TUGAS AKHIR
STUDI PEMAKAIAN KAPASITOR UNTUK MENJALANKAN MOTOR INDUKSI TIGA FASA PADA SISTEM SATU FASA
(Aplikasi Pada Laboratorium Konversi Energi Listrik FT-USU) Diajukan untuk memenuhi salah satu syarat dalam
menyelesaikan Pendidikan Sarjana (S-1) pada
Departemen Teknik Elektro Fakultas Teknik Universitas Sumatera Utara
oleh
RUMONDA SITEPU
NIM: 070402069
DEPARTEMEN TEKNIK ELEKTRO
FAKULTAS TEKNIK
UNIVERSITAS SUMATERA UTARA
MEDAN
ABSTRAK
KATA PENGANTAR
Penulis bersyukur kepada Tuhan Yang Maha Kuasa atas segala berkat dan
anugerahNya penulis dapat menyelesaikan tugas akhir yang berjudul :
“STUDI PEMAKAIAN KAPASITOR UNTUK MENJALANKAN MOTOR INDUKSI TIGA FASA PADA SISTEM SATU FASA”
(Aplikasi pada Lab.Konversi Energi Listrik Fakultas Teknik USU)
Penulisan Tugas Akhir ini merupakan salah satu persyaratan yang wajib dipenuhi sebagai salah satu syarat untuk memperoleh gelar sarjana teknik pada
departemen Teknik Elektro FT USU.
Tugas Akhir ini penulis persembahankan untuk kedua orangtua yang telah membesarkan penulis dengan kasih sayang yang tak terhingga yaitu Asli Sitepu
dan Sari Muspita Br Sembiring serta nenek penulis Pirma Br Sebayang yang telah memberikan segala kasih sayang ,perhatian dan segalanya serta kakak penulis
,Asmita Br Sitepu dan adik penulis Benni Sitepu.
Penulis menyadari bahwa tulisan ini tidak akan selsai tanpa adanya bantuan dan dukungan dari berbagai pihak.
Pada kesempatan ini saya ingin menyampaikan ucapan terima kasih yang tulus dan sebesar-besarnya kepada :
1. Bapak Ir.Eddy Warman, sebagai Dosen Pembimbing tugas akhir saya yang sangat besar bantuannya bagi saya dalam menyelasaikan tugas akhir ini.
2. Bapak Ir.Arman Sani,MT selaku dosen wali penulis yang banyak memberikan masukan dan pengarahan selama penulis menempuh
3. Bapak Ir. Surya Tarmizi Kasim, selaku Ketua Departemen Teknik Elektro.
4. Bapak Ir.Samsul,MT selaku kepala Laboratorium Konversi Energi Listirk 5. Bapak Ir.Syarawardi, selaku kepala Laboratorium Teknik Tegangan
Tinggi dan juga kepada bapak Ir.Bonggas L Tobing dan Ir.Hendra Zulkarnaen ,selaku staf pengajar di laboratorium yang bersangkutan. .
6. Bang Roy, sebagai staff administrasi Laboratorium Konversi Energi Listrik, Bang Iqbal ,Bang Azhari ,Ferry,Fahmi,Fadi ,Samsyarif yang sudah menyediakan waktu dan pikiranya, dan semua staff asisten di
Laboratorium Konversi Energi Listrik.
7. Terkhusus untuk Bang Herman atas waktunya selama ini yang telah
menolong penulis selama penulisan tugas akhir ini..
8. Buat Teman –Teman Asisiten Laboratorium teknik Tegngan Tinggi ,yaitu;Bang Angga Yoakim,Setia,Angel,Harmoko Eykel dan Wilvian..
9. Buat teman –teman stambuk 2007 , Yoakim, Setia , Mario(Makcoy), cimet(mahasiswa terbaik), Kaban, Andrew, Janes, Rocky,Benito,
Harapan,Jhon TBS, Om Advent,duo rambo(ramli dan ramces) ,Bule Irham,Yuyanto,ST,Jony Huang,ST, Denny Tanaya,ST,Leo jahat dan baik,Hotbe bersaudara ,Ketua Ajir,Rebud,Habibi,Seruhendra,Bincar
,Nobel ,Haogoaro dan lainnya .
10.Semua orang yang tidak dapat penulis sebutkan satu persatu yang telah
acuan untuk menempuh hari-hari ke depan dengan penuh semangat dan
lebih baik lagi .
Penulis menyadari bahwa Tugas Akhir ini masih jauh dari sempurna .Oleh
karena itu penulis sangat mengharapkan saran dan kritik yang membangun demi penyempurnaan Tugas Akhir ini.Akhirnya penulis berharap Tugas Akhir ini dapat bermanfaat bagi para pembaca ,khusunya mahasiswa yang ingin lebih mengetahui
dan mendalami Tugas Akhir Penulis.
Medan, 6 Juli 2011
DAFTAR ISI
ABSTRAK ……….. i
KATA PENGANTAR ……… ii
DAFTAR ISI ………... v
DAFTAR GAMBAR ...viii
DAFTAR TABEL ... xi
BAB I PENDAHULUAN 1.1Latar Belakang ... 1
1.2Tujuan Penulisan ... 3
1.3Manfaat Penulisan ... 3
1.4Batasan Masalah ... 4
1.5Metode Penulisan ... 5
1.6Sistematika Penulisan ... 5
BAB II MOTOR INDUKSI TIGA FASA 2.1 Umum ... 6
2.2 Konstruski Motor Induksi Tiga Fasa ... 6
2.3 Prinsip Medan Putar ... 7
2.4 Prinsip Kerja Motor Induksi Tiga Fasa ... 11
2.5 Frekuensi Rotot...15
BAB III KINERJA MOTOR INDUKSI TIGA FASA YANG DISUPLAI SUMBER SATU FASA
3.1 Parameter Motor Induksi Tiga Fasa...17
3.1.1 Percobaan DC...17 3.1.2 Percobaan Beban Nol...20
3.1.3 Percobaan Rotor Tertahan...23
3.2 Menjalankan Motor Induksi Tiga Fasa Pada Sistem Satu Fasa...24
3.2.1 Umum...24 3.2.2. Menjalankan Motor Induksi Tiga Fasa Pada Sistem Satu Fasa
Dengan Metode Steinmetz...27 3.2.2.1. Analisa rangkaian Motor Induksi Tiga Fasa yang Disuplai satu fasa...29
3.2.3. Menjalankan Motor Induksi Tiga Fasa Pada Sistem Satu Fasa Dengan Metode Semihex ...32
3.2.4 Rangkaian Urutan Nol,Positif dan Negatif Motor Induksi...39
3.3 Aliran Daya dan Efisiensi Pada Motor Induksi Yang Disuplay
Satu Fasa...48 3.3.1 Aliran Daya...48
BAB IV PERHITUNGAN PARAMETER DAN ANALISA KINERJA MOTOR INDUKSI TIGA PHASA YANG DISUPLAI
SUMBER SATU PHASA
4.1 Umum ……….. 55
4.2 Peralatan yang Digunakan ……… 56
4.3 Percobaan Untuk Mendapatkan Parameter – Parameter Motor Induksi Tiga Fasa………...57
4.3.1 Percobaan Tahanan DC Pada Belitan Stator...… ...57
4.3.1.1 Rangkaian Percobaan……… 58
4.3.1.2 Prosedur Percobaan ……….. 58
4.3.1.3 Data Hasil Percobaan……… 58
4.3.2 Percobaan Hubung Singkat (Blocked Rotor Test)...59
4.3.2.1 Rangkaian Percobaan……… 59
4.3.2.2 Prosedur Percobaan ……….. 60
4.3.2.3 Data Hasil Percobaan……… 60
4.4. Percobaan Beban Nol ………... ...61
4.4.1.1 Rangkaian Percobaan ………... 61
4.4.1.2 Prosedur Percobaan ………. 62
4.4.1.3 Data Hasil Percobaan ………... 62
4.4. Rangkaian Ekivalen Motor Induksi...63 4.5 Percobaan Pengoperasian Motor Induksi Tiga Phasa yang
4.5.1 Rangkaian Percobaan ………...66
4.5.2 Prosedur Percobaan ……….. 67
4.5.3 Data Hasil Percobaan ……… 67
4.6 Analisis...67
4.6.1 Analisa Data dengan menggunakan metode Steinmetz..67
4.6.2 Analisa Data dengan menggunakan metode SemiHex....77
BAB V PENUTUP
V.1 Kesimpulan………..…...95V.2 Saran ………. 96
ABSTRAK
BAB 1 PENDAHULUAN
1.1 Latar Belakang
Motor induksi merupakan jenis motor yang paling banyak digunakan pada pedesaan.Harganya yang murah menjadikan motor induksi lebih sering dipakai
untuk memudahkan kegiatan pertanian di pedesaan.Seiring bertambahnya perluasan daerah pertanian mengakibatkan kapasitas motor induksi yang
dibutuhkan .akan semakain besar pula.
Di daerah pedesaan yang kebanyakan menggunakan sistem listrik satu fasa ,motor induksi yang digunakan adalah motor satu fasa yang diguanakan untuk
pertanian maupun industri kecil.Seiring bertambahnya beban ,maka diperluakan motor induksi satu fasa yang berdaya besar. Pemakaian motor induksi satu fasa
dengan daya yang besar memerlukan rangkaian kendali yang khusus dengan biaya yang besar sehingga digunakan motor induksi tiga fasa yang dioperasikan pada sistem satu fasa untuk mendapatkan daya yang besar.
Langkah-langkah pengoperasian motor induksi tiga fasa pada sistem tenaga listrik satu fasa dengan menggunakan kapasitor telah berkembang dengan
baik. Metode ini digunakan karena mempunyai respon kecepatan yang cepat pada motor, arus start yang kecil dan perbaikan faktor daya hingga mendekati satu. Karakteristik motor saat beroperasi tergantung dari letak dan nilai kapasitor jalan
yang digunakan pada motor.
