PENGEMBANGAN SISTEM KENDALI IRIGASI UNTUK
BUDIDAYA PADI SRI (
SYSTEM OF RICE INTENSIFICATION)
YANG RAMAH LINGKUNGAN
RILSAN MALKHI PANDAPOTAN
DEPARTEMEN TEKNIK SIPIL DAN LINGKUNGAN FAKULTAS TEKNOLOGI PERTANIAN
PERNYATAAN MENGENAI SKRIPSI DAN SUMBER
INFORMASI
Dengan ini saya menyatakan bahwa skripsi berjudul Pengembangan Sistem Kendali Irigasi untuk Budidaya Padi SRI (System of Rice Intensification) yang Ramah Lingkungan adalah benar karya saya dengan arahan dari komisi pembimbing dan belum diajukan dalam bentuk apapun kepada perguruan tinggi manapun. Sumber informasi yang berasal atau dikutip dari karya yang diterbitkan maupun tidak diterbitkan dari penulis lain telah disebutkan dalam teks dan dicantumkan dalam daftar pustaka di bagian akhir skripsi ini.
Dengan ini saya melimpahkan hak cipta dari karya tulis saya kepada Institut Pertanian Bogor.
Bogor, Januari 2016
ABSTRAK
RILSAN MALKHI PANDAPOTAN. Pengembangan Sistem Kendali Irigasi untuk Budidaya Padi SRI (System Of Rice Intensification) yang Ramah Lingkungan. Dibimbing oleh YUDI CHADIRIN dan CHUSNUL ARIF.
Pengembangan budidaya padi berkelanjutan di masa depan memiliki banyak tantangan dan salah satunya adalah masalah penyediaan air. SRI (system of rice intensification) merupakan salah satu metode yang mampu menjawab tantangan tersebut. Tujuan penelitian ini adalah mengembangkan sistem kendali fuzzy yang mengatur secara otomatis tinggi muka air di lahan untuk budidaya padi metode SRI dan melakukan evaluasi performa sistem kendali fuzzy untuk menghemat penggunaan air dengan mempertimbangkan pengaruh cuaca. Penelitian dilakukan di Cikarawang, Dramaga – Bogor, dari bulan Maret - September 2015. Sistem kendali dikembangkan dengan defuzzifikasi metode Sugeno dan microcontroller arduino uno. Pemantauan kondisi cuaca dan tanah dilakukan sepanjang musim tanam. Pada uji skala laboratorium seluruh hasil menunjukkan MAPE (mean absolute percentage error) < 25 %. Selanjutnya nilai tinggi muka air, air teraplikasi dan air yang terbuang dihitung berdasarkan skala lapang secara simulasi. Dari hasil penelitian ternyata sistem kendali mampu menghemat air 3-21% dibandingkan sistem tata air konvensional yang ditetapkan oleh petani.
Kata kunci: arduino, sistem kendali fuzzy, metode Sugeno, system of rice intensification, tinggi muka air
ABSTRACT
RILSAN MALKHI PANDAPOTAN. Development of Irrigation Control System for Environmentally Friendly System of Rice Intensification Cultivation. Supervised by YUDI CHADIRIN and CHUSNUL ARIF.
The development of sustainable rice cultivation in the future has many challenges and one of them is water supply. SRI (system of rice intensification) is one of solution for that challenge. The purpose of this research were to develop a fuzzy control system that control water level in the field for paddy cultivation by SRI method and to evaluate the system performance for water-saving based on weather condition. The research was done in Cikarawang, Dramaga - Bogor from March - September 2015. Control system was developed using Sugeno defuzzification method and microcontroller arduino uno. Weather and soil condition had been monitored continuously during cultivation period. All result in laboratory scale test showed MAPE (mean absolute percentage error) < 25%. Next, water level, applied water and drained water were calculated based on field scale by simulation. The result showed that the computerized system could save 3-21% of water compare to farmer’s conventional water management method.
PENGEMBANGAN SISTEM KENDALI IRIGASI UNTUK
BUDIDAYA PADI SRI (
SYSTEM OF RICE INTENSIFICATION)
YANG RAMAH LINGKUNGAN
RILSAN MALKHI PANDAPOTAN
Skripsi
sebagai salah satu syarat untuk memperoleh gelar Sarjana Teknik
pada
Departemen Teknik Sipil dan Lingkungan
DEPARTEMEN TEKNIK SIPIL DAN LINGKUNGAN FAKULTAS TEKNOLOGI PERTANIAN
Judul : Pengembangan Sistem Kendali Irigasi Untuk Budidaya Padi SRI (System of Rice Intensification) yang Ramah Lingkungan
Nama : Rilsan Malkhi Pandapotan NIM : F44110077
Disetujui oleh
Diketahui oleh
Dr. Ir.Nora Pandjaitan, DEA Ketua Departemen
Tanggal Lulus :
Dr. Yudi Chadirin, S.TP, M.Agr
Pembimbing I
Dr. Chusnul Arif, STP, M.Si
PRAKATA
Puji syukur kepada Tuhan Yang Maha Esa karena berkat dan rahmatnya karya ilmiah yang berjudul “Pengembangan Sistem Kendali Irigasi untuk Budidaya Padi SRI (System of Rice Intensification) yang Ramah Lingkungan” dapat diselesaikan. Karya ilmiah ini merupakan salah satu syarat untuk memperoleh gelar Sarjana Teknik dan proses penelitian telah dilaksanakan sejak bulan Maret sampai bulan September 2015.
Pada kesempatan ini disampaikan terima kasih kepada :
1. Dr. Yudi Chadirin, S.TP, M.Agr dan Dr. Chusnul Arif, STP, M.Si sebagai dosen pembimbing skripsi yang telah banyak memberikan arahan dan ilmu dalam penulisan laporan penelitian ini.
2. Dr. Rudiyanto S.TP, M.Si selaku dosen penguji yang telah memberi masukan kepada penulis.
3. Bapak Paingot Sidauruk, Ibu Rosti Sibarani, Putra Harry, dan Rodo Yafo, keluarga saya yang telah menyayangi, memberikan motivasi, dan insipirasi setiap hari.
4. Rekan-rekan satu bimbingan tugas akhir : Briza Sibarani, Aulia Azizah, Dyah Manggandari, Chau A, Chariem, dan Ulya Rufako.
5. Rekan-rekan di Departemen Teknik Sipil dan Lingkungan Institut Pertanian Bogor Angkatan 48 (SIL 48) khususnya Hasfan dan Hesekiel.
6. Rekan-rekan camp kopral, rekan-rekan Kopelkhu, dan Combat 48 atas semangat serta dukungannya.
7. Semua pihak yang telah membantu dalam penelitian dan pembuatan skripsi ini yang tidak dapat disebutkan satu persatu.
Terdapat banyak kekurangan yang dirasakan dalam penyusunan karya ilmiah ini, oleh karena itu masukan, baik kritik maupun saran sangat diharapkan untuk dapat memperbaiki kekurangan yang ada. Semoga hasil penelitian ini dapat bermanfaat bagi yang memerlukan.
