BAB II Universals Robots) pada tahun 1921. Robot adalah peralatan eletro-mekanik atau bio-mekanik, atau gabungan peralatan yang menghasilkan gerakan yang otonomi maupun gerakan berdasarkan gerakan yang diperintahkan[3].
Awal kemunculan robot dapat dirunut dari bangsa Yunani kuno yang membuat patung yang dapat dipindah-pindah. Pada tahun 270 SM, Ctesibus seorang insinyur Yunani, membuat organ dan jam air dengan komponen yang dapat dipindahkan. Pada zaman Nabi Muhammad SAW telah dibuat mesin perang dengan menggunakan roda dan dapat melontarkan bom. Bahkan Al-Jajari (1136-1206), seorang ilmuan Islam
pada dinasti Artuqid, dianggap sebagai tokoh yang pertama kali menciptakan robot humanoid yang berfungsi sebagai 4 musisi.
Robot adalah rangkaian peralatan mekanika dan elektronika yang di rangkai bersama-sama yang bekerja dan beroperasi sesuai dengan instruksi atau program. Robot yang selama ini kita kenal adalah sebuah mesin berbentuk manusia yang dapat berbicara dan berjalan layaknya manusia. Robot tersebut adalah salah satu jenis robot berdasarkan bentuknya yaitu kategori Android. Robot jenis ini berbentuk seperti kendaraan yang dilengkapi dengan roda dan bergerak seperti sebuah mobil.
2.1.2 Karakteristik Robot
Sebuah robot umumnya memiliki karakteristik sebagai berikut [3]:
2. Mampu Bergerak : Robot umumnya bergerak dengan menggunakan kaki atau
roda, dan pada beberapa kasus robot dapat terbang dan berenang.
3. Cerdas : Robot memiliki kecerdasan buatan agar dapat memutuskan aksi yang tepat dan akurat.
4. Membutuhkan Energi yang Memadai : Robot membutuhkan catu daya yang
memadai.
2.1.3 Tipe Robot
Robot didesain dan dibuat sesuai kebutuhan pengguna. Robot, hingga saat ini, secara umum dibagi menjadi beberapa tipe sebagai berikut [3]:
1. Robot manipulator
Robot manipulator biasanya dicirikan dengan memiliki lengan (arm robot). Robot ini biasanya diterapkan pada dunia industri, seperti pada industri otomotif, elektronik dan komputer. Sedangkan robot mobil mengarah ke robot yang bergerak, meskipun nantinya robot ini juga memiliki manipulator.
2.1.4 Line Follower Robot (Robot Pengikut Garis)
Line follower robot adalah robot yang didesain untuk dapat berjalan mengikuti garis yang membentuk sebuah alur mapping tertentu (biasanya garis yang dipakai berwana hitam atau putih)[4]. Beberapa hal yang perlu dalam merancang line follower robot ini adalah mekanika, elektronik, dan algoritma (software) dari robot.
Line follower robot yang akan dibangun menggunakan dua motor penggerak dan sekaligus sebagai motor pengemudi, yaitu berupa motor kanan dan motor kiri,
2x16 sebagai output, dan main board yang terdiri dari mikrokontroler ATMega32 dan
driver motor DC.
2.2Algoritma Fuzzy
2.2.1 Logika Fuzzy
Logika fuzzy pertama kali dikembangkan oleh Prof. Lotfi A. Zadeh, seorang peneliti dari Universitas California, pada tahun 1960-an. Logika fuzzy dikembangkan dari teori himpunan fuzzy [2].
Fuzzy secara bahasa diartikan sebagai kabur atau samar-samar. Suatu nilai dapat bernilai besar atau salah secara bersamaan. Dalam fuzzy dikenal derajat keanggotaan yang memiliki rentang nilai 0 (nol) hingga 1(satu). Berbeda dengan
himpunan tegas yang memiliki nilai 1 atau 0 (ya atau tidak) [17].
