Barelang Tracerino
PENGENALAN ROBOT
1.1 Pendahuluan
Robot line follower
bernavigasi mengikuti garis yang memil warna lapangan atau arena.
warna lapangan adalah hitam. Selain itu biasanya digunakan warna hitam untuk warna garis jika warna lapangan atau arena adalah putih.
merupakan jenis robot yang banyak dipertandingkan pada ajang atau kontes robot tingkat regional, nasional, maupun internasional. Robot
dilombakan karena memiliki tingkat kesulitan rendah dalam merancang ataupun memprogramnya. Tingkat
favorit untuk dipelajari da ataupun tingkat perguruan tinggi.
Pada kontes robot yang internasional, robot
mengikuti garis. Robot
misi tertentu contohnya memindahkan barang (biasanya disebut dengan robot). Ada juga robot
dari jalur labirin (biasanya disebut dengan
follower dituntut untuk menyelesaikan misi menyelamatkan sesuatu (
Tentunya untuk dapat menjalankan misi
kemampuannya untuk bernavigasi menghindari rintangan atau halangan yang ada. Sebuah robot line follower
kontroler. Aktuator merupakan alat atau benda yang dapat membuat robot bergerak. Aktuator pada robot biasanya menggunakan motor. Pada robot
follower yang bertipe
berupa motor DC. Sedangkan robot
lengan atau kaki) biasanya motor yang digunakan adalah
Sedangkan sensor merupakan "indera penglihatan" pada robot. Layaknya seorang manusia untuk dapat berjalan tanpa menabrak
BAB I
PENGENALAN ROBOT LINE FOLLOWER
line follower merupakan robot yang memiliki kemampuan untuk
bernavigasi mengikuti garis yang memiliki perbedaan warna yang
warna lapangan atau arena. Biasanya warna garis yang digunakan adalah putih jika warna lapangan adalah hitam. Selain itu biasanya digunakan warna hitam untuk warna garis jika warna lapangan atau arena adalah putih. Robot
jenis robot yang banyak dipertandingkan pada ajang atau kontes robot regional, nasional, maupun internasional. Robot line follower
dilombakan karena memiliki tingkat kesulitan rendah dalam merancang ataupun Tingkat kesulitan yang rendah membuat robot tersebut menjadi favorit untuk dipelajari dan dipertandingkan pada tingkat sekolah menengah atas ataupun tingkat perguruan tinggi.
Pada kontes robot yang rutin diadakan pada tingkat regional, nasional, , robot line follower tidak hanya dituntut untuk dapat bernavigasi
. Robot line follower juga dituntut untuk dapat menyelesaikan misi misi tertentu contohnya memindahkan barang (biasanya disebut dengan
robot line follower yang dituntut untuk menyelesaikan misi keluar dari jalur labirin (biasanya disebut dengan maze solving robot). Ada juga
dituntut untuk menyelesaikan misi menyelamatkan sesuatu ( untuk dapat menjalankan misi tersebut robot perlu
untuk bernavigasi menghindari rintangan atau halangan yang ada.
line follower memiliki 3 bagian utama yaitu aktuator, sensor, dan
kontroler. Aktuator merupakan alat atau benda yang dapat membuat robot bergerak. Aktuator pada robot biasanya menggunakan motor. Pada robot
yang bertipe mobile (menggunakan roda) aktuator yang digunakan berupa motor DC. Sedangkan robot line follower yang bertipe legged
) biasanya motor yang digunakan adalah jenis
Sedangkan sensor merupakan "indera penglihatan" pada robot. Layaknya seorang manusia untuk dapat berjalan tanpa menabrak pastinya memerlukan mata untuk
LINE FOLLOWER
merupakan robot yang memiliki kemampuan untuk iki perbedaan warna yang kontras dengan Biasanya warna garis yang digunakan adalah putih jika warna lapangan adalah hitam. Selain itu biasanya digunakan warna hitam untuk Robot line follower jenis robot yang banyak dipertandingkan pada ajang atau kontes robot
line follower banyak
dilombakan karena memiliki tingkat kesulitan rendah dalam merancang ataupun kesulitan yang rendah membuat robot tersebut menjadi ekolah menengah atas
regional, nasional, dan tidak hanya dituntut untuk dapat bernavigasi juga dituntut untuk dapat menyelesaikan misi-misi tertentu contohnya memindahkan barang (biasanya disebut dengan transporter
untuk menyelesaikan misi keluar Ada juga robot line dituntut untuk menyelesaikan misi menyelamatkan sesuatu (rescue).
tersebut robot perlu ditambah untuk bernavigasi menghindari rintangan atau halangan yang ada.
memiliki 3 bagian utama yaitu aktuator, sensor, dan kontroler. Aktuator merupakan alat atau benda yang dapat membuat robot tersebut bergerak. Aktuator pada robot biasanya menggunakan motor. Pada robot line (menggunakan roda) aktuator yang digunakan biasanya
legged (meggunakan
jenis motor servo. Sedangkan sensor merupakan "indera penglihatan" pada robot. Layaknya seorang pastinya memerlukan mata untuk
melihat. Begitu juga robot
diperlukan sensor yang dapat melihat garis. utama robot. Fungsi kontroler
digunakan untuk berfikir
program. Program tersebut merupakan perintah
robot yang dituliskan dalam beberapa baris kode yang biasa disebut dengan
sourcecode.
Barelang Tracerino dasar robot line follower
upgrade menjadi robot lain seperti robot
Barelang Tracerino didesain dengan sistem
robot). Robot Barelang Tracerino dapat diprogram menjadi robot manual. Autonomous
otomatis tanpa perintah dari manusia
yang dikendalikan secara manual oleh manusia. Barelang Tracerino didesain sebagai kit robot pembelajaran yang mudah
tentang robotika. Bahasa pemrograman yang digunakan untuk membuat program pada robot Barelang Tracerino adalah C++. Program dapat dituliskan pada Arduino IDE, perangkat lunak
mikrokontroler berbasis Arduino. dilengkapi dengan library
melihat. Begitu juga robot line follower, untuk dapat bernavigasi mengikuti garis diperlukan sensor yang dapat melihat garis. Kontroler pada robot
robot. Fungsi kontroler sama halnya dengan fungsi otak pada manusia yaitu digunakan untuk berfikir. Namun bedanya otak pada robot harus
program. Program tersebut merupakan perintah-perintah yang dapat dimengerti oleh robot yang dituliskan dalam beberapa baris kode yang biasa disebut dengan
Barelang Tracerino merupakan sebuah kit robot yang didesain
line follower. Selain sebagai robot line follower, robot
menjadi robot lain seperti robot transporter, maze solving
didesain dengan sistem pergerakan menggunakan roda ( Robot Barelang Tracerino dapat diprogram menjadi autonoumous
Autonomous robot merupakan robot yang dapat bernavigasi secara
tanpa perintah dari manusia. Sedangkan robot manual
yang dikendalikan secara manual oleh manusia. Barelang Tracerino didesain sebagai kit robot pembelajaran yang mudah dipahami bagi para pemula yang ingin belajar Bahasa pemrograman yang digunakan untuk membuat program robot Barelang Tracerino adalah C++. Program dapat dituliskan pada Arduino
perangkat lunak opensource yang dapat digunakan untuk m
mikrokontroler berbasis Arduino. Selain perangkat keras, Barelang Tracerino juga
library yang dapat memudahkan dalam pembuatan program.
untuk dapat bernavigasi mengikuti garis pada robot merupakan "otak" fungsi otak pada manusia yaitu Namun bedanya otak pada robot harus diisikan sebuah perintah yang dapat dimengerti oleh robot yang dituliskan dalam beberapa baris kode yang biasa disebut dengan
it robot yang didesain dengan fungsi robot ini juga dapat
di-maze solving, dan robot rescue.
pergerakan menggunakan roda (mobile
autonoumous robot dan
merupakan robot yang dapat bernavigasi secara manual merupakan robot yang dikendalikan secara manual oleh manusia. Barelang Tracerino didesain sebagai dipahami bagi para pemula yang ingin belajar Bahasa pemrograman yang digunakan untuk membuat program robot Barelang Tracerino adalah C++. Program dapat dituliskan pada Arduino yang dapat digunakan untuk memrogram Selain perangkat keras, Barelang Tracerino juga dapat memudahkan dalam pembuatan program.
1.2 Bagian Robot Barelang Tracerino V1 1.2.1 Aktuator
Aktuator merupakan
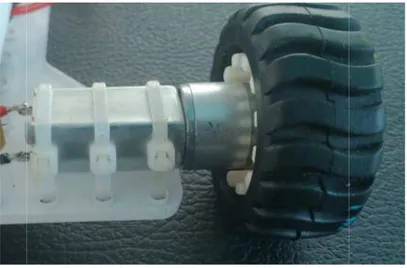
dasar memindahkan posisi robot dari suatu tempat ke tempat lain. Pada robot Barelang Tracerino, aktuator yang digunakan adalah dua buah moto dengan kecepatan 620 RPM.
sebuah roda, sehingga apabila terjadi perputaran motor roda juga berputar yang berakhibat pada bergeraknya
yang umum.
