN KERJA PRAKTEK
PERANCANGAN DAN PEMBUATAN ROBOT OTOMATIS 2 DALAM KONTES ROBOT INDONESIA 2011 DI LABORATORIUM
MIKROKONTROLER
STIKOM SURABAYA
Oleh :
Moh Nashrul Hafidz (08.41020.0065)
SEKOLAH TINGGI
MANAJEMEN INFORMATIKA & TEKNIK KOMPUTER
SURABAYA
2011
STIKOM
i
KRI (Kontes Robot Indonesia) merupakan perlombaan yang diselenggarakan setiap tahun mengikuti Kontes Robot Internasional yaitu ABU Robocon. Setiap perguruan tinggi berhak mengirimkan mahasiswanya untuk mengikuti kontes robot tersebut. Sehingga melalui jurusan S1 Sistem Komputer, STIKOM (Sekolah tinggi manejemen informatika dan teknik komputer) Surabaya mengikuti dalam perlombaan KRI 2011.
Untuk mengikuti kontes robot tersebut diperlukan kemampuan untuk merancang rangkaian elektronika, minimum system mikrokontroler dan mekanik yang baik dalam mengimplementasikan hasil rancangan tersebut kedalam dunia nyata. Merancang sistem kontrol yang sesuai dengan tugas robot tidaklah sederhana. Diperlukan pengetahuan tentang mikrokontroler, motor driver dan rangkaian yang lainya untuk mendukung gerakan robot.
Sensor yang digunakan untuk menggerakan robot dapat menggunakan bermacam-macam antara lain sensor photodioda, sensor rotary encoder dan sensorlimith switch. Setiap sensor memiliki fungsi masing-masing sesuai dengan karakteristik sensor tersebut. Untuk menggerakan motor DC dapat menggunakan relay yang dirangkaikan dengan komponen lain sehingga dapat di pulse melalui minimum system mikrokontroler.
.
STIKOM
iv
DAFTAR ISI
Halaman
ABSTRAKSI..………...i
KATA PENGANTAR…..….………...ii
DAFTAR ISI.………....iv
DAFTAR GAMBAR………...viii
DAFTAR TABEL…..…...………...x
BAB I PENDAHULUAN 1.1 Latar Belakang Masalah..………....1
1.2 Rumusan Masalah………1
1.3 Batasan Masalah………..2
1.4 Tujuan………...2
1.5 Kontribusi………2
1.6 Sistematika Penulisan……….…...………..2
STIKOM
BAB II GAMBARAN UMUM STIKOM SURABAYA
2.1 Sejarah dan Perkembangan…………...………..4
2.2 Jenis Usaha……….……..10
2.3 Visi, Misi Dan Komitmen STIKOM Surabaya……….….…..10
2.4.1 Visi STIKOM Surabaya………10
2.4.2 Misi STIKOM Surabaya………....11
2.4.3 Komitmen STIKOM Surabaya………...12
BAB III TEORI PENUNJANG 3.1 Mikrokontroler ATMega8535……….………....13
3.1.1 Konstruksi ATMega8535………...14
3.1.2 Pin-pin pada Mikrokontroler ATmega8535………..…….17
3.2 Driver Relay………...………..20
3.2.1 Prinsip kerja Relay…...………...….20
3.3 Motor DC ………....21
3.4 Sensor ………....….22
STIKOM
vi
3.4.1 Rotary
encoder……….………..…………...22
1.1..2 Photodioda………...…....23
1.1..3 Limit switch...24
1..5 ICDecoder 74LS138...25
3.5.1 Prinsip kerja ICDecoder 74LS138...26
BAB IV METODE KERJA PRAKTEK 4.1 Desain mekanik…………..……….…27
4.1.1 Bentuk robot………...27
4.1.2 Ukuran robot………...28
4.1.3 Bahan-bahan pembuatan robot………...29
4.2 Desain perangkat keras...30
4.2.1 Diagram blok………..30
4.2.2 Perancangan minimum system ATmega8535………….…31
4.2.3 Perancangan ICDecoder 74LS138……….35
4.2.4 Pembuatan rangkaian PCB……….36
4.2.5 Perancangan motordriver………...36
4.3 Desain perangkat lunak……….….37
4.3.1 Flowchart………37
STIKOM
4.3.2 Program Codevision AVR………..39
BAB V HASIL DAN PEMBAHASAN 5.1 Pengujian sensorphotodioda ………..……46
5.1.1 Tujuan……….46
5.1.2 Prosedur………..46
5.1.3 Hasil………...46
5.1.4 Pembahasan………47
5.2 Pengujian sensorrotary encoder………..……47
5.2.1 Tujuan……….47
5.2.2 Prosedur………..47
5.2.3 Hasil………...48
5.2.4 Pembahasan………48
5.3 Pengujian sensorlimit switch... ………...49
5.3.1 Tujuan……….49
5.3.2 Prosedur………..49
5.3.3 Hasil………...49
5.3.4 Pembahasan………50
5.4 Pengujian rangkaian motordriver.... ………...50
STIKOM
viii
5.4.1
Tujuan……….50
5.4.2 Prosedur………..50
5.4.3 Hasil………...50
5.4.4 Pembahasan………51
5.5 Pengujian rangkaian ICDecoder 74LS138………..51
5.5.1 Tujuan……….51
5.5.2 Prosedur………..51
5.5.3 Hasil………...52
5.5.4 Pembahasan………52
5.6 Pengujian rangkaian relay...………...52
5.6.1 Tujuan……….52
5.6.2 Prosedur………..53
5.6.3 Hasil………...53
5.6.4 Pembahasan………53
5.7 Pengujian rangkaian minimum system mikrokontroler....………...54
5.7.1 Tujuan……….54
5.7.2 Prosedur………..54
5.7.3 Hasil………...54
5.7.4 Pembahasan………55
STIKOM
BAB VI PENUTUP, KESIMPULAN DAN SARAN
6.1 kesimpulan………...56
6.2 saran………...56
DAFTAR PUSTAKA………...57
STIKOM
1 BAB I PENDAHULUAN
1.1 Latar Belakang Masalah
KRI ( Kontes Robot Indonesia ) merupakan agenda tahunan yang diadakan oleh
Direktoral Jendral Pendidikan Nasional. Setiap perguruan tinggi di seluruh Indonesia
berhak untuk mengirimkan mahasiswanya untuk mengikuti perlombaan tersebut. Begitu
juga STIKOM (Sekolah Tinggi Manajemen Informatika dan Teknik Komputer) Surabaya
melalui jurusan S1 Sistem Komputer.
Setiap tahun tema perlombaan berubah–ubah yang disamakan dengan Kontes Robot Internasional yaitu ABU Robocon. Tema ABU Robocon 2011 adalah “Loy Krathong” sedangkan KRI 2011 adalah “Larungan” .Terdapat satu robot manual dan dua robot otomatis (otomatis 1 dan otomatis 2). Setiap robot bekerja sesuai dengan tugasnya
masing–masing yang sudah ditentukan dalam peraturan. Dalam laporan kerja praktek ini dilakukan rancang bangun robot otomatis yang akan diperlombakan dalam KRI 2011.
1.2 Perumusan Masalah
Adapun rumusan masalah dalam kerja praktek ini adalah :
1. Bagaimana merancang dan membuat minimum system mikrokontroler yang sesuai
dengan tugas robot ?
2. Bagaimana merancang dan membuat sensor yang sesuai dengan tugas robot ?
3. Bagaimana merancang dan membuat motor driver yang digunakan untuk
menggerakan Motor DC ?
4. Bagaimana merancang aktuator yang sesuai dengan tugas robot ?
5. Bagaimana merancang dan membuat mekanik robot yang sesuai dengan tugas robot ?
STIKOM
1.3 Batasan Masalah
Adapun batasan masalah dalam kerja praktek ini adalah :
1. Dimensi robot tidak boleh melebihi panjang 1 meter, lebar 1 meter dan tinggi 1.5
meter.
2. Batas maksimal catu daya yang digunakan pada suatu rangkaian adalah 24 volt.
3. Jenis mikrokontroler yang digunakan pada aplikasi robotika ini adalah ATMega8535.
1.4 Tujuan
Tujuan dari kerja praktek ini adalah merancang dan membangun robot otomatis
yang dapat berjalan mengikuti garis, berjalan menanjak, dan mengambil objek untuk
mengikuti Kontes Robot Indonesia 2011.
