DESAIN MODEL DIAGNOSTIK RESIKO ERGONOMI PADA PEMANENAN KELAPA SAWIT SECARA MANUAL
NUGRAHANING SANI DEWI
SEKOLAH PASCASARJANA INSTITUT PERTANIAN BOGOR
PERNYATAAN MENGENAI TESIS DAN
SUMBER INFORMASI SERTA PELIMPAHAN HAK CIPTA
Dengan ini saya menyatakan bahwa tesis berjudul Desain Model Diagnostik Resiko Ergonomi pada Pemanenan Kelapa Sawit Secara Manual adalah benar karya saya dengan arahan dan bimbingan Dr Ir M. Faiz Syuaib, M.Agr sebagai ketua, Dr Ir Lenny Saulia, MSi sebagai anggota komisi pembimbing dan belum diajukan dalam bentuk apa pun kepada perguruan tinggi mana pun. Sumber informasi yang berasal atau dikutip dari karya yang diterbitkan maupun tidak diterbitkan dari penulis lain telah disebutkan dalam teks dan dicantumkan dalam Daftar Pustaka di bagian akhir tesis ini.
Dengan ini saya melimpahkan hak cipta dari karya tulis saya kepada Institut Pertanian Bogor.
Bogor, Juli 2014 Nugrahaning Sani Dewi
RINGKASAN
NUGRAHANING SANI DEWI. Desain Model Diagnostik Resiko Ergonomi pada Pemanenan Kelapa Sawit Secara Manual. Dibimbing oleh M. FAIZ SYUAIB dan LENNY SAULIA.
Salah satu faktor penting dalam pencapaian produktivitas kelapa sawit adalah proses pemanenan. Pemanenan kelapa sawit secara manual berpotensi menimbulkan permasalahan keselamatan dan kesehatan kerja. Penelitian ini dilakukan dengan pendekatan biomekanik, studi gerak dan antropometri untuk mendesain model diagnostik resiko ergonomi pada pemanenan kelapa sawit secara manual. Model ini didesain untuk menghasilkan gerak kerja pemanenan dan prosedur pemanenan yang lebih baik serta rekomendasi panjang egrek yang dibutuhkan sehingga kegiatan pemanenan dapat dilakukan secara aman, efektif dan produktif. Alat panen „egrek‟ dipelajari dalam penelitian ini.
Hasil simulasi pemanenan menghasilkan formulasi jarak aman dt (m) = 0.5 (Ht - Hs) + 0.35 dan panjang egrek yang dibutuhkan lp (m) = (Ht - Hs)/ cos dimana Ht adalah tinggi target potong, Hs adalah tinggi bahu pemanen dan adalah sudut yang terbentuk antara galah egrek dengan pohon. Berdasarkan formula tersebut, pemanenan kelapa sawit dengan tinggi target pohon lebih dari 16 m sudah tidak aman untuk dilakukan dengan menggunakan egrek. Berdasarkan kriteria selang gerak alami tubuh manusia, Critical Range of Motion (CRM) pada gerak pemanenan adalah : leher ekstensi (30°), bahu fleksi (94°), lengan bawah fleksi (124°). Batas beban yang masih dapat diterima yaitu 21.85 N untuk otot splenius leher, 1091.96 N untuk otot deltoid bahu dan 1634.31 N untuk otot branchioradialis lengan bawah.
Analisis biomekanik terhadap postur kerja pemanenan yang ada di lapang saat ini (existing posture) menunjukkan bahwa resiko ergonomi pada bahu dan lengan bawah relatif lebih kecil dari Critical Load (CL) dan Critical Range of Motion (CRM), namun demikian pada leher, CL dan CRM sudah melewati ambang batas yang diterima. Oleh karena itu, postur ini direkomendasikan untuk tidak dilakukan dan perlu diperbaiki dengan menggunakan postur yang disarankan. Dengan mempertimbangan resiko postur dan beban, postur yang disarankan terbukti lebih aman untuk dilakukan. Postur yang disarankan untuk dilakukan adalah : ekstensi leher ≤ 30° (21.85 N), fleksi bahu ≤ 94° (1091.96 N), fleksi lengan bawah ≤ 124° (1634.31 N). Model diagnostik resiko ergonomi pada pemanenan kelapa sawit telah dirancang dengan parameter nya adalah jarak aman (dt), panjang batang egrek yang dibutuhkan (lp), critical range of motion (CRM) dan critical load (CL) pada leher, bahu dan lengan bawah.
SUMMARY
NUGRAHANING SANI DEWI. Ergonomic Risk Assesment‟s Tool of Oil Palm Manual Harvesting. Supervised by M. FAIZ SYUAIB and LENNY SAULIA.
One of important factor for oil palm productivity is harvesting activity. Oil palm harvesting activity is mostly done by ‘human power’ manual handling, therefore the activity may cause work safety and health problems. This research is deal with anthropometry, motion study and biomechanic to find out the risk of manual handling and to develop ergonomic assessment model of oil palm harvesting. This model was designed in the aims to find out better work motion, good procedure and better design of harvesting tool, so the manual harvesting can be done in more safe, efficient and productive. Manual harvesting activities
by using conventional tools named ‘egrek’ was studied in this research.
Some of important result show that the formula for the appropriate distance dt (m) = 0.5(Ht - Hs) + 0.35 and total length for ‘egrek’
lp t - s where dt is the distance between harvester’s position and the tree, lp is the the length of egrek, Ht is bunches’s height, Hs is the harvester’s shoulder height and is angle between egrek and the tree. Based on the formula, oil palm harvesting for more than 16 m bunches’s height is not safe with ‘egrek’. Based on Natural Range of Motion’s criteria, Critical Range of Motion (CRM) for harvesting activity are: neck extention (30°), shoulder flexion (94°), forearm flexion (124°). Critical load in Critical Range of Motion (CRM) condition for neck, shoulder and forearm are 21.85 N, 1091.96 N and 1634.31 N.
The result of biomechanic analysis for harvesting activity’s posture in the real condition (existing posture) show that ergonomic risk for harvester shoulder and forearm are lower than Critical Load (CL) and Critical Range of Motion (CRM), but in the neck, Critical Load (CL) and Critical Range of Motion (CRM) went through the safe limits. Because of that, the existing posture are not recommended. Recommend posture for safe harvesting are : neck extention ≤ 30° (21.85 N), shoulder flexion ≤ 94° (1091.96 N), forearm flexion ≤ 124° (1634.31 N). Ergonomic Risk Assesment’s Tool of Oil Palm Manual Harvesting was designed with the parameter: appropriate distance (dt), the length of egrek (lp, Critical Range of Motion (CRM) and Critical Load (CL) for neck, shoulder and forearm.
© Hak Cipta Milik IPB, Tahun 2014
Hak Cipta Dilindungi Undang-Undang
Dilarang mengutip sebagian atau seluruh karya tulis ini tanpa mencantumkan atau menyebutkan sumbernya. Pengutipan hanya untuk kepentingan pendidikan, penelitian, penulisan karya ilmiah, penyusunan laporan, penulisan kritik, atau tinjauan suatu masalah; dan pengutipan tersebut tidak merugikan kepentingan IPB
Tesis
sebagai salah satu syarat untuk memperoleh gelar Magister Sains
pada
Program Studi Teknik Mesin Pertanian dan Pangan
DESAIN MODEL DIAGNOSTIK RESIKO ERGONOMI PADA PEMANENAN KELAPA SAWIT SECARA MANUAL
SEKOLAH PASCASARJANA INSTITUT PERTANIAN BOGOR
BOGOR 2014
Judul Tesis : Desain Model Diagnostik Resiko Ergonomi pada pemanenan Kelapa Sawit Secara Manual
Nama : Nugrahaning Sani Dewi NIM : F151130166
Disetujui oleh Komisi Pembimbing
Dr Ir M Faiz Syuaib, MAgr Ketua
Dr Ir Lenny Saulia, MSi Anggota
Diketahui oleh
Ketua Program Studi Teknik Mesin Pertanian dan Pangan
Dr Ir Y Aris Purwanto, MSc
Dekan Sekolah Pascasarjana
Dr Ir Dahrul Syah, MScAgr
PRAKATA
Puji dan syukur penulis panjatkan kepada Allah subhanahu wa ta’ala atas segala karunia-Nya sehingga tesis ini berhasil diselesaikan. Tema yang dipilih dalam penelitian ini ialah ergonomika dengan judul Desain Model Diagnostik Resiko Ergonomi pada Pemanenan Kelapa Sawit Secara Manual.
Dengan diselesaikannya penelitian hingga tersusunnya tesis ini, penulis ingin menyampaikan penghargaan dan terima kasih yang sebesar-besarnya kepada:
1. Orang tua yang selalu memberikan doa, semangat dan kasih sayangnya hingga tesis ini dapat terselesaikan.
2. Dr Ir M. Faiz Syuaib, MAgr selaku ketua komisi pembimbing dan Dr Ir Lenny Saulia, MSi selaku anggota komisi pembimbing yang selalu memberikan bimbingan, masukan, dan saran-sarannya dalam menyelesaikan tesis ini.
3. Dr Ir Slamet Widodo, STP, MSc selaku penguji luar atas masukan dan saran-sarannya.
4. Program Studi Teknik Mesin Pertanian dan Pangan dan Fakultas Teknologi Pertanian yang telah membantu dan memberikan ijin pelaksanaan penelitian.
5. PT Astra Agro Lestari, Tbk atas semua bantuan dan fasilitas yang telah diberikan sehingga penelitian ini dapat dilakukan dengan baik dan lancar. 6. Mas Ali, Rekan-rekan Laboratorium Ergonomika dan seluruh
teman-teman TMP angkatan 2012 yang selalu memberikan masukan dan semangat selama penyusunan tesis ini.
Penulis menyadari sepenuhnya bahwa penyusunan tesis ini masih belum sempurna. Untuk itu penulis mengharapkan kritik dan saran dari semua pihak sebagai upaya perbaikan selanjutnya, serta penulis berharap semoga tesis ini dapat bermanfaat bagi kita semua.