Pengoperasian motor induksi tiga fasa pada sistem satu fasa dapat
kumparan bantu dan kumparan utama dengan kapasitor yang dipasanng permanen
pada terminal motor induksi.Selanjutnya motor induksi tiga fasa ini akan bekerja seperti motor induksi dua fasa simetris atau motor kapasitor karena keduanya
mempunyai prinsip kerja yang sama
Seiring berkembangnya zaman maka metode menjalankan mtor induksi tiga fasa pada sisitem satu fasa terus bertmabah.Diantara dari metode tersebut
dinamakan metode steinmetz dan semihex..Oleh karena itu perlu dilakukan analisa kinerja pengoperasian motor induksi tiga fasa pada sistem satu fasa
dengan mengguanakan kapasitor dengan kedua metode tersebut dan membandingkannya untuk mendapat kinerja yang lebih baik.
1.2 Tujuan dan Manfaat Penulisan
Adapun tujuan penulisan tugas akhir ini adalah
1. Untuk mengetahui kinerja pengoperasian Motor induksi tiga fasa pada sistem satu fasa dengan menggunakan kapasitor dengan berbagai penempatan kapasitor dengan menggunakan metode steinmetz dan
semihex
2. Membandingkan kinerja menjalankan motor induksi tiga fasa pada sistem
satu fasa dengan kedua metode dengan kondisi sewaktu operasi tiga fasa. 3. Mengetahui nilai minumum kapasitor yang terpasang agar motor dapat
berputar pada sumber satu fasa.
Manfaat penelitian ini adalah mengetahui kinerja pengoperasian Motor induksi tiga fasa pada sistem satu fasa dengan menggunakan kapasitror dan memberikan
1.3 Batasan Masalah
Agar tujuan penulisan tugas akhir ini sesuai dengan yang diharapkan serta terfokus pada judul dan bidang yang telah disebutkan di atas, maka penulis
membatasi permasalahan yang akan dibahas sebagai berikut :
1. Motor yang digunakan adalah motor induksi tiga fasa jenis rotor sangkar.
2. Tidak membahas gangguan yang terjadi pada motor induksi tiga fasa. 3. Menjalankan motor induksi dengan menggunakan metode steinmetz
dan metode semihex
4. Tidak membahas mengenai harmonisa pada motor induksi 5. Hanya membahas motor dalam keadaan berbeban
6. Tidak membahas tentang sistem yang memproteksi mesin
7. Tidak membahas cara mencari nilai kapasitor agar tegangan seimbang
I.4 Metode Penulisan
Untuk dapat menyelesaikan tugas akhir ini maka penulis menerapkan
beberapa metode studi diantaranya :
1. Studi literatur yaitu dengan membaca teori-teori yang berkaitan
dengan topik tugas akhir ini dari buku-buku referensi baik yang dimiliki oleh penulis atau di perpustakaan dan juga dari artikel-artikel, jurnal, internet dan lain-lain
3. Studi analisa yaitu berupa penganalisaan terhadap data – data yang
diperoleh.
4. Diskusi yaitu berupa konsultasi tentang topik tugas akhir ini
dengan dosen pembimbing, dosen – dosen bidang konversi energi elektrik, asisten laboratorium konversi energi elektrik dan teman – teman sesama mahasiswa Departemen Teknik Elektero FT-USU.
I.5 Sistematika Penulisan
Tugas akhir ini disusun berdasarkan sistematika penulisan sebagai berikut. BAB I PENDAHULUAN
Bab ini merupakan pendahuluan yang berisi tentang latar belakang masalah, tujuan dan manfaat penulisan, batasan masalah, metode dan sistematika penulisan.
BAB II MOTOR INDUKSI TIGA FASA
Bab ini membahas tentang motor induksi tiga phasa, konstruksi, jenis motor induksi tiga phasa, medan putar, slip, prinsip kerja dan frekuensi motor induksi.
BAB 3 KINERJA MOTOR INDUKSI TIGA FASA YANG DISUPLAI SUMBER SATU FASA
Pada bab ini menjelaskan bagaimana persamaan untuk dapat menghitung parameter – parameter motor induksi tiga fasa, dan persamaan – persamaan motor induksi tiga fasa menjadi motor induksi satu fasa..
BAB IV ANALISA KINERJA PENGOPERASIAN MOTOR INDUKSI TIGA YANG DISUPLAI SATU FASA DENGAN MENGGUNAKAN KAPASITOR
fasa pada sistem satu fasa dengan menggunakan kapasitor.
BAB V KESIMPULAN DAN SARAN
BAB II
MOTOR INDUKSI TIGA FASA
2.1 Umum
Karena kesederhanaanya ,kontruksi yang kuat dan karakteristik kerjanya yang baik ,motor induksi merupakan motor ac yang paling banyak digunakan
.Penamaannya berasal dari kenyataan bahwa arus rotor motor ini bukan diperoleh dari sumber tertentu, tetapi merupakan arus yang terinduksi sebagai akibat adanya
perbedaan relatif antara putaran rotor dengan medan putar (rotating magnetic field) yang dihasilkan arus stator.
Motor ini memiliki konstruksi yang kuat, sederhana, handal, serta berbiaya
murah. Di samping itu motor ini juga memiliki effisiensi yang tinggi saat berbeban penuh dan tidak membutuhkan perawatan yang banyak. Akan tetapi
jika, motor induksi masih memiliki kelemahan dalam hal pengaturan kecepatan. Dimana pada motor induksi pengaturan kecepatan sangat sukar untuk dilakukan.
2.2 Kontruksi Motor Induksi
Motor induksi terdiri dari tiga bagian penusun utama yaitu stator,rotor dan celah udara.Pada inti stator terbuat dari lapisan –lapisan baja beralur yang
didukung dalam rangka stator yang terbuat dari besi tuang atau plat baja yang
dipabrikasi.Belitan-belitan nya sma seperti generator sinkron ,diletakkan dalam alur 1200 yang tersambung wye maupun delta.
rotor secara alami akan mengalir melalui tahanan yang paling kecil yaitu
konduktor rotor.pada setiap ujung rotor ,konduktor rotor semuanya
dihubungsingkatkan dengan cincin ujung .Konduktor rotor dan cincin ujung
serupa dengan sangkar tupi sehingga dinamakan demikian,
Batang rotor dan cincin ujung rotor motor induksi rotor sangkar yang lebih kecil adalah coran tembaga dan alumunium dalam satu lempeng pada inti
rotor.Dalam motor yang lebih besar ,batang rotortidak dicor melainkan dibenamkan ke dalam alur rotor dan kemudian dilas dengan kuat ke cincin
ujung.batang rotor tidak selalu ditempatkan paralel terhadap poros motor tetapi kerap kali dimiringkan .Hal ini menghasilkan torsi yang lebih seragam dan juga mengurangi derau dengung magnetik sewaktu motor berjalan.
Motor rotor belitan berbeda dengan sangkar tupai dalam hal kontruksi rotornya.Seperti namanya ,rotor dililit dengan lilitan terisolasi serupa lilitan
stator.Lilitan fasa rotor dihubungkan secara wye dan masing-masing fasa ujung terbuka dikeluarkan ke cincin slip yang terpasang pada poros rotor .lilitan rotor tidak dihubungkan ke pencatu .Cincin slip dan sikat semat-mata merupakan
penghubung tahanan kendali variabel luar ke dalam rangkain rotor..
2.3 Prinsip Medan Putar
Ketika kita menghubungkan sumber tiga fasa ke terminal tiga fasa motor induksi, maka arus bolak-balik sinusoidal IR, IS, IT akan mengalir pada belitan
stator. Arus-arus tersebut akan menimbulkan ggm (gaya gerak magnet) yang mana, pada kumparan, akan menimbulkan fluks magnetik yang berputar sehingga
tidak diam pada posisi tertentu, tetapi meneruskan pergeseran posisinya disekitar
stator.
Untuk melihat bagaimana medan putar dibangkitkan, maka dapat diambil
contoh pada motor induksi tiga fasa dengan jumlah kutub dua. Fluks yang dihasilkan oleh arus-arus bolak-balik pada belitan stator adalah :
ΦR = Φm sin ωt ………(2.1a)
ΦS = Φm sin (ωt – 120o) ………. (2.1b)
ΦT = Φm sin (ωt – 240o) ………. (2.1c)
Gambar 2.1. Medan Putar Pada Motor Induksi Tiga Fasa (Menggambarkan keadaan pada gambar 2.8)
(a). Pada keadaan 1 (gambar 2.6 dan 2.8), ωt = 0 ; arus dalam fasa R bernilai nol sedangkan besarnya arus pada fasa S dan fasa T memiliki nilai yang
mengalir ke luar dari konduktor sebelah atas dan memasuki konduktor
sebelah bawah. Sementara resultan fluks yang dihasilkan memiliki besar yang konstan yaitu sebesar 1,5 Φm dan dibuktikan sebagai berikut :
ΦR = 0 ; ΦS = Φm sin ( -120o ) = 2
3
− Φm ;
ΦT = Φm sin ( -240o ) = 2
3
Φm
Oleh karena itu resultan fluks, Φr adalah jumlah fasor dari ΦT dan – ΦS
Sehinngga resultan fluks, Φr = 2 x 2
3
Φm cos 30o= 1,5 Φm
(b). Pada keadaan 2, arus bernilai maksimum negatif pada fasa S, sedangkan pada R dan fasa T bernilai 0,5 maksimum pada fasa R dan fasa T, dan pada saat ini ωt = 30o
, oleh karena itu fluks yang diberikan oleh masing-masing fasa :
ΦR = Φm sin ( -120o) = 0,5 Φm
ΦS= Φm sin ( -90o ) = - Φm
ΦT= Φm sin (-210o) = 0,5 Φm
Maka jumlah fasor ΦR dan ΦT adalah = Φr’ = 2 x 0,5 Φmcos 60 = 0,5 Φm.
Sehingga resultan fluks Φr = -ΦS + Φr’ = 0,5 Φm+ Φm= 1,5 Φm.
Dari gambar diagram fasor tersebut dapat dilihat bahwa resultan fluks
berpindah sejauh 30o dari posisi pertama.