DAFTAR ISI
DAFTAR TABEL iv
DAFTAR GAMBAR iv
DAFTAR LAMPIRAN iv
PENDAHULUAN 1
Latar Belakang 1
Perumusan Masalah 2
Tujuan Penelitian 2
Manfaat Penelitian 2
Ruang Lingkup 3
TINJAUAN PUSTAKA 3
Budidaya SRI 3
Sistem Irigasi 4
Sistem Kendali Logika Fuzzy 4
METODE PENELITIAN 6
Waktu dan Tempat Penelitian 6
Alat dan Bahan 6
Prosedur Penelitian 6
HASIL DAN PEMBAHASAN 13
Data Cuaca 13
Pengembangan Simulasi 14
Aplikasi Sistem Kendali 18
SIMPULAN DAN SARAN 20
Simpulan 20
Saran 20
DAFTAR PUSTAKA 20
LAMPIRAN 22
DAFTAR TABEL
1 Matriks keputusan untuk keluaran berupa waktu bukaan valve 9
2 Penggunaan air simulasi aktual sistem 17
3 Keseimbangan air di masing- masing lahan tanpa sistem kendali 19 4 Keseimbangan air di masing- masing lahan dengan sistem kendali 19 5 Penghematan air yang terjadi dari kegunaan sistem kendali 20
DAFTAR GAMBAR
1 Himpunan keanggotaan logika fuzzy 5
2 Skema Keseimbangan air di lahan 7
3 Himpunan keanggotaan dari masukan error (cm) 9
4 Himpunan keanggotaan dari masukan delta errorr (cm) 9 5 Grafik sistem irigasi rezim air tergenang (RT) (Sujono 2011) 10 6 Grafik sistem irigasi rezim air basah (RB) (Sujono 2011) 10 7 Grafik sistem irigasi rezim rezim air kering (RK) 11
8 Skema sistem kendali tinggi muka air di lahan 12
9 Proses defuzzifikasi dengan program MATLAB 12
10 Pengamatan kondisi tanah dan cuaca pada rezim tergenang 13 11 Pengamatan kondisi tanah dan cuaca pada rezim basah 13 12 Pengamatan kondisi tanah dan cuaca pada rezim kering 14 13 Kalibrasi sensor tinggi muka air E-Tape 30 rezim tergenang 15 14 Kalibrasi sensor tinggi muka air E-Tape 30 rezim basah 15 15 Kalibrasi sensor tinggi muka air E-Tape 30 rezim kering 15 16 Kalibrasi sensor tinggi muka air E-Tape 30 Arduino 15 17 Simulasi aktual untuk untuk budidaya rezim tergenang 16 18 Simulasi aktual untuk untuk budidaya rezim basah 16 19 Simulasi aktual untuk untuk budidaya rezim kering 17
20 Simulasi lapang budidaya rezim tergenang 18
21 Simulasi lapang budidaya rezim basah 18
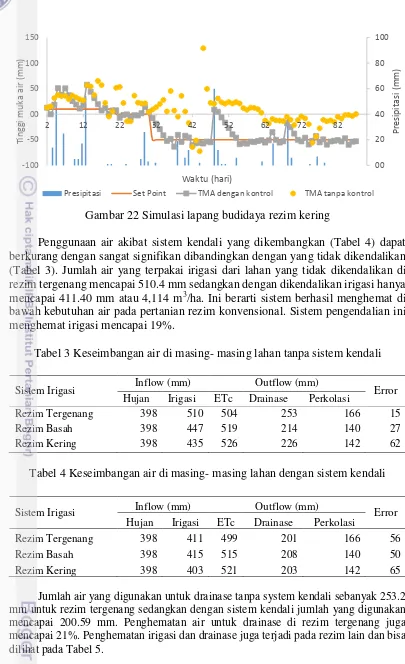
22 Simulasi lapang budidaya rezim basah 19
DAFTAR LAMPIRAN
1 Diagram proses penelitian 22
2 Foto rangkaian alat 24
3 Bahasa pemrograman kendali di Arduino 25
4 Persamaan dari fungsi keanggotaan input dan output 27
1
PENDAHULUAN
Latar Belakang
Komoditas padi merupakan komoditas pertanian yang paling banyak dikonsumsi di Indonesia. Kepopuleran komoditas padi membuat padi menjadi kebutuhan pokok di Indonesia. Menurut data Badan Pusat Statistik (BPS) jumlah penduduk di Indonesia 237,641,326 jiwa pada tahun 2010 dan akan bertambah sampai lebih dari 300 juta jiwa pada 2035 (BPS 2014). Data ini menunjukkan bahwa sekitar 200 juta jiwa konsumen beras perlu dipenuhi kebutuhannya dan angka itu akan terus bertambah. Keadaan ini mendesak pertanian dalam negeri perlu mengembangkan sistem pertanian yang mampu memenuhi kebutuhan pasar tersebut.
Pengembangan budidaya padi di masa depan memiliki banyak tantangan salah satunya adalah dalam penyediaan air. Hal ini menjadi tantangan besar karena sektor pertanian itu sendiri merupakan pengguna air tawar terbesar dan keberlanjutan pertanian amat bergantung dengan ketersediaan sumber daya air (Carr 2012). Menurut laporan World Water Council di tahun 2000 dalam Carr (2012) krisis air yang terjadi di berbagai belahan dunia dan permintaan air tawar yang terus meningkat sampai tahun 2015 mencapai 40%, dan masih dibutuhkan 17% air lagi untuk budidaya tanaman pangan dari air tawar yang tersedia. Kondisi menunjukkan bahwa diperlukan strategi, teknologi dan inovasi budidaya yang memperhatikan hasil produksi dan keberlangsungan sumber daya air yang ada. Budidaya padi secara umum membutuhkan air yang banyak pada sebagian fase pertumbuhannya. Hal ini masih terjadi dalam praktek budidaya padi konvensional di seluruh Indonesia. Bentuk budidaya ini dinilai tidak efektif jika dinilai dari penghematan air. Berdasarkan Dachlan (2009) pertanian konvensional membutuhkan air 6,000 m3 /ha sepanjang masa tanam dan ini menjadi tantangan buat pemerintah untuk terus membangun infrastruktur penyedia air yang dapat memenuhi kebutuhan sistem pertanian ini.
Bentuk pengembangan teknik budidaya padi yang cukup terkenal dewasa ini adalah system of rice intensification (SRI). Teknik ini merupakan salah satu cara budidaya yang mampu menjawab tantang krisis sumber daya air. Sistem ini terkenal dengan metodenya budidaya yang membutuhkan sedikit air. Sistem ini daur ekologis akan berlangsung baik karena memanfaatkan mikroorganisme tanah secara natural. Metode SRI dikembangkan oleh Fr. Henri de Laulanié, S.J bersama petani lokal di Madagaskar sekitar tahun 1983. SRI dapat meningkatkan produktivitas tanaman padi dan sejak tahun 1999 pengembangan SRI mulai dilakukan di luar Madagaskar, dengan bantuan Cornel International Institute for Food and Agriculture Development (CIIFAD) khususnya Profesor Norman Uphoff. SRI pertama diujicobakan dan dikembangkan di Indonesia di desa Budiasih, Kabupaten Ciamis Jawa Barat, pada periode 2002-2007. Sejak saat tersebut, penanaman padi dengan metode SRI terus berkembang, baik di Provinsi Jawa Barat dan provinsi lainnya di Indonesia (Dachlan 2009).
Sistem budidaya SRI memang belum banyak berkembang di Indonesia. Hal
2
dilakukan cara konvensional dengan menggenangi sawah terus menerus. Sistem budidaya konvensional ini kontra produktif terhadap dua hal. Pertama pertumbuhan tanaman akan melambat dan menyebabkan penurunan produksi, dan kedua jumlah air irigasi di hilir akan berkurang khususnya pada saat kekeringan di musim kemarau.
Penerapan budidaya SRI juga memiliki masalah di bagian teknis. Petani kesulitan untuk mengatur berapa jumlah irigasi yang tepat sesuai dengan metode SRI. Ketepatan pemberian air irigasi berarti tanaman memiliki air yang cukup di daerah perakarannya. Ketepatan pemberian air irigasi dapat dibantu dengan sistem kendali irigasi otomatis yang baik. Sistem kendali irigasi otomatis berfungsi memantau kondisi air di lahan, mengolah data kondisi lahan, mengambil keputusan dan melaksanakan kegiatan irigasi atau drainase dengan tepat dan otomatis setiap waktu tertentu. Keberadaan sistem kendali akan membantu petani memberikan irigasi dan drainase yang tepat dan hemat air.
Sistem kendali irigasi yang menggunakan logika fuzzy (FLC) lebih baik karena lebih dekat dengan cara berpikir manusia dalam mengelompokkan kondisi (Sen 2010). Sistem kendali fuzzy merupakan alat yang sangat baik untuk mengimplementasikan pengetahuan operator/manusia terhadap sistem ke dalam suatu logika kendali sehingga ketidakpastian pada sistem dapat ditangani (Birle dkk. 2013). Sistem kendali fuzzy juga dinilai lebih baik karena menghasilkan overshoot yang kecil dan sebentar dibandingkan dengan sistem kendali on-off. Overshoot adalah kondisi melencengnya nilai variabel terkontrol melebihi nilai yang diinginkan (Purnama 2013).
