Line Follower Robot
Teks penuh
Gambar

Garis besar
Dokumen terkait
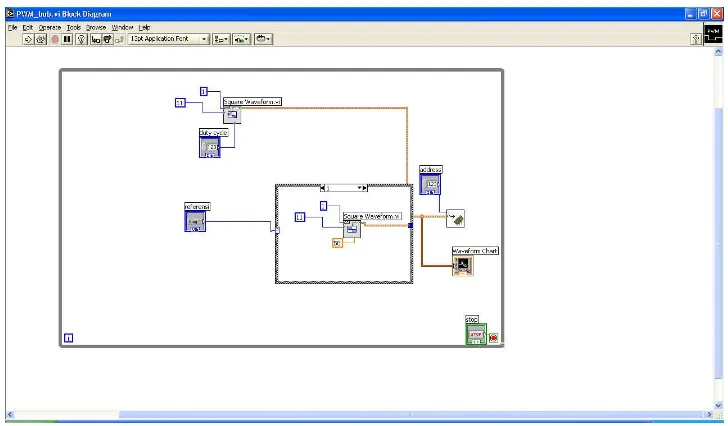
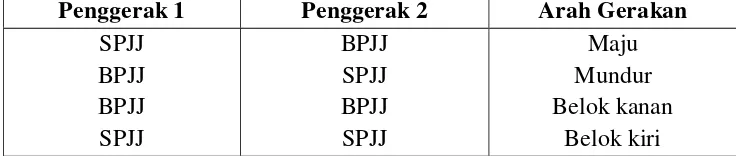
Perancangan pengendali pada software Basic Compiler ini lebih berorientasi pada pengolahan data dari pembacaan posisi sensor garis line follower robot yang
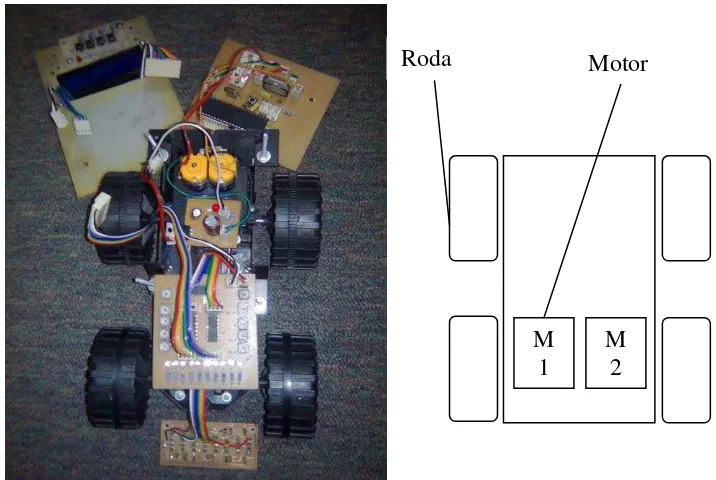
Perancangan sensor pendeteksi garis terdiri dari tujuh buah sensor yang terletak pada sisi depan robot dan pada sisi tengah robot.. Sisi depan robot terdiri dari lima
line tracer atau line follower robot yaitu dengan menggunakan sensor garis seperti infrared yang mendeteksi adanya garis pada permukaan lintasan robot, dan informasi
Robot akan berhenti saat sensor garis mendeteksi tidak adanya garis lintasan, kemudian motor katrol akan aktif kembali untuk meletakkan box berwarna merah,
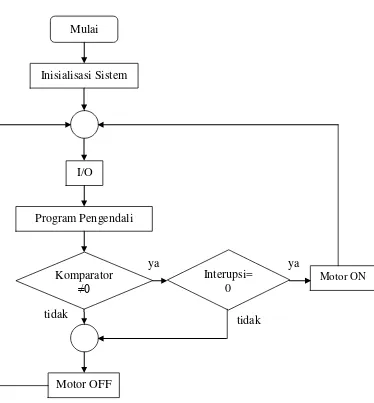
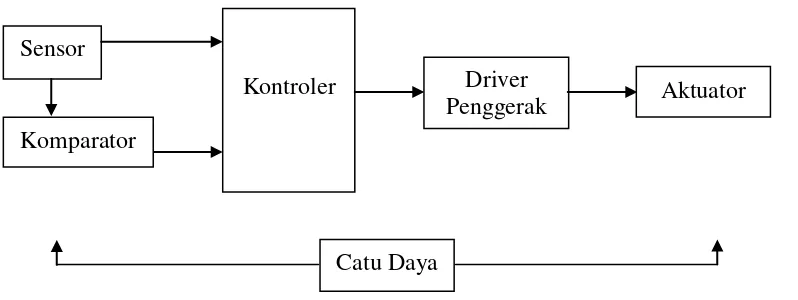
menu tombol. Gambar 3.2 Diagram Blok Sistem.. TUGAS AKHIR RANCANG BANGUN ROBOT... HENDRIK JUNAEDI Prinsip kerja sensor garis adalah transmitter memancarkan cahaya yang akan
Cara kerja dari sistem robot line follower secara umum ialah dimulai dari pembacaan lintasan atau garis oleh sensor photodiode berserta LED yang mana intensitas pantulan
diperoleh dari kontroler yang digunakan Pengujian ini dilakukan dengan menjalankan line follower robot pada suatu garis lurus, dan posisi awal robot berada pada kondisi
SENSOR WARNA POT SENSOR WARNA GARIS BRICK LEGO MINDSTORMS EV3 LCD MOTOR MEDIUM DRIVER MOTOR B DRIVER MOTOR C MOTOR C MOTOR B Gambar 2.2 Blok Diagram Robot LEGO
