vii
In the currently of rocket technology, development is very fast. The rocket compartment contains an object, that is called the payload. A payload can be said to be modern and well if the payload can be controlled automatically or manually. The control it will not be achieved without a reference value. To get the reference value in the payload, must be completed with the sensors, it is necessary a method control system of payload with remotely, equipped with location detection coordinates.
In making this final task, we have performed a variety of tests, it has successfully created an autonomous payload GPS based. The device is capable of knowing coordinates of a place and be able to know the direction of the destination with help of a digital compass. These devices can be controlled automatically or manually of remotely, the control center from the ground segment. The ground segment are designed using the Visual Basic 6.0 software.
The results had been achieved from this design is has been successfully designed a GPS based autonomous payload which can be know the direction of the destination location and reading the coordinates of a place by the GPS has been successfully performed with accuracy 10m. Such information can be sent to ground segment with properly, with reference to the rule Korindo 2010 a payload can be used for homing mode.
vi
Dalam sebuah teknologi roket saat ini perkembangannya sangat pesat. Dalam roket tersebut terdapat muatan yang dinamakan payload. Sebuah payload disebut modern dan baik apabila payload tersebut dapat dikendalikan secara otomatis maupun manual. Kendali tersebut tidak akan tercapai tanpa adanya nilai untuk dijadikan acuan. Untuk mendapatkan sebuah nilai acuan pada muatan roket harus dilengkapi dengan sensor, maka diperlukan adanya suatu metode kendali muatan roket dengan sistem jarak jauh, dilengkapi dengan pendeteksi lokasi koordinat.
Pada pembuatan tugas akhir ini telah dilakukan berbagai macam pengujian, maka telah berhasil dibuat sebuah autonomous payload atau muatan roket berbasis GPS. Perangkat tersebut mampu mengetahui titik koordinat suatu tempat serta dapat mengetahui arah lokasi tujuan dengan menggunakan bantuan kompas digital. Perangkat ini dapat dikendalikan secara otomatis maupun manual dari jarak jauh, dengan pusat kendali dari ground segment. Ground Segment tersebut dirancang menggunakan software Visual Basic 6.0.
Hasil yang telah dicapai dari perancangan ini yaitu, telah berhasil dirancang sebuah autonomous payload berbasis GPS yang dapat mengetahui arah lokasi tujuan, dan pembacaan titik koordinat suatu tempat oleh GPS telah berhasil dilakukan dengan ketelitian 10m. Informasi tersebut dapat dikiirimkan ke ground segment dengan baik, dengan mengacu ke rule Korindo 2010 payload atau muatan roket dapat digunakan untuk mode homing.
1
1.1 Latar Belakang
Roket merupakan suatu pesawat antariksa yang sering digunakan untuk tujuan khusus. Sebuah roket memiliki makna yang strategis. Apabila suatu negara memiliki teknologi roket maka negara tersebut dapat disebut negara berkembang dan akan disegani oleh negara lain.
Dalam sebuah teknologi roket saat ini perkembangannya sangat pesat. Sebuah roket dapat disebut modern dan baik apabila di dalamnya terdapat suatu muatan yang dinamakan dengan payload. Payload ini tidak hanya payload biasa seperti halnya barang yang tidak dapat memberikan keuntungan apapun, tetapi dengan adanya payload ini sebuah roket diharapkan dapat memberikan suatu informasi yang dapat memberi keuntungan bagi penggunanya. Apabila suatu roket diisi dengan muatan yang baik, maka roket dapat digunakan untuk tujuan tertentu. Untuk dapat disebut modern dan bisa memberikan suatu informasi yang memuaskan, alangkah baiknya sebuah roket yang berisi payload dapat dikendalikan secara otomatis maupun manual. Untuk melakukan hal tersebut, dibutuhkan suatu kemampuan dan pemahaman teknologi yang membutuhkan SDM yang terpelajar, sehigga hal ini dapat mendorong dunia pendidikan di negara Indonesia untuk lebih maju.
1.2 Maksud dan Tujuan
Maksud dan tujuan dalam pembuatan tugas akhir ini adalah mampu membuat kendali payload secara automatis maupun secara manual, serta diharapkan dapat diaplikasikan pada dunia antariksa dan penerbangan.
1.3 Rumusan Masalah
Masalah yang akan dibahas adalah bagaimana merancang, membaca data, mengolah data, mengendalikan dan mengirimkan informasi ke ground segment menggunakan mikrokontroler PICAXE-40X2 sebagai unit kontrolnya. Masalah yang dibahas difokuskan pada perancangan hardware dan autonomous payload tersebut.
1.4 Batasan Masalah
Pada pembuatan autonoumous payload menggunakan mikrokontroler PICAXE-40X2, penulis mempertimbangkan beberapa hal untuk membatasinya guna mempermudah penulis dalam membuat pembahasan dan analisa dari hardware yang dibuat.
Ruang lingkup yang dibatasi pada pembuatan dan penggunaan hardware yang meliputi:
a.Sistem kerja dari hardware hanya pada pengendalian payload b.Perancangan hardware menggunakan mikrokontroler PICAXE-40X2
1.5 Metode Penulisan Laporan
1.6 Metode Penelitian
a Metode Perancangan
Perancangan merupakan tahapan dari perancangan hardware, desain, dan sistem kontrol yang akan digunakan untuk autonomous payload. b Metode Pengujian
Metode ini dilakukan setelah hardware tersebut selesai, apakah hardware tersebut berjalan dengan baik atau tidak.
1.6.1 Metode Pembahasan
a Pembuatan hardware
Langkah ini menjelaskan bagaimana cara perancangan hardware dimulai dari awal.
b Pengujian hardware
Pengujian hardware dilakukan guna mengetahui payload sudah dapat mengendalikan secara otamatis dan pengiriman informasi.
c Analisa hardware
Setelah dilakukan pengujian terhadap hardware tersebut maka dilakukan analisa terhadap apa saja yang kurang dari hardware tersebut.
1.7 Sistematika Penulisan
Agar mempermudah penulis dalam menyusun laporan akhir secara lebih jelas dan sistematis, maka dilakukan pembagian dalam sistematika penulisan yang terdiri dari beberapa bab pembahasan. Urutan bab pembahasan sebagai berikut :
BAB I PENDAHULUAN
BAB II LANDASAN TEORI
Bab ini akan menjelaskan tentang semua landasan teori yang berhubungan dengan hardware yang akan dibuat.
BAB III DESKRIPSI MASALAH
Pada bab ini menjelaskan perancangan hardware, mulai dari tujuan, komponen yang digunakan, perancangan desain hardware, pembuatan program, dan cara menggunakan/ menjalankan hardware.
BAB IV PENGUJIAN DAN ANALISA
Bab ini berisi hasil dan bahasan yang ditekankan pada perumusan masalah, yaitu tentang pengujian lapangan, serta prinsip kerja dari payload tersebut.
BAB V KESIMPULAN DAN SARAN
5
2.1 Pengertian dan Sejarah Payload
Payload merupakan muatan dari sebuah roket yang dapat memberikan keuntungan kepada penggunanya. Di Indonesia payload sering digunakan oleh instansi pemerintah yaitu LAPAN. Salah satu payload yang pernah diuji terbang oleh instansi pemerintah adalah payload misi komunikasi radio amatir pada tahun 1982. Pada tahun 1996 Indonesia menguji terbang konsentrator antariksa (digipeater). Konsentrator antariksa (konsensa) pada dasarnya merupakan komputer yang berfungsi sebagai flying mail box dan router untuk komunikasi dengan mode store and forward. Payload ini dibuat sebagai jalan keluar dari jaringan-jaringan komunikasi yang sudah mulai macet diperiode ini.