DAFTAR ISI
DAFTAR TABEL vi
DAFTAR GAMBAR vi
DAFTAR LAMPIRAN vi
1 PENDAHULUAN 1
Latar Belakang 1
Perumusan Masalah 2
Tujuan Penelitian 2
Batasan Masalah 3
2 TINJAUAN PUSTAKA 3
3 METODE 12
Waktu dan Tempat 12
Alat dan Subjek 12
Prosedur Penelitian 12
4 HASIL DAN PEMBAHASAN 16
Simulasi Model Antropometri Pemanenan pada Kondisi Ambang Batas 16 Formulasi Jarak Aman dan Panjang egrek yang Dibutuhkan 19
Analisis Biomekanika 22
5 SIMPULAN DAN SARAN 33
Simpulan 33
Saran 34
DAFTAR PUSTAKA 34
LAMPIRAN 36
DAFTAR TABEL
1 Elemen-elemen kerja pada aktivitas pemanenan kelapa sawit 4
2 Selang gerak dari beberapa zona gerakan 9
3 Batas beban yang masih dapat diterima pada bahu dan lengan bawah 27
DAFTAR GAMBAR
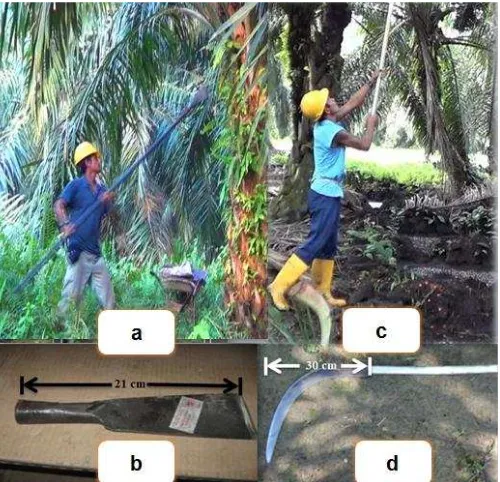
1 Dua teknik dalam proses cutting yaitu teknik mendorong (a) dengan menggunakan pisau dodos (c) dan teknik menarik (b) dengan
menggunakan pisau egrek (d) 4
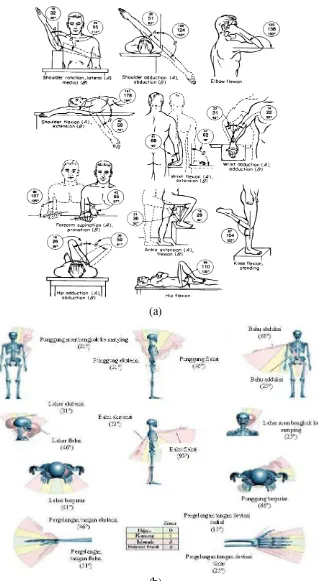
2 Selang Alami Gerakan (SAG) tubuh manusia 8
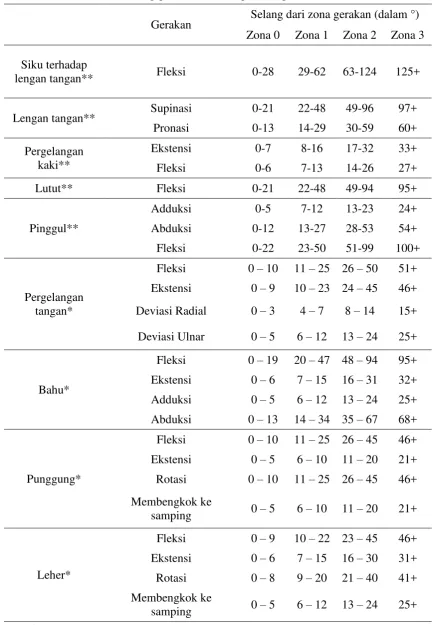
3 letak otot-otot pergerakan leher, bahu, lengan dan keempat jari : (a)
bidang depan (b) bidang belakang 11
4 Bagan alir penelitian 13
5 Perhitungan kinetika pada bahu 14
6 Perhitungan kinetika pada lengan bawah 15
7 Persentasi per segmen tubuh 15
8 Model antropometri pemanenan saat kondisi ambang batas ekstrim yaitu pada postur sebelum (A) dan sesudah (B) gerakan memotong
pelepah dan tandan 17
9 Gambaran formulasi rumus jarak aman dan panjang egrek ideal 19 10 Grafik pengaruh tinggi target potong (Ht) terhadap jarak aman (dh) 20 11 Grafik pengaruh tinggi target potong (Ht) terhadap panjang egrek yang
dibutuhkan (lp) 21
12 Diagram gaya pada segmen tubuh leher 22
13 Diagram gaya pada segmen tubuh bahu untuk sudut fleksi ≥ 90° 23 14 Diagram gaya pada segmen tubuh bahu untuk sudut fleksi ≤ 90o 24 15 Diagram gaya pada segmen lengan bawah untuk sudut fleksi ≥ 30° 25 16 Diagram gaya pada segmen lengan bawah untuk sudut fleksi ≤ 30° 26 17 Persentase kekuatan genggaman terhadap berbagai tipe sarung tangan 28 18 Pemotongan pelepah dan tandan pada kondisi real di lapangan 29 19 Gambar postur model anthropometri pada postur yang disarankan dan
postur saat ini 30
20 Hasil analisis biomekanik pada leher untuk postur yang disarankan dan
postur saat ini 31
21 Grafik perbandingan beban mekanik pada postur yang disarankan dan
1
PENDAHULUAN
Latar Belakang
Kelapa sawit (Elaeis guineensis Jacq.) merupakan tumbuhan penghasil minyak paling potensial. Menurut FAO (2002) dengan yield yang tinggi, kelapa sawit dapat menghasilkan lebih dari 20 ton Tandan Buah Segar (TBS)/ha setiap tahunnya di bawah pengelolaan ideal yang sama dengan 5 ton minyak/ha/tahun. Saat ini, Indonesia adalah produsen terbesar minyak kelapa sawit di dunia dengan menyumbang 40% dari produksi total minyak kelapa sawit dunia (FAO 2010). Berdasarkan data Kementrian Pertanian pada tahun 2013, Indonesia memiliki luas areal panen sebesar 10010824 ha dengan jumlah produksi sebesar 27746125 ton. Data tersebut diperkirakan akan terus meningkat pada tahun-tahun mendatang seiring terus meningkatnya permintaan kepala sawit dunia untuk produk makanan (74%) dan kebutuhan industri (24%) (USDA 2010). Permintaan kelapa sawit yang terus meningkat akan berimplikasi pada terus ditingkatkannya produktivitas. Salah satu faktor penting dalam pencapaian produktivitas adalah proses pemanenan. Keberhasilan pemanenan akan menunjang pencapaian produktivitas tanaman (Pusat Penelitian Kelapa Sawit 2007).
2
Penelitian sebelumnya (Dewi 2013), saya menggunakan pendekatan pada lingkup gerakannya saja tetapi belum mencerminkan pembebanan sebenarnya yang diterima oleh pemanen. Maka dari itu diperlukan penelitian lanjutan yaitu dengan pendekatan biomekanik untuk menganalisis seberapa besar gaya yang dibutuhkan otot untuk merespon tekanan tersebut sehingga resiko cidera otot dapat dihindari (Sanders dan Cormick 1993). Sebelumnya, analisis biomekanik telah digunakan pada pengoperasian traktor tangan (Daffir 2002), proses pemotongan secara manual (Hagen 2006), kegiatan mengangkat barang di bandara (Jung et al. 2007), proses pemanenan tebu (Rohman 2008) dan yang terkini banyak dikembangkan di bidang olahraga seperti analisis biomekanik untuk teknik melempar bola pada olahraga kriket (Hussain 2008). Pada penelitian ini, dengan mengetahui besarnya distribusi gaya dan beban biomekanik maka potensi tingkat resiko biomekanik (load risk) dapat diketahui. Resiko kerja berdasarkan pendekatan selang alami gerak (posture risk) pada penelitian Dewi (2013) dan resiko biomekanik (load risk) ini akan dikaji untuk dijadikan masukan dalam pembuatan model simulasi diagnostik resiko ergonomi pada pemanenan kelapa sawit secara manual. Model tersebut, diharapkan akan menjadi dasar dibangunnya suatu program yang dapat mendiagnosa resiko ergonomi yang terjadi di tubuh pemanen pada proses pemanenan kelapa sawit secara manual. Sebagian dari penelitian ini telah dipresentasikan melalui poster pada Summer Course 2013 di Bogor, presentasi secara oral dan dipublikasikan pada prosiding The 9th International Student Conference at Ibaraki University (ISCIU 9) pada 30 November 2013 di Ibaraki University, Jepang.
Perumusan Masalah
1. Pekerjaan pemanenan masih dilakukan secara manual dan mengandalkan tenaga manusia yang memiliki keterbatasan kapasitas kerja.
2. Proses pemanenan kelapa sawit memiliki tingkat resiko kecelakaan kerja yang relatif tinggi.
3. Tren pertumbuhan industri kelapa sawit berimplikasi pada tingginya tuntutan produktivitas panen yang dewasa ini belum diiringi peningkatan keselamatan dan kesehatan kerja.
4. Penelitian sebelumnya telah ditemukan distribusi resiko kerja pada tubuh pemanen yang masih menggunakan pendekatan gerak (selang gerak tubuh) saja. Sehingga perlu ditindaklanjuti dengan mempertimbangkan faktor pembebanan.
Tujuan Penelitian
Penelitian pada kegiatan pemanenan kelapa sawit ini bertujuan untuk : 1. Melakukan analisis biomekanika (gaya dan pembebanan) pada anggota
3 2. Mengetahui potensi dan distribusi beban kerja serta tingkat resiko kerja
pada anggota tubuh.
3. Mendesain model diagnostik resiko ergonomi dengan pendekatan biomekanik.
Batasan Masalah
Berdasarkan tujuan dari penelitian, dan agar lebih memusatkan perhatian pada pemecahan masalah maka perlu dilakukan pembatasan masalah, beberapa batasan-batasan terhadap masalah yang akan dibahas antara lain :
1. Proses pemanenan kelapa sawit yang yang diteliti adalah proses pemanenan inti yaitu pemotongan pelepah dan Tandan Buah Segar (TBS). 2. Alat yang digunakan untuk proses pemotongan pelepah dan TBS adalah
egrek, karena penggunakan dodos lebih aman dibandingkan penggunaan egrek (Dewi 2013).
3. Bagian tubuh yang dianalisis adalah bagian upper body yaitu leher, bahu dan lengan bawah. Bagian-bagian tersebut terbukti memiliki resiko ergonomi paling besar pada penelitian (Dewi 2013).