1.2.2 Sensor
Sensor merupakan perangkat yang berfungsi untuk mendeteksi kondisi lingkungan tempat robot berada. Banyak jenis sensor yang bi
di robot. Sensor
untuk mendeteksi benda, mendeteksi warna, mendeteksi api, dan lain sebagainya. Pada robot Barelang Tracerino sensor yang digunakan adalah sensor garis. Sesuai dengan namanya, sensor garis merupakan sensor yang digunakan untuk mendeteksi sebu
Bagian Robot Barelang Tracerino V1
Aktuator merupakan perangkat penggerak robot yang memiliki fungsi dasar memindahkan posisi robot dari suatu tempat ke tempat lain. Pada robot
Tracerino, aktuator yang digunakan adalah dua buah moto dengan kecepatan 620 RPM. Motor DC dihubungkan secara langsung ke sebuah roda, sehingga apabila terjadi perputaran motor roda juga berputar yang berakhibat pada bergeraknya body robot seperti halnya yang terjadi pada mobil
Gambar 2. Motor DC dan roda
Sensor merupakan perangkat yang berfungsi untuk mendeteksi kondisi lingkungan tempat robot berada. Banyak jenis sensor yang bi
di robot. Sensor-sensor tersebut juga beragam fungsinya, ada
untuk mendeteksi benda, mendeteksi warna, mendeteksi api, dan lain sebagainya. Pada robot Barelang Tracerino sensor yang digunakan adalah sensor garis. Sesuai dengan namanya, sensor garis merupakan sensor yang digunakan untuk mendeteksi sebuah garis dengan lebar dan warna tertentu.
perangkat penggerak robot yang memiliki fungsi dasar memindahkan posisi robot dari suatu tempat ke tempat lain. Pada robot Tracerino, aktuator yang digunakan adalah dua buah motor DC Motor DC dihubungkan secara langsung ke sebuah roda, sehingga apabila terjadi perputaran motor roda juga berputar yang ya yang terjadi pada mobil
Sensor merupakan perangkat yang berfungsi untuk mendeteksi kondisi lingkungan tempat robot berada. Banyak jenis sensor yang biasanya digunakan sensor tersebut juga beragam fungsinya, ada yang digunakan untuk mendeteksi benda, mendeteksi warna, mendeteksi api, dan lain sebagainya. Pada robot Barelang Tracerino sensor yang digunakan adalah sensor garis. Sesuai dengan namanya, sensor garis merupakan sensor yang
1.2.3 Kontroler
Kontroler merupakan perangkat yang penting pada robot
robot Barelang Tracerino merupakan sebuah rangkaian elektronik berbasis mikrokontroler yang berfungsi untuk mengatur fungsi ke
bagian robot.
memiliki spesifikasi sebagai berikut :
1. Berbasis mikrokontroler ATMega32 dengan kecepatan 16MIPS (Mega Instruction Per Second
2. terintegrasi secara
sebagai jalur untuk mengisi program
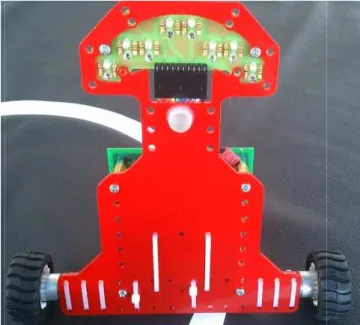
Gambar 3. Bentuk fisik sensor garis
Gambar 4. Penempatan sensor garis pada robot
Kontroler merupakan perangkat yang penting pada robot
robot Barelang Tracerino merupakan sebuah rangkaian elektronik berbasis mikrokontroler yang berfungsi untuk mengatur fungsi kerja dari masing
Kontroler yang digunakan pada robot Barelang Tracerino memiliki spesifikasi sebagai berikut :
Berbasis mikrokontroler ATMega32 dengan kecepatan
Mega Instruction Per Second),
erintegrasi secara langsung dengan port USB yang dapat digunakan sebagai jalur untuk mengisi program,
Penempatan sensor garis pada robot
Kontroler merupakan perangkat yang penting pada robot. Kontroler pada robot Barelang Tracerino merupakan sebuah rangkaian elektronik berbasis rja dari masing-masing Kontroler yang digunakan pada robot Barelang Tracerino
Berbasis mikrokontroler ATMega32 dengan kecepatan eksekusi program
3. terintegrasi secara langsung dengan
mengendalikan arah dan kecepatan putar motor DC 4. terintegrasi secara langsung dengan
sebagai pengendali robot pada mode manual
5. terintegrasi secara langsung dengan modul komparator yang dapat dihubungkan secara langsung ke sensor garis
Bagian perangkat masukan dan keluaran Barelang Tracer
1.2.4 Body Robot
Body robot merupakan bagian yang berfungsi untuk menempatkan
bagian-bagian utama robot.
memiliki sifat keras dan mudah dibentuk. Pada robot Barelang Tracerino, robot dibentuk dari bahan
dipilih karena memiliki sifat mudah dipotong, bermassa ringan, dan tidak bersifat konduktor
erintegrasi secara langsung dengan Driver motor yang digunakan untuk mengendalikan arah dan kecepatan putar motor DC,
erintegrasi secara langsung dengan port joystick PS yang dapat digunakan sebagai pengendali robot pada mode manual,
erintegrasi secara langsung dengan modul komparator yang dapat dihubungkan secara langsung ke sensor garis.
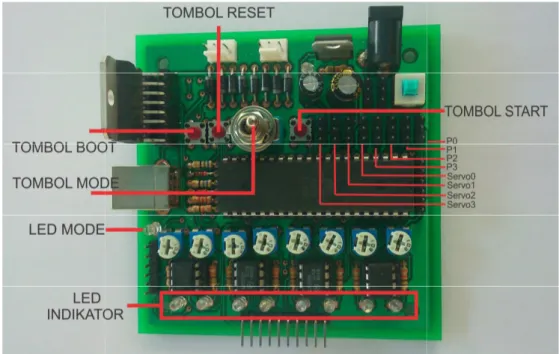
Bagian perangkat masukan dan keluaran yang terintegrasi Barelang Tracerino dapat dilihat pada Gambar 5.
Gambar 5. Kontroler robot Barelang Tracerino
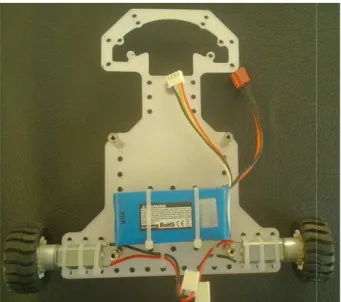
robot merupakan bagian yang berfungsi untuk menempatkan bagian utama robot. Body robot dapat dibentuk dari sebuah
memiliki sifat keras dan mudah dibentuk. Pada robot Barelang Tracerino, robot dibentuk dari bahan akrilik yang dibentuk sedemikian rupa.
dipilih karena memiliki sifat mudah dipotong, bermassa ringan, dan tidak bersifat konduktor sehingga tidak menyebabkan shot circuit pada rangkaian.
yang digunakan untuk
PS yang dapat digunakan
erintegrasi secara langsung dengan modul komparator yang dapat
terintegrasi pada kontroler
Kontroler robot Barelang Tracerino
robot merupakan bagian yang berfungsi untuk menempatkan robot dapat dibentuk dari sebuah profile yang memiliki sifat keras dan mudah dibentuk. Pada robot Barelang Tracerino, body yang dibentuk sedemikian rupa. Bahan akrilik dipilih karena memiliki sifat mudah dipotong, bermassa ringan, dan tidak
1.3 Arduino IDE
Arduino IDE merupakan perangkat lunak yang digunakan untuk melakukan perograman pada robot Barelang Tracerino.
lunak yang bersifat
modifikasi terhadap kode programnya.
Barelang Tracerino merupakan Arduino IDE versi 1.0.5 yang telah dimodifikasi dengan penambahan beberapa fitur.
Arduino IDE yang digunakan harus y Arduino IDE yang diund
langsung digunakan karena belum ada tamba Barelang Tracerino.
Gambar 6. Bentuk body robot
Arduino IDE merupakan perangkat lunak yang digunakan untuk melakukan perograman pada robot Barelang Tracerino. Arduino IDE merupakan perangkat lunak yang bersifat opensource yang berarti semua orang boleh melakukan modifikasi terhadap kode programnya. Arduino IDE yang digunakan pada robot Barelang Tracerino merupakan Arduino IDE versi 1.0.5 yang telah dimodifikasi dengan penambahan beberapa fitur. Untuk memprogram robot Barel
Arduino IDE yang digunakan harus yang berasal dari paket modul Arduino IDE yang diunduh langsung dari website http://www.arduino.cc/
langsung digunakan karena belum ada tambahan modifikasi yang men
Arduino IDE merupakan perangkat lunak yang digunakan untuk melakukan Arduino IDE merupakan perangkat yang berarti semua orang boleh melakukan Arduino IDE yang digunakan pada robot Barelang Tracerino merupakan Arduino IDE versi 1.0.5 yang telah dimodifikasi Untuk memprogram robot Barelang Tracerino, ang berasal dari paket modul pembelajaran ini.
http://www.arduino.cc/tidak dapat han modifikasi yang mendukung robot
PEMROGRAMAN
2.1 Instalasi Driver
Untuk memulai melakukan pemrograman pada robot Barelang Tracerino, terlebih dahulu driver
melakukan proses instalasi
program. Mode program ditandai dengan nyala masuk ke mode program, ik
1. Hubungkan kabel USB ke robot,
2. tekan tombol reset dan tombol boot secara bersamaan
3. lepaskan tombol reset, biarkan tombol boot dalam posisi tertekan dalam beberapa saat,
4. lepaskan tombol boot
5. jika kondisi led mode adalah berkedip maka proses masuk ke mode program telah berhasil.