Perumusan Masalah
Permasalahan yang diangkat dalam penelitian ini adalah terbatasnya sumber daya air yang ada di bumi sedangkan budidaya padi membutuhkan air yang banyak. Metode budidaya yang dikenal cukup menjawab permasalahan ini adalah metode SRI karena tingkat kebutuhan air menjadi berkurang secara signifikan. Namun diperlukan sebuah sistem untuk mengatur masuk dan keluarnya air pada zona perakaran serta menjaga kadar air tanah. Sistem yang dikembangkan dibuat dalam skala pot dan dibangun berdasarkan pembuatan simulasi terlebih dahulu sehingga dapat dibandingkan apakah sistem bekerja sesuai yang diharapkan dalam simulasi.
Tujuan Penelitian
Tujuan dari penelitian ini diantaranya:
1. Mengembangkan simulasi sistem kendali fuzzy yang mengatur tinggi muka air (TMA) lahan untuk budidaya padi metode SRI
2. Melakukan uji coba performa sistem kendali fuzzy untuk irigasi dan drainase otomatis sederhana untuk budidaya SRI dengan mempertimbangkan pengaruh cuaca.
Manfaat Penelitian
3
1. Membantu proses pengaturan volume irigasi di lahan budidaya SRI secara komputasi dan otomatis
2. Sebagai referensi dalam pengembangan sistem irigasi otomatis pada lahan budidaya SRI.
Ruang Lingkup
Ruang lingkup penelitian mencakup pembuatan simulasi sistem kendali di komputer dan akan diaplikasikan secara sederhana di lapangan. Sistem kendali akan diuji performanya sepanjang musim tanam terhadap berbagai rezim irigasi. Penelitian dilakukan di lab. Lapang Departemen Teknik Sipil dan Lingkungan Institut Pertanian Bogor yang dilaksanakan pada awal Maret hingga September 2015. Jenis padi yang digunakan ialah varietas padi Ciherang yang sangat banyak ditanam di Jawa Barat.
TINJAUAN PUSTAKA
Budidaya SRI
SRI adalah teknik budidaya padi yang mampu meningkatkan produktivitas padi dengan cara mengubah pengelolaan tanaman, tanah, air dan unsur hara. Teknik ini terbukti telah berhasil meningkatkan produktivitas padi sebesar 50%, bahkan di beberapa tempat mencapai lebih dari 100% (Mutakin 2007). Kalsim et al (2007) menambahkan SRI adalah pengembangan praktek pengelolaan padi yang memperhatikan kondisi pertumbuhan tanaman yang lebih baik, terutama di zona perakaran.
Konsep dasar metode SRI meliputi kegiatan-kegiatan yang meliputi (Kalsim 2007):
1. Bibit muda.
Bibit padi ditanam setelah berumur 8-15 hari setelah semai, atau setelah memiliki dua daun.
2. Tanam 1 bibit per lubang
Bibit padi ditanam pada lahan dengan sistem tanam dangkal dan akar bibit membentuk huruf L.
3. Jarak tanam lebar
Dengan tanam tunggal pada jarak tanam yang lebar ini memberikan ruang lebih bagi perkembangan akar, serta persaingan dalam memperoleh sinar, udara dan nutrisi.
4. Sistem irigasi macak-macak
4
macak-macak memberikan hasil gabah yang tidak berbeda nyata dengan metode irigasi yang lain.
5. Penyiangan
Penyiangan pertama dilakukan setelah tanaman berumur 10 HST. Penyiangan berikutnya ditentukan oleh tingkat kerapatan gulma yang ada. Dalam satu musim tanam sebaiknya penyiangan dilakukan minimal 3 kali. Penyiangan ini bertujuan untuk memperbaiki struktur tanah dan meningkatkan aerasi tanah.
6. Aplikasi pupuk organik (khusus Jawa Barat)
Penggunaan kompos dianjurkan sebagai pengganti penggunaan pupuk kimia, dan terbukti memberikan hasil yang lebih bagus. Penambahan kompos ke dalam tanah akan menambah nutrisi pada tanah dan juga memberikan kontribusi dalam perbaikan struktur tanah.
Sistem Irigasi
Irigasi adalah suatu usaha manusia untuk memenuhi kebutuhan air yang tidak dapat dipenuhi oleh pasokan hujan untuk pertumbuhan tanaman yang optimum. Drainase adalah suatu usaha manusia untuk membuang kelebihan air yang merugikan tanaman. Peranan irigasi dalam meningkatkan dan menstabilkan produksi pertanian tidak hanya bersandar pada produktivitas saja tetapi juga pada kemampuannya untuk meningkatkan faktor-faktor pertumbuhan lainnya yang berhubungan dengan input produksi. Irigasi mengurangi risiko kegagalan panen karena ketidakpastian hujan dan kekeringan, membuat unsur hara yang tersedia menjadi lebih efektif, menciptakan kondisi kelembaban tanah optimum untuk pertumbuhan tanaman, serta hasil dan kualitas tanaman yang lebih baik.
Penggunaan sumberdaya air kini tengah berkembang dalam hal optimalisasi melalui metode intermittent irrigation yang dipadukan dengan berbagai teknologi intensifikasi budidaya pertanian, khususnya SRI. Pada prakteknya, SRI menggunakan irigasi intermittent dengan tidak menggenangi lahan secara terus menerus dalam waktu lama. Walaupun demikian kadar air tanah tetap dijaga sehingga pengaturan irigasi menjadi satu hal yang sangat penting dalam SRI (Arif et al 2009). Dalam intermittent irrigation ini, air diberikan dalam jumlah yang tepat sehingga memenuhi kebutuhan air tanaman dan memungkinkan daerah perakaran teraerasi. Keuntungan irigasi berkala adalah sebagai berikut: (a) menciptakan aerasi tanah, sehingga mencegah pembentukan racun dalam tanah, (b) menghemat air irigasi, (c) mengurangi masalah drainase, (d) mengurangi emisi gas metan.
Sistem Kendali Logika Fuzzy
5
Sistem kendali berbasis logika fuzzy memiliki konfigurasi yang terdiri dari 4 komponen utama, yaitu unit fuzzifikasi, inferensi, komposisi dan defuzzifikasi.
Fuzzifikasi merupakan definisi dari himpunan fuzzy dan penentuan derajat keanggotaan dari bagian input pada sebuah himpunan fuzzy. Adapun inferensi adalah proses evaluasi kaidah / aturan fuzzy untuk menghasilkan keluaran dari tiap aturan. Komposisi merupakan agregasi atau kombinasi dari keluaran semua aturan. Bagian akhir adalah defuzzifiksi merupakan perhitungan bagian keluaran dengan cara mengkonversi setiap hasil dari inference engine yang diekspresikan dalam bentuk himpunan fuzzy ke suatu bilangan real.
Terdapat beberapa metode untuk merepresentasikan hasil logika fuzzy yaitu metode Tsukamoto, Sugeno dan Mamdani. Pada metode Tsukamoto, setiap konsekuen direpresentasikan dengan himpunan fuzzy dengan fungsi keanggotaan monoton. Keluaran hasil inferensi masing-masing aturan adalah z, berupa himpunan biasa yang ditetapkan berdasarkan predikatnya. Hasil akhir diperoleh dengan menggunakan rata-rata terbobotnya (Kusumadewi 2002). Contoh dari fungsi keanggotaan himpunan fuzzy bisa dilihat pada Gambar 1.
Gambar 1 Himpunan keanggotaan logika fuzzy
Metode Sugeno mirip dengan metode Mamdani, hanya keluaran (konsekuen) tidak berupa himpunan fuzzy, melainkan berupa konstanta atau persamaan liniar. Ada dua model metode Sugeno yaitu model fuzzy sugeno orde nol dan model fuzzy sugeno orde satu. Bentuk umum model fuzzy sugeno orde nol adalah (Kusumadewi 2002):
Jika (x1 adalah A1 ) o (x2 adalah A2 ) o...o (xn adalah An ) maka z = k (1)
Bentuk umum model fuzzy Sugeno orde satu adalah :
Jika (x1 adalah A1) o (x2 adalah A2)o…o(xn adalah An) maka z = (p1.A1)+…(pn.An )+ q (2) Keterangan :
x1 = Himpunan keanggotaan ke n
A1 = Himpunan fuzzy ke-n sebagai anteseden k, q = konstanta tegas
z = keluaran
6
METODE PENELITIAN
Waktu dan Tempat Penelitian
Penelitian dilakukan di Cikarawang, Dramaga, Bogor untuk penanaman padi. Pengujian sampel tanah dilakukan di Laboratorium Mekanika Tanah Departemen Teknik Sipil dan Lingkungan. Penelitian dilakukan dari bulan Maret sampai bulan September 2015.