1.5 Kontribusi
Adapun kontribusi dari kerja praktek ini terhadap instansi STIKOM Surabaya
adalah keikutsertaan STIKOM Surabaya dalam Kontes Robot Indonesia 2011 sebagai
perguruan tinggi di bidang teknologi informasi terutama Program Studi S1 Sistem
Komputer yang mempelajari bidang otomasi industri.
1.6 Sistematika Penulisan
Penulisan laporan disusun dengan sistematika sebagai berikut :
BAB I PENDAHULUAN
Bab ini membahas tentang uraian mengenai latar belakang masalah, perumusan
masalah, pembatasan masalah, tujuan, kontribusi, serta sistematika penulisan dalam
penyusunan laporan kerja praktek.
STIKOM
3
BAB II GAMBARAN UMUM STIKOM SURABAYA
Bab ini berisi sejarah dan perkembangan, lokasi, jenis usaha, visi, misi dan
komitmen STIKOM Surabaya sebagai tempat kerja praktek.
BAB III LANDASAN TEORI
Bab ini membahas tentang toeri penunjang yang digunakan sebagai acuan
dalam kerja praktek tersebut.
BAB IV METODE KERJA PRAKTEK
Bab ini membahas tentang jenis metode yang digunakan dalam pelaksanaan
kerja praktek sampai pada tahap penyusunan laporan.
BAB V HASIL DAN PEMBAHASAN
Bab ini membahas tentang proses uji coba dari perangkat yang telah dikerjakan.
BAB VI PENUTUP
Bab ini merupakan bagian terakhir dari laporan kerja praktek yang membahas
tentang kesimpulan dari keseluruhan hasil dari kerja praktek serta saran disesuaikan
dengan hasil dan pembahasan pada bab-bab yang sebelumnya.
STIKOM
4 2.1 Sejarah dan perkembangan
Di tengah kesibukan derap Pembangunan Nasional, kedudukan informasi semakin penting. Hasil suatu pembangunan sangat ditentukan oleh materi
informasi yang dimiliki oleh suatu negara. Kemajuan yang dicitakan oleh suatu pembangunan akan lebih mudah dicapai dengan kelengkapan informasi. Cepat atau lambatnya laju pembangunan ditentukan pula oleh kecepatan memperoleh
informasi dan kecepatan menginformasikan kembali kepada yang berwenang. Kemajuan teknologi telah memberikan jawaban akan kebutuhan informasi, komputer yang semakin canggih memungkinkan untuk memperoleh
informasi secara cepat, tepat dan akurat.
Hasil informasi canggih ini telah mulai menyentuh kehidupan kita. Penggunaan dan pemanfaatan komputer secara optimal dapat memacu laju pembangunan. Kesadaran tentang hal inilah yang menuntut pengadaan
tenaga-tenaga ahli yang terampil untuk mengelola informasi, dan pendidikan adalah salah satu cara yang harus ditempuh untuk memenuhi kebutuhan tenaga tersebut.
Atas dasar pemikiran inilah, maka untuk pertama kalinya di wilayah Jawa Timur dibuka Pendidikan Tinggi Komputer, Akademi Komputer & Informatika Surabaya (AKIS) pada tanggal 30 April 1983 oleh Yayasan Putra
STIKOM
5
Bhakti berdasarkan SK Yayasan Putra Bhakti No. 01/KPT/PB/III/1983. Tokoh pendirinya pada saat itu adalah :
1. Laksda. TNI (Purn) Mardiono 2. Ir. Andrian A. T
3. Ir. Handoko Anindyo
4. Dra. Suzana Surojo 5. Dra. Rosy Merianti, Ak
Kemudian berdasarkan rapat BKLPTS tanggal 2-3 Maret 1984
kepanjangan AKIS dirubah menjadi Akademi Manajemen Informatika & Komputer Surabaya yang bertempat di jalan Ketintang Baru XIV/2. Tanggal 10 Maret 1984 memperoleh Ijin Operasional penyelenggaraan program Diploma III Manajemen Informatika dengan surat keputusan nomor: 061/Q/1984 dari
Direktorat Jendral Pendidikan Tinggi (Dikti) melalui Koordinator Kopertis Wilayah VII. Kemudian pada tanggal 19 Juni 1984 AKIS memperoleh status TERDAFTAR berdasar surat keputusan Direktorat Jendral Pendidikan Tinggi
(Dikti) nomor: 0274/O/1984 dan kepanjangan AKIS berubah lagi menjadi Akademi Manajemen Informatika & Teknik Komputer Surabaya. Berdasar SK Dirjen DIKTI nomor: 45/DIKTI/KEP/1992, status DIII Manajemen Informatika
dapat ditingkatkan menjadi DIAKUI.
Waktu berlalu terus, kebutuhan akan informasi juga terus meningkat. Untuk menjawab kebutuhan tersebut AKIS ditingkatkan menjadi Sekolah Tinggi dengan membuka program studi Strata 1 dan Diploma III jurusan Manajemen
Informatika. Dan pada tanggal 20 Maret 1986 nama AKIS berubah menjadi
STIKOM
STIKOM SURABAYA , singkatan dari Sekolah Tinggi Manajemen Informatika & Teknik Komputer Surabaya berdasarkan SK Yayasan Putra Bhakti nomor:
07/KPT/PB/03/86 yang selanjutnya memperoleh STATUS TERDAFTAR pada tanggal 25 Nopember 1986 berdasarkan Keputusan Mendikbud nomor: 0824/O/1986 dengan menyelenggarakan pendidikan S1 dan D III Manajemen
Informatika. Di samping itu STIKOM SURABAYA juga melakukan pembangunan gedung Kampus baru di jalan Kutisari 66 yang saat ini menjadi Kampus II STIKOM SURABAYA . Peresmian gedung tersebut dilakukan pada
tanggal 11 Desember 1987 oleh Bapak Wahono Gubernur Jawa Timur pada saat itu. Secara berturutan perkembangan dapat dijelaskan sebagai berikut :
19 Juni 1984
AKIS membuka program DIII dengan status TERDAFTAR.
30 Maret 1986
AKIS ditingkatkan menjadi Sekolah Tinggi Manajemen Informatika & Teknik Komputer Surabaya (STIKOM SURABAYA )
25 Nopember 1986
STIKOM SURABAYA mendapatkan status TERDAFTAR untuk program S1 dan DIII Manajemen Informatika.
11 Desember 1987
Peresmian Gedung STIKOM SURABAYA Jl. Kutisari 66 Surabaya oleh Bapak Wahono Gubenur Jawa Timur saat itu. Membuka bidang studi DI Program Studi Komputer Akuntansi.
STIKOM
7
1 9 9 0
Membuka bidang studi DI Program Studi Komputer Keuangan / Perbankan
1 Januari 1992
Membuka Program S1 jurusan Teknik Komputer dengan status TERDAFTAR 19 Maret 1992
DIII Manajemen Informatika memperoleh status DIAKUI. 21 Januari 1993
Program S1 Manajemen Informatika memperoleh status DIAKUI.
1 November 1994
Membuka program DI program studi Komputer Grafik Multimedia 31 Januari 1995
STIKOM SURABAYA memperoleh kenaikan status DISAMAKAN untuk
Program S1 dan DIII Manajemen Informatika 28 Oktober 1997
Pemancangan tiang pertama gedung baru STIKOM SURABAYA Cybercampus
di Jl. Raya Kedungbaruk Surabaya. 12 Mei 1998
STIKOM SURABAYA membuka tiga program pendidikan baru sekaligus,
yaitu :
DIII bidang studi Sekretari Berbasis Komputer DII bidang studi Komputer Grafik Multimedia
DI bidang studi Jaringan Komputer 30 Juni 1998
STIKOM
STIKOM SURABAYA menerima Status DISAMAKAN untuk :
Program DII bidang studi Grafik Multimedia
Program DI semua bidang studi ( Komputer Akuntansi, Jaringan Komputer, Komputer Grafik Multimedia).
Desember 1998
Memperoleh status TERAKREDITASI dari Badan Akreditasi Nasional, untuk Program Pendidikan S1 Jurusan Manajemen Informatika.
Maret 1999
Perpindahan ke Kampus baru, Jl. Raya Kedung Baruk 98, dari Kampus STIKOM SURABAYA SIER Jl. Rungkut Industri I / 1 Surabaya.
Juni 1999
Pemisahan program studi DI Grafik Multimedia menjadi program studi.