4. Beban biomekanik dihitung dengan teknik biostatic mechanics dan hanya dilakukan analisis pada sistem gaya dua dimensi. Bagian-bagian tubuh dianggap menerima beban secara statik menurut hukum kesetimbangan benda.
2
TINJAUAN PUSTAKA
Definisi Kerja Pemanenan Kelapa Sawit
Pemanenan adalah pemotongan tandan buah segar dari pohon hingga pengangkutan ke pabrik (Pusat Penelitian Kelapa Sawit 2007). Kiswanto et al. (2008) menyatakan bahwa tanaman kelapa sawit mulai berbuah setelah 2.5 tahun dan masak sekitar 5.5 bulan setelah penyerbukan dan dapat dipanen jika tanaman telah berumur 31 bulan. Perkebunan kelapa sawit pada umumnya menggunakan rotasi panen 7 hari, artinya satu areal panen harus dimasuki oleh pemanen tiap 7 hari. Pada sistem panen yang dilakukan, dikenal istilah seksi panen dan ancak. Seksi panen adalah luasan panen yang harus dituntaskan dalam 1 hari. Penetapan seksi panen dilakukan searah atau berlawanan dengan arah jarum jam sedangkan luasan setiap seksi ditentukan berdasarkan perhitungan potensi produksi masing-masing blok dari hasil sensus produksi semester (Pahan 2008).
4
Tabel 1 Elemen-elemen kerja pada aktivitas pemanenan kelapa sawit
No Elemen Kerja Lambang Huruf
1 Mengidentifikasi/ verifikasi tandan matang Ve
2 Menyiapkan alat panen Pr
3 Memotong tandan dan pelepah CuD/CuE
4 Mencacah dan memindahkan pelepah Ba
5 Memuat tandan ke angkong Lo
6 Memungut brondolan Br
7 Perpindahan dari satu tempat ke tempat lain Mo 8 Membongkar dan merapihkan tandan di
Tempat Pengumpulan Hasil (TPH)
Un 9 Membuang sisa Tandan Buah Segar (TBS)/
cangkam kodok
Ck
Dari sembilan elemen kerja diatas, salah satu elemen kerja yang memiliki resiko ergonomi tinggi dan merupakan inti dari pemanenan kelapa sawit adalah memotong pelepah dan tandan (Cu).
Elemen kerja memotong pelepah dan tandan (Cu) dimulai ketika pemanen mulai mengarahkan alat potong ke pelepah/tandan dan kemudian memotong pelepah/tandan sampai pelepah/tandan tersebut jatuh ke tanah. Dari hasil pengamatan, gerakan ini biasanya tidak hanya dilakukan dalam sekali tarikan, tetapi berulang-ulang sampai pelepah dan tandan benar-benar terpotong. Menurut Dewi (2013) ada dua cara dalam memotong pelepah atau tandan, yaitu dengan cara mendorong dan menarik yang dijelaskan pada Gambar 1.
5 Teknik mendorong menggunakan alat potong berupa dodos untuk ketinggian target potong kurang dari 3 m. Dodos terdiri dari 2 bagian yaitu pipa dodos dan pisau dodos. Batang pipa terbuat dari pipa galvanis dan mempunyai panjang 2.75 m. Batang tersebut mempunyai diameter luar 3.2 cm dan tebal 1.5 mm sedangkan panjang pisaunya adalah 21 cm. Teknik yang kedua yaitu dengan cara menarik mengunakan alat potong yang disebut egrek untuk ketinggian target potong lebih dari 3 m. Egrek terdiri dari 3 bagian yaitu pipa, pisau egrek dan klem penyambung. Pipa terdiri dari 3 sambungan yang tiap sambungannya berukuran panjang 3 m, dengan diameter pipa 1, 2 dan 3 secara berurutan adalah 4.4 cm, 3.8 cm dan 3.2 cm. Sedangkan untuk panjang pisau egrek adalah 30 cm.
Pendekatan Ergonomika dalam Pemanenan Kelapa Sawit
Istilah ergonomi berasal dari bahasa Yunani “ergo” yang bearti kerja dan “nomos” yang berarti aturan atau ilmu pengetahuan. Sehingga berdasarkan bahasa, ergonomi berarti kerja atau ilmu tentang manusia yang berhubungan dengan lingkungan pekerjaannya. Disiplin ilmu ergonomi bertujuan untuk mempelajari kemampuan manusia dan keterbatasannya pada lingkungan pekerjaannya untuk meningkatkan produktivitas dan efisiensi kerja dengan meningkatkan interaksi manusia dengan produk, sistem dan lingkungannya (Syuaib 2003).
The International Ergonomics Association (IEA) mendefinisikan ergonomika sebagai disiplin ilmu yang mempelajari pemahaman dasar tentang interaksi antara manusia dan bagian lain dari sistem yang berkontribusi pada rancangan tugas, pekerjaan, produk dan lingkungan agar sesuai dengan kebutuhan, kemampuan dan keterbatasan manusia.
Pada dasarnya, ilmu ergonomi mempunyai dua tujuan utama (Sanders dan Cormick 1993), yaitu :
1. Meningkatkan efektivitas dan efisiensi kerja atau aktivitas lain. Termasuk di dalamnya seperti meningkatkan kemampuan kerja, mengurangi kesalahan kerja dan meningkatkan produktivitas.
2. Meningkatkan nilai tambah seseorang seperti keamanan, kenyamanan, memperbesar peluang diterimanya sutu benda /alat oleh pengguna (user acceptance), meningkatkan kepuasan kerja, meningkatkan kualitas hidup dan juga mengurangi kelelahan dan tekanan (stress).
6
Dalam permasalahan pemanenan kelapa sawit yang masih dikerjakan secara manual, kita dapat mendekatinya dengan menggunakan pendekatan ergonomika. Sanders dan Cormick (1993) menyatakan bahwa yang dilakukan ergonomika atau disebut juga dengan human factor adalah mengubah alat dan lingkungan yang digunakan pekerja agar lebih cocok dengan kemampuan (capabilities), keterbatasan (limitation), dan kebutuhan seseorang (needs). Dalam kasus ini, kita dapat mengimplementasikan human faktor untuk merancang sistem (prosedur kerja) yang cocok dengan karakteristik pemanen dan berbagai keterbatasannya untuk mengurangi ketidakefisienan (inefficiency), kelelahan kerja (fatigue), kecelakaan kerja (accidents), cidera (injuries), dan kesalahan kerja (errors) sehingga kegiatan pemanenan lebih aman, efektif dan efisien.
Biomekanik
Biomekanika didefinisikan secara umum oleh Hatze (1974) yang diacu dalam Knudson (2007) sebagai ilmu yang mempelajari pergerakan benda hidup dengan menggunakan ilmu mekanika. Mekanika merupakan cabang dari ilmu fisika yang fokus pada diskripsi gerakan dan bagaimana gaya dapat menghasilkan gerakan. Erat dengan ilmu mekanika, menurut Bridger (2002), tubuh manusia adalah sebuah sistem mekanis yang mengikuti aturan hukum-hukum fisika. Prinsip-prinsip fisika digunakan untuk menentukan tekanan mekanik pada tubuh dan gaya otot yang dibutuhkan untuk menetralkan tekanan. Knudson (2007) menyatakan bahwa biomekanik menyediakan konsep dan perhitungan matematis yang penting untuk memahami bagaimana benda hidup bergerak dan bagaimana kita dapat membuat gerakan menjadi lebih aman. Sedangkan menurut Sanders dan Cormick (1993), pendekatan biomekanik dalam ergonomika yaitu melihat tubuh sebagai sebuah sistem penghubung (links). Sistem tersebut menghubungkan sendi (joint) yang memiliki hubungan dengan bagian-bagian tubuh seperti lengan atas (link), siku (joint) dan lengan bawah (link).
Contini dan Drillis (1966) menjelaskan bahwa banyak ilmu yang mendasari ilmu biomekanika yaitu kinesiology, anatomy, teoritical mechanic, antropometry dan bioinstrumentasi. Biomekanik yang dimaksud dalam kasus ini adalah occupational biomechanic yang didefinisikan sebagai bagian dari ilmu biomekanik terapan yang mempelajari interaksi fisik antara pekerja dengan mesin, peralatan dan material dengan tujuan untuk meminimumkan keluhan pada sistem kerangka otot. Implementasinya yaitu pada kasus manual dan material handling serta perancangan prosedur kerja pada pemanenan kelapa sawit
Fokus occupational biomechanic pada pemanenan kelapa sawit antara lain postur tubuh, selang gerak, koordinasi persendian dan otot.
Postur tubuh
7 bagian tubuh harus berada pada daerah kontak antara tubuh dengan permukaan pendukung (supporting surface). Dalam posisi berdiri, berat tubuh harus ditransmisiskan ke lantai. Struktur bagian tubuh harus dijaga agar tetap dapat menjaga keseimbangan postur dan mengurangi tekanan akibat gaya yang berlebihan (Bridger 2002). Winter (1979) menjelaskan bahwa ada 3 jenis gaya dalam tubuh manusia yaitu :
1. Gaya gravitasi, yaitu gaya yang melalui pusat massa dari tiap segmen tubuh manusia dengan arah ke bawah. Besarnya gaya ini sama dengan massa dikali dengan percepatan gravitasi yang normalnya 9.8 m/s2.
2. Gaya reaksi bidang atau gaya luar yaitu gaya yang terjadi akibat beban pada segmen tubuh atau berat segmen tubuh itu sendiri.
3. Gaya otot dan ligamen yaitu gaya yang terjadi pada bagian sendi, baik akibat gesekan sendi atau akibat gaya pada otot yang melekat pada sendi. Gaya ini menggambarkan besarnya momen otot.
