BAB II
MOTOR INDUKSI TIGA FASA
2.1 Umum
Motor induksi merupakan motor arus bolak – balik (AC) yang paling luas digunakan dan dapat dijumpai dalam setiap aplikasi industri maupun rumah tangga. Penamaannya berasal dari kenyataan bahwa arus rotor motor bukan diperoleh dari sumber tertentu, tetapi merupakan arus yang terinduksi sebagai akibat adanya perbedaan relatif antara putaran rotor dengan medan putar (rotating magnetic field) yang dihasilkan arus stator.
Hampir semua motor AC yang digunakan adalah motor induksi, terutama motor induksi tiga fasa yang paling banyak dipakai pada perindustrian, karena memiliki banyak keunggulan. Keunggulan motor induksi tiga fasa antara lain memiliki konstruksi yang sangat sederhana dan kuat khususnya motor induksi rotor sangkar, harganya yang murah, mempunyai effisiensi yang tinggi, dan tidak menggunakan sikat sehingga faktor gesekan dapat dihindari serta perawatannya yang lebih mudah.
2.2 Konstruksi Motor Induksi Tiga Fasa
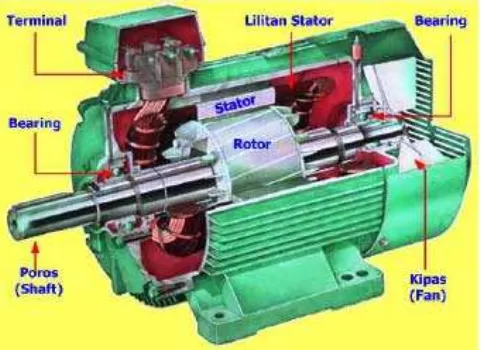
Secara umum motor induksi terdiri dari rotor dan stator. Rotor merupakan bagian yang berputar , sedangkan stator adalah bagian yang diam. Diantara stator dan rotor terdapat celah udara yang jaraknya sangat kecil. Konstruksi motor induksi dapat dilihat pada Gambar 2.1 dibawah ini.
Gambar 2.1. Konstruksi motor induksi tiga fasa
2.3 Jenis Motor Induksi Tiga Fasa
Ada dua jenis motor induksi tiga fasa berdasarkan rotornya yaitu : 1.Motor induksi tiga fasa sangkar tupai
2.Motor induksi tiga fasa rotor belitan.
Kedua motor ini bekerja pada prinsip yang sama dan mempunyai konstruksi stator yang sama tetapi berbeda pada konstruksi rotornya.
2.3.1 Motor Induksi Tiga Fasa Sangkar Tupai
Penampang motor sangkar tupai memiliki konstruksi yang sederhana. Inti stator pada motor sangkar tupai tiga fasa terbuat dari lapisan – lapisan pelat baja beralur yang didukung dalam rangka stator yang terbuat dari besi tuang atau pelat baja yang dipabrikasi. Lilitan – lilitan kumparan stator diletakkan dalam alur stator yang terpisah 120 derajat listrik. Lilitan fasa ini dapat disambung dalam hubungan delta ( Δ ) ataupun bintang ( Υ ).
Rotor jenis rotor sangkar ditunjukkan pada Gambar 2.2 di bawah ini.
Gambar 2.2 Rotor sangkar dan bagian- bagiannya
rotor dan kemudian dilas dengan kuat ke cincin ujung. Batang rotor motor sangkar tupai tidak selalu ditempatkan paralel terhadap poros motor tetapi kerapkali dimiringkan. Hal ini akan menghasilkan torsi yang lebih seragam dan juga mengurangi derau dengung magnetik sewaktu motor sedang berputar. Pada ujung cincin penutup dilekatkan sirip yang berfungsi sebagai pendingin.