DI Grafik dan program studi DI Multimedia, serta perubahan program studi DII Grafik Multimedia menjadi program studi DII Multimedia.
Agustus 2000
Memperoleh status TERAKREDITASI dari Badan Akreditasi Nasional, untuk Program Pendidikan S1 Jurusan Teknik Komputer.
Mei 2002
Memperoleh status TERAKREDITASI dari Badan Akreditasi Nasional, untuk Program Pendidikan DIII Jurusan Manajemen Informatika.
Juli 2003
Membuka bidang studi DIII Program Studi Komputer Percetakan & Kemasan.
13 Agustus 2003
STIKOM
9
Program Studi Strata 1 Teknik Komputer berubah nama menjadi Program Studi Strata 1 Sistem Komputer berdasar surat dari Dikti tentang Perpanjangan
Ijin Penyelenggaraan nomor: 1904/D/T/2003. 2 September 2003
Membuka bidang studi DIII Program Studi Komputer Percetakan & Kemasan.
4 Juni 2004
STIKOM SURABAYA memperoleh status “TERAKREDITASI (B)” untuk Jurnal Ilmiah GEMATIKA (Jurnal Manajemen Informatika) dan
“TERAKREDITASI (C) ” untuk Jurnal Ilmiah GEMATEK (Jurnal Teknik Komputer).
3 Maret 2005
Program Studi Diploma III Komputer Akuntansi memperoleh ijin perpanjangan
berdasar surat dari Dikti tentang Ijin Penyelenggaraan nomor: 644/D/T/2005. 10 Mei 2005
Program Studi DIII Komputer Multimedia memperoleh Perpanjangan Ijin
Penyelenggaraan berdasar surat dari Dikti nomor: 1402/D/T/2005. 3 Juni 2005
Program Studi Strata 1 Sistem Informasi memperoleh status
“TERAKREDITASI” (SK BAN-PT nomor: 012/BAN-PT/Ak-IX/S1/VII/2005 dengan nilai 333 (B)).
27 Desember 2005
STIKOM
Program Studi Strata 1 Sistem Komputer memperoleh status “TERAKREDITASI” (SK BAN-PT nomor: 024/BAN-PT/Ak-IX/S1/XII/2005
dengan nilai 330 (B)). 16 Januari 2006
Program Studi Diploma III Komputer Sekretari & Perkantoran Modern
berubah nama menjadi Program Diploma III Komputerisasi Perkantoran dan Kesekretariatan berdasar surat dari Dikti tentang Ijin Penyelenggaraan nomor: 75/D/T/2006.
STIKOM
11
2.3 Jenis Usaha
Adapun kegiatan usaha STIKOM Surabaya adalah menyelenggarakan jasa pendidikan Perguruan Tinggi. Dalam operasional STIKOM Surabaya dibagi
menjadi beberapa departemen, dimana dari masing-masing departemen akan bertanggungjawab terhadap spesifikasi pekerjaan tertentu. Departmen tersebut meliputi :
PSDM (Pengembangan Sumber Daya Manusia) BAAK (Bagian Administrasi dan Akademik) AU (Administrasi Umum)
Prodi (Program Studi) PA (Penelitian Akademik) PM (Pengabdian Masyarakat) Labkom (Laboratorium Komputer)
PPTI (Pengembangan dan Penerapan Teknologi Informasi) Perpustakaan
Kemahasiswaan
Research Center Kendali Mutu
2.4 Visi, Misi dan Komitmen STIKOM Surabaya 2.4.1 Visi STIKOM Surabaya
Tercapainya kepeloporan karena keunggulan manusia pada peringkat benchmark yang pada tahun 2018 mendekati keunggulan sumber daya manusia
STIKOM
Singapura dalam upaya mendukung keunggulan studi dalam arti luas tentang Teknologi Informasi (TI) untuk menjamin kesejahteraan manusia yang pluralism
danmultikulturalisme.
2.4.2 Misi STIKOM Surabaya
1. Meningkatkan strata pendidikan secara terus-menerus untuk semua lapisan
pada bauran kompetensi: bukan hanya pada kognisi dan pada psikomotor keahlian, tapi terutama pada kompetensi sikap mental untuk semua
manusianya yang ada di STIKOM SURABAYA agar semakin produktif dan inspiratif, dengan hidup hanya melayani dan melayani.
2. Mengembangkancorporate governance yang sehat dan produktif secara sistematik tapi bersifatemerging, demi terciptanya habitat organisasi yang socio-cultural economic sekaligus inovatif.
3. Melakukan integrasi mulai dari perolehanintake mahasiswa walaupun pada standar biasa, tetapi akan selalu dijaga dan diproses tidak hanya pada tingkat maksimum tetapi terutama optimum, sampai dengan suatu hasil outcome
yang luar biasa pada hardskill dan terutama pada softskill-nya, demi perkembangan masyarakat, negara dan bangsa.
4. Meningkatkan produktivitas dengan mengoptimalisasi pengelolaan sumber daya, terutama sekali sumber daya manusianya dan sumber daya keuangan
berdasarkan pada kegiatan yang relevan dan sesuai dengan harkat manusia. 5. Meningkatkan kesejahteraan untuk semua manusianya berdasarkan
keseimbangan pada keadilan dan prestasi kontribusi organisasional setiap
STIKOM
13
anggota organisasi di STIKOM SURABAYA ini secara merata dan menyeluruh.
6. Melakukan perluasan pengabdian masyarakat, berbasis pada pengembangan ilmu dan teknologi yang dikuasai, untuk peningkatan kesejahteraan semua manusia, khususnya dengan peduli pada kaum miskin.
7. Melakukan peningkatan dan penajaman serta perluasan semangat penelitian, bukan demi ilmu dan teknologi itu sendiri, tapi untuk menguak kebenaran realitas kehidupan agar kehidupan manusianya lebih manusiawi dan
manusianya berguna bagi seluruh umat manusia.
8. Berjejaring secara proaktif dan sehat denganstakeholders untuk konsolidasi dan adaptasi organisasi dalam rangka perkembangan dan pertumbuhan organisasi.
2.4.2 Komitmen STIKOM Surabaya
Dengan saling bergandengan tangan baik ke dalam maupun ke luar,
semoga visi dan misi ini tidak hanya dipahami, tetapi juga dihayati dan lebih daripada itu dilaksanakan secara konsisten dan semakin meningkat oleh setiap individu yang berada di STIKOM SURABAYA untuk menghidupi (bukan
mencari kehidupan dari) STIKOM SURABAYA yang kita banggakan dan akan terus kita cintai dengan semangat hanya melayani dan melayani.
STIKOM
STIKOM
13 BAB III
TEORI PENUNJANG
3.1 Mikrokontroler ATmega8535
Mikrokontroler adalah IC (Integrated Circuit) yang dapat di program dan
dihapus berulang kali dengan menggunakan software tertentu. IC ini biasanya
digunakan untuk pengontrolan robot manual atau otomatis pada perangkat
elektronika.
Beberapa tahun terakhir, mikrokontroler sangat banyak digunakan
terutama dalam pengontrolan robot. Seiring perkembangan elektronika,
mikrokontroler dibuat semakin kompak dengan bahasa pemrograman yang juga
ikut berubah. Salah satunya adalah mikrokontroler AVR (Alf and Vegard’s Risc
processor) ATmega8535 yang menggunakan teknologi RISC (Reduce Instruction
Set Computing) dimana program berjalan lebih cepat karena hanya membutuhkan
satusiklus clock untuk mengeksekusi satu instruksi program. Secara umum, AVR
dapat dikelompokkan menjadi 4 kelas, yaitu kelas ATtiny, keluarga AT90Sxx,
keluarga ATmega, dan AT86RFxx. Pada dasarnya yang membedakan
masing-masing kelas adalah memori, peripheral, dan fungsinya. Dari segi
arsitektur dan instruksi yang digunakan, mereka bisa dikatakan hampir sama.
Mikrokontroler AVR ATmega8535 memiliki fitur yang cukup lengkap.
Mikrokontroler AVR ATmega8535 telah dilengkapi dengan ADC (Analog to
Digital Converter) internal, EEPROM (Electronically Erasable Programmable
Read Only Memory) internal, Timer/Counter, PWM (Pulse with Modulation),
STIKOM
analog comparator. Sehingga dengan fasilitas yang lengkap ini memungkinkan
kita belajar mikrokontroler keluarga AVR dengan lebih mudah dan efisien, serta
dapat mengembangkan kreativitas penggunaan mikrokontroler ATmega8535.