Selang gerak
Menurut Saladin (2011), range of motion (ROM) atau biasa kita sebut dengan selang gerak adalah jumlah derajat bebas yang dapat dicapai oleh tulang relatif terhadap sendi pada tulang. Tubuh manusia memiliki Selang Alami Gerakan (SAG) yang dapat memperbaiki sirkulasi darah dan fleksibilitas sehingga dapat bekerja dengan nyaman dan menghasilkan produktivitas tinggi (Openshaw 2006). Sanders dan Cormick (1993) menyatakan bahwa Selang Alami Gerakan (SAG) merupakan sejumlah gerakan yang melalui bagian tertentu yang terjadi pada sendi dan dinyatakan dalam derajat pergerakan seperti dijelaskan pada Gambar 2a dan Tabel 2. Selain itu contoh gerakan SAG lainnya berdasarkan Chaffin (1999) dan Woodson (1992) diacu dalam Openshaw (2006) diberikan pada Gambar 2b. Pada setiap gerakan pemanenan kelapa sawit, kita dapat memetakan distribusi zona bahaya yang terjadi di setiap anggota tubuh pemanen.Terdapat empat zona yang dihadapi manusia ketika duduk atau berdiri (Openshaw 2006), yaitu:
8
(a)
(b)
Gambar 2 Selang Alami Gerakan (SAG) tubuh manusia a
9 Tabel 2 Selang gerak dari beberapa zona gerakana
Gerakan Selang dari zona gerakan (dalam °) Zona 0 Zona 1 Zona 2 Zona 3
Sumber : *)Chaffin (1999) dan Woodson (1992) diacu dalam Openshaw (2006)
** )
10
Zona-zona diatas merupakan selang gerak dimana anggota gerak tubuh dapat bergerak secara bebas. Pada selang gerak alami terdapat gerakan pergelangan tangan, punggung, tulang belakang dan kaki. Gerakan-gerakan tersebut terdiri atas gerakan fleksi (flexion), ekstensi (extension), deviasi ulnar (ulnar deviation), adduksi (adduction), abduksi (abduction), membengkok kesamping (lateral bend) dan berputar (rotation). Gerakan fleksi (flexion) adalah pergerakan dari segmen tubuh dikerenakan penurunan sudut pada sendi, seperti membengkokkan pergelangan tangan, bahu, punggung dan kaki. Ekstensi (extension) merupakan pergerakan yang berlawanan arah dengan fleksi yang disebabkan penambahan sudut pada sendi, seperti meluruskan pergelangan tangan, bahu, punggung dan kaki. Adduksi (adduction) merupakan pergerakan segmen tubuh terhadap garis tengah tubuh seperti ketika memindahkan lengan dari posisi horizontal ke posisi vertikal. Abduksi (abduction) merupakan pergerakan segmen tubuh yang menjauhi garis tengah tubuh seperti mengangkat lengan ke samping. Koordinasi persendiaan
Persendian merupakan titik kritis dalam setiap pergerakan. Pada bagian ini, beban atau tekanan ditransmisikan. Tubuh manusia terdiri dari banyak penghubung (link) yang dibatasi oleh sensi-sendi. Hal ini diungkapkan oleh Chaffin dan Anderson (1984) yang diacu oleh (Nurmianto 2004) yang menyebutkan bahwa tubuh manusia terdiri dari 6 penghubung (link) yaitu:
1. Link lengan bawah, dibatasi sendi pergelangan tangan dan siku. 2. Link lengan atas, dibatasi sendi siku dan bahu.
3. Link punggung, dibatasi sendi bahu dan pinggul.
4. Link tungkai atas (paha), dibatasi sendi pinggul dan lutut. 5. Link tungkai bawah (betis), dibatasi sendi lutut dan mata kaki. 6. Link kaki, dibatasi sendi pergelangan kaki dan telapak kaki. Otot
11
(a) (b)
Gambar 3 letak otot-otot pergerakan leher, bahu, lengan dan keempat jari. : (a) bidang depan (b) bidang belakang tubuh manusia
a
Sumber : Anatomy Atlases (1995) dengan penambahan keterangan
12
jari), siku dan lengan bawah. Otot brachioradialis ini berhubungan dengan otot fleksor jari superfisialis yang berfungsi untuk melakukan fleksi di keempat jari dan pergelangan tangan. Otot ini berperan penting dalam fleksi yang kuat terhadap tahanan (Sloane 1994). Gambar 3 menjelaskan letak otot-otot pergerakan leher, bahu, lengan dan keempat jari.
3
METODE
Waktu dan Tempat Penelitian
Penelitian dilaksanakan mulai bulan Januari 2014 hingga bulan Juni 2014 di Laboratorium Ergonomika, Departemen Teknik Mesin dan Biosistem, Fakultas Teknologi Pertanian, IPB. Sedangkan observasi dilakukan di PT Astra Agro Lestari, tbk yang bertempat di tiga anak perusahaannya yaitu PT Sari Lembah Subur, Riau, PT Waru Kaltim Plantation, Kalimantan Timur dan PT Pasangkayu, Sulawesi Barat.
Alat dan Subjek
Peralatan yang digunakan pada penelitian ini adalah seperangkat komputer dan alat tulis untuk proses pengolahan data. Beberapa perangkat lunak yang digunakan adalah spreadsheet dan Computer Aided Design (CAD). Subjek yang digunakan untuk mendapatkan data antropometri pemanen kelapa sawit berjumlah 48 pemanen di PT Sari Lembah Subur, Riau, 43 pemanen di PT Waru Kaltim Plantation, Kalimantan Timur, dan 50 pemanen di PT Pasangkayu, Sulawesi Barat yang ditunjukkan pada Lampiran 1. Subjek yang diteliti untuk mengetahui tingkat resiko gerakan pada proses pemanenan kelapa sawit berjumlah 9 pemanen di PT Sari Lembah Subur, Riau, 5 pemanen di PT Waru Kaltim Plantation, Kalimantan Timur, dan 11 pemanen di PT Pasangkayu, Sulawesi Barat yang ditunjukkan pada Lampiran 2. Data tersebut berasal dari penelitian Dewi (2013).
Prosedur Penelitian
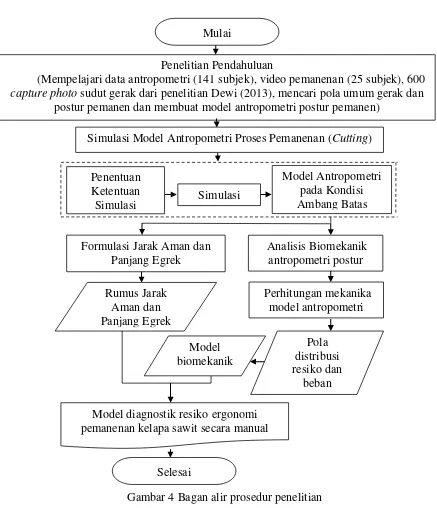
13
Gambar 4 Bagan alir prosedur penelitian
Penelitian Pendahuluan
Penelitian pendahuluan dimulai dengan mempelajari data sudut gerak tubuh berdasarkan penelitian Dewi (2013) untuk mempelajari pola umum gerak dan postur pemanen serta pembuatan model antropometri postur pemanen berdasarkan pola tersebut. Perhitungan kinetika di setiap postur subjek pemanen akan dilakukan pada model antropometri ini.
Simulasi Model Antropometri Pemanenan
Simulasi model antropometri pemanenan dilakukan untuk mencari postur pemanen yang terjadi pada kondisi ambang batas ekstrim. Kondisi ambang batas
Formulasi Jarak Aman dan
(Mempelajari data antropometri (141 subjek), video pemanenan (25 subjek), 600 capture photo sudut gerak dari penelitian Dewi (2013), mencari pola umum gerak dan
postur pemanen dan membuat model antropometri postur pemanen) Simulasi Model Antropometri Proses Pemanenan (Cutting)
14
ekstrim yang dimaksud adalah kondisi tersulit yang masih bisa diterima pemanen dimana postur pemanen membentuk sudut gerak yang maksimal di anggota tubuh atas. Hal ini dilakukan untuk mencari batas resiko maksimal yang dapat terjadi pada postur pemanen yang nantinya akan dijadikan batasan nilai resiko yang dapat diterima pemanen. Sebelum melakukan simulasi dengan mengunakan Computer Aided Design (CAD), terlebih dahulu ditentukan ketentuan simulasi.
Formulasi Jarak aman dan Panjang Egrek yang Dibutuhkan
Proses formulasi jarak aman dan panjang egrek yang dibutuhkan dilakukan setelah simulasi model antropometri pada kondisi ambang batas ekstrim dilakukan. Dari kondisi tersebut ditemukan sudut antara egrek dan pohon (. Sudut ini nantinya akan menghasilkan formulasi jarak aman dan panjang egrek yang ideal untuk pemanenan kelapa sawit agar tetap aman.
Analisis Biomekanika
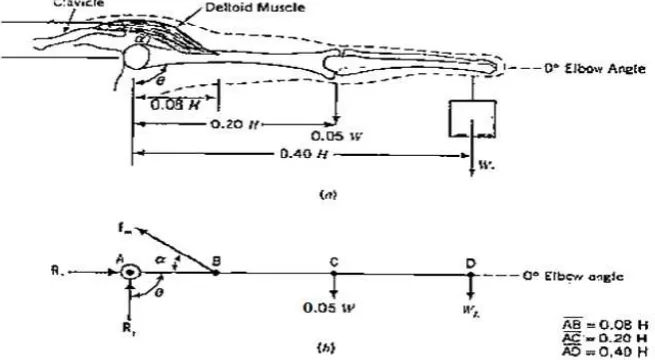
Analisis biomekanika dilakukan berdasarkan perhitungan mekanika yang nantinya akan diterapkan pada setiap model antropometri postur pemanen dalam kondisi ambang batas ekstrim yang telah dihasilkan pada tahap simulasi sebelumnya. Gambar postur pemanen tersebut digambarkan sudut-sudut gerakannya menggunakan CAD. Perhitungan mekanika dilakukan pada segmental tubuh yang kritis seperti leher, bahu dan lengan bawah. Perhitungan mekanika pada bahu dan lengan berdasarkan persamaan yang dibuat oleh Philip (2000) yang diacu oleh Rohman (2008), ditunjukkan pada gambar 5 dan 6.
15
Gambar 6 Perhitungan kinetika pada lengan bawah
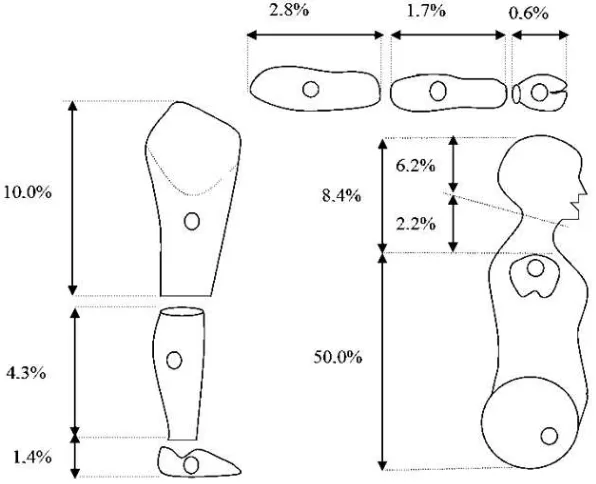
Perhitungan guna mencari momen dan gaya dapat dilakukan dengan cara menghitung gaya dan momen secara parsial atau menghitung tiap segmen yang menyusun tubuh manusia. Berat dari masing-masing segmen seperti dijelaskan pada Gambar 7.