Alat dan Bahan
Pada penelitian ini ada beberapa alat yang digunakan yaitu laptop, pot, sensor E-Tape 30 cm, sensor curah hujan, sensor intensitas cahaya, sensor kelembaban tanah GS 3, sensor kecepatan angin, data logger decagon (Em50), field router, potensiometer, besi penyangga, kabel pelangi, kamera, ember ukuran 20 liter, real time clock, selang dengan berbagai diameter, klep, klem, pipa paralon, data logger (Em50), selenoid valve 12v, , kabel jumper, kabel jack, kabel jumper, relay modul 4 masukan, adaptor, baterai, microcontroller arduino uno, data logger shields deek-robort, microSD card 2 Gb, solder, gelas ukur, pompa akuarium HL-881, pipa akuarium, penggaris, dan meteran. Bahan yang digunakan adalah benih padi varietas Ciherang, pupuk organik (kompos), timah, selotip,dan tanah sawah yang siap ditanami. Software yang digunakan diantaranya Arduino IDE 1.6.6, MATLAB R2015a, ECH2O Utility dan Microsoft Excel. Gambar alat dapat dilihat pada Lampiran 2.
Prosedur Penelitian
Penelitian ini dilakukan dalam 3 tahap yaitu pengambilan data cuaca, perancangan sistem kendali dan aplikasi sistem kendali. Metode pengambilan data cuaca meliputi persiapan alat, kalibrasi sensor, pemasangan alat dan pengambilan data. Perancangan simulasi kendali meliputi penentuan masukan dan keluaran sistem, penentuan inferensi fuzzy, dan simulasi matematis sistem kendali. Aplikasi sistem kendali terdiri dari pembuatan program, perakitan alat kendali, uji coba alat. Diagram alir prosedur penelitian dapat dilihat pada Lampiran 1.
Pengambilan data cuaca
1.Kalibrasi sensor
7
didapatkan dengan regresi linear. Apabila nilai koefisien determinasi R2 adalah lebih dari 0.9 maka hasil kalibrasi benar.
2. Pemasangan alat
Sensor muka air tanah harus dilindungi dengan paralon yang dilubangi sebesar 3 mm di seluruh permukaan paralon agar air dapat masuk namun tanah atau partikel lainnya tidak mengganggu kerja sensor. Posisi sensor harus dalam kondisi horizontal. Kabel sensor ETape harus diberi pelindung agar tidak rusak. Penempatan setiap sensor diusahakan sedekat mungkin dengan data logger agar data lebih akurat.
3. Pengambilan data
Data diambil setiap hari dan diukur secara otomatis setiap 30 menit lalu direkam dalam decagon EM50. Ladang dibagi menjadi 3 petak perlakuan yaitu rezim tergenang, rezim basah dan rezim kering. Masing-masing memiliki nilai tinggi muka air yang diharapkan masing-masing sebesar 20mm, 0 mm dan 0 mm di atas permukaan tanah pada tahap 20 - 30 HST. Data yang diambil berupa kecepatan angin, curah hujan, radiasi, dan tinggi muka air.
Perancangan sistem kendali
1. Penentuan masukan dan keluaran sistem
Sistem kendali yang dirancang pada penelitian kali ini adalah sistem kendali yang berbasis fuzzy Sugeno. Persamaan ini juga dilengkapi dengan faktor - faktor alami seperti evapotranspirasi, transpirasi, infiltrasi, transpirasi dan perkolasi berdasarkan pendekatan-pendekatan aliran air dalam sistem tanaman – tanaman atmosfer seperti dapat ditemukan dalam Hillel (1980) serta Bear dan Verujit (1987).
Sumber: http://www.fao.org
Gambar 2 Skema Keseimbangan air di lahan
Persamaan keseimbangan air (water balance) pada lahan dapat dimodelkan dalam simulasi yang dibuat di Microsoft Excel Visual Basic. Program MATLAB digunakan untuk pengujian trial and error model keanggotaan fuzzy yang dibuat yang kriterianya adalah kehalusan hasil fuzzifikasi yang keluar. Input yang digunakan dalam sistem ini adalah kesalahan (error) dan perubahan kesalahan (delta error) dari variabel ketinggian yang diolah oleh sistem. Error adalah
Evapotranspirasi Irigasi dan Hujan
Limpasan
Perkolasi Kenaikan Kapilaritas
Titik Jenuh
Kapasitas Lapang
8
besarnya perbedaan nilai variabel yang diinginkan (nilai acuan) dengan kondisi yang terjadi dan nilainya bisa negatif maupun positif. Delta error adalah perubahan error yang terjadi selama kinerja sistem. Semakin besar delta error menunjukkan cepatnya perubahan error menuju nilai acuan. Model himpunan keanggotaan fuzzy dapat dilihat pada Gambar 3 dan 4. Keluaran sistem adalah lama bukaan valve irigasi dan drainase. Debit irigasi dibantu dengan pompa. Perhitungan debit pompa dilakukan dengan persamaan berikut:
E=WL- Sp (3)
Pada pengembangan simulasi ini persamaan (Gambar 2) yang digunakan adalah :
WLi =WL i- + Rf + I – ET – P – Ro –D *Δt (6) Keterangan :
I = Irigasi (mm/waktu)
D = Drainase (mm/waktu)
ET = Evapotranspirasi (mm/waktu) P = Perkolasi (mm/waktu)
Ro = Aliran permukaan (mm/waktu) Rf = Presipitasi (mm/waktu)
WLi = Tinggi muka air pada saat i (mm) WL(i-1) = Tinggi muka air sebelumnya (mm)
Δt = waktu
Nilai batas atas dan bawah dari himpunan anggota dari kedua masukan adalah [-2,2] , hal ini diperoleh dari sistem trial and error dan dengan tujuan agar sistem bekerja lebih teliti dan memperbaiki error sedikit demi sedikit.
2. Penentuan inferensi fuzzy
9
sebelumnya oleh Sofwan (2005) namun tidak spesifik untuk sistem pertanian tertentu maupun menggunakan sensor dan fuzzifikasi yang berbeda pula.
Gambar 3 Himpunan keanggotaan dari masukan error (cm)
Gambar 4 Himpunan keanggotaan dari masukan delta error (cm)
Komposisi aturan dibuat berdasarkan tujuan yang ingin dicapai yaitu waktu bukaan yang sesuai agar volume air yang masuk bisa diatur dan tinggi muka air berubah. Asumsi debit yang terjadi untuk irigasi dengan bantuan pompa akuarium HL-881 adalah 122.69 cm3/dt. Debit drainase jauh lebih kecil karena tanpa bantuan pompa yaitu 37.56 cm3/dt. Terdapat 15 aturan dalam sistem ini dan bisa dilihat pada Tabel 1.
Tabel 1 Matriks keputusan untuk keluaran berupa waktu bukaan valve
Error
Drainase Besar = Memiliki konstanta -15 detik Drainase Sedang = Memiliki konstanta -10 detik Drainase Kecil = Memiliki konstanta -5 detik
Rendah Agak Rendah Normal Agak Tinggi Tinggi
Negatif Normal Positif
10
Stop = Memiliki konstanta 0 detik
Irigasi Kecil = Memiliki konstanta 1 detik Irigasi Sedang = Memiliki konstanta 3 detik Irigasi Besar = Memiliki konstanta 5 detik
Hasil dari komposisi aturan adalah waktu bukaan valve dengan proses defuzzifikasi Sugeno. Proses defuzzifikasi dengan bantuan program MATLAB dapat dilihat pada Gambar 9.
3. Penentuan tinggi muka air acuan
Pengaturan pola penggenangan di lahan dilakukan berdasarkan grafik pengontrolan tinggi muka air pada Gambar 5, 6 dan 7. Setiap pola pengenangan dilakukan pada satu petakan, sehingga setiap petakan memiliki kondisi (rezim) yang berbeda.