Fitur-fitur yang dimiliki oleh mikrokontroler ATmega8535 adalah
sebagai berikut:
1. Saluran I/O sebanyak 32 buah, yaitu port A, port B, port C, dan port D.
2. ADCinternal sebanyak 8 saluran.
3. Tiga buah Timer/Counter dengan kemampuan pembandingan.
4. CPU (Central Processing Unit) yang terdiri atas 32 buah register.
5. SRAM (Static Random Acces Memory)sebesar 512 Bytes.
6. MemoriFlash sebesar 8 kB.
7. Port antarmuka SPI (Serial Peripheral interface)
8. EEPROM sebesar 512 Bytes yang dapat diprogram saat operasi.
9. Antarmuka komparator analog.
10. Port USART (Universal Syncrhronous and Asyncrhronous Serial Receiver and Transmitter) untuk komunikasi serial.
11. Sistem mikroprosesor 8 bit berbasis RISC dengan kecepatan maksimal 16
MHz.
3.1.1 Konstruksi ATmega8535
Di dalam mikrokontroler ATmega8535 terdapat 3 jenis memori, yaitu
memori program, memori data dan memori EEPROM. Ketiganya memiliki ruang
tersendiri dan terpisah.
STIKOM
15
a. Memori program ATmega8535 memiliki kapasitas memori progam sebesar 8
kBytes yang terpetakan dari alamat 0000h – 0FFFh dimana masing-masing
alamat memiliki lebar data 16 bit. Memori program ini terbagi menjadi 2
bagian yaitu bagian programbootdan bagian program aplikasi.
b. Memori data ATmega8535 memiliki kapasitas memori data sebesar 608 Bytes
yang terbagi menjadi 3 bagian yaitu register serbaguna, register I/O dan
SRAM. ATmega8535 memiliki 32 Bytes register serba guna, 64 Bytes register
I/O yang dapat diakses sebagai bagian dari memori RAM (Random Acces
Memory) atau dapat juga diakses sebagai I/O (menggunakan instruksi in atau
out), dan 512 Bytes digunakan untuk memori data SRAM.
c. Memori EEPROM ATmega8535 memiliki memori EEPROM sebesar 512
bytes yang terpisah dari memori program maupun memori data. Memori
EEPROM ini hanya dapat diakses dengan menggunakan register-register I/O
yaitu register EEPROM Address, register EEPROM Data, dan register
EEPROM Control. Untuk mengakses memori EEPROM ini diperlakukan
seperti mengakses data eksternal, sehingga waktu eksekusinya relatif lebih
lama bila dibandingkan dengan mengakses data dari SRAM.
ATmega8535 merupakan tipe AVR yang telah dilengkapi dengan 8
saluran ADC internal dengan fidelitas 10 bit. Dalam mode operasinya, ADC
ATmega8535 dapat dikonfigurasi, baik secara single ended input maupun
differential input. Selain itu, ADC ATmega8535 memiliki konfigurasi pewaktuan,
tegangan referensi, mode operasi, dan kemampuan filter derau yang amat
STIKOM
fleksibel, sehingga dengan mudah disesuaikan dengan kebutuhan ADC itu sendiri.
ATmega8535 memiliki 3 modul timer yang terdiri dari 2 buah
timer/counter 8 bit dan 1 buah timer/counter 16 bit. Ketiga modul timer/counter
ini dapat diatur dalam mode yang berbeda secara individu dan tidak saling
mempengaruhi satu sama lain. Selain itu, semua timer/counter juga dapat
difungsikan sebagai sumber interupsi. Masing-masingtimer/counter ini memiliki
register tertentu yang digunakan untuk mengatur mode dan cara kerjanya.
SPI merupakan salah satu mode komunikasi serial syncrhronous
kecepatan tinggi yang dimiliki oleh ATmega8535. USART juga merupakan salah
satu mode komunikasi serial yang dimiliki oleh ATmega8535. USART
merupakan komunikasi yang memiliki fleksibilitas tinggi, yang dapat digunakan
untuk melakukan transfer data baik antar mikrokontroler maupun dengan
modul-modul eksternal termasuk PC (Personal Computer) yang memiliki fitur
UART (Universal Asynchronus Receiver Transmitter).
USART memungkinkan transmisi data baik secarasyncrhronousmaupun
asyncrhronous, sehingga dengan memiliki USART pasti kompatibel dengan
UART. Pada ATmega8535, secara umum pengaturan modesyncrhronousmaupun
asyncrhronous adalah sama. Perbedaannya hanyalah terletak pada sumber clock
saja.
Jika pada mode asyncrhronous masing-masing peripheral memiliki
sumber clock sendiri, maka pada mode syncrhronous hanya ada satu sumber
clock yang digunakan secara bersama-sama. Dengan demikian, secara hardware
STIKOM
17
untuk mode asyncrhronous hanya membutuhkan 2 pin yaitu TXD dan RXD,
sedangkan untuk modesyncrhronousharus 3 pin yaitu TXD, RXD dan XCK.
STIKOM
3.1.2 Pin-pin pada Mikrokontroler ATmega8535
Sumber : etekno.blogspot.com
Gambar 3.1 Konfigurasipin ATmega8535
Konfigurasi pin ATmega8535 dengan kemasan 40 pin DIP (Dual Inline
Package) dapat dilihat pada gambar 3.1. Dari gambar di atas dapat dijelaskan
fungsi dari masing-masingpin Atmega8535 sebagai berikut:
1. VCC merupakanpin yang berfungsi sebagai masukan catu daya.
2. GND merukanpin Ground.
3. Port A (PortA0…PortA7) merupakan pin input/output dua arah dan pin masukan ADC.
4. Port B (PortB0…PortB7) merupakan pin input/output dua arah dan dan pin
fungsi khusus, seperti dapat dilihat pada tabel 3.1.
STIKOM
19
Tabel 3.1 Fungsi Khusus Port B
Pin Fungsi Khusus
PB7 SCK (SPIBus Serial Clock)
PB6 MISO (SPIBus Master Input/ Slave Output)
PB5 MOSI (SPIBus Master Output/ Slave Input) PB4 SS (SPISlave Select Input) PB3 AIN1 (Analog Comparator
Negative Input)
OC0 (Timer/Counter0 Output Compare Match Output) PB2 AIN0 (Analog Comparator
Positive Input)
INT2 (External Interrupt 2 Input)
PB1 T1 (Timer/ Counter1 External Counter Input)
PB0 T0 T1 (Timer/Counter External Counter Input) XCK (USARTExternal Clock Input/Output)
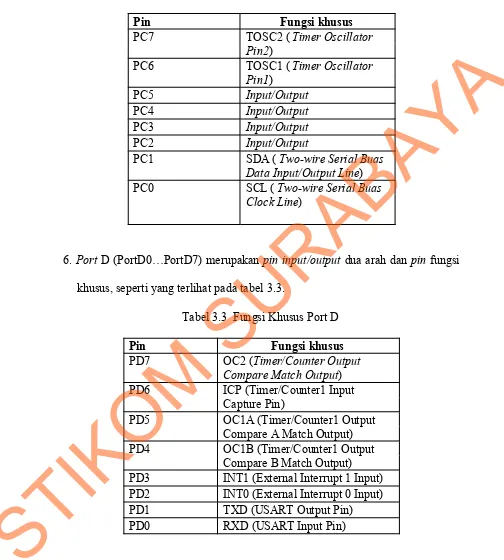
5. PortC (PortC0…PortC7) merupakan pin input/outputdua arah dan pin fungsi
khusus, seperti dapat dilihat pada tabel 3.2.
STIKOM
Tabel 3.2 Fungsi Khusus Port C
Pin Fungsi khusus
PC7 TOSC2 (Timer Oscillator
Pin2)
PC6 TOSC1 (Timer Oscillator
Pin1)
PC5 Input/Output
PC4 Input/Output
PC3 Input/Output
PC2 Input/Output
PC1 SDA (Two-wire Serial Buas Data Input/Output Line) PC0 SCL (Two-wire Serial Buas
Clock Line)
6. PortD (PortD0…PortD7) merupakan pin input/outputdua arah dan pin fungsi
khusus, seperti yang terlihat pada tabel 3.3.