Pada tahun 2001 Indonesia mengembangakan model engineering satelit Lapsat. Model payload ini dirancang untuk dapat memenuhi persyaratan operasi seperti setiap subsistem harus terintegrasi, pengoperasian catu daya, muatan komunikasi data digital dan telemetri harus dapat dikendalikan sepenuhnya dari onboard komputer.
Salah satu contoh gambar payload roket adalah sebagai berikut:
2.2 Metode Transmisi
Dalam mentransmisikan data terdapat tiga macam metode transmisi data, yaitu :
2.2.1 Simplex
a. Sinyal ditransmisi dalam satu arah
b. Stasiun yang satu bertindak sebagai pengirim (transmitter) dan yang lain sebagai penerima (receiver), tugasnya adalah tetap.
c. Jarang digunakan untuk sistem komunikasi data
2.2.2 Half duplex
a. Sinyal ditransmisikan ke dua arah secara bergantian
b. Kedua stasiun dapat melakukan transmisi tetapi hanya sekali dalam suatu waktu
c. Terdapat “turn around time” (waktu untuk mengubah arah)
2.2.3 Full duplex
a. Sinyal ditransmisikan ke dua arah secara bersamaan
2.3 Perangkat Keras
Dalam perancangan payload ini menggunakan beberapa perangkat keras untuk mendukung kerjanya. Adapun perangkat keras yang dipakai adalah sebagai berikut:
2.3.1 Mikrokontroler PICAXE-40X2
Mikrokontroler PICAXE-40X2 merupakan mikrokontroler yang memiliki karakteristik sistem yang unik pada saat ini. Mikrokontroler ini dapat diprogram berulang-ulang sampai 100.000 kali. Mikrokontroler PICAXE-40X2 dapat diprogram menggunakan bahasa basic dan flowchart, sehingga dapat memudahkan penggunaan mikrokontroler ini. Program yang di-download ke mikrokontroler akan disimpan di flash memori. Flash memori ini dapat ditulis ulang sampai 100.000 kali. Program yang tersimpan di memori tidak akan hilang ketika sumber daya diputus, sehingga program akan kembali berjalan ketika sumber daya disambungkan kembali.
Konfigurasi dari mikrokontroler PICAXE-40X2 adalah sebagai berikut:
Gambar II.2. Konfigurasi pin PICAXE-40X2
Pin Nama Keterangan
1 Reset Untuk me-reset mikrokontroler
2-5, 8-10 ADC 0-7 Sebagai masukan analog
6-7 Serial Untuk serial input dan output data serial
11, 32 +5V Tegangan 5V
12, 31 0V Tegangan 0V atau ground
13, 14 Resonator Untuk memasang Kristal eksternal 15-18, 23-26 C0-C7 Sebagai pin I/O
19-22, 27-30 D0-D7 Sebagai pin I/O
33-40 B0-B7 Sebagai pin I/O
Dari tabel di atas ada beberapa dari pin I/O yang bisa difungsikan untuk input atau output data serial, pengaturan PWM dan lain-lain.
2.3.2 Modul GPS
Gambar II.3. GPS EM-411
2.3.2.1Pengertian GPS
GPS adalah singkatan dari Global Positioning System yang merupakan sistem untuk menentukan posisi dan navigasi secara global dengan menggunakan satelit. Sistem ini pertama kali dikembangkan oleh Departemen Pertahanan Amerika yang digunakan untuk kepentingan militer maupun sipil (survey dan pemetaan).
satelit, pengontrol dan penerima/pengguna. Satelit GPS yang mengorbit bumi, dengan orbit dan kedudukan yang tetap, seluruhnya berjumlah 24 buah dimana 21 buah aktif bekerja dan 3 buah sisanya adalah cadangan.
2.3.2.2Penentuan Posisi Dengan GPS
Pada dasarnya penentuan posisi dengan GPS adalah pengukuran jarak secara bersama-sama ke beberapa satelit (yang koordinatnya telah diketahui) sekaligus. Untuk menentukan suatu titik di bumi, receiver setidaknya membutuhkan 4 satelit yang sinyalnya dapat ditangkap dengan baik. Secara default posisi atau koordinat yang diperoleh mengacu ke global datum yaitu World Geodetic System.
Secara garis besar penentuan posisi dengan GPS ini dibagi menjadi dua metode yaitu metode absolut dan metode relatif.
a. Metode absolut atau juga dikenal sebagai point positioning, menentukan posisi hanya berdasarkan pada 1 pesawat penerima (receiver) saja. Ketelitian posisi dalam beberapa meter (tidak berketelitian tinggi) dan umumnya hanya diperuntukan bagi keperluan navigasi.
b. Metode relatif atau sering disebut differential positioning, menentukan posisi dengan menggunakan lebih dari sebuah receiver. Satu GPS dipasang pada lokasi tertentu di muka bumi dan secara terus menerus menerima sinyal dari satelit dalam jangka waktu tertentu dijadikan sebagai acuan bagi yang lainnya. Metode ini menghasilkan posisi dengan ketelitian tinggi dan diaplikasikan untuk keperluan survey geodesi ataupun pemetaan yang memerlukan ketelitian tinggi.
2.3.2.3Sistem Koordinat GPS
koordinat yang dipakai oleh GPS maupun pemetaan yaitu: sistem koordinat global yang biasa disebut sebagai koordinat geografi dan sistem koordinat di dalam proyeksi.
a. Koordinat geografi diukur dalam lintang dan bujur dalam besaran derajat desimal, derajat menit desimal, atau derajat menit detik. Lintang diukur terhadap equator sebagai titik nol (00 sampai 900 positif kearah utara dan 00 sampai 900 negatif kearah selatan). Bujur diukur berdasarkan titik nol di Greenwich (00 sampai 1800 ke arah timur dan 00 sampai 1800 kearah barat).
b. Koordinat dibidang proyeksi merupakan koordinat yang dipakai pada sistem proyeksi tertentu. Umumnya berkaitan erat dengan sistem proyeksinya, walaupun adakalanya koordinat geografi digunakan dalam bidang proyeksi. Beberapa sistem proyeksi yang lazim digunakan di Indonesia diantaranya adalah proyeksi merkator, transverse merkator universal transverse merkator, kerucut konformal. Masing-masing sistem tersebut memiliki kelebihan dan kekurangan, dan pemilihan proyeksi umumnya didasarkan pada tujuan peta yang akan dibuat. Dari beberapa sistem proyeksi tersebut, proyeksi transverse merkator dan universal transverse merkator-lah yang banyak digunakan di Indonesia.
Berbicara mengenai sistem koordinat dalam bidang proyeksi tidak dapat terlepas dari datum yang digunakan. Ada dua macam datum yang umum digunakan dalam perpetaan yaitu datum horizontal dan datum vertikal. Datum horizontal dipakai untuk menentukan koordinat peta (X,Y), sedangkan datum vertikal untuk menentukan elevasi (peta topografi) ataupun kedalaman (peta bimetri). Perhitungan dilakukan dengan transformasi matematis tertentu.