Logika Fuzzy merupakan seuatu logika yang memiliki nilai kekaburan atau kesamaran (fuzzyness) antara benar atau salah. Dalam teori logika fuzzy suatu nilai bias bernilai benar atau salah secara bersama. Namun berapa besar keberadaan dan kesalahan suatu tergantung pada bobot keanggotaan yang dimilikinya. Logika fuzzy
memiliki derajat keanggotaan dalam rentang 0 hingga 1. Berbeda dengan logika digital yang hanya memiliki dua nilai 1 atau 0. Logika fuzzy digunakan untuk menterjemahkan suatu besaran yang diekspresikan menggunakan bahasa (linguistic), misalkan besaran kecepatan laju kendaraan yang diekspresikan dengan pelan, agak cepat, cepat, dan sangat cepat. Logika fuzzy menunjukan sejauh mana suatu nilai itu benar dan sejauh mana suatu nilai itu salah. Tidak seperti logika klasik (scrisp)/tegas, suatu nilai hanya mempunyai 2 kemungkinan yaitu merupakan suatu anggota himpunan atau tidak. Derajat keanggotaan 0 (nol) artinya nilai bukan merupakan anggota himpunan dan 1 (satu) berarti nilai tersebut adalah anggota himpunan.
Logika fuzzy adalah suatu cara yang tepat untuk memetakan suatu ruang input
kedalam suatu ruang output, mempunyai nilai kontinyu. Fuzzy dinyatakan dalam derajat dari suatu keanggotaan dan derajat dari kebenaran. Oleh sebab itu sesuatu dapat dikatakan sebagian benar dan sebagian salah pada waktu yang sama (Kusumadewi. 2004).
seperti "sedikit", "lumayan" dan "sangat" (Zadeh 1965). Kelebihan dari teori logika
fuzzy adalah kemampuan dalam proses penalaran secara bahasa (linguistic reasoning). Sehingga dalam perancangannya tidak memerlukan persamaan matematik dari objek yang akan dikendalikan.
2.3 Mikrokontroller ATMega32
Mikrokontroller merupakan sebuah kombinasi dari sebuah CPU, memori dan I/O yang terintegrasi dalam bentuk sebuah IC atau dapat disebut dengan single Chip. Mikrokontroller AVR (Alf and Vegard’s Risc Processor) standart memiliki arsitektur 8 – bit, dimana semua intruksi dikemas dalam kode 16 – bit dan sebagian besar intruksi dalam
1 (satu) siklus clock. AVR berteknologi RISC (Reduced Intruction Set Computing)[8].
Kontrol utama dari keseluruhan sistem pada penelitian ini ditangani oleh mikrokontroler AVR (Alf and Vegard’s Risc Processor) ATmega32. Mikrokontroler ini memiliki arsitektur 8 bit, dimana semua instruksi dikemas dalam kode 16 – bit, dan sebagian besar instruksinya dieksekusi dalam satu siklus clock. Kelebihan dari ATmega32 sehingga digunakan sebagai kontrol utama adalah sebagai berikut[8]:
1. Mempunyai performa yang tinggi (berkecepatan akses maksimum 16MHz) tetapi hemat daya.
2. Memori untuk program flash cukup besar yaitu 32Kb. 3. Memori internal (SRAM) cukup besar yaitu 2Kb. 4. Mendukung hubungan serial SPI.
5. Tersedia 3 channel timer/counter (2 untuk 8 bits dan 1 untuk 16 bits).
Gambar 2.1 Bentuk Fisik Mikrokontroller ATMega32[8]
Mikrokontroler Keluarga AVR secara umum dikelompokkan menjadi 6 (enam) kelompok, yaitu[15] :
b. Keluarga AT90Sxx : Merupakan mikrokontroler yang pertama kali dibuat oleh
Atmel Corp.
c. keluarga ATMega : Merupakan pengembangan mikrokontroler AT90Sxx dengan fitur yang lebih banyak.
d. Keluarga AT86RFxx : Merupakan mikrokontroler berorientasi desai minimal.
e. Keluarga AT90USBxx : Merupakan mikrokontroler yang berorientasi pemrograman USB.
f. Keluarga AVR 32 Bit contohnya AP7000, UC3Axxxx, UC3Bxxx, UC3Lxx, dsb : Merupakan mikrokontroler dengan register dan instruksi dengan panjang 32 bit.
Mikrokontroler ATMega32 adalah keluarga dari ATMega yang memiliki Arsitektur seperti gambar 2.2 berikut :
Fitur-fitur yang dimiliki oleh ATMega32 adalah sebagai berikut[15]:
a. Performa tinggi, mikrokontroler berdaya rendah. b. Mikrokontroler dengan arsitektur RISC 8 bit.
1. 131 kode instruksi dalam bahasa assembly, hampir semua membutuhkan satu clock untuk eksekusi.