2.3.2 Motor Induksi Tiga Fasa Rotor Belitan
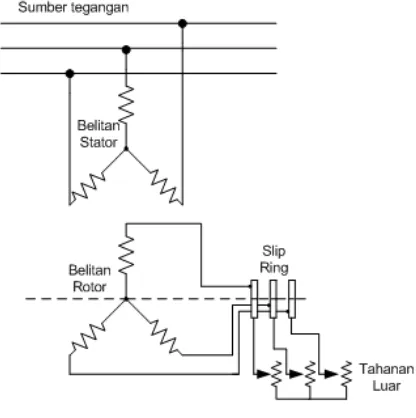
Motor rotor belitan berbeda dengan motor rotor sangkar tupai dalam hal konstruksi rotornya. Seperti namanya, rotor pada motor induksi rotor belitan dililit dengan lilitan terisolasi serupa dengan lilitan stator. Lilitan fasa rotor dihubungkan secara Υ dan masing – masing fasa ujung terbuka yang dikeluarkan ke cincin slip yang terpasang pada poros rotor. Secara skematik dapat dilihat pada Gambar 2.3. Dari gambar ini dapat dilihat bahwa cincin slip dan sikat semata – mata merupakan penghubung tahanan kendali variabel luar ke dalam rangkaian rotor.
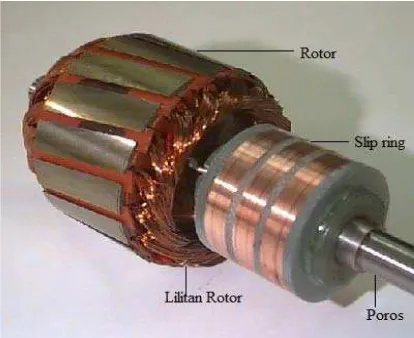
Pada motor ini, cincin slip yang terhubung ke sebuah tahanan variabel luar yang berfungsi membatasi arus pengasutan dan yang bertanggung jawab terhadap pemanasan rotor. Selama pengasutan, penambahan tahanan luar pada rangkaian rotor belitan menghasilkan torsi pengasutan yang lebih besar dengan arus pengasutan yang lebih kecil dibanding dengan rotor sangkar. Konstruksi motor tiga fasa rotor belitan ditunjukkan pada Gambar 2.4 di bawah ini.
Gambar 2.4 Rotor belitan motor induksi 3 fasa
2.4 Medan Putar
Perputaran motor pada mesin arus bolak – balik ditimbulkan oleh adanya medan putar (fluks yang berputar) yang dihasilkan dalam kumparan statornya. Medan putar ini terjadi apabila kumparan stator dihubungkan dalam fasa banyak, umumnya 3 fasa. Hubungan dapat berupa hubungan bintang atau delta.
t3, dan t4, fluks resultan yang ditimbulkan oleh kumparan tersebut masing –
masing adalah seperti Gambar 2.5c.
Pada t1 fluks resultan mempunyai arah sama dengan arah fluks yang
dihasilkan oleh kumparan a – a; sedangkan pada t2, fluks resultannya mempunyai
arah sama dengan arah fluks yang dihasilkan oleh kumparan c – c; dan untuk t3
fluks resultan mempunyai arah sama dengan fluks yang dihasilkan oleh kumparan b – b. Untuk t4, fluks resultannya berlawanan arah dengan fluks resultan yang
dihasilkan pada saat t1 keterangan ini akan lebih jelas pada analisa vektor.
Gambar 2.5 (a) Kumparan a –a; b –b; c –c dihubungkan 3 fasa (b) Arus tiga fasa setimbang
(c) Medan putar pada motor induksi tiga fasa
ns =
p 120.f
(2.1)
dimana:
ns= Kecepatan sinkron (rpm)
f = frekuensi sumber ( Hz ) p = jumlah kutub
2.4.1 Analisis Secara Vektor
Analisis secara vektor didapatkan atas dasar :