Jika sudah berhasil masuk ke mode program, tahap selanjutnya adalah melakukan instalasi d
langkah-langkah berikut ini : 1. Klik pada menu Windows,
program and files
BAB II
PEMROGRAMAN ROBOT I
Untuk memulai melakukan pemrograman pada robot Barelang Tracerino,
river perangkat keras robot harus ter-install pada komputer. Untuk
melakukan proses instalasi driver ini, terlebih dahulu mode robot harus dalam . Mode program ditandai dengan nyala led mode yang berkedip.
masuk ke mode program, ikuti langkah-langkah berikut ini : Hubungkan kabel USB ke robot,
ekan tombol reset dan tombol boot secara bersamaan,
lepaskan tombol reset, biarkan tombol boot dalam posisi tertekan dalam
epaskan tombol boot, kemudian perhatikan nyala dari led mode,
kondisi led mode adalah berkedip maka proses masuk ke mode program
Jika sudah berhasil masuk ke mode program, tahap selanjutnya adalah
driver robot. Untuk melakukan proses instalasi
langkah berikut ini :
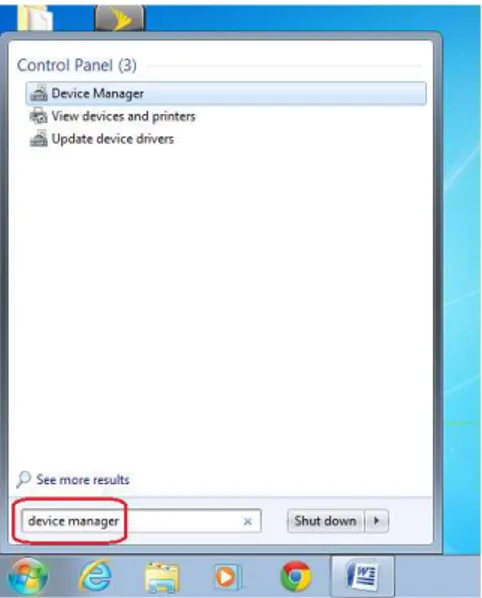
Klik pada menu Windows, ketikkan "device manager" pada menu Search program and files, kemudian klik pada menu Device Manager,
Gambar 8. Membuka Device Manager
Untuk memulai melakukan pemrograman pada robot Barelang Tracerino, pada komputer. Untuk mode robot harus dalam mode mode yang berkedip. Untuk dapat
lepaskan tombol reset, biarkan tombol boot dalam posisi tertekan dalam
mode,
kondisi led mode adalah berkedip maka proses masuk ke mode program
Jika sudah berhasil masuk ke mode program, tahap selanjutnya adalah Untuk melakukan proses instalasi driver robot ikuti
ketikkan "device manager" pada menu Search emudian klik pada menu Device Manager,
2. windows Device Manager
Other devices akan
3. klik kanan pada
4. selanjutnya akan muncul computer for Driver
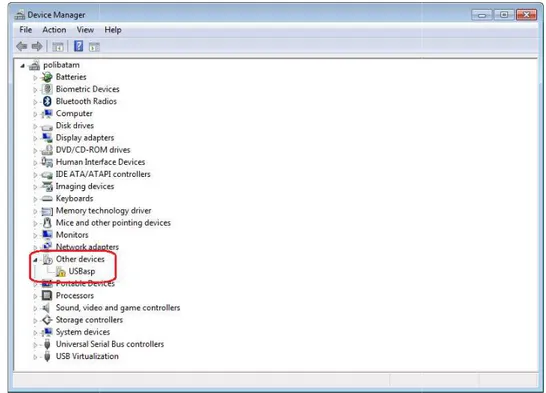
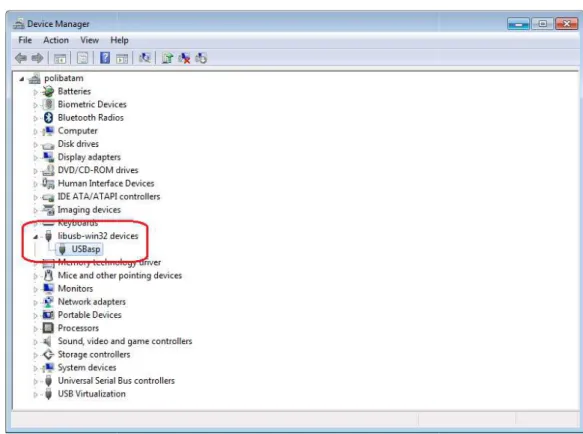
Device Manager akan muncul, kemudian perhatikan pada bagian akan tertera USBasp dengan tanda seru berwarna kuning
Gambar 9. USBasp pada Device Manager
lik kanan pada USBasp kemudian pilih menu Update Driver
Gambar 10. Update driver USBasp
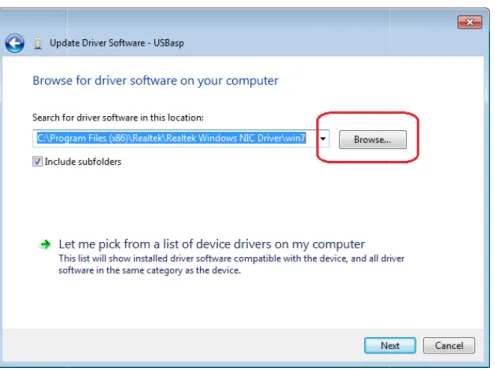
kan muncul window Update Driver Software, pilih Browse my
Driver software,
perhatikan pada bagian dengan tanda seru berwarna kuning,
Driver Software,
Gambar
5. pilihlah lokasi penyimpanan menekan tombol
Gambar 11. Pilihan meng-install driver dari komputer
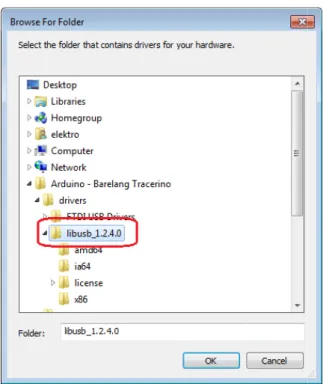
ilihlah lokasi penyimpanan driver robot Barelang Tracerino, lanjutkan dengan ekan tombol OK,
Gambar 12. Memilih lokasi penyimpanan driver dari komputer
robot Barelang Tracerino, lanjutkan dengan
6. lanjutkan proses instalasi dengan menekan tombol Next
7. jika muncul window
Gambar 13. Lokasi penyimpanan driver robot
anjutkan proses instalasi dengan menekan tombol Next,
Gambar 14. Melanjutkan proses instalasi driver
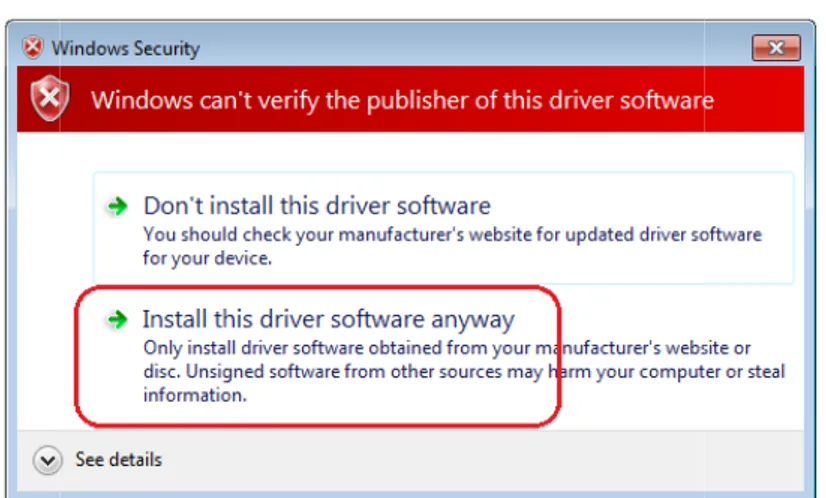
window Windows Security pilih Instal this driver
robot
driver
8. proses instalasi selesai,
9. jika proses instalasi successfully update your
10. Perhatikan pada
tanda seru, yang menandakan bahwa terpasang secara sempurna.