(c). Pada keadaan ini ωt = 60o, arus pada fasa R dan fasa T memiliki besar yang sama dan arahnya berlawanan ( 0,866 Φm ), oleh karena itu fluks yang
ΦR = Φm sin ( 60o ) = 2
3
Φm
ΦS= Φm sin ( -60o ) = 2
3
− Φm
ΦT= Φm sin ( -180o ) = 0
Maka magnitud dari fluks resultan : Φr = 2 x 2
3
Φm cos 30o= 1,5 Φm
Dari gambar diagram fasor tersebut dapat dilihat bahwa resultan fluks berpindah sejauh 60o dari posisi pertama.
(d). Pada keadaan ini ωt = 90o, arus pada fasa R maksimum ( positif), dan arus pada fasa S dan fasa T = 0,5 Φm , oleh karena itu fluks yang diberikan oleh
masing – masing fasa
ΦR = Φm sin ( 90o) = Φm
ΦS= Φm sin ( -30o ) = - 0,5 Φm
ΦT= Φm sin (-150o) = - 0,5 Φm
Maka jumlah fasor - ΦT dan – ΦSadalah = Φr’ = 2 x 0,5 Φm cos 60 = 0,5
Φm. Sehingga resultan fluks Φr = Φr’ + ΦT= 0,5 Φm+ Φm= 1,5 Φm.
2.4 Prinsip Kerja
Adapun prinsip kerja motor induksi mengikuti langkah-langkah sebagai berikut;
1. Ketika tgangan AC dihubungkan pada kumparan stator ,mka akan timbul medan putar dengan kecepatan:
NS = ...(2.2)
2. Medan putar stator tersebut akan memotong batang konduktor pada rotor.
3. Sehingga pada kumparan rotor akan akan menimbulkan tegangan induksi sebesar:
Er = 4,44f2N2φm...(2.3)
4. Karena rangkaian rotor tertutup maka ggl induksi tersebut akan
menghasilkan arus
5. Adanya arus di dalam medan magnet akan menimbulkan gaya pada rotor.
6. Bila torsi mula yang dihasilkan oleh gaya tersebut pada rotor cukup besar untuk memikul kopel beban ,rotor akan berputar searah dengan medan putar stator.
7. Dari pernyataan 2 dan 3 terlihat bahwa syarat terbentuknya tegangan induksi haruslah ada perbedaan kecepatan relatif (slip) antara kecepatan
medan putar stator(Ns) dan keceptan putar rotor(Nr) yang dapat dituliskan sebagai berikut;
) 4 . 2 ( ... ... ... %... 100
s r s − × =
8. Bila ns = nr, tegangan tidak akan terinduksi dan arus tidak akan mengalir
pada kumparan rotor, karenanya tidak dihasilkan kopel. Kopel ditimbulkan jika nr < ns
2.5 Frekuensi Rotor
Sewaktu rotor belum berputar, maka frekuensi arus pada rotor akan sama seperti frekuensi masukan ( sumber ). Namun,sewaktu rotor akan berputar, maka
frekuensi rotor akan bergantung kepada kecepatan relatif atau bergantung
terhadap besarnya slip. Untuk nilai slip tertentu, maka frekuensi rotor sebesar f '
yaitu,
r s n
n − =
P f ' 120
, diketahui bahwa ns= p
f 120
Dengan membagikan frekuensi rotor setelah berputar dengan frekuensi sebelum berputar , maka akan didapatkan nilai sebagai berikut
s n
n n f f
s r s − = =
'
Sehingga '
f = sf ( Hz )……….(2.5)
Telah diketahui bahwa arus rotor bergantung terhadap frekuensi rotor ' f =
memberikan reaksi medan magnet. Biasanya medan magnet pada rotor akan
menghasilkan medan magnet yang berputar yang besarnya bergantung atau relatif
terhadap putaran rotor sebesarsn . s
Pada keadaan tertentu, arus rotor dan arus stator menghasilkan distribusi medan magnet yang sinusoidal dimana medan magnet ini memiliki magnetudo yang
konstan dan kecepatan medan putar n yang konstan. Kedua Hal ini merupakan s
medan magnetik yang berputar secara sinkron. kenyataannya tidak seperti ini
karena pada stator akan ada arus magnetisasi pada kumparannya
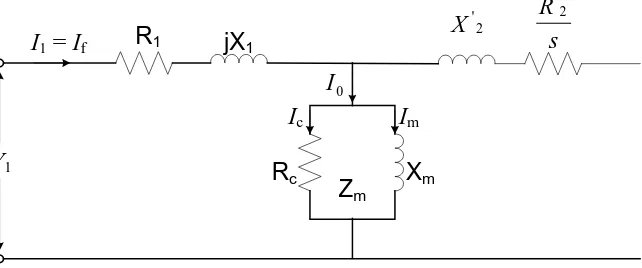
2.6 Rangkaian Ekivalen Lengkap
Pada prinsipnya induksi yang terjadi pada motor induksi hampir sama
dengan transformator yang berbeban resisitif sehingga penggambaran rangkaian ekivalen motor induksi berdasarkan rangkaian ekivalen transformator diman stator
identik dengan sisi primer trasformator dan rotor identik dengan sisi sekunder transformator.perbedaannya yang mendasr antara keduanya adalah transformator merupakan mesin listrik statis sedangkan motor listik merupkan mesin dinamis
1
V Rc
E
11
I
m
I
+
-c
I
E
22
jX
'' 2
I I'2
1
R jX1
m
jX
0
I
a = N1/N2
s R2
Untuk menghasilkan rangkaian ekivalen per-fasa akhir dari motor induksi,
penting untuk menyatakan bagian rotor dari model rangkaian ekivalen gambar 2.2 di atas terhadap sisi stator. Pada transformator yang umum, tegangan, arus, dan
impedansi pada sisi sekunder dapat dinyatakan terhadap sisi stator dengan menggunakan rasio perbandingan belitan dari transformator tersebut. Dengan mengasumsikan jenis rotor yang digunakan adalah jenis rotor belitan dan
terhubung bintang ( Y ), yang mana motor dengan rotor jenis ini sangat mirip dengan transformator, maka kita dapat melakukan hal tersebut pada motor induksi
tiga fasa juga.
Jika rasio perbandingan efektif dari sebuah motor induksi adalah a (= N1/N2), maka pentransformasian tegangan rotor terhadap sisi stator menjadi:
………. (2.6)
untuk arus rotor :
………. (2.7)
dan untuk impedansi rotor :
= = = ……….. (2.8)
=
+
2 2
jX s R
dengan penguraian lebih lanjut :
= a2 R2 ………... (2.9)
Dari persamaan di atas maka dapat kita gambarkan rangkaian ekivalen
per-fasa motor induksi sebagai kelanjutan dari gambar 2.2, dimana disini bagian rangkaian rotor telah dinyatakan terhadap bagian stator. Rangkaian ekivalen
tersebut dapat dilihat pada gambar 2.3(a), sedangkan pada gambar 2.3(b)
merupakan modifikasi dari gambar 2.3(a) dimana adanya R2
−1 1
s menyatakan
resistansi variabel sebagai analog listrik dari beban mekanik variabel.
c R m I c I 0 I 1 I 1
V E1
s R2'
1
R jX1 '
2 jX m jX '' 2 I +
-(a) cR Im
c I 0 I 1 I ) 1 1 ( ' 2 − s R 2 ' R 1
V E1
1 R '' 2 I ' 2 jX 1 jX m jX +
-(b)Gambar 2.3. Rangkaian Ekivalen per-Fasa Motor Induksi dengan Bagian Rangkaian Rotor Dinyatakan Terhadap Sisi Stator
(a) dengan tahanan variabel
s R2'
(b) dengan tahanan variabel 2'(1−1)
s
Pada transformator, analisis rangkaian ekivalen dilakukan dengan
mengabaikan cabang pararel yang terdiri dari Rc dan Xm, atau dengan
memindahkan cabang pararel ke terminal primer. Bagaimanapun, penyederhanaan
ini tidak diperbolehkan pada rangkaian ekivalen motor induksi. Ini disebabkan kenyataan bahwa arus penguatan pada transformator bervariasi dari 2% sampai 6% dari arus beban penuh dan per unit reaktansi bocor primer kecil. Tetapi pada
masalah motor induksi, arus penguatan bervariasi dari 30% sampai 50% dari arus beban penuh dan per unit reaktansi bocor stator adalah lebih tinggi. Dengan
demikian kesalahan yang besar akan terjadi dalam penentuan daya dan torsi, dalam hal cabang pararel diabaikan, atau dihubungkan pada terminal stator.
Dibawah kondisi kerja normal pada tegangan dan frekuensi konstan, rugi
inti pada motor induksi biasanya juga konstan. Dalam pandangan pada kenyataan ini, tahanan rugi inti Rc yang mewakili rugi inti motor, dapat dihilangkan dari
rangkaian ekivalen motor induksi pada gambar 2.3(b). Akan tetapi, untuk menentukan daya poros atau torsi poros, rugi inti yang konstan harus diikut-sertakan dalam pertimbangan, bersama dengan gesekan, rugi-rugi beban buta
(stray-load losses) dan angin. Dengan penyederhanaan ini, maka dapat digambar rangkaian ekivalen baru (gambar 2.16.) dengan akurasi rugi yang dapat diabaikan.
0 I 1 I ) 1 1 ( ' 2 − s R 2 ' R 1
V E1
1
R jX1 jX2'
m jX '' 2 I +
BAB III
KINERJA MOTOR INDUKSI TIGA FASA YANG DISUPLAI SUMBER SATU FASA
3. 1. Parameter Motor Induksi Tiga Fasa
Parameter rangkaian ekivalen dapat dicari dengan melakukan pengukuran
pada percobaan tahanan DC, percobaan beban nol, dan percobaan rotor tertahan ( block- rotor). Dengan penyelidikan pada setiap rangkaian ekivalen,percobaan
beban nol motor induksi dapat disimulasikan dengan memaksimalkan tahanan
rotor s R'2
. Hal ini bisa terjadi pada keadaan normal jika slip dalam nilai yang
minimum. Slip yang mendekati nol terjadi ketika tidak ada beban mekanis, dan
mesin dikatakan dalam keadaan berbeban ringan.