2. Mempunyai 32 x 8 bit register kerja kegunaan umum.
3. Pengoprasian full static, artinya clock dapat diperlambat, bahkan dihentikan sehingga chip berada dalam kondisi sleep. CMOS juga lebih tahan terhadap
noise.
4. Kecepatan mengeksekusi sampai dengan 16 mega instruksi per detik pada saat diberikan osilator sebesar 16 MHZ.
5. Terdapat rangkaian pengali 2 (dua) kali untuk siklus kerjanya di dalam chip. c. Flash EEPROM (Electrically Eraseable Programmable Read Only Memory)
sebesar 32 kilobyte yang dapat diprogram ulang dan dengan kemampuan Read While Write.
d. Ketahanan hapus-tulis Flash ROM adalah 10.000 kali dengan pengaturan pilihan kode boot dan Lock Bit yang independen.
e. Memori SRAM sebesar 2 kilobyte yang dapat dihapus-tulis 100.000 kali.
f. Penguncian kode program untuk keamanan perangakat lunak agar tidak dapat dibaca.
g. Memori yang non-volatile EEPROM sebesar 1024 byte.
h. Memiliki 2 buah timer/counter 8 bit sebanyak 2 buah dan sebuah timer/counter
16 bit dengan opsi PWM sebanyak 4 kanal.
i. Memiliki 8 kanal Analog to Digital Converter 10 bit dengan jenis single ended. j. Untuk kemasan TQFP ADC dapat diatur 7 buah kanal jenis diferensial dan
khusus 2 kanal dengan penguatan yang dapat diatur melalui registernya sebesar
1x, 10x atau 20x.
k. Antarmuka komunikasi serial USART yang dapat diprogram dengan kecepatan maksimal 2,5 Mbps.
l. Antarmuka SPI master / slave.
m. Watchdog timer dengan osilator di dalam chip yang dapat diprogram. n. Komparator Analog di dalam chip.
p. Osilator RC internal yang terkalibrasi.
q. Sumber interupsi internal dan eksternal.
r. Pilihan Mode sleep : idle, pereduksi noise ADC, penghematan daya konsumsi, penurunan daya, kondisi standby.
s. 32 Pin masukan dan keluaran terprogram.
t. Terdapat pilihan kemasan PDIP 40 pin,TQFP 44 kaki, QFN/MLF 44 titik. u. Tegangan pengoprasian
1. 2,7 – 5,5 Volt untuk ATMega32L 2. 4,5 – 5,5 Volt untuk ATMega32 v. Kecepatan
1. 0 – 8 MHz untuk ATMega32L 2. 0 – 16 MHz untuk ATMega32
w. Konsumsi daya pada 1 MHz, 3 Volt, suhu 25o C untuk ATMega32L. 1. Aktif : 1,1 Miliampere
2. Mode idle : 0,35 Miliampere
3. Mode power down : kurang dari 1 Mikroampere
ATMega32 dapat dilihat pada Gambar 2.3 berikut.
Konfigurasi Pin ATMega32 dapat dilihat pada table 2.1 berikut:
Tabel 2.1 Konfigurasi Pin ATMega32
Nomor Pin Nama Fungsi
10 VCC Catu daya positif
11, 31 GND Catu daya negative/ground
30 AVCC Catu daya positif untuk ADC internal
32 AREF Pin untuk tegangan referensi AADC
1 – 8 PB7…PB0 Pin masukan dan keluaran Port B
33 – 40 PA7…PA0 Pin masukan dan keluaran Port A
14 – 21 PD7…PD0 Pin masukan dan keluaran Port D
22 – 29 PC7…PC0 Pin masukan dan keluaran Port C
9 RESET Pin masukan untuk reset (active low)
12, 13 XTAL1 dan 2 Pin untuk masukan osilator eksternal
Memori ATMega32 dapat dilihat pada gambar 2.4 berikut:
(a) (b)
Untuk dapat menggunakan atau mengoprasikan mikrokontroller ATMega32,
harus dibuat sistem minimum yang meliputi komponen antara lain : sumber tegangan (Vcc) sebesar 5V DC, Ground (Gnd) dan sistem reset. Mikrokontroller ATMega32 memiliki clock generator internal sebesar 1 MHz, sehingga mikrokontroller ini dapat bekerja langsung tanpa harus menggunakan clock external.