2.3.2.4Protokol NMEA 0183
berbagai perlengkapan navigasi agar dapat berkomunikasi satu sama lain melalui koneksi serial RS-232 atau emusinya (misalnya USB port). NMEA menggunakan file data ASCII dalam pentransmisian sistem informasi GPS dari receiver ke hardware yang berfungsi sebagai input dari posisi dan merupakan realtime untuk navigasi dibidang kelautan. Salah satu aplikasi protokol ini adalah pada komunikasi data GPS.
Parameter yang digunakan oleh protokol ini adalah sebagai berikut :
a. Baudrate : 4800 kalimat laporan yang dikeluarkan oleh GPS receiver, standar NMEA memiliki banyak jenis bentuk kalimat laporan diantaranya yang paling penting adalah koordinat lintang (latitude), bujur (longitude), ketinggian (altitude), waktu sekarang standar UTC (UTC Time) dan kecepatan (speed over ground).
Berikut ini adalah jenis kalimat NMEA 0183:
a. $GPGGA (Global Positioning System Fixed Data) b. $GPGLL (Geographic –Latitude/Longitude) c. $GPGSA (GNSS DOP and Aktive Satelites) d. $GPGSV (GNSS Satelite In View)
Setiap data diawali dengan karakter “$” dan diakhiri dengan <CR><LF>. Pada prakteknya tidak semua data dengan header ini diambil, hanya yang menyangkut waktu, garis lintang dan garis bujur untuk posisi pengguna.
2.3.3 Sensor Kompas HM55B
Kompas adalah alat yang menunjukan arah mata angin, yaitu utara, selatan, barat, dan timur. Kompas hitachi HM55B merupakan salah satu kompas digital yang dikembangkan oleh parallax yang mempunyai keluaran digital sebanyak 2 axis yaitu axis X dan axis Y. Kompas ini memeiliki regulator internal yang mengubah tegangan menjadi 3V dan itu merupakan daerah kerja kompas ini. Pada saat program dijalankan, kecepatan sensitivitas 30-40 ms. Dengan mikrokontroler memudahkan menampilkan arah dalam format 3600. Berikut ini adalah tampilan dan konfigurasi pin kompas hitachi HM55B.
(a) (b)
Gambar II.4. (a) bentuk fisik kompas HM55B (b) konfigurasi pin kompas HM55B
2.3.4 Motor DC Brushless dan ESC (Electronic Speed Control)
2.3.4.1Motor DC Brushless
yang cukup besar dibandingkan dengan motor DC biasa. Motor DC brushless pada payload digunakan sebagai navigasi payload untuk bergerak.
Gambar II.5. Motor DC Brushless
2.3.4.2ESC (Electronic Speed Control)
Motor brushless memiliki sebuah ESC (Elektronic Speed Control) yang berfungsi sebagai pengatur kecepatan motor, selain itu juga berfungsi untuk menaikan jumlah arus yang diperlukan oleh motor. Kecepatan untuk motor yang keluar dari ESC diatur melalui pulsa dari mikrokontroler.
Gambar II.6. ESC (Electronic Speed Control)
2.3.5 Catu Daya
Gambar II.7. Baterai Lipo (Lithium Polymer)
2.3.6 Propeller
Propeller merupakan suatu benda yang digunakan untuk menghasilkan daya dorong. Untuk menghasilkan daya dorong tersebut maka propeller dapat diputarkan oleh sebuah motor. Di bawah ini merupakan contoh gambar dari propeller.
Gambar II.8. Propeller
2.3.7 Komunikasi Radio
Modul YS-1020U wireless Data Transciever dapat mengirimkan dan menerima data serial melalui media udara, degan frekuensi 433 MHz ISM band dan baud rate air sebesar 9600bps. Penggunaan modul tersebut sangat praktis karena dari segi ukuran cukup kecil dan langsung dapat dihubungkan dengan RS232. Modul radio YS-1020U memiliki 9 pin dan diantara pin tersebut ada yang digunakan untuk mengoperasikan modul radio tersebut. Di bawah ini merupakan contoh dari modul radio.
Gambar II.9. Modul radio YS-1020
Radio ini dapat bekerja secara maksimal jika diuji atau digunakan pada area terbuka dan tidak terdapat penghalang yang dapat menggangu sinyal frekuensinya. Di bawah merupakan tabel konfigurasi dari pin radio tersebut.
Tabel II.2. Tabel konfigurasi pin modul radio
PIN NAMA PIN FUNGSI LEVEL
1 GND Ground
2 VCC Tegangan input +3,3 - 5,5V
3 RXD/TTL Input serial data TTL
4 TXD/TTL Output serial data TTL
5 DGND Digital grounding
6 A(TXD) A of RS-485 or TXD of RS-232 7 B(RXD) B of RS-485 or RXD of RS-232
8 SLEEP Sleep control (input) TTL
9 RESET Reset (input) TTL
2.3.8 Teori Dasar Kendali PID
kesalahan. Aksi kontrol PID pada dasarnya bertujuan untuk menggabungkan kelebihan komponen-komponen dasar kontrol PID diantaranya:
a. Kontrol proporsional: berfungsi untuk mempercepat respon.
b. Kontrol integral: berfungsi untuk menghilangkan error steady.
c. Kontrol derivatif: berfungsi untuk memperbaiki sekaligus mempercepat respon transien.
Dalam hal ini output yang dikendalikan adalah kestabilannya, ketelitian dan kedinamisannya. Secara umum, sistem kendali dapat dibedakan menjadi dua jenis yaitu:
1. Sistem kendali loop terbuka
2. Sistem kendali loop tertutup
2.3.8.1Sistem Kendali Loop Terbuka
Sistem kendali loop terbuka, keluarannya tidak mempengaruhi masukan, atau dengan kata lain sistem kendali loop terbuka output-nya tidak dapat digunakan sebagai perbandingan umpan balik dengan input-nya. Akibatnya ketetapan dari sistem tergantung dari kalibrasi. Pada umumnya, sistem kendali loop terbuka tidak tahan terhadap gangguan dari luar. Di bawah ini adalah gambar diagram blok sistem kendali loop terbuka.
Gambar II.10. Kendali loop terbuka
Fungsi alih sistem kendali loop terbuka adalah:
2.3.8.2Sistem Kendali Loop Tertutup
Sistem kendali loop tertutup seringkali disebut sistem kendali umpan balik. Pada sistem kendali loop tertutup, sinyal kesalahan yang bekerja, yaitu perbedaan antara sinyal input dan sinyal umpan balik di-input-kan ke pengontrol sedemikian rupa untuk mengurangi kesalahan dan membawa keluaran sistem ke nilai yang dikehendaki. Pada umumnya sistem kendali loop tertutup tahan terhadap gangguan dari luar. Secara umum sistem kendali loop tertutup ini dibagi menjadi dua jenis, yaitu:
a. Sistem kendali kontinu b. Sitsem kendali diskrit
Secara umum gambar sistem kendali loop tertutup adalah sebagai berikut:
Gambar II.11. Kendali loop tertutup
Fungsi alih diskrit sistem kendali loop tertutup adalah:
(II.2)
2.4 Perangkat Lunak Picaxe Programming Editor
Berikut merupakan jendela PICAXE Programming Editor pada saat dioperasikan:
Gambar II.12. Programming Editor pada saat dijalankan
Ketika aplikasi dioperasikan maka tampilan akan seperti gambar di atas. Setelah itu lakukan pemilihan tipe chip yang dipakai kemudian periksa koneksi chip dengan aplikasi apakah terhubung atau tidak.