Pengukuran rotor tertahan dilakukan dengan menahan rotor tetap diam. Pada kondisi ini slip bernilai satu yang merupakan nilai slip tertinggi untuk
kondisi motor, jadi nilai s R'2
bernilai minimum.Untuk menentukan bentuk
rangkaian ekivalen, pola fluksi dianggap sinusoidal, demikian juga rugi-rugi yang diukur proporsional terhadap fluksi utama, dan kejenuhan diabaikan.
3. 1. 1 Percobaan DC
Untuk memperoleh harga R dilakukan dengan percobaan DC yaitu dengan 1
menghubungkan sumber tegangan DC (VDC) pada dua terminal stator secara
bergantian dan arus DC-nya (IDC) diukur. Didapatnya arus yang mengalir pada
membagi tegangan dengan arus.Pada rotor tidak ada arus yang mengalir yang
disebabkan tidak adanya tegangan yang terinduksi dari stator ke rotor..
1. Belitan Hubungan Wye (Y)
Gambar rangkaian sewaktu belitan motor induksi tiga fasa terhubung Y, dan diberi suplai DC, maka dapat dilihat pada Gambar 3.6 di bawah ini.
Gambar 3.1 Rangkaian Fasa Stator Saat Pengukuran DC
Harga RDC dapat dihitung, untuk kumparan dengan hubungan Y, adalah
sebagai berikut :
DC DC DC
2 1 I V
R = ( Ohm ) ...(3.1)
2. Kumparan Hubungan Delta (∆)
Gambar rangkaian ketika kumparan motor induksi tiga fasa terhubung
delta dan diberi suplai DC, dapat dilihat pada Gambar 3.2.
Gambar – 3.2 Rangkaian pengukuran tahanan DC dengan kumparan terhubung delta
a
b
c
RDC
RDC
RDC
VDC
+ -IDC
A
R
R
BC
R
DCV
Diketahui bahwa tahanan pada kumparan pada masing – masing fasa
adalah sama, maka RA =RB =RC =RDC. Gambar 3.2 dapat disederhanakan
menjadi Gambar 3.3 berikut.
Gambar 3.3. Rangkaian pengukuran tahanan DC dengan kumparan terhubung delta(Δ) yang disederhanakan
Dimana R = P RB +RC Jadi R = A
A DC I V Dimana P A P DC A R R R I I + × =
IA IDC
3 2
=
Maka:
R = A
DC DC I V 3 2
RDC =
DC DC I V × 2 3
Untuk mendapatkan harga R , maka harga ac RDC ini dinaikkan dengan
faktor pengali 1,1-1,5 untuk operasi arus bolak-balik, karena pada operasi arus
bolak-balik resistansi konduktor meningkat karena distribusi arus yang tidak merata akibat efek kulit dan medan magnet yang melintasi alur.
R1ac =k×R1DC ( Ohm ) ...(3.2)
Dimana k =faktor pengali, besarnya 1,1 – 1,5
A
R
R
PKarena besar tahanan konduktor stator dipengaruhi oleh suhu, dan
biasanya bila rugi-rugi motor ditentukan dengan pengukuran langsung pada motor, maka untuk mengetahui nilai tahanan yang paling mendekati, biasanya
dilakukan dengan beberapa kali pengukuran dan mengambil besar rata-rata dari semua pengukuran yang dilakukan.
3. 1.2 Percobaan Beban Nol
Pada percobaan beban nol motor induksi, motor tersebut dioperasikan pada rating tegangan dan frekuensinya dengan tidak memikul beban .Besarnya
nilai arus yang digunakan pada motor adalah I0 dan nilai teganagn masukannya
adalah V1(tegangan nominal) dengan daya beban nolnya P0.Semua parameter ini
didapat melaui alat ukur yang terpasang pada percobaan
Dalam percobaan beban nol, kecepatan motor induksi mendekati
kecepatan sinkronnya. Dimana besar s 0, sehingga s R2'
~ sehingga besar
impedansi total bernilai tak berhingga yang menyebabkan arus I'2 pada Gambar
3.8 bernilai nol sehingga rangkaian ekivalen motor induksi pada pengukuran beban nol ditunjukkan pada Gambar 3.9. Namun karena pada umumnya nilai
kecepatan motor pada pengukuran ini n yang diperoleh tidak sama dengan nr0 s
maka slip tidak sama dengan nol sehingga ada arus I2’ yang sangat kecil mengalir
pada rangkaian rotor, arus I'2 tidak diabaikan tetapi digunakan untuk menghitung
rugi – rugi gesek + angin dan rugi – rugi inti pada percobaan beban nol. Pada
Gambar 3.4 Bentuk lain rangkaian ekivalen motor induksi dilihat dari sisi stator
Gambar 3.5 Rangkaian Ekivalen pada Saat Beban Nol
Dengan tidak adanya beban mekanis yang terhubung ke rotor dan tegangan normal diberikan ke terminal, dari Gambar 3.10 didapat besar sudut fasa
antara arus antara I dan 0 V adalah : 0
= − 0 0 0 1 0 I V P Cos
θ ...(3.3)
Dimana: P0 =Pnl =daya saat beban nol perfasa
1 0 V
V = = V = tegangan masukan saat percobaan beban nol nl
nl I I
I0 = 1 = = arus beban nol
dengan P0 adalah daya input perfasa. Sehingga besar E1 dapat dinyatakan dengan
E1 V0 0 (I0 0)(R1 jX1)
o − ∠− +
∠
= θ (Volt )...(3.4) 1
V
1
R X1
c R m X 2 ' R ' 2 X ) 1 1 ( ' 2 − s R 1 E 1
I I0
c I m I 2 ' I Zm V1
I1 = If
Im Ic Rc jX1 R1 Xm s R'2 2
'
X
0
ro
n adalah kecepatan rotor pada saat beban nol. Daya yang didissipasikan oleh Rc
dinyatakan dengan :
1 2 0 0
c P I R
P = − ( Watt )...(3.5)
1
R didapat pada saat percobaan dengan tegangan DC.
Harga Rc dapat ditentukan dengan
0 2 1 c P E
R = (Ohm ) ...(3.6)
Dalam keadaan yang sebenarnya R lebih kecil jika dibandingkan dengan 1 X m
dan juga R jauh lebih besar dari c X , sehingga impedansi yang didapat dari m
percobaan beban nol dianggap jX dan 1 jX yang diserikan. m
nl Z = 3 1 nl I V
≅ j(X1+Xm) ( Ohm ) ...(3.7)
Sehingga didapat 1 1 3 X I V X nl
m = − ( ohm )...(3.8)
3. 1. 3 Percobaan Rotor Tertahan
Pada pengukuran ini rotor dipaksa tidak berputar (n = 0, sehingga s = 1) r
dan kumparan stator dihubungkan dengan tegangan seimbang. Karena slip s = 1,
maka pada Gambar 3.2, harga '2 ' 2
R s R
= . Karena R2' + jX2' << Rc jXm maka
arus yang melewati Rc jXm dapat diabaikan. Sehingga rangkaian ekivalen
motor induksi dalam keadaan rotor tertahan atau hubung singkat seperti
Gambar 3.6 Rangkaian Ekivalen Pada Saat Rotor Tertahan dengan mengabaikan Rc & Xm
Impedansi perfasa pada saat rotor tertahan (ZBR) dapat dirumuskan sebagai
berikut:
ZBR =R1 +R2' + j(X1+X2')=RBR + jXBR( Ohm ) ...(3.9)
Pengukuran ini dilakukan pada arus mendekati arus rating motor. Data
hasil pengukuran ini meliputi : arus input (I1 =IBR), tegangan input (V1 = V ) BR dan daya input perfasa ( P = PBR in ). Karena adanya distribusi arus yang tidak
merata pada batang rotor akibat efek kulit, harga R menjadi tergantung '2
frekuensi. Maka berdasarkan IEEE 112, pengukuran rotor tertahan dilakukan
dengan menggunakan frekuensi maksimal ( fBR) sebesar 25% dari frekuensi rated
untuk mendapatkan harga R yang sesuai dengan frekuensi rotor pada saat slip 2'
rating. Dari data-data tersebut, harga RBR dan XBR dapat dihitung :
2 1 BR BR
I P
R = (Ohm ). ...(3.10)
'
2 1 R R
RBR = + (Ohm ) ...(3.11)
BR BR BR
I V
Z = (Ohm ) ...(3.12)
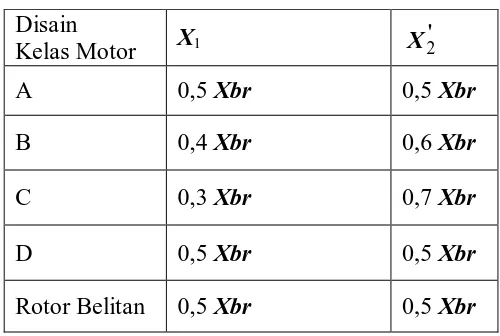
Untuk menentukan harga X1 dan X2 digunakan metode empiris
berdasarkan IEEE standar 112. hubungan X1 dan X2 terhadap Xbr dapat dilihat
[image:34.595.186.436.184.352.2]pada Tabel 3.3
Tabel 3. 1 Distribusi Empiris dari Xbr Disain
Kelas Motor X1
' 2
X
A 0,5 Xbr 0,5 Xbr
B 0,4 Xbr 0,6 Xbr
C 0,3 Xbr 0,7 Xbr
D 0,5 Xbr 0,5 Xbr
Rotor Belitan 0,5 Xbr 0,5 Xbr
di sini besar XBR harus disesuaikan dahulu dengan frekuensi rating f.
BR BR
'
X f
f X
BR
= (Ohm ) ...(3.14)
2 ' 1 '
X X
XBR = − (Ohm ... (3.15)
3.2 Menjalankan Motor Induksi Tiga Fasa Pada Sistem Satu Fasa 3.2.1 Umum
Secara umum, untuk mengoperasian motor induksi tiga fasa pada sistem tenaga satu fasa dengan menggunakan kapasitor dapat dilakukan dengan cara mengubah bentuk rangkaian kumparan stator motor induksi 3-fase menjadi seperti
rangkaian motor induksi 1-fase jenis motor kapasitor.Seperti yang kita ketahui ,motor kapasitor memiliki kumparan utama dan kumparan bantu. Oleh karena itu,
kumparan bantu akan dipasang kapasitor baik start maupun run.Banyak metode
yang telah berkembang di masa sekarang ini dalam membagi kumparan motor induksi tiga fasa agar dapat dioperasikan pada sistem satu fasa.