Tabel 3.3 Fungsi Khusus Port D
Pin Fungsi khusus
PD7 OC2 (Timer/Counter Output Compare Match Output) PD6 ICP (Timer/Counter1 Input
Capture Pin)
PD5 OC1A (Timer/Counter1 Output Compare A Match Output) PD4 OC1B (Timer/Counter1 Output
Compare B Match Output) PD3 INT1 (External Interrupt 1 Input) PD2 INT0 (External Interrupt 0 Input)
PD1 TXD (USART Output Pin)
PD0 RXD (USART Input Pin)
7. RESET merupakanpin yang digunakan untuk me-resetmikrokontroler.
8. XTAL1 dan XTAL2 merupakanpin masukanclockeksternal.
STIKOM
21
9. AVCC merupakanpin masukan tegangan untuk ADC.
10. AREFF merupakanpin masukan tegangan referensi ADC.
3.2 Driver Relay
Relay adalah suatu peranti yang menggunakan elektromagnet untuk
mengoperasikan seperangkat kontak saklar. Susunan paling sederhana terdiri dari
kumparan kawat penghantar yang dililit pada inti besi. Bila kumparan ini
dienergikan, medan magnet yang terbentuk menarik armatur berporos yang
digunakan sebagai pengungkit mekanisme saklar.
3.2.1 Prinsip Kerja Relay
Relay pada dasarnya sama dengan prinsip kerja pada saklar, namun pada
relay saklar dijalankan secara otomatis dengan memberikan catu daya pada coil
sebagai tegangan sistem pada relay. Ketika coil mendapat energi listrik, maka
akan timbul gaya elektromagnetik yang akan menarik armatur yang berpegas yang
juga akan menutup kontak yang terhubung padaoutput.
Relay memiliki tiga jenis kutub yaitu common (kutub acuan), normally
close (kutub yang dalam keadaan awal terhubung pada common), dan normally
Open (kutub yang pada awalnya terbuka dan akan terhubung dengancommon saat
kumparan relay diberi arus listrik).
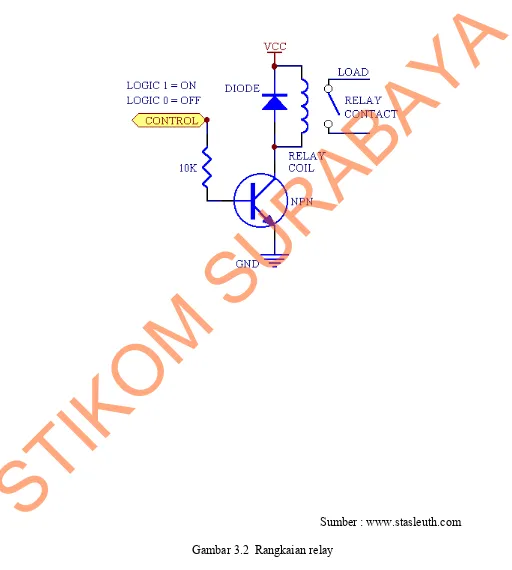
Dalam kerja praktek ini relay digunakan sebagai motor driver untuk
menggerakkan motor DC yang ada pada badan robot. Agar relay dapat bekerja
STIKOM
dengan tegangan logika dari mikrokontroler maka diperlukan komponen yang
yang dapat membantu hal tersebut.
[image:32.595.49.561.160.730.2]Sumber : www.stasleuth.com
Gambar 3.2 Rangkaian relay
STIKOM
23
3.3 Motor DC
Motor DC (Direct Current) adalah peralatan elektromagnetik dasar yang
berfungsi untuk mengubah tenaga listrik menjadi tenaga mekanik yang desain
awalnya diperkenalkan oleh Michael Faraday. Motor DC dikendalikan dengan
menentukan arah dan kecepatan putarnya. Arah putaran motor DC adalah searah
dengan arah putaran jarum jam (Clock Wise/CW) atau berlawanan arah dengan
arah putaran jarum jam (Counter Clock Wise/CCW), yang bergantung dari
hubungan kutub yang diberikan pada motor DC. Kecepatan putar motor DC diatur
dengan besarnya arus yang diberikan.
Sumber : Innovative Electronics.com
Gambar 3.3 Sebuah motor DC
1..4 Sensor
STIKOM
Sensor adalah jenis tranduser yang digunakan untuk mengubah variasi
mekanis magnetis, panas, sinar dan kimia menjadi tegangan dan arus listrik ( tim
fakultas teknik UNY, 2003 ).
1..4.1Rotary Encoder
Rotary encoder adalah peralatan elektromekanik yang dapat memonitor
gerakan dan posisi. Rotary encoder umumnya menggunakan sensor optik untuk
menghasilkan serial pulse yang dapat diartikan menjadi gerakan, posisi, dan arah.
Sehingga posisi sudut suatu poros benda berputar dapat diolah menjadi informasi
berupa kode digital olehrotary encoder untuk diteruskan oleh rangkaian kendali.
Rotary encoder umumnya digunakan pada pengendalian robot, motordriver, dsb.
Rotary encoder tersusun dari suatu piringan tipis yang memiliki
lubang-lubang pada bagian lingkaran piringan. LED ditempatkan pada salah satu
sisi piringan sehingga cahaya akan menuju ke piringan. Di sisi yang lain suatu
photo-transistor diletakkan sehinggaphoto-transistor ini dapat mendeteksi cahaya
dari LED yang berseberangan. Piringan tipis tadi dikopel dengan poros motor,
atau divais berputar lainnya yang ingin kita ketahui posisinya, sehingga ketika
motor berputar piringan juga akan ikut berputar. Apabila posisi piringan
mengakibatkan cahaya dari LED dapat mencapai photo-transistor melalui
lubang-lubang yang ada, makaphoto-transistor akan mengalami saturasi dan akan
menghasilkan suatu pulsa gelombang persegi. Semakin banyak deretan pulsa yang
dihasilkan pada satu putaran menentukan akurasi rotary encoder tersebut,
akibatnya semakin banyak jumlah lubang yang dapat dibuat pada piringan
STIKOM
25
menentukan akurasi rotary encoder tersebut. Adapun bentuk rotary encoder
ditunjukkan pada gambar 3.4.
Sumber : www.esuppliersindia.com
Gambar 3.4 Rotary encoder
1..4.2Photodioda
Photodioda adalah sensor yang digunakan sebagai penangkap
gelombang cahaya yang dipancarkan oleh Infrared. Besarnya tegangan atau arus
listrik yang dihasilkan oleh photodioda tergantung besar kecilnya radiasi yang
[image:35.595.56.553.136.644.2]dipancarkan oleh infrared. Adapun rangkaian sensorphotodioda ditunjukkan pada
gambar 3.5.
STIKOM
Sumber : www.mcafif.wordpress.com
Gambar 3.5 Rangkaianphotodioda
1..4.3Limit switch
Limit switch terdapat 3 kaki yaitucommon, normaly open dan normaly
close. common dan normaly close saling terhubung tetapi jika ditekan common
dan normaly open yang terhubung. Adapun bentuk limit switch ditujukan pada
gambar 3.6.
STIKOM
27
Sumber : www.egr.msu.edu
Gambar 3.6 Limit switch
1..5
STIKOM
ICDecoder 74LS138
IC Decoder74LS138 merupakan ICdecoder yang terdiri dari 6 input dan
8 output dan IC ini dirancang untuk kecepatan tinggi seperti memoridecoder dan
sistem transmisi data. Dalam IC ini memiliki 3 input select dan 3 input enable.
IC 74LS138 mempunyai kaki yang terdiri dari :
Kaki 1,2,3 : merupakan kakiinput select A,B,C
Kaki 4,5,6 : merupakan kakiinput enable G1,G2,G3 atau G1,dan G2note1
Kaki 8 : merupakan GND
Kaki 7,8,9,10,11,12, 13,14,15 : merupakanoutput
Kaki 16 : merupakan VCC.
Sumber : www.goldmine-elec-products.com
Gambar 3.7 ICDecoder 74LS138
STIKOM
29
Sumber : www.armory.com
Gambar 3.8 Gerbang Logika ICDecoder 74LS138
1..5.1Prinsip Kerja ICDecoder 74LS138
Cara kerja dari IC Decoder74LS138 sesuai dengan tabel kebenaran dari
IC tersebut. Adapun Tabel Kebenaran ditunjukkan pada tabel 3.4.
Tabel 3.4 Tabel Kebenaran IC Decoder74LS138
STIKOM
Sumber : 4.bp.blogspot.com
STIKOM
27 BAB IV
METODE KERJA PRAKTEK
Metode yang digunakan dalam pengerjaan kerja praktek ini adalah
sebagai berikut :
1. Wawancara, yaitu bertanya secara langsung kepada asisten laboratorium
mikrokontroler untuk mendapatkan data-data serta informasi yang
berhubungan dengan kerja praktek.