Untuk membuat program mikrokotroler ATMega32 digunakan editor dan
compiler untuk bahasa C. Dalam pembahasan ini editor dan compiler yang digunakan adalah WinAVR. Setelah proses pembuatan dan kompilasi program selesai dilakukan akan diperoleh file intel hex (*.hex). File ini adalah file yang nantinya akan diprogramkan ke mikrokontroler ATMega32 melalui interface bsd programmer (Brian Dean's Programmer) yang terhubung ke komputer melalui antarmuka port
paralel komputer. Koneksi antara ATmega32 dan port paralel untuk bsd programmer
diberikan oleh tabel 2.2.
Tabel 2.2 Koneksi Pin Port Paralel dan ATmega32
Port Paralel ATMega32
2.3.1 Car a Kerja Mikrokontroller
Prinsip kerja mikrokontroler adalah sebagai berikut:
Berdasarkan nilai yang berada pada register Program Counter, mikrokontroler mengambil data pada ROM dengan alamat sebagaimana yang tertera pada register Program Counter. Selanjutnya isi dari register Program Counter ditambah dengan satu (Increment) secara otomatis.
Data yang diambil pada ROM merupakan urutan instruksi program yang telah dibuat dan diisikan sebelumnya oleh pengguna.
pada register, RAM, isi Port, atau melakukan pembacaan dan dilanjutkan dengan
pengubahan data.
Program Counter telah berubah nilainya (baik karena penambahan otomatis pada langkah 1, atau karena pengubahan-pengubahan pada langkah 2). Selanjutnya yang dilakukan oleh mikrokontroler adalah mengulang kembali siklus ini pada
langkah 1. Demikian seterusnya hingga power dimatikan.
2.4 Aktuator
Aktuator adalah bagian yang berfungsi sebagai penggerak dari perintah yang diberikan oleh input. Aktuator biasanya merupakan peranti elektromekanik yang menghasilkan gaya gerakan. Aktuator terdiri dari 2 jenis, yaitu[3]:
1. Aktuator elektrik
2. Aktuator pneumatik dan hidrolik.
Pada penelitian ini aktuator yang akan digunakan adalah aktuator elektrik yang berupa motor DC yang akan dijelaskan sebagai berikut :
2.4.1 Motor DC
Gambar 2.5 Prinsip Gaya Lorentz[18] (Sumber: ht t p:/ / hyperphysics.phy-ast r.gsu.edu)
Dengan berdasarkan pada prinsip gaya Lorentz, memberikan tegangan pada DC motor akan membuat motor berputar secara kontinyu ke arah tertentu. Membalik arah putaran motor dapat dilakukan dengan mengubah polaritas arus yang mengalir pada motor. Gambar 2.6 memperlihatkan arah perputaran motor DC berdasarkan polaritas arus yang mengalir.
Gambar 2.6 Ar ah perputaran motor DC[18]
Motor DC biasanya mempunyai kecepatan putar yang cukup tinggi dan sangat cocok digunakan untuk roda robot yang membutuhkan kecepatan gerak yang tinggi. Pada penelitian ini motor DC digunakan sebagai penggerak utama robot line follower.
2.4.2 Motor Servo Standar
Motor servo adalah motor DC yang dilengkapi dengan sistem kontrol. Sistem kontrol ini akan memberikan umpan balik posisi perputaran motor dari 0 sampai 180 derajat. Disamping itu motor ini juga memiliki torsi relatif cukup kuat. Gambar 2.7 menunjukkan penampang dan pengkabelan dari motor servo. Sistem pengkabelan motor servo terdiri atas 3 bagian, yaitu Vcc, Gnd, dan Kontrol (PWM= Pulse Width Modulation). Pemberian PWM pada motor servo akan membuat servo bergerak pada posisi tertentu dan kemudian berhenti (kontrol posisi)[18].
Gambar 2.7 Motor servo dan konfigurasi pin[18]
Prinsip utama dari pengendalian motor servo adalah pemberian nilai PWM pada kontrolnya. Frekuensi PWM yang digunakan pada pengontrol motor servo selalu 50 Hz sehingga pulsa dihasilkan setiap 20 ms. Lebar pulsa akan menentukan posisi servo yang dikehendaki. Pemberian lebar pulsa 1,5 ms akan membuat motor servo berputar ke posisi netral (90 derajat), lebar pulsa 1,75 ms akan membuat motor servo berputar l;;\mendekati posisi 180 derajat, dan dengan lebar pulsa 1,25 ms motor servo akan bergerak ke posisi 0 derajat. Gambar 2.8 berikut memperlihatkan hubungan antara lebar pulsa PWM dengan arah putaran motor servo.