1. Arah fluks yang ditimbulkan oleh arus yang mengalir dalam suatu lingkar sesuai dengan perputaran sekrup (Gambar 2.6).
Gambar 2.6 Arah fluks yang ditimbulkan oleh arus yang mengalir dalam suatu lingkar
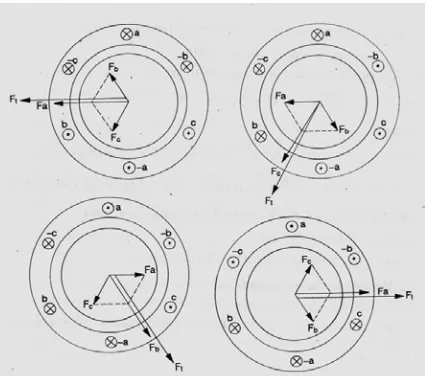
2. Besaran fluks yang ditimbulkan ini sebanding dengan arus yang mengalir. Notasi yang dipakai untuk menyatakan arah arus yang mengalir pada kumparan a – a, b – b, dan c – c pada Gambar 2.7a yaitu: arus masuk, apabila tanda silang (x) terletak pada pangkal konduktor tersebut (titik a, b, c), sedangkan arus keluar apabila tanda titik ( . ) terletak pada pangkal konduktor tersebut. Maka diagram vektor untuk fluks total pada keadaan t1, t2, t3, t4 pada Gambar 2.5, dapat
Gambar 2.7 Diagram vektor untuk fluks total pada keadaan t1, t2, t3, t4
Dari semua diagram vektor di atas dapat dilihat bahwa fluks resultan yang dihasilkan berputar.
2.5 Slip
Slip (s) = 100% n
n n
s r
s− ×
(2.2)
dimana: nr = kecepatan rotor (rpm)
Persamaan 2.2 di atas memberikan informasi yaitu :
1. saat s = 1 dimana nr = 0, ini berarti rotor masih dalam keadaan diam atau akan
berputar.
2. s = 0 menyatakan bahwa ns = nr, ini berarti rotor berputar sampai kecepatan
sinkron. Hal ini dapat terjadi jika ada arus dc yang diinjeksikan ke belitan rotor, atau rotor digerakkan secara mekanik.
3. 0 < s < 1, ini berarti kecepatan rotor diantara keadaan diam dengan kecepatan sinkron. Kecepatan rotor dalam keadaan inilah dikatakan kecepatan tidak sinkron.
2.6 Prinsip Kerja Motor Induksi Tiga Fasa
Secara umum prinsip kerja motor induksi tiga fasa dapat dijabarkan dalam langkah-langkah berikut:
1. Pada keadaan beban nol ketiga fasa stator yang dihubungkan dengan sumber tegangan tiga fasa yang setimbang menghasilkan arus pada tiap belitan fasa. 2. Arus pada tiap fasa menghasilkan fluksi bolak-balik yang berubah-ubah. 3. Amplitudo fluksi yang dihasilkan berubah secara sinusoidal dan arahnya tegak
lurus terhadap belitan fasa.
4. Akibat fluksi yang berputar timbul ggl pada stator motor yang besarnya adalah e1 =
dt dΦ N1
−
5. Penjumlahan ketiga fluksi bolak-balik secara periodik akan menghasilkan medan putar yang disebut dengan kecepatan sinkron ns. Besarnya nilai ns
ditentukan oleh jumlah kutub p dan frekuensi stator f yang dirumuskan sesuai dengan persamaan 2.1
6. Fluksi yang berputar tersebut akan memotong batang konduktor pada rotor. Akibatnya pada kumparan rotor timbul tegangan induksi (ggl) sebesar E2 yang
besarnya
E2 =4,44fN2Φm
dimana :
E1 = Tegangan pada stator (Volt)
E2 = Tegangan induksi pada rotor saat rotor dalam keadaan diam (Volt)
N1 = Jumlah lilitan kumparan stator
N2 = Jumlah lilitan kumparan rotor
Фm = Fluksi maksimum (Wb)
7. Karena kumparan rotor merupakan rangkaian tertutup, maka ggl tersebut akan menghasilkan arus I2.
8. Adanya arus I2 di dalam medan magnet akan menimbulkan gaya F pada rotor
9. Bila kopel mula yang dihasilkan oleh gaya F cukup besar untuk memikul kopel beban, rotor akan berputar searah medan putar stator.