Gambar 15. Peringatan Windows Security
roses instalasi driver akan berjalan, tunggu sampai proses instalasi
ka proses instalasi driver berhasil, maka akan muncul pesan Win successfully update your driver software,
Gambar 16. driver telah berhasil di-install
Perhatikan pada window Device Manager, kini USBasp tidak terdapat lagi icon tanda seru, yang menandakan bahwa driver perangkat keras robot sudah terpasang secara sempurna.
akan berjalan, tunggu sampai proses instalasi driver
sil, maka akan muncul pesan Windows has
tidak terdapat lagi icon perangkat keras robot sudah
2.2 Membuat, Mengkompilasi, dan
Untuk membuat program pada robot Barelang Tracerino diperlukan sebuah IDE (Integrated Development Enviroment
sebuah perangkat lunak yang digunakan untuk menuliskan program, mengkompilasi program, dan mentransfer program ke
Tahap berikut ini akan dilakukan ujicoba untuk membuat, mengkompilasi, dan mentrasfer program
waktu 500 milliseconds
kompilasi, dan melakukan transfer program ke robot dapat dilihat di bawah ini. 1. Buka aplikasi Arduino
Tracerino kemudian menjalankan file arduino.exe,
Gambar 17. USBasp yang sudah berhasil di-install
, Mengkompilasi, dan Mentransfer Program
membuat program pada robot Barelang Tracerino diperlukan sebuah IDE
Integrated Development Enviroment) yang bernama Arduino IDE.
sebuah perangkat lunak yang digunakan untuk menuliskan program, mengkompilasi program, dan mentransfer program ke robot.
hap berikut ini akan dilakukan ujicoba untuk membuat, mengkompilasi, dan sederhana untuk membuat led mode berkedip denga
milliseconds. Tahapan untuk melakukan pembuatan program, melakukan
dan melakukan transfer program ke robot dapat dilihat di bawah ini. Arduino IDE dengan cara membuka folder Arduino Tracerino kemudian menjalankan file arduino.exe,
install
membuat program pada robot Barelang Tracerino diperlukan sebuah IDE IDE. IDE mrupakan sebuah perangkat lunak yang digunakan untuk menuliskan program, mengkompilasi
hap berikut ini akan dilakukan ujicoba untuk membuat, mengkompilasi, dan mode berkedip dengan tunda Tahapan untuk melakukan pembuatan program, melakukan dan melakukan transfer program ke robot dapat dilihat di bawah ini.
Gambar
2. setelah aplikasi Arduino IDE terbuka, p Pilihlah Barelang Tracerino pada tipe
Gambar 18. Folder Arduino - Barelang Tracerino pada
Gambar 19. Fle arduino.exe
setelah aplikasi Arduino IDE terbuka, pilihlah menu Tools kemudian Board elang Tracerino pada tipe board,
Barelang Tracerino pada desktop
3. kemudian lanjutkan dengan memilih menu Programmer, pilihlah tipe
programmer USBasp
Gambar 20. Pilihan tipe board Barelang Tracerino
emudian lanjutkan dengan memilih menu Programmer, pilihlah tipe USBasp,
Barelang Tracerino
4. tuliskan sintaks program berikut ini pada lokasi #include <BarelangTracerino.h> BarelangTracerino Robot; void setup() { Robot.Inisialisasi(); } void loop() { Robot.LedModeBlink(500); }
5. untuk memastikan sintaks yang ditulis adalah benar, lakukan kompilasi program dengan menekan tombol
6. jika sintaks yang dituliskan benar dan tidak terjadi kesalahan, maka akan muncul informasi seperti di bawah ini
uliskan sintaks program berikut ini pada lokasi code editor,
<BarelangTracerino.h>
BarelangTracerino Robot;
Robot.Inisialisasi(); // Inisialisai robot
Robot.LedModeBlink(500); // Led berkedip dengan selang waktu 500ms
ntuk memastikan sintaks yang ditulis adalah benar, lakukan kompilasi program dengan menekan tombol compile,
Gambar 22. Melakukan kompilasi program
ika sintaks yang dituliskan benar dan tidak terjadi kesalahan, maka akan informasi seperti di bawah ini,
// Led berkedip dengan selang waktu 500ms
ntuk memastikan sintaks yang ditulis adalah benar, lakukan kompilasi
Gambar
7. jika tedapat kesalahan pada sintaks program, maka akan muncul pesan berwarna merah seperti berikut ini
Gambar 23. Hasil kompilasi yang tidak terjadi kesalahan
kesalahan pada sintaks program, maka akan muncul pesan berwarna merah seperti berikut ini,
tidak terjadi kesalahan
8. jika sintaks yang dituliskan
melakukan transfer program ke kontroler robot. Proses ini biasanya disebut dengan upload
yang harus dilakukan adalah masuk ke m
upload program p
Gambar
9. jika proses upload Uploading seperti
ika sintaks yang dituliskan tidak ada kesalahan, dapat dilanjutkan dengan melakukan transfer program ke kontroler robot. Proses ini biasanya disebut
program. Untuk melakukan proses upload
yang harus dilakukan adalah masuk ke mode program. Kemudian untuk meng program pilih menu File kemudian pilih Upload Using Programmer
Gambar 25. Melakukan upload program ke kontroler robot
upload program berhasil dilakukan, maka akan muncul pesan Done
seperti gambar berikut ini,
tidak ada kesalahan, dapat dilanjutkan dengan melakukan transfer program ke kontroler robot. Proses ini biasanya disebut
upload program pertama
ode program. Kemudian untuk meng-ilih menu File kemudian pmeng-ilih Upload Using Programmer.
program ke kontroler robot
10. jika ternyata proses
error bewarna merah
Uploading,
Gambar 26. Proses upload program berhasil
ika ternyata proses upload program gagal dilakukan, biasanya terdapat pesan bewarna merah yang menyatakan "avrdude : error : "
program gagal dilakukan, biasanya terdapat pesan setelah pesan Done
2.3 Struktur Pemrograman
Arduino IDE yang digunakan untuk memprogram robot Barelang Tracerino merupakan Arduino IDE
yang lain. Arduino
berorientasi objek. Tambahan terutama bagi pemula.
buah fungsi dasar yaitu fungsi setup dan fungsi loop
void setup() { pernyataan; } void loop() { pernyataan; }
Fungsi setup merupakan
kontroler robot. Fungsi ini akan dijalankan sekali dan akan dijalankan pertama kali ketika robot dinyalakan.
digunakan untuk menuliska
pada fungsi loop akan dijalankan secara terus menerus selama robot dalam keadaan menyala. Fungsi loop akan dijalankan setelah fungsi setup.
nantinya dituliskan program utama dari r
2.4 Library BarelangTracerino
Arduino IDE yang digunakan untuk memprogram robot Barelang Tracerino sudah menyertakan
melakukan pemrograman.
modul kontroler robot Barelang Tracerino. Beberapa fungsi yang disediakan pada
library Barelang Tracerino antara lain seperti berikut ini
1. void Inisialisasi();
Fungsi Inisialisasi digunakan untuk
keluaran yang terhubung pada modul kontroler robot Barelang Tracerino 2. void LedModeBlink(
Fungsi LedModeBlink dengan selang waktu t
Struktur Pemrograman
yang digunakan untuk memprogram robot Barelang Tracerino Arduino IDE dengan penambahan library dan tipe mikrokon
Arduino IDE menggunakan bahasa pemrograman C++ yang . Tambahan library dapat memudahkan dalam pembuatan program, terutama bagi pemula. Struktur dasar pemrograman Arduino IDE
ungsi dasar yaitu fungsi setup dan fungsi loop.
Fungsi setup merupakan sebuah fungsi yang digunakan untuk inisialisasi kontroler robot. Fungsi ini akan dijalankan sekali dan akan dijalankan pertama kali ketika robot dinyalakan. Sedangkan fungsi loop merupakan sebuah fungsi yang digunakan untuk menuliskan program utama robot. Sintaks program yang dituliskan pada fungsi loop akan dijalankan secara terus menerus selama robot dalam keadaan . Fungsi loop akan dijalankan setelah fungsi setup. Pada fungsi loop ini nantinya dituliskan program utama dari robot.
Tracerino.h
Arduino IDE yang digunakan untuk memprogram robot Barelang Tracerino menyertakan library yang dapat digunakan untuk memudahkan dalam melakukan pemrograman. Library yang disertakan hanya bisa digunakan untuk ntroler robot Barelang Tracerino. Beberapa fungsi yang disediakan pada Barelang Tracerino antara lain seperti berikut ini :
Inisialisasi();
Inisialisasi digunakan untuk mendeklarasikan perangkat masukan dan yang terhubung pada modul kontroler robot Barelang Tracerino
LedModeBlink(unsigned int t);
LedModeBlink digunakan untuk memerintahkan led m dengan selang waktu t milliseconds.
yang digunakan untuk memprogram robot Barelang Tracerino dan tipe mikrokontroler AVR IDE menggunakan bahasa pemrograman C++ yang telah dapat memudahkan dalam pembuatan program, IDE terdiri dari dua
sebuah fungsi yang digunakan untuk inisialisasi kontroler robot. Fungsi ini akan dijalankan sekali dan akan dijalankan pertama kali ungsi loop merupakan sebuah fungsi yang n program utama robot. Sintaks program yang dituliskan pada fungsi loop akan dijalankan secara terus menerus selama robot dalam keadaan Pada fungsi loop ini
Arduino IDE yang digunakan untuk memprogram robot Barelang Tracerino yang dapat digunakan untuk memudahkan dalam yang disertakan hanya bisa digunakan untuk ntroler robot Barelang Tracerino. Beberapa fungsi yang disediakan pada
mendeklarasikan perangkat masukan dan yang terhubung pada modul kontroler robot Barelang Tracerino.