Gambar 2.8 Hubungan Lebar Pulsa PWM dengan Arah Putaran Motor Servo[18]
2.4.3 Dr iver Motor DC L298
mengendalikan 2 motor DC menggunakan H-Bridge driver motor DC L298 pada
mode paralel[18].
Prinsip kerja IC L298, IC ini memiliki empat channel masukan yang didesain untuk dapat menerima masukan level logika TTL. Masing-masing channel masukan ini memiliki channel keluaran yang bersesuaian. Gambar 2.7 memperlihatkan
penampang IC L298. Dengan memberi tegangan 5 volt pada pin enable A dan enable
B, masing-masing channel output akan menghasilkan logika high (1) atau low (0) sesuai dengan input pada channel masukan. Untuk lebih jelasnya prinsip kerja IC L298 dapat dilihat pada tabel 2.9.
Gambar 2.9 Penampang IC L298[18]
Tabel 2.3 Logika Prinsip Kerja IC L298
Enable A,B Input 1,3 Output 1,3 Input 2,4 Output 2,4
1
0 0 0 0
1 1 1 1
0
0 X 0 X
2.5 Keypad Matr iks 4x4
Keypad merupakan salah satu peripheral yang sangat penting dalam sistem komputer.
Keypad matriks 4x4 pada dasarnya merupakan konfigurasi saklar/tombol yang disusun berdasarkan baris dan kolom (4 baris dan 4 kolom).
Pada Gambar 2.10 ditunjukkan ilustrasi susunan / konfigurasi keypad 4x4 yang lazim. Keypad 4x4 biasa juga disebut keypad heksadesimal karena terdapat 16 tombol yang dapat mewakili semua karakter heksadesimal dari 0-9 dan A-F. Untuk keperluan yang lain karakter tersebut boleh digannti sesuai dengan penggunaannya.
Gambar 2.10 Konfigurasi Keypad Matr iks 4x4
(sumber : http://electrocontrol.files.wordpress.com/2011/04/dasar-keypad.jpg)
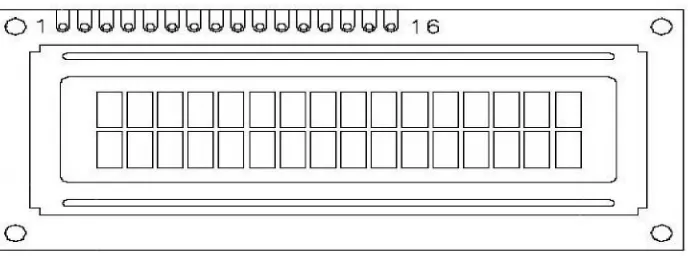
2.6 LCD (Liquid Crystal Display) Karakter 16x2
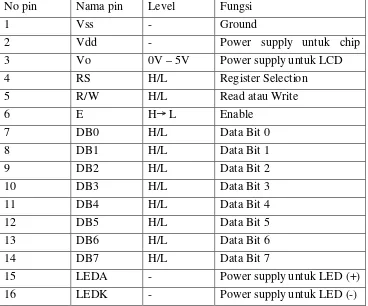
LCD (liquid crystal display) adalah piranti output untuk sistem komputer atau mikrokontroler yang dapat menampilkan karakter standar yang telah tersimpan dalam ROM pada LCD tersebut. Karakter yang dapat ditampilkan sebanyak 32 karakter yang tersusun dalam 16 kolom dan dua baris, sehingga sering disebut LCD 16x2. LCD memiliki 16 pin dan memerlukan tegangan 5V DC. Gambar 2.11 menunjukkan bentuk dan susunan pin LCD dan keterangan dari setiap pin diberikan pada tabel 2.4.
Sebelum menggunakan modul LCD ini, power supply 5V DC harus diberikan sebagai sumber arusnya seperti yang ditunjukkan gambar 2.12.