16
4
HASIL DAN PEMBAHASAN
Simulasi Model Antropometri Pemanenan pada Kondisi Ambang Batas Ekstrim
Simulasi dilakukan pada dua postur pemanenan yaitu postur sebelum dan sesudah gerakan memotong pelepah dan Tandan Buah Segar (TBS). Hal ini dilakukan untuk mendapatkan batas resiko maksimal yang dapat terjadi pada postur saat memanen. Ketentuan-ketentuan simulasi diterapkan terlebih dahulu, yaitu :
Ketentuan pertama adalah model menggunakan anthropometri pemanen persentil 5 karena pemanen dengan ukuran tubuh persentil 5 memiliki kondisi yang lebih sulit (ekstrim) pada saat proses pemanenan. Contohnya semakin tinggi ukuran tubuh pemanen maka semakin mudah pemanen dalam memanen karena selisish tinggi badan dan tinggi target potongnya semakin kecil sehingga sudut-sudut gerak yang terbentuk pada leher dan bahu semakin kecil. Selain itu, panjang lengan yang lebih panjang semakin mudah menjangkau egrek. Hal ini menyebabkan resiko gerak yang terjadi semakin minim. Diharapkan pemanen dengan ukuran tubuh persentil 5 ini akan mewakili resiko maksimal yang diterima dalam sampel populasi pemanen pada penelitian ini. Sehingga populasi pemanen yang mewakili ukuran tubuh lebih besar dari persentil 5 seperti persentil 50 dan 95 akan memiliki resiko yang lebih kecil dari populasi pemanen dengan ukuran tubuh persentil 5.
Ketentuan kedua yaitu sudut gerak pada joint di leher, punggung dan joint siku. Hal ini dikarenakan pada joint-joint tubuh tersebut sangat mempengaruhi terbentuknya sudut gerak yang ekstrim pada joint-joint tubuh yang lain seperti pada bahu dan joint pada punggung dan anggota tubuh bawah seperti tungkai atas dan tungkai bawah. Pada joint di leher menggunakan gerakan ekstensi leher (Ne) yang menggunakan sudut maksimum kurang dari 31° yaitu 30°. Sedangkan pada joint di punggung menggunakan sudut gerak ekstensi punggung (Be) yang menggunakan sudut maksimum kurang dari 21° yaitu 20°. Selain itu agar membentuk gaya momen yang besar pada joint siku menggunakan gerak fleksi siku tangan (Ef) sebesar 90°. Hal ini berdasarkan Kroemer dan Grandjean (1997) yang menyebutkan bahwa gaya momen paling besar pada siku yang membengkok kedalam (fleksi) berada pada sudut gerak antara 90° dan 120°.
Ketentuan ketiga adalah sudut pandang pemanen. Besarnya sudut pandang pemanen menggunakan sudut pandang 15°. Berdasarkan Kroemer dan Grandjean (1997), pergerakan mata dalam selang 15° ke atas dan ke bawah dari garis pandang rata-rata masih tergolong nyaman.
17
a
Keterangan :
a
Pengelompokkan zona berdasarkan Openshaw (2006) dengan modifikasi penerjemahan kategori zona.
Gambar 8 Model antropometri pemanenan saat kondisi ambang batas ekstrim yaitu pada postur sebelum (A) dan sesudah (B) gerakan memotong pelepah dan tandan
Pada gambar Gambar 8, terdapat dua postur pemanen yang telah dijelaskan sebelumnya yaitu postur sebelum (A) dan sesudah (B) memotong pelepah dan tandan (cutting). Pada Postur A, mata pemanen memandang dengan sudut 15° ke atas. Leher pemanen membentuk sudut ekstensi (Ne) pada ambang ekstrim yaitu 30° terhadap punggung yang termasuk dalam zona 2 yang berarti gerakan leher yang terjadi termasuk dalam kategori hati-hati. Punggung membentuk sudut ekstensi (Be) sebesar 20° terhadap garis normal sesuai dengan ketentuan simulasi agar membentuk sudut ambang batas ekstrim. Bahu kanan membentuk sudut fleksi (Sf) sebesar 45° terhadap punggung sedangkan bahu kiri membentuk sudut fleksi (Sf) sebesar 84° terhadap punggung. Kedua sudut fleksi pada bahu ini masih dalam zona 1 yang termasuk dalam kategori gerakan yang aman. Lengan bawah sebelah kanan memiliki sudut fleksi (Ef) sebesar 74° terhadap bahu sesuai ketentuan simulasi sedangkan lengan bawah sebelah kiri
18
memiliki sudut fleksi (Ef) sebesar 18° terhadap bahu. Gerakan pada lengan bawah sebelah kanan dan kiri masih termasuk dalam zona 1 yaitu zona gerakan aman. Kedua lengan kanan dan kiri dimodelkan memiliki perbedaan posisi lengan berdasarkan pola umum gerak pemanen yang memiliki pola salah satu lengan berada pada posisi yang lebih tinggi dari lengan yang lainnya. Dalam simulasi tersebut digambarkan lengan kanan lebih rendah dibandingkan dengan lengan kiri. Untuk anggota gerak tubuh bagian bawah seperti tungkai atas dan tungkai bawah semuanya membentuk gerakan aman yang termasuk dalam zona 1 dan dan zona 0 yang memiliki gerakan nyaman. Tungkai atas sebelah kiri dimodelkan memiliki sudut 0° terhadap garis normal dilanjutkan tungkai bawah yang memiliki sudut 0° terhadap tungkai atas. Kedua tungkai tersebut termasuk ke dalam gerakan nyaman. Sedangkan tungkai atas sebelah kanan membentuk sudut ekstensi (Le) sebesar 6° terhadap garis normal dilanjutkan tungkai bawah membentuk sudut fleksi (Kf) sebesar 23° terhadap tungkai atas.
19 Formulasi Jarak Aman dan Panjang Egrek yang Dibutuhkan
Dari simulasi pada tahapan sebelumnya didapat besarnya sudut antara egrek dengan pohon ( yaitu sebesar 29° berdasarkan sudut gerak yang dibuat pada ambang batas beban maksimum yang masih dapat diterima. Setelah sudut diketahui, formulasi jarak dan panjang egrek dapat dilakukan dengan menggunakan perbandingan trigonometri pada bangun segitiga siku-siku. Gambaran perhitungan jarak aman dan panjang egrek yang dibutuhkan dapat dilihat pada Gambar 9.
Gambar 9 Gambaran formulasi rumus jarak aman dan panjang egrek yang dibutuhkan
Berdasarkan gambar tersebut, jarak aman pemanenan (dt) dan panjang egrek yang dibutuhkan (lp) dapat ditentukan. Untuk mencari dt maka nilai a harus dicari. Jarak antara titik pada pangkal bahu (A) dengan titik perpotongan tangan dan ujung batang egrek (B) disebut dengan a. Besarnya dapat dicari dengan menggunakan rumus Phytagoras karena lengan atas dan lengan bawah membentuk sudut siku. Karena simulasi yang dilakukan dalam kondisi ambang batas ekstrim, maka data antropometri yang digunakan menggunakan persentil 5. Untuk pemanen dengan persentil 5, panjang lengan atasnya yaitu 26 cm sedangkan lengan bawahnya sepanjang 23 cm. Sehinga perhitungannya dapat dilihat pada Persamaan 1.
a =√ = 34.71≈ 35 cm………. (1)
Jika tinggi bahu (Hs) dan tinggi pohon (Ht) diketahui maka garis AB (dh) dapat diketahui dengan rumus yang dijelaskan pada Persamaan 2.
20
Setelah a dan dh diketahui maka rumus jarak aman antara pemanen dan pohon (dt) dapat dirumuskan seperti pada Persamaan 3, 4 dan 5.
dt (m) = dh+ a……… (3) dt (m) = (Ht-Hs) tan + a……… (4) dt (m) = 0.5(Ht-Hs)+ 0.35……….. (5)
Dari persamaan persamaan di atas maka didapat juga panjang egrek yang dibutuhkan, yang dirumuskan pada Persamaan 6.
lp = (Ht-Hs)/cos
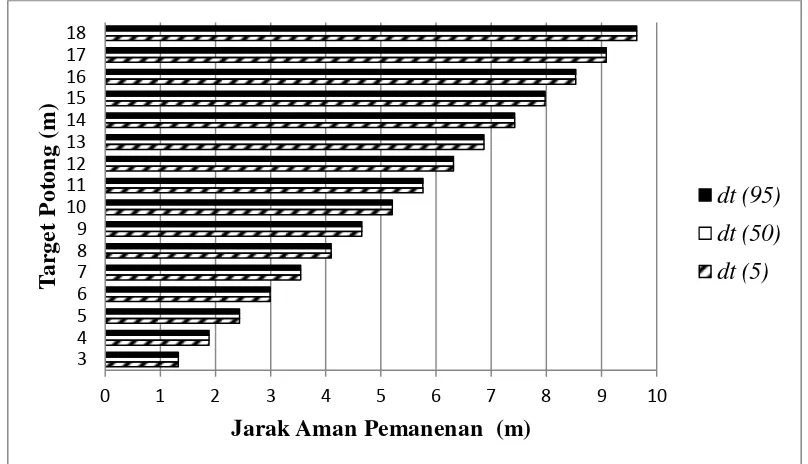
Persamaan jarak aman dan panjang egrek yang dibutuhkan dapat disimulasikan ke dalam spreadsheet dengan memodifikasi ketentuan tinggi pohon sawit dan tinggi bahu pemanen. Hal ini dilakukan agar dapat diketahui besarnya jarak aman dan panjang egrek yang dibutuhkan untuk setiap ketinggian pohon dan tinggi bahu pemanen yang diwakili dengan populasi pemanen dengan ukuran tubuh persentil 5, 50 dan 95. Grafik pengaruh tinggi target potong (Ht) terhadap jarak aman (dh) dan panjang egrek yang dibutuhkan (lp) disajikan pada Gambar 10 dan 11.