10.Perputaran rotor akan semakin meningkat hingga mendekati kecepatan sinkron. Perbedaan kecepatan medan stator (ns) dan kecepatan rotor (nr)
disebut slip (s) dan dinyatakan dengan 100%
n n n s
s r
s− ×
11.Pada saat rotor dalam keadaan berputar, besarnya tegangan yang terinduksi pada kumparan rotor akan bervariasi tergantung besarnya slip. Tegangan induksi ini dinyatakan dengan E2s yang besarnya
E2s =4,44sfN2Φm ( Volt ) dimana
E2s = tegangan induksi pada rotor dalam keadaan berputar (Volt)
12.Bila ns = nr, tegangan tidak akan terinduksi dan arus tidak akan mengalir pada
kumparan rotor, karenanya tidak dihasilkan kopel. Kopel ditimbulkan jika nr <
ns.
2.7 Frekuensi Rotor
Ketika rotor masih dalam keadaan diam, dimana frekuensi arus pada rotor sama seperti frekuensi masukan. Tetapi ketika rotor akan berputar, maka frekuensi rotor akan bergantung kepada kecepatan relatif atau bergantung terhadap besarnya slip. Untuk besar slip tertentu, maka frekuensi rotor sebesar f' yaitu,
f’’ = (��−��)�
120
Dengan membagi frekuensi rotor setelah berputar dengan frekuensi sebelum berputar, maka didapatkan nilai sebagai berikut.
�′
� =
(��−��)
�� = s
Telah diketahui bahwa arus rotor dipengaruhi frekuensi rotor f =' sf dan ketika arus ini mengalir pada masing – masing fasa di belitan rotor, akan memberikan reaksi medan magnet. Biasanya medan magnet pada rotor akan menghasilkan medan magnet yang berputar yang besarnya tergantung atau relatif terhadap putaran rotor sebesar sns.
Pada keadaan tertentu, arus rotor dan arus stator menghasilkan distribusi medan magnet yang sinusoidal dimana medan magnet ini memiliki magnitud yang konstan dan kecepatan medan putar ns yang konstan. Kedua hal ini merupakan
medan magnetik yang berputar secara sinkron. Kenyataannya tidak seperti ini karena pada stator akan ada arus magnetisasi pada kumparannya.
2.8 Rangkaian Ekivalen Motor Induksi
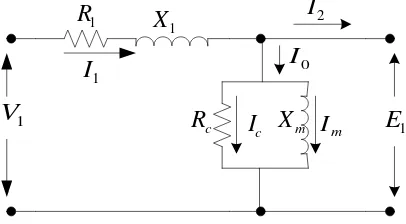
Untuk mempermudah analisis motor induksi, digunakan metoda rangkaian ekivalen per – fasa. Motor induksi dapat dianggap sebagai transformator dengan rangkaian sekunder berputar. Rangkaian ekivalen statornya dapat dilihat pada Gambar 2.8 berikut ini.
1
Gambar2.8 Rangkaian ekivalen stator motor induksi dimana :
V1 = tegangan terminal stator ( Volt )
E1 = ggl lawan yang dihasilkan oleh fluks celah udara resultan ( Volt )
I1 = arus stator ( Ampere )
R1 = tahanan efektif stator ( Ohm )
X1 = reaktansi bocor stator ( Ohm )
Arus stator terbagi atas 2 komponen, yaitu komponen arus beban dan komponen arus penguat I0. Komponen arus penguat I0 merupakan arus stator
tambahan yang diperlukan untuk menghasilkan fluksi celah udara resultan, dan merupakan fungsi ggm E1.