3. void LedModeOn(); Fungsi LedModeOn (on). 4. void LedModeOff(); Fungsi LedModeOff 5. bool ModeManual();
Fungsi ModeManual merupakan mendeteksi kondisi
return value fungsi
automatic maka return value
6. bool ModeAutomatic();
Fungsi ModeAutomatic merupakan mendeteksi kondisi
maka return value posisi manual maka 7. bool Start();
Fungsi Start merupakan penekanan tombol
ini akan true. Jika tombol fungsi ini akan false 8. void DriveRobot(int
Fungsi DriveR
menggerakkan robot berdasarka (kecepatanKiri) dan kecepatan
kecepatanKiri dan kecepatanKanan dapat diisi dengan nilai desimal dari sampai 255. Dimana nilai yang positif akan meng
arah depan dengan kecepatan putar motor parameter tersebut. Sedangkan
ke arah belakang parameter tersebut
berhenti dengan pengereman (
LedModeOn();
LedModeOn digunakan untuk memerintahkan led m
LedModeOff();
LedModeOff digunakan untuk memerintahkan led m
ModeManual();
ModeManual merupakan fungsi yang dapat digunakan untuk mendeteksi kondisi tombol mode. Jika tombol mode dalam posisi manual maka fungsi ini akan true. Namun jika tombol mode dalam posisi
return value dari fungsi ini akan false. ModeAutomatic();
ModeAutomatic merupakan fungsi yang dapat digunakan untuk mendeteksi kondisi tombol mode. Jika tombol mode dalam posisi
return value dari fungsi ini akan true. Namun jika tombol
posisi manual maka return value dari fungsi ini akan false.
Start merupakan fungsi yang dapat digunakan untuk mendeteksi tombol start. Jika tombol start ditekan maka return value
. Jika tombol start tidak dalam posisi ditekan maka
false.
int kecepatanKiri, int kecepatanKanan);
DriveRobot merupakan fungsi yang dapat digunakan untuk menggerakkan robot berdasarkan parameter kecepatan putar motor
dan kecepatan putar motor kanan (kecepatanKanan) kecepatanKiri dan kecepatanKanan dapat diisi dengan nilai desimal dari
. Dimana nilai yang positif akan mengakhibatkan motor berputar ke dengan kecepatan putar motor sebesar nilai
parameter tersebut. Sedangkan nilai negatif akan mengakhibatkan motor berputar dengan kecepatan putar motor sebesar nilai absolut dari nilai parameter tersebut. Sedangkan nilai 0 akan membuat motor dalam keadaan
dengan pengereman (breaking).
digunakan untuk memerintahkan led mode menyala
digunakan untuk memerintahkan led mode mati (off).
yang dapat digunakan untuk mode dalam posisi manual maka mode dalam posisi
yang dapat digunakan untuk mode dalam posisi automatic tombol mode dalam
yang dapat digunakan untuk mendeteksi
return value dari fungsi
tidak dalam posisi ditekan maka return value dari
yang dapat digunakan untuk n parameter kecepatan putar motor kiri (kecepatanKanan). Parameter kecepatanKiri dan kecepatanKanan dapat diisi dengan nilai desimal dari -255 akhibatkan motor berputar ke sebesar nilai absolut dari nilai nilai negatif akan mengakhibatkan motor berputar dengan kecepatan putar motor sebesar nilai absolut dari nilai Sedangkan nilai 0 akan membuat motor dalam keadaan
9. void Maju();
Fungsi Maju dapat digunakan untuk dengan kecepatan konstan.
10. void Mundur();
Fungsi Mundur dapat digunakan untuk memerintahkan robot bergerak mundur dengan kecepatan konstan.
11. void BelokKanan();
Fungsi BelokKanan
belok ke kanan dengan kecepatan konstan. 12. void BelokKiri();
Fungsi BelokKiri dapat digunakan untuk memerintahkan robot bergerak belok ke kiri dengan kecepatan konstan.
13. void ManuverKanan();
Fungsi ManuverKanan dapat digunakan untuk memerintahkan robot bergerak belok ke kanan dengan kecepatan konstan.
14. void ManuverKiri();
Fungsi ManuverKiri dapat digunakan untuk memerintahkan robot bergerak belok ke kiri dengan kecepatan konstan.
15. void Stop();
Fungsi Stop dapat digunakan untuk memerintahkan robot untuk berhenti atau diam di tempat.
16. void Maju(unsigned
Fungsi Maju dapat digunakan untuk memerintahkan robot bergerak maju dengan kecepatan konstan
17. void Mundur(unsigned
Fungsi Mundur dapat digunakan untuk memerintahkan robot bergerak mundur dengan kecepatan konstan
18. void BelokKanan(unsigned
Fungsi BelokKanan dapat digunakan untuk memerintahkan robot bergerak belok ke kanan dengan kecepatan konstan
19. void BelokKiri(unsigned
Fungsi BelokKiri dapat digunakan untuk memerintahkan robot bergerak belok ke kiri dengan kecepatan konstan
Maju dapat digunakan untuk memerintahkan robot bergerak maju dengan kecepatan konstan.
Mundur dapat digunakan untuk memerintahkan robot bergerak mundur dengan kecepatan konstan.
BelokKanan();
BelokKanan dapat digunakan untuk memerintahkan robot bergerak dengan kecepatan konstan.
BelokKiri();
BelokKiri dapat digunakan untuk memerintahkan robot bergerak belok ke kiri dengan kecepatan konstan.
ManuverKanan();
ManuverKanan dapat digunakan untuk memerintahkan robot bergerak belok ke kanan dengan kecepatan konstan.
rKiri();
ManuverKiri dapat digunakan untuk memerintahkan robot bergerak belok ke kiri dengan kecepatan konstan.
Fungsi Stop dapat digunakan untuk memerintahkan robot untuk berhenti atau
unsigned char t);
Maju dapat digunakan untuk memerintahkan robot bergerak maju dengan kecepatan konstan selama t milliseconds.
unsigned char t);
Mundur dapat digunakan untuk memerintahkan robot bergerak mundur dengan kecepatan konstan selama t milliseconds.
unsigned char t);
BelokKanan dapat digunakan untuk memerintahkan robot bergerak belok ke kanan dengan kecepatan konstan selama t milliseconds
unsigned char t);
BelokKiri dapat digunakan untuk memerintahkan robot bergerak belok ke kiri dengan kecepatan konstan selama t milliseconds.
memerintahkan robot bergerak maju
Mundur dapat digunakan untuk memerintahkan robot bergerak
memerintahkan robot bergerak
BelokKiri dapat digunakan untuk memerintahkan robot bergerak
ManuverKanan dapat digunakan untuk memerintahkan robot
ManuverKiri dapat digunakan untuk memerintahkan robot bergerak
Fungsi Stop dapat digunakan untuk memerintahkan robot untuk berhenti atau
Maju dapat digunakan untuk memerintahkan robot bergerak maju
Mundur dapat digunakan untuk memerintahkan robot bergerak
BelokKanan dapat digunakan untuk memerintahkan robot bergerak
milliseconds.
20. void ManuverKanan(
Fungsi ManuverKanan dapat digunakan untuk memerintahkan robot bergerak belok ke kanan deng
21. void ManuverKiri(
Fungsi ManuverKiri dapat digunakan untuk memerintahkan robot bergerak belok ke kiri dengan kecepatan konstan
22. void Stop(unsigned
Fungsi Stop dapat digunakan untuk memerintahkan robot
milliseconds.
23. void RunningLed(unsigned
Fungsi RunningLed dapat menyala secara bergantian 24. double PosisiRobot();
Fungsi PosisiRobot dapat digunakan untuk robot dari jalur garis
value dari fungsi
nilai return value
posisi tengah garis maka nilai dari return value adalah 25. void LineFollower();
Fungsi LineFollower dapat digunakan untuk memerintahkan robot bernavigasi mengikuti garis secara otomatis.
karena seluruh algoritma pada
yang dapat disertakan dalam sebuah program.
2.5 Library JoystickPS.h
Selain menyertakan
digunakan untuk memprogram robot Barelang Tracerino juga terdapat JoystickPS.h. Library
secara manual melalui digunaka pada library
ManuverKanan(unsigned char t);
ManuverKanan dapat digunakan untuk memerintahkan robot bergerak belok ke kanan dengan kecepatan konstan selama t milliseconds
ManuverKiri(unsigned char t);
ManuverKiri dapat digunakan untuk memerintahkan robot bergerak belok ke kiri dengan kecepatan konstan selama t milliseconds.
unsigned long t);
dapat digunakan untuk memerintahkan robot
unsigned char t);
RunningLed dapat digunakan untuk memerintahkan l menyala secara bergantian dengan selang waktu selama t milliseconds
PosisiRobot();
sisiRobot dapat digunakan untuk mengetahui posisi penyimpangan robot dari jalur garis. Jika robot berada pada posisi kanan garis maka nilai
ini adalah negatif. Jika robot berada pada posisi kiri garis maka dari fungsi ini adalah positif. Sedangkan jika robot berada pada posisi tengah garis maka nilai return value dari fungsi ini adalah 0
adalah -15 sampai 15.
LineFollower();
LineFollower dapat digunakan untuk memerintahkan robot bernavigasi mengikuti garis secara otomatis. Penggunaan fungsi
karena seluruh algoritma pada line follower sudah dikemas dalam sebuah yang dapat disertakan dalam sebuah program.
.h
menyertakan library BarelangTracerino.h pada Arduino IDE yang digunakan untuk memprogram robot Barelang Tracerino juga terdapat
Library JoystickPS.h ini bisa digunakan pada mode
l melalui joystick playstation. Adapun beberapa
library JoystickPS.h ini antara lain sebagai berikut :
ManuverKanan dapat digunakan untuk memerintahkan robot
milliseconds.