21 disimbolkan dengan dt (95). Pada Gambar 10 dapat dilihat bahwa semakin tinggi target potong maka semakin panjang jarak antara pemanen dengan pohon untuk mendapatkan kondisi yang aman. Jika jarak aman yang dibutuhkan semakin kecil maka panjang egrek yang dibutuhkan akan semakin pendek, sehingga akan mengurangi lenturan egrek saat melakukan gerakan menarik. Secara umum, pemanen lebih menyukai memanen pada jarak yang relatif dekat agar mengurangi lenturan pada egrek sehingga lebih ringan. Pada observasi di lapang, memanen dengan egrek yang menggunakan lebih dari 1 sambungan (> 3 m) terjadi lenturan pada egrek yang terbuat dari besi galvanis ringan. Perbedaan ukuran tubuh pemanen yang diwakili dengan persentil 5 untuk ukuran terkecil dari populasi, persentil 50 yang mewakili rata-rata populasi dan persentil 95 yang mewakili ukuran tubuh terbesar dari populasi, tidak terlalu mempengaruhi panjang jarak aman yang dibutuhkan untuk masing-masing persentil (dt (5), dt (50), dt (95)). Pengaruh ukuran tubuh pemanen tergolong kecil untuk persentil 5, 50 dan 95 yang terlihat pada Lampiran 4. Gambar 10 menjelaskan bahwa untuk target potong 17 m menghasilkan jarak aman lebih dari 9 m. Jarak aman 9 m tidak memungkinkan untuk dilakukan pada kondisi perkebunan kelapa sawit sekarang ini yang memiliki rata-rata jarak tanam sepanjang 9 m (Pahan 2007). Tinggi target potong 16 m dapat dijadikan batas tinggi target potong yang masih tergolong aman dan dapat diaplikasikan di lapang karena menghasilkan jarak aman kurang dari 9 m. Sehingga dapat rekomendasikan bahwa tinggi target potong lebih dari 16 m sudah tidak aman diterapkan pada kondisi perkebunan saat ini.
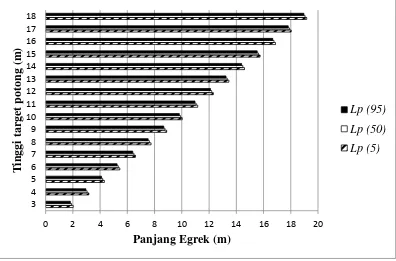
Gambar 11 Grafik pengaruh tinggi target potong (Ht) terhadap panjang egrek yang dibutuhkan (lp)
22
besarnya panjang egrek yang dibutuhkan untuk pemanen yang memiliki ukuran tubuh terbesar dari populsi yang diwakili oleh ukuran tubuh persentil 95, lp (50) merupakan panjang egrek yang dibutuhkan untuk pemanen yang memiliki ukuran tubuh rata-rata populasi yaitu persentil 50 dan lp (5) yaitu panjang egrek yang dibutuhkan untuk pemanen yang memiliki ukuran tubuh terkecil dari populasi yang diwakili oleh ukuran tubuh persentil 5. Dapat dilihat bahwa semakin tinggi target potong maka semakin panjang panjang egrek yang dibutuhkan. Selain itu, semakin tinggi ukuran tubuh pemanen yang diwakilkan oleh persentil 50 dan 95 maka panjang egrek yang dibutuhkan semakin kecil. Hal ini dikarenakan semakin panjang lengan maka semakin mudah lengan untuk menjangkau egrek. Sehingga panjang egrek yang dibutuhkan semakin pendek. Sama halnya dengan jarak aman, semakin pendek panjang egrek maka semakin kecil resiko terjadi lenturan yang akan memudahkan pemanen dalam proses pemotongan pelepah dan tandan.
Analisis Biomekanika
Analisis biomekanika saat kondisi ambang batas ekstrim
Analisis biomekanika dilakukan pada model antropometri saat kondisi ambang batas ekstrim agar didapat batas resiko beban yang diterima pemanen. Analisis ini dilakukan pada dua postur gerakan yaitu gerakan awal sebelum pemotongan dan gerakan akhir setelah pemotongan, untuk segmen tubuh leher, bahu dan lengan bawah. Segmen-segmen tubuh tersebut menahan beban dalam keadaan statik mengikuti hukum kesetimbangan benda.
Contoh analisis biomekanika pada segmen leher dapat dilihat pada Gambar 12.
Gambar 12 Diagram gaya pada segmen tubuh leher
23 merupakan besarnya momen gaya yang dibutuhkan leher agar dapat menahan gaya berat (W) agar tetap setimbang. Gaya yang berlawanan dengan arah gaya F adalah W cos a dan gaya yang berlawanan dengan gaya W adalah F cos a. Sudut a merupakan sudut yang terbentuk antara garis gaya F dengan sudut normal. Dari gambaran gaya tersebut didapat persamaan mekanika yang dijelaskan pada Persamaan 7, 8 dan 9.
MA=0……….. 7
-F AB + Wcos a AB=0… 8 F= W cos a………(9)
24
Gambar 13 Diagram gaya pada segmen bahu untuk sudut fleksi ≥ 90°
MA=0………...(10)
Fmy cos b AB - Fmxsin b AB– W cos b AC – We (cos b AC + cos c CD) + Ftx(sinb AC + sin c CD) –Fty (cos b AC + cos c CD) = 0...(11)
Fm (sin e cos b AB) + Fm (cos e sin b AB) - W cos b AC– We (cos b AC + cos c CD) + Ftsin d (sin b AC + sin c CD) –Ftcos d (cos b AC + cos c CD) = 0...(12) Fm=W cos b AC + We (cos b AC +cos c CD)- Ft sin d (sin b AC + sin c CD) + Ft cos d (cos b AC + cos c CD)/ (sin e cos b AB) + (cos e sin b AB)...(13)
25 MA=0………...(14)
Fmy cos b AB - Fmxsin b AB– W cos b AC – We (cos b AC + cos c CD) + Ftx(sinb AC + sin c CD) –Fty (cos b AC + cos c CD) = 0...(15)
Fm (sin (a+b)cos b AB) - Fm (cos (a+b) sin b AB) - W cos b AC– We (cos b AC + cos c CD) + Ftsin d (sin b AC + sin c CD) –Ftcos d (cos b AC + cos c CD) = 0...(16) Fm=W cos b AC + We (cos b AC +cos c CD)- Ft sin d (sin b AC + sin c CD) + Ft cos d (cos b AC + cos c CD)/ (sin (a + b) cos b AB) – (cos (a+b) sin b AB)...(17) Ada dua analisis biomekanika pada lengan bawah yang menghasilkan dua macam model berdasarkan sudut fleksi gerakan ≥ 30° dan ≤ 30° yang dapat diilustrasikan dalam diagram gaya pada contoh Gambar 15 dan 16. Gambar-gambar tersebut terdiri dari link lengan atas yang dibatasi sendi siku, link lengan bawah yang dibatasi oleh sendi siku dan sendi pergelangan tangan. Lengan bawah digambarkan melakukan gerakan fleksi. Dari gambar tersebut dapat digambarkan gaya-gaya yang terjadi. Sama dengan analisis biomekanik dengan bahu, pada lengan bawah terdapat momen gaya pada otot branchioradialis (Fm), gaya dari dalam pussat massa lengan bawah (W), gaya luar yang terdiri dari gaya berat pada pussat massa egrek (We), gaya tarik pelepah atau tandan (Ft). Persamaan model biomekanik lengan bawah pada contoh Gambar 15 dijelaskan pada persamaan 18, 19, 20 dan 21 sedangkan pada Gambar 16 dijelaskan pada persamaan 22, 23, 24 dan 25.
26
MA=0………..………(18)
Fmy cos b AB + Fmxsin b AB– W cos b AC– We cos b AD + Ftxsin b AD–Fty cos b AD = 0………..(19)
Fm (sin e cos b AB) + Fm (cos e sin b AB) - W cos b AC– We cos b AD + Ftsin d sin b AD–Ftcos d cos b AD=0………..…...………...(20) Fm= cos b A + e(sin cos e cos b ADb A ) + (cos - t sin d sin e sin b AD+b A ) t cos d cos b AD
(21)
Gambar 16 Diagram gaya pada segmen lengan bawah untuk sudut fleksi ≤ 30°
MA=0………..………(22)
Fmy cos b AB + Fmxsin b AB– W cos b AC– We cos b AD + Ftxsin b AD–Fty cos b AD = 0………..(23)
Fm (sin (-cos e cos b AB) + Fm (sin e sin b AB) - W cos b AC– We cos b AD + Ftsin d sin b AD–Ftcos d cos b AD=0…………..…...………...(24) Fm= cos b A + e cos b AD- t sin d sin b AD+ t cos d cos b AD
(-cos e cos b A ) + (sin e sin b A )
(25)
27 Hasil perhitungan beban biomekanik pada bahu dan lengan bawah pada kondisi ambang batas ekstrim disajikan pada Tabel 3.
Tabel 3 Batas beban yang masih dapat diterima pada bahu dan lengan bawah Postur lengan bawah pada postur gerakan awal dan gerakan akhir pada lengan 1 (kanan) dan lengan 2 (kiri). Dari data pada tabel di atas dapat dilihat secara umum bahwa besarnya beban pada lengan bawah lebih besar dari bahu dalam postur gerakan akhir. Hal ini dikarenakan, secara umum dalam diagram gaya, link lengan bawah terkena dampak langsung dari gaya eksternal yaitu gaya berat pada pusat massa egrek (We) dan gaya pemotongan pelepah atau tandan (Ft). Besarnya beban di otot branchioradialis pada lengan bawah untuk gerakan akhir yaitu antara 782.75 N-1145.80 N menunjukkan bahwa pada saat menarik, otot branchioradialis melakukan fleksi yang sangat kuat karena otot ini merupakan otot superfisial pada sisi radial (sisi ibu jari), siku dan lengan bawah yang berhubungan dengan otot fleksor jari superfisialis yang berfungsi untuk melakukan fleksi di keempat jari dan pergelangan tangan. Otot ini berperan penting dalam fleksi yang kuat terhadap tahanan (Sloane 1994). Fleksi keempat jari dan pergelangan tangan ini lebih kuat dari bahu, ditunjukkan dengan besarnya beban pada otot branchioradialis. Hal ini menunjukkan bahwa cengkraman jari dan pergelangan tangan kuat terhadap tahanan yang ada pada permukaan batang egrek saat melakukan gerakan menarik untuk pemotongan pelepah dan tandan kelapa sawit. Cengkraman tangan yang kuat ini menunjukkan resiko beban fisik pada tangan yang tinggi. Agar pekerjaan dilakukan secara aman, maka kontak fisik antara tangan dan permukaan egrek harus dikurangi misalnya dengan penggunaan sarung tangan dan penambahan grip pada pegangan egrek.