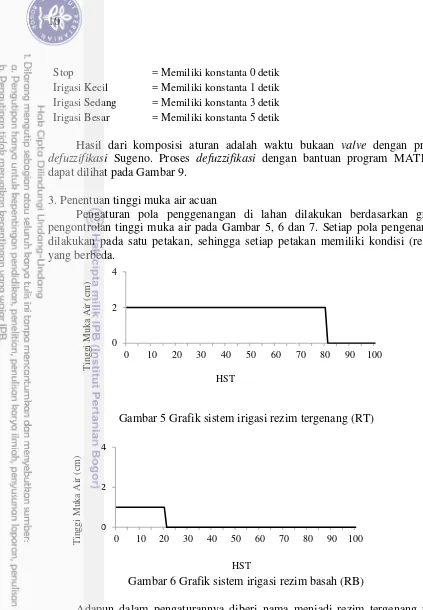
Gambar 5 Grafik sistem irigasi rezim tergenang (RT)
Gambar 6 Grafik sistem irigasi rezim basah (RB)
Adapun dalam pengaturannya diberi nama menjadi rezim tergenang pada budidaya padi konvensional, rezim basah dan rezim kering pada budidaya padi SRI. Pada rezim tergenang (Gambar 5) tinggi muka air dijaga pada ketinggian 2 cm selama 70 hari setelah tanam (HST), kemudian dilakukan penurunan tinggi muka air secara bertahap hingga masa panen (Sujono 2011). Ketinggian muka air pada rezim basah (Gambar 6) dijaga 1 cm selama 20 HST, kemudian diatur tinggi airnya sebesar 0 cm dari 20 HST hingga masa panen (Sujono 2011). Terakhir, pengaturan tinggi air pada rezim kering (Gambar 7) hampir sama dengan rezim basah, hanya saja pada 20 HST hingga 30 HST tinggi muka air dijaga 0 cm, kemudian dari 30
11
HST dilakukan penurunan tinggi muka air sebesar -5 cm dari permukaan tanah hingga masa panen berlangsung.
Gambar 7 Grafik sistem irigasi rezim kering (RK)
Aplikasi sistem kendali
1. Pembuatan program dan perakitan alat kendali
Hardware arduino diprogram menggunakan bahasa pemrograman wiring-based yang berbasiskan syntax dan library. Pemrograman wiring-based ini tidak berbeda dengan C/C++, tetapi dengan beberapa penyederhanaan dan modifikasi untuk memudahkan dalam pengembangan aplikasinya. Microcontroller arduino juga menggunakan Integerated Development Environment (IDE) berbasis processing (Banzi, 2009). Selenoid valve yang digunakan masing-masing 1 untuk irigasi dan drainase. Selenoid valve hanya bisa buka dan tutup tanpa bisa diatur debitnya. Rakitan alat bisa dilihat pada Lampiran 2.
2. Uji performa sistem kendali di laboratorium
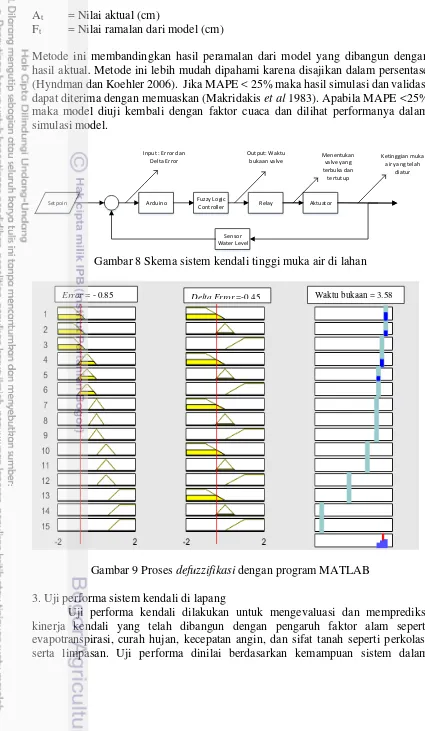
Uji peforma dilakukan unutk mengevaluasi sistem kendali fuzzy yang telah dibangun di perhitungan matematis dan pemodelan dengan bantuan perangkat lunak Ms.Excel dan MATLAB. Jika simulasi matematis telah dianggap baik berdasarkan error dan lag secara kuantitatif maka hasil matematis tersebut digunakan sebagai referensi simulasi aktual (Ibrahim 2015). Sistem membaca kondisi tinggi muka air dari pot lalu mempertimbangkan kondisi aktual secara fuzzy, selanjutnya memberikan keluaran berupa lama bukaan dan memberikan sinyal ke relay dan terakhir mengaktifkan aktuator yang akan dibuka. Sistem ini akan bekerja beruang–ulang (loop) sampai tinggi muka air tepat pada nilai acuan. Pengujian dilakukan dengan nilai acuan yang berbeda dan mengacu pada tinggi muka air acuan yang dirancang untuk dilakukan di lahan. Simulasi matematis dirancang dalam kondisi tanpa gangguan dan faktor cuaca. Simulasi menggunakan referensi tinggi muka air acuan. Skema kerja sistem kendali dapat dilihat pada Gambar 8. Simulasi matematis dilakukan di pot yang berisi tanah untuk melihat respons kendali secara langsung. Evaluasi dilakukan dengan metode MAPE (mean absolute precentage error).
12
At = Nilai aktual (cm)
Ft = Nilai ramalan dari model (cm)
Metode ini membandingkan hasil peramalan dari model yang dibangun dengan hasil aktual. Metode ini lebih mudah dipahami karena disajikan dalam persentase (Hyndman dan Koehler 2006). Jika MAPE < 25% maka hasil simulasi dan validasi dapat diterima dengan memuaskan (Makridakis et al 1983). Apabila MAPE <25% maka model diuji kembali dengan faktor cuaca dan dilihat performanya dalam simulasi model.
Setpoin Arduino Fuzzy Logic
Controller Relay
Sensor Water Level
Aktuator Input : Error dan
Delta Error
Output: Waktu bukaan valve
Menentukan valve yang terbuka dan
tertutup
Ketinggian muka air yang telah
diatur
Gambar 8 Skema sistem kendali tinggi muka air di lahan
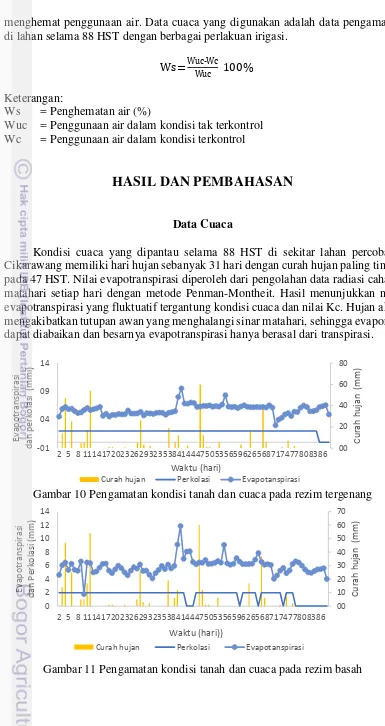
Gambar 9 Proses defuzzifikasi dengan program MATLAB 3. Uji performa sistem kendali di lapang
Uji performa kendali dilakukan untuk mengevaluasi dan memprediksi kinerja kendali yang telah dibangun dengan pengaruh faktor alam seperti evapotranspirasi, curah hujan, kecepatan angin, dan sifat tanah seperti perkolasi serta limpasan. Uji performa dinilai berdasarkan kemampuan sistem dalam
13
menghemat penggunaan air. Data cuaca yang digunakan adalah data pengamatan di lahan selama 88 HST dengan berbagai perlakuan irigasi.
Ws=Wuc-Wc
Wuc % (8)
Keterangan:
Ws = Penghematan air (%)
Wuc = Penggunaan air dalam kondisi tak terkontrol Wc = Penggunaan air dalam kondisi terkontrol
HASIL DAN PEMBAHASAN
Data Cuaca
Kondisi cuaca yang dipantau selama 88 HST di sekitar lahan percobaan Cikarawang memiliki hari hujan sebanyak 31 hari dengan curah hujan paling tinggi pada 47 HST. Nilai evapotranspirasi diperoleh dari pengolahan data radiasi cahaya matahari setiap hari dengan metode Penman-Montheit. Hasil menunjukkan nilai evapotranspirasi yang fluktuatif tergantung kondisi cuaca dan nilai Kc. Hujan akan mengakibatkan tutupan awan yang menghalangi sinar matahari, sehingga evaporasi dapat diabaikan dan besarnya evapotranspirasi hanya berasal dari transpirasi.