Gambar 2.12 Hubungan Power Supply ke LCD[15]
Tabel 2.4 Keterangan Pin LCD Karakter 16x2
No pin Nama pin Level Fungsi
1 Vss - Ground
2 Vdd - Power supply untuk chip
3 Vo 0V – 5V Power supplyuntuk LCD
4 RS H/L Register Selection
5 R/W H/L Read atau Write
6 E H→ L Enable
7 DB0 H/L Data Bit 0
8 DB1 H/L Data Bit 1
9 DB2 H/L Data Bit 2
10 DB3 H/L Data Bit 3
11 DB4 H/L Data Bit 4
12 DB5 H/L Data Bit 5
13 DB6 H/L Data Bit 6
14 DB7 H/L Data Bit 7
15 LEDA - Power supply untuk LED (+)
16 LEDK - Power supply untuk LED (-)
1. Mengatur display LCD, cursor dan blink.
Tabel 2.5 Pengaturan Display LCD
E RS R/W DB7 DB6 DB5 DB4 DB3 DB2 DB1 DB0
1→ 0 0 0 0 0 0 0 1 D C B
Keterangan:
D: D=0 display mati dan D=1 display hidup
C: C=0 cursor mati dan C=1 cursor hidup
B: B=0 blink mati dan B=1 blink hidup
2. Mengatur karakter yang akan ditampilkan
Tabel 2.6 Pengaturan Display LCD
E RS R/W DB7 DB6 DB5 DB4 DB3 DB2 DB1 DB0
1→ 0 0 0 Nilai berdasarkan CGROM
2.7 Sensor
Pada penelitian ini, robot line follower menggunakan sensor proximity yang dapat mendeteksi ada atau tidak adanya suatu garis, dimana garis ini merupakan pembimbing gerak robot. Sensor ini dapat dibuat dari pasangan IRED (InfraRed Emitting Diode) dan Photodiode . IRED merupakan LED (Light Emitting Diode) yang memancarkan inframerah, sedangkan photodiode merupakan sebuah dioda semikunduktor yang berfungsi sebagai sensor cahaya (sensor penerima cahaya).
2.8Cara Kerja Sensor Garis (Line Follower)
Robot mengguanakn IR sensor (dalam hal ini menggunakan LED dan photodiode
sebagai pengganti IR sensor) untuk mendeteksi jalur yang dibuat, yaitu dengan cara :
pososi robot diletakkan pada jalur, usahakan posisi jalur hitam berada ditengah - tengah IR sensor kiri dan IR sensor kanan[8].
Gambar 2.14 Cara Kerja Sensor Garis[8]
Pada gambar 2.14 photodiode menerima cahaya jika cahaya dari IRED memantul pada permukaan yang berwarna putih , dan photodiode tidak menerima
![Gambar 2.1 Bentuk Fisik Mikrokontroller ATMega32[8]](https://thumb-ap.123doks.com/thumbv2/123dok/3901546.1857436/4.595.267.380.550.646/gambar-bentuk-fisik-mikrokontroller-atmega.webp)
![Gambar 2.2 Arsitektur Mikrokontroller ATMega32[15]](https://thumb-ap.123doks.com/thumbv2/123dok/3901546.1857436/5.595.171.469.322.741/gambar-arsitektur-mikrokontroller-atmega.webp)
![Gambar 2.3 Penampang dan Konfigurasi Pin Mikrokontroller ATMega32[15]](https://thumb-ap.123doks.com/thumbv2/123dok/3901546.1857436/7.595.183.447.460.743/gambar-penampang-dan-konfigurasi-pin-mikrokontroller-atmega.webp)
![Gambar 2.4 : Memory ATMega32[15] (a) Flash Program Memory, (b) Data](https://thumb-ap.123doks.com/thumbv2/123dok/3901546.1857436/8.595.109.498.419.724/gambar-memory-atmega-a-flash-program-memory-data.webp)
![Gambar 2.5 Prinsip Gaya Lorentz[18] (Sumber: http:/ / hyperphysics.phy-astr.gsu.edu)](https://thumb-ap.123doks.com/thumbv2/123dok/3901546.1857436/11.595.190.438.373.507/gambar-prinsip-gaya-lorentz-sumber-http-hyperphysics-astr.webp)
![Gambar 2.7 Motor servo dan konfigurasi pin[18]](https://thumb-ap.123doks.com/thumbv2/123dok/3901546.1857436/12.595.211.464.402.518/gambar-motor-servo-dan-konfigurasi-pin.webp)
![Gambar 2.9 Penampang IC L298[18]](https://thumb-ap.123doks.com/thumbv2/123dok/3901546.1857436/13.595.138.496.525.685/gambar-penampang-ic-l.webp)