Setelah membagi motor induksi tiga fasa dibagi menjadi kumparan bantu dan kumparan utama berdasarkan metode yang digunakan(steinmetz dan semihex),maka tahap selanjutnya menentukan besarnya nilai kapasitor start
maupaun run.
Secara umum, penentuan nilai kapasitor start bertujuan agar torsi start
yang dihasilkan maksimum.Untuk mendapatkan torsi start yang maksimum,maka nilai sinθ haruslah maksimum sehingga beda sudut antara kumparan bantu dan
utama haruslah bernilai 90o yang sesuai persamaan dibawah ini
Ts = KImIasinθ...(3.16)
Pada motor induksi satu fasa kapasitor penentuan nilai kapasitor yang
dibutuhkan agar beda sudut antara kumparan bantu dan kumparan utama 90o ,maka dapat ditentukan melalui rumus berikut
θ
= θ
a +θ
m...(3.17)θ
m = arc .tanθ
a=
arc. tanAkibat beda fasa yang besar ini ,maka medan magnit putar yang dihasilkan oleh kumparan stator akn menjadi besar dan dengan sendirinya gaya putar akan
menjadi besar pula.Untuk
θ
= 90
0,maka θa + θm = 900tan θa = tan(900 –
θ
m)
=
=
Dari persamaan diatas
Xc =
=
Xa+
...(3.18)Maka niai kapasitor yang dipasang agar torsi maksimum adalah
C
=
...(3.19)Dalam mengoperasikan motor induksi tiga fasa pada sistem satu fasa, nilai kapasitor yang digunakan memiliki ketentuan tertentu.Ketentuan nilai kapasitor
minumum yang dipasang agar motor dapat berputar adalah daya reaktif motor induksi tiga fasa haruslah sama dengan daya reaktif motor induksi tiga fasa sewaktu dihubungkan dengan sumber satu fasa. Bila motor tiga fasa mempunyai daya P dengan faktor daya cosθ,berarti motor ini pada tegangan V dan arus I akan
mempunyai daya reaktif VAR3ph= V.I.sinθ.Bila diinginkan kapasitor C yang
digunkan mempunyai daya reaktif yang sama dengan motor induksi tiga fasa
,maka akan diperoleh nilai C yaitu
Q3ph = Q1ph
P3phtanθ = V1phIc
P3phtanθ Xc= V1ph2Ic
Ketika motor distart dengan menggunakan kapasitor dan setelah motor
berputar pada kecepatan tertentu,maka kapasitor start dilepas dari motor.Hal ini bertujuan untuk mengurangi arus ketika motor akan dibebani.Namun,pada kondisi
tersebut motor akan mengalami perubahan kinerja yang signifikan tiap kali perubahan beban.Untuk mengatasi hal tersebut maka dipasanglah suatu kapasitor run yang nilai jauh lebih kecil dari kapasitor start.Penambahan kapasitor run akan
sangat berpengaruh pada kinerja motor yang slah satunya yaitu akan mengurangi bagian yang negatif dari kinerja motor.Dengan memilih nilai kapasitor run yang
tepat,maka daya dan torsi urutan negatif dapat dikurangi sehingga motor dapat beroperasi dalam keadaan yang stabil.Menentukan nilai kapasitor start berbeda dengan kapasitor run.Untuk penentuan kapasitor run haruslah berpedoman pada
rating arus maksimum motor yang akan kita opersaikan. Bila diinginkan motor induksi 3-fasa bekerja pada sistem tenaga 1-fasa tanpa melewati batas arus
nominal kumparannya (Iph), maka nilai kapasitansi kapasitor (C) yang dipakai adalah
C= ...(3.21)
3.2.2. Menjalankan Motor Induksi Tiga Fasa Pada Sistem Satu Fasa Dengan Metode Steinmetz
Metode Steinmetz merupakan metode yang pertama kali ditemukan untuk menjalankan motor induksi tiga fasa pada sistem satu fasa .Orang yang
menemukan metode ini adalah J. E. Brown, B.Sc, Ph.D.
padanya ditambahkan sebuah kapasitor.Metode steinmetz dapat dikondisikan
sebagai suatu motor induksi tiga fasa hubungan star yang salah satu kumparan statornya terbuka namun pada kumparan stator yang terbuka tersebut
disambungkan melalui sebuah kapasitor ke salah satu kumparan stator lainnya.Penambahan kapasitor dapat berupa kapasitor start maupu run.
Xc V
Va
Vb Vc
Ib Ic
Va
Ia
Gambar 3.7. Rangkaian Ekivalen Stator Motor yang Disuplai Sumber Satu Fasa Metode Steinmetz
Pemilihan nilai kapasitor run maupun start memegang peranan penting dalam mengoperaikan motor induksi tiga fasa pada sistem satu fasa.Jika terlalu
kecil nilai kapasitor yang digunakan maka motor yang dioperaikan pada sistem satu fasa tidak dapat berputar namun jika terlalu besar nilai kapasitor yang digunkan maka pada masing-masing kumparan akan mengalir arus yang besar
3.2.2.1 Analisa rangkaian Motor Induksi Tiga Fasa yang disuplai Satu Fasa Metode Steinmetz
Karena suplai pada motor induksi tiga fasa adalah satu fasa, maka pada
masing-masing kumparan stator akan memikul tegangan yang berbeda-beda.Untuk itu rangkaian motor induksi tiga fasa yang disuplai satu fasa akan dianalisa menggunakan komponen simetris.
Berdasarkan gambar dari rangkaian metode steinmetz,maka dapat dituliskan hubungan arus dan tegangan dengan menggunakan hukum kirchoff sebagai
berikut:
IA + IB + IC = 0...(3.22)
V - VA + VB = 0...(3.23)
VA - VC - = 0...(3.24)
Dimana V adalah tegangan sumber satu fasa, VA, VB , VC adalah tegangan
masing-masing kumparan stator dan IA ,IB , IC adalah arus yang mengalir pada
masing-masing kumparan stator. Selanjutnya,untuk menentukan persamaan torsi dan daya keluar,maka dapat dianalisa dengan mengguanakan metode komponen
simetris.Karena motor induksi tiga fasa disuplai dengan sumber satu fasa,maka tegangan pada masing-masing kumparan stator menjadi tidak setimbang sehingga
persamaan masing-masing tegangan pada kumparan menjadi
VA = V0 + Vp + Vn ...(3.25)
VB = V0 + Vp + Vn...(3.26)
VC = V0 + Vp + Vn...(3.27)
IB = I0 + Ip + In...(3.29)
IC = I0 + Ip + In...(3.30)
Dengan mensubtitusi I0 = V0Y0 , Ip = VpYp, In =VnYn maka
IA = V0Y0 + VpYnp+ VnYn...(3.31)
IB = V0Y0 + VpYp + VnYn...(3.32)
IC = V0Y0 + VpYp + VnYn... ...(3.33)
Dimana V0, Vp, Vn adalah tegangan urutan nol, positif, negatif dari fasa A sebagai
acuan dan Y0, Yp, Yn adalah admittansi urutan nol ,positif ,negatif dan nilai
.Dengan mensubtitusikan persamaan 3.25 dan 3.26 ke persmaan 3.23
dan V0 = 0 maka didapat
V – (Vp + Vn ) + ( Vp + Vn) = 0
V= Vp(1 - ) + Vn(1 – a )
Vp + Vn. = V...(3.34)
Kemudian dengan mensubtitusikan persamaan 3.26 dan 3.27 ke persamaan 3.24
sehingga didapat persamaan sebagai berikut
VA - VC - = 0
Vp + Vn - ( Vp + Vn ) =
VpY + VnY = VpYp + VnYn = 0
Vp( Y - Yp ) + Vn( Y - Yn ) = 0...(3.35)
Dengan mengeliminasi persamaan 3.34 dengan 3.35 diatas sehingga didapat
Vp + Vn. = V x( Y - Yn )
( Y - Yp ) Vp+ ( Y - Yn ) Vn= 0. x(
( Y - Yn)Vp - ( Y - Yp)Vn
=V( Y - )
( Y - Yn)Vp - ( Y - Yp)Vn = V( Y - )
Vp(3 Y - Yn - 3 Y + Yp) = V( -
Yn)
Vp =
- - -
-- - -
V
p=
-
-...(3.36
)
Untuk mendapatkan tegangan urutan negatif dapat dilakukan cara
mensubtitusikan persamaan 3.36 ke persamaan 3.13 seperti berikut
Vp + Vn. = V
Vn = V -
-
Vn
=
V -
Vn
Pada kondisi start nilai admintansi positif akan sama dengan admintansi
negatif karena pada saat start nilai s = 1,sehingga Yp=Yn=Ys sehingga persamaan tegangannya menjadi
V
p=
-
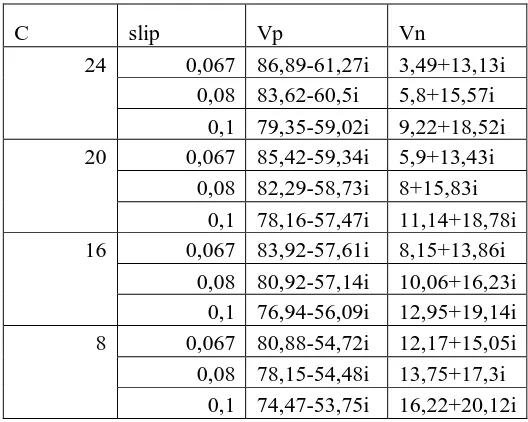
-...(3.38)
V
n=
...(3.39)3.2.3. Menjalankan Motor Induksi Tiga Fasa Pada Sistem Satu Fasa Dengan Metode Semihex.
