Simulasi Sistem Otomasi Pompa untuk Pengukuran Volume Minyak pada Tanki Diesel dengan Menggunakan Sensor Ultrasonik Ping))) Parallax Berbasis Mikrokontroller At89S51
Teks penuh
Gambar
![Gambar 2.6 Arsitektur dan Susunan Pin Mikrokontroler AT89S51[3]](https://thumb-ap.123doks.com/thumbv2/123dok/275358.24410/31.595.132.510.256.486/gambar-arsitektur-dan-susunan-pin-mikrokontroler-at-s.webp)
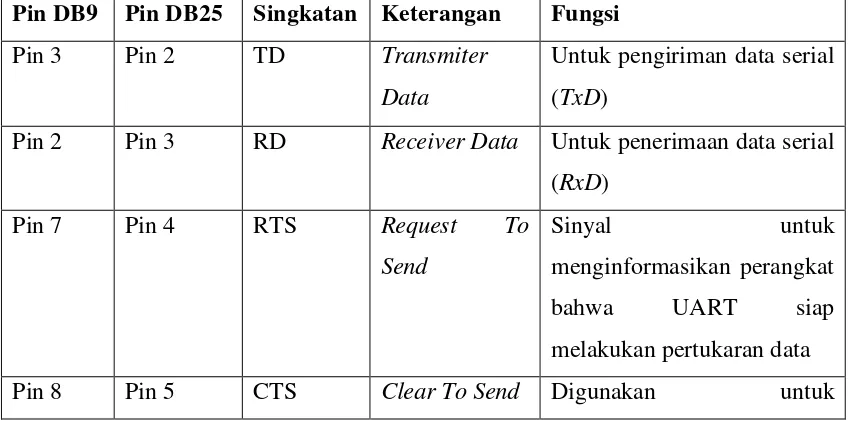
![Gambar 2.7 Susunan pin DB9[4].](https://thumb-ap.123doks.com/thumbv2/123dok/275358.24410/38.595.143.481.165.341/gambar-susunan-pin-db.webp)
![Gambar 2.8 Skema Diagram dan Bentuk Fisik IC MAX232[13]](https://thumb-ap.123doks.com/thumbv2/123dok/275358.24410/39.595.121.524.264.560/gambar-skema-diagram-dan-bentuk-fisik-ic-max.webp)
![Gambar. 2.9 Skema relay elektromagnetik[12]](https://thumb-ap.123doks.com/thumbv2/123dok/275358.24410/40.595.182.458.430.583/gambar-skema-relay-elektromagnetik.webp)
![Gambar 2.10. Motor Pendorong (pompa)[8]](https://thumb-ap.123doks.com/thumbv2/123dok/275358.24410/41.595.231.401.124.278/gambar-motor-pendorong-pompa.webp)
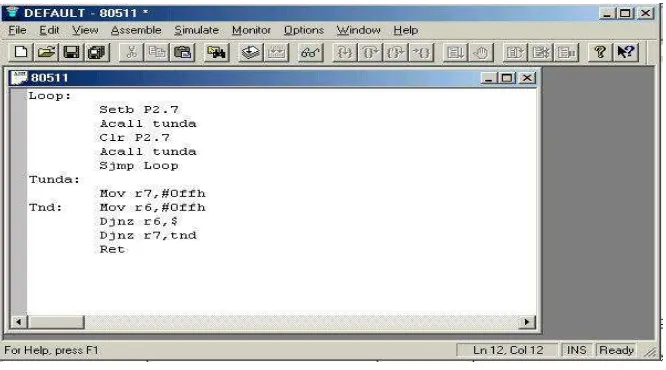
![Gambar 2.12 Tampilan software downloader[3]](https://thumb-ap.123doks.com/thumbv2/123dok/275358.24410/46.595.173.458.381.609/gambar-tampilan-software-downloader.webp)
![Gambar 2.13 Interface Antar Muka Visual Basic 6.0[2]](https://thumb-ap.123doks.com/thumbv2/123dok/275358.24410/47.595.169.461.474.711/gambar-interface-antar-muka-visual-basic.webp)
Dokumen terkait
Dari hasil interpretasi rekaman seismik dasar laut diketahui terdapat lapisan dasar laut berupa parallel yang mencirikan lapisan batuan sedimen permukaan yang
Teknik sampling yang digunakan dalam penelitian ini adalah teknik simple random sampling atau pengambilan sampel secara acak, karena populasi dianggap homogen pada pelanggan surat
Disertasi PEMAHAMAN ELITE PKB KOTA KEDIRI..
Sehingga loyalitas pelanggan dapat diartikan sebagai sebuah sikap yang menjadi dorongan perilaku untuk melakukan pembelian produk atau jasa dari suatu perusahaan
Achmad Muachor, 201110225027, Fakultas Teknik Informatika Universitas Bhayangkara Jakarta Raya, dengan judul skripsi ” Sistem Informasi Geografis Kelompok Bimbingan
Abstrak : Tujuan penelitian ini untuk mengetahui hubungan pengalaman dirawat dengan loyalitas pasien rawat inap di bangsal penyakit dalam RSUD Panembahan Senopati
dengan menggunakan metode Moving Average 4 bulan dan Weigth Moving Average 4 bulan memiliki hasil yang lebih baik, yaitu sebesar Rp 1.288.284.415 dan kesalahan penelitian yang
- Bahwa pada hari dan tempat tersebut diatas berawal dari anak melihat rumah milik saksi Korban yang terletak bersebelahan dengan rumah orangtua anak dalam keadaan