ManuverKiri dapat digunakan untuk memerintahkan robot bergerak
dapat digunakan untuk memerintahkan robot berhenti selama t
digunakan untuk memerintahkan led indikator
milliseconds.
posisi penyimpangan Jika robot berada pada posisi kanan garis maka nilai return adalah negatif. Jika robot berada pada posisi kiri garis maka adalah positif. Sedangkan jika robot berada pada adalah 0. Range nilai
LineFollower dapat digunakan untuk memerintahkan robot fungsi ini lebih mudah sudah dikemas dalam sebuah fungsi
BarelangTracerino.h pada Arduino IDE yang digunakan untuk memprogram robot Barelang Tracerino juga terdapat library JoystickPS.h ini bisa digunakan pada mode pengendalian robot Adapun beberapa fungsi yang dapat JoystickPS.h ini antara lain sebagai berikut :
1. void Inisialisasi();
Fungsi ini digunakan untuk
joystick tersebut digunakan.
2. bool Up();
Fungsi Up digunakan untuk mendeteksi penekanan tombol Jika tombol up ditekan maka
tidak ditekan mana 3. bool Down();
Fungsi Down digunakan untuk mendeteksi penekanan tombol
joystick. Jika tombol
true. Jika tidak ditekan mana
4. bool Right();
Fungsi Right digunakan untuk mendeteksi penekanan tombol
joystick. Jika tombol
true. Jika tidak ditekan mana
5. bool Left();
Fungsi Left digunakan untuk mendeteksi penekanan tombol Jika tombol left ditekan maka
tidak ditekan mana 6. bool Circle();
Fungsi Circle digunakan untuk mendeteksi penekanan tombol
joystick. Jika tombol
true. Jika tidak ditekan mana
7. bool Square();
Fungsi Square digunakan untuk mendeteksi penekanan tombol
joystick. Jika tombol
bernilai true. Jika tidak ditekan mana
false.
8. bool Triangle();
Fungsi Triangle digunakan untuk mendeteksi penekanan tombol
joystick. Jika tombol
bernilai true. Jika tidak ditekan mana
false.
Inisialisasi();
ini digunakan untuk mendeklarasikan perangkat tersebut digunakan.
Up digunakan untuk mendeteksi penekanan tombol
ditekan maka return value dari fungsi ini akan bernilai tidak ditekan mana return value dari fungsi ini akan bernilai false
Down digunakan untuk mendeteksi penekanan tombol . Jika tombol down ditekan maka return value dari fungsi . Jika tidak ditekan mana return value dari fungsi ini akan bernilai
Right digunakan untuk mendeteksi penekanan tombol . Jika tombol right ditekan maka return value dari fungsi . Jika tidak ditekan mana return value dari fungsi ini akan bernilai
Left digunakan untuk mendeteksi penekanan tombol
ditekan maka return value dari fungsi ini akan bernilai tidak ditekan mana return value dari fungsi ini akan bernilai false
Circle digunakan untuk mendeteksi penekanan tombol . Jika tombol circle ditekan maka return value dari fungsi . Jika tidak ditekan mana return value dari fungsi ini akan bernilai
Square digunakan untuk mendeteksi penekanan tombol . Jika tombol square ditekan maka return value dari
. Jika tidak ditekan mana return value dari fungsi
Triangle digunakan untuk mendeteksi penekanan tombol . Jika tombol triangle ditekan maka return value dari
. Jika tidak ditekan mana return value dari fungsi
perangkat joystick sebelum
Up digunakan untuk mendeteksi penekanan tombol up pada joystick. ini akan bernilai true. Jika
false.
Down digunakan untuk mendeteksi penekanan tombol down pada fungsi ini akan bernilai ini akan bernilai false.
Right digunakan untuk mendeteksi penekanan tombol right pada fungsi ini akan bernilai ini akan bernilai false.
Left digunakan untuk mendeteksi penekanan tombol left pada joystick. ini akan bernilai true. Jika
false.
Circle digunakan untuk mendeteksi penekanan tombol circle pada fungsi ini akan bernilai ini akan bernilai false.
Square digunakan untuk mendeteksi penekanan tombol square pada dari fungsi ini akan fungsi ini akan bernilai
Triangle digunakan untuk mendeteksi penekanan tombol triangle pada dari fungsi ini akan fungsi ini akan bernilai
9. bool Cross();
Fungsi Cross digunakan untuk mendeteksi penekanan tombol
joystick. Jika tombol
true. Jika tidak ditekan mana
10. bool R1();
Fungsi R1 digunakan untuk mendeteksi penekanan tombol Jika tombol R1 ditekan maka
tidak ditekan mana 11. bool R2();
Fungsi R2 digunakan untuk mendeteksi penekanan tombol Jika tombol R2 ditekan maka
tidak ditekan mana 12. bool L1();
Fungsi L1 digunakan untuk mendeteksi penekanan tombol Jika tombol L1 ditekan maka
tidak ditekan mana 13. bool L2();
Fungsi L2 digunakan untuk mendeteksi penekanan tombol Jika tombol L2 ditekan maka
tidak ditekan mana 14. bool Start();
Fungsi Start digunakan untuk mendeteksi penekanan tombol
joystick. Jika tombol
true. Jika tidak ditekan mana
15. bool Select();
Fungsi Select digunakan untuk mendeteksi penekanan tombol
joystick. Jika tombol
true. Jika tidak ditekan mana
Cross digunakan untuk mendeteksi penekanan tombol . Jika tombol cross ditekan maka return value dari fungsi . Jika tidak ditekan mana return value dari fungsi ini akan bernilai
R1 digunakan untuk mendeteksi penekanan tombol
ditekan maka return value dari fungsi ini akan bernilai tidak ditekan mana return value dari fungsi ini akan bernilai false
R2 digunakan untuk mendeteksi penekanan tombol
ditekan maka return value dari fungsi ini akan bernilai tidak ditekan mana return value dari fungsi ini akan bernilai false
digunakan untuk mendeteksi penekanan tombol
ditekan maka return value dari fungsi ini akan bernilai tidak ditekan mana return value dari fungsi ini akan bernilai false
digunakan untuk mendeteksi penekanan tombol
ditekan maka return value dari fungsi ini akan bernilai tidak ditekan mana return value dari fungsi ini akan bernilai false
Start digunakan untuk mendeteksi penekanan tombol . Jika tombol start ditekan maka return value dari fungsi . Jika tidak ditekan mana return value dari fungsi ini akan bernilai
Select digunakan untuk mendeteksi penekanan tombol . Jika tombol select ditekan maka return value dari fungsi . Jika tidak ditekan mana return value dari fungsi ini akan bernilai
Cross digunakan untuk mendeteksi penekanan tombol cross pada fungsi ini akan bernilai ini akan bernilai false.
R1 digunakan untuk mendeteksi penekanan tombol R1 pada joystick. ini akan bernilai true. Jika
false.
R2 digunakan untuk mendeteksi penekanan tombol R2 pada joystick. ini akan bernilai true. Jika
false.
digunakan untuk mendeteksi penekanan tombol L1 pada joystick. ini akan bernilai true. Jika
false.
digunakan untuk mendeteksi penekanan tombol L2 pada joystick. ini akan bernilai true. Jika
false.
Start digunakan untuk mendeteksi penekanan tombol start pada fungsi ini akan bernilai ini akan bernilai false.
Select digunakan untuk mendeteksi penekanan tombol select pada fungsi ini akan bernilai ini akan bernilai false.
2.6 Percobaan Pemrograman Dasar 2.5.1 Mengontrol Nyala
Percobaan kali ini bertujuan untuk membuat sebuah program yang berfungsi untuk m
mati led mode aka
berada pada posisi manual mode berada pada posisi
Prosedur :
1. Tuliskan sintaks program di bawah ini pada
#include <BarelangTracerino.h> BarelangTracerino Robot; void setup() { Robot.Inisialisasi(); } void loop() {
// Jika tombol mode pada posisi manual
// Maka led mode menyala
if(Robot.ModeManual()) { Robot.LedModeOn(); }
// Jika tombol mode pada posisi automatic
// Maka led mode mati
else{
Robot.LedModeOff(); }
}
2. lakukan kompilasi dan Tracerino,
3. Setelah program berhasil di lakukan penekanan tombol m pada led m
2.5.2 Running Led
Percobaan kali ini bertujuan untuk membuat sebuah program yang berfungsi untuk menyalakan led indikator secara bergantia
waktu tertentu. pada tombol start
Percobaan Pemrograman Dasar
Nyala Lampu Led Mode Melaui Tombol Mode
Percobaan kali ini bertujuan untuk membuat sebuah program yang berfungsi untuk mengatur kondisi hidup dan mati led mode.
ode akan diatur dari penekanan tombol mode. Jika tombol m berada pada posisi manual maka led mode akan menyala sedangkan jika
ode berada pada posisi automatic maka led mode akan mati
Tuliskan sintaks program di bawah ini pada Arduino IDE
<BarelangTracerino.h>
BarelangTracerino Robot;
setup() {
Robot.Inisialisasi(); // Inisialisasi robot
loop() {
// Jika tombol mode pada posisi manual // Maka led mode menyala
(Robot.ModeManual()) { Robot.LedModeOn();
// Jika tombol mode pada posisi automatic // Maka led mode mati
Robot.LedModeOff();
akukan kompilasi dan upload program pada kontroler Barelang ,
Setelah program berhasil di-upload ke kontroler Barelang Tracerino lakukan penekanan tombol mode dan perhatikan kondisi nyala atau mati
mode.