3.2.3.1 Umum
Seiring bertambahnya zaman ,maka ditemukan penemuan baru untuk menjalankan motor induksi tiga fasa pada sistem satu fasa.Sebelumnya banyak orang menggunakan metode steinmetz untuk menjalankan motor induksi tiga fasa
pada sistem satu fasa.Namun ,metode itu dinilai banyak memiliki kekurangan yang salah satunya sulit menjadikan motor induksi beroperasi dalam tegangan
yang seimbang.Namun,kelebihan metode steinmetz yaitu rangkaiannya sederhana dan tidak perlu melepas hubungan y yang telah terpasang pada belitan stator motor induksi
Pada tahun 1991 ,Proffesor Smith memperkenalkan metode baru yang diharapkan dapat membuat motor induksi dapat bekerja dalam keadaan tegangan
seimbang.Metode tersebut diberi nama SemiHex.Pada metode Semihex
sebelumya metode steinmetz hanya menggunakan satu buah kapasitor .Variasi
nilai kapasitor yang dipasang pada metode semihex akan memungkinkan mendapat nilai variasi yang menghasilkan persen ketidakseimbangan yang
terkecil .Dengan pemasangan tiga buah kapasitor ini diharapkan motor induksi dapat bekerja dengan tegangan yang seimbang sehingga akan menghasilkan kinerja yang lebih baik yaitu torsi dan efisiensi yang lebih baik dibandingkan
dengan metode steinmetz
Gambar 3.8. Rangkaian Ekivalen Stator Motor yang Disuplai Sumber Satu Fasa
Metode SemiHex
Berdasarkan rangkaian semihex berikut ini dan dengan menggunakan hukum
kirchoff ,maka didapat persamaan sebagai berikut ini
IC = I2 + I1...(3.41)
IA + IB + I1+ I3 = 0...(3.42)
I1 = V1Y1 = (VA – VC)Y1...(3.43)
I2 = V2Y2 = (VA- VB – VC)Y2...(3.44)
I3 = VAY3...(3.45)
I = I2 - IB...(3.46)
Agar arus urutan nol tidak ada ,maka penjumlahan ketiga arus belitan stator haruslah berjumlah nol,sehingga dari pernyataan ini didapat persamaan
IA + IB + IC = 0...(3.47)
-IC = IA + IB dimana IC = I2 + I1
IA + IB + I1+ I3 = 0
IC = I1+ I3...(3.48)
Dengan mensubtitusikan IC = I2 + I1 maka didapat persamaan
I2 = I3...(3.49)
Hal yang sama juga kita lakukan terhadap tegangan dimana VA + VB + VC = 0...(3.50)
I2 = (VA- VB – VC)Y2 ,dengan mensubtitusikan nilai VB + VC = -VA maka didapat
I2 = 2VAY2...(3.51)
Karena I2 = I3 ,maka didapat I2 = VAY3 dan dengan mensubtitusikan persamaan
ini maka didapat persamaan sebagai berikut:
Y2 = Y3...(3.52)
Dengan mensubtitusikan nilai I1 = V1Y1 = (VA – VC)Y1 dan I2 = V2Y2 = (VA- VB
– VC)Y2 ke persamaan IC = I2 + I1 maka didapat
IC = (VA – VC)Y1 + (VA- VB – VC)Y2
IC = (VA – VC)Y1 + (2VA)Y2
IC = VA(Y1 + 2Y2) - Y1 VC...(3.53)
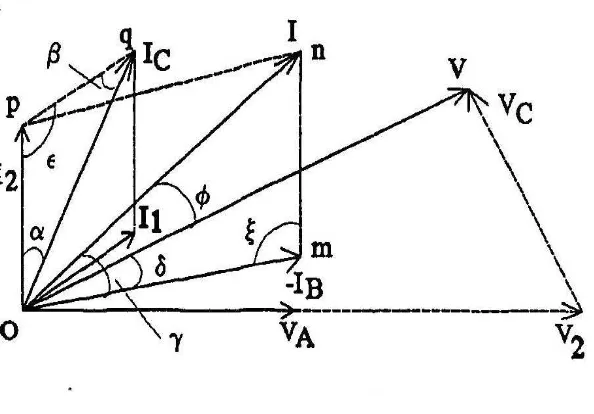
Perlu diingat bahwa arus ketiga phasa belitan stator(IA, IB, IC) tersebut
akan tertinggal dengan tegangan masing-masing fasa(VA,VB,VC) dengan sudut θ
sedangkan I1 dan I2 akan mendahului tegangan V1 dan V2 yang besar sudutnya 900
Walaupun telah menggunakan tiga buah kapasitor ,metode semihex belum dapat mengatasi masalah keseimbangan tegangan .Namun,ketidakseimbangan
metode semihex lebih kecil dibandingkan dengan metode steinmetz.Oleh karena itu pada pada metode semihex,masing-masing kumparan stator juga akan
memikul tegangan yang berbeda-beda sehingga akan menimbulkan komponen
urutan negatif yang sama halnya dengan metode steinmetz.Untuk itu analisa rangkaian metode semihex juga akan menggunakan komponen simetris yang
persamaanya sebagai berikut
VA = V0 + Vp + Vn
VB = V0 + Vp + Vn
VC = V0 + Vp + Vn
IA = I0 + Ip + In
IB = I0 + Ip + In
IC = I0 + Ip + In
Dengan mensubtitusikan nilai IP = YPVp dan In=VnYn ,maka akan didapat
persamaan tegangan urutan positif dan tegangan urutan negatif untuk metode semihex sebagai berikut:
V= Vp + Vn - Vp + Vn
V = ...(3.54)
Kemudian dengan mensubtitusikan persamaan IC = Ip + In ke
persamaan IC = VA(Y1 +2 Y2) - Y1 VC maka didapat persamaan sebagai berikut
IC = VA(Y1 + 2Y2) - Y1 VC
Ip + In = (Vp + Vn) (Y1 + 2Y2) - Y1( Vp + Vn)
VpYp + VnYn = (Vp + Vn) (Y1 + 2Y2) - Y1( Vp + Vn)
VpYp + VnYn = VpY1 + VnY1 + 2VpY2 +2 VnY2 - VpY1 - VnY1
VpY1 + VnY1 + 2VpY2 +2 VnY2 - VpY1 - VnY1 - VpYp - VnYn = 0
Vp(Y1 + 2 Y2 - - ) + Vn(Y1 + 2 Y2 - - ) = 0...(3.55)
Dengan mengeliminasi kedua persamaan diatas ,maka didapat persamaan
sebagai berikut ini:
= V x(Y1 + 2 Y2 - - )
Vp(Y1 + 2 Y2 - - ) + Vn(Y1 + 2 Y2 - - ) = 0 x
Maka didapat persamaan sebagai berikut ini
) - Vp(Y1 + 2 Y2 - - )
=V(Y1 + 2 Y2 - - )
=V(Y1 + 2 Y2 - - )
= V(Y1 + 2 Y2 - - )
= V (Y1 + 2 Y2 - - )
VP =
.
...(3.56)Untuk tegangan urutan negatif maka subtitusikan persamaan VP ke persamaan V =
maka didapat persamaan sebagai berikut:
V =
= V -
V -
=
=
Vn = ...(3.57)
Agar motor dapat beroperai seperti motor tiga fasa ,maka tegangan urutan negatif
pada metode semihex haruslah ditiadakan sehingga Vn=0 maka didapat persamaan
Vn =
0 =
Maka ...(3.58)
Gambar 3.9 Diagram phasor metode semihex pada keadaan seimbang
Dengan mensubtitusikan persamaan ke masing –
masing nilai admintansi kapasitor terpasang(Y1 = jB1, Y2 = jB2, Y3 = jB3) didapat
persamaan sebagai berikut:
B1 = ...(3.59)
B2 = ...(3.60)
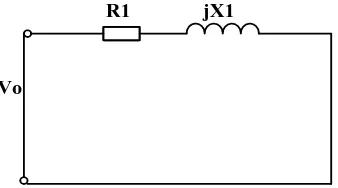
3.2.4 Rangkaian Urutan Nol,Positif dan Negatif Motor Induksi
Dengan mengabaikan nilai Rc maka rangkaian ekivalen motor induksi
pada saat berputar masing –masing untuk urutan nol, positif dan negatif dapat digambarkan sebagai berikut
R1 jX1
[image:49.595.158.327.515.609.2]Vo
Vp
R1 jX1
jXm
jX2'
R2'/s Ip
Gambar 3.12. Rangkaian Ekivalen Urutan positif Motor Induksi
jXm
jX2'
R2'/2-s In R1 jX1
Vn
Gambar 3.13. Rangkaian Ekivalen Urutan negatif Motor Induksi
Karena urutan nol diabaikan maka hanya nilai urutan positif dan negatif yang dianalisa.Selanjutnya motor inuksi tiga fasa yang disuplai satu fasa dapat
disamakan dengan motor tiga fasa dengan suplai tak seimbang.Nilai masing impedansi urutan positif dan negatif masing-masing sebagai berikut
Zp = R1 + jX1 + . ...(3.61)
Zn = R1 + jX1 +
-...(3.62)
Untuk nilai arus rotor urutan positif dan negatif masing-masing sebagai berikut
I2n = In ...(3.64)
3.3 Aliran Daya,Torsi dan Efisiensi Pada Motor Induksi Yang Disuplay Satu
Fasa
3.3.1 Aliran Daya
Pada motor induksi, tidak ada sumber listrik yang langsung terhubung ke
rotor, sehingga daya yang melewati celah udara sama dengan daya yang diinputkan ke rotor. Daya total yang dimasukkan pada kumparan stator (Pin)
dirumuskan dengan
Pin =V1I1cosθ ( Watt )...(3.65) Karena motor induksi disuplai satu fasa sehingga akan timbul daya urutan positif dan daya urutan negatif.Urutan positif mengakibatkan putaran searah dengan putaran motor induksi keadaan normal sedangkan urutan negatif mengakibatkan
putaran berlawanan arah dengan motor induksi keadaan normal.Untuk urutan positif nilai slip sama dengan motor induksi keadaan normal sedangkan urutan