28
dengan berbagai bahan. Penurunan kekuatan genggaman tangan ini menghasilkan konsekuensi negatif seperti terlepasnya alat, rendahnya kontrol pada tangan, kualitas kerja yang buruk dan meningkatnya kelelahan otot (Sanders dan Cormick 1993). Sehingga pembuatan grip pada pegangan egrek dapat direkomendasikan untuk diaplikasikan pada proses pemotongan pelepah dan tandan agar dapat meningkatkan kekuatan genggaman tangan.
Gambar 17 Persentase kekuatan genggaman terhadap berbagai tipe sarung tangan (Wang et al. 1987) dalam (Sanders dan Cormick 1993)
Pada segmen bahu dan lengan bawah, semua beban pada postur gerakan awal lebih besar daripada gerakan akhir. Beban yang besar pada postur awal ini menunjukkan bahwa besarnya kekuatan otot untuk memulai menarik dan setelah menarik, kekuatan otot berkurang. Pada bahu, beban pada gerakan akhir berkurang dengan penurunan sudut fleksi bahu terhadap punggung sedangkan pada lengan bawah beban berkurang dengan peningkatan sudut fleksi pada lengan terhadap lengan atas. Hal ini menunjukkan bahwa penurunan sudut fleksi sebanding dengan penurunan beban pada bahu sebaliknya penambahan sudut fleksi pada lengan bawah menyebabkan pengurangan beban.
Hasil analisis biomekanik yang telah dilakukan pada kondisi ambang batas ekstrim pemanenan dapat dijadikan batasan beban yang masih dapat diterima untuk selanjutkan dijadikan dasar postur pemanenan yang disarankan. Batas beban yang disarankan diambil dari beban maksimal (critical load) yang terjadi pada simulasi tersebut yaitu 21.85 N untuk otot leher, 1091.96 N untuk otot deltoid bahu dan 1634.31 N untuk otot branchioradialis lengan bawah.
Diagnosa beban biomekanik pada postur saat ini
29
Gambar 18 Pemotongan pelepah dan tandan pada kondisi real di lapangan Gambar 18 menunjukkan pemanen memanen pelepah dan tandan pada jarak yang relatif dekat. Jarak yang dekat ini dicerminkan oleh sudut yang terbentuk antara pohon dan galah egrek ( ) yang lebih kecil dari sudut yang disarankan agar postur pemanen aman menurut selang alami gerakan yaitu 29°. Hal ini menyebabkan pemanen melakukan gerak ekstensi leher yang melebihi ambang batas aman yaitu 44° dengan menghasilkan sudut antara egrek dengan pohon ( lebih kecil dari sudut pada simulasi postur pemanenan yang disarankan yaitu 23°. Kecenderungan pemanen untuk memanen pada jarak yang dekat dilakukan karena memanen dengan jarak yang lebih dekat lebih ringan karena panjang egrek yang dibutuhkan semakin pendek. Hal tersebut menyebabkan resiko terjadi lenturan saat menarik egrek semakin kecil.
30
a
Keterangan :
a
Pengelompokkan zona berdasarkan Openshaw (2006) dengan modifikasi penerjemahan kategori zona.
Gambar 19 Gambar postur model anthropometri pada postur yang disarankan (A) dan postur saat ini (B)
Pada postur saat ini (B), leher melakukan gerak ekstensi terhadap punggung sebesar 44°. Sudut tersebut lebih besar dari sudut ekstensi yang dihasilkan oleh postur yang disarankan (A) yang memiliki sudut ekstensi pada ambang batas ekstrim yaitu 30°. Sudut ekstensi 44° pada leher sudah masuk ke dalam zona 3 yaitu gerakan yang dikategorikan pada zona bahaya. Meningkatnya tingkat resiko gerak pada leher ini disebabkan oleh semakin dekatnya jarak pemanenan yang disimulasikan sepanjang 1 m, dibandingkan simulasi postur yang disarankan yang menghasilkan minimum jarak aman sepanjang 1.5 m. Semakin pendek jarak pemanenan antara pemanen dengan pangkal batang target potong maka jarak pandang pemanen terhadap target potong akan semakin terbatas. Pilihannya, leher akan bergerak ke belakang agar dapat meningkatkan jarak pandang.
Berbeda dengan leher yang mengalami penambahan sudut ekstensi, pada postur saat ini untuk segmen tubuh bahu mengalami penurunan sudut fleksi. Bahu kanan melakukan gerakan fleksi sebesar 12° terhadap punggung. Sudut tersebut
31 menurun dibandingkan dengan postur yang disarankan yang memiliki sudut fleksi sebesar 28° terhadap punggung. Hal yang sama juga terjadi pada bahu kiri yang melakukan gerakan fleksi menghasilkan sudut fleksi sebesar 49°, menurun dibandingkan dengan postur yang disarankan. Sudut fleksi pada postur yang disarankan untuk bahu kiri sebesar 64°. Walaupun demikian, pada kedua postur untuk segmen tubuh bahu masih tergolong gerakan aman (zona 1).
Bebanding terbalik dengan bahu, jika saat kegiatan menarik egrek, bahu mengalami penurunan sudut fleksi maka lengan bawah mengalami penambahan sudut fleksi. Lengan bawah sebelah kanan melakukan gerakan fleksi sebesar 119° terhadap lengan atas dan lengan bawah sebelah kiri juga melakukan gerakan fleksi yang menghasilkan sudut sebesar 96° terhadap lengan atas. Kedua lengan kanan dan kiri pada postur saat ini mengalami peningkatan sudut fleksi dibandingkan postur yang disarankan yang memiliki sudut fleksi pada lengan bawah sebelah kanan dan kiri secara berturut-turut yaitu 90° dan 50° terhadap lengan atas. Sudut fleksi yang dihasilkan oleh lengan bawah terhadap lengan atas pada kedua postur masih masuk ke dalam zona 1 yaitu zona dimana gerakannya masih dikategorikan aman. Pada postur saat ini, anggota gerak atas seperti leher, bahu dan lengan bawah mengalami perubahan gerakan, baik penambahan maupun penurunan sudut pada sendi yang terkait. Sedangkan pada anggota gerak tubuh bawah seperti tungkai atas dan tungkai bawah disimulasikan sama agar terlihat jelas perbedaan yang terjadi pada anggota gerak tubuh atas untuk kedua jenis postur.
Dari gambar diatas, dua jenis postur yang akan dikaji beban biomekaniknya yaitu postur yang mengikuti aturan jarak aman dari simulasi ambang batas ekstrim (postur yang disarankan) dan postur nyata yang ada di lapang (postur saat ini). Dari kedua postur tersebut kita dapat menganalis beban biomekaniknya. Hasil analisis biomekanik pada leher disajikan pada Gambar 20.
Gambar 20 Hasil analisis biomekanik pada leher untuk postur yang disarankan
dan postur saat ini
32
yang melebihi Critical Range of Motion (CRM) atau yang telah melebihi ambang batas aman. Sehingga dapat disimpulkan pertambahan sudut pada gerakan ekstensi leher mempengaruhi penambahan beban pada leher khususnya pada otot splenius kepala dan leher yang menyebabkan gerakan ekstensi pada kepala dan leher.
Gambar 21 Grafik perbandingan beban mekanik pada postur yang disarankan dan postur saat ini
Perbandingan beban biomekanik di segmen tubuh bahu dan lengan bawah pada postur yang disarankan dan postur saat ini disajikan pada Gambar 21. Grafik tersebut menunjukkan bahwa hampir semua beban pada postur saat ini di bahu dan lengan bawah lebih kecil daripada postur yang disarankan. Hal ini dikarenakan pada postur saat ini, anggota tubuh gerak atas seperti bahu dan lengan bawah mudah menjangkau egrek karena sudut yang kecil. Selain itu, sudut yang kecil ini membuat jarak pemanenan semakin pendek. Jarak pemanenan yang pendek menyebabkan panjang egrek yang dibutuhkan semakin pendek. Hal ini menyebabkan resiko terjadinya lenturan pada batang egrek semakin kecil. Berkurangnya lenturan pada batang egrek menyebabkan pemanen memanen dengan mudah tanpa bertambahnya beban akibat terjadinya lenturan. Hal-hal tersebut yang membuat beban lengan pada postur saat ini lebih kecil.
Dari simulasi model antropometri pemanenan pada postur saat ini dapat disimpulkan bahwa, terjadi penurunan beban pada segmen lengan yaitu bahu dan lengan bawah, namun diiringi peningkatan beban pada segmen leher. Meskipun demikian, dengan mempertimbangan resiko postur dan resiko beban, segmen leher merupakan bagian tubuh yang harus diprioritaskan karena tidak hanya memiliki resiko postur tapi juga memiliki resiko beban sehingga dampak resikonya lebih besar. Sedangkan pada bahu dan lengan, meskipun juga mempunyai resiko postur namun resiko beban yang terjadi kecil. Resiko ergonomi yang terjadi pada postur yang disarankan dan postur yang ada di lapang (existing posture) sudah didiagnosa dalam model biomekanik yang telah dibangun. Namun
33 penggambaran dan perhitungan yang dilakukan masih menggunakan cara manual sehingga lebih baik jika dibangun sebuah program yang secara otomatis dapat mendiagnosa resiko ergonomi yang terjadi dalam setiap gerakan dengan formula jarak aman dan panjang egrek yang dibutuhkan serta model biomekanik yang telah dibangun sebelumnya.
5
SIMPULAN DAN SARAN
Simpulan
Dari hasil penelitian diatas dapat disimpulkan beberapa poin sebagai berikut : 1. Formula jarak aman (dt) dan panjang egrek yang dibutuhkan (Lp) pada
proses pemanenan kelapa sawit yaitu dt (m) = 0.5(Ht-Hs) + 0.35 dan Lp = (Ht-Hs)/cos dimana Ht adalah tinggi target potong dan Hs adalah tinggi bahu pemanen.