Gambar 10 Pengamatan kondisi tanah dan cuaca pada rezim tergenang
Gambar 11 Pengamatan kondisi tanah dan cuaca pada rezim basah
14
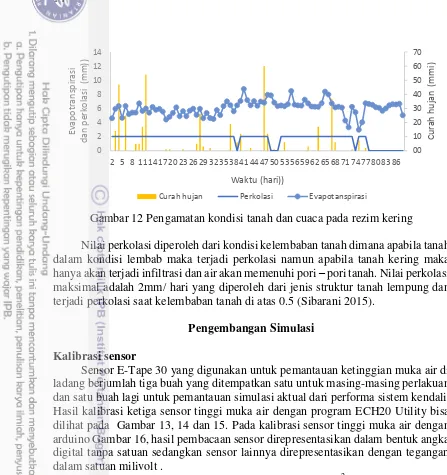
Gambar 12 Pengamatan kondisi tanah dan cuaca pada rezim kering
Nilai perkolasi diperoleh dari kondisi kelembaban tanah dimana apabila tanah dalam kondisi lembab maka terjadi perkolasi namun apabila tanah kering maka hanya akan terjadi infiltrasi dan air akan memenuhi pori – pori tanah. Nilai perkolasi maksimal adalah 2mm/ hari yang diperoleh dari jenis struktur tanah lempung dan terjadi perkolasi saat kelembaban tanah di atas 0.5 (Sibarani 2015).
Pengembangan Simulasi
Kalibrasi sensor
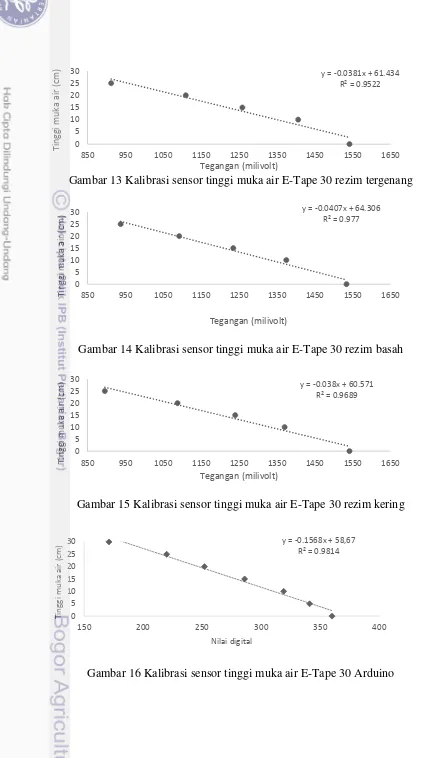
Sensor E-Tape 30 yang digunakan untuk pemantauan ketinggian muka air di ladang berjumlah tiga buah yang ditempatkan satu untuk masing-masing perlakuan dan satu buah lagi untuk pemantauan simulasi aktual dari performa sistem kendali. Hasil kalibrasi ketiga sensor tinggi muka air dengan program ECH20 Utility bisa dilihat pada Gambar 13, 14 dan 15. Pada kalibrasi sensor tinggi muka air dengan arduino Gambar 16, hasil pembacaan sensor direpresentasikan dalam bentuk angka digital tanpa satuan sedangkan sensor lainnya direpresentasikan dengan tegangan dalam satuan milivolt .
15
Gambar 13 Kalibrasi sensor tinggi muka air E-Tape 30 rezim tergenang
Gambar 14 Kalibrasi sensor tinggi muka air E-Tape 30 rezim basah
Gambar 15 Kalibrasi sensor tinggi muka air E-Tape 30 rezim kering
Gambar 16 Kalibrasi sensor tinggi muka air E-Tape 30 Arduino
y = -0.0381x + 61.434
850 950 1050 1150 1250 1350 1450 1550 1650
T
850 950 1050 1150 1250 1350 1450 1550 1650
T
850 950 1050 1150 1250 1350 1450 1550 1650
T
150 200 250 300 350 400
16
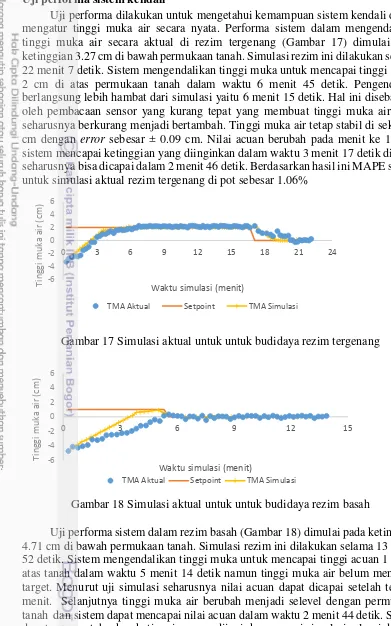
Uji performa sistem kendali
Uji performa dilakukan untuk mengetahui kemampuan sistem kendali dalam mengatur tinggi muka air secara nyata. Performa sistem dalam mengendalikan tinggi muka air secara aktual di rezim tergenang (Gambar 17) dimulai pada ketinggian 3.27 cm di bawah permukaan tanah. Simulasi rezim ini dilakukan selama 22 menit 7 detik. Sistem mengendalikan tinggi muka untuk mencapai tinggi acuan 2 cm di atas permukaan tanah dalam waktu 6 menit 45 detik. Pengendalian berlangsung lebih hambat dari simulasi yaitu 6 menit 15 detik. Hal ini disebabkan oleh pembacaan sensor yang kurang tepat yang membuat tinggi muka air yang seharusnya berkurang menjadi bertambah. Tinggi muka air tetap stabil di sekitar 2 cm dengan error sebesar ± 0.09 cm. Nilai acuan berubah pada menit ke 17 dan sistem mencapai ketinggian yang diinginkan dalam waktu 3 menit 17 detik dimana seharusnya bisa dicapai dalam 2 menit 46 detik. Berdasarkan hasil ini MAPE sistem untuk simulasi aktual rezim tergenang di pot sebesar 1.06%
Gambar 17 Simulasi aktual untuk untuk budidaya rezim tergenang
Gambar 18 Simulasi aktual untuk untuk budidaya rezim basah
Uji performa sistem dalam rezim basah (Gambar 18) dimulai pada ketinggian 4.71 cm di bawah permukaan tanah. Simulasi rezim ini dilakukan selama 13 menit 52 detik. Sistem mengendalikan tinggi muka untuk mencapai tinggi acuan 1 cm di atas tanah dalam waktu 5 menit 14 detik namun tinggi muka air belum mencapai target. Menurut uji simulasi seharusnya nilai acuan dapat dicapai setelah tepat 5 menit. Selanjutnya tinggi muka air berubah menjadi selevel dengan permukaan tanah dan sistem dapat mencapai nilai acuan dalam waktu 2 menit 44 detik. Sistem dapat mempertahankan ketinggian yang diinginkan sampai simulasi selesai dengan error sebesar ±0.04 cm. Berdasarkan hasil ini MAPE sistem untuk simulasi aktual
-6
TMA Aktual Setpoint TMA Simulasi
-6
17
rezim tergenang di pot sebesar 2.31%. Nilai MAPE besar karena tinggi muka air berada jauh dari nilai acuan di 5 menit pertama.
Gambar 19 Simulasi aktual untuk untuk budidaya rezim kering
Uji performa sistem dalam rezim kering (Gambar 19) dimulai pada ketinggian 4.86 cm di bawah permukaan tanah. Simulasi rezim ini dilakukan selama 19 menit 42 detik. Pada fase awal, sistem mengendalikan tinggi muka untuk mencapai tinggi acuan 1 cm di atas tanah namun secara aktual sistem tidak dapat mencapai tinggi mukai air yang diinginkan. Hal ini disebabkan oleh valve irigasi yang macet dan sensor tinggi muka air yang kurang tepat. Selanjutnya nilai acuan tinggi muka air berubah menjadi 0 cm dan secara aktual sistem dapat mencapai set poin dalam waktu 20 detik. Pada tahap berikutnya nilai acuan tinggi muka air berubah menjadi 5 cm di bawah permukaan tanah. Sistem dapat mencapai nilai acuan dalam waktu 17 menit 36 detik sejak simulasi berlangsung. Hal ini lebih lambat 4 menit dari prediksi yang dapat mencapai nilai acuan lebih dahulu.. Berdasarkan hasil ini MAPE sistem untuk simulasi aktual rezim tergenang di pot sebesar 5.91%. Nilai MAPE yang besar ini terjadi karena sistem banyak mengalami overshoot sejak menit ke 7 sampai akhir simulasi.