negatif slipnya berbeda yaitu (2-s) . Untuk mendapatkan persamaan daya masukan motor induksi tiga fasa yang dioperasikan pada sistem satu fasa terlebih dahulu harus mencari persamaan tegangan urutan positif dan negatif untuk masing –
masing phasa serta arus urutan positif dan urutan negatif untuk masing-masing phasa.Persamaan waktu tegangan dan arus motor induksi tiga fasa saat
dioperasikan pada sistem satu fasa adalah sebagai berikut:
va (t) = Vpcos(ωt +θvp) + Vncos(ωt + θvn)...(3.66)
vc (t) = Vpcos(ωt + θvp + 240 ) + Vncos(ωt + θvn - 240 )...(3.68) ia (t) = Ipcos(ωt + θvp – φp) + Incos(ωt + θvn – φn) ...(3.69) ib (t) = Ipcos(ωt + θvp – φp - 240 ) + Incos(ωt + θvn – φn + 240 )...(3.70) ic (t) = Ipcos(ωt + θvp – φp + 240 ) + Incos(ωt + θvn – φn - 240 )...(3.71)
dimana Ip dan In adalah arus urutan positif dan arus urutan negatif sedangkan Vp
dan Vnadalah tegangan urutan positif dan tegangan urutan negatif sedangkan φp
dan φn adalah sudut dari impedansi positif dan impedansi negatif. Pa (t) = va ia
= ( Vpcos(ωt + θvp) + Vncos(ωt + θvn ))( Ipcos(ωt + θvp – φp)
+ Incos(ωt + θvn – φn))
= 2(VpIpcos(ωt + θvp )cos(ωt + θvp – φp) + VpIncos(ωt + θvp) cos(ωt + θvn – φn))
+ VnIpcos(ωt + θvn )cos(ωt + θvp – φp) + VnIncos(ωt + θvn )cos(ωt + θvn – φn))
Dengan menggunakan rumus kosinus dimana:
2cosx.cosy = cos(x + y) + cos(x – y) sehingga didapat
cos(ωt + θvp )cos(ωt + θvp – φp) = ½( cos(2ωt + 2θvp – φp) + cosφp)
cos(ωt + θvp) cos(ωt + θvn – φn) = ½ (cos(2ωt + θvp+ θvn – φn) +cos( θvp- θvn + φn))
cos(ωt + θvn )cos(ωt + θvp – φp) = ½ (cos(2ωt + θvp+ θvn – φn) +cos( θvp - θvp +φp))
cos(ωt + θvn )cos(ωt + θvn – φn) = ½ ( cos(2ωt + 2θvn – φn) + cosφn)
sehingga diperoleh persmaan
Pa (t) = VpIp( cos(2ωt + 2θvp – φp) + cosφp ) + VpIn (cos(2ωt + θvp+ θvn – φn)
+ cos( θvp - θvn + φn)) + VnIp(cos(2ωt + θvp+ θvn – φn) + cos( θvp - θvp +
= ( Vpcos(ωt + θvp - 240 ) + Vncos(ωt + θvn + 240 ))( Ipcos(ωt+ θvp – φp
- 240 ) + Incos(ωt + θvn – φn + 240 ))
= 2(VpIpcos(ωt + θvp - 240 )cos(ωt+ θvp – φp - 240 ) + VpIncos(ωt + θvp - 240 )
cos(ωt + θvn – φn + 240 ) + VnIpcos(ωt + θvn + 240 )cos(ωt+ θvp – φp - 240 ) +
VnIncos(ωt + θvn + 240 )cos(ωt+ θvn – φn + 240 )
Dimana
cos(ωt + θvp - 240 )cos(ωt+ θvp – φp - 240 ) = ½(cos(2ωt+ 2θvp– φp - 480 )+ cosφp)
cos(ωt + θvp - 240 ) cos(ωt + θvn – φn + 240 ) = ½(cos(2ωt+ θvp + θvn – φn) +
cos(θvp - θvn+ φn - 480 )
cos(ωt + θvn + 240 )cos(ωt+ θvp – φp - 240 ) = ½(cos(2ωt+ θvn + θvp – φp) +
cos( θvn - θvp+ φp + 480 )
cos(ωt + θvn + 240 )cos(ωt + θvn – φn + 240 ) = ½(cos(2ωt+2θvn– φp- 480 )+cosφn)
sehingga diperoleh persamaan
Pb (t) = VpIp(cos(2ωt+ 2θvp– φp - 480 )+ cosφp) + VpIn(cos(2ωt+ θvp + θvn – φn) +
cos(θvp - θvn+ φn - 480 ) + VnIp(cos(2ωt+ θvn + θvp – φp) + cos( θvn - θvp+ φp + 480 ) + VnIn(cos(2ωt+2θvn– φp- 480 )+cosφn)
Pc (t) = vc ic
=( Vpcos(ωt + θvp + 240 ) + Vncos(ωt + θvn - 240 ))( Ipcos(ωt + θvp – φp
= 2(VpIpcos(ωt + θvp + 240 )cos(ωt + θvp – φp + 240 ) + VpIncos(ωt + θvp + 240 )
cos(ωt + θvn – φn - 240 ) + VnIpcos(ωt + θvn - 240 )cos(ωt + θvp – φp + 240 ) + VnIn
cos(ωt + θvn-240 ) cos(ωt + θvn – φn - 240 )
Dimana
cos(ωt + θvp + 240 )cos(ωt + θvp – φp + 240 ) = ½(cos(2ωt+ θvp– φp+ 480 )+cosφp)
cos(ωt + θvp + 240 ) cos(ωt + θvn – φn - 240 ) =½(cos(2ωt+ θvp + θvn – φn) +
cos(θvp - θvn+ φn + 480 )
cos(ωt + θvn - 240 )cos(ωt + θvp – φp + 240 ) = ½(cos(2ωt+ θvn + θvp – φp) +
cos( θvn - θvp+ φp - 480 )
cos(ωt + θvn-240 ) cos(ωt + θvn – φn - 240 ) = ½(cos(2ωt+2θvn– φn- 480 )+cosφn)
sehingga diperoleh persamaan
Pc (t) =VpIp(cos(2ωt+ 2θvp– φp + 480 )+ cosφp) + VpIn(cos(2ωt+ θvp + θvn – φn) +
cos(θvp - θvn+ φn + 480 ) + VnIp(cos(2ωt+ θvn + θvp – φp) + cos( θvn - θvp+ φp - 480 ) + VnIn(cos(2ωt+2θvn– φn- 480 )+cosφn)
Maka total daya input motor induksi yang dioperasikan pada sistem satu fasa
adalah sebagai berikut: P(t) = Pa (t) + Pb(t) + Pc (t)
= VpIp( cos(2ωt + 2θvp – φp) + cosφp ) + VpIn (cos(2ωt + θvp+ θvn – φn)
+ cos( θvp - θvn + φn)) + VnIp(cos(2ωt + θvp+ θvn – φp) + cos( θvp - θvp +
φp)) + VnIn(cos(2ωt + 2θvn – φn) + cosφn) + VpIp(cos(2ωt+ 2θvp– φp -
480 )+ cosφp) + VpIn(cos(2ωt+ θvp + θvn – φn) + cos(θvp - θvn+ φn - 480 )
+ VnIp(cos(2ωt+ θvn + θvp – φp) + cos( θvn - θvp+ φp + 480 ) + VnIncos(2ωt
(cos(2ωt+ θvp + θvn – φn) + cos(θvp - θvn+ φn + 480 ) + VnIp(cos(2ωt+ θvn + θvp– φp) +cos( θvn - θvp+ φ -480 ) +VnIn(cos(2ωt+2θvn– φn-480 )+cosφn)
Misalkan cos(2ωt + 2θvp – φp) = cosK maka :
cos K + cos(K - 480 ) + cos(K + 480 ) = cos K + cosKcos480 + sinKsin480
+ cosKcos480 - sinKsin480 = cosK + 2cosKcos480 = 2cosK(1/2 + cos480 )
= 2cosK(cos60 + cos480 ) = 0
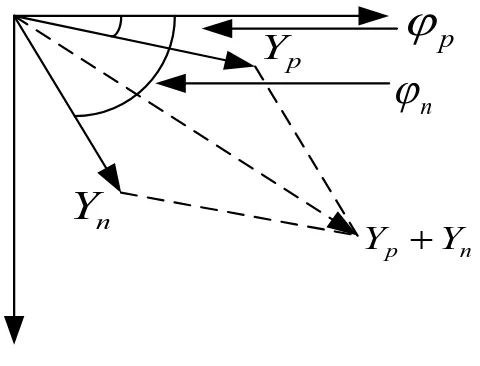
Sehingga didapat persamaan
P(t) = 3VpIpcosφp + 3VnIncosφn + 3VpIn (cos(2ωt + θvp+ θvn – φn)
+ 3VnIp(cos(2ωt + θvp+ θvn – φp)...(3.72)
Ketika motor bekerja pada tegangan yang seimbang maka persamaannya ialah
P(t) = 3VpIpcosφp
Karena nilai VnIn sama dengan nol,maka selisih dayanya menjadi:
D P(t) = 3VpIn (cos(2ωt + θvp+ θvn – φn) + 3VnIp(cos(2ωt + θvp+ θvn – φp)
atau dengan mensubtitusikan nilai Ip = VpYp , In = VnYn ke persamaan D P(t)
maka didapat persamaan sebagai berikut
D P(t) = 3VpVnYn (cos(2ωt + θvp+ θvn – φn) + 3VnVpYp (cos(2ωt + θvp+ θvn – φp)
D P(t) = 3VpVn(Yn (cos(2ωt + θvp+ θvn – φn) +Yp (cos(2ωt + θvp+ θvn – φp))
n
ϕ
p
ϕ
n
Y
p
Y
n
p
Y
[image:56.595.195.435.94.277.2]Y
+
Gambar Pasor admintansi rangkaian urutan positif dan urutan negatif
Berdasarkan diagram phasor diatas maka resultan admintansi dapat ditulis sebagai berikut:
Yr = 1/2...(3.74)
Dengan mensubtitusikan persamaan diatas maka didapat persamaan sebagai berikut ini:
D P = 3VpVn 1/2...(3.75)
Karena motor induksi tiga fasa dijalankan pada sistem satu fasa ,maka pada
masing-masing kumparan stator akan mengalami tegangan yang tak seimbang.Tegangan tak seimbang tersebut akan membuat motor induksi akan mengalami denyutan(pulsating) baik daya maupun torsi setiap kali pertambahan
beban.Rumus daya pulsating (D P) sangat dipengaruhi oleh besarnya tegangan
Dari persamaan P(t) diatas maka dapat disederhanakan menjadi persamaan
sebagai berikut ini:
Daya aktif pada motor induksi
Pin = Re[ 3(VpIp* + VnIn*)]...(3.76)
Daya reaktif pada motor induksi
Qin = Im[ 3(VpIp* + VnIn*)]...(3.77)
Untuk faktor daya motor induksi adalah sebagai berikut
PF = cos ...(3.78)
Dimana:
Vp = tegangan sumber urutan positif (V)
Vn = tegangan sumber urutan negatif (V)
Ip = arus masukan urutan positif(Ampere)
In = arus masukan urutan negatif(Ampere)
θ = perbedaan sudut fasa antara arus masukan dengan tegangan sumber
Sebelum daya ditransfer melalui celah udara, motor induksi mengalami
rugi-rugi berupa rugi-rugi tembaga stator (PSCL) dan rugi-rugi inti stator (PC).