2. Studi literatur, yaitu dengan mempelajari dan membaca buku, maupun
literatur lainnya yang berkaitan dengan objek kerja praktek termasuk
permasalahan yang dihadapi.
2.1 Desain Mekanik 4.1.1 Bentuk Robot
Adapun bentuk desain robot yang dibuat dalam kerja praktek ini
ditunjukkan pada gambar 4.1.
STIKOM
Gambar 4.1 Desain robot
4.1.2 Ukuran Robot
Adapun ukuran robot yang dibuat dalam kerja praktek ini adalah
Panjangbase plan adalah 50 cm Lebarbase plan adalah 40 cm
Panjang lengan adalah 95 cm Lebar lengan adalah 50 cm Tinggi tiang adalah 86 cm
Lebih jelasnya tentang ukuran robot dapat ditunjukkan pada gambar 4.2, 4.3 dan
4.4.
STIKOM
29
Gambar 4.2 Ukuran robot tampak bawah
STIKOM
Gambar 4.3 Ukuran robot tampak depan
STIKOM
31
Gambar 4.4 Ukuran robot tampak samping
4.1.3 Bahan-Bahan Pembuatan Robot
Adapun bahan-bahan yang digunakan dalam pembuatan robot dalam
kerja praktek ini adalah :
Aluminium batang Aluminium plat L Ripet
Baut ukuran ¼ dan ½ Motor DC
STIKOM
Rantai foto copy
Gear rantai Vanbelt Gear Vanbelt Bor duduk
Bor tangan Gerinda Mata gerinda
Mata bor Tang Ripet Ragum/Penjepit
2..2Desain Perangkat Keras 2..2.1 Diagram Blok
Gambar 4.5 Diagram blok robot
STIKOM
33
Pada gambar 4.5 menjelaskan tentang keseluruhan sistem yang ada pada
robot sehingga robot dapat bergerak. Adapun penjelasan dari fungsi
masing–masing blok sebagai berikut :
Photodioda digunakan untuk membaca garis hijau dan putih dan selanjutnya mengirim datahigh danlow ke komparator.
Komparator sebagai filter dari tegangan atau penyetabil tegangan keminimum system mikrokontroler yaitu memastikan bahwa tegangan yang masuk ke
minimum system mikrokontroler berupa teganganhigh ataulow.
Rotary encoder digunakan untuk mengetahui jarak dengan mengirim sinyal high danlow keminimum system mikrokontroler.
Limith switch digunakan untuk membatasi gerakan lengan robot dengan mengirim sinyalhigh danlow keminimum systemmikrokontroler.
Minimum system mikrokontroler digunakan untuk memperoses semua
masukan yang berasal dari sensor sesuai dengan program untuk memberi
masukan keDecoder dan motor driver.
Motor driver digunakan untuk menggerakkan motor DC.
IC Decoder74LS138 digunakan untuk memilih relay yang ingin diaktifkan. Relay digunakan untuk menggerakan motor DC.
4.2.2 Perancangan minimum sistem ATmega8535
Perancangan minimum system mikrokontroler ATmega8535 merupakan
otak dari sistem yang akan kita buat, rangkaian minimum system mikrokontroler
STIKOM
ini dikemas dengan 4 buat input output dengan menggunakan konektor, yang
dapat digunakan untuk berbagai macam keperluan.
Schematic dariminimum system mikrokontroler ATmega8535 :
Pada rangkaian minimum system mikrokontroler ATmega8535 terdiri
dari komponen yang meliputi :
1. Chip ATmega8535.
2. Capasitor (100 pF) yang salah satu ujungnya dihubungkan dengan pin VCC
dan pin EA/VPP dan satu ujungnya dihubungkan ke GND.
3. Crystal (11.5092 Mhz) yang ujung kakinya dihubungkan ke pin XTAL1 dan
pin XTAL2, kemudian 2 capasitor (30 pF), capasitor 1 salah satu kaki
dihubungkan kekaki crystal yang menghubung ke XTAL1 dan satu kakinya
dihubungkan ke GND untuk capasitor 2 sama penghubungannya seperti
capasitor 1 tapi kakinya dihubungkan ke XTAL2. Untuk lebih jelas bisa
melihat pada Gambar 4.6.
STIKOM
35
Gambar 4.6 Rangkaian mikrokontroler ATmega8535
Konektor Power Supply
Pada Konektor Power Supplymenggunakan konektor yang berisi 2, kaki
satu dihubungkan ke power supply dengan tegangan 12V dan satu kakinya
dihubungkan ke GND, terdapat regulator 7805 untuk menurunkan tegangan
menjadi 5V untuk mengaktifkan tegangan logika yang ada pada minimum system
mikrokontroller ATmega8535. untuk lebih jelas bisa dilihat pada Gambar 4.7.
STIKOM
Gambar 4.7 Konektor power supply danregulator 7805
Rangkaian Reset
Pada rangkaian reset terdiri dari komponen yang meliputi :
1. Capasitor(10uF) yang kaki positif dihubungkan ke resistor dan kaki negatif
dihubungkan GND.
2. Resistor (100 Ohm) yang salah satu kakinya dihubungkan ke salah satu kaki
push bottom dan kaki satunya dihubungkan ke salah satu resistor .
3. Push Bottom yang salah satu kaki dihubungkan ke kaki resistor dan kaki
satunya dihubungkan ke RST.
4. Resistor (10 K) yang salah satu kakinya dihubungkan ke RST (reset) dan kaki
satunya dihubungkan ke VCC. Untuk lebih jelas bisa dilihat pada Gambar 4.8.
STIKOM
37
Gambar 4.8 Rangkaianreset ATMega8535
Konektor 10 Pin
Pada Konektor ini digunakan untuk input dan pada konektor ini
disambungkan pada pin PA0 sampai pin PA7,VCC dan GND. untuk lebih jelas
bisa dilihat pada Gambar 4.9.
Gambar 4.9 Konektor 10 pin yang tersambung pada pin PA
STIKOM
Konektor 6 Pin
Pada Konektor ini digunakan untuk input output dan pada konektor ini
disambungkan pada pin PD4 sampai pin PD7, 12V dan GND. untuk lebih jelas
bisa dilihat pada Gambar 4.10.
Gambar 4.10 Konektor 6 pin yang tersambung padapin PD4-PD7
Konektor Downloder
Pada Konektor ini disambungkan pada pin PB.5 sampai PB.7, RESET,
VCC dan GND. untuk lebih jelas bisa dilihat pada Gambar 4.11.
STIKOM
39
Gambar 4.11 Konektor6 pin yang tersambung pada pin PB5-PB7
Konektor 8 Pin
Pada Konektor ini digunakan untuk input outputnya dan pada konektor
ini disambungkan pada pin PC0 sampai pin PC7, untuk lebih jelas bisa dilihat
pada Gambar 4.12.
STIKOM
Gambar 4.12 Konektor 8 pin yang tersambung padapin PC
4.2.3 Perancangan ICDecoder 74LS138
Pada rangkaian IC Decoder74LS138 , kaki – kakinya terhubung sesuai
dengan tabel 4.1
Tabel 4.1 Kaki-kaki IC Decoder74LS138
Kaki Tersambung
4,5,6 Ground
6,16 VCC
7,9,10,11,12,13,14,15 Konektor 8
1,2,3 PC0,PC1,PC2
STIKOM
41
Gambar 4.13 RangkaianIC Decoder 74LS138
4.2.4 Pembuatan rangkaian PCB (Project Circuit Board)
Pada pembuatan rangkaian kita membeli komponen yang kita butuhkan
satelah itu kita pasang pada PCB. Setalah pemasangan selesai kita lanjutkan
dengan penyolderan komponen pada PCB setelah selesai penyolderan. Lakukan
pengujian apakah rangkaian tersebut sudah benar sesuai denganschematic.
4.2.5 Perancangan Motor Driver
Komponen-komponen yang terdapat di dalam motor driver adalah
1. Resistor 10K yang kaki salah satunya terhubung dengan GND dan kaki lainya
terhubung dengan 1K dan data dariminimum system mikrokontroler.
2. Resistor 1K yang kaki salah satunya terhubung dengan 10K dan data dari
minimum system mikrokontroler dan kaki lainya terhubung dengan kakibasis
TIP31.