Gambar II.13. Lembar kerja tekstual
Gambar II.14. Lembar kerja grafichal (Flowchart)
Pada lembar kerja tersebut kita dapat membuat sebuah pogram dengan menggunakan flowchart. Setelah program selesai dibuat maka kita dapat men-download program tersebut ke chip PICAXE dengan cara mengklik tombol download atau F5 atau dengan cara memilih menu PICAXE kemudian klik menu Program. Di bawah ini tampilan jendela pada saat program di download ke chip PICAXE.
20
9. Motor DC Brushless 1 10. Motor DC Brushless 2
11. Catu Daya
Gambar III.1. Diagram blok sistem
Keterangan:
7. ESC1 (Electronic Speed Control) 8. ESC2 (Electronic Speed Control) 9. Motor DC brushless 1
3.1.2 Penjelesan Diagram Blok Sistem
1. Mikrokontroler PICAXE40-X2 berfungsi sebagai unit kontrol yang akan mengontrol semua perangkat yang ada pada payload dan untuk mengontrol pergerakan payload.
2. Photo transistor berfungsi sebagai pendeteksi cahaya, untuk menentukan apakah payload sudah separasi atau belum.
3. GPS (global positioning system) berfungsi untuk mengetahui posisi payload dan untuk dijadikan acuan payload untuk bergerak menuju ke home.
4. Modul radio komunikasi berfungsi sebagai komunikasi antara payload dan ground segment yang akan melakukan pertukaran data selama payload bekerja.
5. Servo1 berfungsi sebagai penggerak sayap sebelah kiri. 6. Servo2 berfungsi sebagai penggerak sayap sebelah kanan.
7. ESC1 (electronic speed control) berfungsi sebagai driver dari motor DC brushless yang akan menggerakan motor brushless sebelah kiri.
8. ESC2 (electronic speed control) berfungsi sebagai driver dari motor DC brushless yang akan menggerakan motor brushless sebelah tengah atau ekor.
9. Motor DC brushless1 berfungsi sebagai penggerak propeller sebelah kiri yang akan menggerakan payload.
10. Motor DC brushless2 berfungsi sebagai penggerak propeller sebelah tengah atau ekor yang akan menggerakan payload.
3.2 Perancangan Perangkat keras
3.2.1 Perancangan Mekanik
3.2.1.1Bentuk
Untuk dapat bekerja secara maksimal, sebuah payload harus memiliki bentuk struktur mekanik yang sesuai dengan medan yang akan dilalui. Maka dari itu dibuat suatu bentuk payload yang sesuai dengan kebutuhan. Adapun gambar mekanik yang dibuat buat adalah sebagai berikut:
Gambar III.2. Desain payload 2D
3.2.1.2Dimensi
Adapun untuk ukuran atau dimensi payload, mengacu kepada ketentuan ukuran standar kompartemen roket. Adapun ukuran yang telah ditentukan tersebut adalah:
Tinggi : 200 mm (20 cm)
Diameter : 100 mm (10 cm)
3.2.1.3Bahan Mekanik dan Desain 3D
Dalam perancangan payload, pemakaian bahan dari teplon dan alumunium. Karena kedua bahan tersebut memiliki daya tahan yang kuat, memiliki berat massa yang ringan dan tahan terhadap magnet. Sehingga tidak akan mengganggu kerja sensor yang nantinya akan mempengaruhi pergerakan payload. Adapun untuk gambar 3 dimensi payload yang dirancang adalah sebagai berikut:
Gambar III.3. Desain payload 3D
3.2.2 Perancangan Sistem Minimum
3.2.2.1Jenis Mikrokontroler yang dipilih
Mikrokontroler yang dipilih untuk perancangan payload ini adalah mikrokontroler berjenis PIC dengan tipe PIC18F4520 yang telah ditanam bootloader oleh PICAXE sehingga PIC ini sering disebut dengan PICAXE40-X2 dan telah terintegrasi dengan software editornya. PIC PIC18F4520 dengan bootloader sangat berbeda dengan PIC PIC18F4520 yang belum ditanam bootloader, jika PIC PIC18F4520 yang belum ditanam bootloader dihubungkan ke programming editor maka PIC tersebut tidak terkoneksi.
internal, mendukung i2c dan mempunyai kecepatan 4x lebih cepat dibandingkan dengan mikrokontroler lain.
3.2.2.2Rangkaian Sistem Minimum
Untuk rangkaian sistem minimum mikrokontroler yang dipakai, rangkaiannya sangat sederhana. Untuk pengiriman data serial dari komputer mikrokontroler ini hanya menggunakan 3 buah resistor. Ini berarti selain lengkap dengan fiturnya, mikrokontroler ini juga dilengkapi dengan rangkaian yang sangat sederhana. Adapun gambar rangkaian sistem minimum yang dibuat adalah sebagai berikut:
Gambar III.4. Rangkaian sistem minimum
3.2.2.3I/O yang dipakai dan Deskripsi Pin
Tabel III.1. Tabel pin I/O yang digunakan
No. Pin Alias Digunakan Untuk
1 Reset Mereset mikrokontroler
2 ADC0/A.0 Photo transistor
3 ADC1/A.1
4 ADC2/A.2
5 ADC3/A.3
6 Serial In Penerima data dari Komputer (download)
7 Serial Out/A.4 Mengirin data ke Komputer (Debug)
8 ADC5/A.5
9 ADC6/A.6
10 ADC7/A.7
11 +V Sebagai masukan tegangan positif
12 0V Sebagai ground
13 Resonator Tambahan crystal external
14 Resonator Tambahan crystal external
15 Tmr Clk/C.0 Clk kompas
16 Pwm C.1/C.1 17 Hpwm/Pwm C.2/C.2 18 Hi2c scl/hspi sck/C.3
19 D.0 En
20 D.1 Din/DOut
21 D.2 Serin GPS
22 D.3
3.2.3 Sensor
3.2.3.1GPS (Global Positioning System)
GPS merupakan sebuah sensor untuk mendeteksi lokasi dengan mengacu kepada titik koordinat bumi. Selain itu GPS juga dapat mengetahui data waktu. Dalam perancangan ini menggunakan GPS yang nantinya akan berfungsi sebagai acuan payload untuk bergerak menuju home. Maka dari itu penulis menggunakan GPS untuk navigasinya. GPS receiver yang dipakai pada sistem ini adalah GPS modul engine EM-411. GPS ini memiliki 6 buah pin. Di bawah ini adalah gambar GPS engine EM-411.
Gambar III.5. GPS EM-411
Berikut ini merupakan tabel yang menjelaskan konfigurasi pin-pin pada GPS-EM411.
Tabel III.2. Konfigurasi pin GPS
Pin Nama Pin Fungsi
1 GND Ground
2 Vcc Tegangan input 4.5 V - 6.5 V sebagai DC input 3 TX Chanel pengirim dari keluaran navigasi
4 RX Chanel penerima untuk menerima pesan ke software
5 GND Ground
GPS akan mengeluarkan data dengan format NMEA, NMEA 0138 merupakan data yang dipakai dalam peracangan sistem ini. NMEA 0813 berisi informasi yang berhubungan dengan geografi seperti waktu, longitude, latitude, ketinggian, kecepatan, dan masih banyak lagi. Standar NMEA 0813 menggunakan format ASCII sederhana, masing-masing kalimat mendefinisikan masing-masing tipe pesan yang dapat dipilah-pilah.