Daya yang ditransfer melalui celah udara (PAG) sama dengan penjumlahan
rugi-rugi tembaga rotor (PRCL) dan daya yang dikonversi (Pconv). Daya yang melalui
Rugi tembaga stator pada motor sebagai berikut
PSCL = (Isa2 + Isb2 + Isc2)R1...(3.79)
Untuk rugi tembaga pada rotor sebagai berikut
PRCL = (Ira2 + Irb2 + Irc2)R2...(3.80)
Daya yang ditranfer melalui celah udara
AG
P = PAG1 + PAG2...(3.81)
PAG1= 3
I
2p 2...(3.82)
PAG2 = 3I2n2 ...(3.83)
Dimana S2 = 2- S dan S1 = S
Hubungan antara rugi-rugi tembaga rotor dan daya mekanis dengan daya masukan rotor dinyatakan dengan persamaan sebagai berikut :
AG RCL sP
P = ( Watt )... (3.84)
Pconv = (1- S1)PAG1 + (1-S2)PAG2 ...(3.85)
Diagram aliran daya motor induksi dapat dilihat pada Gambar 3.14 di bawah ini.
r oad out τl ϖ
P =
θ
cos L L in V I P =
Daya celah udara
AG
P Pconv
SCL P
C P
RCL P
W & F
P SLL
P
Gambar 3.14 Aliran Daya Motor Induksi. Dimana :
- PSCL= rugi – rugi tembaga pada kumparan stator (Watt)
- P = rugi – rugi inti pada stator (Watt) C
- P = daya yang ditranfer melalui celah udara (Watt) AG
- PRCL= rugi – rugi tembaga pada kumparan rotor (Watt)
- PF+W= rugi – rugi gesek + angin (Watt)
- PSLL = stray losses (Watt)
- PCONV= daya mekanis keluaran (output) (Watt)
Dari gambar 2.11 dapat dilihat bahwa motor induksi juga mengalami rugi-rugi gesek + angin (PF&W), sehingga daya mekanis keluaran sama dengan daya
yang dikonversi (Pconv) dikurangi rugi-rugi gesek + angin.
3.3.2 Torsi Motor Induksi Tiga Fasa yang Disuplai Satu Fasa.
Torsi motor induksi tiga fasa sewaktu dihubungkan dengan tegangan tiga fasa berbeda dengan torsi ketika motor induksi tersebut dihubungkan dengan
sumber satu fasa.Perbedaan ini diakibatkan karena ketidakseimbangan tegangan pada masing-masing kumparan stator ketika motor tersebut dihubungkan sumber satu fasa.Ketidakseimbangan ini aka mengakibatkan munculnya komponen urutan
negatif yang mana komponen urutan negatif akan berlawanan dengan komponen positif sehingga akan memperkecil ataupun memperlemah torsi motor
induksi.Berikut persamaan torsi urutan positif dan torsi urutan negatif
T = ...(3.87)
T = Tf + Tb
Tf = ...(3.88)
Tb = - ...(3.89)
Dari persamaan daya pulsating maka dapat diturunkan persamaan torsi pulsating dengan cara sebagai berikut ini
(DT) = 3 ...(3.90)
Dimana Rp = dan Rn =
-
Sehinga dengan mensubtitusikan nilai Rp dan Rn maka didapat persamaan
(DT) = 3
3.3.3 Efisiensi
Motor mengubah energi listrik menjadi energi mekanik untuk melayani beban tertentu. Efisiensi motor dapat didefinisikan sebagai “perbandingan keluaran daya
motor yang digunakan terhadap keluaran daya totalnya.” Faktor-faktor yang mempengaruhi efisiensi adalah:
1. Usia. Motor baru lebih efisien. Kapastas. Sebagaimana pada hampir
kebanyakan peralatan, efisiensi motor meningkat
dengan laju kapasitasnya.
2. Kecepatan. Motor dengan kecepatan yang lebih tinggi biasanya lebih efisien. 3. Jenis. Sebagai contoh, motor kandang tupai biasanya lebih efisien daripada
motor cincingeser
4. Suhu. Motor yang didinginkan oleh fan dan tertutup total (TEFC) lebih efisien
daripada motor screen protected drip-proof (SPDP)
5. Penggulungan ulang motor dapat mengakibatkan penurunan efisiensi 6. Beban, seperti yang dijelaskan dibawah
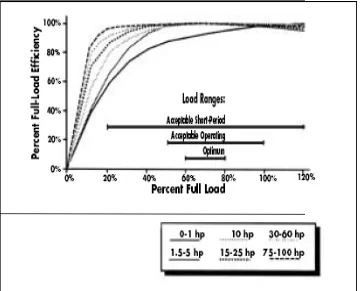
Terdapat hubungan yang jelas antara efisiensi motor dan beban. Pabrik motor membuat rancangan motor untuk beroperasi pada beban 50-100% dan akan paling
efisien pada beban75%. Tetapi, jika beban turun dibawah 50% efisiensi turun dengan cepat seperti ditunjukkan pada Gambar dibawah. Mengoperasikan motor
dibawah laju beban 50% memiliki dampak pada Faktor dayanya. Efisiensi motor yang tinggi dan faktor daya yang mendekati 1 sangat diinginkan untuk operasi yang efisien dan untuk menjaga biaya rendah untuk seluruh pabrik,
Gambar 3.15 Kurva efisiensi Motor Induksi
Untuk alasan ini maka dalam mengkaji kinerja motor akan bermanfaat bila menentukan beban dan efisiensinya. Pada hampir kebanyakan negara, merupakan
persyaratan bagi fihak pembuat untuk menuliskan efisiensi beban penuh pada pelat label motor. Namun demikian,bila motor beroperasi untuk waktu yang
cukup lama, kadang-kadang tidak mungkin untuk mengetahui efisiensi tersebut sebab pelat label motor kadangkala sudah hilang atau sudahdicat.
Untuk mengukur efisiensi motor, maka motor harus dilepaskan sambungannya
dari bebandan dibiarkan untuk melalui serangkaian uji. Hasil dari uji tersebut kemudian dibandingkandengan grafik kinerja standar yang diberikan oleh
pembuatnya.
daya masukan total dan biasanya dinyatakan dalam persen juga sering dinyatakan
dengan perbandingan antara keluaran dengan keluaran ditambah rugi - rugi, yang dirumuskan dalam persamaan berikut.
Loss out
out in
loss in in out
P P
P P
P P P P
+ = − = =
BAB IV
PERHITUNGAN PARAMETER DAN ANALISA KINERJA MOTOR INDUKSI TIGA FASA YANG DISUPLAI SUMBER SATU FASA
4.1 Umum
Untuk mendapatkan parameter dari rangkaian ekivalen motor induksi tiga
fasa, maka dapat dihitung dari data yang didapat dari percobaan beban nol, rotor tertahan ( block rotor ), dan percobaan tahanan DC. Pada percobaan beban nol
dimana tidak ada beban yang terhubung pada poros rotor sehingga putaran rotor dikatakan maksimum. Percobaan rotor tertahan (block rotor) harus dilakukan jauh dibawah keadaan nominal, karena dengan tegangan stator yang kecil sudah
menghasilkan arus yang besar pada rotor. Dipercobaan rotor tertahan putaran rotor
dikatakan dalam keadan minimum (n = 0 ). Untuk percobaan tahanan DC dimana r
pada percobaan ini akan mengukur besarnya tahanan DC pada kumparan motor. Pada percobaan mengoperasikan motor induksi tiga phasa pada sistem satu
phasa bertujuan untuk mengetahui seberapa besar daya yang dapat dihasilkan motor induksi dalam kondisi tersebut.Untuk dapat menjalankan motor induksi tiga
phasa pada sistem satu phasa maka diperlukan komoponen tambahan yaitu kapasitor.Penentuan maksimum dan minimum nilai kapasitor sangat bergantung dari spesifikasi motor induksi tiga phasa yang akan digunakan.Dalam percobaan
ini akan dilihat pengaruh besarnya masing-masing nilai kapasitor terhadap besarnya daya yang disalurkan serta penentuan nilai kapasitor agar effisiensi
induksi tiga phasa pada sisitem satu phasa yang dihasilkan akan dibandingkan
dengan hasil dari perhitungan.
4. 2. Peralatan yang digunakan
Dalam tugas akhir ini penulis menggunakan motor induksi rotor sangkar percobaan yang dilakukan hanya untuk mencari parameter motor tersebut.
Adapun spesifikasi motor dan peralatan yang digunakan adalah:
Data Teknis motor:
Motor Induksi Rotor Sangkar
Merek : LM-Motor Industry
Type : Type B
Pole : 4
Daya Output : 1,5 KW
Tegangan : Δ / Y 220/ 380 Volt
Arus : 6,3 / 3,6 A
Nr : 1400 rpm
Ins Class : B
Berat konduktor
Belitan keseluruhan : 1,2 kg
Cos phi : 0,83
Peralatan Yang Digunakan adalah: 1. Amper meter
2. Volt Meter