2. Pemanenan kelapa sawit dengan tinggi target pohon lebih dari 16 m sudah tidak aman untuk dilakukan secara manual dengan menggunakan egrek. 3. Berdasarkan kriteria selang gerak alami tubuh manusia, Critical Range of
Motion (CRM) pada gerak pemanenan adalah : leher ekstensi (30°), bahu fleksi (94°), lengan bawah fleksi (124°)
4. Berdasarkan hasil analisis biomekanika gerak panen, diketahui bahwa distribusi beban (critical load) otot pada kondisi CRM adalah 21.85 N pada otot splenius (leher), 1091.96 N pada otot deltoid (bahu) dan 1634.31 N untuk otot branchioradialis (lengan bawah).
5. Hasil analisis biomekanik terhadap postur kerja pemanenan yang ada di lapang saat ini (existing posture), disimpulkan bahwa resiko ergonomi pada bahu dan lengan bawah relatif lebih kecil dari Critical Load (CL)dan Critical Range of Motion (CRM), namun demikian pada leher, CL dan CRMsudah melewati ambang batas yang diterima. Oleh karena itu, postur ini direkomendasikan untuk tidak dilakukan dan perlu diperbaiki dengan menggunakan postur yang disarankan.
6. Postur yang disarankan untuk dilakukan adalah : ekstensi leher ≤ 30° (21.85 N), fleksi bahu ≤ 94° (1091.96 N), fleksi lengan bawah ≤ 124° (1634.31 N).
34
Saran
Model diagnostik resiko ergonomi dapat dijadikan dasar pembuatan sebuah program yang dapat mendiagnosa resiko ergonomi pada pemanenan kelapa sawit. Selain itu disarankan juga untuk dilakukan perbaikan pola kerja, desain alat atau kondisi kebun.
DAFTAR PUSTAKA
Anatomy Atlases. 1995. Atlas of Human Anatomy :Head, Trunk, and Arm Muscles, at The Anterior Surface of The Body.[internet].[diunduh 2014 Agustus
9].Tersediapada :http//www.anatomyatlases.org/atlasofanatomy/plate12/01n eckbackarm.shtml
[BPS] Badan Pusat Statistik. 2009. Produksi Minyak Kelapa Sawit tahun 2005-2010. Jakarta: Badan Pusat Statistik.
Bridger RS. 2002. Introduction to Ergonomics. London & Newyork :Taylor & Francis.
Dhafir M. 2012. Analisis Biomekanik, Studi Gerak dan Waktu pada Pengoperasian Traktor Tangan. [tesis]. Bogor : Institut Pertanian Bogor. Dewi NS. 2013. Studi Gerak dan Aplikasinya untuk Peningkatan efektivitas dan
Keselamatan Kerja Pemanenan Kelapa Sawit Secara Manual. [skripsi]. Bogor : Institut Pertanian Bogor.
[FAO] Food and Agriculture Organization. 2002. Small-Scale Palm oil processing in Africa. FAO Agricultural Services ulletin 148 ISSN 1010-1365. Rome, Italy.
[FAO]Food and Agriculture Organization.2010.FAO Production Statistic (FAO ProdSTAT).[internet].[diunduh 2014 April 20]. Tersedia pada : http://faostat.fao.org/site/339/default.aspx
Hagen KB. 2006 .Biomechanical Analysis of Spinal Load in Motor-Manual Cutting. Journal of Forest Engineering. Halaman 39-41
Hartanto D. 2000. Skripsi. Pengembangan Model Biomekanika Statis Tiga Dimensi dan Model Biomekanika Dinamik Tiga Dimensi serta Studi Penggunaan dalam Pekerjaan Pengangkutan/Penurunan Material Secara Manual. [skripsi]. Bandung : Jurusan Teknik Industri, ITB,
Hendra, Rahardjo S. 2009. Risiko Ergononomi dan Keluhan Musculoskeletal Disorders (MSDs) pada Pekerja Panen Kelapa Sawit. Prosiding Seminar Nasional Ergonomi IX Semarang. Halaman 27-32
Hussain I.2008.Biomechanical Analysis of Cricket Ball Throwing Technique. Journal of Education and Practice.Halaman 3[internet].[diunduh 2014 April 20]. Tersedia pada : www.iiste.org.
35 Intara YI. 2005. Analisis Gaya Spesifik Pemotongan Parenkim Pelepah dan
Batang Tandan Sawit [tesis]. Bogor : Institut Pertanian Bogor
Jung MC, Haight J, Hallbeck MS. 2007. Biomechanical and Physiological
Analyses of a Luggage-Pulling Task. Industrial Health . Halaman 756–765
Kiswanto, Jamhari HP, Bambang W. 2008. Teknologi Budidaya Kelapa Sawit. Balai Besar Pengkajian dan Pengembangan Teknologi Pertanian.Bogor
Knudson D.2007. Fundamentals of Biomechanic (2th ed).New York : Springer
Kroemer KHE, Grandjean E. 1997. Fitting the Task to The Human, (5th ed). London: Taylor and Francis
Nurmianto E. 2004. Ergonomi Konsep Dasar dan Aplikasinya. Ed ke-2. Surabaya: Guna Widya.
Openshaw S, Taylor E. 2006. Ergonomics and Design A Reference Guide. [e-book] Allsteel inc.[diunduh 20 Mei 2012]. Tersedia pada: http://www.allsteeloffice.com/ergo.
Pahan I. 2008. Panduan Lengkap Kelapa Sawit : Manajemen Agribisnis dari Hulu hingga Hilir. Jakarta. Niaga Swadaya.
[PPKS] Pusat Penelitian Kelapa Sawit. 2007. Budidaya Kelapa Sawit.Pusat Penelitian Kela Sawit. Jakarta
Rohman AMH. 2008. Studi Gerak dan Waktu dengan Analisis Biomekanika pada Proses Panen Tebu di PG. Bungamayang, Lampung [skripsi]. Bogor : Institut Pertanian Bogor.
Saladin KS. 2011. Human Anatomy Third Edition. McGraw Hill. New Delhi Sanders SM, Mc Cormick. 1993.Human Factor Engineering and Design Seventh
Edition. McGraw Hill. New Delhi.
Sloane E.1994. Anatomy and Physiology: An Easy Learner.Jones and Barlett Publishers, Inc. Sudbury
Syuaib MF, Herodian S, Hidayat DA, Fil‟aini R, Sari TN, Putranti KA. 2012. Laporan Hasil Kajian Ergonomika untuk Penyempurnaan Sistem dan Produktivitas Kerja Panen-muat Sawit di kebun PT Astra Agro Lestari. FATETA. IPB.
Syuaib M.F. 2003. Ergonomics Study on The Process of Mastering Tractor Operation [disertasi]. Tokyo: Tokyo University of Agriculture and Technology.
Tayyari F, Smith JL. 1997. Occupational Ergonomics, Principels and Applications (1st ed). Chapman and Hall : London
Tozeren A. 2000. Human Body Dynamics: Classical Mechanics and Human Movement.Springer : New York
[USDA] United States Department of Agriculture. 2010. Indonesia: Rising Global
Demand Fuels Palm Oil Expansion.[internet].[diunduh 2014 April 20]. Tersedia pada : www.usda.org
Winter DA. 1979. iomechanics of Human Movement. Wiley.Michigan
36
Lampiran 1a Data sudut gerak pemanenan dan pengklasifikasiannya ke dalam zona gerak berdasarkan selang gerak alami (Dewi 2013)
Tabel 1 Data selang gerak pemanen dengan menggunakan dodos (D) pada lahan datar (F) untuk tinggi target potong maksimal 3 m
S Ef Sf Se Bf Be Hf He Lf Kf
Tabel 2 Data selang gerak pemanen dengan menggunakan egrek (E1) pada lahan datar (F) untuk kategori tinggi target potong maksimal 3 m
S Ef Sf Se Bf Be Hf He Lf Kf
Tabel 3 Data selang gerak pemanen dengan menggunakan egrek (E2) pada lahan datar (F) untuk kategori tinggi target potong 3-6 m
37 Tabel 4 Data selang gerak pemanen dengan menggunakan egrek (E3) pada lahan
datar (F) untuk kategori tinggi target potong 6-12 m
S Ef Sf Se Bf Be Hf He Lf Kf
Tabel 5 Data selang gerak pemanen dengan menggunakan egrek (E3) pada lahan rolling (R) untuk kategori tinggi target potong 6-12 m
S Ef Sf Se Bf Be Hf He Lf Kf
Tabel 6 Data selang gerak pemanen dengan menggunakan egrek (E4) pada lahan datar (F) untuk kategori tinggi target potong 12-18 m
S Ef Sf Se Bf Be Hf He Lf Kf
R = Bagian anggota tubuh sebelah kanan, L = Bagian anggota tubuh sebelah kanan
38
Lampiran 2a Data antropometri pemanen pada ketiga lokasi penelitianb (n=141) No Parameter Pengukuran Rata-10 Jangkauan tangan keatas terbuka 201.78 9.46 175.60 222.20 187.80 202.00 217.80 11 Jangkauan tangan keatas menggenggam 192.08 9.51 166.00 215.00 178.00 192.00 208.00 12 Jangkauan tangan kedepan terbuka 76.11 6.15 61.20 87.20 66.50 77.00 85.00 13 Jangkauan tangan kedepan menggenggam 65.85 5.17 54.90 89.30 57.70 66.00 73.50 14 Jengkal 2 tangan kesamping terbuka 165.64 13.98 60.60 196.50 152.50 167.30 178.00 15 Jengkal 2 tangan kesamping menggenggam 147.29 7.41 127.00 169.70 135.50 147.00 157.90 16 Jengkal 2 siku 84.25 6.07 56.50 99.00 73.00 84.60 93.00 33 Jangkauan tangan keatas terbuka 125.40 6.74 105.40 153.40 114.20 125.40 135.60 34 Jangkauan tangan keatas menggenggam 115.04 6.65 91.90 133.40 105.00 114.30 126.80 35 Tinggi lutut 48.68 2.98 40.20 58.00 44.50 49.00 53.00
Penelitian dilakukan di PT Sari Lembah Subur, Riau, PT Waru Kaltim Plantation, Kalimantan Timur dan PT Pasangkayu, Sulawesi Barat
c