NMEA 0183 memiliki bermacam-macam tipe kalimat, salah satunya adalah RMC (Recomended Minimum Navigation Information). Data inilah yang dipakai penulis untuk dijadikan acuan payload bergerak menuju ke home. NMEA tipe RMC ini mengeluarkan data sebagai berikut.
$GPRMC,065102,A,0745.6301,S,11024.5308,E,000.0,006.2,030306,001. 0,E*65<CR+LF>
Tabel III.3. Format keluaran data GPS header $GPRMC
Nama Contoh Keterangan
Message ID $GPRMC RMC protokol header
UTC Position 065102 hhmmss.ss
Status A A=data valid or V=dta tidak valid
Latitude 0745.6301 ddmm.mmmm
N/S Indicator S N=north or S=south
Longitude 11024.5308 dddmm.mmmm
E/W Indicator E E=east or W=west
Speed Over Ground 000.0 (knot) Course Over Ground 066.2 (degree)
Date 030306 Ddmmyy
Magnetic Variation E E=east or W=west
Checksum *65
CR LF End of message termination
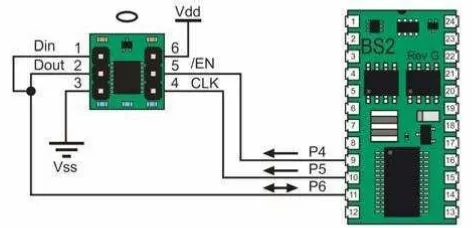
3.2.3.2Kompas Hitachi HM55B
yang dikembangkan oleh parallax yang mempunyai keluaran digital sebanyak 2 axis yaitu axis X dan axis Y. Dalam perancangan ini kompas digunakan untuk menentukan arah tujuan payload, adapun cara pemasangan kompas HM55B ke mikrokontroler tersebut adalah sebagai berikut:
Gambar III.6. Konfigurasi kompas
3.2.3.3Servo
Sebuah motor servo adalah perangkat yang dapat mengendalikan posisi, dapat membelokkan dan menjaga suatu posisi berdasar penerimaan pada suatu sinyal elektronik. Motor servo merupakan sebuah motor DC yang diberi sistem gear.
Gambar III.7. Servo
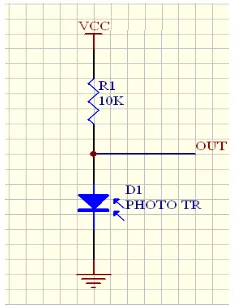
3.2.3.4Photo Transistor
Photo transistor bentuknya hampir sama dengan LED. Maka dari itu penggunaan photo transistor pada payload ini tidak akan menghabiskan banyak tempat.
Untuk dapat bekerja photo transistor harus dilengkapi dengan komponen elektronika lainnya. Di bawah ini merupakan gambar rangkaian dari photo transistor.
Gambar III.8. Rangkaian phototransistor
Karena dalam perancangan ini penulis menggunakan ADC Internal maka untuk pembacaan sensor Photo transistor ini akan langsung masuk ke mikrokontroler. Data yang dikeluarkan oleh photo transistor itu berupa tegangan dan natinya akan dikonversi ke digital dengan menggunakan ADC internal pada mikrokontroler.
3.2.4 ESC (Electronic Speed Control)
Gambar III.9. ESC (Electronic Speed Control)
3.2.5 Motor
Agar payload dapat bergerak secara normal maka penulis menggunakan motor yang mempunyai torque yang besar, salah satu motor yang mempunyai torque yang besar adalah Motor DC Brushless. Tipe yang dipakai adalah motor DC brushless 1800KV. Di bawah ini merupakan gambar dari motor DC brushless.
Gambar III.10. Motor DC brushless
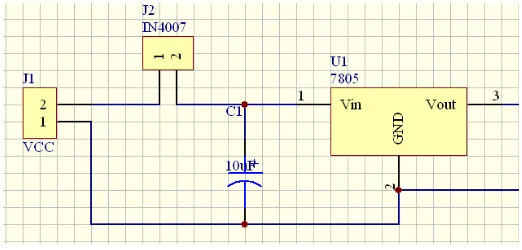
3.2.6 Catu Daya
Sumber tegangan atau catu daya memegang peranan yang sangat penting dalam hal perancangan sebuah payload. Tanpa bagian ini payload tidak akan berfungsi. Begitu pula dengan pemilihan sumber tegangan yang tidak tepat, maka payload tidak akan bekerja dengan baik.
1. Tegangan
Setiap aktuator atau motor tidak memiliki tegangan yang sama. Hal ini akan berpengaruh terhadap desain catu daya. Tegangan tertinggi dari salah satu aktuator akan menetukan nilai tegangan catu daya.
2. Arus
Arus memiliki satuan Ah (Ampere-hour). Semakin besar Ah, semakin lama daya tahan baterai bila digunakan pada beban yang sama.
3. Teknologi Baterai
Baterai isi ulang ada yang dapat diisi kapan saja, dan ada pula yang harus diisi ulang sebelum batas tegangan minimum.
Baterai yang digunakan pada payload ini adalah baterai berjenis Lythium Polymer. Hal ini karena jenis baterai Lythium Polymer merupakan jenis baterai yang dapat diisi ulang. Baterai ini memiliki tegangan kerja 11,1 Volt. Berikut ini adalah contoh sebuah baterai Lipo 2200 mAh.
Gambar III.11. Baterai Lipo
Untuk pengisian baterai ini dapat dilakukan sebelum kurang dari tegangan minimum.
Gambar III.12. Rangkaian regulator
3.2.7 Modul Komunikasi
Konektor pada komputer yaitu DB-9 akan mengeluarkan data dengan level tegangan RS232, sehingga membutuhkan IC jika komunikasi menggunakan tegangan TTL. IC Max232 berfungsi untuk mengubah tegangan dari TTL menjadi level RS232. Sehingga komputer dapat berkomunikasi dengan payload.. Berikut merupakan skematik RS232:
Gambar III.13. Skematik Max232
3.2.8 Komunikasi Serial
Proses pengiriman data dari mikrokontroler ke ground segment menggunakan modul radio. Adapun modul radio yang digunakan dalam perancangan payload ini adalah modul radio dengan tipe YS-1020U. Modul ini mempunyai jarak jangkauan sekitar 800 m, kondisi ini sudah bisa memenuhi kebutuhan payload. Adapun gambar dari modul YS-1020U adalah sebagai berikut.
Gambar III.14. Modul radio YS-1020U
3.3 Perancangan Software
3.3.1 Algoritma Payload Secara Umum
Perancangan algoritma merupakan salah satu tahap penting dalam perancangan sistem kendali. Maka dari itu penulis membuat rancangan algoritma secara umum untuk mengendalikan payload. Adapun rancangan algoritma yang telah penulis buat adalah sebagai berikut:
Mulai
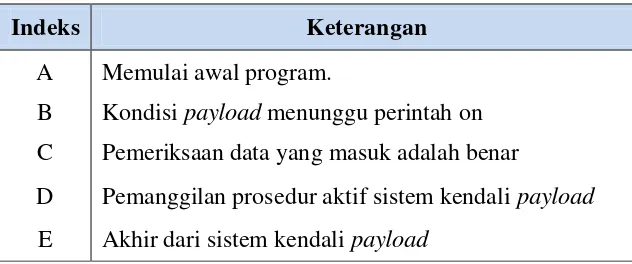
Adapun keterangan dari flowchart di atas adalah sebagai berikut:
Tabel III.4. Penjelasan flowchart kerja payload secara umum
Indeks Keterangan
A Memulai awal program.