Komponen arus penguat I0 terbagi atas komponen rugi – rugi inti IC yang
sefasa dengan E1 dan komponen magnetisasi IM yang tertinggal 900 dari E1.
Hubungan antara tegangan yang diinduksikan pada rotor sebenarnya ( Erotor ) dan
tegangan yang diinduksikan pada rotor ekivalen ( E2S ) adalah :
dimana a adalah jumlah lilitan efektif tiap fasa pada lilitan stator yang banyaknya a kali jumlah lilitan rotor.
Bila rotor diganti secara magnetik, lilitan – ampere masing – masing harus sama, dan hubungan antara arus rotor sebenarnya Irotor dan arus I2S pada rotor
sehingga hubungan antara impedansi bocor frekuensi slip Z2S dari rotor ekivalen
dan impedansi bocor frekuensi slip Zrotor dari rotor sebenarnya adalah :
Z2S = =
Nilai tegangan, arus dan impedansi tersebut diatas didefinisikan sebagai nilai yang referensinya ke stator.
Selanjutnya persamaan 2.7 dapat dituliskan : =
Z2S = impedansi bocor rotor frekuensi slip tiap fasa dengan referensi ke
stator (Ohm)
R2 = tahanan efektif referensi (Ohm)
sX2 = reaktansi bocor referensi pada frekuensi slip X2 didefinisikan
sebagai harga reaktansi bocor rotor dengan referensi frekuensi stator (Ohm).
Reaktansi yang didapat pada persamaan 2.8 dinyatakan dalam cara yang demikian karena sebanding dengan frekuensi rotor dan slip. Jadi X2 didefinisikan sebagai harga yang akan dimiliki oleh reaktansi bocor pada rotor dengan patokan pada frekuensi stator.
slip sebesar E2s dan ggl lawan stator E1. Bila bukan karena efek kecepatan, tegangan rotor akan sama dengan tegangan stator, karena lilitan rotor identik dengan lilitan stator. Karena kecepatan relatif gelombang fluks terhadap rotor adalah s kali kecepatan terhadap stator, hubungan antara ggl efektif pada stator dan rotor adalah:
E2s = sE1 (2.9) Gelombang fluks magnetik pada rotor dilawan oleh fluks magnetik yang dihasilkan komponen beban I2 dari arus stator, dan karenanya, untuk harga efektif
I2s= I2 (2.10) Dengan membagi persamaan 2.9 dengan persamaan 2.10 didapatkan:
=
Didapat hubungan antara persamaan 2.10 dengan persamaan 2.11, yaitu
=
Dengan membagi persamaan 2.12 dengan s, maka didapat
s
Gambar2.9 Rangkaian ekivalen pada rotor motor induksi.
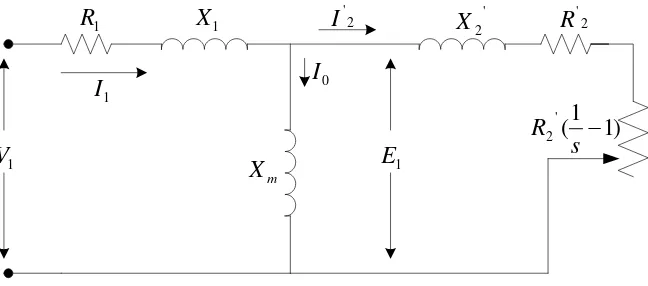
Dari penjelasan mengenai rangkaian ekivalen pada stator dan rotor di atas, maka dapat dibuat rangkaian ekivalen motor induksi tiga fasa pada masing – masing fasanya. Perhatikan Gambar 2.10 di bawah ini.
1
Gambar2.10 Rangkaian ekivalen motor induksi tiga fasa
1
Gambar2.11 Rangkaian ekivalen dilihat dari sisi stator motor induksi
dimana:
1 V
1
R X1
m X
2 ' R '
2 X
) 1 1 (
'
2 −
s R
1 E 1
I I0
2 ' I