STIKOM
3. Dioda yang kaki salah satunya terhubung dengan kaki collector TIP31 dan
kaki relay dan kaki yang lainya terhubung denganpower supply.
4. Power supply terhubung dengan kaki dioda dan kaki relay.
5. Kakiemiter TIP31 terhubung dengan GND.
Untuk lebih jelas dapat dilihat di gambar 4.14.
Gambar 4.14 Rangkaian motor driver
5.3 Desain Perangkat Lunak 4.3.1 Flowchart
STIKOM
43
Adapun flowchart yang digunakan dalam pemrograman robot
ditunjukkan pada gambar 4.15.
STIKOM
yes
no yes
no
STIKOM
45
Gambar 4.15 Flowchart program 4.3.2 Program Codevision AVR
Program Codevision AVR merupakan software yang bisa digunakan
sebagai editor dan compiler untuk mendownload program ke mikrokontroler
ATmega8535. Pada program Codevision AVR juga sudah dilengkapi dengan
modul-modul seperti modul LCD, modul serial, modul RTC yang mudah
digunakan. Sehingga jika kita membutuhkan hal tersebut bisa langsung dipanggil
tapa harus membuat modul tersebut. Langkah-langkah untuk menjalankan
Program Codevision AVR sebagai berikut:
1. Jalankan program Codevision AVR yang ada pada komputer, akan tampak
tampilan awalnya separti pada Gambar 4.16.
STIKOM
Gambar 4.16 Tampilan awal program Codevision AVR
2. Persiapan untuk membuat proyek baru, langkah-langkahnya sebagai berikut:
Pastikan tidak terdapat file atau proyek yang terbuka. Jika masih ada yang terbuka, tutup dahulu (klik menuclose, pilihclose project).
STIKOM
47
Klik menu file, kemudian pilih new sehingga akan tampil dialog box seperti pada Gambar 4.17.
Gambar 4.17 Dialog create new file
Pilih project dan kemudian klik tombol ok. Kemudian akan muncul dialog box yang memberi pilihan menggunakan wizard atau tidak seperti gambar
4.18.
STIKOM
Gambar 4.18 Dialogbox Codewizard
Pilih yes kemudian muncul dialog box codewizard AVR. Pilih chip yang
digunakan misalnya ATmega8535 seperti gambar 4.19.
STIKOM
49
Gambar 4.19 Tampilan Codewizard AVR
Buka tab Port untuk dapat mengatur I/O yang digunakan pada IC seperti gambar 4.20.
STIKOM
Gambar 4.20 Tab port I/O
Buka modul Timer digunakan untuk mengatur kecepatan clock dan PWM seperti gambar 4.21.
STIKOM
51
Gambar 4.21 ModulTimers
Buka tab Modul jika digunakan contoh modul ADC seperti gambar 4.22.
STIKOM
Gambar 4.22 ModulADC
Jika sudah pilihfile klik Generate, save and exit seperti gambar 4.23
STIKOM
53
Gambar 4.23 Tampilangenerate, save and exit
Proses penyimpanan dilakukan sebanyak 3 kali yang menghasilkan extensi c ,
prj dan cwp seperti gambar 4.24, 4.25 dan 4.26.
STIKOM
Gambar 4.24 Extensi c
STIKOM
55
Gambar 4.25 Extensi prj
STIKOM
Gambar 4.26 Extensi cwp
STIKOM
57
Setelah proses meyimpanfile selesai, mucul seperti gambar 4.27.
Gambar 4.27 Tampilan tempat penulisan program
3. Siap untuk membuat program.
STIKOM
46 5.1 Pengujian Sensor Photodioda
Pengujian dilakukan terhadap 8 sensorphotodioda.
5.1.1 Tujuan
Adapun tujuan dari pengujian sensorphotodioda adalah digunakan untuk
mendeteksi garis yang berwarna putih dan lapangan yang berwarna hijau.
5.1.2 Prosedur
Adapun prosedur pengujian sensorphotodioda ini adalah
Sensorphotodioda yang sudah jadi diberi catu daya 5 volt.
Dibawah sensor photodioda dikenakan garis berwarna putih dan garis berwarna hijau secara bergantian.
Ukur dengan AVOmeter untuk mengetahui tegangan yang keluar dari output sensorphotodioda.
Pengujian dilakukan sebanyak 1 kali.
5.1.3 Hasil
Adapun dari pengujian sensor photodioda didapatkan hasil seperti pada
tabel 5.1.
STIKOM
47
Tabel 5.1 Hasil pengujian sensorphotodioda
Sensor ke - V Putih V hijau
1 1.2 V 4.5 V
2 1.5 V 4.35 V
3 0.9 V 3.5 V
4 1.3 V 4.6 V
5 1.3 V 4.1 V
6 1.2 V 4.5 V
7 0.5 V 4.2 V
8 0.3 V 3.5 V
5.1.4 Pembahasan
Sesuai dengan hasil pengujian yang ditunjukkan pada tabel 5.1 dapat
dijelaskan bahwa sensor photodioda jika terkena garis berwarna putih maka
tegangan akan mendekati low sedangkan jika terkena garis berwarna hijau maka
tegangan akan mendekatihigh.
5.2 Pengujian SensorRotary Encoder
Pengujian dilakukan terhadap 1 sensor rotary encoder.
5.2.1 Tujuan
Adapun tujuan dari pengujian sensor rotary encoder adalah digunakan
untuk mengetahui jarak.
5.2.2 Prosedur
Adapun prosedur pengujian sensorrotary encoder ini adalah
STIKOM
Sensorrotary encoder diberi catu daya 5 volt.
Sensorrotary encoder ditempelkan di gear motor DC.
Jalankan robot dari titik satu ke titik lain dengan jarak 3 meter.
Ukur dengan alat ukur meter berapa jarak yang ditempuh oleh robot ketika berhenti.
Pengujian dilakukan sebanyak 5 kali.
5.2.3 Hasil
Adapun dari pengujian sensor rotary encoder didapatkan hasil seperti
pada tabel 5.2.
Tabel 5.2 Hasil pengujian sensorrotary encoder
Pengujian ke- Jarak 1 3.20 m 2 3.10 m
3 3 m
4 2.95 m 5 2.90 m
5.2.4 Pembahasan
Sesuai dengan hasil pengujian yang ditunjukkan pada tabel 5.2 dapat
dijelaskan bahwa kegagalan sensor rotary encoder dalam mengetahui jarak
dipengaruhi oleh beberapa faktor diantaranya :
Jalan robot yang tidak lurus, solusinya adalah dengan mengatur PWM.
Kelebihan dan kekurangan dalam memberikan jumlah counter dalam membaca pulse dari sensor rotary encoder, solusinya adalah dengan
STIKOM
49
mengurangi jika terjadi kelebihan dan menambahkan jika terjadi kekurangan.
STIKOM
5.3 Pengujian Sensor Limit Switch
Pengujian dilakukan terhadap 5 sensorlimit switch.
5.3.1 Tujuan
Adapun tujuan dari pengujian sensor limit switch adalah digunakan
untuk membatasi gerakan robot terutama lengan.
5.3.2 Prosedur
Adapun Prosedur pengujian sensorlimit switch ini adalah
Sensorlimit switch diberi catu daya 5 volt.
Sensorlimit switch ditekan dan dilepas secara bergantian.
Ukur dengan AVOmeter untuk mengetahui tegangan yang keluar dari kaki common sensorlimit switch.
Pengujian dilakukan sebanyak 1 kali.
5.3.3 Hasil
Adapun Hasil dari pengujian sensorlimit switch didapatkan hasil seperti
pada tabel 5.3.
Tabel 5.3 Hasil pengujian sensorlimit switch
Pengujian
ke - Ditekan Dilepas
1 4.95 V 0 V
2 4.95 V 0 V
3 4.95 V 0 V
4 4.95 V 0 V
5 4.95 V 0 V
STIKOM
51
5.3.4 Pembahasan
Sesuai dengan hasil pengujian yang ditunjukkan pada tabel 5.3 dapat
dijelaskan bahwa sensor limit switch jika ditekan akan berlogika high sedangkan
jika dilepas akan berlogikalow.
5.4 Pengujian Rangkaian Motor Driver
Pengujian dilakukan terhadap 1 Rangkaian motor driver.
5.4.1 Tujuan
Adapun tujuan dari pengujian rangkaian motor driver ini adalah
digunakan untuk menggerakkan motor DC dan juga dapat mengatur kecepatan
dari motor tersebut.