B Kondisi payload menunggu perintah on C Pemeriksaan data yang masuk adalah benar
D Pemanggilan prosedur aktif sistem kendali payload E Akhir dari sistem kendali payload
3.3.2 Algoritma Pengendalian Payload
Payload Aktif
Arah saat ini = arah tujuan?
h
posisi saat ini = posisi tujuan?
l
T
Baca Posisi
m
Adapun keterangan dari flowchart di atas adalah sebagai berikut:
Tabel III.5. Penjelasan flowchart prosedur sistem payload
Indeks Keterangan
A Awal dari prosedur B Pengiriman data posisi
C Proses pemeriksaan kondisi sparasi D Penyeleksian kondisi sparasi E Pemanggilan prosedur baca posisi
F Penerimaan data set point dari ground segment G Pembacaab arah saat ini oleh sensor kompas H Pemanggilan prosedur pengendalian payload I Penyeleksian kondisi arah saat ini dan tujuan J Pendorong payload aktif
K Pemanggilan prosedur kendali payload L Pembandingan posisi saat ini dengan tujuan M Kembali ke sistem utama
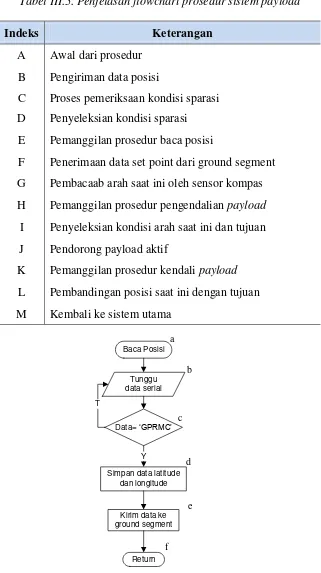
Baca Posisi
Adapun keterangan dari flowchart di atas adalah sebagai berikut:
Tabel III.6. Penjelasan flowchart prosedur baca posisi
Indeks Keterangan
A Awal dari prosedur
B Kondisi payload menunggu data serial dari GPS
C Pemeriksaan data yang masuk dengan header “GPRMC”
D Penyimpanan data ke variable E Pengiriman data ke ground segment F Kembali ke sub system
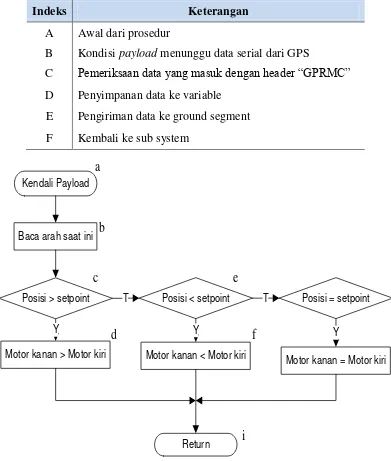
Kendali Payload
Baca arah saat ini
Posisi > setpoint Posisi < setpoint Posisi = setpoint
Motor kanan > Motor kiri Motor kanan < Motor kiri Motor kanan = Motor kiri
Return
Adapun keterangan dari flowchart diatas adalah sebagai berikut:
Tabel III.7. Penjelasan flowchart prosedur kendali payload
Indeks Keterangan
A Awal dari prosedur
B Pembacaan arah payload saat ini
C Pengecekan kondisi jika arah lebih besar dari set point D Pergerakan motor
E Pengecekan kondisi jika arah lebih kecil dari set point F Pergerakan motor
G Pengecekan kondisi jika arah sama dengan dari set point H Pergerakan motor
I Kembali ke sub system
3.3.3 Deklarasi Variabel dan Tipe Data yang dipakai
Dalamperancangan program harus terdapat deklarasi variabel yang nantinya akan berguna sebagai tempat penyimpanan data. Untuk penggunaan tipe data pada variabel ditentukan oleh data yang diterima dari masukan, misalnya seperti sensor. Suatu variabel tidak bisa menyimpan semua jenis nilai/data, melainkan hanya satu jenis tipe saja. Berikut adalah deklarasi variabel dan tipe data yang dipakai dalam perancangan payload:
Tabel III.8. Tipe data yang digunakan
Deklarasi variabel Tipe Data
3.3.4 Perancangan Interface VB
Untuk memudahkan dalam pengendalian payload dan pengiriman data maka dalam perancangan ini dirancang sebuah ground segment. Adapun perancangan interface ground segment terdiri dari navigasi, letak posisi, data hasil pengukuran, serta posisi payload dalam grafik koordinat. Adapun bentuk interface dirancang dari software VB, di bawah ini contoh dari interface ground segment.
A
Gambar III.19. Interface ground segment
Tabel III.9. Penjelasan interface ground segment
K Tombol aktif system payload
L Indikator kompas
M Timer aktif
N Indikator
O Open Port
P Indikator
Q List data serial yang masuk
3.3.5 Perancangan DFD
Autonomous payload
User Payload
ON, aktif motor, standby, reset kec. motor, off motor, simpan manual
ON, aktif motor, standby, reset kec. motor, off motor, simpan manual
ON, aktif motor, standby, reset kec. motor, off motor, simpan manual
ON, aktif motor, standby, reset kec. motor, off motor, simpan manual
Data GPS, kompas Data GPS, kompas
42
4.1 Tujuan Pengujian
Untuk mengetahui dan mengukur fungsionalitas, kehandalan dan keberhasilan suatu sistem yang telah dibuat, hal tersebut dapat diketahui dengan melakukan pengujian terhadap alat tersebut. Adapun pengujian yang penulis lakukan untuk menguji alat tersebut adalah sebagai berikut:
4.1.1 Pengujian Hardware Secara Modular
Adapun hal-hal yang dilakukan dalam pengujian hardware secara modular adalah sebagai beikut:
A. Pengujian GPS
Pengujian GPS dilakukan untuk memastikan bahwa GPS telah bekerja dengan baik, karena hal ini akan mempengaruhi pada pergerakan payload karena jika pembacaan data dari GPS error maka pergerakan payload tidak dapat diketahui posisinya dengan benar. Data hasil dari pengujian GPS adalah sebagai berikut:
Tabel IV.1. Data hasil pengujian GPS
Lokasi Latitude Longitude Cuaca
Dipati Ukur 0653.1991 10736.9119 Cerah
Dipati Ukur 0653.1989 10736.9120 Mendung
Dipati Ukur - - Hujan
Taman Sari 0653.7903 10736.5199 Cerah
Taman Sari 0653.7921 10736.5196 Mendung
Taman Sari - - Hujan
Gasibu 0654.0008 10737.1224 Cerah
Gasibu 0654.0010 10737.1226 Mendung
Dago 0651.8024 10737.1372 Cerah
B. Pengujian Kompas HM55B
Pengujian sensor kompas dilakukan untuk memastikan bahwa kompas telah bekerja dengan baik, karena hal ini akan berpengaruh pada pergerakan payload karena jika pembacaan data dari kompas error maka pergerakan payload tidak akan sempurna dan sulit untuk dikendalikan. Data hasil dari pengujian kompas adalah sebagai berikut:
Tabel IV.2. Data hasil pengujian sensor kompas
Kompas HM55B Kompas Analog Error
C. Pengujian Motor Brushless
Pengujian ini dilakukan untuk menguji berapa pulsa yang harus dikeluarkan untuk dapat memutarkan motor. Adapun data di bawah ini adalah hasil dari pengujian motor brushless:
Tabel IV.3. Data hasil pengujian motor brushless
Pulsa yang keluarkan Kecepatan Keterangan
0 Berhenti -
1100 Berhenti Digunakan untuk inisialisasi
1150 Rendah Untuk putaran rendah
1500 Sedang -
2000 Tinggi Kecepatan penuh
D. Pengujian transmisi data melalui frekuensi radio
Pengujian ini dilakukan untuk mengetahui apakah komunikasi payload dengan ground segment berhasil dengan jarak yang berbeda, kecepatan dan format data yang digunakan dengan baudrate 9600bps, no parity, 8 bit, 1 stop bit (9600, n, 8, 1). Adapun data hasil pengujian transmisi data melalui radio adalah sebagai berikut:
Tabel IV.4. Data hasil pengujian transmisi data melalui radio
Data latitude Data longitude Jarak (m) Keterangan
0653.1992 10736.9125 100 Berhasil
0653.1985 10720.9119 200 Berhasil
0653.1988 10704.9117 300 Berhasil
E. Pengujian akurasi GPS
Pengujian ini dilakukan untuk mengetahui keakuratan data GPS. Pengujian ini dilakukan dengan cara membandingkan data GPS EM-411 dengan modul GPS yang akurat. Adapun data hasil pengujian akurasi GPS adalah sebagai berikut:
Tabel IV.5. Data hasil uji akurasi (latitude)
Lokasi Data GPS EM411 GPS Error
Dipati Ukur 0653.1991 0653.1890 0.0101
Dipati Ukur 0653.1989 0653.1890 0.0099
Taman Sari 0653.7903 0653.7900 0.0003
Taman Sari 0653.7907 0653.7900 0.0007
Dago 0651.8024 0651.8028 0.0004
Dago 0651.8018 0651.8028 0.0010
Gasibu 0654.0008 0654.0010 0.0002
Gasibu 0654.0010 0654.0010 0.0000
Tabel IV.6. Data hasil uji akurasi (longitude)
Lokasi Data GPS EM411 GPS Error
Dipati Ukur 10736.9119 10736.9119 0.0000
Dipati Ukur 10736.9120 10736.9119 0.0001
Taman Sari 10736.5199 10736.5199 0.0000
Taman Sari 10736.5197 10736.5199 0.0002
Dago 10737.1372 10737.1375 0.0003
Dago 10737.1370 10737.1375 0.0005
Gasibu 10737.1223 10737.1230 0.0007
Tabel IV.7. Data hasil uji ketelitian GPS dalam satuan meter
Jarak (meter) Data GPS EM411
0-10 0654.0007 10737.1223
Dari tabel di atas terdapat perubahan data setiap pergerakan 10 m, dari data diatas maka GPS masih dapat digunakan karena mengacu pada rule komurindo 2011, bahwa payload yang berhasil homing yaitu payload yang berhasil mendarat di radius 50m dari titik peluncuran.
F. Pengujian catu daya
Catu daya berfungsi meregulasi tegangan output dari baterai dan memberikan supply daya ke berbagai blok sistem rangkaian sesuai kebutuhan. Pengujian dilakukan dengan mengukur output pada IC regulator menggunkan alat ukur multimeter. Adapun data hasil pengujian catu daya adalah sebagai berikut:
Tabel IV.8. Data hasil pengujian catu daya
Gambar IV.1. Rangkaian catu daya 5V dan 9V
4.1.2 Pengujian Terintegerasi
Adapun hal-hal yang dilakukan dalam pengujian terintegrasi adalah sebagai berikut:
A. Pengujian telecomand
Pengujian telecommand dilakukan untuk menguji bahwa perintah-perintah yang dikirim dari PC dapat diterima oleh payload kemudian akan melakukan sesuai perintah yang dikirimkan. Dalam pengujian ini akan dinilai berapa kali pengiriman perintah ke payload sampai payload berjalan sesuai perintah. Adapun data dari hasil pengujian adalah sebagai berikut:
Tabel IV.9. Data hasil pengujian telecomand (9600, n, 8, 1)
Data yang dikirim Aksi Banyak pengiriman
“A” Aktif Telemetri 15
“B” Menjalankan Motor 15
“C” Mematikan Motor 15
“D” Membuka Sayap 15
B. Pengujian telemetri
Tabel IV.10. Data hasil pengujian telemetri (9600, n, 8, 1)
Data latitude-longitude yang diterima Jarak (m) Keterangan
0653.1991 10736.9119 100 Berhasil
0653.7903 10736.5199 200 Berhasil
0651.8024 10737.1372 300 Berhasil
0651.8024 10737.1372 400 Berhasil
C. Uji Floating
Pengujian ini dimaksudkan untuk menguji data yang dihasilkan dari GPS menjadi data koordinat pada softwareground segment.
Gambar IV.2. Floating pada software ground segment
D. Uji Akurasi
Pengujian ini dimaksudkan untuk menguji keakuratan data hasil pengukuran GPS dengan cara membandingkan dengan software Visual GPS.
4.2 Analisa
Dari data hasil pengujian di atas maka penulis melakukan analisis untuk mengetahui apakah kualitas dan tujuan dari alat tersebut telah tercapai atau tidak. Untuk mengetahui apakah alat tersebut telah sesuai dengan tujuan maka penulis menganalisa data tersebut menggunakan pembanding. Adapun analisa yan penulis lakukan adalah sebagai berikut:
4.2.1 Analisa hasil pengambilan data oleh sensor
A. Analisa pada GPS
Tabel IV.11. Data hasil analisa (latitude)
Lokasi Data GPS EM411 GPS Error
Dipati Ukur 0653.1991 0653.1890 0.0101
Dipati Ukur 0653.1989 0653.1890 0.0099
Taman Sari 0653.7903 0653.7900 0.0003
Taman Sari 0653.7907 0653.7900 0.0007
Dago 0651.8024 0651.8028 0.0004
Dago 0651.8018 0651.8028 0.0010
Gasibu 0654.0008 0654.0010 0.0002
Gasibu 0654.0010 0654.0010 0.0000
Tabel IV.12. Data hasil analisa (longitude)
Lokasi Data GPS EM411 GPS Error
Dipati Ukur 10736.9119 10736.9119 0.0000
Dipati Ukur 10736.9120 10736.9119 0.0001
Taman Sari 10736.5199 10736.5199 0.0000
Taman Sari 10736.5197 10736.5199 0.0002
Dago 10737.1372 10737.1375 0.0003
Dago 10737.1370 10737.1375 0.0005
Gasibu 10737.1223 10737.1230 0.0007
B. Analisa pada sensor kompas HM55B
Tabel IV.13. Data hasil pengujian kompas
Kompas HM55B Kompas Analog Error
0 0 0
Dari hasil pengujian perbandingan antara kompas HM55B dengan kompas analog terdapat sedikit perbedaan dengan rata-rata error sebesar 2,875 0. Konidisi tersebut masih dapat dijadikan acuan kendali payload.