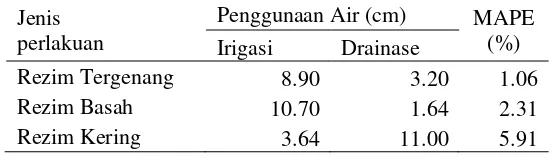
Ketiga nilai MAPE dari uji performa tiap rezim bernilai di bawah 25%. Hal ini menunjukkan bahwa performa sistem kendala dapat diterima dengan memuaskan. Selama simulasi aktual jumlah air yang digunakan (Tabel 2) lebih banyak pada irigasi untuk rezim tergenang dan basah, sedangkan pada nilai drainase lebih besar pada rezim kering. Sistem kendali yang memiliki uji performa yang bagus dapat digunakan untuk mengendalikan kondisi dengan faktor gangguan cuaca dan dievaluasi hasilnya.
Tabel 2 Penggunaan air simulasi aktual sistem
Jenis perlakuan
Penggunaan Air (cm) MAPE (%)
0,00 3,00 6,00 9,00 12,00 15,00 18,00 21,00
T
TMA Aktual Setpoint TMA Simulasi
18
Aplikasi Sistem Kendali
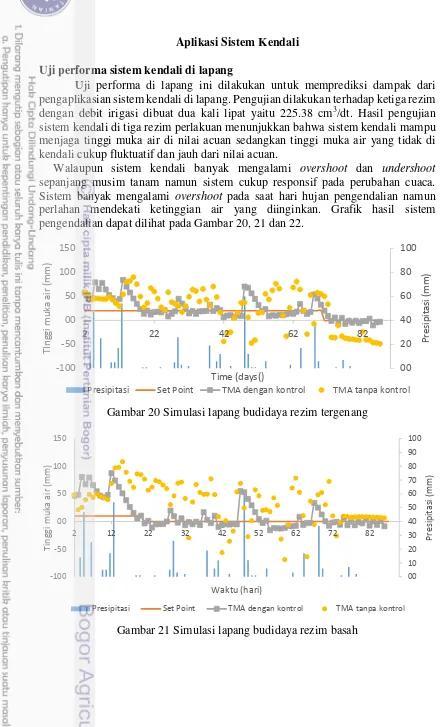
Uji performa sistem kendali di lapang
Uji performa di lapang ini dilakukan untuk memprediksi dampak dari pengaplikasian sistem kendali di lapang. Pengujian dilakukan terhadap ketiga rezim dengan debit irigasi dibuat dua kali lipat yaitu 225.38 cm3/dt. Hasil pengujian sistem kendali di tiga rezim perlakuan menunjukkan bahwa sistem kendali mampu menjaga tinggi muka air di nilai acuan sedangkan tinggi muka air yang tidak di kendali cukup fluktuatif dan jauh dari nilai acuan.
Walaupun sistem kendali banyak mengalami overshoot dan undershoot sepanjang musim tanam namun sistem cukup responsif pada perubahan cuaca. Sistem banyak mengalami overshoot pada saat hari hujan pengendalian namun perlahan mendekati ketinggian air yang diinginkan. Grafik hasil sistem pengendalian dapat dilihat pada Gambar 20, 21 dan 22.
Gambar 20 Simulasi lapang budidaya rezim tergenang
Gambar 21 Simulasi lapang budidaya rezim basah
00
Presipitasi Set Point TMA dengan kontrol TMA tanpa kontrol
00
19
Gambar 22 Simulasi lapang budidaya rezim kering
Penggunaan air akibat sistem kendali yang dikembangkan (Tabel 4) dapat berkurang dengan sangat signifikan dibandingkan dengan yang tidak dikendalikan (Tabel 3). Jumlah air yang terpakai irigasi dari lahan yang tidak dikendalikan di rezim tergenang mencapai 510.4 mm sedangkan dengan dikendalikan irigasi hanya mencapai 411.40 mm atau 4,114 m3/ha. Ini berarti sistem berhasil menghemat di bawah kebutuhan air pada pertanian rezim konvensional. Sistem pengendalian ini menghemat irigasi mencapai 19%.
Tabel 3 Keseimbangan air di masing- masing lahan tanpa sistem kendali
Sistem Irigasi Inflow (mm) Outflow (mm) Error
Hujan Irigasi ETc Drainase Perkolasi
Rezim Tergenang 398 510 504 253 166 15
Rezim Basah 398 447 519 214 140 27
Rezim Kering 398 435 526 226 142 62
Tabel 4 Keseimbangan air di masing- masing lahan dengan sistem kendali
Sistem Irigasi Inflow (mm) Outflow (mm) Error
Hujan Irigasi ETc Drainase Perkolasi
Rezim Tergenang 398 411 499 201 166 56
Rezim Basah 398 415 515 208 140 50
Rezim Kering 398 403 521 203 142 65
Jumlah air yang digunakan untuk drainase tanpa system kendali sebanyak 253.2 mm untuk rezim tergenang sedangkan dengan sistem kendali jumlah yang digunakan mencapai 200.59 mm. Penghematan air untuk drainase di rezim tergenang juga mencapai 21%. Penghematan irigasi dan drainase juga terjadi pada rezim lain dan bisa dilihat pada Tabel 5.
00
20
Tabel 5 Penghematan air yang terjadi dari kegunaan sistem kendali
Sistem Irigasi Penghematan (%) Irigasi Drainase
Rezim Tergenang 19 21
Rezim Basah 7 3
Rezim Kering 7 10
SIMPULAN DAN SARAN
Simpulan
1. Sistem kontrol fuzzy untuk irigasi dan drainase telah dirancang dan telah diuji pada skala laboratorium. Sistem kontrol dikembangkan berdasarkan metode defuzzifikasi Sugeno. Hasil uji skala laboratorium dengan perbedaan dalam budidaya dengan rezim tergenang, basah dan kering menghasilkan MAPE secara berurutan 1.06 %, 2.31 %, 5.91 % dan semua di bawah 25 % yang berarti sistem layak untuk uji lapangan.
2. Hasil tes di bidang sistem kontrol dalam bentuk simulasi telah dilakukan. Uji kinerja dilakukan sepanjang musim tanam 88 HST dalam berbagai rezim . Berdasarkan hasil yang diperoleh dapat diprediksi sistem kontrol fuzzy mampu meningkatkan penghematan air saat irigasi dan drainase sebanyak 3-21%.
Saran
Sistem kendali yang dikembangkan ini sebaiknya digunakan untuk penelitian lebih lanjut mengenai dampaknya pada produktivitas lahan padi dengan budidaya SRI dan pencapaian irigasi efektif.
DAFTAR PUSTAKA
Arif C, Saptomo SK, Setiawan BI, Iskandar MA. 2009. Simulasi Komputer Penerapan Teknik Kendali Fuzzy Sederhana untuk Pengaturan Muka Air Tanah di Lahan Padi SRI. Jurnal Irigasi, Vol. 4, No.2, Hal. 131-144.
Banzi Z. 2009. Arduino – Introduction [Terhubung Berkala] http:// arduino.cc/en/Guide/Introduction (20 Agustus 2015)
[BPS] Badan Pusat Statistik. 2014. Perkembangan penduduk Indonesia 20 tahun mendatang [Terhubung Berkala] http://www.bps.go.id. (15 Februari 2015) Bear J, Verrujit A. 1987. Modelling GroundwaterFlow and Pollution.
21
Birle S, Hussein, MA, dan Becker T. 2013. Fuzzy logic control and soft sensing applications in food and beverage processes. Food Control 29: 254-269
Carr MKV. 2012. Advance in Irrigation Agronomy Plantation Crops. New York (US) : Cambridge University Press.