5.4.2 Prosedur
Adapun Prosedur pengujian rangkaian motordriver ini adalah
Rangkaian motordriver diberi catu daya 12 volt.
Pasang sebuah motor DC pada output rangkaian motor DC.
Input PWM pada rangkaian motor driver diberi catu daya 5 volt dan GND secara bergantian.
Pengujian dilakukan sebanyak 5 kali.
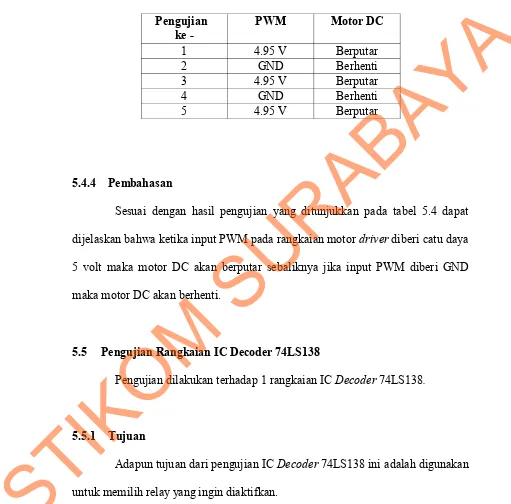
5.4.3 Hasil
STIKOM
Adapun pengujian rangkaian motor driver didapatkan hasil seperti pada
[image:78.595.41.552.156.660.2]tabel 5.4.
Tabel 5.4 Hasil pengujian rangkaian motordriver
Pengujian
ke - PWM Motor DC
1 4.95 V Berputar
2 GND Berhenti
3 4.95 V Berputar
4 GND Berhenti
5 4.95 V Berputar
5.4.4 Pembahasan
Sesuai dengan hasil pengujian yang ditunjukkan pada tabel 5.4 dapat
dijelaskan bahwa ketika input PWM pada rangkaian motor driver diberi catu daya
5 volt maka motor DC akan berputar sebaliknya jika input PWM diberi GND
maka motor DC akan berhenti.
5.5 Pengujian Rangkaian IC Decoder 74LS138
Pengujian dilakukan terhadap 1 rangkaian IC Decoder74LS138.
5.5.1 Tujuan
Adapun tujuan dari pengujian IC Decoder74LS138 ini adalah digunakan
untuk memilih relay yang ingin diaktifkan.
5.5.2 Prosedur
Adapun Prosedur pengujian rangkaian IC Decoder74LS138 ini adalah
STIKOM
53
Rangkaian IC Decoder74LS138 diberi catu daya 5 volt.
Select input dengan cara diberi tegangan 5 volt dan GND membentuk sebuah angka biner.
Ukur dengan AVOmeter berapa tegangan yang keluar dari masing-masing output IC Decoder74LS138.
Pengujian dilakukan sebanyak 5 kali.
5.5.3 Hasil
Adapun pengujian rangkaian IC Decoder 74LS138 didapatkan hasil
seperti pada tabel 5.5.
Tabel 5.5 Hasil pengujian rangkaianIC Decoder 74LS138
5.5.4 Pembahasan
Sesuai dengan hasil pengujian yang ditunjukkan pada tabel 5.5 dapat
dijelaskan bahwa output salah satu dari IC Decoder 74LS138 bernilai 0 volt
sesuai dengan tabel kebenaran dari ICDecoder itu sendiri.
STIKOM
5.6 Pengujian Rangkaian Relay
Pengujian dilakukan terhadap 1 rangkaian relay.
5.6.1 Tujuan
Adapun tujuan dari pengujian rangkaian ini adalah digunakan untuk
memilih motor DC yang ingin diaktifkan.
5.6.2 Prosedur
Adapun Prosedur pengujian rangkaian relay ini adalah
Rangkaian relay diberi catu daya 12 volt.
Input data pada rangkaian relay diberi catu daya 5 volt dan GND.
Ukur dengan AVOmeter berapa tegangan yang keluar dari kakicommon relay. Pengujian dilakukan sebanyak 5 kali.
5.6.3 Hasil
Adapun pengujian rangkaian relay didapatkan hasil seperti pada tabel
5.6.
Tabel 5.6 Hasil pengujian rangkaian relay
Pengujian
ke - Input Common (V)
1 4.95 V 0 V
2 GND 12 V
3 4.95 V 0 V
4 GND 12 V
5 4.95 V 0 V
STIKOM
55
5.6.4 Pembahasan
Sesuai dengan hasil pengujian yang ditunjukkan pada tabel 5.6 dapat
dijelaskan bahwa ketika input dari rangkaian relay diberi catu daya GND maka
relay aktif sedangkan jika diberi catu daya 5 volt maka relay tidak aktif.
STIKOM
5.7 Pengujian RangkaianMinimum System Mikrokontroler
Pengujian dilakukan terhadap 1 rangkaian minimum system
mikrokontroler.
5.7.1 Tujuan
Adapun tujuan dari pengujian rangkaian ini adalah digunakan untuk
memasukkan program dari software Codevisionavr ke IC ATmega8535.
5.7.2 Prosedur
Adapun Prosedur pengujian rangkaian minimum system mikrokontroler
ini adalah
Rangkaianminimum system mikrokontroler diberi catu daya 12 volt.
Konektordownloader dihubungkan dengan port pararel db25 pada komputer. Pilih menusettingProgrammerKanda Systems STK200+/300.
Pilih menuProject ConfigureAfter makeProgram the chip.
Pilih menuProject Make.
Pengujian dilakukan sebanyak 1 kali.
5.7.3 Hasil
Adapun pengujian rangkaianminimum systemmikrokontroler didapatkan
hasil seperti pada gambar 5.1.
STIKOM
57
Gambar 5.1 Hasil pengujianminimum system mikrokontroler
5.7.4 Pembahasan
Sesuai dengan hasil pengujian yang ditunjukkan pada gambar 5.7 dapat
dijelaskan bahwa rangkaian minimum system mikrokontroler sudah bisa diload
program.
STIKOM
56 6.1 Kesimpulan
Adapun kesimpulan dalam kerja praktek ini adalah :
Sensor photodioda dapat digunakan untuk mendeteksi garis yang berwarna putih dan berwarna hijau.
Kegagalan dari sensor rotary encoder disebabkan oleh beberapa faktor
diantaranya jalan robot yang tidak lurus dan kelebihan dan kekurangan jumlah
counter dalam membaca pulserotary encoder.
Sensor limit switch dapat digunakan untuk membatasi gerakan robot dengan
memberi tekanan pada bagian depanlimith switch.
Rangkaian motor driver bisa digunakan untuk mengatur kecepatan motor DC.
Rangkaian relay bisa digunakan untuk mengaktifkan motor DC yang ingin diputar.
IC Decoder74LS138 dapat digunakan untuk memilihoutput yang diinginkan dengan memberi inputan berupa nilai biner sesuai dengan tabel kebenaran.
Rangkaianminimum system mikrokontroler adalah rangkaian yang digunakan
supaya program bisa diload ke IC ATMega8535.
6.2 Saran
STIKOM
56
Adapun saran dari penulis adalah ketika ingin mengetahui jarak
sebaiknya counter dari sensorrotary encoder di display ke LCD sehingga jumlah
pulse darirotary encoder dapat dilihat langsung.
STIKOM
57
Alldatasheet,2011.ATMega8535.(Online).(http://www.alldatasheet.com/datasheet
pdf/pdf/164169/ATMEL/ATMEGA8535.html, diakses 20 february 2011).
Alldatasheet,2010.IC 74LS138. (Online).
(http://www.alldatasheet.com/datasheet-pdf/pdf/51039/FAIRCHILD/74LS138.htm
l, diakses 20 Januari 2010).
Wikipedia, 2011b. Rotary Encoder. (Online). (http://en.wikipedia.org /wiki/
Rotary_encoder, diakses 23 Maret 2011).
Wikipedia, 2010. relai. (Online). (http://id.wikipedia.org/wiki/Relai, diakses 23
Maret 2011).
Repository,pin Atmega 8535. (Online). (http://repository.usu.ac.id/bitstream/1234
56789/20194/4/Chapter%20II.pdf).diakses 23 Maret 20011).
Akbarulhuda, 2010. (Online).(http://akbarulhuda.wordpress.com /2010 / 03 /25/
membuat-program-mikorkontroler-menggunakan-codevisionavr/, diakses 20
Maret 2011).