Percobaan kali ini bertujuan untuk membuat sebuah program yang berfungsi untuk menyalakan led indikator secara bergantia
waktu tertentu. Led akan menyala secara bergantian setelah terjadi penekanan
start.
Tombol Mode
Percobaan kali ini bertujuan untuk membuat sebuah program yang ode. Kondisi nyala dan . Jika tombol mode ode akan menyala sedangkan jika tombol
ode akan mati.
IDE,
program pada kontroler Barelang
ke kontroler Barelang Tracerino n kondisi nyala atau mati
Percobaan kali ini bertujuan untuk membuat sebuah program yang berfungsi untuk menyalakan led indikator secara bergantian dengan selang Led akan menyala secara bergantian setelah terjadi penekanan
Prosedur :
1. Tuliskan sintaks program berikut ini pada
#include <BarelangTracerino.h> BarelangTracerino Robot; void setup() { Robot.Inisialisasi(); while(!Robot.Start()); } void loop() { Robot.RunningLed(50); }
2. lakukan kompilasi dan Tracerino,
3. setelah program berhasil di lakukan penekanan
pada led indikator
2.5.3 Program Pergerakan Dasar Robot
Percobaan kali
berfungsi untuk memerintahkan sebuah robot untuk bergerak maju, mundur, belok kanan, belok kiri, manuver kanan, dan manuver kiri.
Prosedur :
1. Tuliskan sintaks program berikut ini pada Arduino IDE
#include <BarelangTracerino.h> BarelangTracerino Robot; void setup() { Robot.Inisialisasi(); while(!Robot.Start()) { Robot.RunningLed(50); } } void loop() { Robot.Maju(2000); Robot.BelokKanan(2000); Robot.BelokKiri(2000); Robot.ManuverKanan(2000); Robot.ManuverKiri(2000); Robot.Mundur(2000); }
Tuliskan sintaks program berikut ini pada Arduino IDE
<BarelangTracerino.h>
BarelangTracerino Robot;
setup() {
Robot.Inisialisasi(); // Inisialisasi robot
(!Robot.Start()); // Menunggu penekanan tombol start
loop() {
Robot.RunningLed(50); // Program running led dengan selang waktu 50ms
akukan kompilasi dan upload program pada kontroler Barelang ,
etelah program berhasil di-upload ke kontroler Barelang Tracerino lakukan penekanan tombol start dan perhatikan kondisi nyala atau mati
led indikator.
Program Pergerakan Dasar Robot
Percobaan kali ini bertujuan untuk membuat sebuah program yang berfungsi untuk memerintahkan sebuah robot untuk bergerak maju, mundur, belok kanan, belok kiri, manuver kanan, dan manuver kiri.
Tuliskan sintaks program berikut ini pada Arduino IDE
<BarelangTracerino.h>
BarelangTracerino Robot; setup() {
Robot.Inisialisasi(); // Inisialisasi robot
(!Robot.Start()) { // Menunggu penekanan tombol start
Robot.RunningLed(50); // Program running led
loop() {
Robot.Maju(2000); // Robot maju selama 2 detik
Robot.BelokKanan(2000); // Robot belok kanan selama 2 detik
Robot.BelokKiri(2000); // Robot belok kiri selama 2 detik
Robot.ManuverKanan(2000); // Robot manuver kanan selama 2 detik
Robot.ManuverKiri(2000); // Robot manuver kiri selama 2 detik
Robot.Mundur(2000); // Robot mundur selama 2 detik
IDE,
// Menunggu penekanan tombol start
// Program running led dengan selang waktu 50ms
program pada kontroler Barelang
ke kontroler Barelang Tracerino dan perhatikan kondisi nyala atau mati
ini bertujuan untuk membuat sebuah program yang berfungsi untuk memerintahkan sebuah robot untuk bergerak maju, mundur,
Tuliskan sintaks program berikut ini pada Arduino IDE,
// Menunggu penekanan tombol start
// Robot maju selama 2 detik
// Robot belok kanan selama 2 detik // Robot belok kiri selama 2 detik
// Robot manuver kanan selama 2 detik // Robot manuver kiri selama 2 detik // Robot mundur selama 2 detik
2. lakukan kompilasi dan Tracerino,
3. setelah program berhasil di
untuk melihat pergerakan dasar pada robot.
akukan kompilasi dan upload program pada kontroler Barelang ,
etelah program berhasil di-upload, tekanlah tombol untuk melihat pergerakan dasar pada robot.
program pada kontroler Barelang
PEMROGRAMAN ROBOT II
3.1 Algoritma Robot Line F Robot line follower dengan warna tertentu. Untuk dengan sensor garis
Posisi kemiringan robot nantinya akan menentukan pergerakan robot apakah ma belok kanan atau belok kiri
Pada robot Barelang Tracerino informasi posisi kemir diperoleh dengan memanggil
PosisiRobot akan merepresentasikan nilai dari robot terhadap garis terlalu miring ke kiri terhadap garis terlalu miring ke
tengah garis nilai return value
return value ini nantinya akan dijadikan referensi robot untuk berge
posisi tengah (nilai posisi 0
BAB II
PEMROGRAMAN ROBOT II
Line Follower
line follower pada dasarnya memiliki fungsi utama yaitu mengikuti
dengan warna tertentu. Untuk dapat melakukan fungsi tersebut robot harus dilengkapi yang berfungsi untuk mendeteksi posisi robot terhadap garis. Posisi kemiringan robot nantinya akan menentukan pergerakan robot apakah ma belok kanan atau belok kiri.
Pada robot Barelang Tracerino informasi posisi kemiringan robot dapat diperoleh dengan memanggil fungsi PosisiRobot. Return value
akan merepresentasikan nilai dari -15 sampai 15. Nilai
erhadap garis terlalu miring ke kiri. Sedangkan nilai 15 berarti posisi robot terhadap garis terlalu miring ke kanan. Sedangkan jika posisi robot
return value adalah 0. Nilai -15 sampai 15 yang merupakan
ini nantinya akan dijadikan referensi robot untuk berge nilai posisi 0).
Gambar 28. Ilustrasi posisi robot
pada dasarnya memiliki fungsi utama yaitu mengikuti garis obot harus dilengkapi yang berfungsi untuk mendeteksi posisi robot terhadap garis. Posisi kemiringan robot nantinya akan menentukan pergerakan robot apakah maju,
ingan robot dapat
Return value dari fungsi
. Nilai -15 berarti posisi berarti posisi robot Sedangkan jika posisi robot berada tepat di 5 yang merupakan hasil ini nantinya akan dijadikan referensi robot untuk bergerak mencapai
Algoritma sederhana yang dapat diterapkan antara lain dengan menggunakan kontrol if-else. Secara sederhana logika yang dapat diterapkan antara lain sebagai berikut ini.
1. Jika robot berada pada posisi kanan garis agar posisinya bisa kembali ke tengah garis
2. jika robot berada pada posisi kiri garis maka robot h posisinya bisa kembali k
3. jika robot berada pada posisi tengah garis maka robot h posisi di tengah garis bisa dipertahankan
Dari penalaran logika sederhana tersebut selanjutnya dapat kita t pemrograman robot seperti berikut ini.
1. Robot berada pada posisi kanan garis jika nilai posisinya lebi sama dengan 5,
2. Robot berada pada posisi kiri garis jika nilai posisinya lebih sama dengan -5,
3. Robot berada pada posisi tengah garis jika nilai posisinya lebih besar dari dan lebih kecil dari 5
Dari penalaran sederhana diatas seperti berikut ini.
if(Robot.PosisiRobot()>=5) { Robot.BelokKiri(); } else if(Robot.PosisiRobot()<= Robot.BelokKanan(); } else if(Robot.PosisiRobot() > Robot.Maju(); } 3.2 Percobaan Pemrograman
3.2.1 Line Follower dengan Kontrol
Percobaan kali ini bertujuan untuk membuat
follower dengan kontrol
mengikuti garis
Algoritma sederhana yang dapat diterapkan antara lain dengan menggunakan Secara sederhana logika yang dapat diterapkan antara lain sebagai
Jika robot berada pada posisi kanan garis maka robot harus berbelok ke k agar posisinya bisa kembali ke tengah garis,
ika robot berada pada posisi kiri garis maka robot harus berbelok ke kanan posisinya bisa kembali ke tengah garis,
ika robot berada pada posisi tengah garis maka robot harus bergerak maju agar posisi di tengah garis bisa dipertahankan.
Dari penalaran logika sederhana tersebut selanjutnya dapat kita t pemrograman robot seperti berikut ini.
Robot berada pada posisi kanan garis jika nilai posisinya lebi
Robot berada pada posisi kiri garis jika nilai posisinya lebih 5,
Robot berada pada posisi tengah garis jika nilai posisinya lebih besar dari dan lebih kecil dari 5.
enalaran sederhana diatas maka dapat dituliskan dalam sintaks program
(Robot.PosisiRobot()>=5) { Robot.BelokKiri();
iRobot()<=-5) { Robot.BelokKanan();
(Robot.PosisiRobot() >-5 && Robot.PosisiRobot() <5) {
Percobaan Pemrograman Line Follower dengan Kontrol If-Else
Percobaan kali ini bertujuan untuk membuat program sederhana
dengan kontrol if-else. Robot akan diprogram untuk bernavigasi putih yang ada pada karpet berwarna hitam.