Dachlan. 2009. Mengapa SRI [Terhubung berkala] http://www.citar.org. (13 Februari 2015)
Hillel D. 1980. Environmental Soil Physics. Amsterdam(NL): Academic Pr. Hyndman RJ, Koehler AB. 2006. Another Look at Measures of Forecast Accuracy.
International Journal of Forecasting.22(1):679-688
Ibrahim MNR. 2015. Desain Kontrol Otomatik Larutan Nutrisi Berbasis Electrical Conductivity untuk Budidaya Hidroponik Menggunakan Logika Fuzzy[Skripsi]. Bogor (ID): IPB Pr.
Iskandar MA., Susanti Y, S.K. Saptomo dan Setiawan BI. 1999. Pengendalian Muka Air Tanah menggunakan sistem Kendali Fuzzy Sederhana. Buletin Keteknikan Pertanian. 13(1):66-74.
Kalsim DK, Yushar, Subari, Marasi D, dan Hanhan A. 2007. Rancangan Operasional Irigasi untuk pengembangan SRI (Irrigation Operational Design for SRI Development), Paper disajikan dalam seminar KNI-ICID ,Bandung.
Kusumadewi S. 2002. Analisis dan Desain Sistem Fuzzy menggunakan Tool Box Matlab. Jakarta (ID): Graha Ilmu.
Kusumadewi S, Purnomo H. 2004.Aplikasi Logika Fuzzy untuk Pendukung Keputusan.
Yogyakarta (ID): Graha Ilmu.
Makridakis S, Wheelwright SC, McGee VE. 1983. Forecasting (Methods and Application). New York(US): J Wiley
Mutakin J. 2007. Budidaya dan keunggulan padi organik budidaya SRI. [Terhubung berkala] http://www.garutkab.go.id/downloadfiles/article/artikel %20S.R.I..pdf. (15 Februari 2015)
Purnama A. 2013. Kelebihan kendali fuzzy dari kendali PI pada motor induksi 3 phase [Terhubung Berkala] http://elektronika-dasar.web.id/teori- elektronika/kelebihan-kendali-fuzzy-dari-kendali-pi-pada-motor-induksi-3-phase/Dasar (7 September 2015)
Sibarani B. 2015. Pengembangan Sistem Monitoring Lingkungan Biofisik Padi Sawah dengan Berbagai Sistem Irigasi[Skripsi]. Bogor(ID): IPB Pr.
Sofwan. 2005. Penerapan fuzzy logic pada sistem pengaturan jumlah air berdasarkan suhu dan kelembaban. Jakarta(ID): SNATI.
Sujono J. 2011. Koefisien Tanaman Padi Sawah pada Sistem Irigasi Hemat Air. Agritech, 31(4), Jurusan Teknik Sipil dan Lingkungan, Fakultas Teknik. Yogyakarta (ID): Universitas Gajah Mada
Sen Z. 2010. Fuzzy Logic and Hydrological Modeling. New York(US):CRC Press.
Lampiran 2 Foto rangkaian alat
Rangkaian arduino dan relay
Lampiran 3 Bahasa pemrograman kendali di Arduino
//=========== mulai program ===============// void setup() {
Serial.begin (9600);
Serial.print ("| No |"); Serial.print ("| WL |"); Serial.print ("| Er |"); Serial.print ("| DEr |");
Serial.print ("| waktu bukaan(detik) |"); Serial.print ("| Status pengerjaan |"); Serial.print ("| waktu berlalu(detik) |"); Serial.println ("| kerja |");
Serial.println
("_________________________________________________");
pinMode(IrigasiPin, OUTPUT); pinMode(DrainasePin, OUTPUT); digitalWrite (IrigasiPin, HIGH); digitalWrite(DrainasePin, HIGH);
startSDCard(); }
void loop() {
File dataFile = SD.open(fileName, FILE_WRITE); /*===============Rezim tergenang============ for (i = 1 ; i <=100; i++){
if (i <=80) nilai acuan = 22; if (i>80) nilai acuan =20; */
/*=======nilai acuan untuk rezim basah ===== * for (i = 1 ; i <=100; i++){ fuzzifikasi (); // fuzzifikasi
aturanbase (); //mentukan daerah implikasi
Lampiran 3 Lanjutan
kendali (); // mengatur kerja valve
Pengkondisian ();//mengembalikan kondisi valve jeda = 1800 + (abs(waktu)*1000) +10000; menit = ((menit *1000) + jeda)/1000 ; Serial.print (" / ");
Serial.print (waterLevel); Serial.print (" / ");
Lampiran 3 Lanjutan
Lampiran 4 Persamaan dari fungsi keanggotaan input dan output
Input 2 Delta Error (DE)
Lampiran 5 Contoh perhitungan manual sistem Diketahui:
Error 1 = 0,7
Water level =20,3 cm Nilai acuan = 20 cm
Penentuan membership masing-masing input Nilai membership input 1 Error (E) -Fuzzifikasi
Rendah � � = 0
Nilai membership input 2 Delta Error (DE)
Negatif � �= + − . = .
Normal � � =− . + .
. = .
Positif � � =
Maka input error termasuk dalam kategori “Normal” dan “Agak
tinggi” dan input delta error masuk dalam kategori “Negatif” dan
“Normal”
Defuzzifikasi Aturan sistem
Dengan mempertimbangkan kondisi input dan membandingkan dengan aturan dalam sistem maka diperoleh 4 aturan yang
Besar Irigasi Kecil Stop
Drainase Kecil
Drainase Besar
Positif Irigasi
Sedang Irigasi Kecil Stop
Drainase Sedang
Lampiran 5 Lanjutan
1. Jika error tinggi adalah “Normal” dan delta error adalah
“Negatif” maka a1 = Min (0.25 dan 0.6) dan output drainase adalah stop (z1=0)
2. Jika error tinggi adalah “Normal” dan delta error adalah
“Positif” maka a2 = Min (0.25 dan 0.2) dan output drainase adalah
stop (z1=0)
3. Jika error tinggi adalah “Agak Tinggi” dan delta error adalah
“Negatif” maka a1 = Min (0.6 dan 0.6) dan output drainase adalah
drainase kecil (z1= 5 detik)
4. Jika error tinggi adalah “Agak Tinggi” dan delta error adalah
“Positif” maka a2 = Min (0.25 dan 0.2) dan output drainase adalah
stop (z1= 5 detik) Perhitungan output
Output = � � � + � � � + � � � + � � �
= . � + . � + . � + . � = + = � drainase kecil.
Hasil akhir aplikasi
Water Level akhir = Water level + (Drainase x output)
= 20.3 + (-0.0417 cm/detik x 4 detik) = 20.2583 cm
RIWAYAT HIDUP
Penulis dilahirkan di Jakarta pada tanggal 26 April 1993 dari Pasangan Bapak Paingot Sidauruk dan Ibu Rosti Sibarani. Penulis adalah putra kedua dari tiga bersaudara. Tahun 2011 penulis lulus dari SMA Negeri 33 Jakarta dan pada tahun yang sama lulus seleksi masuk ke Institut Pertanian Bogor melalui jalur UTM IPB dan diterima di Departemen Teknik Sipil dan Lingkungan, Fakultas Teknologi Pertanian.
Selama mengikuti perkuliahan, penulis menjadi asisten praktikum Fisika TPB pada tahun ajaran 2012-2013, 2014-2015, asisten praktikum Teknik Kontrol Lingkungan pada tahun 2014-2014-2015, dan asisten responsi agama Kristen Protestan tahun ajaran 2012-2013. Penulis juga aktif mengajar di responsi persekutuan mahasiswa Kristen untuk mata kuliah Fisika, Kalkulus dan Landasan Matematika. Penulis juga aktif berorganisasi dalam UKM PMK IPB Komisi Pelayanan Khusus sebagai wakil koordinator bidang pembinaan dan aktif sebagai staf DPM Fateta 2014 Kabinet Kapas Merah. Bulan Juni – Agustus 2014 penulis melaksanakan praktik lapangan di PT Hindoli (a Cargill Company) Sumatra Selatan dengan judul Aspek Keteknikan Pengelolaan Lingkungan Hidup oleh PT Hindoli (A Cargill Company), Desa Teluk Kemang, Sungai Lilin, Kabupaten Musi Banyuasin, Sumatra Selatan.