4.2.2 Analisa auotonomous payload
tersebut akan menghasilkan sebuah arah sudut tujuan yang akan dituju serta dapat mengetahui letak payload tersebut.
Adapun analisa perhitungan matematis berdasarkan data GPS tersebut adalah sebagai berikut:
Misal tempat asal suatu payload berada di koordinat 0653.1991, 10736.9119 dan tujuan payload tersebut di koordinat 0660.1000, 10740.5000, maka analisa kontrol untuk autonomus payload adalah sebagai berikut:
Menentukan sudut tujuan titik koordinat
0653.1991 = 6.5320 (Y1) 10736.9119 = 107.6391 (X1) 0660.1000 = 6.6010 (Y2) 10740.5000 = 107.4050 (X2)
Hasil dari perhitungan di atas dihasilkan –x dan y artinya sudut di atas berada pada kuadran IV. Jadi untuk mendapatkan sudut yang tepat maka dilakukan perhitungan sebagai berikut:
53
5.1 Simpulan
Berdasarkan uji coba dan analisis sistem yang telah dilaksanakan, maka dapat diperoleh beberapa simpulan, diantaranya:
1. Perancangan autonomous payload telah berhasil dilakukan, dilengkapi dengan GPS yang berfungsi untuk mengetahui titik koordinat suatu tempat, serta kompas yang dapat membantu menentukan arah tujuan.
2. Dari data hasil pengujian pada tabel IV.1, pembacaan data GPS dapat terganggu saat kondisi cuaca sedang hujan, hal tersebut disebabkan GPS sulit mendapatkan sinyal untuk menerima data dari satelit.
3. Beradasarkan hasil analisa autonomous payload, untuk dapat menentukan arah tujuan payload maka dipelukan suatu proses perhitungan terhadap data GPS yang diterima oleh ground segment.
4. Dari data hasil pengujian pada tabel IV.10, payload telah berhasil berkomunikasi dengan software ground segment, dan dapat menerima informasi dari payload serta dapat mengirim perintah ke payload dengan jarak jangkau maksimal 400m.
5.2 Saran
Hasil penelitian ini masih jauh dari kesempurnaan dan memiliki banyak kekurangan, karena itu perlu dilakukan studi lebih lanjut dalam proses perancangan untuk menghasilkan kontrol otomatis yang handal. Adapun saran-saran dari penulis yang dapat dijadikan sebagai bahan pertimbangan dalam penelitian autonomous payload berbasis GPS .
1. Penggunaan dua mikrokontroler dapat digunakan untuk mendapatkan transmisi data dengan cepat.
2. Pada pengolahan data GPS untuk autonomous payload baiknya bisa diproses langsung dalam mikroprosesor.
PERANCANGAN AUTONOMOUS PAYLOAD BERBASIS GPS
DAN MIKROKONTROLER PICAXE-40X2
(STUDI KASUS KORINDO 2010)
TUGAS AKHIR
Disusun untuk memenuhi syarat kelulusan pada
Program Studi Teknik Komputer Diploma Tiga di Jurusan Teknik Komputer
Oleh Subhan Rohiman
( 10808040)
Pembimbing Agus Mulyana, M.T.
JURUSAN TEKNIK KOMPUTER
FAKULTAS TEKNIK DAN ILMU KOMPUTER
UNIVERSITAS KOMPUTER INDONESIA
BANDUNG
Tempat, tanggal lahir : Garut, 1 Agustus 1989
Jenis kelamin : Laki-laki
Alamat : Kp/Ds. Salamnunggal rt/rw. 05/06
kec. Leles - Kab. Garut 44152
No. telepon : 085624721394
Email : [email protected]
Pendidikan Formal
2008 - 2011 : Universitas Komputer Indonesia, Bandung.
Fakultas Ilmu Komputer, Jurusan Teknik Komputer.
2004 - 2007 : SMK Hikmah Tarogong Garut. Jurusan T. Otomotif
2001 - 2004 : SLTP Negeri 1, Leles
1996 - 2001 : SD Negeri 17, Leles
Pengalaman Organisasi
2010 : Divisi Roket Universitas Komputer Indonesia
2010 : Asisten Lab.Elektronika Universitas Komputer
Indonesia
2011 : Asisten Instruktur Pengabdian pada Masyarakat “Cara Praktis Menggunakan Power Point dan Visual Basic”
2011 : Panitia SEMILOKA (Seminar Loka Karya) Nasional
Kurikulum D3 Teknik Komputer & S1 Sistem
55
[1] Varberg, Dale., Purcell, Edwin J., & Rigdon, Steven E., (2003). Kalkulus Edisi 8. Jakarta: Erlangga.
[2] Setiawan, Iwan., (2008). Kontrol PID untuk Proses Industri. Jakarta: PT.Gramedia.
[3] Suhata, ST., (2004). VB Sebagai Pusat Kendali Peralatan Elektronik. Jakarta: PT. Elex Media Komputindo.
iv
Segala puji bagi Allah SWT., Pencipta dan Pemelihara alam semesta, shalawat serta salam semoga terlimpah bagi Muhammad SAW., keluarga dan para pengikutnya yang setia hingga akhir masa.
Atas rahmat Allah SWT., akhirnya Penulis dapat menyelesaikan Tugas Akhir ini, meskipun proses belajar sesungguhnya tak akan pernah berhenti. Tugas Akhir ini sesungguhnya bukanlah sebuah kerja individual dan akan sulit terlaksana tanpa bantuan banyak pihak yang tak mungkin Penulis sebutkan satu persatu, namun dengan segala kerendahan hati, Penulis mengucapkan terima kasih kepada seleruh Dosen Teknik Komputer selama melaksanakan studi dan menyelesaikan Tugas Akhir ini.
Penyusunan Tugas Akhir ini tidak terlepas dari bantuan berbagai pihak sehingga pada kesempatan ini penulis ingin mengucapkan terimakasih kepada:
1. Ibu Sri Nurhayati, M.T., selaku Ketua Jurusan Teknik Komputer
2. Bapak Agus Mulyana, M.T., selaku pembimbing yang telah banyak memberikan arahan, saran dan bimbingan kepada Penulis.
3. Bapak dan Ibu Dosen di Jurusan Teknik Komputer Universitas Komputer Indonesia, yang telah banyak memberikan ilmu, wawasan motivasi serta bimbingannya, baik secara akademik maupun non akademik.
4. Seluruh staff administrasi dan bagian kebersihan di jurusan Teknik Komputer, terima kasih atas segala pelayanan akademiknya.
6. Koorlab dan teman-teman asisten LAB. Elektronika terimakasih atas segala bantuannya terutama peminjaman alatnya.
7. Ayah dan almarhumah Ibu yang sudah memberikan dukungan dengan sabar, baik dengan do’a maupun ikhtiar. Semoga Allah SWT., memeberikan kemuliaan kepada keduanya didunia dan kelak di akhirat, aamiin.
8. Teman-teman di Divisi Roket Unikom, terima kasih atas dukungannya, semoga selalu bisa mengharumkan almamater Unikom.
9. Semua orang yang telah membantu Penulis dalam mengerjakan tugas akhir ini yang tidak bisa disebutkan satu persatu.
Akhirnya, Penulis berharap semoga penelitian ini menjadi sumbangsih yang bermanfaat bagi dunia sains dan teknologi di Indonesia, khususnya disiplin keilmuan yang Penulis dalami.
Bandung, Agustus 2011