Algoritma sederhana yang dapat diterapkan antara lain dengan menggunakan Secara sederhana logika yang dapat diterapkan antara lain sebagai
maka robot harus berbelok ke kiri
arus berbelok ke kanan agar
arus bergerak maju agar
Dari penalaran logika sederhana tersebut selanjutnya dapat kita terapkan dalam
Robot berada pada posisi kanan garis jika nilai posisinya lebih besar dari atau
Robot berada pada posisi kiri garis jika nilai posisinya lebih kecil dari atau
Robot berada pada posisi tengah garis jika nilai posisinya lebih besar dari -5
maka dapat dituliskan dalam sintaks program
program sederhana robot line . Robot akan diprogram untuk bernavigasi
Prosedur :
1. Tuliskan sintaks program berikut ini pada
#include<BarelangTracerino.h> BarelangTracerino Robot; void setup() { Robot.Inisialisasi(); Robot.WarnaGaris = PUTIH; while(!Robot.Start()) { Robot.RunningLed(50); } } void loop() {
// Jika posisi robot berada di kanan garis
// Robot berbelok ke kiri
if(Robot.PosisiRobot()>=5) { Robot.BelokKiri();
}
// Jika posisi robot berada di kiri garis
// Robot berbelok ke kanan
else if(Robot.PosisiRobot()<= Robot.BelokKanan();
}
// Jika posisi robot di tengah
// Robot maju
else if(Robot.PosisiRobot() > Robot.Maju();
} }
2. lakukan kompilasi dan Tracerino,
3. setelah program berhasil di untuk melihat pergerakan robot
3.2.2 Line follower dengan
Percobaan kali ini bertujuan untuk membuat program sederhana robot
follower dengan menggunakan
BarelangTracerino.
dalam pemrograman robot, karena algoritma robot dituliskan pada library
Tuliskan sintaks program berikut ini pada Arduino IDE
<BarelangTracerino.h>
BarelangTracerino Robot; setup() {
Robot.Inisialisasi(); // Inisialisasi robot
Robot.WarnaGaris = PUTIH; // Mendefinisikan warna garis
(!Robot.Start()) { // Menunggu penekanan tombol start
Robot.RunningLed(50); // Program running led
loop() {
// Jika posisi robot berada di kanan garis // Robot berbelok ke kiri
(Robot.PosisiRobot()>=5) { Robot.BelokKiri();
// Jika posisi robot berada di kiri garis // Robot berbelok ke kanan
(Robot.PosisiRobot()<=-5) { Robot.BelokKanan();
// Jika posisi robot di tengah // Robot maju
(Robot.PosisiRobot() >-5 && Robot.PosisiRobot() <5) { Robot.Maju();
akukan kompilasi dan upload program pada kontroler Barelang ,
etelah program berhasil di-upload, tekanlah tombol untuk melihat pergerakan robot mengikuti garis.
dengan Library BarelangTracerino.h
Percobaan kali ini bertujuan untuk membuat program sederhana robot dengan menggunakan library yang sudah disedikan oleh BarelangTracerino.h. Penggunaan library BarelangTracerino
dalam pemrograman robot, karena algoritma robot line follower
library.
Arduino IDE,
// Mendefinisikan warna garis // Menunggu penekanan tombol start
Robot.PosisiRobot() <5) {
program pada kontroler Barelang
, tekanlah tombol start beberapa saat
Percobaan kali ini bertujuan untuk membuat program sederhana robot line yang sudah disedikan oleh BarelangTracerino.h memudahkan
Prosedur :
1. Tuliskan sintaks program berikut ini pada Arduino IDE
#include <BarelangTracerino.h> BarelangTracerino Robot; void setup() { Robot.Inisialisasi(); Robot.WarnaGaris = PUTIH; Robot.Kecepatan = 255; Robot.Kp = 15 while(!Robot.Start()) { Robot.RunningLed(50); } } void loop() { Robot.LineFollower(); }
2. lakukan kompilasi dan Tracerino,
3. Setelah program berhasil di
untuk melihat pergerakan robot mengikuti garis. pergerakan robot dengan percobaan penggunaan kontrol
3.3 Algoritma Robot Manual dengan Kontrol
Robot manual merupakan robot yang dapat bergerak dengan langsung oleh manusia.
kontrol atau joystick.
membuat pergerakan robot berubah
Robot Barelang Tracerino telah menyediakan ke joystick playstation.
untuk mengontrol robot secara manual.
Tuliskan sintaks program berikut ini pada Arduino IDE
<BarelangTracerino.h>
BarelangTracerino Robot;
setup() {
Robot.Inisialisasi(); // Inisisalisasi robot
Robot.WarnaGaris = PUTIH; // Mendefinisikan warna garis
Robot.Kecepatan = 255; // Mendefinisikan kecepatan robbot
Robot.Kp = 150; // Konstanta Proporsional
(!Robot.Start()) { // Menunggu penekanan tombol start
Robot.RunningLed(50); // Menjalankan program running led
loop() {
Robot.LineFollower(); // Program utama line follower
akukan kompilasi dan upload program pada kontroler Barelang ,
Setelah program berhasil di-upload, tekanlah tombol
untuk melihat pergerakan robot mengikuti garis. Perhatikan perbedaan pergerakan robot dengan percobaan penggunaan kontrol
Manual dengan Kontrol Joystick
Robot manual merupakan robot yang dapat bergerak dengan
manusia. Biasanya pengontrolan robot dilakukan melalui remot
joystick. Penekanan tombol-tombol pada remot kontrol atau
membuat pergerakan robot berubah-ubah sesuai dengan tombol-tombol yang ditekan. Robot Barelang Tracerino telah menyediakan port yang dapat dihubungkan langsung
playstation. Joystick playstation nantinya dapat digunakan sebagai alat untuk mengontrol robot secara manual.
Tuliskan sintaks program berikut ini pada Arduino IDE,
// Mendefinisikan warna garis // Mendefinisikan kecepatan robbot // Konstanta Proporsional
// Menunggu penekanan tombol start // Menjalankan program running led
// Program utama line follower
program pada kontroler Barelang
, tekanlah tombol start beberapa saat Perhatikan perbedaan pergerakan robot dengan percobaan penggunaan kontrol if-else.
Robot manual merupakan robot yang dapat bergerak dengan kontrol secara Biasanya pengontrolan robot dilakukan melalui remot tombol pada remot kontrol atau joystick tombol yang ditekan. yang dapat dihubungkan langsung station nantinya dapat digunakan sebagai alat
Pada joystick playstation terdapat beberapa tombol sepe Gambar 29.
Tombol-Algoritma untuk mengendalikan robot secara manual sangatlah sederhana. Robot akan mendeteksi penenkanan tombol, kemudian penekanan tombol tersebut akan dijadikan referensi robot untuk bergerak
diterapkan pada robot manual antara lain 1. Jika tombol up pada
2. jika tombol left 3. jika tombol right 4. jika tombol down
5. jika tidak ada satupun tombol yang ditekan maka robot akan diam
Dari penalaran dasar tersebut dapat dibuat sebuah program sederhana seperti berikut ini. if(Joystick.Up()){ Robot.Maju(); } else if(Joystick.Left()){ Robot.ManuverKiri(); } else if(Joystick.Right()){ Robot.ManuverKanan(); } else if(Joystick.Down()){ Robot.Mundur(); } else{ Robot.Stop(); }
Gambar 29. Bentuk fisik joystick
playstation terdapat beberapa tombol seperti yang te
-tombol tersebut dapat digunakan untuk mengendalikan robot. engendalikan robot secara manual sangatlah sederhana. Robot mendeteksi penenkanan tombol, kemudian penekanan tombol tersebut akan dijadikan referensi robot untuk bergerak. Secara sederhana logika yang dapat diterapkan pada robot manual antara lain sebagai berikut ini.
pada joystick ditekan maka robot akan bergerak maju pada joystick ditekan maka robot akan berbelok ke kiri
right pada joystick ditekan maka robot akan berbelok ke kanan down pada joystick ditekan maka robot akan bergerak mundur
ika tidak ada satupun tombol yang ditekan maka robot akan diam
Dari penalaran dasar tersebut dapat dibuat sebuah program sederhana seperti
// Jika tombol up ditekan
// Robot maju
(Joystick.Left()){ // Jika tombol left ditekan
Robot.ManuverKiri(); // Robot manuver kiri
(Joystick.Right()){ // Jika tombol right ditekan
Robot.ManuverKanan(); // Robot manuver kanan
(Joystick.Down()){ // Jika tombol down ditekan // Robot mundur
// Jika tidak ada yang ditekan // Robot berhenti
rti yang terlihat pada untuk mengendalikan robot. engendalikan robot secara manual sangatlah sederhana. Robot mendeteksi penenkanan tombol, kemudian penekanan tombol tersebut akan Secara sederhana logika yang dapat
ditekan maka robot akan bergerak maju, ditekan maka robot akan berbelok ke kiri,
ditekan maka robot akan berbelok ke kanan, ditekan maka robot akan bergerak mundur, ika tidak ada satupun tombol yang ditekan maka robot akan diam.
Dari penalaran dasar tersebut dapat dibuat sebuah program sederhana seperti
// Jika tombol left ditekan // Jika tombol right ditekan // Jika tombol down ditekan // Jika tidak ada yang ditekan